Segway RMP Experiments at Georgia Tech
|
|
|
- Mitchell Barber
- 6 years ago
- Views:
Transcription
1 Segway RMP Experiments at Georgia Tech DARPA MARS Segway Workshop September 23, 2003 Tom Collins


2 Major activities Interface to MissionLab Teleoperation experiments Use of laser range finder for terrain characterization

")

3 Physical modifications Basic operation requires mounting of only two components Ruggedized case containing laptop, power converters, , camera, and video encoder (on top plate, 4 bolts) Battery (on base, in custom bracket) SICK mount for laser experiments Optional protective kill switches (slight modification of UMass design)
4 Software and Interface Uses Kvaser LapCAN card for RMP interface RMP drivers run as part of HServer application HServer provides a uniform interface across various robot platforms and sensors RMP updates acquired at about 50 Hz MissionLab generates executable code for RMP like any other supported robot Interface to SICK and encoded video stream unchanged from our other platforms


5 Initial experiments Work stalled by bailment agreement Interface completed in lab during late July, with little actual robot usage Video shows first significant run teleoperation at Ft. Benning
6 Lessons learned Only one unexplained instance of dying (in lab, very early in testing) Virtually no tipping until we started trying Vulnerable to tipping during sudden acceleration in loose soil or gravel Hill climbing capabilities limited Battery power is impressive for vehicle size Speed, turning radius better than other outdoor robots

7 Ft. Benning runs- MOUT

8 Ft. Benning run -- Sewer

9 Ft. Benning runs Leader/Follower

10 Ft. Benning runs Stress testing
11 Terrain characterization Laser rangefinders have been used extensively on robots On or near the ground : Road following Footfall selection Vegetation characterization Localization and/or visualization RMP is at least as vulnerable to discontinuities as a legged robot RMP has a free tilt mechanism Seems worthwhile to revisit the terrain issue with the RMP in mind
12 Geometry of a SICK on the RMP First consider ONLY the reading taken directly ahead (azimuth = 0) Let (x 0, y 0, z 0 ) be the sensed point on the ground in egocentric coordinates Angles, distances be defined as in figure Then x y z = 0 = l sin( ρ) d cos( ρ) + r = w + l cos( ρ) d sin( ρ) r 0 cos( α + ρ) 0 sin( α + ρ)
13 RMP pitch behavior Data taken directly from RMP pitch sensor Shows the tip needed to move across fairly level ground Average Tilt Initiates motion Stops
14 Closer look at pitch Gross control operates at ~0.15 Hz varying with payload, etc. Maintains speed? Fine control operates at about 1 Hz Hopefully, all of these effects can be made to disappear in range readings
15 Raw laser range readings Still considering only the single reading straight ahead (and tilted down) Data taken during same maneuver as previous pitch data During the active movement phase Note the appearance of same frequencies More apparent when scaled sin(pitch) is superimposed (inset)
16 Corrected laser range readings Apply the correction for z 0 Plotted along with raw range data for comparison Since this was fairly level ground, the plot should stay near zero It actually approximates?z relative to z at wheel Deviation from zero mostly due to minor slopes z = w + l cos( ρ ) d sin( ρ) r0 sin( α + 0 ρ )

17 Check for latency issues Pitch and range are acquired from different devices Timestamps are applied at the computer running hserver Latency characteristics of RMP are unknown So, some highfrequency errors may be due to picking the wrong pitch data Graph shows that the best choice of pitch data is the most recent at the time of laser scan completion



18 3D terrain Use data for all azimuths, not just straight ahead Calculate x and y for every point

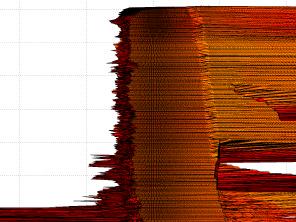
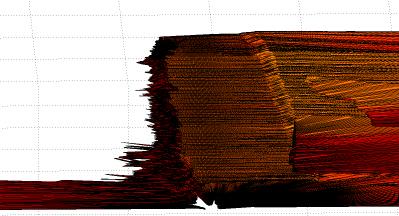
19 Terrain and obstacles
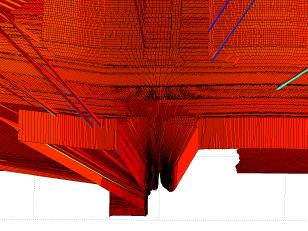
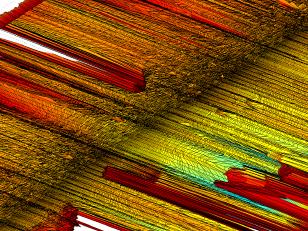
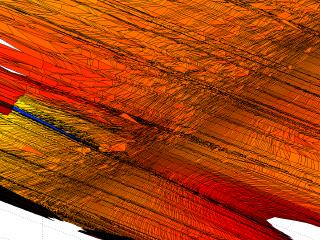
20 More visualizations
21 How this data can be used Autonomous operation Reactive sensing of terrain considerations (perceptual schemas) Without even attempting to register data in a larger world map, it provides Local positive and negative obstacles smaller than wheel width Sideslope of path ahead (RMP is vulnerable to side tipping) Fore/aft slope All of these features can be expressed as simple avoidance vectors Teleoperation Visualization of terrain (can be displayed alongside visual image) Could be processed to produce simple operator cues (possibly generated by same perceptual schemas above) Low-light operation
22 Future work Full autonomous operation Multiagent experiments Heterogeneous with existing GT robots Homogeneous with MARS 2020 team Use SICK intensity information to display surface brightness (in IR) Estimation of surface material (sand, gravel, other difficult surfaces)
Vehicle Localization. Hannah Rae Kerner 21 April 2015
 Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
ME 597/747 Autonomous Mobile Robots. Mid Term Exam. Duration: 2 hour Total Marks: 100
 ME 597/747 Autonomous Mobile Robots Mid Term Exam Duration: 2 hour Total Marks: 100 Instructions: Read the exam carefully before starting. Equations are at the back, but they are NOT necessarily valid
ME 597/747 Autonomous Mobile Robots Mid Term Exam Duration: 2 hour Total Marks: 100 Instructions: Read the exam carefully before starting. Equations are at the back, but they are NOT necessarily valid
Robotics Project. Final Report. Computer Science University of Minnesota. December 17, 2007
 Robotics Project Final Report Computer Science 5551 University of Minnesota December 17, 2007 Peter Bailey, Matt Beckler, Thomas Bishop, and John Saxton Abstract: A solution of the parallel-parking problem
Robotics Project Final Report Computer Science 5551 University of Minnesota December 17, 2007 Peter Bailey, Matt Beckler, Thomas Bishop, and John Saxton Abstract: A solution of the parallel-parking problem
Calibration of a rotating multi-beam Lidar
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Calibration of a rotating multi-beam Lidar Naveed Muhammad 1,2 and Simon Lacroix 1,2 Abstract
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Calibration of a rotating multi-beam Lidar Naveed Muhammad 1,2 and Simon Lacroix 1,2 Abstract
EE631 Cooperating Autonomous Mobile Robots
