Path Planning. Ioannis Rekleitis
|
|
|
- Spencer Parrish
- 5 years ago
- Views:
Transcription
1 Path Planning Ioannis Rekleitis
2 Outline Path Planning Visibility Graph Potential Fields Bug Algorithms Skeletons/Voronoi Graphs C-Space CSCE-574 Robotics 2

3 Mo+on Planning The ability to go from A to B Known map Off-line planning Unknown Environment Online planning Static/Dynamic Environment q init q goal q goal q goal q init q init CSCE-574 Robotics 3
4 Path Planning World Robot Map CSCE-574 Robotics 4
5 Path Planning Robot World Indoor/Outdoor 2D/2.5D/3D Static/Dynamic Known/Unknown Abstract (web) Map CSCE-574 Robotics 5
6 Path Planning World Robot CSCE-574 Robotics Mobile Ø Indoor/Outdoor Ø Walking/Flying/Swimming Manipulator Humanoid Abstract Map 6
7 Path Planning World Robot Map Topological Metric Feature Based 1D,2D,2.5D,3D CSCE-574 Robotics 7
8 Path Planning World Robot CSCE-574 Robotics Indoor/Outdoor 2D/2.5D/3D Static/Dynamic Known/Unknown Abstract (web) Mobile Ø Indoor/Outdoor Ø Walking/Flying/Swimming Manipulator Humanoid Abstract Map Topological Metric Feature Based 1D,2D,2.5D,3D 8
 Polygonal Representation q init q goal")
9 Path Planning: Assump+ons Known Map Roadmaps (Graph representations) Polygonal Representation q init q goal CSCE-574 Robotics 9
10 Visibility Graph Connect Initial and goal locations with all the visible vertices q init q goal CSCE-574 Robotics 10
11 Visibility Graph Connect initial and goal locations with all the visible vertices Connect each obstacle vertex to every visible obstacle vertex q init q goal CSCE-574 Robotics 11
12 Visibility Graph Connect initial and goal locations with all the visible vertices Connect each obstacle vertex to every visible obstacle vertex Remove edges that intersect the interior of an obstacle q init q goal CSCE-574 Robotics 12
13 Visibility Graph Connect initial and goal locations with all the visible vertices Connect each obstacle vertex to every visible obstacle vertex Remove edges that intersect the interior of an obstacle Plan on the resulting graph q init q goal CSCE-574 Robotics 13
14 An alternative path Visibility Graph Alternative name: Rubber band algorithm q init q goal CSCE-574 Robotics 14

15 Major Fault Point robot Path planning like that guarantees to hit the obstacles CSCE-574 Robotics 15

16 Path Planning Potential Field methods compute a repulsive force away from obstacles CSCE-574 Robotics 16

17 Local techniques Potential Field methods compute a repulsive force away from obstacles compute an attractive force toward the goal CSCE-574 Robotics 17
18 Local techniques Potential Field methods compute a repulsive force away from obstacles compute an attractive force toward the goal let the sum of the forces control the robot CSCE-574 Robotics 18 key advantages?
19 Local techniques Potential Field methods compute a repulsive force away from obstacles compute an attractive force toward the goal let the sum of the forces control the robot CSCE-574 Robotics To a large extent, this is 19 computable from sensor readings
20 Sensor Based Calculations CSCE-574 Robotics 20
21 Major Problem? CSCE-574 Robotics 21
22 Local Minima! F goal F obst CSCE-574 Robotics 22
23 Simulated Annealing Every so often add some random force CSCE-574 Robotics 23
24 Limited-knowledge path planning Path planning with limited knowledge Insect-inspired bug algorithms Goal known direction to goal otherwise local sensing walls/obstacles encoders reasonable world 1. finitely many obstacles in any finite disc 2. a line will intersect an obstacle finitely many times Start CSCE-574 Robotics 24




