COMPM076 / GV07 - Introduction to Virtual Environments: Mixed Reality
|
|
|
- Brianne Logan
- 5 years ago
- Views:
Transcription

1 COMPM076 / GV07 - Introduction to Virtual Environments: Mixed Reality Simon Julier Department of Computer Science University College London
2 Structure Introduction Display Systems Tracking Systems Display Techniques Interaction Methods 2
3 Introduction Introduction Display Systems Tracking Systems Display Techniques Interaction Methods 3
4 Virtual Environments The focus of this module so far has been on developing virtual environments The user is surrounded by an entirely virtual world Objectives are to do things like induce immersion or presence However,VE is at just one end of the mixed reality continuum 4
5 The Mixed Reality Continuum 5
6 What is Mixed Reality? MR systems combine virtual and real objects 6

7 But This Includes Film Special Effects I, Robot 7
8 What is Mixed Reality? MR systems combine virtual and real objects They run interactively and in real time 8


9 But This Includes Heads Up Displays SportVUE MC1 Wireless Heads Up Display 9
10 What is Mixed Reality? MR systems combine virtual and real objects They run interactively and in real time They register (align) virtual and real objects with one another 10

11 The Ultimate MR System Augmented Reality, a New Way of Seeing, S. K. Feiner, Scientific American, April
12 World-Fixed vs. Camera-Fixed MR When we register with the environment, we have to know where the real world objects are Two types of MR system can be developed: World fixed Camera fixed 12

13 World-Fixed MR Application 13

14 Heads Up Display 14


15 Broadcasting racef/x by sportvision 15

16 Broadcasting 1st & ten by sportvision 16


17 Surveying Courtesy of Mark Francis, Topcon 17


18 Surveying Wide field of view camera Narrow field of view camera Captured image + overlays Topcon GPT-7000i 18


19 Surveying 19

20 Pre-visualisation 20

21 Synthetic Vision for UAVs

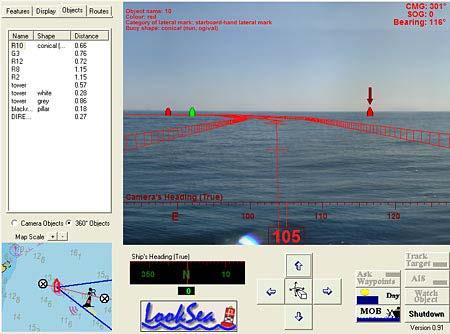
22 Navigation 22


23 Navigation Ruggedised pan tilt zoom camera Annotated video shown on bridge 23

24 Navigation 24

25 Advertising 25

26 Advertising 26

27 Location-Aware Information Layar 27

28 Camera-Fixed MR Application 28

29 Lego Digital Box 29

30 MR For Postage US Postal Service Virtual Box Simulator Demo 30

31 Mixed Reality and Games Consoles Eye of Judgement, Sony Computer Entertainment 31
32 Mobile AR Systems Tracking Display Interaction Interface 32
33 Challenges Posed by MR In some ways, MR is easier: Because it is anchored to the real world, tracking and navigation metaphors come for free However, because we are anchoring the graphics to the real world, other challenges arise: The type of display critically affects what can be shown The accuracy of the tracking system critically affects how well the real and virtual objects are registered The way in which the graphics interacts with the real world controls depth perception, etc. 33
34 Summary Mixed reality is a generalisation of VEs to incorporate both real and virtual objects Applications can be world-fixed or camera-fixed They are very widely used, even today The challenges for building good MR systems relate with how the virtual and real content interact 34
35 Display Systems Introduction Display Systems Tracking Systems Display Techniques Interaction Methods 35
36 Building an AR System Display 36
37 Display Systems There are several kinds of display technology which can be used which depend upon the application: Video see-through displays Optical see-through displays Projection displays

38 Video See-Through Display The scene is observed by a camera The graphics are overlaid on the video stream from the camera 38


39 Video See-Through HMDs 39


40 Mobile Phones Given the increase in memory and computational capability, together with handy built in cameras, mobile phones are now a major MR platform 40

41 Tablet-Based PC VisTracker and AR Demo courtesy of InterSense 41

42 Any Content Can be Inserted NRL Virtual Combat Trainer 42


43 For Example UNC Needle-Guided Biopsy Guided maintenance of equipment 43
44 Disadvantages of Video See Through Display Can only see part of real world collected by the camera Narrow field of view Low contrast If the power fails, you can t see anything! Focal length of device is fixed to distance of display Includes both real world and virtual objects at any depth 44
45 Optical See-Through Display Considered the gold standard A user wears a see-through head mounted display The real world and graphics are merged using some kind of optical combiner 45


46 Examples of See-Through HMDs 46
47 Advantages of Optical See-Through Displays The real world can be seen all the time Wide field of view High contrast High colour resolution If the display loses power, you can still see the real world 47

48 Optical See-Through Display 48

49 Optical See-Through Display 49


50 Graphics Can t Block Real World 50


51 Light Leakage is a Significant Problem 51

52 High-Powered Displays Partial Solution 52

53 Projective Displays User wears projector on head that casts images onto scene Reflection is visible 53


54 Projective HMD in Action 54


55 Advantages of Projective Displays Graphics overlaid directly, in terms of depth, with real world The tape can be used to occlude otherwise disruptive objects in the environment 55
56 Disadvantages of Projective Displays If power goes, everything goes Retroreflective tape has to be put everywhere you expect to see virtual content Since intensity falls with the square of distance, only nearby objects can be seen brightly 56
57 Projective MR EasyWeb Show Reel 57
58 Display Technology Summary Three main classes of displays can be used: Video see-through Optical see-through Projective All three have advantages and disadvantges Video see-through is probably the most widely researched and used: Simple Can overwrite any object in the scene 58
59 Tracking Systems Introduction Display Systems Tracking Systems Display Techniques Interaction Methods 59

60 ARToolKit The most widely used system Markers are 2D rectangles with distinctive patterns The pose of the pattern is computed relative to the camera 60
61 Tracking Systems To show the information to the user, we have to know where they are and where they are looking You might think we can get away with just a GPS and compass GPS gives position Compass gives orientation However, the performance can be pretty poor 61



62 GPS Causes Latency MARA, Nokia Nokia 6680 with add-on box containing GPS 62

63 Metal Causes Heading Errors NRL Battlefield Augmented Reality System 63

64 InterSense VisTracker Hybrid vision-inertial system Camera looks for special markers at low speed Inertial system measures velocity and acceleration at high speed Two are combined to give fast, accurate tracking InterSense VisTracker 64
65 Natural Marker-Based Systems Using artificial markers is a pain You have to physically install them on site You have to measure them to work out where they are You have to make sure that you put enough of them in that the tracker can see enough to compute the pose An alternative is to the unmodified environment Model-based Natural marker-based 65
66 Model-Based Tracking The system already knows the structure of all the key features in the environment it can track from The system therefore detects for model features in the frame These are associated with the model The camera pose is computed 66


67 Hybrid Model-Based Tracking System Camera MEMS IMU Interfacing and power! Going Out, G. Reitmayr and T. Drummond, Cambridge University 67


68 Hybrid Model-Based Tracking System Going Out, Gerhard Reitmayr and Tom Drummond, Cambridge University 68
69 SLAM-Based Tracking Developing models of the environment can be at least as difficult as using artificial markers Therefore, an alternative technique is to allow the system to detect and build a map of its own environment This approach is known as Simultaneous Localisation and Mapping (SLAM) 69

