Mobile Robots Locomotion
|
|
|
- Tyler Elvin Black
- 6 years ago
- Views:
Transcription
1 Mobile Robots Locomotion Institute for Software Technology 1
2 Course Outline 1. Introduction to Mobile Robots 2. Locomotion 3. Sensors 4. Localization 5. Environment Modelling 6. Reactive Navigation 2
3 Today s Agenda Motivation for Locomotion Basic Definitions Legged Locomotion Wheeled Locomotion Properties of Locomotion and their Application Feedback Control 3


4 Literature Introduction to Autonomous Mobile Robots. 2 nd Edition. Roland Siegwart, Illah Reza Nourbakhsh, Davide Scaramuzza. MIT Press Springer Handbook of Robotics. Bruno Siciliano and Oussama Khatib. Springer
5 Again, Robotics is Easy perception modelling domain model environment model information extraction raw data planning task cognition reasoning path planning navigation path execution actuator commands behavior control sensing environment/world acting 5


6 Locomotion Oxford Dictionary: movement or the ability to move from one place to another 6
7 Locomotion a mobile robot needs locomotion has a long history in nature different optimizations for speed stability efficiency 7
8 Locomotion in Biological Systems [Siegwart, Nourbakhsh, Scaramuzza, 2011, MIT Press] 8
9 biological locomotion is hard to replicate mechanical complexity duplication miniaturization actuation energy storage Inspiration by Nature [Siegwart, Nourbakhsh, Scaramuzza, 2011, MIT Press] 9
10 Efficiency I [Siegwart, Nourbakhsh, Scaramuzza, 2011, MIT Press] 10

11 Efficiency II [Sicillano, Khatib, 2008, Springer] 11
12 stability Key Issues of Locomotion number and geometry of contact points center of gravity static/dynamic stability inclination of the terrain characteristics of contact contact points/path size and shape angle of contact friction type of environment structure medium, e.g. water, air, soft or hard ground 12
13 Dimensionality the degree of freedom (DOF) of a workspace is its overall dimensionality on (flat) ground DOF=3 in the air or below water DOF=6 13
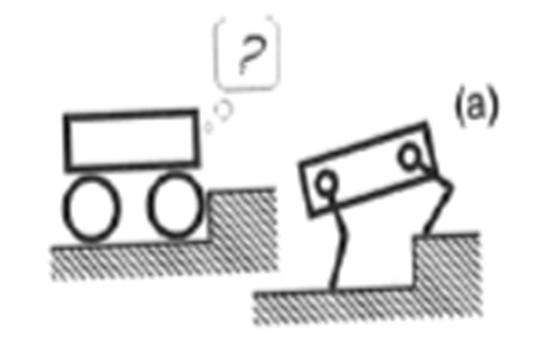
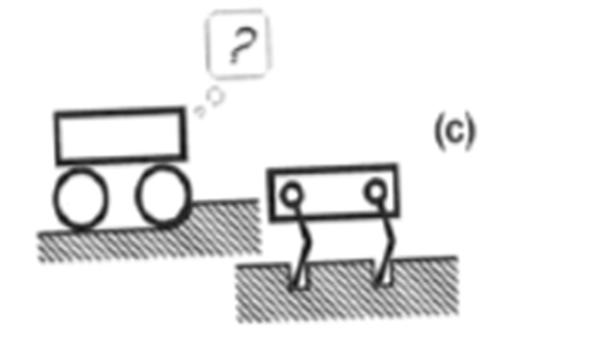
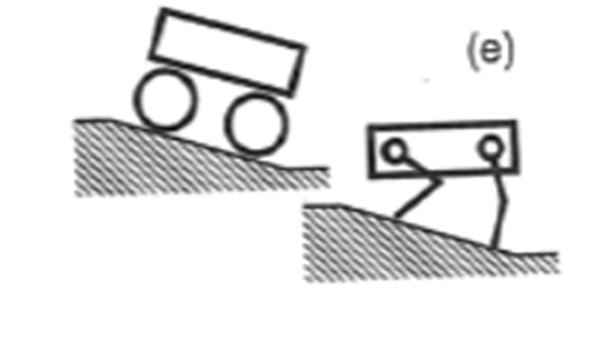
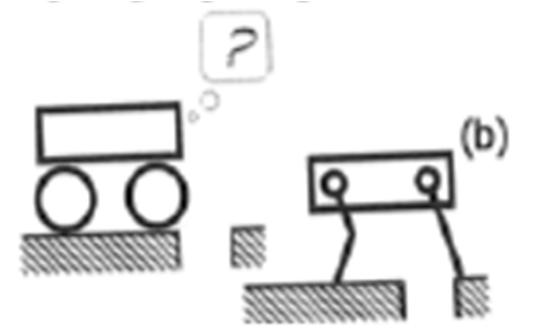

14 [Siegwart, Nourbakhsh, Scaramuzza, 2011, MIT Press] Institute for Software Technology 14 Legs versus Wheels
 [Sicillano, Khatib, 2008, Springer]")
15 Zero Moment Point Movement (ZMP) commonly used method for stable walking ZMP is defined as that point on the ground at which the net moment of the inertial forces and the gravity has no component along the horizontal axes (Vukobratović and Branislav) [Sicillano, Khatib, 2008, Springer] 15
 of body relative position of body to ZMP [Sicillano, Khatib, 2008, Springer] 0,0,")
16 Zero Moment Point Movement suppose a legged robot comprising several bodies force vector acing on body (gravity plus external) angular velocity of body inertia tensor ( ) of body relative position of body to ZMP [Sicillano, Khatib, 2008, Springer] 0,0, 16


17 a robot able to use ZMP needs: there are at least six fully actuated joints for each leg the joints are position controlled the feet are equipped with force sensors, which are used to measure the ZMP Requirements for ZMP 17
18 Wheel Types standard castor Swedish spherical Side View Front View Top View [Siegwart, Nourbakhsh, Scaramuzza, 2011, MIT Press] 18
19 Typical Arrangements (2 and 3 Wheels) 2 Wheels 3 Wheels [Siegwart, Nourbakhsh, Scaramuzza, 2011, MIT Press] 19
20 Typical Arrangements ( 4 Wheels) [Siegwart, Nourbakhsh, Scaramuzza, 2011, MIT Press]

21 NASA Mars Rover - Rocker-Bogie hybrid between walking and driving allows to climb obstacles reduce movement of body Advanced Mechanisms [Nasa/JPL] 21


22 Other Forms of Locomotion in the air below water
23 Homogeneous Transformation we need a transformation between the motion in the reference frame and the robot frame the transformation depend on the global angle,,,, cos sin 0 sin cos
24 Kinematic Constraints an arrangement comprises wheels of different types each wheel provides an individual velocity and individual parameters, e.g. steering anlge to determine the maneuverability of an attunement we use 2 sorts of constraints rolling constraints: all motions in the wheel plane have to be accompanied with the appropriate wheel spin sliding constraints: the motion orthogonal to the wheel has to be zero 24
25 Fixed Standard Wheel,, sin cos cos 0RKC [Siegwart, Nourbakhsh, Scaramuzza, 2011, MIT Press] cos sin 0SKC 25
26 Steered Standard Wheel same as fixed standard wheel expect steering is now a function of time,, [Siegwart, Nourbakhsh, Scaramuzza, 2011, MIT Press] sin cos cos 0RKC cos sin 0SKC 26
27 Swedish Wheel [Siegwart, Nourbakhsh, Scaramuzza, 2011, MIT Press] sin cos cos cos 0 RKC cos sin sin 0SKC 27
28 Spherical Wheel same as fixed standard wheel expect steering is now a free variable [Siegwart, Nourbakhsh, Scaramuzza, 2011, MIT Press] sin cos cos 0RKC cos sin 0SKC 28
29 Combining the Constraints I the wheel arrangement comprises fixed and steerable wheels, denotes the steering angles while denotes all fixed angles denotes wheel speed of the fixed wheels while denotes wheel speed of the steered wheels, denotes the combination 29