25 Not truly modeling bugs... Insects do use several cues for navigation: visual landmarks polarized light chemical sensing neither are the current bugsized robots they re not ears... Other animals use information from magnetic fields electric currents temperature CSCE-574 Robotics bacteria 25 migrating bobolink
26 Bug Strategy Insect-inspired bug algorithms known direction to goal otherwise only local sensing walls/obstacles encoders Bug 0 algorithm 1) head toward goal 2) follow obstacles until you can head toward the goal again 3) continue assume a leftturn robot CSCE-574 Robotics 26
27 Does It Work? CSCE-574 Robotics 27
28 Bug 1 Insect-inspired bug algorithms known direction to goal otherwise only local sensing walls/obstacles encoders Bug 1 algorithm 1) head toward goal CSCE-574 Robotics 28
29 Bug 1 Insect-inspired bug algorithms known direction to goal otherwise only local sensing walls/obstacles encoders Bug 1 algorithm 1) head toward goal 2) if an obstacle is encountered, circumnavigate it and remember how close you get to the goal CSCE-574 Robotics 29
30 Bug 1 Insect-inspired bug algorithms known direction to goal otherwise only local sensing walls/obstacles encoders Bug 1 algorithm 1) head toward goal 2) if an obstacle is encountered, circumnavigate it and remember how close you get to the goal 3) return to that closest point (by wall-following) and continue Vladimir Lumelsky & Alexander Stepanov Algorithmica 1987 CSCE-574 Robotics 30
31 Bug 1 analysis Distance Traveled What are bounds on the path length that the robot takes? Available Information: D = straight-line distance from start to goal P i = perimeter of the i th obstacle D P 2 Lower and upper bounds? Lower bound: Upper bound: P 1 CSCE-574 Robotics 31
32 Bug 1 analysis Distance Traveled What are bounds on the path length that the robot takes? Available Information: D = straight-line distance from start to goal P i = perimeter of the i th obstacle Lower and upper bounds? D P 2 Lower bound: Upper bound: D P 1 CSCE-574 Robotics 32
33 Bug 1 analysis Distance Traveled What are bounds on the path length that the robot takes? Available Information: D = straight-line distance from start to goal P i = perimeter of the i th obstacle Lower and upper bounds? Lower bound: D D P 2 Upper bound: D Σ P i i How good a bound? P 1 How good an algorithm? CSCE-574 Robotics 33
34 Bug Mapping CSCE-574 Robotics 34
35 A better bug? Call the line from the starting point to the goal the s-line Bug 2 algorithm CSCE-574 Robotics 35
36 A better bug? Call the line from the starting point to the goal the s-line Bug 2 algorithm 1) head toward goal on the s-line CSCE-574 Robotics 36
37 A better bug? Call the line from the starting point to the goal the s-line Bug 2 algorithm 1) head toward goal on the s-line 2) if an obstacle is in the way, follow it until encountering the s- line again. CSCE-574 Robotics 37
38 A better bug? s-line Bug 2 algorithm 1) head toward goal on the s-line 2) if an obstacle is in the way, follow it until encountering the s- line again. 3) Leave the obstacle and continue toward the goal CSCE-574 Robotics 38 OK?
39 A better bug? Bug 2 algorithm Start 1) head toward goal on the s-line 2) if an obstacle is in the way, follow it until encountering the s- line again closer to the goal. 3) Leave the obstacle and continue toward the goal Goal CSCE-574 Robotics 39 OK?
40 Bug 2 analysis Distance Traveled What are bounds on the path length that the robot takes? Available Information: Start D = straight-line distance from start to goal P i = perimeter of the i th obstacle Lower and upper bounds? Lower bound: Upper bound: Goal CSCE-574 Robotics 40
41 Bug 2 analysis Distance Traveled What are bounds on the path length that the robot takes? Available Information: Start D = straight-line distance from start to goal P i = perimeter of the i th obstacle N i = number of s-line intersections with the i th obstacle Lower and upper bounds? Lower bound: Upper bound: Goal CSCE-574 Robotics 41
42 Bug 2 analysis Distance Traveled What are bounds on the path length that the robot takes? Available Information: Start D = straight-line distance from start to goal P i = perimeter of the i th obstacle N i = number of s-line intersections with the i th obstacle Lower and upper bounds? Lower bound: D Upper bound: Goal CSCE-574 Robotics 42
43 Bug 2 analysis Distance Traveled Start What are bounds on the path length that the robot takes? Available Information: D = straight-line distance from start to goal P i = perimeter of the i th obstacle N i = number of s-line intersections with the i th obstacle Lower and upper bounds? Lower bound: D Upper bound: D Σ N i P i i Goal CSCE-574 Robotics 43
44 head-to-head comparison or thorax-to-thorax, perhaps What are worlds in which Bug 2 does better than Bug 1 (and vice versa)? Bug 2 beats Bug 1 Bug 1 beats Bug 2 CSCE-574 Robotics 44
45 head-to-head comparison or thorax-to-thorax, perhaps What are worlds in which Bug 2 does better than Bug 1 (and vice versa)? Bug 2 beats Bug 1 Bug 1 beats Bug 2 zipper world CSCE-574 Robotics 45
46 Other bug-like algorithms The Pledge maze-solving algorithm 1. Go to a wall 2. Keep the wall on your right 3. Continue until out of the maze CSCE-574 Robotics 46
![Other bug-like algorithms The Pledge maze-solving algorithm 1) Go to a wall 2) Keep the wall on your right 3) Continue until out of the maze int a[1817];main(z,p,q,r){for(p=80;q+p-80;p=2*a[p])](/docs-images/96/129257859/images/47-1.jpg "for(z=9;z--;)q=3&(r=time(0)+r*57)/7,q=q?q-1?q-2?1- p%79?-1:0:p%79-77?1:0:p<1659?79:0:p>158?-79:0,q?! a[p+q*2]?a[p+=a[p+=q]=q]=q:0:0;for(;q+ +-1817;)printf(q%79?\"%c\":\"%c\n\",\" #\"[!")
47 Other bug-like algorithms The Pledge maze-solving algorithm 1) Go to a wall 2) Keep the wall on your right 3) Continue until out of the maze int a[1817];main(z,p,q,r){for(p=80;q+p-80;p=2*a[p]) for(z=9;z--;)q=3&(r=time(0)+r*57)/7,q=q?q-1?q-2?1- p%79?-1:0:p%79-77?1:0:p<1659?79:0:p>158?-79:0,q?! a[p+q*2]?a[p+=a[p+=q]=q]=q:0:0;for(;q ;)printf(q%79?"%c":"%c\n"," #"[!a[q-1]]);} IOCCC random maze generator ############################################################################### # # ### # # # # # # # # # # # # # # # # ####### ##### ##### # ####### # # ### ### # ##### ##### # ### ##### # ### # # # # # # # # # # # # # # # # # # # # # # ##### # # # # # # ##### ##### # ### ### # # # ### ### ### ##### # ### ##### # # # # # # # # # # # # # # # # # # # ### ##### ### ##### ##### ### # ### # # # # ### ##### ### ##### # ##### ### # # # # # # # # # # # # # # # # # # # # # # ######### ##### # # # ########### ### ########### ### ##### ##### # # # ### # # # # # # # # # # # # # # # # # # # # # # # # ### ### ##### ####### ### # # ### # # # # ##### # # ##### # # # ### # # ##### # # # # # # # # # # # ### # # # # # # # # # ### # ### # ##### ### # ##### # # # ##### ##### ### ### ####### # ##### # ### # # # # # # # # # # # # # # # # # # # # # # # # # # # ########### ### ### ### ####### # # ### # ####### ### ##### ### ### ##### # # # # # # # # # # # # # # # # # # # ### ##### ##### # ####### # ### ####### ### # ### ####### ### ##### ### # # # # # # # # # # # # # # # # # # # # # # # # # ### ### ### # # # # ### # # # ### # ####### # # ####### # # # # # # ### # # # # # # # # # # # # # # # # # # # # # # # # ### ##### ####### # ##### # ##### ### ### # # # ### ##### ### # ### # # # # # # # # ### # # # # # # # # # # # # # ############################################################################### discretized RRT CSCE-574 Robotics 47 mazes of unusual origin

48 Limited Range Sensor Tangent Bug Tangent Bug relies on finding endpoints of finite, continues segments of the obstacles CSCE-574 Robotics 48
49 Tangent Bug CSCE-574 Robotics 49

50 Contact Sensor Tangent Bug 1. Robot moves toward goal until it hits obstacle 1 at H1 2. Pretend there is an infinitely small sensor range and the direction which minimizes the heuristic is to the right 3. Keep following obstacle until robot can go toward obstacle again 4. Same situation with second obstacle 5. At third obstacle, the robot turned left until it could not increase heuristic 6. D_followed is distance between M3 and goal, d_reach is distance between robot and goal because sensing distance is zero CSCE-574 Robotics 50

51 Limited Sensor Range Tangent-Bug CSCE-574 Robotics 51

52 Infinite Sensor Range Tangent Bug CSCE-574 Robotics 52

53 Known Map Brushfire Transform CSCE-574 Robotics 53
54 The Wavefront Planner: Setup CSCE-574 Robotics 54
55 The Wavefront in Action (Part 1) Starting with the goal, set all adjacent cells with 0 to the current cell Point Connectivity or 8-Point Connectivity? Your Choice. We ll use 8-Point Connectivity in our example CSCE-574 Robotics 55
56 The Wavefront in Action (Part 2) Now repeat with the modified cells This will be repeated until no 0 s are adjacent to cells with values >= 2 0 s will only remain when regions are unreachable CSCE-574 Robotics 56
57 The Wavefront in Action (Part 3) Repeat CSCE-574 Robotics 57
 Repeat CSCE-574 Robotics")
58 The Wavefront in Action (Part 3) Repeat CSCE-574 Robotics 58
59 The Wavefront in Action (Part 3) Until Done 0 s would only remain in the unreachable areas CSCE-574 Robotics 59
60 The Wavefront in Action To find the shortest path, according to your metric, simply always move toward a cell with a lower number The numbers generated by the Wavefront planner are roughly proportional to their distance from the goal CSCE-574 Robotics 60 Two possible shortest paths shown
61 An alternative roadmap CSCE-574 Robotics 61
62 Voronoi diagrams These line segments make up the Voronoi diagram for the four points shown here. Solves the Post Office Problem CSCE-574 Robotics 62

63 Voronoi diagrams These line segments make up the Voronoi diagram for the four points shown here. Solves the Post Office Problem or, perhaps, more important problems... CSCE-574 Robotics 63
64 Voronoi diagrams true Voronoi diagram (isolates a set of points) generalized Voronoi diagram What is it? CSCE-574 Robotics 64
65 Voronoi diagrams C free Let B = the boundary of C free. Let q be a point in C free. ( ) q B CSCE-574 Robotics 65
66 Voronoi diagrams C free Let B = the boundary of C free. Let q be a point in C free. q B Define clearance(q) = min { q - p }, for all p B CSCE-574 Robotics 66
67 Voronoi diagrams C free Let B = the boundary of C free. Let q be a point in C free. q B Define clearance(q) = min { q - p }, for all p B Define near(q) = { p B such that q - p = clearance(q) } CSCE-574 Robotics 67
68 Voronoi diagrams Evaluation + maximizes distance from obstacles + reduces to graph search C free + can be used in higher-dimensions - nonoptimal - real diagrams tend to be noisy Let B = the boundary of C free. q Let q be a point in C free. B Define clearance(q) = min { q - p }, for all p B Define near(q) = { p B such that q - p = clearance(q) } q is in the Voronoi diagram of C free if near(q) > 1 CSCE-574 Robotics number of set elements 68