 EE631 Cooperating Autonomous Mobile Robots Lecture: Multi-Robot Motion Planning Prof. Yi Guo ECE Department Plan Introduction Premises and Problem Statement A Multi-Robot Motion Planning Algorithm Implementation
EE631 Cooperating Autonomous Mobile Robots Lecture: Multi-Robot Motion Planning Prof. Yi Guo ECE Department Plan Introduction Premises and Problem Statement A Multi-Robot Motion Planning Algorithm Implementation
Build and Test Plan: IGV Team
 Build and Test Plan: IGV Team 2/6/2008 William Burke Donaldson Diego Gonzales David Mustain Ray Laser Range Finder Week 3 Jan 29 The laser range finder will be set-up in the lab and connected to the computer
Build and Test Plan: IGV Team 2/6/2008 William Burke Donaldson Diego Gonzales David Mustain Ray Laser Range Finder Week 3 Jan 29 The laser range finder will be set-up in the lab and connected to the computer
Recycling Robotics Garbage collecting Robot Application - Project Work Definitions and Design
 Recycling Robotics Garbage collecting Robot Application - Project Work Definitions and Design Jari Saarinen 10. Sep. 2010 Table of Contents Recycling Robotics Garbage collecting Robot Application - Project
Recycling Robotics Garbage collecting Robot Application - Project Work Definitions and Design Jari Saarinen 10. Sep. 2010 Table of Contents Recycling Robotics Garbage collecting Robot Application - Project
Exam in DD2426 Robotics and Autonomous Systems
 Exam in DD2426 Robotics and Autonomous Systems Lecturer: Patric Jensfelt KTH, March 16, 2010, 9-12 No aids are allowed on the exam, i.e. no notes, no books, no calculators, etc. You need a minimum of 20
Exam in DD2426 Robotics and Autonomous Systems Lecturer: Patric Jensfelt KTH, March 16, 2010, 9-12 No aids are allowed on the exam, i.e. no notes, no books, no calculators, etc. You need a minimum of 20
CANAL FOLLOWING USING AR DRONE IN SIMULATION
 CANAL FOLLOWING USING AR DRONE IN SIMULATION ENVIRONMENT Ali Ahmad, Ahmad Aneeque Khalid Department of Electrical Engineering SBA School of Science & Engineering, LUMS, Pakistan {14060006, 14060019}@lums.edu.pk
CANAL FOLLOWING USING AR DRONE IN SIMULATION ENVIRONMENT Ali Ahmad, Ahmad Aneeque Khalid Department of Electrical Engineering SBA School of Science & Engineering, LUMS, Pakistan {14060006, 14060019}@lums.edu.pk
Pedestrian Detection Using Correlated Lidar and Image Data EECS442 Final Project Fall 2016
 edestrian Detection Using Correlated Lidar and Image Data EECS442 Final roject Fall 2016 Samuel Rohrer University of Michigan rohrer@umich.edu Ian Lin University of Michigan tiannis@umich.edu Abstract
edestrian Detection Using Correlated Lidar and Image Data EECS442 Final roject Fall 2016 Samuel Rohrer University of Michigan rohrer@umich.edu Ian Lin University of Michigan tiannis@umich.edu Abstract
THE ML/MD SYSTEM .'*.,
 INTRODUCTION A vehicle intended for use on the planet Mars, and therefore capable of autonomous operation over very rough terrain, has been under development at Rensselaer Polytechnic Institute since 1967.
INTRODUCTION A vehicle intended for use on the planet Mars, and therefore capable of autonomous operation over very rough terrain, has been under development at Rensselaer Polytechnic Institute since 1967.
EE565:Mobile Robotics Lecture 3
 EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
Real-time Cooperative Behavior for Tactical Mobile Robot Teams. April 2000 Ronald C. Arkin and Thomas R. Collins Georgia Tech
 Real-time Cooperative Behavior for Tactical Mobile Robot Teams April 2000 Ronald C. Arkin and Thomas R. Collins Georgia Tech Usability studies Overview test scenarios procedures and plans Real-Time Advisor
Real-time Cooperative Behavior for Tactical Mobile Robot Teams April 2000 Ronald C. Arkin and Thomas R. Collins Georgia Tech Usability studies Overview test scenarios procedures and plans Real-Time Advisor
Intelligent Outdoor Navigation of a Mobile Robot Platform Using a Low Cost High Precision RTK-GPS and Obstacle Avoidance System
 Intelligent Outdoor Navigation of a Mobile Robot Platform Using a Low Cost High Precision RTK-GPS and Obstacle Avoidance System Under supervision of: Prof. Dr. -Ing. Klaus-Dieter Kuhnert Dipl.-Inform.
Intelligent Outdoor Navigation of a Mobile Robot Platform Using a Low Cost High Precision RTK-GPS and Obstacle Avoidance System Under supervision of: Prof. Dr. -Ing. Klaus-Dieter Kuhnert Dipl.-Inform.
3D Terrain Sensing System using Laser Range Finder with Arm-Type Movable Unit
 3D Terrain Sensing System using Laser Range Finder with Arm-Type Movable Unit 9 Toyomi Fujita and Yuya Kondo Tohoku Institute of Technology Japan 1. Introduction A 3D configuration and terrain sensing
3D Terrain Sensing System using Laser Range Finder with Arm-Type Movable Unit 9 Toyomi Fujita and Yuya Kondo Tohoku Institute of Technology Japan 1. Introduction A 3D configuration and terrain sensing
LAUROPE Six Legged Walking Robot for Planetary Exploration participating in the SpaceBot Cup
 FZI RESEARCH CENTER FOR INFORMATION TECHNOLOGY LAUROPE Six Legged Walking Robot for Planetary Exploration participating in the SpaceBot Cup ASTRA 2015, ESA/ESTEC, Noordwijk 12. Mai 2015 Outline SpaceBot
FZI RESEARCH CENTER FOR INFORMATION TECHNOLOGY LAUROPE Six Legged Walking Robot for Planetary Exploration participating in the SpaceBot Cup ASTRA 2015, ESA/ESTEC, Noordwijk 12. Mai 2015 Outline SpaceBot
A Repository Of Sensor Data For Autonomous Driving Research
 A Repository Of Sensor Data For Autonomous Driving Research Michael Shneier, Tommy Chang, Tsai Hong, Gerry Cheok, Harry Scott, Steve Legowik, Alan Lytle National Institute of Standards and Technology 100
A Repository Of Sensor Data For Autonomous Driving Research Michael Shneier, Tommy Chang, Tsai Hong, Gerry Cheok, Harry Scott, Steve Legowik, Alan Lytle National Institute of Standards and Technology 100
Lidar Sensors, Today & Tomorrow. Christian Sevcik RIEGL Laser Measurement Systems
 Lidar Sensors, Today & Tomorrow Christian Sevcik RIEGL Laser Measurement Systems o o o o Online Waveform technology Stand alone operation no field computer required Remote control through wireless network
Lidar Sensors, Today & Tomorrow Christian Sevcik RIEGL Laser Measurement Systems o o o o Online Waveform technology Stand alone operation no field computer required Remote control through wireless network
CACIC Documentation. Release Gabriel F P Araujo
 CACIC Documentation Release 1.0.0 Gabriel F P Araujo March 12, 2017 Hardware 1 Who am I? 1 1.1 Camera.................................................. 2 1.2 Laser...................................................