30 Combining the Constraints II Rolling Constraints 0with Sliding Constraints with All Together 0 and 30
31 Maneuverability we can use the constraints to investigate the mobility potential of a robot the degree of mobility is defined as: 3 represents the number of DOF that can immediately manipulated by changes in the wheel velocities related to the location of the instantaneous center of rotation (ICR) the degree of steerability is defined as: 0 2 depends on the number of steerable wheels robot maneuverability related to the DOF a robot is able to manipulate 31
32 Application of Constraints 32

33 Automatic Reconfigurable Omni-Drive [Brandstötter, Hofbauer, Steinbauer, Wotawa IROS 2007] 33
34 Automatic Reconfigurable Omni-Drive motor 1 fails motor 2 fails motor 3 fails 34
35 [Siegwart, Nourbakhsh, Scaramuzza, 2011, MIT Press] Institute for Software Technology 35 (Non)-Holomorphic
36 Feedback Control move a differential drive to a goal non-holonomic constraints we need differential inverse kinematics lim 0 [Siegwart, Nourbakhsh, Scaramuzza, 2011, MIT Press] 36
37 Control Law + 3, 8, 1.5 [Siegwart, Nourbakhsh, Scaramuzza, 2011, MIT Press] 37
38 Questions? Thank you! 38
10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T
![10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T](/thumbs/79/79288754.jpg "10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T") 3 3 Motion Control (wheeled robots) Introduction: Mobile Robot Kinematics Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground
3 3 Motion Control (wheeled robots) Introduction: Mobile Robot Kinematics Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground
Mobile Robots Locomotion & Sensors
 Mobile Robots Locomotion & Sensors Institute for Software Technology 1 Robotics is Easy control behavior perception modelling domain model environment model information extraction raw data planning task
Mobile Robots Locomotion & Sensors Institute for Software Technology 1 Robotics is Easy control behavior perception modelling domain model environment model information extraction raw data planning task
Motion Control (wheeled robots)
") Motion Control (wheeled robots) Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground Definition of required motion -> speed control,
Motion Control (wheeled robots) Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground Definition of required motion -> speed control,
CMPUT 412 Motion Control Wheeled robots. Csaba Szepesvári University of Alberta
 CMPUT 412 Motion Control Wheeled robots Csaba Szepesvári University of Alberta 1 Motion Control (wheeled robots) Requirements Kinematic/dynamic model of the robot Model of the interaction between the wheel
CMPUT 412 Motion Control Wheeled robots Csaba Szepesvári University of Alberta 1 Motion Control (wheeled robots) Requirements Kinematic/dynamic model of the robot Model of the interaction between the wheel
Mobile Robotics. Marcello Restelli. Dipartimento di Elettronica e Informazione Politecnico di Milano tel:
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Mobile Robotics Robotica for Computer Engineering students A.A. 2006/2007
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Mobile Robotics Robotica for Computer Engineering students A.A. 2006/2007
Introduction to Autonomous Mobile Robots
 Introduction to Autonomous Mobile Robots second edition Roland Siegwart, Illah R. Nourbakhsh, and Davide Scaramuzza The MIT Press Cambridge, Massachusetts London, England Contents Acknowledgments xiii
Introduction to Autonomous Mobile Robots second edition Roland Siegwart, Illah R. Nourbakhsh, and Davide Scaramuzza The MIT Press Cambridge, Massachusetts London, England Contents Acknowledgments xiii
MEM380 Applied Autonomous Robots Winter Robot Kinematics
 MEM38 Applied Autonomous obots Winter obot Kinematics Coordinate Transformations Motivation Ultimatel, we are interested in the motion of the robot with respect to a global or inertial navigation frame
MEM38 Applied Autonomous obots Winter obot Kinematics Coordinate Transformations Motivation Ultimatel, we are interested in the motion of the robot with respect to a global or inertial navigation frame
Robotics (Kinematics) Winter 1393 Bonab University
 Winter 1393 Bonab University") Robotics () Winter 1393 Bonab University : most basic study of how mechanical systems behave Introduction Need to understand the mechanical behavior for: Design Control Both: Manipulators, Mobile Robots
Robotics () Winter 1393 Bonab University : most basic study of how mechanical systems behave Introduction Need to understand the mechanical behavior for: Design Control Both: Manipulators, Mobile Robots
Centre for Autonomous Systems
 Robot Henrik I Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se 27th April 2005 Outline 1 duction 2 Kinematic and Constraints 3 Mobile Robot 4 Mobile Robot 5 Beyond Basic 6 Kinematic 7
Robot Henrik I Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se 27th April 2005 Outline 1 duction 2 Kinematic and Constraints 3 Mobile Robot 4 Mobile Robot 5 Beyond Basic 6 Kinematic 7
Mobile Robot Kinematics