69 Generalized Voronoi Graph (GVG) CSCE-574 Free Space Robotics 69
70 Generalized Voronoi Graph (GVG) CSCE-574 Robotics Free Space with Topological Map (GVG) 70
71 Generalized Voronoi Graph (GVG) Access GVG Free CSCE-574 Space Robotics with Topological Map (GVG) 71
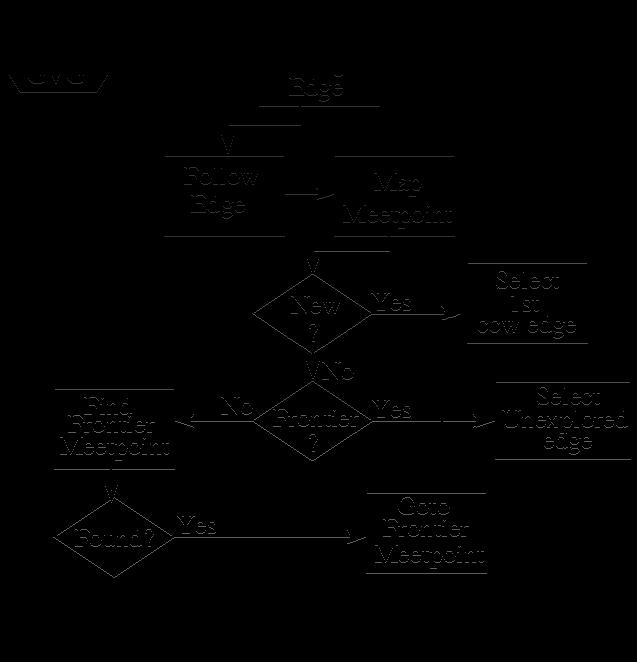
72 Generalized Voronoi Graph (GVG) Access GVG Follow Edge Free Space with Topological Map (GVG) CSCE-574 Robotics 72
73 Generalized Voronoi Graph (GVG) Access GVG Follow Edge Home to the MeetPoint Free Space with Topological Map (GVG) CSCE-574 Robotics 73
 CSCE-574")
74 Generalized Voronoi Graph (GVG) Access GVG Follow Edge Home to the MeetPoint Select Edge Free Space with Topological Map (GVG) CSCE-574 Robotics 74
 Onboard 1.")
75 GVG construction using sonar Nomadic Scout Sonar (GVG navigation) Camera with omni-directional mirror (feature detection) Onboard 1.2 GHz processor CSCE-574 Robotics 75

76 GVG construction using sonar CSCE-574 Robotics 76
77 GVG construction using sonar CSCE-574 Robotics 77


78 Slammer in Action CSCE-574 Robotics 78



79 Removing Edges CSCE-574 Robotics 79
80 Meetpoint Detection 3σ uncertainty ellipse of explored meetpoints Meetpoint degree (branching factor) Distances to local obstacles Relative angle bearings Edge signature Edge length Edge Curvature Vertex signal CSCE-574 Robotics 80