70 AR in Small Workspaces 70


71 Parallel Tracking and Mapping Parallel Tracking and Mapping, courtesy of Georg Klein and David Murray, University of Oxford


72 PTAM on an iphone Courtesy of Georg Klein and David Murray, University of Oxford 72


73 AR In Large Workspaces Mapping Large Loops with a Single Hand-Held Camera, L. Clemente and A. Davison and I. Reid and J. Neira and J. Tardos 73
74 Tracking System Summary Reliable and accurate tracking is important Wide-area tracking systems aren t good enough Hybrid and computer vision-based systems are in the works Global coverage is not here yet 74
75 Display Techniques Introduction Display Systems Tracking Systems Display Techniques Interaction Methods 75
76 Building an AR System Interface 76
77 User Interfaces To be of any use, the user has to understand the information which is being shown to them However, there are several issues we have to grapple with, including: Environmental effects Density of information Occlusions Unambiguous labelling 77

78 Annotation and Labelling One common issue is that we want to label the environment However, simple strategies like putting labels at centroids isn t good enough need to look at the screen space of objects 78
79 Labelling The Environment One approach is to use view management Keep track of where the 3D objects project onto the screen 2D annotations are laid out so that: They fit in or near the space of the object They do not interfere with one another The temporal placement of annotations is controlled using a finite state machine

80 Labelling the Environment Work out projection of objects onto display
81 Labelling the Environment Parameterise unoccupied space

82 Labelling the Environment The label location strategy is a finite state machine

83 Labelling the Environment Place annotations into free areas

84 Adaptive Label Management
85 Depth Estimation and Depth Ordering We often want to know the order or range of virtual objects relative to the environment Stereoscopic cues are of limited use Secondary cues tend to bias virtual object further away than real objects Various supplementary cues can be provided to convey depth information


86 Viewing Occluded Objects Threat Location Threat location User 86


87 X-Ray Vision Through Display Styles 87
88 Before 88

89 After 89


90 Developed Adaptation to Ambient Conditions Color of text is function of background over which it is drawn Algorithms identified by evaluation study at VaTech Therefore, the colour of the augmentation has to change based on scene composition Camera views scene Color and intensity processed to change label colors Camera


91 Developed Adaptation to Ambient Conditions Label ( Parking Lot ) changes color to contrast with background

92 Registration Errors Can Be Confusing 92

93 Reduce Effects by Adapting the Display Increasing registration error 93
![Bounding Regions for Objects y(k)= [ŷ(k), Y(k)] P M(k) = f(m 1 (x 1 (k)),,m t (x t (k))) x i (k)=[x ^ i (k), X i (k)] p p Screen Head World For each vertex in object: Project each vertex through](/docs-images/80/81676598/images/94-0.jpg "projection equations to work out pixel position Calculate mean and 1σ covariance ellipse due to registration errors Approximate ellipses by set of points Calculate bounding regions defined by these")
94 Bounding Regions for Objects y(k)= [ŷ(k), Y(k)] P M(k) = f(m 1 (x 1 (k)),,m t (x t (k))) x i (k)=[x ^ i (k), X i (k)] p p Screen Head World For each vertex in object: Project each vertex through projection equations to work out pixel position Calculate mean and 1σ covariance ellipse due to registration errors Approximate ellipses by set of points Calculate bounding regions defined by these ellipses
95 Registration Error Adaptation Target window Target designated 95

96 Registration Error Adaptation Error bounds Target window Target registration error region overlaps distracters 96
97 Registration Error Adaptation Calculate overlap of target and distracter error regions 97
98 Registration Error Adaptation targetobject is in the middle Add aggregate representation and text message 98

99 Dealing With Information Overload 99
100 Lots of Data is Extremely Confusing 100
101 Results 101
102 Interaction Methods Introduction Display Systems Tracking Systems Display Techniques Interaction Methods 102


103 Building an AR System Interaction Interface 103


104 Interaction 104

105 Heads Up Interaction What s that object? 105

106 Selection and Interaction 106
107 Multimodal Integrator Architecture Speech Recogniser Gesture Recogniser Weighted list of sentences Weighted list of selections Multimodal Integrator Object with highest probability 107