CACIC Documentation Release 1.0.0 Gabriel F P Araujo March 12, 2017 Hardware 1 Who am I? 1 1.1 Camera.................................................. 2 1.2 Laser...................................................
Terrain Roughness Identification for High-Speed UGVs
 Proceedings of the International Conference of Control, Dynamic Systems, and Robotics Ottawa, Ontario, Canada, May 15-16 2014 Paper No. 11 Terrain Roughness Identification for High-Speed UGVs Graeme N.
Proceedings of the International Conference of Control, Dynamic Systems, and Robotics Ottawa, Ontario, Canada, May 15-16 2014 Paper No. 11 Terrain Roughness Identification for High-Speed UGVs Graeme N.
3D Simultaneous Localization and Mapping and Navigation Planning for Mobile Robots in Complex Environments
 3D Simultaneous Localization and Mapping and Navigation Planning for Mobile Robots in Complex Environments Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems
3D Simultaneous Localization and Mapping and Navigation Planning for Mobile Robots in Complex Environments Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems
Sensor technology for mobile robots
 Laser application, vision application, sonar application and sensor fusion (6wasserf@informatik.uni-hamburg.de) Outline Introduction Mobile robots perception Definitions Sensor classification Sensor Performance
Laser application, vision application, sonar application and sensor fusion (6wasserf@informatik.uni-hamburg.de) Outline Introduction Mobile robots perception Definitions Sensor classification Sensor Performance
ACE Project Report. December 10, Reid Simmons, Sanjiv Singh Robotics Institute Carnegie Mellon University
 ACE Project Report December 10, 2007 Reid Simmons, Sanjiv Singh Robotics Institute Carnegie Mellon University 1. Introduction This report covers the period from September 20, 2007 through December 10,
ACE Project Report December 10, 2007 Reid Simmons, Sanjiv Singh Robotics Institute Carnegie Mellon University 1. Introduction This report covers the period from September 20, 2007 through December 10,
Unmanned Vehicle Technology Researches for Outdoor Environments. *Ju-Jang Lee 1)
") Keynote Paper Unmanned Vehicle Technology Researches for Outdoor Environments *Ju-Jang Lee 1) 1) Department of Electrical Engineering, KAIST, Daejeon 305-701, Korea 1) jjlee@ee.kaist.ac.kr ABSTRACT The
Keynote Paper Unmanned Vehicle Technology Researches for Outdoor Environments *Ju-Jang Lee 1) 1) Department of Electrical Engineering, KAIST, Daejeon 305-701, Korea 1) jjlee@ee.kaist.ac.kr ABSTRACT The
CS283: Robotics Fall 2016: Sensors
 CS283: Robotics Fall 2016: Sensors Sören Schwertfeger / 师泽仁 ShanghaiTech University Robotics ShanghaiTech University - SIST - 23.09.2016 2 REVIEW TRANSFORMS Robotics ShanghaiTech University - SIST - 23.09.2016
CS283: Robotics Fall 2016: Sensors Sören Schwertfeger / 师泽仁 ShanghaiTech University Robotics ShanghaiTech University - SIST - 23.09.2016 2 REVIEW TRANSFORMS Robotics ShanghaiTech University - SIST - 23.09.2016
3D Laser Range Finder Topological sensor gathering spatial data from the surrounding environment
 Initial Project and Group Identification Document September 19, 2013 3D Laser Range Finder Topological sensor gathering spatial data from the surrounding environment Christian Conrose Jonathan Ulrich Andrew
Initial Project and Group Identification Document September 19, 2013 3D Laser Range Finder Topological sensor gathering spatial data from the surrounding environment Christian Conrose Jonathan Ulrich Andrew
Dynamic Sensor-based Path Planning and Hostile Target Detection with Mobile Ground Robots. Matt Epperson Dr. Timothy Chung
 Dynamic Sensor-based Path Planning and Hostile Target Detection with Mobile Ground Robots Matt Epperson Dr. Timothy Chung Brief Bio Matt Epperson Cal Poly, San Luis Obispo Sophmore Computer Engineer NREIP
Dynamic Sensor-based Path Planning and Hostile Target Detection with Mobile Ground Robots Matt Epperson Dr. Timothy Chung Brief Bio Matt Epperson Cal Poly, San Luis Obispo Sophmore Computer Engineer NREIP
Jo-Car2 Autonomous Mode. Path Planning (Cost Matrix Algorithm)
") Chapter 8.2 Jo-Car2 Autonomous Mode Path Planning (Cost Matrix Algorithm) Introduction: In order to achieve its mission and reach the GPS goal safely; without crashing into obstacles or leaving the lane,
Chapter 8.2 Jo-Car2 Autonomous Mode Path Planning (Cost Matrix Algorithm) Introduction: In order to achieve its mission and reach the GPS goal safely; without crashing into obstacles or leaving the lane,
Sphero Lightning Lab Cheat Sheet
 Actions Tool Description Variables Ranges Roll Combines heading, speed and time variables to make the robot roll. Duration Speed Heading (0 to 999999 seconds) (degrees 0-359) Set Speed Sets the speed of
Actions Tool Description Variables Ranges Roll Combines heading, speed and time variables to make the robot roll. Duration Speed Heading (0 to 999999 seconds) (degrees 0-359) Set Speed Sets the speed of
GBT Commissioning Memo 11: Plate Scale and pointing effects of subreflector positioning at 2 GHz.
 GBT Commissioning Memo 11: Plate Scale and pointing effects of subreflector positioning at 2 GHz. Keywords: low frequency Gregorian, plate scale, focus tracking, pointing. N. VanWey, F. Ghigo, R. Maddalena,
GBT Commissioning Memo 11: Plate Scale and pointing effects of subreflector positioning at 2 GHz. Keywords: low frequency Gregorian, plate scale, focus tracking, pointing. N. VanWey, F. Ghigo, R. Maddalena,
Motion Planning of a Robotic Arm on a Wheeled Vehicle on a Rugged Terrain * Abstract. 1 Introduction. Yong K. Hwangt
 Motion Planning of a Robotic Arm on a Wheeled Vehicle on a Rugged Terrain * Yong K. Hwangt Abstract This paper presents a set of motion planners for an exploration vehicle on a simulated rugged terrain.
Motion Planning of a Robotic Arm on a Wheeled Vehicle on a Rugged Terrain * Yong K. Hwangt Abstract This paper presents a set of motion planners for an exploration vehicle on a simulated rugged terrain.