81 Ear-based Exploration CSCE-574 Robotics 81


82 Uncertainty Reduction Before Loop-closure After Loop-closure CSCE-574 Robotics 82


83 Simulation Code available online at CSCE-574 Robotics 83
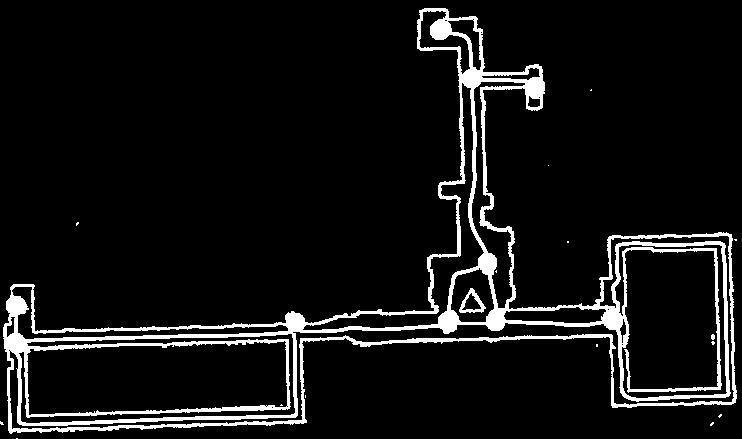


84 Real Environment CSCE-574 Robotics 84



85 Voronoi applications A retraction of a 3d object == medial surface what? Skeletonizations resulting from constant-speed curve evolution in 2d, it s called a medial axis CSCE-574 Robotics 85
86 skeleton shape curve evolution where wavefronts collide centers of maximal disks again reduces a 2d (or higher) problem to a question about graphs... CSCE-574 Robotics 86
 problem to a question about graphs.")
87 skeleton shape curve evolution where wavefronts collide centers of maximal disks again reduces a 2d (or higher) problem to a question about graphs... CSCE-574 Robotics 87 graph matching
88 Problems The skeleton is sensitive to small changes in the object s boundary. - graph isomorphism (and lots CSCE-574 of other Robotics graph questions) : NP-complete 88
 CSCE-574 Robotics 89 recomputing in")
89 Roadmap problems If an obstacle decides to roll away... (or wasn t there to begin with) CSCE-574 Robotics 89 recomputing in less than O(N 2 ) time?
Roadmaps. Vertex Visibility Graph. Reduced visibility graph, i.e., not including segments that extend into obstacles on either side.
 Roadmaps Vertex Visibility Graph Full visibility graph Reduced visibility graph, i.e., not including segments that extend into obstacles on either side. (but keeping endpoints roads) what else might we
Roadmaps Vertex Visibility Graph Full visibility graph Reduced visibility graph, i.e., not including segments that extend into obstacles on either side. (but keeping endpoints roads) what else might we
Robot Motion Control and Planning
 Robot Motion Control and Planning http://www.ceng.metu.edu.tr/~saranli/courses/ceng786 Lecture 2 Bug Algorithms Uluç Saranlı http://www.ceng.metu.edu.tr/~saranli CENG786 - Robot Motion Control and Planning
Robot Motion Control and Planning http://www.ceng.metu.edu.tr/~saranli/courses/ceng786 Lecture 2 Bug Algorithms Uluç Saranlı http://www.ceng.metu.edu.tr/~saranli CENG786 - Robot Motion Control and Planning
Motion Planning. Howie CHoset
 Motion Planning Howie CHoset What is Motion Planning? What is Motion Planning? Determining where to go Overview The Basics Motion Planning Statement The World and Robot Configuration Space Metrics Algorithms
Motion Planning Howie CHoset What is Motion Planning? What is Motion Planning? Determining where to go Overview The Basics Motion Planning Statement The World and Robot Configuration Space Metrics Algorithms
What s Special About Bugs
 Robotic Motion Planning: Bug Algorithms University of Denver ENCE 4800 Richard Voyles What s Special About Bugs Many planning algorithms assume global knowledge Bug algorithms assume only local knowledge
Robotic Motion Planning: Bug Algorithms University of Denver ENCE 4800 Richard Voyles What s Special About Bugs Many planning algorithms assume global knowledge Bug algorithms assume only local knowledge
Robotic Motion Planning: Bug Algorithms
 Robotic Motion Planning: Bug Algorithms Robotics Institute 16-735 http://voronoi.sbp.ri.cmu.edu/~motion Howie Choset http://voronoi.sbp.ri.cmu.edu/~choset What s Special About Bugs Many planning algorithms
Robotic Motion Planning: Bug Algorithms Robotics Institute 16-735 http://voronoi.sbp.ri.cmu.edu/~motion Howie Choset http://voronoi.sbp.ri.cmu.edu/~choset What s Special About Bugs Many planning algorithms
Robotic Motion Planning: Bug Algorithms (with some discussion on curve tracing and sensors)
") Robotic Motion Planning: Bug Algorithms (with some discussion on curve tracing and sensors) Robotics Institute 16-735 http://voronoi.sbp.ri.cmu.edu/~motion Howie Choset http://voronoi.sbp.ri.cmu.edu/~choset
Robotic Motion Planning: Bug Algorithms (with some discussion on curve tracing and sensors) Robotics Institute 16-735 http://voronoi.sbp.ri.cmu.edu/~motion Howie Choset http://voronoi.sbp.ri.cmu.edu/~choset
Motion Planning. Howie CHoset
 Motion Planning Howie CHoset Questions Where are we? Where do we go? Which is more important? Encoders Encoders Incremental Photodetector Encoder disk LED Photoemitter Encoders - Incremental Encoders -
Motion Planning Howie CHoset Questions Where are we? Where do we go? Which is more important? Encoders Encoders Incremental Photodetector Encoder disk LED Photoemitter Encoders - Incremental Encoders -
Robotic Motion Planning: Bug Algorithms
 Robotic Motion Planning: Bug Algorithms Robotics Institute 16-735 http://voronoi.sbp.ri.cmu.edu/~motion Howie Choset http://voronoi.sbp.ri.cmu.edu/~choset What s Special About Bugs Many planning algorithms
Robotic Motion Planning: Bug Algorithms Robotics Institute 16-735 http://voronoi.sbp.ri.cmu.edu/~motion Howie Choset http://voronoi.sbp.ri.cmu.edu/~choset What s Special About Bugs Many planning algorithms
Autonomous Mobile Robots, Chapter 6 Planning and Navigation Where am I going? How do I get there? Localization. Cognition. Real World Environment
 Planning and Navigation Where am I going? How do I get there?? Localization "Position" Global Map Cognition Environment Model Local Map Perception Real World Environment Path Motion Control Competencies
Planning and Navigation Where am I going? How do I get there?? Localization "Position" Global Map Cognition Environment Model Local Map Perception Real World Environment Path Motion Control Competencies
Motion Planning, Part IV Graph Search Part II. Howie Choset
 Motion Planning, Part IV Graph Search Part II Howie Choset Map-Based Approaches: Properties of a roadmap: Roadmap Theory Accessibility: there exists a collision-free path from the start to the road map
Motion Planning, Part IV Graph Search Part II Howie Choset Map-Based Approaches: Properties of a roadmap: Roadmap Theory Accessibility: there exists a collision-free path from the start to the road map
Visibility Graph. How does a Mobile Robot get from A to B?
 Robot Path Planning Things to Consider: Spatial reasoning/understanding: robots can have many dimensions in space, obstacles can be complicated Global Planning: Do we know the environment apriori? Online
Robot Path Planning Things to Consider: Spatial reasoning/understanding: robots can have many dimensions in space, obstacles can be complicated Global Planning: Do we know the environment apriori? Online
Unit 5: Part 1 Planning
 Unit 5: Part 1 Planning Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland March 25, 2014 COMP 4766/6778 (MUN) Planning March 25, 2014 1 / 9 Planning Localization
Unit 5: Part 1 Planning Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland March 25, 2014 COMP 4766/6778 (MUN) Planning March 25, 2014 1 / 9 Planning Localization
ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space
 ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Tianyu Wang: tiw161@eng.ucsd.edu Yongxi Lu: yol070@eng.ucsd.edu
ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Tianyu Wang: tiw161@eng.ucsd.edu Yongxi Lu: yol070@eng.ucsd.edu
Navigation and Metric Path Planning
 Navigation and Metric Path Planning October 4, 2011 Minerva tour guide robot (CMU): Gave tours in Smithsonian s National Museum of History Example of Minerva s occupancy map used for navigation Objectives
Navigation and Metric Path Planning October 4, 2011 Minerva tour guide robot (CMU): Gave tours in Smithsonian s National Museum of History Example of Minerva s occupancy map used for navigation Objectives
Lecture 11 Combinatorial Planning: In the Plane
 CS 460/560 Introduction to Computational Robotics Fall 2017, Rutgers University Lecture 11 Combinatorial Planning: In the Plane Instructor: Jingjin Yu Outline Convex shapes, revisited Combinatorial planning
CS 460/560 Introduction to Computational Robotics Fall 2017, Rutgers University Lecture 11 Combinatorial Planning: In the Plane Instructor: Jingjin Yu Outline Convex shapes, revisited Combinatorial planning
Metric Planning: Overview
 Also called quantitative planning Tries to find optimal path to goal Metric Planning: Overview As opposed to some path as per qualitative approach Usually plans path as series of subgoals (waypoints) Optimal/best
Also called quantitative planning Tries to find optimal path to goal Metric Planning: Overview As opposed to some path as per qualitative approach Usually plans path as series of subgoals (waypoints) Optimal/best
Planning: Part 1 Classical Planning
 Planning: Part 1 Classical Planning Computer Science 6912 Department of Computer Science Memorial University of Newfoundland July 12, 2016 COMP 6912 (MUN) Planning July 12, 2016 1 / 9 Planning Localization