108 Example Multi-modal Interaction 108 Probabilistic Algorithms, Integration, and Empirical Evaluation for Disambiguating Multiple Selections in Frustum-Based Pointing, G. Schmidt et al.
109 Summary Many interaction challenges are the same as those in VE and the same techniques can be used Multi-modal interaction is one possibility which combined speech and gesture to support intuitive interaction 109
Real-time Video Annotations for Augmented Reality
 Real-time Video Annotations for Augmented Reality Edward Rosten, Gerhard Reitmayr and Tom Drummond Department of Engineering, University of Cambridge, Cambridge CB1 2PZ, UK {er258 gr281 twd20}@cam.ac.uk
Real-time Video Annotations for Augmented Reality Edward Rosten, Gerhard Reitmayr and Tom Drummond Department of Engineering, University of Cambridge, Cambridge CB1 2PZ, UK {er258 gr281 twd20}@cam.ac.uk
Video Analysis for Augmented and Mixed Reality. Kiyoshi Kiyokawa Osaka University
 Video Analysis for Augmented and Mixed Reality Kiyoshi Kiyokawa Osaka University Introduction Who am I? A researcher on AR / MR / VR / 3DUI / CSCW / Wearable Comp. Visualization / Wearable computing /
Video Analysis for Augmented and Mixed Reality Kiyoshi Kiyokawa Osaka University Introduction Who am I? A researcher on AR / MR / VR / 3DUI / CSCW / Wearable Comp. Visualization / Wearable computing /
Mixed-Reality for Intuitive Photo-Realistic 3D-Model Generation
 Mixed-Reality for Intuitive Photo-Realistic 3D-Model Generation Wolfgang Sepp, Tim Bodenmueller, Michael Suppa, and Gerd Hirzinger DLR, Institut für Robotik und Mechatronik @ GI-Workshop VR/AR 2009 Folie
Mixed-Reality for Intuitive Photo-Realistic 3D-Model Generation Wolfgang Sepp, Tim Bodenmueller, Michael Suppa, and Gerd Hirzinger DLR, Institut für Robotik und Mechatronik @ GI-Workshop VR/AR 2009 Folie
Hybrids Mixed Approaches
 Hybrids Mixed Approaches Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why mixing? Parallel Tracking and Mapping Benefits
Hybrids Mixed Approaches Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why mixing? Parallel Tracking and Mapping Benefits
Alignment of Stereoscopic 3D Cameras to Real World Controls
 Alignment of Stereoscopic 3D Cameras to Real World Controls John T Murray 1156 High Street Santa Cruz, CA lucid@soe.ucsc.edu Abstract Augmented reality has recently become more affordable and accessible
Alignment of Stereoscopic 3D Cameras to Real World Controls John T Murray 1156 High Street Santa Cruz, CA lucid@soe.ucsc.edu Abstract Augmented reality has recently become more affordable and accessible
A Stereo Vision-based Mixed Reality System with Natural Feature Point Tracking
 A Stereo Vision-based Mixed Reality System with Natural Feature Point Tracking Masayuki Kanbara y, Hirofumi Fujii z, Haruo Takemura y and Naokazu Yokoya y ygraduate School of Information Science, Nara
A Stereo Vision-based Mixed Reality System with Natural Feature Point Tracking Masayuki Kanbara y, Hirofumi Fujii z, Haruo Takemura y and Naokazu Yokoya y ygraduate School of Information Science, Nara
Binocular cues to depth PSY 310 Greg Francis. Lecture 21. Depth perception
 Binocular cues to depth PSY 310 Greg Francis Lecture 21 How to find the hidden word. Depth perception You can see depth in static images with just one eye (monocular) Pictorial cues However, motion and
Binocular cues to depth PSY 310 Greg Francis Lecture 21 How to find the hidden word. Depth perception You can see depth in static images with just one eye (monocular) Pictorial cues However, motion and
Live Metric 3D Reconstruction on Mobile Phones ICCV 2013
 Live Metric 3D Reconstruction on Mobile Phones ICCV 2013 Main Contents 1. Target & Related Work 2. Main Features of This System 3. System Overview & Workflow 4. Detail of This System 5. Experiments 6.
Live Metric 3D Reconstruction on Mobile Phones ICCV 2013 Main Contents 1. Target & Related Work 2. Main Features of This System 3. System Overview & Workflow 4. Detail of This System 5. Experiments 6.
Monocular Visual Odometry
 Elective in Robotics coordinator: Prof. Giuseppe Oriolo Monocular Visual Odometry (slides prepared by Luca Ricci) Monocular vs. Stereo: eamples from Nature Predator Predators eyes face forward. The field
Elective in Robotics coordinator: Prof. Giuseppe Oriolo Monocular Visual Odometry (slides prepared by Luca Ricci) Monocular vs. Stereo: eamples from Nature Predator Predators eyes face forward. The field
Shadows in the graphics pipeline
 Shadows in the graphics pipeline Steve Marschner Cornell University CS 569 Spring 2008, 19 February There are a number of visual cues that help let the viewer know about the 3D relationships between objects
Shadows in the graphics pipeline Steve Marschner Cornell University CS 569 Spring 2008, 19 February There are a number of visual cues that help let the viewer know about the 3D relationships between objects
DAVOOD RASTI ALIREZA RASTI AUGMENTED REALITY FRAMEWORK AND DEMONSTRATOR. Master of Science Thesis
 DAVOOD RASTI ALIREZA RASTI AUGMENTED REALITY FRAMEWORK AND DEMONSTRATOR Master of Science Thesis Examiners: Adjunct Prof. Pekka Jääskeläinen and Timo Viitanen, MSc Examiner and topic approved on 1 st of
DAVOOD RASTI ALIREZA RASTI AUGMENTED REALITY FRAMEWORK AND DEMONSTRATOR Master of Science Thesis Examiners: Adjunct Prof. Pekka Jääskeläinen and Timo Viitanen, MSc Examiner and topic approved on 1 st of
Robotics. Lecture 7: Simultaneous Localisation and Mapping (SLAM)
") Robotics Lecture 7: Simultaneous Localisation and Mapping (SLAM) See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College
Robotics Lecture 7: Simultaneous Localisation and Mapping (SLAM) See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College
Here s the general problem we want to solve efficiently: Given a light and a set of pixels in view space, resolve occlusion between each pixel and
 1 Here s the general problem we want to solve efficiently: Given a light and a set of pixels in view space, resolve occlusion between each pixel and the light. 2 To visualize this problem, consider the
1 Here s the general problem we want to solve efficiently: Given a light and a set of pixels in view space, resolve occlusion between each pixel and the light. 2 To visualize this problem, consider the
Real time video annotations for augmented reality. Ed Rosten, Dr. Gerhard Reitmayr, Dr. Tom Drummond
 Real time video annotations for augmented reality Ed Rosten, Dr. Gerhard Reitmayr, Dr. Tom Drummond Label Placement Sreen stabilized labels Object labels (nearby with follower lines) Label placement in
Real time video annotations for augmented reality Ed Rosten, Dr. Gerhard Reitmayr, Dr. Tom Drummond Label Placement Sreen stabilized labels Object labels (nearby with follower lines) Label placement in
Enhancing Traditional Rasterization Graphics with Ray Tracing. October 2015
 Enhancing Traditional Rasterization Graphics with Ray Tracing October 2015 James Rumble Developer Technology Engineer, PowerVR Graphics Overview Ray Tracing Fundamentals PowerVR Ray Tracing Pipeline Using
Enhancing Traditional Rasterization Graphics with Ray Tracing October 2015 James Rumble Developer Technology Engineer, PowerVR Graphics Overview Ray Tracing Fundamentals PowerVR Ray Tracing Pipeline Using
A Mobile Augmented Reality Demonstrator. Andrew Radburn 1
 A Mobile Augmented Reality Demonstrator Andrew Radburn 1 1 Ordnance Survey, Romsey Road, Southampton SO16 4GU, UK Tel. (+44 2380 792000) Fax (+44 2380 792000) Andrew.Radburn@ordnancesurvey.co.uk http://www.ordnancesurvey.co.uk