ROBOT TEAMS CH 12. Experiments with Cooperative Aerial-Ground Robots
 ROBOT TEAMS CH 12 Experiments with Cooperative Aerial-Ground Robots Gaurav S. Sukhatme, James F. Montgomery, and Richard T. Vaughan Speaker: Jeff Barnett Paper Focus Heterogeneous Teams for Surveillance
ROBOT TEAMS CH 12 Experiments with Cooperative Aerial-Ground Robots Gaurav S. Sukhatme, James F. Montgomery, and Richard T. Vaughan Speaker: Jeff Barnett Paper Focus Heterogeneous Teams for Surveillance
Terrain Traversability Analysis for off-road robots using Time-Of-Flight 3D Sensing
 Terrain Traversability Analysis for off-road robots using Time-Of-Flight 3D Sensing Haris Balta 1, Geert De Cubber 1, Daniela Doroftei 1, Yvan Baudoin 1, Hichem Sahli 2 1 Royal Military Academy of Belgium
Terrain Traversability Analysis for off-road robots using Time-Of-Flight 3D Sensing Haris Balta 1, Geert De Cubber 1, Daniela Doroftei 1, Yvan Baudoin 1, Hichem Sahli 2 1 Royal Military Academy of Belgium
Final Report. Autonomous Robot: Chopper John Michael Mariano December 9, 2014
 Final Report Autonomous Robot: Chopper John Michael Mariano December 9, 2014 EEL 4665: Intelligent Machines Design Laboratory Instructors: Dr. A. Antonio Arroyo, Dr. Eric M. Schwartz TA: Nicholas Cox,
Final Report Autonomous Robot: Chopper John Michael Mariano December 9, 2014 EEL 4665: Intelligent Machines Design Laboratory Instructors: Dr. A. Antonio Arroyo, Dr. Eric M. Schwartz TA: Nicholas Cox,
Construction and Calibration of a Low-Cost 3D Laser Scanner with 360º Field of View for Mobile Robots
 Construction and Calibration of a Low-Cost 3D Laser Scanner with 360º Field of View for Mobile Robots Jorge L. Martínez, Jesús Morales, Antonio, J. Reina, Anthony Mandow, Alejandro Pequeño-Boter*, and
Construction and Calibration of a Low-Cost 3D Laser Scanner with 360º Field of View for Mobile Robots Jorge L. Martínez, Jesús Morales, Antonio, J. Reina, Anthony Mandow, Alejandro Pequeño-Boter*, and
Sensor Modalities. Sensor modality: Different modalities:
 Sensor Modalities Sensor modality: Sensors which measure same form of energy and process it in similar ways Modality refers to the raw input used by the sensors Different modalities: Sound Pressure Temperature
Sensor Modalities Sensor modality: Sensors which measure same form of energy and process it in similar ways Modality refers to the raw input used by the sensors Different modalities: Sound Pressure Temperature
3D LASER SCANNING SYSTEMS. RobotEye RE08 3D LIDAR 3D Laser Scanning System. Product Datasheet
 3D LASER SCANNING SYSTEMS RobotEye RE08 3D LIDAR 3D Laser Scanning System Product Datasheet RobotEye RE08 3D LIDAR - 3D Laser Scanning System Ocular Robotics RobotEye RE08 3D LIDAR - 3D Laser Scanning
3D LASER SCANNING SYSTEMS RobotEye RE08 3D LIDAR 3D Laser Scanning System Product Datasheet RobotEye RE08 3D LIDAR - 3D Laser Scanning System Ocular Robotics RobotEye RE08 3D LIDAR - 3D Laser Scanning
Use the slope of a graph of the cart s acceleration versus sin to determine the value of g, the acceleration due to gravity.
 Name Class Date Activity P03: Acceleration on an Incline (Acceleration Sensor) Concept DataStudio ScienceWorkshop (Mac) ScienceWorkshop (Win) Linear motion P03 Acceleration.ds (See end of activity) (See
Name Class Date Activity P03: Acceleration on an Incline (Acceleration Sensor) Concept DataStudio ScienceWorkshop (Mac) ScienceWorkshop (Win) Linear motion P03 Acceleration.ds (See end of activity) (See
Autonomous Programming FTC Challenge Workshops VCU School of Engineering September 24, 2016 Presented by: Team 8297 Geared UP!
 Autonomous Programming 2016-2017 FTC Challenge Workshops VCU School of Engineering September 24, 2016 Presented by: Team 8297 Geared UP! Autonomous in VELOCITY VORTEX The Match starts with a 30 second
Autonomous Programming 2016-2017 FTC Challenge Workshops VCU School of Engineering September 24, 2016 Presented by: Team 8297 Geared UP! Autonomous in VELOCITY VORTEX The Match starts with a 30 second
Terrain Data Real-time Analysis Based on Point Cloud for Mars Rover
 Terrain Data Real-time Analysis Based on Point Cloud for Mars Rover Haoruo ZHANG 1, Yuanjie TAN, Qixin CAO. Abstract. With the development of space exploration, more and more aerospace researchers pay
Terrain Data Real-time Analysis Based on Point Cloud for Mars Rover Haoruo ZHANG 1, Yuanjie TAN, Qixin CAO. Abstract. With the development of space exploration, more and more aerospace researchers pay
9th Intelligent Ground Vehicle Competition. Design Competition Written Report. Design Change Report AMIGO
 9th Intelligent Ground Vehicle Competition Design Competition Written Report Design Change Report AMIGO AMIGO means the friends who will join to the IGV Competition. Watanabe Laboratory Team System Control
9th Intelligent Ground Vehicle Competition Design Competition Written Report Design Change Report AMIGO AMIGO means the friends who will join to the IGV Competition. Watanabe Laboratory Team System Control
RobotEye RE08 3D LIDAR 3D Laser Scanning System. Product Datasheet
 3 D L A S E R S C A N N I N G S Y S T E M S RobotEye RE08 3D LIDAR 3D Laser Scanning System Product Datasheet 2015 Ocular Robotics Ltd All rights reserved RobotEye RE08 3D LIDAR - 3D Laser Scanning System
3 D L A S E R S C A N N I N G S Y S T E M S RobotEye RE08 3D LIDAR 3D Laser Scanning System Product Datasheet 2015 Ocular Robotics Ltd All rights reserved RobotEye RE08 3D LIDAR - 3D Laser Scanning System
Snow cover change detection with laser scanning range and brightness measurements
 Snow cover change detection with laser scanning range and brightness measurements Sanna Kaasalainen, Harri Kaartinen, Antero Kukko, Henri Niittymäki Department of Remote Sensing and Photogrammetry 5th
Snow cover change detection with laser scanning range and brightness measurements Sanna Kaasalainen, Harri Kaartinen, Antero Kukko, Henri Niittymäki Department of Remote Sensing and Photogrammetry 5th
Data Association for SLAM
 CALIFORNIA INSTITUTE OF TECHNOLOGY ME/CS 132a, Winter 2011 Lab #2 Due: Mar 10th, 2011 Part I Data Association for SLAM 1 Introduction For this part, you will experiment with a simulation of an EKF SLAM
CALIFORNIA INSTITUTE OF TECHNOLOGY ME/CS 132a, Winter 2011 Lab #2 Due: Mar 10th, 2011 Part I Data Association for SLAM 1 Introduction For this part, you will experiment with a simulation of an EKF SLAM