 Mobile Robot Kinematics Dr. Kurtuluş Erinç Akdoğan kurtuluserinc@cankaya.edu.tr INTRODUCTION Kinematics is the most basic study of how mechanical systems behave required to design to control Manipulator
Mobile Robot Kinematics Dr. Kurtuluş Erinç Akdoğan kurtuluserinc@cankaya.edu.tr INTRODUCTION Kinematics is the most basic study of how mechanical systems behave required to design to control Manipulator
Lecture 1 Wheeled Mobile Robots (WMRs)
") Lecture 1 Wheeled Mobile Robots (WMRs) Course Chair: Prof. M. De Cecco Teaching: A. Cesarini Mechatronics Department, University of Trento Email: andrea.cesarini@unitn.it http://www.miro.ing.unitn.it/
Lecture 1 Wheeled Mobile Robots (WMRs) Course Chair: Prof. M. De Cecco Teaching: A. Cesarini Mechatronics Department, University of Trento Email: andrea.cesarini@unitn.it http://www.miro.ing.unitn.it/
Introduction to Robotics
 Introduction to Robotics Ph.D. Antonio Marin-Hernandez Artificial Intelligence Department Universidad Veracruzana Sebastian Camacho # 5 Xalapa, Veracruz Robotics Action and Perception LAAS-CNRS 7, av du
Introduction to Robotics Ph.D. Antonio Marin-Hernandez Artificial Intelligence Department Universidad Veracruzana Sebastian Camacho # 5 Xalapa, Veracruz Robotics Action and Perception LAAS-CNRS 7, av du
BEST2015 Autonomous Mobile Robots Lecture 2: Mobile Robot Kinematics and Control
 BEST2015 Autonomous Mobile Robots Lecture 2: Mobile Robot Kinematics and Control Renaud Ronsse renaud.ronsse@uclouvain.be École polytechnique de Louvain, UCLouvain July 2015 1 Introduction Mobile robot
BEST2015 Autonomous Mobile Robots Lecture 2: Mobile Robot Kinematics and Control Renaud Ronsse renaud.ronsse@uclouvain.be École polytechnique de Louvain, UCLouvain July 2015 1 Introduction Mobile robot
Mobile Robots Summery. Autonomous Mobile Robots
 Mobile Robots Summery Roland Siegwart Mike Bosse, Marco Hutter, Martin Rufli, Davide Scaramuzza, (Margarita Chli, Paul Furgale) Mobile Robots Summery 1 Introduction probabilistic map-based localization
Mobile Robots Summery Roland Siegwart Mike Bosse, Marco Hutter, Martin Rufli, Davide Scaramuzza, (Margarita Chli, Paul Furgale) Mobile Robots Summery 1 Introduction probabilistic map-based localization
Unit 2: Locomotion Kinematics of Wheeled Robots: Part 3
 Unit 2: Locomotion Kinematics of Wheeled Robots: Part 3 Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 28, 2014 COMP 4766/6778 (MUN) Kinematics of
Unit 2: Locomotion Kinematics of Wheeled Robots: Part 3 Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 28, 2014 COMP 4766/6778 (MUN) Kinematics of
EE565:Mobile Robotics Lecture 2
 EE565:Mobile Robotics Lecture 2 Welcome Dr. Ing. Ahmad Kamal Nasir Organization Lab Course Lab grading policy (40%) Attendance = 10 % In-Lab tasks = 30 % Lab assignment + viva = 60 % Make a group Either
EE565:Mobile Robotics Lecture 2 Welcome Dr. Ing. Ahmad Kamal Nasir Organization Lab Course Lab grading policy (40%) Attendance = 10 % In-Lab tasks = 30 % Lab assignment + viva = 60 % Make a group Either
Robotics. CSPP Artificial Intelligence March 10, 2004
 Robotics CSPP 56553 Artificial Intelligence March 10, 2004 Roadmap Robotics is AI-complete Integration of many AI techniques Classic AI Search in configuration space (Ultra) Modern AI Subsumption architecture
Robotics CSPP 56553 Artificial Intelligence March 10, 2004 Roadmap Robotics is AI-complete Integration of many AI techniques Classic AI Search in configuration space (Ultra) Modern AI Subsumption architecture
Experimental Verification of Stability Region of Balancing a Single-wheel Robot: an Inverted Stick Model Approach
 IECON-Yokohama November 9-, Experimental Verification of Stability Region of Balancing a Single-wheel Robot: an Inverted Stick Model Approach S. D. Lee Department of Mechatronics Engineering Chungnam National
IECON-Yokohama November 9-, Experimental Verification of Stability Region of Balancing a Single-wheel Robot: an Inverted Stick Model Approach S. D. Lee Department of Mechatronics Engineering Chungnam National
Zürich. Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza. ETH Master Course: L Autonomous Mobile Robots Summary
 Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
Fundamental problems in mobile robotics
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Kinematics Fundamental problems in mobile robotics Locomotion: how the robot moves in the environment Perception: how
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Kinematics Fundamental problems in mobile robotics Locomotion: how the robot moves in the environment Perception: how
EEE 187: Robotics Summary 2
 1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
Lecture «Robot Dynamics»: Kinematics 3
 Lecture «Robot Dynamics»: Kinematics 3 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) office hour: LEE
Lecture «Robot Dynamics»: Kinematics 3 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) office hour: LEE
Lecture «Robot Dynamics»: Kinematic Control
 Lecture «Robot Dynamics»: Kinematic Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Lecture «Robot Dynamics»: Kinematic Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
What Is SimMechanics?