A Mobile Augmented Reality Demonstrator Andrew Radburn 1 1 Ordnance Survey, Romsey Road, Southampton SO16 4GU, UK Tel. (+44 2380 792000) Fax (+44 2380 792000) Andrew.Radburn@ordnancesurvey.co.uk http://www.ordnancesurvey.co.uk
MR-Mirror: A Complex of Real and Virtual Mirrors
 MR-Mirror: A Complex of Real and Virtual Mirrors Hideaki Sato 1, Itaru Kitahara 1, and Yuichi Ohta 1 1 Department of Intelligent Interaction Technologies, Graduate School of Systems and Information Engineering,
MR-Mirror: A Complex of Real and Virtual Mirrors Hideaki Sato 1, Itaru Kitahara 1, and Yuichi Ohta 1 1 Department of Intelligent Interaction Technologies, Graduate School of Systems and Information Engineering,
A Wearable Augmented Reality System Using an IrDA Device and a Passometer
 A Wearable Augmented Reality System Using an IrDA Device and a Passometer Ryuhei Tenmoku a Masayuki Kanbara a and Naokazu Yokoya a a Graduate School of Information Science, Nara Institute of Science and
A Wearable Augmented Reality System Using an IrDA Device and a Passometer Ryuhei Tenmoku a Masayuki Kanbara a and Naokazu Yokoya a a Graduate School of Information Science, Nara Institute of Science and
Shadow Rendering EDA101 Advanced Shading and Rendering
 Shadow Rendering EDA101 Advanced Shading and Rendering 2006 Tomas Akenine-Möller 1 Why, oh why? (1) Shadows provide cues about spatial relationships among objects 2006 Tomas Akenine-Möller 2 Why, oh why?
Shadow Rendering EDA101 Advanced Shading and Rendering 2006 Tomas Akenine-Möller 1 Why, oh why? (1) Shadows provide cues about spatial relationships among objects 2006 Tomas Akenine-Möller 2 Why, oh why?
Multimedia Technology CHAPTER 4. Video and Animation
 CHAPTER 4 Video and Animation - Both video and animation give us a sense of motion. They exploit some properties of human eye s ability of viewing pictures. - Motion video is the element of multimedia
CHAPTER 4 Video and Animation - Both video and animation give us a sense of motion. They exploit some properties of human eye s ability of viewing pictures. - Motion video is the element of multimedia
Viewing. Part II (The Synthetic Camera) CS123 INTRODUCTION TO COMPUTER GRAPHICS. Andries van Dam 10/10/2017 1/31
 CS123 INTRODUCTION TO COMPUTER GRAPHICS. Andries van Dam 10/10/2017 1/31") Viewing Part II (The Synthetic Camera) Brownie camera courtesy of http://www.geh.org/fm/brownie2/htmlsrc/me13000034_ful.html 1/31 The Camera and the Scene } What does a camera do? } Takes in a 3D scene
Viewing Part II (The Synthetic Camera) Brownie camera courtesy of http://www.geh.org/fm/brownie2/htmlsrc/me13000034_ful.html 1/31 The Camera and the Scene } What does a camera do? } Takes in a 3D scene
Probabilistic Tracking and Reconstruction of 3D Human Motion in Monocular Video Sequences
 Probabilistic Tracking and Reconstruction of 3D Human Motion in Monocular Video Sequences Presentation of the thesis work of: Hedvig Sidenbladh, KTH Thesis opponent: Prof. Bill Freeman, MIT Thesis supervisors
Probabilistic Tracking and Reconstruction of 3D Human Motion in Monocular Video Sequences Presentation of the thesis work of: Hedvig Sidenbladh, KTH Thesis opponent: Prof. Bill Freeman, MIT Thesis supervisors
instantreality Industrial Applications developed within the Mixed Reality Framework
 instantreality Dr. Uli Bockholt Virtual and Augmented Reality ISMAR 2008 15. September 2008 + Synopsis Outline Requirements in Industrial Projects Robust and Markerless Tracking Augmented Reality on Embedded
instantreality Dr. Uli Bockholt Virtual and Augmented Reality ISMAR 2008 15. September 2008 + Synopsis Outline Requirements in Industrial Projects Robust and Markerless Tracking Augmented Reality on Embedded
User Interface Engineering HS 2013
 User Interface Engineering HS 2013 Augmented Reality Part I Introduction, Definitions, Application Areas ETH Zürich Departement Computer Science User Interface Engineering HS 2013 Prof. Dr. Otmar Hilliges
User Interface Engineering HS 2013 Augmented Reality Part I Introduction, Definitions, Application Areas ETH Zürich Departement Computer Science User Interface Engineering HS 2013 Prof. Dr. Otmar Hilliges
Overview. Augmented reality and applications Marker-based augmented reality. Camera model. Binary markers Textured planar markers
 Augmented reality Overview Augmented reality and applications Marker-based augmented reality Binary markers Textured planar markers Camera model Homography Direct Linear Transformation What is augmented
Augmented reality Overview Augmented reality and applications Marker-based augmented reality Binary markers Textured planar markers Camera model Homography Direct Linear Transformation What is augmented
Graphics Hardware and Display Devices
 Graphics Hardware and Display Devices CSE328 Lectures Graphics/Visualization Hardware Many graphics/visualization algorithms can be implemented efficiently and inexpensively in hardware Facilitates interactive
Graphics Hardware and Display Devices CSE328 Lectures Graphics/Visualization Hardware Many graphics/visualization algorithms can be implemented efficiently and inexpensively in hardware Facilitates interactive
Occlusion Detection of Real Objects using Contour Based Stereo Matching
 Occlusion Detection of Real Objects using Contour Based Stereo Matching Kenichi Hayashi, Hirokazu Kato, Shogo Nishida Graduate School of Engineering Science, Osaka University,1-3 Machikaneyama-cho, Toyonaka,
Occlusion Detection of Real Objects using Contour Based Stereo Matching Kenichi Hayashi, Hirokazu Kato, Shogo Nishida Graduate School of Engineering Science, Osaka University,1-3 Machikaneyama-cho, Toyonaka,
Augmented and Mixed Reality
 Augmented and Mixed Reality Uma Mudenagudi Dept. of Computer Science and Engineering, Indian Institute of Technology Delhi Outline Introduction to Augmented Reality(AR) and Mixed Reality(MR) A Typical
Augmented and Mixed Reality Uma Mudenagudi Dept. of Computer Science and Engineering, Indian Institute of Technology Delhi Outline Introduction to Augmented Reality(AR) and Mixed Reality(MR) A Typical
On-line and Off-line 3D Reconstruction for Crisis Management Applications
 On-line and Off-line 3D Reconstruction for Crisis Management Applications Geert De Cubber Royal Military Academy, Department of Mechanical Engineering (MSTA) Av. de la Renaissance 30, 1000 Brussels geert.de.cubber@rma.ac.be
On-line and Off-line 3D Reconstruction for Crisis Management Applications Geert De Cubber Royal Military Academy, Department of Mechanical Engineering (MSTA) Av. de la Renaissance 30, 1000 Brussels geert.de.cubber@rma.ac.be
Information Visualization. Overview. What is Information Visualization? SMD157 Human-Computer Interaction Fall 2003
 INSTITUTIONEN FÖR SYSTEMTEKNIK LULEÅ TEKNISKA UNIVERSITET Information Visualization SMD157 Human-Computer Interaction Fall 2003 Dec-1-03 SMD157, Information Visualization 1 L Overview What is information
INSTITUTIONEN FÖR SYSTEMTEKNIK LULEÅ TEKNISKA UNIVERSITET Information Visualization SMD157 Human-Computer Interaction Fall 2003 Dec-1-03 SMD157, Information Visualization 1 L Overview What is information
the recording of an activity by a participant in the activity, typically by way of small wearable or portable personal technologies
 Sousveillance the recording of an activity by a participant in the activity, typically by way of small wearable or portable personal technologies coined by Steve Mann stems from the contrasting French
Sousveillance the recording of an activity by a participant in the activity, typically by way of small wearable or portable personal technologies coined by Steve Mann stems from the contrasting French
Fusing Sensors into Mobile Operating Systems & Innovative Use Cases