Project 1 : Dead Reckoning and Tracking
 CS3630 Spring 2012 Project 1 : Dead Reckoning and Tracking Group : Wayward Sons Sameer Ansari, David Bernal, Tommy Kazenstein 2/8/2012 Wayward Sons CS3630 Spring 12 Project 1 Page 2 of 12 CS 3630 (Spring
CS3630 Spring 2012 Project 1 : Dead Reckoning and Tracking Group : Wayward Sons Sameer Ansari, David Bernal, Tommy Kazenstein 2/8/2012 Wayward Sons CS3630 Spring 12 Project 1 Page 2 of 12 CS 3630 (Spring
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Mobile Autonomous Robotic Sentry (MARS) with Facial Detection and Recognition
 with Facial Detection and Recognition") Mobile Autonomous Robotic Sentry (MARS) with Facial Detection and Recognition Tyler M. Lovelly University of Florida, Dept. of Electrical & Computer Engineering 12315 Clarendon Ct Spring Hill, FL 34609
Mobile Autonomous Robotic Sentry (MARS) with Facial Detection and Recognition Tyler M. Lovelly University of Florida, Dept. of Electrical & Computer Engineering 12315 Clarendon Ct Spring Hill, FL 34609
Probabilistic Robotics
 Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
Reactive and Hybrid Agents. Based on An Introduction to MultiAgent Systems and slides by Michael Wooldridge
 Reactive and Hybrid Agents Based on An Introduction to MultiAgent Systems and slides by Michael Wooldridge Reactive Architectures Problems with symbolic/logical approaches (transduction, computational
Reactive and Hybrid Agents Based on An Introduction to MultiAgent Systems and slides by Michael Wooldridge Reactive Architectures Problems with symbolic/logical approaches (transduction, computational
A Reactive Bearing Angle Only Obstacle Avoidance Technique for Unmanned Ground Vehicles
 Proceedings of the International Conference of Control, Dynamic Systems, and Robotics Ottawa, Ontario, Canada, May 15-16 2014 Paper No. 54 A Reactive Bearing Angle Only Obstacle Avoidance Technique for
Proceedings of the International Conference of Control, Dynamic Systems, and Robotics Ottawa, Ontario, Canada, May 15-16 2014 Paper No. 54 A Reactive Bearing Angle Only Obstacle Avoidance Technique for
QUASI-3D SCANNING WITH LASERSCANNERS
 QUASI-3D SCANNING WITH LASERSCANNERS V. Willhoeft, K. Ch. Fuerstenberg, IBEO Automobile Sensor GmbH, vwi@ibeo.de INTRODUCTION: FROM 2D TO 3D Laserscanners are laser-based range-finding devices. They create
QUASI-3D SCANNING WITH LASERSCANNERS V. Willhoeft, K. Ch. Fuerstenberg, IBEO Automobile Sensor GmbH, vwi@ibeo.de INTRODUCTION: FROM 2D TO 3D Laserscanners are laser-based range-finding devices. They create
Clearpath Communication Protocol. For use with the Clearpath Robotics research platforms
 Clearpath Communication Protocol For use with the Clearpath Robotics research platforms Version: 1.1 Date: 2 September 2010 Revision History Version Date Description 1.0 26 March 2010 Release 1.1 2 September
Clearpath Communication Protocol For use with the Clearpath Robotics research platforms Version: 1.1 Date: 2 September 2010 Revision History Version Date Description 1.0 26 March 2010 Release 1.1 2 September
Announcements. Exam #2 next Thursday (March 13) Covers material from Feb. 11 through March 6
 Covers material from Feb. 11 through March 6") Multi-Robot Path Planning and Multi-Robot Traffic Management March 6, 2003 Class Meeting 16 Announcements Exam #2 next Thursday (March 13) Covers material from Feb. 11 through March 6 Up to Now Swarm-Type
Multi-Robot Path Planning and Multi-Robot Traffic Management March 6, 2003 Class Meeting 16 Announcements Exam #2 next Thursday (March 13) Covers material from Feb. 11 through March 6 Up to Now Swarm-Type
Introduction to Mobile Robotics
 Introduction to Mobile Robotics Olivier Aycard Associate Professor University of Grenoble Laboratoire d Informatique de Grenoble http://membres-liglab.imag.fr/aycard olivier. 1/22 What is a robot? Robot
Introduction to Mobile Robotics Olivier Aycard Associate Professor University of Grenoble Laboratoire d Informatique de Grenoble http://membres-liglab.imag.fr/aycard olivier. 1/22 What is a robot? Robot
Final Project Report: Mobile Pick and Place
 Final Project Report: Mobile Pick and Place Xiaoyang Liu (xiaoyan1) Juncheng Zhang (junchen1) Karthik Ramachandran (kramacha) Sumit Saxena (sumits1) Yihao Qian (yihaoq) Adviser: Dr Matthew Travers Carnegie
Final Project Report: Mobile Pick and Place Xiaoyang Liu (xiaoyan1) Juncheng Zhang (junchen1) Karthik Ramachandran (kramacha) Sumit Saxena (sumits1) Yihao Qian (yihaoq) Adviser: Dr Matthew Travers Carnegie
Studuino Block Programming Environment Guide
 Studuino Block Programming Environment Guide [DC Motors and Servomotors] This is a tutorial for the Studuino Block programming environment. As the Studuino programming environment develops, these instructions
Studuino Block Programming Environment Guide [DC Motors and Servomotors] This is a tutorial for the Studuino Block programming environment. As the Studuino programming environment develops, these instructions
Mobile Robots Locomotion
 Mobile Robots Locomotion Institute for Software Technology 1 Course Outline 1. Introduction to Mobile Robots 2. Locomotion 3. Sensors 4. Localization 5. Environment Modelling 6. Reactive Navigation 2 Today
Mobile Robots Locomotion Institute for Software Technology 1 Course Outline 1. Introduction to Mobile Robots 2. Locomotion 3. Sensors 4. Localization 5. Environment Modelling 6. Reactive Navigation 2 Today
Evaluating the Performance of a Vehicle Pose Measurement System
 Evaluating the Performance of a Vehicle Pose Measurement System Harry Scott Sandor Szabo National Institute of Standards and Technology Abstract A method is presented for evaluating the performance of
Evaluating the Performance of a Vehicle Pose Measurement System Harry Scott Sandor Szabo National Institute of Standards and Technology Abstract A method is presented for evaluating the performance of
Operating Manual. AdirPro HV8RL Red Beam Horizontal/Vertical Laser level
 Operating Manual AdirPro HV8RL Red Beam Horizontal/Vertical Laser level Maintenance and Safety The HV8RL is a class II laser according to 21CFR1040. Be careful not to expose your eyes to the laser beam.
Operating Manual AdirPro HV8RL Red Beam Horizontal/Vertical Laser level Maintenance and Safety The HV8RL is a class II laser according to 21CFR1040. Be careful not to expose your eyes to the laser beam.