 SimMechanics 1 simulink What Is Simulink? Simulink is a tool for simulating dynamic systems with a graphical interface specially developed for this purpose. Physical Modeling runs within the Simulink environment
SimMechanics 1 simulink What Is Simulink? Simulink is a tool for simulating dynamic systems with a graphical interface specially developed for this purpose. Physical Modeling runs within the Simulink environment
CHAPTER 3 MATHEMATICAL MODEL
 38 CHAPTER 3 MATHEMATICAL MODEL 3.1 KINEMATIC MODEL 3.1.1 Introduction The kinematic model of a mobile robot, represented by a set of equations, allows estimation of the robot s evolution on its trajectory,
38 CHAPTER 3 MATHEMATICAL MODEL 3.1 KINEMATIC MODEL 3.1.1 Introduction The kinematic model of a mobile robot, represented by a set of equations, allows estimation of the robot s evolution on its trajectory,
Lecture «Robot Dynamics»: Multi-body Kinematics
 Lecture «Robot Dynamics»: Multi-body Kinematics 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco
Lecture «Robot Dynamics»: Multi-body Kinematics 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco
Lecture «Robot Dynamics»: Kinematics 3
 Lecture «Robot Dynamics»: Kinematics 3 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Lecture «Robot Dynamics»: Kinematics 3 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Chapter 2 Intelligent Behaviour Modelling and Control for Mobile Manipulators
 Chapter Intelligent Behaviour Modelling and Control for Mobile Manipulators Ayssam Elkady, Mohammed Mohammed, Eslam Gebriel, and Tarek Sobh Abstract In the last several years, mobile manipulators have
Chapter Intelligent Behaviour Modelling and Control for Mobile Manipulators Ayssam Elkady, Mohammed Mohammed, Eslam Gebriel, and Tarek Sobh Abstract In the last several years, mobile manipulators have
Table of Contents. Chapter 1. Modeling and Identification of Serial Robots... 1 Wisama KHALIL and Etienne DOMBRE
 Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
Lecture «Robot Dynamics»: Introduction
 Lecture «Robot Dynamics»: Introduction 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG G1 Wednesday 8:15 10:00, according to schedule (about every 2nd week) office hour: LEE
Lecture «Robot Dynamics»: Introduction 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG G1 Wednesday 8:15 10:00, according to schedule (about every 2nd week) office hour: LEE
Chapter 4 Dynamics. Part Constrained Kinematics and Dynamics. Mobile Robotics - Prof Alonzo Kelly, CMU RI
 Chapter 4 Dynamics Part 2 4.3 Constrained Kinematics and Dynamics 1 Outline 4.3 Constrained Kinematics and Dynamics 4.3.1 Constraints of Disallowed Direction 4.3.2 Constraints of Rolling without Slipping
Chapter 4 Dynamics Part 2 4.3 Constrained Kinematics and Dynamics 1 Outline 4.3 Constrained Kinematics and Dynamics 4.3.1 Constraints of Disallowed Direction 4.3.2 Constraints of Rolling without Slipping
DETC THREE-DIMENSIONAL KINEMATIC ANALYSIS OF THE ACTUATED SPOKE WHEEL ROBOT. September 10-13, 2006, Philadelphia, Pennsylvania, USA
 Proceedings Proceedings of IDETC/CIE of IDETC 06 2006 ASME 2006 ASME International International Design Design Engineering Engineering Technical Technical Conferences Conferences & September Computers
Proceedings Proceedings of IDETC/CIE of IDETC 06 2006 ASME 2006 ASME International International Design Design Engineering Engineering Technical Technical Conferences Conferences & September Computers
Stability control of a wheel-legged mini-rover
 Stability control of a wheel-legged mini-rover C. Grand, F. Ben Amar, F. Plumet and Ph. Bidaud Laboratoire de Robotique de Paris, Université de Paris VI 18, route du Panorama, 92265 Fontenay-Aux-Roses,
Stability control of a wheel-legged mini-rover C. Grand, F. Ben Amar, F. Plumet and Ph. Bidaud Laboratoire de Robotique de Paris, Université de Paris VI 18, route du Panorama, 92265 Fontenay-Aux-Roses,
Table of Contents Introduction Historical Review of Robotic Orienting Devices Kinematic Position Analysis Instantaneous Kinematic Analysis
 Table of Contents 1 Introduction 1 1.1 Background in Robotics 1 1.2 Robot Mechanics 1 1.2.1 Manipulator Kinematics and Dynamics 2 1.3 Robot Architecture 4 1.4 Robotic Wrists 4 1.5 Origins of the Carpal
Table of Contents 1 Introduction 1 1.1 Background in Robotics 1 1.2 Robot Mechanics 1 1.2.1 Manipulator Kinematics and Dynamics 2 1.3 Robot Architecture 4 1.4 Robotic Wrists 4 1.5 Origins of the Carpal
Kinematics. Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position.
 Kinematics Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position. 1/31 Statics deals with the forces and moments which are aplied on the mechanism
Kinematics Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position. 1/31 Statics deals with the forces and moments which are aplied on the mechanism
Session #5 2D Mechanisms: Mobility, Kinematic Analysis & Synthesis
 Session #5 2D Mechanisms: Mobility, Kinematic Analysis & Synthesis Courtesy of Design Simulation Technologies, Inc. Used with permission. Dan Frey Today s Agenda Collect assignment #2 Begin mechanisms
Session #5 2D Mechanisms: Mobility, Kinematic Analysis & Synthesis Courtesy of Design Simulation Technologies, Inc. Used with permission. Dan Frey Today s Agenda Collect assignment #2 Begin mechanisms
1. Introduction 1 2. Mathematical Representation of Robots
 1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
Implementation of a Capacitive Proximity Sensor System for a Fully Maneuverable Modular Mobile Robot to Evade Humans
 Philipp Zech, Justus Piater (Eds.) Proceedings of the Austrian Robotics Workshop 2018 2018 innsbruck university press, ISBN 978-3-903187-22-1, DOI 10.15203/3187-22-1 Implementation of a Capacitive Proximity
Philipp Zech, Justus Piater (Eds.) Proceedings of the Austrian Robotics Workshop 2018 2018 innsbruck university press, ISBN 978-3-903187-22-1, DOI 10.15203/3187-22-1 Implementation of a Capacitive Proximity
Chapter 3: Kinematics Locomotion. Ross Hatton and Howie Choset
 Chapter 3: Kinematics Locomotion Ross Hatton and Howie Choset 1 (Fully/Under)Actuated Fully Actuated Control all of the DOFs of the system Controlling the joint angles completely specifies the configuration
Chapter 3: Kinematics Locomotion Ross Hatton and Howie Choset 1 (Fully/Under)Actuated Fully Actuated Control all of the DOFs of the system Controlling the joint angles completely specifies the configuration