 Fusing Sensors into Mobile Operating Systems & Innovative Use Cases May 23, 2012 Tristan Joo (tristanjoo@wca.org) Board Director & Co-Chair of Mobile SIG Wireless Communications Alliance, Independent Executive
Fusing Sensors into Mobile Operating Systems & Innovative Use Cases May 23, 2012 Tristan Joo (tristanjoo@wca.org) Board Director & Co-Chair of Mobile SIG Wireless Communications Alliance, Independent Executive
VISGIS: Dynamic Situated Visualization for Geographic Information Systems
 VISGIS: Dynamic Situated Visualization for Geographic Information Systems Stefanie Zollmann Department of Computer Science University of Otago Dunedin, New Zealand Email: stefanie@cs.otago.ac.nz Christian
VISGIS: Dynamic Situated Visualization for Geographic Information Systems Stefanie Zollmann Department of Computer Science University of Otago Dunedin, New Zealand Email: stefanie@cs.otago.ac.nz Christian
Advanced Imaging Applications on Smart-phones Convergence of General-purpose computing, Graphics acceleration, and Sensors
 Advanced Imaging Applications on Smart-phones Convergence of General-purpose computing, Graphics acceleration, and Sensors Sriram Sethuraman Technologist & DMTS, Ittiam 1 Overview Imaging on Smart-phones
Advanced Imaging Applications on Smart-phones Convergence of General-purpose computing, Graphics acceleration, and Sensors Sriram Sethuraman Technologist & DMTS, Ittiam 1 Overview Imaging on Smart-phones
Reality Modeling Drone Capture Guide
 Reality Modeling Drone Capture Guide Discover the best practices for photo acquisition-leveraging drones to create 3D reality models with ContextCapture, Bentley s reality modeling software. Learn the
Reality Modeling Drone Capture Guide Discover the best practices for photo acquisition-leveraging drones to create 3D reality models with ContextCapture, Bentley s reality modeling software. Learn the
COS Lecture 10 Autonomous Robot Navigation
 COS 495 - Lecture 10 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 10 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Robert Collins CSE486, Penn State Lecture 08: Introduction to Stereo
 Lecture 08: Introduction to Stereo Reading: T&V Section 7.1 Stereo Vision Inferring depth from images taken at the same time by two or more cameras. Basic Perspective Projection Scene Point Perspective
Lecture 08: Introduction to Stereo Reading: T&V Section 7.1 Stereo Vision Inferring depth from images taken at the same time by two or more cameras. Basic Perspective Projection Scene Point Perspective
AN INTERACTIVE VIRTUAL MANUAL IN AUGMENTED REALITY QIUHUA DING THESIS
 c 2017 Qiuhua Ding AN INTERACTIVE VIRTUAL MANUAL IN AUGMENTED REALITY BY QIUHUA DING THESIS Submitted in partial fulfillment of the requirements for the degree of Master of Science in Computer Science
c 2017 Qiuhua Ding AN INTERACTIVE VIRTUAL MANUAL IN AUGMENTED REALITY BY QIUHUA DING THESIS Submitted in partial fulfillment of the requirements for the degree of Master of Science in Computer Science
5/14/2018. Experiences with AR and AI in development projects. Agenda. By: Sune Wolff, CTO & Partner at Unity Studios.
 Experiences with AR and AI in development projects By: Sune Wolff, CTO & Partner at Unity Studios Agenda 1 Introduction 2 3 AR and AI: Mutually Beneficial Technologies 4 Presentation of Cases and Experiences
Experiences with AR and AI in development projects By: Sune Wolff, CTO & Partner at Unity Studios Agenda 1 Introduction 2 3 AR and AI: Mutually Beneficial Technologies 4 Presentation of Cases and Experiences
cse 252c Fall 2004 Project Report: A Model of Perpendicular Texture for Determining Surface Geometry
 cse 252c Fall 2004 Project Report: A Model of Perpendicular Texture for Determining Surface Geometry Steven Scher December 2, 2004 Steven Scher SteveScher@alumni.princeton.edu Abstract Three-dimensional
cse 252c Fall 2004 Project Report: A Model of Perpendicular Texture for Determining Surface Geometry Steven Scher December 2, 2004 Steven Scher SteveScher@alumni.princeton.edu Abstract Three-dimensional
Prof. Feng Liu. Spring /27/2014
 Prof. Feng Liu Spring 2014 http://www.cs.pdx.edu/~fliu/courses/cs510/ 05/27/2014 Last Time Video Stabilization 2 Today Stereoscopic 3D Human depth perception 3D displays 3 Stereoscopic media Digital Visual
Prof. Feng Liu Spring 2014 http://www.cs.pdx.edu/~fliu/courses/cs510/ 05/27/2014 Last Time Video Stabilization 2 Today Stereoscopic 3D Human depth perception 3D displays 3 Stereoscopic media Digital Visual
Prof. Fanny Ficuciello Robotics for Bioengineering Visual Servoing
 Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
An image to map loop closing method for monocular SLAM
 An image to map loop closing method for monocular SLAM Brian Williams, Mark Cummins, José Neira, Paul Newman, Ian Reid and Juan Tardós Universidad de Zaragoza, Spain University of Oxford, UK Abstract In
An image to map loop closing method for monocular SLAM Brian Williams, Mark Cummins, José Neira, Paul Newman, Ian Reid and Juan Tardós Universidad de Zaragoza, Spain University of Oxford, UK Abstract In
I N T R O D U C T I O N T O C O M P U T E R G R A P H I C S
 3D Viewing: the Synthetic Camera Programmer s reference model for specifying 3D view projection parameters to the computer General synthetic camera (e.g., PHIGS Camera, Computer Graphics: Principles and
3D Viewing: the Synthetic Camera Programmer s reference model for specifying 3D view projection parameters to the computer General synthetic camera (e.g., PHIGS Camera, Computer Graphics: Principles and
EECS 487: Interactive Computer Graphics
 Ray Tracing EECS 487: Interactive Computer Graphics Lecture 29: Distributed Ray Tracing Introduction and context ray casting Recursive ray tracing shadows reflection refraction Ray tracing implementation
Ray Tracing EECS 487: Interactive Computer Graphics Lecture 29: Distributed Ray Tracing Introduction and context ray casting Recursive ray tracing shadows reflection refraction Ray tracing implementation
CS595:Introduction to Computer Vision
 CS595:Introduction to Computer Vision Instructor: Qi Li Instructor Course syllabus E-mail: qi.li@cs.wku.edu Office: TCCW 135 Office hours MW: 9:00-10:00, 15:00-16:00 T: 9:00-12:00, 14:00-16:00 F: 9:00-10:00
CS595:Introduction to Computer Vision Instructor: Qi Li Instructor Course syllabus E-mail: qi.li@cs.wku.edu Office: TCCW 135 Office hours MW: 9:00-10:00, 15:00-16:00 T: 9:00-12:00, 14:00-16:00 F: 9:00-10:00
MULTI-MODAL MAPPING. Robotics Day, 31 Mar Frank Mascarich, Shehryar Khattak, Tung Dang
 MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
Reading on the Accumulation Buffer: Motion Blur, Anti-Aliasing, and Depth of Field
 Reading on the Accumulation Buffer: Motion Blur, Anti-Aliasing, and Depth of Field 1 The Accumulation Buffer There are a number of effects that can be achieved if you can draw a scene more than once. You
Reading on the Accumulation Buffer: Motion Blur, Anti-Aliasing, and Depth of Field 1 The Accumulation Buffer There are a number of effects that can be achieved if you can draw a scene more than once. You
Improved Navigated Spine Surgery Utilizing Augmented Reality Visualization
 Improved Navigated Spine Surgery Utilizing Augmented Reality Visualization Zein Salah 1,2, Bernhard Preim 1, Erck Elolf 3, Jörg Franke 4, Georg Rose 2 1Department of Simulation and Graphics, University
Improved Navigated Spine Surgery Utilizing Augmented Reality Visualization Zein Salah 1,2, Bernhard Preim 1, Erck Elolf 3, Jörg Franke 4, Georg Rose 2 1Department of Simulation and Graphics, University
Active Stereo Vision. COMP 4900D Winter 2012 Gerhard Roth
 Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