Terrain Mapping and Control Optimization for a 6-Wheel Rover with Passive Suspension
 Terrain Mapping and Control Optimization for a 6-Wheel Rover with Passive Suspension Pascal Strupler, Cédric Pradalier, and Roland Siegwart Autonomous Systems Lab, ETH Zürich, Switzerland cedric.pradalier@mavt.ethz.ch
Terrain Mapping and Control Optimization for a 6-Wheel Rover with Passive Suspension Pascal Strupler, Cédric Pradalier, and Roland Siegwart Autonomous Systems Lab, ETH Zürich, Switzerland cedric.pradalier@mavt.ethz.ch
Obstacle Avoidance Project: Final Report
 ERTS: Embedded & Real Time System Version: 0.0.1 Date: December 19, 2008 Purpose: A report on P545 project: Obstacle Avoidance. This document serves as report for P545 class project on obstacle avoidance
ERTS: Embedded & Real Time System Version: 0.0.1 Date: December 19, 2008 Purpose: A report on P545 project: Obstacle Avoidance. This document serves as report for P545 class project on obstacle avoidance
SCORPIO 30 User s manual
 SCORPIO 30 User s manual 1 INDEX 1-. Description 3 2-. The Electronic Control Box.....5 2-.1 Functions....11 2.1.1 Start up Prodecure.....11 2.1.2 Settings Settings...15 2.1.3 Límits Limits....23 2.1.4
SCORPIO 30 User s manual 1 INDEX 1-. Description 3 2-. The Electronic Control Box.....5 2-.1 Functions....11 2.1.1 Start up Prodecure.....11 2.1.2 Settings Settings...15 2.1.3 Límits Limits....23 2.1.4
Exploration of an Indoor-Environment by an Autonomous Mobile Robot
 IROS '94 September 12-16, 1994 Munich, Germany page 1 of 7 Exploration of an Indoor-Environment by an Autonomous Mobile Robot Thomas Edlinger edlinger@informatik.uni-kl.de Ewald von Puttkamer puttkam@informatik.uni-kl.de
IROS '94 September 12-16, 1994 Munich, Germany page 1 of 7 Exploration of an Indoor-Environment by an Autonomous Mobile Robot Thomas Edlinger edlinger@informatik.uni-kl.de Ewald von Puttkamer puttkam@informatik.uni-kl.de
MTRX4700: Experimental Robotics
 Stefan B. Williams April, 2013 MTR4700: Experimental Robotics Assignment 3 Note: This assignment contributes 10% towards your final mark. This assignment is due on Friday, May 10 th during Week 9 before
Stefan B. Williams April, 2013 MTR4700: Experimental Robotics Assignment 3 Note: This assignment contributes 10% towards your final mark. This assignment is due on Friday, May 10 th during Week 9 before
OFERTA O120410PA CURRENT DATE 10/04//2012 VALID UNTIL 10/05/2012 SUMMIT XL
 OFERTA O120410PA CURRENT DATE 10/04//2012 VALID UNTIL 10/05/2012 SUMMIT XL CLIENT CLIENT: Gaitech REPRESENTANT: Andrew Pether MAIL: andyroojp@hotmail.com PRODUCT Introduction The SUMMIT XL has skid-steering
OFERTA O120410PA CURRENT DATE 10/04//2012 VALID UNTIL 10/05/2012 SUMMIT XL CLIENT CLIENT: Gaitech REPRESENTANT: Andrew Pether MAIL: andyroojp@hotmail.com PRODUCT Introduction The SUMMIT XL has skid-steering
Design Report prepared by: Shawn Brovold Gregory Rupp Eric Li Nathan Carlson. Faculty Advisor: Max Donath
 13 th Annual Intelligent Ground Vehicle Competition 2005 Design Report Design Report prepared by: Shawn Brovold Gregory Rupp Eric Li Nathan Carlson Faculty Advisor: Max Donath Faculty Certification I,
13 th Annual Intelligent Ground Vehicle Competition 2005 Design Report Design Report prepared by: Shawn Brovold Gregory Rupp Eric Li Nathan Carlson Faculty Advisor: Max Donath Faculty Certification I,
3D Fusion of Infrared Images with Dense RGB Reconstruction from Multiple Views - with Application to Fire-fighting Robots
 3D Fusion of Infrared Images with Dense RGB Reconstruction from Multiple Views - with Application to Fire-fighting Robots Yuncong Chen 1 and Will Warren 2 1 Department of Computer Science and Engineering,
3D Fusion of Infrared Images with Dense RGB Reconstruction from Multiple Views - with Application to Fire-fighting Robots Yuncong Chen 1 and Will Warren 2 1 Department of Computer Science and Engineering,
Exploring Unknown Structured Environments
 Exploring Unknown Structured Environments JonathanF. Diaz and Alexander Stoytchev and Ronald C. Arkin Mobile Robot Laboratory College of Computing Georgia Institute of Technology Atlanta, Georgia 3332-28
Exploring Unknown Structured Environments JonathanF. Diaz and Alexander Stoytchev and Ronald C. Arkin Mobile Robot Laboratory College of Computing Georgia Institute of Technology Atlanta, Georgia 3332-28
Calibration of a rotating multi-beam Lidar
 Calibration of a rotating multi-beam Lidar Naveed Muhammad 1,2 and Simon Lacroix 1,2 Abstract This paper presents a technique for the calibration of multi-beam laser scanners. The technique is based on
Calibration of a rotating multi-beam Lidar Naveed Muhammad 1,2 and Simon Lacroix 1,2 Abstract This paper presents a technique for the calibration of multi-beam laser scanners. The technique is based on
Southern Illinois University Edwardsville
 Southern Illinois University Edwardsville 2014-2015 I certify that the design and engineering of the vehicle Roadrunner by the SIUE Team Roadrunner has been significant and equivalent to what might be
Southern Illinois University Edwardsville 2014-2015 I certify that the design and engineering of the vehicle Roadrunner by the SIUE Team Roadrunner has been significant and equivalent to what might be
Active2012 HOSEI UNIVERSITY
 Active2012 HOSEI UNIVERSITY Faculty of Science and Engineering, Hosei University 3-7-2 Kajinocho Koganei, Tokyo 194-8584, Japan E-mail; ikko@hosei.ac.jp Faculty Advisor Statement I hereby certify that
Active2012 HOSEI UNIVERSITY Faculty of Science and Engineering, Hosei University 3-7-2 Kajinocho Koganei, Tokyo 194-8584, Japan E-mail; ikko@hosei.ac.jp Faculty Advisor Statement I hereby certify that
Space Robotics. Ioannis Rekleitis
 Space Robotics Ioannis Rekleitis On-Orbit Servicing of Satellites Work done at the Canadian Space Agency Guy Rouleau, Ioannis Rekleitis, Régent L'Archevêque, Eric Martin, Kourosh Parsa, and Erick Dupuis
Space Robotics Ioannis Rekleitis On-Orbit Servicing of Satellites Work done at the Canadian Space Agency Guy Rouleau, Ioannis Rekleitis, Régent L'Archevêque, Eric Martin, Kourosh Parsa, and Erick Dupuis
Final Exam : Introduction to Robotics. Last Updated: 9 May You will have 1 hour and 15 minutes to complete this exam
 Final Exam 16-311: Introduction to Robotics Last Updated: 9 May 2017 Name: Andrew ID: Team Number: You will have 1 hour and 15 minutes to complete this exam There are 6 sections on 20 pages. Make sure
Final Exam 16-311: Introduction to Robotics Last Updated: 9 May 2017 Name: Andrew ID: Team Number: You will have 1 hour and 15 minutes to complete this exam There are 6 sections on 20 pages. Make sure
Localization and Mapping in Urban Environments Using Mobile Robots
 Denis F. Wolf 1 and Gaurav S. Sukhatme 2 1 Department Computer Systems Institute of Mathematics and Computer Science University of São Paulo P.O.Box 668, Zip 13560-970 São Carlos SP - BRAZIL denis@icmc.usp.br
Denis F. Wolf 1 and Gaurav S. Sukhatme 2 1 Department Computer Systems Institute of Mathematics and Computer Science University of São Paulo P.O.Box 668, Zip 13560-970 São Carlos SP - BRAZIL denis@icmc.usp.br
SHARPKUNGFU TEAM DESCRIPTION 2006
 SHARPKUNGFU TEAM DESCRIPTION 2006 Qining Wang, Chunxia Rong, Yan Huang, Guangming Xie, Long Wang Intelligent Control Laboratory, College of Engineering, Peking University, Beijing 100871, China http://www.mech.pku.edu.cn/robot/fourleg/
SHARPKUNGFU TEAM DESCRIPTION 2006 Qining Wang, Chunxia Rong, Yan Huang, Guangming Xie, Long Wang Intelligent Control Laboratory, College of Engineering, Peking University, Beijing 100871, China http://www.mech.pku.edu.cn/robot/fourleg/
Robot Localization based on Geo-referenced Images and G raphic Methods
 Robot Localization based on Geo-referenced Images and G raphic Methods Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, sidahmed.berrabah@rma.ac.be Janusz Bedkowski, Łukasz Lubasiński,
Robot Localization based on Geo-referenced Images and G raphic Methods Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, sidahmed.berrabah@rma.ac.be Janusz Bedkowski, Łukasz Lubasiński,
CAUTION: NEVER LOOK DIRECTLY INTO THE LASER BEAM.