Planning: Part 1 Classical Planning Computer Science 6912 Department of Computer Science Memorial University of Newfoundland July 12, 2016 COMP 6912 (MUN) Planning July 12, 2016 1 / 9 Planning Localization
Path Planning. Marcello Restelli. Dipartimento di Elettronica e Informazione Politecnico di Milano tel:
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02 2399 3470 Path Planning Robotica for Computer Engineering students A.A. 2006/2007
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02 2399 3470 Path Planning Robotica for Computer Engineering students A.A. 2006/2007
Mobile Robots: An Introduction.
 Mobile Robots: An Introduction Amirkabir University of Technology Computer Engineering & Information Technology Department http://ce.aut.ac.ir/~shiry/lecture/robotics-2004/robotics04.html Introduction
Mobile Robots: An Introduction Amirkabir University of Technology Computer Engineering & Information Technology Department http://ce.aut.ac.ir/~shiry/lecture/robotics-2004/robotics04.html Introduction
Robotic Motion Planning: Cell Decompositions (with some discussion on coverage and pursuer/evader)
") Robotic Motion Planning: Cell Decompositions (with some discussion on coverage and pursuer/evader) Robotics Institute 16-735 http://voronoi.sbp.ri.cmu.edu/~motion Howie Choset http://voronoi.sbp.ri.cmu.edu/~choset
Robotic Motion Planning: Cell Decompositions (with some discussion on coverage and pursuer/evader) Robotics Institute 16-735 http://voronoi.sbp.ri.cmu.edu/~motion Howie Choset http://voronoi.sbp.ri.cmu.edu/~choset
Road Map Methods. Including material from Howie Choset / G.D. Hager S. Leonard
 Road Map Methods Including material from Howie Choset The Basic Idea Capture the connectivity of Q free by a graph or network of paths. 16-735, Howie Choset, with significant copying from who loosely based
Road Map Methods Including material from Howie Choset The Basic Idea Capture the connectivity of Q free by a graph or network of paths. 16-735, Howie Choset, with significant copying from who loosely based
Introduction to Information Science and Technology (IST) Part IV: Intelligent Machines and Robotics Planning
 Part IV: Intelligent Machines and Robotics Planning") Introduction to Information Science and Technology (IST) Part IV: Intelligent Machines and Robotics Planning Sören Schwertfeger / 师泽仁 ShanghaiTech University ShanghaiTech University - SIST - 10.05.2017
Introduction to Information Science and Technology (IST) Part IV: Intelligent Machines and Robotics Planning Sören Schwertfeger / 师泽仁 ShanghaiTech University ShanghaiTech University - SIST - 10.05.2017
Robotics Navigation I: Bug Algorithms
 Robotics Navigation I: Bug Algorithms Admin Any? Lab? Bug Algorithms Bug Algorithms Behavioral roboticists love(d) insects Simple behaviors easy to implement Complex emergent behaviors So first navigation
Robotics Navigation I: Bug Algorithms Admin Any? Lab? Bug Algorithms Bug Algorithms Behavioral roboticists love(d) insects Simple behaviors easy to implement Complex emergent behaviors So first navigation
Sung-Eui Yoon ( 윤성의 )
") Path Planning for Point Robots Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Motion planning framework Classic motion planning approaches 2 3 Configuration Space:
Path Planning for Point Robots Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Motion planning framework Classic motion planning approaches 2 3 Configuration Space:
Other Voronoi/Delaunay Structures
 Other Voronoi/Delaunay Structures Overview Alpha hulls (a subset of Delaunay graph) Extension of Voronoi Diagrams Convex Hull What is it good for? The bounding region of a point set Not so good for describing
Other Voronoi/Delaunay Structures Overview Alpha hulls (a subset of Delaunay graph) Extension of Voronoi Diagrams Convex Hull What is it good for? The bounding region of a point set Not so good for describing
EE631 Cooperating Autonomous Mobile Robots
 EE631 Cooperating Autonomous Mobile Robots Lecture 3: Path Planning Algorithm Prof. Yi Guo ECE Dept. Plan Representing the Space Path Planning Methods A* Search Algorithm D* Search Algorithm Representing
EE631 Cooperating Autonomous Mobile Robots Lecture 3: Path Planning Algorithm Prof. Yi Guo ECE Dept. Plan Representing the Space Path Planning Methods A* Search Algorithm D* Search Algorithm Representing
Motion Planning, Part III Graph Search, Part I. Howie Choset
 Motion Planning, Part III Graph Search, Part I Howie Choset Happy President s Day The Configuration Space What it is A set of reachable areas constructed from knowledge of both the robot and the world
Motion Planning, Part III Graph Search, Part I Howie Choset Happy President s Day The Configuration Space What it is A set of reachable areas constructed from knowledge of both the robot and the world
Spring 2010: Lecture 9. Ashutosh Saxena. Ashutosh Saxena
 CS 4758/6758: Robot Learning Spring 2010: Lecture 9 Why planning and control? Video Typical Architecture Planning 0.1 Hz Control 50 Hz Does it apply to all robots and all scenarios? Previous Lecture: Potential
CS 4758/6758: Robot Learning Spring 2010: Lecture 9 Why planning and control? Video Typical Architecture Planning 0.1 Hz Control 50 Hz Does it apply to all robots and all scenarios? Previous Lecture: Potential
Computational Geometry
 More on Voronoi diagrams 1 Can we move a disc from one location to another amidst obstacles? 2 Since the Voronoi diagram of point sites is locally furthest away from those sites, we can move the disc if
More on Voronoi diagrams 1 Can we move a disc from one location to another amidst obstacles? 2 Since the Voronoi diagram of point sites is locally furthest away from those sites, we can move the disc if
Geometric Path Planning McGill COMP 765 Oct 12 th, 2017
 Geometric Path Planning McGill COMP 765 Oct 12 th, 2017 The Motion Planning Problem Intuition: Find a safe path/trajectory from start to goal More precisely: A path is a series of robot configurations
Geometric Path Planning McGill COMP 765 Oct 12 th, 2017 The Motion Planning Problem Intuition: Find a safe path/trajectory from start to goal More precisely: A path is a series of robot configurations
CS Path Planning
 Why Path Planning? CS 603 - Path Planning Roderic A. Grupen 4/13/15 Robotics 1 4/13/15 Robotics 2 Why Motion Planning? Origins of Motion Planning Virtual Prototyping! Character Animation! Structural Molecular
Why Path Planning? CS 603 - Path Planning Roderic A. Grupen 4/13/15 Robotics 1 4/13/15 Robotics 2 Why Motion Planning? Origins of Motion Planning Virtual Prototyping! Character Animation! Structural Molecular
Robot Motion Control Matteo Matteucci
 Robot Motion Control Open loop control A mobile robot is meant to move from one place to another Pre-compute a smooth trajectory based on motion segments (e.g., line and circle segments) from start to
Robot Motion Control Open loop control A mobile robot is meant to move from one place to another Pre-compute a smooth trajectory based on motion segments (e.g., line and circle segments) from start to
Motion Planning. Jana Kosecka Department of Computer Science
 Motion Planning Jana Kosecka Department of Computer Science Discrete planning, graph search, shortest path, A* methods Road map methods Configuration space Slides thanks to http://cs.cmu.edu/~motionplanning,
Motion Planning Jana Kosecka Department of Computer Science Discrete planning, graph search, shortest path, A* methods Road map methods Configuration space Slides thanks to http://cs.cmu.edu/~motionplanning,
Robot Motion Planning
 Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
Advanced Robotics Path Planning & Navigation
 Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
6.141: Robotics systems and science Lecture 10: Implementing Motion Planning
 6.141: Robotics systems and science Lecture 10: Implementing Motion Planning Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2011 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
6.141: Robotics systems and science Lecture 10: Implementing Motion Planning Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2011 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
Path Planning for Point Robots. NUS CS 5247 David Hsu
 Path Planning for Point Robots NUS CS 5247 David Hsu Problem Input Robot represented as a point in the plane Obstacles represented as polygons Initial and goal positions Output A collision-free path between
Path Planning for Point Robots NUS CS 5247 David Hsu Problem Input Robot represented as a point in the plane Obstacles represented as polygons Initial and goal positions Output A collision-free path between
Robot Motion Planning
 Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