Global Smartphone 3D Sensing Market: Size, Trends & Forecasts ( ) September 2017
 September 2017") Global Smartphone 3D Sensing Market: Size, Trends & Forecasts (2017-2021) September 2017 Global Smartphone 3D Sensing Market Report Scope of the Report The report entitled Global Smartphone 3D Sensing
Global Smartphone 3D Sensing Market: Size, Trends & Forecasts (2017-2021) September 2017 Global Smartphone 3D Sensing Market Report Scope of the Report The report entitled Global Smartphone 3D Sensing
Computer graphics 2: Graduate seminar in computational aesthetics
 Computer graphics 2: Graduate seminar in computational aesthetics Angus Forbes evl.uic.edu/creativecoding/cs526 Computer Graphics 2 instructor angus graeme forbes course syllabus http://evl.uic.edu/creativecoding/cs526
Computer graphics 2: Graduate seminar in computational aesthetics Angus Forbes evl.uic.edu/creativecoding/cs526 Computer Graphics 2 instructor angus graeme forbes course syllabus http://evl.uic.edu/creativecoding/cs526
Lecture 14: Computer Vision
 CS/b: Artificial Intelligence II Prof. Olga Veksler Lecture : Computer Vision D shape from Images Stereo Reconstruction Many Slides are from Steve Seitz (UW), S. Narasimhan Outline Cues for D shape perception
CS/b: Artificial Intelligence II Prof. Olga Veksler Lecture : Computer Vision D shape from Images Stereo Reconstruction Many Slides are from Steve Seitz (UW), S. Narasimhan Outline Cues for D shape perception
Jakob Engel, Thomas Schöps, Daniel Cremers Technical University Munich. LSD-SLAM: Large-Scale Direct Monocular SLAM
 Computer Vision Group Technical University of Munich Jakob Engel LSD-SLAM: Large-Scale Direct Monocular SLAM Jakob Engel, Thomas Schöps, Daniel Cremers Technical University Munich Monocular Video Engel,
Computer Vision Group Technical University of Munich Jakob Engel LSD-SLAM: Large-Scale Direct Monocular SLAM Jakob Engel, Thomas Schöps, Daniel Cremers Technical University Munich Monocular Video Engel,
Computer Graphics Introduction. Taku Komura
 Computer Graphics Introduction Taku Komura What s this course all about? We will cover Graphics programming and algorithms Graphics data structures Applied geometry, modeling and rendering Not covering
Computer Graphics Introduction Taku Komura What s this course all about? We will cover Graphics programming and algorithms Graphics data structures Applied geometry, modeling and rendering Not covering
3D Face and Hand Tracking for American Sign Language Recognition
 3D Face and Hand Tracking for American Sign Language Recognition NSF-ITR (2004-2008) D. Metaxas, A. Elgammal, V. Pavlovic (Rutgers Univ.) C. Neidle (Boston Univ.) C. Vogler (Gallaudet) The need for automated
3D Face and Hand Tracking for American Sign Language Recognition NSF-ITR (2004-2008) D. Metaxas, A. Elgammal, V. Pavlovic (Rutgers Univ.) C. Neidle (Boston Univ.) C. Vogler (Gallaudet) The need for automated
Image processing and features
 Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Hidden View Synthesis using Real-Time Visual SLAM for Simplifying Video Surveillance Analysis
 2011 IEEE International Conference on Robotics and Automation Shanghai International Conference Center May 9-13, 2011, Shanghai, China Hidden View Synthesis using Real-Time Visual SLAM for Simplifying
2011 IEEE International Conference on Robotics and Automation Shanghai International Conference Center May 9-13, 2011, Shanghai, China Hidden View Synthesis using Real-Time Visual SLAM for Simplifying
Low Latency Rendering and Positioning for Mobile Augmented Reality
 Low Latency Rendering and Positioning for Mobile Augmented Reality W. Pasman, A. van der Schaaf, R.L. Lagendijk, F.W. Jansen Ubicom-project, Faculty of Information Technology and Systems Delft University
Low Latency Rendering and Positioning for Mobile Augmented Reality W. Pasman, A. van der Schaaf, R.L. Lagendijk, F.W. Jansen Ubicom-project, Faculty of Information Technology and Systems Delft University
Augmenting Reality, Naturally:
 Augmenting Reality, Naturally: Scene Modelling, Recognition and Tracking with Invariant Image Features by Iryna Gordon in collaboration with David G. Lowe Laboratory for Computational Intelligence Department
Augmenting Reality, Naturally: Scene Modelling, Recognition and Tracking with Invariant Image Features by Iryna Gordon in collaboration with David G. Lowe Laboratory for Computational Intelligence Department
POME A mobile camera system for accurate indoor pose
 POME A mobile camera system for accurate indoor pose Paul Montgomery & Andreas Winter November 2 2016 2010. All rights reserved. 1 ICT Intelligent Construction Tools A 50-50 joint venture between Trimble
POME A mobile camera system for accurate indoor pose Paul Montgomery & Andreas Winter November 2 2016 2010. All rights reserved. 1 ICT Intelligent Construction Tools A 50-50 joint venture between Trimble
Computer Animation and Visualisation. Lecture 3. Motion capture and physically-based animation of characters
 Computer Animation and Visualisation Lecture 3. Motion capture and physically-based animation of characters Character Animation There are three methods Create them manually Use real human / animal motions
Computer Animation and Visualisation Lecture 3. Motion capture and physically-based animation of characters Character Animation There are three methods Create them manually Use real human / animal motions
Virtual Environments: System Architectures
 Virtual Environments: System Architectures Anthony Steed Simon Julier Department of Computer Science University College London http://www.cs.ucl.ac.uk/teaching/ve Outline Problem Statement Representing
Virtual Environments: System Architectures Anthony Steed Simon Julier Department of Computer Science University College London http://www.cs.ucl.ac.uk/teaching/ve Outline Problem Statement Representing
Representing Moving Images with Layers. J. Y. Wang and E. H. Adelson MIT Media Lab
 Representing Moving Images with Layers J. Y. Wang and E. H. Adelson MIT Media Lab Goal Represent moving images with sets of overlapping layers Layers are ordered in depth and occlude each other Velocity
Representing Moving Images with Layers J. Y. Wang and E. H. Adelson MIT Media Lab Goal Represent moving images with sets of overlapping layers Layers are ordered in depth and occlude each other Velocity
Vision-Based Registration for Augmented Reality with Integration of Arbitrary Multiple Planes
 Vision-Based Registration for Augmented Reality with Integration of Arbitrary Multiple Planes Yuo Uematsu and Hideo Saito Keio University, Dept. of Information and Computer Science, Yoohama, Japan {yu-o,
Vision-Based Registration for Augmented Reality with Integration of Arbitrary Multiple Planes Yuo Uematsu and Hideo Saito Keio University, Dept. of Information and Computer Science, Yoohama, Japan {yu-o,
Augmented Reality platform for enhancing integration of virtual objects
 Augmented Reality platform for enhancing integration of virtual objects Mohamed El-Zayat Faculty of Electrical Engineering, Sarajevo Bosnia and Herzegovina Abstract With the wide spread of high end processors
Augmented Reality platform for enhancing integration of virtual objects Mohamed El-Zayat Faculty of Electrical Engineering, Sarajevo Bosnia and Herzegovina Abstract With the wide spread of high end processors
The Ultimate Display
 1 User Interfaces for Mobile and Wearable Computing Augmented Reality 2 COMS E6176 Prof. Feiner Columbia University April 22, 2004 The Ultimate Display The ultimate display would, of course, be a room