 LABORATORY 12 PHYSICAL OPTICS I: INTERFERENCE AND DIFFRACTION Objectives To be able to explain demonstrate understanding of the dependence of a double slit interference pattern on slit width, slit separation
LABORATORY 12 PHYSICAL OPTICS I: INTERFERENCE AND DIFFRACTION Objectives To be able to explain demonstrate understanding of the dependence of a double slit interference pattern on slit width, slit separation
TERRESTRIAL AND NUMERICAL PHOTOGRAMMETRY 1. MID -TERM EXAM Question 4
 TERRESTRIAL AND NUMERICAL PHOTOGRAMMETRY 1. MID -TERM EXAM Question 4 23 November 2001 Two-camera stations are located at the ends of a base, which are 191.46m long, measured horizontally. Photographs
TERRESTRIAL AND NUMERICAL PHOTOGRAMMETRY 1. MID -TERM EXAM Question 4 23 November 2001 Two-camera stations are located at the ends of a base, which are 191.46m long, measured horizontally. Photographs
Final Exam Practice Fall Semester, 2012
 COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
MANUAL FOR: Universal stabilization system for video cameras weighing from 300 g to 4(5) kg
 kg") MANUAL FOR: or Universal stabilization system for video cameras weighing from 300 g to 4(5) kg SETUP INSTRUCTIONS Front view Rear view Top view LEGEND: 1 Base plate (for tripod). 2 Fixing bolt (for camera).
MANUAL FOR: or Universal stabilization system for video cameras weighing from 300 g to 4(5) kg SETUP INSTRUCTIONS Front view Rear view Top view LEGEND: 1 Base plate (for tripod). 2 Fixing bolt (for camera).
Experimental results of a Differential Optic-Flow System
 Experimental results of a Differential Optic-Flow System Richard Kathage and Jonghyuk Kim Department of Engineering The Australian National University, Australia {richard.kathage, jonghyuk.kim}@anu.edu.au
Experimental results of a Differential Optic-Flow System Richard Kathage and Jonghyuk Kim Department of Engineering The Australian National University, Australia {richard.kathage, jonghyuk.kim}@anu.edu.au
Robotics. CSPP Artificial Intelligence March 10, 2004
 Robotics CSPP 56553 Artificial Intelligence March 10, 2004 Roadmap Robotics is AI-complete Integration of many AI techniques Classic AI Search in configuration space (Ultra) Modern AI Subsumption architecture
Robotics CSPP 56553 Artificial Intelligence March 10, 2004 Roadmap Robotics is AI-complete Integration of many AI techniques Classic AI Search in configuration space (Ultra) Modern AI Subsumption architecture
Localization of Multiple Robots with Simple Sensors
 Proceedings of the IEEE International Conference on Mechatronics & Automation Niagara Falls, Canada July 2005 Localization of Multiple Robots with Simple Sensors Mike Peasgood and Christopher Clark Lab
Proceedings of the IEEE International Conference on Mechatronics & Automation Niagara Falls, Canada July 2005 Localization of Multiple Robots with Simple Sensors Mike Peasgood and Christopher Clark Lab
Lab 12 - Interference-Diffraction of Light Waves
 Lab 12 - Interference-Diffraction of Light Waves Equipment and Safety: No special safety equipment is required for this lab. Do not look directly into the laser. Do not point the laser at other people.
Lab 12 - Interference-Diffraction of Light Waves Equipment and Safety: No special safety equipment is required for this lab. Do not look directly into the laser. Do not point the laser at other people.