Open Access The Kinematics Analysis and Configuration Optimize of Quadruped Robot. Jinrong Zhang *, Chenxi Wang and Jianhua Zhang
 Send Orders for Reprints to reprints@benthamscience.ae The Open Automation and Control Systems Journal, 014, 6, 1685-1690 1685 Open Access The Kinematics Analysis and Configuration Optimize of Quadruped
Send Orders for Reprints to reprints@benthamscience.ae The Open Automation and Control Systems Journal, 014, 6, 1685-1690 1685 Open Access The Kinematics Analysis and Configuration Optimize of Quadruped
Quadruped Robots and Legged Locomotion
 Quadruped Robots and Legged Locomotion J. Zico Kolter Computer Science Department Stanford University Joint work with Pieter Abbeel, Andrew Ng Why legged robots? 1 Why Legged Robots? There is a need for
Quadruped Robots and Legged Locomotion J. Zico Kolter Computer Science Department Stanford University Joint work with Pieter Abbeel, Andrew Ng Why legged robots? 1 Why Legged Robots? There is a need for
Introduction to Robotics
 Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Non Linear Control of Four Wheel Omnidirectional Mobile Robot: Modeling, Simulation and Real-Time Implementation
 Non Linear Control of Four Wheel Omnidirectional Mobile Robot: Modeling, Simulation and Real-Time Implementation eer Alakshendra Research Scholar Robotics Lab Dr Shital S.Chiddarwar Supervisor Robotics
Non Linear Control of Four Wheel Omnidirectional Mobile Robot: Modeling, Simulation and Real-Time Implementation eer Alakshendra Research Scholar Robotics Lab Dr Shital S.Chiddarwar Supervisor Robotics
SIMULATION ENVIRONMENT PROPOSAL, ANALYSIS AND CONTROL OF A STEWART PLATFORM MANIPULATOR
 SIMULATION ENVIRONMENT PROPOSAL, ANALYSIS AND CONTROL OF A STEWART PLATFORM MANIPULATOR Fabian Andres Lara Molina, Joao Mauricio Rosario, Oscar Fernando Aviles Sanchez UNICAMP (DPM-FEM), Campinas-SP, Brazil,
SIMULATION ENVIRONMENT PROPOSAL, ANALYSIS AND CONTROL OF A STEWART PLATFORM MANIPULATOR Fabian Andres Lara Molina, Joao Mauricio Rosario, Oscar Fernando Aviles Sanchez UNICAMP (DPM-FEM), Campinas-SP, Brazil,
Robot mechanics and kinematics
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2017/18 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2017/18 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
MTRX4700 Experimental Robotics
 MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
Robotics/Perception II
 Robotics/Perception II Artificial Intelligence and Integrated Computer Systems Division (AIICS) Outline Sensors - summary Computer systems Robotic architectures Mapping and Localization Motion planning
Robotics/Perception II Artificial Intelligence and Integrated Computer Systems Division (AIICS) Outline Sensors - summary Computer systems Robotic architectures Mapping and Localization Motion planning
Introduction to Information Science and Technology (IST) Part IV: Intelligent Machines and Robotics Planning
 Part IV: Intelligent Machines and Robotics Planning") Introduction to Information Science and Technology (IST) Part IV: Intelligent Machines and Robotics Planning Sören Schwertfeger / 师泽仁 ShanghaiTech University ShanghaiTech University - SIST - 10.05.2017
Introduction to Information Science and Technology (IST) Part IV: Intelligent Machines and Robotics Planning Sören Schwertfeger / 师泽仁 ShanghaiTech University ShanghaiTech University - SIST - 10.05.2017
Cinematica dei Robot Mobili su Ruote. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Cinematica dei Robot Mobili su Ruote Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Riferimenti bibliografici Roland SIEGWART, Illah R. NOURBAKHSH Introduction to Autonomous Mobile
Cinematica dei Robot Mobili su Ruote Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Riferimenti bibliografici Roland SIEGWART, Illah R. NOURBAKHSH Introduction to Autonomous Mobile
Cobots
 Cobots http://cobot.com Michael Peshkin J. Edward Colgate Witaya Wannasuphoprasit ( Wit ) Intelligent Assist Devices IADs use computer control of motion to create functionality greater than that of conventional
Cobots http://cobot.com Michael Peshkin J. Edward Colgate Witaya Wannasuphoprasit ( Wit ) Intelligent Assist Devices IADs use computer control of motion to create functionality greater than that of conventional
Jacobian: Velocities and Static Forces 1/4
 Jacobian: Velocities and Static Forces /4 Advanced Robotic - MAE 6D - Department of Mechanical & Aerospace Engineering - UCLA Kinematics Relations - Joint & Cartesian Spaces A robot is often used to manipulate
Jacobian: Velocities and Static Forces /4 Advanced Robotic - MAE 6D - Department of Mechanical & Aerospace Engineering - UCLA Kinematics Relations - Joint & Cartesian Spaces A robot is often used to manipulate
Structural Configurations of Manipulators
 Structural Configurations of Manipulators 1 In this homework, I have given information about the basic structural configurations of the manipulators with the concerned illustrations. 1) The Manipulator
Structural Configurations of Manipulators 1 In this homework, I have given information about the basic structural configurations of the manipulators with the concerned illustrations. 1) The Manipulator
Jacobian: Velocities and Static Forces 1/4
 Jacobian: Velocities and Static Forces /4 Models of Robot Manipulation - EE 54 - Department of Electrical Engineering - University of Washington Kinematics Relations - Joint & Cartesian Spaces A robot
Jacobian: Velocities and Static Forces /4 Models of Robot Manipulation - EE 54 - Department of Electrical Engineering - University of Washington Kinematics Relations - Joint & Cartesian Spaces A robot
11. Kinematic models of contact Mechanics of Manipulation
 11. Kinematic models of contact Mechanics of Manipulation Matt Mason matt.mason@cs.cmu.edu http://www.cs.cmu.edu/~mason Carnegie Mellon Lecture 11. Mechanics of Manipulation p.1 Lecture 11. Kinematic models
11. Kinematic models of contact Mechanics of Manipulation Matt Mason matt.mason@cs.cmu.edu http://www.cs.cmu.edu/~mason Carnegie Mellon Lecture 11. Mechanics of Manipulation p.1 Lecture 11. Kinematic models
Kinematics - Introduction. Robotics. Kinematics - Introduction. Vladimír Smutný
 Kinematics - Introduction Robotics Kinematics - Introduction Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