1 User Interfaces for Mobile and Wearable Computing Augmented Reality 2 COMS E6176 Prof. Feiner Columbia University April 22, 2004 The Ultimate Display The ultimate display would, of course, be a room
S U N G - E U I YO O N, K A I S T R E N D E R I N G F R E E LY A VA I L A B L E O N T H E I N T E R N E T
 S U N G - E U I YO O N, K A I S T R E N D E R I N G F R E E LY A VA I L A B L E O N T H E I N T E R N E T Copyright 2018 Sung-eui Yoon, KAIST freely available on the internet http://sglab.kaist.ac.kr/~sungeui/render
S U N G - E U I YO O N, K A I S T R E N D E R I N G F R E E LY A VA I L A B L E O N T H E I N T E R N E T Copyright 2018 Sung-eui Yoon, KAIST freely available on the internet http://sglab.kaist.ac.kr/~sungeui/render
Augmented reality with the ARToolKit FMA175 version 1.3 Supervisor Petter Strandmark By Olle Landin
 Augmented reality with the ARToolKit FMA75 version.3 Supervisor Petter Strandmark By Olle Landin Ic7ol3@student.lth.se Introduction Agumented Reality (AR) is the overlay of virtual computer graphics images
Augmented reality with the ARToolKit FMA75 version.3 Supervisor Petter Strandmark By Olle Landin Ic7ol3@student.lth.se Introduction Agumented Reality (AR) is the overlay of virtual computer graphics images
15 Years of Visual SLAM
 15 Years of Visual SLAM Andrew Davison Robot Vision Group and Dyson Robotics Laboratory Department of Computing Imperial College London www.google.com/+andrewdavison December 18, 2015 What Has Defined
15 Years of Visual SLAM Andrew Davison Robot Vision Group and Dyson Robotics Laboratory Department of Computing Imperial College London www.google.com/+andrewdavison December 18, 2015 What Has Defined
Realtime 3D Computer Graphics Virtual Reality
 Realtime 3D Computer Graphics Virtual Reality Human Visual Perception The human visual system 2 eyes Optic nerve: 1.5 million fibers per eye (each fiber is the axon from a neuron) 125 million rods (achromatic
Realtime 3D Computer Graphics Virtual Reality Human Visual Perception The human visual system 2 eyes Optic nerve: 1.5 million fibers per eye (each fiber is the axon from a neuron) 125 million rods (achromatic
Dealing with Scale. Stephan Weiss Computer Vision Group NASA-JPL / CalTech
 Dealing with Scale Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why care about size? The IMU as scale provider: The
Dealing with Scale Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why care about size? The IMU as scale provider: The
Computer Graphics. Si Lu. Fall uter_graphics.htm 11/27/2017
 Computer Graphics Si Lu Fall 2017 http://web.cecs.pdx.edu/~lusi/cs447/cs447_547_comp uter_graphics.htm 11/27/2017 Last time o Ray tracing 2 Today o Animation o Final Exam: 14:00-15:30, Novermber 29, 2017
Computer Graphics Si Lu Fall 2017 http://web.cecs.pdx.edu/~lusi/cs447/cs447_547_comp uter_graphics.htm 11/27/2017 Last time o Ray tracing 2 Today o Animation o Final Exam: 14:00-15:30, Novermber 29, 2017
Recent Trend for Visual Media Synthesis and Analysis
 1 AR Display for Observing Sports Events based on Camera Tracking Using Pattern of Ground Akihito Enomoto, Hideo Saito saito@hvrl.ics.keio.ac.jp www.hvrl.ics.keio.ac.jp HVRL: Hyper Vision i Research Lab.
1 AR Display for Observing Sports Events based on Camera Tracking Using Pattern of Ground Akihito Enomoto, Hideo Saito saito@hvrl.ics.keio.ac.jp www.hvrl.ics.keio.ac.jp HVRL: Hyper Vision i Research Lab.
Prasanna Krishnaswamy Intel Platform Architect. Imaging Systems Design for Mixed Reality Scenarios
 Prasanna Krishnaswamy Platform Architect Imaging Systems Design for Mixed Reality Scenarios Agenda Mixed Reality (MR) Introduction Key Use Cases MR System Design Overview Imaging Sensors for MR Use Case
Prasanna Krishnaswamy Platform Architect Imaging Systems Design for Mixed Reality Scenarios Agenda Mixed Reality (MR) Introduction Key Use Cases MR System Design Overview Imaging Sensors for MR Use Case
Enhancing Traditional Rasterization Graphics with Ray Tracing. March 2015
 Enhancing Traditional Rasterization Graphics with Ray Tracing March 2015 Introductions James Rumble Developer Technology Engineer Ray Tracing Support Justin DeCell Software Design Engineer Ray Tracing
Enhancing Traditional Rasterization Graphics with Ray Tracing March 2015 Introductions James Rumble Developer Technology Engineer Ray Tracing Support Justin DeCell Software Design Engineer Ray Tracing
A Wearable Augmented Reality System Using Positioning Infrastructures and a Pedometer
 A Wearable Augmented Reality System Using Positioning Infrastructures and a Pedometer Ryuhei TENMOKU Masayuki KANBARA Naokazu YOKOYA Vision and Media Computing Laboratory Nara Institute of Science and
A Wearable Augmented Reality System Using Positioning Infrastructures and a Pedometer Ryuhei TENMOKU Masayuki KANBARA Naokazu YOKOYA Vision and Media Computing Laboratory Nara Institute of Science and
Bridging the Paper and Electronic Worlds
 Bridging the Paper and Electronic Worlds Johnson, Jellinek, Klotz, Card. Aaron Zinman MAS.961 What its about Paper exists Its useful and persistent Xerox is concerned with doc management Scanning is problematic
Bridging the Paper and Electronic Worlds Johnson, Jellinek, Klotz, Card. Aaron Zinman MAS.961 What its about Paper exists Its useful and persistent Xerox is concerned with doc management Scanning is problematic
Dominic Filion, Senior Engineer Blizzard Entertainment. Rob McNaughton, Lead Technical Artist Blizzard Entertainment
 Dominic Filion, Senior Engineer Blizzard Entertainment Rob McNaughton, Lead Technical Artist Blizzard Entertainment Screen-space techniques Deferred rendering Screen-space ambient occlusion Depth of Field
Dominic Filion, Senior Engineer Blizzard Entertainment Rob McNaughton, Lead Technical Artist Blizzard Entertainment Screen-space techniques Deferred rendering Screen-space ambient occlusion Depth of Field
Vision-Based Hand Detection for Registration of Virtual Objects in Augmented Reality
 International Journal of Future Computer and Communication, Vol. 2, No. 5, October 213 Vision-Based Hand Detection for Registration of Virtual Objects in Augmented Reality Kah Pin Ng, Guat Yew Tan, and
International Journal of Future Computer and Communication, Vol. 2, No. 5, October 213 Vision-Based Hand Detection for Registration of Virtual Objects in Augmented Reality Kah Pin Ng, Guat Yew Tan, and
Game Architecture. 2/19/16: Rasterization
 Game Architecture 2/19/16: Rasterization Viewing To render a scene, need to know Where am I and What am I looking at The view transform is the matrix that does this Maps a standard view space into world
Game Architecture 2/19/16: Rasterization Viewing To render a scene, need to know Where am I and What am I looking at The view transform is the matrix that does this Maps a standard view space into world
Dynamic Light Sculpting: Creating True 3D Holograms With GPUs
 Dynamic Light Sculpting: Creating True 3D Holograms With GPUs TM Official partner Key innovator in a volumetric sector worth 2bn according to MPEG committee on Immersive Media contributor From Augmented
Dynamic Light Sculpting: Creating True 3D Holograms With GPUs TM Official partner Key innovator in a volumetric sector worth 2bn according to MPEG committee on Immersive Media contributor From Augmented
Photorealism: Ray Tracing
 Photorealism: Ray Tracing Reading Assignment: Chapter 13 Local vs. Global Illumination Local Illumination depends on local object and light sources only Global Illumination at a point can depend on any
Photorealism: Ray Tracing Reading Assignment: Chapter 13 Local vs. Global Illumination Local Illumination depends on local object and light sources only Global Illumination at a point can depend on any