CS S Lecture February 13, 2017
 CS 6301.008.18S Lecture February 13, 2017 Main topics are #Voronoi-diagrams, #Fortune. Quick Note about Planar Point Location Last week, I started giving a difficult analysis of the planar point location
CS 6301.008.18S Lecture February 13, 2017 Main topics are #Voronoi-diagrams, #Fortune. Quick Note about Planar Point Location Last week, I started giving a difficult analysis of the planar point location
Lesson 1 Introduction to Path Planning Graph Searches: BFS and DFS
 Lesson 1 Introduction to Path Planning Graph Searches: BFS and DFS DASL Summer Program Path Planning References: http://robotics.mem.drexel.edu/mhsieh/courses/mem380i/index.html http://dasl.mem.drexel.edu/hing/bfsdfstutorial.htm
Lesson 1 Introduction to Path Planning Graph Searches: BFS and DFS DASL Summer Program Path Planning References: http://robotics.mem.drexel.edu/mhsieh/courses/mem380i/index.html http://dasl.mem.drexel.edu/hing/bfsdfstutorial.htm
Planar Graphs. 1 Graphs and maps. 1.1 Planarity and duality
 Planar Graphs In the first half of this book, we consider mostly planar graphs and their geometric representations, mostly in the plane. We start with a survey of basic results on planar graphs. This chapter
Planar Graphs In the first half of this book, we consider mostly planar graphs and their geometric representations, mostly in the plane. We start with a survey of basic results on planar graphs. This chapter
Manipula0on Algorithms Mo0on Planning. Mo#on Planning I. Katharina Muelling (NREC, Carnegie Mellon University) 1
 1") 16-843 Manipula0on Algorithms Mo0on Planning Mo#on Planning I Katharina Muelling (NREC, Carnegie Mellon University) 1 Configura0on Space Obstacles Star Algorithm Convex robot, transla#on C obs : convex
16-843 Manipula0on Algorithms Mo0on Planning Mo#on Planning I Katharina Muelling (NREC, Carnegie Mellon University) 1 Configura0on Space Obstacles Star Algorithm Convex robot, transla#on C obs : convex
MEV 442: Introduction to Robotics - Module 3 INTRODUCTION TO ROBOT PATH PLANNING
 MEV 442: Introduction to Robotics - Module 3 INTRODUCTION TO ROBOT PATH PLANNING THE PATH PLANNING PROBLEM The robot should find out a path enables the continuous motion of a robot from an initial configuration
MEV 442: Introduction to Robotics - Module 3 INTRODUCTION TO ROBOT PATH PLANNING THE PATH PLANNING PROBLEM The robot should find out a path enables the continuous motion of a robot from an initial configuration
Planning Techniques for Robotics Planning Representations: Skeletonization- and Grid-based Graphs
 16-350 Planning Techniques for Robotics Planning Representations: Skeletonization- and Grid-based Graphs Maxim Likhachev Robotics Institute 2D Planning for Omnidirectional Point Robot Planning for omnidirectional
16-350 Planning Techniques for Robotics Planning Representations: Skeletonization- and Grid-based Graphs Maxim Likhachev Robotics Institute 2D Planning for Omnidirectional Point Robot Planning for omnidirectional
Robotics Tasks. CS 188: Artificial Intelligence Spring Manipulator Robots. Mobile Robots. Degrees of Freedom. Sensors and Effectors
 CS 188: Artificial Intelligence Spring 2006 Lecture 5: Robot Motion Planning 1/31/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Motion planning (today) How to move from
CS 188: Artificial Intelligence Spring 2006 Lecture 5: Robot Motion Planning 1/31/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Motion planning (today) How to move from
Cognitive Robotics Robot Motion Planning Matteo Matteucci
 Cognitive Robotics Robot Motion Planning Robot Motion Planning eminently necessary since, by definition, a robot accomplishes tasks by moving in the real world. J.-C. Latombe (1991) Robot Motion Planning
Cognitive Robotics Robot Motion Planning Robot Motion Planning eminently necessary since, by definition, a robot accomplishes tasks by moving in the real world. J.-C. Latombe (1991) Robot Motion Planning
Volume Illumination and Segmentation
 Volume Illumination and Segmentation Computer Animation and Visualisation Lecture 13 Institute for Perception, Action & Behaviour School of Informatics Overview Volume illumination Segmentation Volume
Volume Illumination and Segmentation Computer Animation and Visualisation Lecture 13 Institute for Perception, Action & Behaviour School of Informatics Overview Volume illumination Segmentation Volume
6.141: Robotics systems and science Lecture 10: Motion Planning III
 6.141: Robotics systems and science Lecture 10: Motion Planning III Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2012 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
6.141: Robotics systems and science Lecture 10: Motion Planning III Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2012 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
Lecture 18: Voronoi Graphs and Distinctive States. Problem with Metrical Maps
 Lecture 18: Voronoi Graphs and Distinctive States CS 344R/393R: Robotics Benjamin Kuipers Problem with Metrical Maps Metrical maps are nice, but they don t scale. Storage requirements go up with the square
Lecture 18: Voronoi Graphs and Distinctive States CS 344R/393R: Robotics Benjamin Kuipers Problem with Metrical Maps Metrical maps are nice, but they don t scale. Storage requirements go up with the square
GRADE 6 PAT REVIEW. Math Vocabulary NAME:
 GRADE 6 PAT REVIEW Math Vocabulary NAME: Estimate Round Number Concepts An approximate or rough calculation, often based on rounding. Change a number to a more convenient value. (0 4: place value stays
GRADE 6 PAT REVIEW Math Vocabulary NAME: Estimate Round Number Concepts An approximate or rough calculation, often based on rounding. Change a number to a more convenient value. (0 4: place value stays
Configuration Space of a Robot
 Robot Path Planning Overview: 1. Visibility Graphs 2. Voronoi Graphs 3. Potential Fields 4. Sampling-Based Planners PRM: Probabilistic Roadmap Methods RRTs: Rapidly-exploring Random Trees Configuration
Robot Path Planning Overview: 1. Visibility Graphs 2. Voronoi Graphs 3. Potential Fields 4. Sampling-Based Planners PRM: Probabilistic Roadmap Methods RRTs: Rapidly-exploring Random Trees Configuration
Configuration Space. Ioannis Rekleitis
 Configuration Space Ioannis Rekleitis Configuration Space Configuration Space Definition A robot configuration is a specification of the positions of all robot points relative to a fixed coordinate system
Configuration Space Ioannis Rekleitis Configuration Space Configuration Space Definition A robot configuration is a specification of the positions of all robot points relative to a fixed coordinate system
Computational Geometry csci3250. Laura Toma. Bowdoin College
 Computational Geometry csci3250 Laura Toma Bowdoin College Motion Planning Input: a robot R and a set of obstacles S = {O 1, O 2, } start position p start end position p end Find a path from start to end
Computational Geometry csci3250 Laura Toma Bowdoin College Motion Planning Input: a robot R and a set of obstacles S = {O 1, O 2, } start position p start end position p end Find a path from start to end
Autonomous Robotics 6905
 6905 Lecture 5: to Path-Planning and Navigation Dalhousie University i October 7, 2011 1 Lecture Outline based on diagrams and lecture notes adapted from: Probabilistic bili i Robotics (Thrun, et. al.)
6905 Lecture 5: to Path-Planning and Navigation Dalhousie University i October 7, 2011 1 Lecture Outline based on diagrams and lecture notes adapted from: Probabilistic bili i Robotics (Thrun, et. al.)
Motion Planning. O Rourke, Chapter 8
 O Rourke, Chapter 8 Outline Translating a polygon Moving a ladder Shortest Path (Point-to-Point) Goal: Given disjoint polygons in the plane, and given positions s and t, find the shortest path from s to
O Rourke, Chapter 8 Outline Translating a polygon Moving a ladder Shortest Path (Point-to-Point) Goal: Given disjoint polygons in the plane, and given positions s and t, find the shortest path from s to
Last update: May 6, Robotics. CMSC 421: Chapter 25. CMSC 421: Chapter 25 1
 Last update: May 6, 2010 Robotics CMSC 421: Chapter 25 CMSC 421: Chapter 25 1 A machine to perform tasks What is a robot? Some level of autonomy and flexibility, in some type of environment Sensory-motor
Last update: May 6, 2010 Robotics CMSC 421: Chapter 25 CMSC 421: Chapter 25 1 A machine to perform tasks What is a robot? Some level of autonomy and flexibility, in some type of environment Sensory-motor
Correctness. The Powercrust Algorithm for Surface Reconstruction. Correctness. Correctness. Delaunay Triangulation. Tools - Voronoi Diagram