Kinematics - Introduction Robotics Kinematics - Introduction Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
Robotics. SAAST Robotics Robot Arms
 SAAST Robotics 008 Robot Arms Vijay Kumar Professor of Mechanical Engineering and Applied Mechanics and Professor of Computer and Information Science University of Pennsylvania Topics Types of robot arms
SAAST Robotics 008 Robot Arms Vijay Kumar Professor of Mechanical Engineering and Applied Mechanics and Professor of Computer and Information Science University of Pennsylvania Topics Types of robot arms
Design of a Three-Axis Rotary Platform
 Design of a Three-Axis Rotary Platform William Mendez, Yuniesky Rodriguez, Lee Brady, Sabri Tosunoglu Mechanics and Materials Engineering, Florida International University 10555 W Flagler Street, Miami,
Design of a Three-Axis Rotary Platform William Mendez, Yuniesky Rodriguez, Lee Brady, Sabri Tosunoglu Mechanics and Materials Engineering, Florida International University 10555 W Flagler Street, Miami,
Spatial R-C-C-R Mechanism for a Single DOF Gripper
 NaCoMM-2009-ASMRL28 Spatial R-C-C-R Mechanism for a Single DOF Gripper Rajeev Lochana C.G * Mechanical Engineering Department Indian Institute of Technology Delhi, New Delhi, India * Email: rajeev@ar-cad.com
NaCoMM-2009-ASMRL28 Spatial R-C-C-R Mechanism for a Single DOF Gripper Rajeev Lochana C.G * Mechanical Engineering Department Indian Institute of Technology Delhi, New Delhi, India * Email: rajeev@ar-cad.com
Kinematics, Kinematics Chains CS 685
 Kinematics, Kinematics Chains CS 685 Previously Representation of rigid body motion Two different interpretations - as transformations between different coord. frames - as operators acting on a rigid body
Kinematics, Kinematics Chains CS 685 Previously Representation of rigid body motion Two different interpretations - as transformations between different coord. frames - as operators acting on a rigid body
SYNTHESIS AND RAPID PROTOTYPING OF MOTION FOR A FOUR-LEGGED MAMMAL-STRUCTURED ROBOT
 SYNTHESIS AND RAPID PROTOTYPING OF MOTION FOR A FOUR-LEGGED MAMMAL-STRUCTURED ROBOT Macie Tronacki* Industrial Research Institute for Automation and Measurements, Warsaw, Poland Corresponding author (mtronacki@piap.pl)
SYNTHESIS AND RAPID PROTOTYPING OF MOTION FOR A FOUR-LEGGED MAMMAL-STRUCTURED ROBOT Macie Tronacki* Industrial Research Institute for Automation and Measurements, Warsaw, Poland Corresponding author (mtronacki@piap.pl)
PPGEE Robot Dynamics I
 PPGEE Electrical Engineering Graduate Program UFMG April 2014 1 Introduction to Robotics 2 3 4 5 What is a Robot? According to RIA Robot Institute of America A Robot is a reprogrammable multifunctional
PPGEE Electrical Engineering Graduate Program UFMG April 2014 1 Introduction to Robotics 2 3 4 5 What is a Robot? According to RIA Robot Institute of America A Robot is a reprogrammable multifunctional
Dynamic Analysis of Manipulator Arm for 6-legged Robot
 American Journal of Mechanical Engineering, 2013, Vol. 1, No. 7, 365-369 Available online at http://pubs.sciepub.com/ajme/1/7/42 Science and Education Publishing DOI:10.12691/ajme-1-7-42 Dynamic Analysis
American Journal of Mechanical Engineering, 2013, Vol. 1, No. 7, 365-369 Available online at http://pubs.sciepub.com/ajme/1/7/42 Science and Education Publishing DOI:10.12691/ajme-1-7-42 Dynamic Analysis
Lecture 2: Kinematics of medical robotics
 ME 328: Medical Robotics Autumn 2016 Lecture 2: Kinematics of medical robotics Allison Okamura Stanford University kinematics The study of movement The branch of classical mechanics that describes the
ME 328: Medical Robotics Autumn 2016 Lecture 2: Kinematics of medical robotics Allison Okamura Stanford University kinematics The study of movement The branch of classical mechanics that describes the
2.007 Design and Manufacturing I Spring 2009
 MIT OpenCourseWare http://ocw.mit.edu 2.007 Design and Manufacturing I Spring 2009 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 2.007 Design and Manufacturing
MIT OpenCourseWare http://ocw.mit.edu 2.007 Design and Manufacturing I Spring 2009 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 2.007 Design and Manufacturing
An Interactive Software Environment for Gait Generation and Control Design of Sony Legged Robots
 An Interactive Software Environment for Gait Generation and Control Design of Sony Legged Robots Dragos Golubovic and Huosheng Hu Department of Computer Science, University of Essex, Colchester CO4 3SQ,
An Interactive Software Environment for Gait Generation and Control Design of Sony Legged Robots Dragos Golubovic and Huosheng Hu Department of Computer Science, University of Essex, Colchester CO4 3SQ,
Torque-Position Transformer for Task Control of Position Controlled Robots
 28 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-23, 28 Torque-Position Transformer for Task Control of Position Controlled Robots Oussama Khatib, 1 Peter Thaulad,
28 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-23, 28 Torque-Position Transformer for Task Control of Position Controlled Robots Oussama Khatib, 1 Peter Thaulad,
Exam in DD2426 Robotics and Autonomous Systems
 Exam in DD2426 Robotics and Autonomous Systems Lecturer: Patric Jensfelt KTH, March 16, 2010, 9-12 No aids are allowed on the exam, i.e. no notes, no books, no calculators, etc. You need a minimum of 20
Exam in DD2426 Robotics and Autonomous Systems Lecturer: Patric Jensfelt KTH, March 16, 2010, 9-12 No aids are allowed on the exam, i.e. no notes, no books, no calculators, etc. You need a minimum of 20
1498. End-effector vibrations reduction in trajectory tracking for mobile manipulator
 1498. End-effector vibrations reduction in trajectory tracking for mobile manipulator G. Pajak University of Zielona Gora, Faculty of Mechanical Engineering, Zielona Góra, Poland E-mail: g.pajak@iizp.uz.zgora.pl
1498. End-effector vibrations reduction in trajectory tracking for mobile manipulator G. Pajak University of Zielona Gora, Faculty of Mechanical Engineering, Zielona Góra, Poland E-mail: g.pajak@iizp.uz.zgora.pl
A sliding walk method for humanoid robots using ZMP feedback control
 A sliding walk method for humanoid robots using MP feedback control Satoki Tsuichihara, Masanao Koeda, Seiji Sugiyama, and Tsuneo oshikawa Abstract In this paper, we propose two methods for a highly stable