Mobile Augmented Reality
 Mobile Augmented Reality Wouter Pasman July 5, 2004, Philips ApresLuvo Series Vermelding onderdeel organisatie Ubiquitous Communications Low Latency Mobile Augmented Reality Library Entrance base station
Mobile Augmented Reality Wouter Pasman July 5, 2004, Philips ApresLuvo Series Vermelding onderdeel organisatie Ubiquitous Communications Low Latency Mobile Augmented Reality Library Entrance base station
3D Scene Reconstruction with a Mobile Camera
 3D Scene Reconstruction with a Mobile Camera 1 Introduction Robert Carrera and Rohan Khanna Stanford University: CS 231A Autonomous supernumerary arms, or "third arms", while still unconventional, hold
3D Scene Reconstruction with a Mobile Camera 1 Introduction Robert Carrera and Rohan Khanna Stanford University: CS 231A Autonomous supernumerary arms, or "third arms", while still unconventional, hold
Vision based autonomous driving - A survey of recent methods. -Tejus Gupta
 Vision based autonomous driving - A survey of recent methods -Tejus Gupta Presently, there are three major paradigms for vision based autonomous driving: Directly map input image to driving action using
Vision based autonomous driving - A survey of recent methods -Tejus Gupta Presently, there are three major paradigms for vision based autonomous driving: Directly map input image to driving action using
Improvement of Accuracy for 2D Marker-Based Tracking Using Particle Filter
 17th International Conference on Artificial Reality and Telexistence 2007 Improvement of Accuracy for 2D Marker-Based Tracking Using Particle Filter Yuko Uematsu Hideo Saito Keio University 3-14-1 Hiyoshi,
17th International Conference on Artificial Reality and Telexistence 2007 Improvement of Accuracy for 2D Marker-Based Tracking Using Particle Filter Yuko Uematsu Hideo Saito Keio University 3-14-1 Hiyoshi,
Ultrabook Convertible Application Design Considerations
 Ultrabook Convertible Application Design Considerations Introduction With the introduction of Windows 8* and touch-enabled computers, like Intel Ultrabook devices, where touch is an additional input method,
Ultrabook Convertible Application Design Considerations Introduction With the introduction of Windows 8* and touch-enabled computers, like Intel Ultrabook devices, where touch is an additional input method,
Hand Interaction in Augmented Reality
 Hand Interaction in Augmented Reality by Chris McDonald A thesis submitted to the Faculty of Graduate Studies and Research in partial fulfillment of the requirements of the degree of Master of Computer
Hand Interaction in Augmented Reality by Chris McDonald A thesis submitted to the Faculty of Graduate Studies and Research in partial fulfillment of the requirements of the degree of Master of Computer
Motion and Tracking. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Motion and Tracking Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Motion Segmentation Segment the video into multiple coherently moving objects Motion and Perceptual Organization
Motion and Tracking Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Motion Segmentation Segment the video into multiple coherently moving objects Motion and Perceptual Organization
Visual Perception Sensors
 G. Glaser Visual Perception Sensors 1 / 27 MIN Faculty Department of Informatics Visual Perception Sensors Depth Determination Gerrit Glaser University of Hamburg Faculty of Mathematics, Informatics and
G. Glaser Visual Perception Sensors 1 / 27 MIN Faculty Department of Informatics Visual Perception Sensors Depth Determination Gerrit Glaser University of Hamburg Faculty of Mathematics, Informatics and
Project 2 due today Project 3 out today. Readings Szeliski, Chapter 10 (through 10.5)
") Announcements Stereo Project 2 due today Project 3 out today Single image stereogram, by Niklas Een Readings Szeliski, Chapter 10 (through 10.5) Public Library, Stereoscopic Looking Room, Chicago, by Phillips,
Announcements Stereo Project 2 due today Project 3 out today Single image stereogram, by Niklas Een Readings Szeliski, Chapter 10 (through 10.5) Public Library, Stereoscopic Looking Room, Chicago, by Phillips,
Chapter 9 Object Tracking an Overview
 Chapter 9 Object Tracking an Overview The output of the background subtraction algorithm, described in the previous chapter, is a classification (segmentation) of pixels into foreground pixels (those belonging
Chapter 9 Object Tracking an Overview The output of the background subtraction algorithm, described in the previous chapter, is a classification (segmentation) of pixels into foreground pixels (those belonging
JUST-IN-TIME PIXELS. Mark Mine and Gary Bishop. Department of Computer Science University of North Carolina Chapel Hill, NC
 JUST-IN-TIME PIXELS Mark Mine and Gary Bishop Department of Computer Science University of North Carolina Chapel Hill, NC 27599-3175 Abstract This paper describes Just-In-Time Pixels, a technique for generating
JUST-IN-TIME PIXELS Mark Mine and Gary Bishop Department of Computer Science University of North Carolina Chapel Hill, NC 27599-3175 Abstract This paper describes Just-In-Time Pixels, a technique for generating
LOD and Occlusion Christian Miller CS Fall 2011
 LOD and Occlusion Christian Miller CS 354 - Fall 2011 Problem You want to render an enormous island covered in dense vegetation in realtime [Crysis] Scene complexity Many billions of triangles Many gigabytes
LOD and Occlusion Christian Miller CS 354 - Fall 2011 Problem You want to render an enormous island covered in dense vegetation in realtime [Crysis] Scene complexity Many billions of triangles Many gigabytes
X1 Augmented Reality SmartGlasses Developer Guide
 Purchase Now at www.thirdeyegen.com X1 Smart Glasses Spec Sheet Generate the Future X1 Augmented Reality SmartGlasses Developer Guide Index 1. ThirdEye X1 Product and Software Overview 1.1 Android Platform
Purchase Now at www.thirdeyegen.com X1 Smart Glasses Spec Sheet Generate the Future X1 Augmented Reality SmartGlasses Developer Guide Index 1. ThirdEye X1 Product and Software Overview 1.1 Android Platform
INTRODUCTION TO COMPUTER GRAPHICS. It looks like a matrix Sort of. Viewing III. Projection in Practice. Bin Sheng 10/11/ / 52
 cs337 It looks like a matrix Sort of Viewing III Projection in Practice / 52 cs337 Arbitrary 3D views Now that we have familiarity with terms we can say that these view volumes/frusta can be specified
cs337 It looks like a matrix Sort of Viewing III Projection in Practice / 52 cs337 Arbitrary 3D views Now that we have familiarity with terms we can say that these view volumes/frusta can be specified
Analysis of ARToolKit Fiducial Markers Attributes for Robust Tracking
 1 st International Conference of Recent Trends in Information and Communication Technologies Analysis of ARToolKit Fiducial Markers Attributes for Robust Tracking Ihsan Rabbi 1,2,*, Sehat Ullah 1, Muhammad
1 st International Conference of Recent Trends in Information and Communication Technologies Analysis of ARToolKit Fiducial Markers Attributes for Robust Tracking Ihsan Rabbi 1,2,*, Sehat Ullah 1, Muhammad
Augmented Reality A Game Changer for Industry. Geert Roelens. CIMCIL SYMPOSIUM, Living Tomorrow Vilvoorde 26 October 2017
 Augmented Reality A Game Changer for Industry Geert Roelens CIMCIL SYMPOSIUM, Living Tomorrow Vilvoorde 26 October 2017 McKinsey 12 potentially economically disruptive technologies CIMCIL SYMPOSIUM GEERT
Augmented Reality A Game Changer for Industry Geert Roelens CIMCIL SYMPOSIUM, Living Tomorrow Vilvoorde 26 October 2017 McKinsey 12 potentially economically disruptive technologies CIMCIL SYMPOSIUM GEERT