 Correctness The Powercrust Algorithm for Surface Reconstruction Nina Amenta Sunghee Choi Ravi Kolluri University of Texas at Austin Boundary of a solid Close to original surface Homeomorphic to original
Correctness The Powercrust Algorithm for Surface Reconstruction Nina Amenta Sunghee Choi Ravi Kolluri University of Texas at Austin Boundary of a solid Close to original surface Homeomorphic to original
Local Search Methods. CS 188: Artificial Intelligence Fall Announcements. Hill Climbing. Hill Climbing Diagram. Today
 CS 188: Artificial Intelligence Fall 2006 Lecture 5: Robot Motion Planning 9/14/2006 Local Search Methods Queue-based algorithms keep fallback options (backtracking) Local search: improve what you have
CS 188: Artificial Intelligence Fall 2006 Lecture 5: Robot Motion Planning 9/14/2006 Local Search Methods Queue-based algorithms keep fallback options (backtracking) Local search: improve what you have
Divided-and-Conquer for Voronoi Diagrams Revisited. Supervisor: Ben Galehouse Presenter: Xiaoqi Cao
 Divided-and-Conquer for Voronoi Diagrams Revisited Supervisor: Ben Galehouse Presenter: Xiaoqi Cao Outline Introduction Generalized Voronoi Diagram Algorithm for building generalized Voronoi Diagram Applications
Divided-and-Conquer for Voronoi Diagrams Revisited Supervisor: Ben Galehouse Presenter: Xiaoqi Cao Outline Introduction Generalized Voronoi Diagram Algorithm for building generalized Voronoi Diagram Applications
Probabilistic Methods for Kinodynamic Path Planning
 16.412/6.834J Cognitive Robotics February 7 th, 2005 Probabilistic Methods for Kinodynamic Path Planning Based on Past Student Lectures by: Paul Elliott, Aisha Walcott, Nathan Ickes and Stanislav Funiak
16.412/6.834J Cognitive Robotics February 7 th, 2005 Probabilistic Methods for Kinodynamic Path Planning Based on Past Student Lectures by: Paul Elliott, Aisha Walcott, Nathan Ickes and Stanislav Funiak
CMU-Q Lecture 4: Path Planning. Teacher: Gianni A. Di Caro
 CMU-Q 15-381 Lecture 4: Path Planning Teacher: Gianni A. Di Caro APPLICATION: MOTION PLANNING Path planning: computing a continuous sequence ( a path ) of configurations (states) between an initial configuration
CMU-Q 15-381 Lecture 4: Path Planning Teacher: Gianni A. Di Caro APPLICATION: MOTION PLANNING Path planning: computing a continuous sequence ( a path ) of configurations (states) between an initial configuration
CIS 390 Fall 2015 Robotics: Planning and Perception Kostas Daniilidis Homework 6
 CIS 390 Fall 2015 Robotics: Planning and Perception Kostas Daniilidis Homework 6 Lab session: Thursday October 27, 2016 10:30 AM, 2016 Code submission: Friday October 28, 2016 23:59 PM 1 Introduction In
CIS 390 Fall 2015 Robotics: Planning and Perception Kostas Daniilidis Homework 6 Lab session: Thursday October 27, 2016 10:30 AM, 2016 Code submission: Friday October 28, 2016 23:59 PM 1 Introduction In
Planning in Mobile Robotics
 Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
Advanced Robotics Path Planning & Navigation
 Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Computational Geometry
 Lecture 12: Lecture 12: Motivation: Terrains by interpolation To build a model of the terrain surface, we can start with a number of sample points where we know the height. Lecture 12: Motivation: Terrains
Lecture 12: Lecture 12: Motivation: Terrains by interpolation To build a model of the terrain surface, we can start with a number of sample points where we know the height. Lecture 12: Motivation: Terrains
Coverage and Search Algorithms. Chapter 10
 Coverage and Search Algorithms Chapter 10 Objectives To investigate some simple algorithms for covering the area in an environment To understand how to break down an environment into simple convex pieces
Coverage and Search Algorithms Chapter 10 Objectives To investigate some simple algorithms for covering the area in an environment To understand how to break down an environment into simple convex pieces
Robotic Motion Planning: Review C-Space and Start Potential Functions
 Robotic Motion Planning: Review C-Space and Start Potential Functions Robotics Institute 16-735 http://www.cs.cmu.edu/~motionplanning Howie Choset http://www.cs.cmu.edu/~choset What if the robot is not
Robotic Motion Planning: Review C-Space and Start Potential Functions Robotics Institute 16-735 http://www.cs.cmu.edu/~motionplanning Howie Choset http://www.cs.cmu.edu/~choset What if the robot is not
CoE4TN4 Image Processing
 CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
Goal-Directed Navigation
 Goal-Directed Navigation Chapter 6 Objectives Investigate techniques for navigating a robot towards a goal location Examine algorithms that work in environments with known obstacle locations unknown obstacle
Goal-Directed Navigation Chapter 6 Objectives Investigate techniques for navigating a robot towards a goal location Examine algorithms that work in environments with known obstacle locations unknown obstacle
Springer-Vcrlag New York Inc.
 S Algorithmica (1987) 2: 403-430 ~lgorithmica @ 1987 Springer-Vcrlag New York Inc. Path-Planning Strategies for a Point Mobile Automaton Moving Amidst Unknown Obstacles of Arbitrary Shape1 Vladimir J.
S Algorithmica (1987) 2: 403-430 ~lgorithmica @ 1987 Springer-Vcrlag New York Inc. Path-Planning Strategies for a Point Mobile Automaton Moving Amidst Unknown Obstacles of Arbitrary Shape1 Vladimir J.
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning
 Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Geometric Computations for Simulation
 1 Geometric Computations for Simulation David E. Johnson I. INTRODUCTION A static virtual world would be boring and unlikely to draw in a user enough to create a sense of immersion. Simulation allows things
1 Geometric Computations for Simulation David E. Johnson I. INTRODUCTION A static virtual world would be boring and unlikely to draw in a user enough to create a sense of immersion. Simulation allows things
COMPLETE AND SCALABLE MULTI-ROBOT PLANNING IN TUNNEL ENVIRONMENTS. Mike Peasgood John McPhee Christopher Clark
 COMPLETE AND SCALABLE MULTI-ROBOT PLANNING IN TUNNEL ENVIRONMENTS Mike Peasgood John McPhee Christopher Clark Lab for Intelligent and Autonomous Robotics, Department of Mechanical Engineering, University
COMPLETE AND SCALABLE MULTI-ROBOT PLANNING IN TUNNEL ENVIRONMENTS Mike Peasgood John McPhee Christopher Clark Lab for Intelligent and Autonomous Robotics, Department of Mechanical Engineering, University
Robotics. Chapter 25. Chapter 25 1
 Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration of robot
Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration of robot
Lecture Schedule Week Date Lecture (W: 3:05p-4:50, 7-222)
") 2017 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (W: 3:05p-4:50, 7-222) 1 26-Jul Introduction + 2 2-Aug Representing Position
2017 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (W: 3:05p-4:50, 7-222) 1 26-Jul Introduction + 2 2-Aug Representing Position
DiFi: Distance Fields - Fast Computation Using Graphics Hardware
 DiFi: Distance Fields - Fast Computation Using Graphics Hardware Avneesh Sud Dinesh Manocha UNC-Chapel Hill http://gamma.cs.unc.edu/difi Distance Fields Distance Function For a site a scalar function f:r
DiFi: Distance Fields - Fast Computation Using Graphics Hardware Avneesh Sud Dinesh Manocha UNC-Chapel Hill http://gamma.cs.unc.edu/difi Distance Fields Distance Function For a site a scalar function f:r
Motion Planning for a Whole-Sensitive Robot Arm Manipulator*
 I \ "'/\ ~ I I r I L, (/1 Motion Planning for a Whole-Sensitive Robot Arm Manipulator* Edward Cheung and Vladimir Lumelsky Yale University, Department of Electrical Engineering New Haven, Connecticut 06520
I \ "'/\ ~ I I r I L, (/1 Motion Planning for a Whole-Sensitive Robot Arm Manipulator* Edward Cheung and Vladimir Lumelsky Yale University, Department of Electrical Engineering New Haven, Connecticut 06520
Announcements. CS 188: Artificial Intelligence Fall Robot motion planning! Today. Robotics Tasks. Mobile Robots
 CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Announcements Project 1 due (yesterday)! Project 2 (Pacman with ghosts) up in a few days Reminder: you are allowed to
CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Announcements Project 1 due (yesterday)! Project 2 (Pacman with ghosts) up in a few days Reminder: you are allowed to
CS 188: Artificial Intelligence Fall Announcements
 CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Dan Klein UC Berkeley Many slides over the course adapted from either Stuart Russell or Andrew Moore Announcements Project
CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Dan Klein UC Berkeley Many slides over the course adapted from either Stuart Russell or Andrew Moore Announcements Project