A sliding walk method for humanoid robots using MP feedback control Satoki Tsuichihara, Masanao Koeda, Seiji Sugiyama, and Tsuneo oshikawa Abstract In this paper, we propose two methods for a highly stable
1724. Mobile manipulators collision-free trajectory planning with regard to end-effector vibrations elimination
 1724. Mobile manipulators collision-free trajectory planning with regard to end-effector vibrations elimination Iwona Pajak 1, Grzegorz Pajak 2 University of Zielona Gora, Faculty of Mechanical Engineering,
1724. Mobile manipulators collision-free trajectory planning with regard to end-effector vibrations elimination Iwona Pajak 1, Grzegorz Pajak 2 University of Zielona Gora, Faculty of Mechanical Engineering,
Planning in Mobile Robotics
 Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
Robot mechanics and kinematics
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
Maintaining static stability and continuous motion in rough terrain hexapod locomotion without terrain mapping*
 24th Mediterranean Conference on Control and Automation (MED) June 21-24, 2016, Athens, Greece Maintaining static stability and continuous motion in rough terrain hexapod locomotion without terrain mapping*
24th Mediterranean Conference on Control and Automation (MED) June 21-24, 2016, Athens, Greece Maintaining static stability and continuous motion in rough terrain hexapod locomotion without terrain mapping*
Simultaneous Optimization of a Wheeled Mobile Robot Structure and a Control Parameter
 Fifth International Workshop on Computational Intelligence & Applications IEEE SMC Hiroshima Chapter, Hiroshima University, Japan, November 10, 11 & 12, 2009 Simultaneous Optimization of a Wheeled Mobile
Fifth International Workshop on Computational Intelligence & Applications IEEE SMC Hiroshima Chapter, Hiroshima University, Japan, November 10, 11 & 12, 2009 Simultaneous Optimization of a Wheeled Mobile
10/25/2018. Robotics and automation. Dr. Ibrahim Al-Naimi. Chapter two. Introduction To Robot Manipulators
 Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
The Mathematical Model and Computer Simulation of a Quadruped Robot
 Research Experience for Undergraduates 2014 Milwaukee School of Engineering National Science Foundation Grant June 1- August 8, 2014 The Mathematical Model and Computer Simulation of a Quadruped Robot
Research Experience for Undergraduates 2014 Milwaukee School of Engineering National Science Foundation Grant June 1- August 8, 2014 The Mathematical Model and Computer Simulation of a Quadruped Robot
Modeling of Humanoid Systems Using Deductive Approach
 INFOTEH-JAHORINA Vol. 12, March 2013. Modeling of Humanoid Systems Using Deductive Approach Miloš D Jovanović Robotics laboratory Mihailo Pupin Institute Belgrade, Serbia milos.jovanovic@pupin.rs Veljko
INFOTEH-JAHORINA Vol. 12, March 2013. Modeling of Humanoid Systems Using Deductive Approach Miloš D Jovanović Robotics laboratory Mihailo Pupin Institute Belgrade, Serbia milos.jovanovic@pupin.rs Veljko
IntroductionToRobotics-Lecture02
 IntroductionToRobotics-Lecture02 Instructor (Oussama Khatib):Okay. Let's get started. So as always, the lecture starts with a video segment, and today's video segment comes from 1991, and from the group
IntroductionToRobotics-Lecture02 Instructor (Oussama Khatib):Okay. Let's get started. So as always, the lecture starts with a video segment, and today's video segment comes from 1991, and from the group
Inverse Kinematics. Given a desired position (p) & orientation (R) of the end-effector
 & orientation (R) of the end-effector") Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Chapter 1: Introduction
 Chapter 1: Introduction This dissertation will describe the mathematical modeling and development of an innovative, three degree-of-freedom robotic manipulator. The new device, which has been named the
Chapter 1: Introduction This dissertation will describe the mathematical modeling and development of an innovative, three degree-of-freedom robotic manipulator. The new device, which has been named the
Modelling of mechanical system CREATING OF KINEMATIC CHAINS
 Modelling of mechanical system CREATING OF KINEMATIC CHAINS Mechanism Definitions 1. a system or structure of moving parts that performs some function 2. is each system reciprocally joined moveable bodies
Modelling of mechanical system CREATING OF KINEMATIC CHAINS Mechanism Definitions 1. a system or structure of moving parts that performs some function 2. is each system reciprocally joined moveable bodies
Autonomous and Mobile Robotics. Whole-body motion planning for humanoid robots (Slides prepared by Marco Cognetti) Prof.
 Prof.") Autonomous and Mobile Robotics Whole-body motion planning for humanoid robots (Slides prepared by Marco Cognetti) Prof. Giuseppe Oriolo Motivations task-constrained motion planning: find collision-free
Autonomous and Mobile Robotics Whole-body motion planning for humanoid robots (Slides prepared by Marco Cognetti) Prof. Giuseppe Oriolo Motivations task-constrained motion planning: find collision-free
Systèmes de locomotion hybrides roues-pattes
 Systèmes de locomotion hybrides roues-pattes ISIR UPMC Christophe Grand et Faïz Ben Amar 1/33 Plan 1. Introduction 2. Architecture mécatronique des robots Hylos 3. Modélisation cinémato-statique 4. Commande
Systèmes de locomotion hybrides roues-pattes ISIR UPMC Christophe Grand et Faïz Ben Amar 1/33 Plan 1. Introduction 2. Architecture mécatronique des robots Hylos 3. Modélisation cinémato-statique 4. Commande
Robotics Tasks. CS 188: Artificial Intelligence Spring Manipulator Robots. Mobile Robots. Degrees of Freedom. Sensors and Effectors
 CS 188: Artificial Intelligence Spring 2006 Lecture 5: Robot Motion Planning 1/31/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Motion planning (today) How to move from
CS 188: Artificial Intelligence Spring 2006 Lecture 5: Robot Motion Planning 1/31/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Motion planning (today) How to move from
Chapter 2 Kinematics of Mechanisms
 Chapter Kinematics of Mechanisms.1 Preamble Robot kinematics is the study of the motion (kinematics) of robotic mechanisms. In a kinematic analysis, the position, velocity, and acceleration of all the