USING 3D DATA FOR MONTE CARLO LOCALIZATION IN COMPLEX INDOOR ENVIRONMENTS. Oliver Wulf, Bernardo Wagner
 USING 3D DATA FOR MONTE CARLO LOCALIZATION IN COMPLEX INDOOR ENVIRONMENTS Oliver Wulf, Bernardo Wagner Institute for Systems Engineering (RTS/ISE), University of Hannover, Germany Mohamed Khalaf-Allah
USING 3D DATA FOR MONTE CARLO LOCALIZATION IN COMPLEX INDOOR ENVIRONMENTS Oliver Wulf, Bernardo Wagner Institute for Systems Engineering (RTS/ISE), University of Hannover, Germany Mohamed Khalaf-Allah
Autonomous Vehicle Navigation Using Stereoscopic Imaging
 Autonomous Vehicle Navigation Using Stereoscopic Imaging Project Proposal By: Beach Wlaznik Advisors: Dr. Huggins Dr. Stewart December 7, 2006 I. Introduction The objective of the Autonomous Vehicle Navigation
Autonomous Vehicle Navigation Using Stereoscopic Imaging Project Proposal By: Beach Wlaznik Advisors: Dr. Huggins Dr. Stewart December 7, 2006 I. Introduction The objective of the Autonomous Vehicle Navigation
Ceilbot vision and mapping system
 Ceilbot vision and mapping system Provide depth and camera data from the robot's environment Keep a map of the environment based on the received data Keep track of the robot's location on the map Recognize
Ceilbot vision and mapping system Provide depth and camera data from the robot's environment Keep a map of the environment based on the received data Keep track of the robot's location on the map Recognize
Safe Prediction-Based Local Path Planning using Obstacle Probability Sections
 Slide 1 Safe Prediction-Based Local Path Planning using Obstacle Probability Sections Tanja Hebecker and Frank Ortmeier Chair of Software Engineering, Otto-von-Guericke University of Magdeburg, Germany
Slide 1 Safe Prediction-Based Local Path Planning using Obstacle Probability Sections Tanja Hebecker and Frank Ortmeier Chair of Software Engineering, Otto-von-Guericke University of Magdeburg, Germany
Optimized Design of 3D Laser Triangulation Systems
 The Scan Principle of 3D Laser Triangulation Triangulation Geometry Example of Setup Z Y X Target as seen from the Camera Sensor Image of Laser Line The Scan Principle of 3D Laser Triangulation Detektion
The Scan Principle of 3D Laser Triangulation Triangulation Geometry Example of Setup Z Y X Target as seen from the Camera Sensor Image of Laser Line The Scan Principle of 3D Laser Triangulation Detektion
SAE Aerospace Control & Guidance Systems Committee #97 March 1-3, 2006 AFOSR, AFRL. Georgia Tech, MIT, UCLA, Virginia Tech
 Systems for Aircraft SAE Aerospace Control & Guidance Systems Committee #97 March 1-3, 2006 AFOSR, AFRL Georgia Tech, MIT, UCLA, Virginia Tech controls.ae.gatech.edu/avcs Systems Systems MURI Development
Systems for Aircraft SAE Aerospace Control & Guidance Systems Committee #97 March 1-3, 2006 AFOSR, AFRL Georgia Tech, MIT, UCLA, Virginia Tech controls.ae.gatech.edu/avcs Systems Systems MURI Development
Dräger UCF 6000 Thermal Imaging Camera
 Dräger UCF 6000 Thermal Imaging Camera Missing important details at a fire scene can place lives at risk. But fire, smoke and darkness make visibility and navigation difficult. The UCF 6000 thermal imaging
Dräger UCF 6000 Thermal Imaging Camera Missing important details at a fire scene can place lives at risk. But fire, smoke and darkness make visibility and navigation difficult. The UCF 6000 thermal imaging
NAVIGATION AND RETRO-TRAVERSE ON A REMOTELY OPERATED VEHICLE
 NAVIGATION AND RETRO-TRAVERSE ON A REMOTELY OPERATED VEHICLE Karl Murphy Systems Integration Group Robot Systems Division National Institute of Standards and Technology Gaithersburg, MD 0899 Abstract During
NAVIGATION AND RETRO-TRAVERSE ON A REMOTELY OPERATED VEHICLE Karl Murphy Systems Integration Group Robot Systems Division National Institute of Standards and Technology Gaithersburg, MD 0899 Abstract During
3D Model-Based Dynamic Feature Planning for Laser Scanner-Based Navigation of Vehicles
 3D Model-Based Dynamic Feature Planning for Laser Scanner-Based Navigation of Vehicles Roland Stahn 1,2 and Andreas Stopp 1 1 DaimlerChrysler AG, Group Research, Assistance and Safety Systems, Berlin,
3D Model-Based Dynamic Feature Planning for Laser Scanner-Based Navigation of Vehicles Roland Stahn 1,2 and Andreas Stopp 1 1 DaimlerChrysler AG, Group Research, Assistance and Safety Systems, Berlin,
Table of Contents. Introduction 1. Software installation 2. Remote control and video transmission 3. Navigation 4. FAQ 5.
 Table of Contents Introduction 1. Software installation 2. Remote control and video transmission 3. Navigation 4. FAQ 5. Maintenance 1.1 1.2 1.3 1.4 1.5 1.6 2 Introduction Introduction Introduction The
Table of Contents Introduction 1. Software installation 2. Remote control and video transmission 3. Navigation 4. FAQ 5. Maintenance 1.1 1.2 1.3 1.4 1.5 1.6 2 Introduction Introduction Introduction The
DAMAGE INSPECTION AND EVALUATION IN THE WHOLE VIEW FIELD USING LASER
 DAMAGE INSPECTION AND EVALUATION IN THE WHOLE VIEW FIELD USING LASER A. Kato and T. A. Moe Department of Mechanical Engineering Chubu University Kasugai, Aichi 487-8501, Japan ABSTRACT In this study, we
DAMAGE INSPECTION AND EVALUATION IN THE WHOLE VIEW FIELD USING LASER A. Kato and T. A. Moe Department of Mechanical Engineering Chubu University Kasugai, Aichi 487-8501, Japan ABSTRACT In this study, we
Dräger UCF 9000 NFPA Certified Thermal Imaging Camera
 Dräger UCF 9000 NFPA Certified Thermal Imaging Camera When you enter an unknown environment, you need all the information you can get as quickly and easily as possible. The Dräger UCF 9000 is an intrinsically
Dräger UCF 9000 NFPA Certified Thermal Imaging Camera When you enter an unknown environment, you need all the information you can get as quickly and easily as possible. The Dräger UCF 9000 is an intrinsically
AUTONOMOUS CONTROL OF AN OMNI-DIRECTIONAL MOBILE ROBOT
 Projects, Vol. 11, 2004 ISSN 1172-8426 Printed in New Zealand. All rights reserved. 2004 College of Sciences, Massey University AUTONOMOUS CONTROL OF AN OMNI-DIRECTIONAL MOBILE ROBOT C. J. Duncan Abstract:
Projects, Vol. 11, 2004 ISSN 1172-8426 Printed in New Zealand. All rights reserved. 2004 College of Sciences, Massey University AUTONOMOUS CONTROL OF AN OMNI-DIRECTIONAL MOBILE ROBOT C. J. Duncan Abstract:
CALCULUS II. Parametric Equations and Polar Coordinates. Paul Dawkins
 CALCULUS II Parametric Equations and Polar Coordinates Paul Dawkins Table of Contents Preface... ii Parametric Equations and Polar Coordinates... 3 Introduction... 3 Parametric Equations and Curves...
CALCULUS II Parametric Equations and Polar Coordinates Paul Dawkins Table of Contents Preface... ii Parametric Equations and Polar Coordinates... 3 Introduction... 3 Parametric Equations and Curves...
PATENT LIABILITY ANALYSIS. Daniel Barrett Sebastian Hening Sandunmalee Abeyratne Anthony Myers
 PATENT LIABILITY ANALYSIS Autonomous Targeting Vehicle (ATV) Daniel Barrett Sebastian Hening Sandunmalee Abeyratne Anthony Myers Autonomous wheeled vehicle with obstacle avoidance Two infrared range finder
PATENT LIABILITY ANALYSIS Autonomous Targeting Vehicle (ATV) Daniel Barrett Sebastian Hening Sandunmalee Abeyratne Anthony Myers Autonomous wheeled vehicle with obstacle avoidance Two infrared range finder
Multiple camera, laser rangefinder, and encoder data fusion for navigation of a differentially steered 3-wheeled autonomous vehicle
 Multiple camera, laser rangefinder, and encoder data fusion for navigation of a differentially steered 3-wheeled autonomous vehicle David C. Conner*, Philip R. Kedrowski, Charles F. Reinholtz Department
Multiple camera, laser rangefinder, and encoder data fusion for navigation of a differentially steered 3-wheeled autonomous vehicle David C. Conner*, Philip R. Kedrowski, Charles F. Reinholtz Department