Navigation methods and systems
 Navigation methods and systems Navigare necesse est Content: Navigation of mobile robots a short overview Maps Motion Planning SLAM (Simultaneous Localization and Mapping) Navigation of mobile robots a
Navigation methods and systems Navigare necesse est Content: Navigation of mobile robots a short overview Maps Motion Planning SLAM (Simultaneous Localization and Mapping) Navigation of mobile robots a
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Motion Planning 1 Retraction and Cell Decomposition
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Motion Planning 1 Retraction and Cell Decomposition motivation robots are expected to perform tasks in workspaces populated by obstacles autonomy requires
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Motion Planning 1 Retraction and Cell Decomposition motivation robots are expected to perform tasks in workspaces populated by obstacles autonomy requires
Roadmap-Based Path Planning
 Roadmap-Based d Path Planning Chapter 7 Objectives Understand the definition of a Road Map Investigate techniques for roadmap-based goal- directed path planning in 2D environments geometry-based algorithms
Roadmap-Based d Path Planning Chapter 7 Objectives Understand the definition of a Road Map Investigate techniques for roadmap-based goal- directed path planning in 2D environments geometry-based algorithms
Robot Motion Planning and (a little) Computational Geometry
 Computational Geometry") Images taken from slides b B. Baazit, G. Dudek, J. C. Latombe and A. Moore Robot Motion Planning and (a little) Computational Geometr Topics: Transforms Topological Methods Configuration space Skeletonization
Images taken from slides b B. Baazit, G. Dudek, J. C. Latombe and A. Moore Robot Motion Planning and (a little) Computational Geometr Topics: Transforms Topological Methods Configuration space Skeletonization
Lecture 3: Motion Planning 2
 CS 294-115 Algorithmic Human-Robot Interaction Fall 2017 Lecture 3: Motion Planning 2 Scribes: David Chan and Liting Sun - Adapted from F2016 Notes by Molly Nicholas and Chelsea Zhang 3.1 Previously Recall
CS 294-115 Algorithmic Human-Robot Interaction Fall 2017 Lecture 3: Motion Planning 2 Scribes: David Chan and Liting Sun - Adapted from F2016 Notes by Molly Nicholas and Chelsea Zhang 3.1 Previously Recall
On Merging Straight Skeletons
 On Merging Straight Skeletons Franz Aurenhammer 1 and Michael Steinkogler 2 1 Institute for Theoretical Computer Science, University of Technology, Graz, Austria auren@igi.tugraz.at 2 Institute for Theoretical
On Merging Straight Skeletons Franz Aurenhammer 1 and Michael Steinkogler 2 1 Institute for Theoretical Computer Science, University of Technology, Graz, Austria auren@igi.tugraz.at 2 Institute for Theoretical
CS4733 Class Notes. 1 2-D Robot Motion Planning Algorithm Using Grown Obstacles
 CS4733 Class Notes 1 2-D Robot Motion Planning Algorithm Using Grown Obstacles Reference: An Algorithm for Planning Collision Free Paths Among Poyhedral Obstacles by T. Lozano-Perez and M. Wesley. This
CS4733 Class Notes 1 2-D Robot Motion Planning Algorithm Using Grown Obstacles Reference: An Algorithm for Planning Collision Free Paths Among Poyhedral Obstacles by T. Lozano-Perez and M. Wesley. This
Final Exam Practice Fall Semester, 2012
 COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning
 Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Kurt Mehlhorn, MPI für Informatik. Curve and Surface Reconstruction p.1/25
 Curve and Surface Reconstruction Kurt Mehlhorn MPI für Informatik Curve and Surface Reconstruction p.1/25 Curve Reconstruction: An Example probably, you see more than a set of points Curve and Surface
Curve and Surface Reconstruction Kurt Mehlhorn MPI für Informatik Curve and Surface Reconstruction p.1/25 Curve Reconstruction: An Example probably, you see more than a set of points Curve and Surface
Distance-Optimal Navigation in an Unknown Environment without Sensing Distances
 SUBMITTED TO IEEE TRANSACTIONS ON ROBOTICS 1 Distance-Optimal Navigation in an Unknown Environment without Sensing Distances Benjamín Tovar, Rafael Murrieta-Cid, and Steven M. LaValle Abstract This paper
SUBMITTED TO IEEE TRANSACTIONS ON ROBOTICS 1 Distance-Optimal Navigation in an Unknown Environment without Sensing Distances Benjamín Tovar, Rafael Murrieta-Cid, and Steven M. LaValle Abstract This paper
Geometric Modeling in Graphics
 Geometric Modeling in Graphics Part 2: Meshes properties Martin Samuelčík www.sccg.sk/~samuelcik samuelcik@sccg.sk Meshes properties Working with DCEL representation One connected component with simple
Geometric Modeling in Graphics Part 2: Meshes properties Martin Samuelčík www.sccg.sk/~samuelcik samuelcik@sccg.sk Meshes properties Working with DCEL representation One connected component with simple
Topological Navigation and Path Planning
 Topological Navigation and Path Planning Topological Navigation and Path Planning Based upon points of interest E.g., landmarks Navigation is relational between points of interest E.g., Go past the corner
Topological Navigation and Path Planning Topological Navigation and Path Planning Based upon points of interest E.g., landmarks Navigation is relational between points of interest E.g., Go past the corner
Week 8 Voronoi Diagrams
 1 Week 8 Voronoi Diagrams 2 Voronoi Diagram Very important problem in Comp. Geo. Discussed back in 1850 by Dirichlet Published in a paper by Voronoi in 1908 3 Voronoi Diagram Fire observation towers: an
1 Week 8 Voronoi Diagrams 2 Voronoi Diagram Very important problem in Comp. Geo. Discussed back in 1850 by Dirichlet Published in a paper by Voronoi in 1908 3 Voronoi Diagram Fire observation towers: an
Vectorization Using Stochastic Local Search
 Vectorization Using Stochastic Local Search Byron Knoll CPSC303, University of British Columbia March 29, 2009 Abstract: Stochastic local search can be used for the process of vectorization. In this project,
Vectorization Using Stochastic Local Search Byron Knoll CPSC303, University of British Columbia March 29, 2009 Abstract: Stochastic local search can be used for the process of vectorization. In this project,
Dynamic Robot Path Planning Using Improved Max-Min Ant Colony Optimization
 Proceedings of the International Conference of Control, Dynamic Systems, and Robotics Ottawa, Ontario, Canada, May 15-16 2014 Paper No. 49 Dynamic Robot Path Planning Using Improved Max-Min Ant Colony
Proceedings of the International Conference of Control, Dynamic Systems, and Robotics Ottawa, Ontario, Canada, May 15-16 2014 Paper No. 49 Dynamic Robot Path Planning Using Improved Max-Min Ant Colony
Motion Planning 2D. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Motion Planning 2D Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Tratto dai corsi: CS 326A: Motion Planning ai.stanford.edu/~latombe/cs326/2007/index.htm Prof. J.C. Latombe Stanford
Motion Planning 2D Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Tratto dai corsi: CS 326A: Motion Planning ai.stanford.edu/~latombe/cs326/2007/index.htm Prof. J.C. Latombe Stanford
CS 532: 3D Computer Vision 14 th Set of Notes
 1 CS 532: 3D Computer Vision 14 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Triangulating
1 CS 532: 3D Computer Vision 14 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Triangulating
EECS490: Digital Image Processing. Lecture #23
 Lecture #23 Motion segmentation & motion tracking Boundary tracking Chain codes Minimum perimeter polygons Signatures Motion Segmentation P k Accumulative Difference Image Positive ADI Negative ADI (ADI)
Lecture #23 Motion segmentation & motion tracking Boundary tracking Chain codes Minimum perimeter polygons Signatures Motion Segmentation P k Accumulative Difference Image Positive ADI Negative ADI (ADI)
Tutorial 3 Comparing Biological Shapes Patrice Koehl and Joel Hass
 Tutorial 3 Comparing Biological Shapes Patrice Koehl and Joel Hass University of California, Davis, USA http://www.cs.ucdavis.edu/~koehl/ims2017/ What is a shape? A shape is a 2-manifold with a Riemannian
Tutorial 3 Comparing Biological Shapes Patrice Koehl and Joel Hass University of California, Davis, USA http://www.cs.ucdavis.edu/~koehl/ims2017/ What is a shape? A shape is a 2-manifold with a Riemannian
Path Planning. Jacky Baltes Dept. of Computer Science University of Manitoba 11/21/10
 Path Planning Jacky Baltes Autonomous Agents Lab Department of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky Path Planning Jacky Baltes Dept. of
Path Planning Jacky Baltes Autonomous Agents Lab Department of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky Path Planning Jacky Baltes Dept. of