Chapter Kinematics of Mechanisms.1 Preamble Robot kinematics is the study of the motion (kinematics) of robotic mechanisms. In a kinematic analysis, the position, velocity, and acceleration of all the
MEAM 520. Mobile Robots
 MEAM 520 Mobile Robots Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, Universit of Pennslvania Lecture 22: December 6, 2012 T
MEAM 520 Mobile Robots Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, Universit of Pennslvania Lecture 22: December 6, 2012 T
METR 4202: Advanced Control & Robotics
 Position & Orientation & State t home with Homogenous Transformations METR 4202: dvanced Control & Robotics Drs Surya Singh, Paul Pounds, and Hanna Kurniawati Lecture # 2 July 30, 2012 metr4202@itee.uq.edu.au
Position & Orientation & State t home with Homogenous Transformations METR 4202: dvanced Control & Robotics Drs Surya Singh, Paul Pounds, and Hanna Kurniawati Lecture # 2 July 30, 2012 metr4202@itee.uq.edu.au
Inverse Kinematics for Humanoid Robots using Artificial Neural Networks
 Inverse Kinematics for Humanoid Robots using Artificial Neural Networks Javier de Lope, Rafaela González-Careaga, Telmo Zarraonandia, and Darío Maravall Department of Artificial Intelligence Faculty of
Inverse Kinematics for Humanoid Robots using Artificial Neural Networks Javier de Lope, Rafaela González-Careaga, Telmo Zarraonandia, and Darío Maravall Department of Artificial Intelligence Faculty of
Introduction To Robotics (Kinematics, Dynamics, and Design)
") Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Robotics kinematics and Dynamics
 Robotics kinematics and Dynamics C. Sivakumar Assistant Professor Department of Mechanical Engineering BSA Crescent Institute of Science and Technology 1 Robot kinematics KINEMATICS the analytical study
Robotics kinematics and Dynamics C. Sivakumar Assistant Professor Department of Mechanical Engineering BSA Crescent Institute of Science and Technology 1 Robot kinematics KINEMATICS the analytical study
Modular robotics and locomotion Juan Gonzalez Gomez
 Modular robotics and locomotion Juan Gonzalez Gomez School of Engineering Universidad Autonoma de Madrid (Spain) Uni Hamburg. FB Informatik. AB TAMS. April 2006 Index Introduction to Modular robotics Starting
Modular robotics and locomotion Juan Gonzalez Gomez School of Engineering Universidad Autonoma de Madrid (Spain) Uni Hamburg. FB Informatik. AB TAMS. April 2006 Index Introduction to Modular robotics Starting
Bearing only visual servo control of a non-holonomic mobile robot. Robert Mahony
 Bearing only visual servo control of a non-holonomic mobile robot. Robert Mahony Department of Engineering, Australian National University, Australia. email: Robert.Mahony@anu.edu.au url: http://engnet.anu.edu.au/depeople/robert.mahony/
Bearing only visual servo control of a non-holonomic mobile robot. Robert Mahony Department of Engineering, Australian National University, Australia. email: Robert.Mahony@anu.edu.au url: http://engnet.anu.edu.au/depeople/robert.mahony/
Mobile Robotics. Competitions and Opportunities
 Mobile Robotics Administrivia Course web page: http://palantir.swarthmore.edu Syllabus, readings, homework, textbooks, handouts Textbooks: Probabilistic Robotics and Autonomous Mobile Robots Homework:
Mobile Robotics Administrivia Course web page: http://palantir.swarthmore.edu Syllabus, readings, homework, textbooks, handouts Textbooks: Probabilistic Robotics and Autonomous Mobile Robots Homework:
DETC WORKSPACE ANALYSIS FOR THE LIMBS OF A HEXAPEDAL ROBOT WALKING GAIT GENERATION ALGORITHM DEVELOPMENT
 Proceedings of the ASME 008 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 008 August 3-6, 008, Brooklyn, New York, USA DETC008-49615
Proceedings of the ASME 008 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 008 August 3-6, 008, Brooklyn, New York, USA DETC008-49615
Inverse Kinematics for Humanoid Robots Using Artificial Neural Networks
 Inverse Kinematics for Humanoid Robots Using Artificial Neural Networks Javier de Lope, Rafaela González-Careaga, Telmo Zarraonandia, and Darío Maravall Department of Artificial Intelligence Faculty of
Inverse Kinematics for Humanoid Robots Using Artificial Neural Networks Javier de Lope, Rafaela González-Careaga, Telmo Zarraonandia, and Darío Maravall Department of Artificial Intelligence Faculty of
COMPARISON OF ROBOT NAVIGATION METHODS USING PERFORMANCE METRICS
 COMPARISON OF ROBOT NAVIGATION METHODS USING PERFORMANCE METRICS Adriano Flores Dantas, Rodrigo Porfírio da Silva Sacchi, Valguima V. V. A. Odakura Faculdade de Ciências Exatas e Tecnologia (FACET) Universidade
COMPARISON OF ROBOT NAVIGATION METHODS USING PERFORMANCE METRICS Adriano Flores Dantas, Rodrigo Porfírio da Silva Sacchi, Valguima V. V. A. Odakura Faculdade de Ciências Exatas e Tecnologia (FACET) Universidade
Thomas Bräunl EMBEDDED ROBOTICS. Mobile Robot Design and Applications with Embedded Systems. Second Edition. With 233 Figures and 24 Tables.
 Thomas Bräunl EMBEDDED ROBOTICS Mobile Robot Design and Applications with Embedded Systems Second Edition With 233 Figures and 24 Tables Springer CONTENTS PART I: EMBEDDED SYSTEMS 1 Robots and Controllers
Thomas Bräunl EMBEDDED ROBOTICS Mobile Robot Design and Applications with Embedded Systems Second Edition With 233 Figures and 24 Tables Springer CONTENTS PART I: EMBEDDED SYSTEMS 1 Robots and Controllers
Mobile Robots: An Introduction.
 Mobile Robots: An Introduction Amirkabir University of Technology Computer Engineering & Information Technology Department http://ce.aut.ac.ir/~shiry/lecture/robotics-2004/robotics04.html Introduction
Mobile Robots: An Introduction Amirkabir University of Technology Computer Engineering & Information Technology Department http://ce.aut.ac.ir/~shiry/lecture/robotics-2004/robotics04.html Introduction
Cecilia Laschi The BioRobotics Institute Scuola Superiore Sant Anna, Pisa
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
MCE/EEC 647/747: Robot Dynamics and Control. Lecture 1: Introduction
 MCE/EEC 647/747: Robot Dynamics and Control Lecture 1: Introduction Reading: SHV Chapter 1 Robotics and Automation Handbook, Chapter 1 Assigned readings from several articles. Cleveland State University
MCE/EEC 647/747: Robot Dynamics and Control Lecture 1: Introduction Reading: SHV Chapter 1 Robotics and Automation Handbook, Chapter 1 Assigned readings from several articles. Cleveland State University