Fast, Accurate Detection of 100,000 Object Classes on a Single Machine
|
|
|
- Blake Garrett
- 5 years ago
- Views:
Transcription
1 Fast, Accurate Detection of 100,000 Object Classes on a Single Machine Thomas Dean etal. Google, Mountain View, CA CVPR 2013 best paper award Presented by: Zhenhua Wang
2 Outline Background This Work Experiments Conclusion
3 Outline Background Object Detection Overview Deformable Part Model This Work Experiments Conclusion




4 Object Detection

5 Detection Workflow
6 Progress of Research Harr wavelet + Linear SVM, Papageorgiou & Poggio, ICCV Harr wavelet + adaboost + cascade, Viola & Jones, CVPR 2001(Longuet-Higgins Prize in CVPR 2011). HOG + Linear SVM, Dalal & Triggs, CVPR HOG + DPM + latent SVM, Felzenszwalb etal., CVPR 2008(Lifetime achievement prize in PASCAL VOC 2010).
7 Outline Background Object Detection Overview Deformable Part Model HOG features Model Training This Work Experiments Conclusion
8 Outline Background Object Detection Overview Deformable Part Model HOG features Model Training This Work Experiments Conclusion

9 Histogram Of Gradient(HOG) Features Image is partitioned into 8x8 pixel cells In each cell we compute a histogram of gradient orientations Invariant to changes in lighting, small deformations, etc. Compute features at different resolutions (multi-scale)
 (, ) H p φ : the concatenation of HOG features from")
10 HOG Filter Array of weights for features in subwindow of HOG pyramid Learned by Linear SVM in training stage. In detection, score is dot product of filter and feature vector F φ ( H, p) (, ) H p φ : the concatenation of HOG features from subwindow specified by p
 > 0 Filter: F There is much more background")
 Harvest false positives to define hard")
11 Dalas & Triggs Detector: HOG + Linear SVM F φ ( H, p) < 0 F φ ( H, p) > 0 Filter: F There is much more background than objects Start with random negatives and repeat: 1) Train a model 2) Harvest false positives to define hard negatives
12 Outline Background Object Detection Overview Deformable Part Model HOG features Model Training This Work Experiments Conclusion

13 Deformable Part Model A Model: a root filter: F 0 n deformable parts P i a filter F i an anchor position v i a deformation cost weight d i


14 Object Hypothesis Locations of root filter and all part filters in the feature pyrimid, z = ( p0, p1,, p n ) where p = ( x, y, l ) k k k k Multiscale model captures features at two resolutions
 = ( φ( H, p ),, φ( H, p ), ( dx, dy ),, ( dx, dy )) 2 2 2 2 0 n 1 1 n")
15 Score of a Hypothesis To detect object, we compute the score: β = ( F,, F, d,, d ) 0 n 1 n Ψ ( H, z) = ( φ( H, p ),, φ( H, p ), ( dx, dy ),, ( dx, dy )) n 1 1 n n
16 Matching Sliding window Approach, each position correspond to a root position p 0 Define an overall score for root location of current window Based on best placement of parts overall score( p ) = max score( p,, p ) 0 0 p, p,, p 1 2 High scoring root locations define detections Efficient computation Dynamic programming + generalized distance transforms Complexity: from O(nk 2 ) to O(nk), where n is the total number of parts, k is the number of locations in feature pyramid. n n
 = Fi φ")
 = max( R ( x + dx,")
 = R, (")

17 Efficient Computation of Score Input image Response of i-th filter in l-th pyramid: Ril, ( xy, ) = Fi φ ( H,( xyl,, )) i-th part filter: F i O(k) Transformed response: D ( x, y) = max( R ( x + dx, y + dy) il, il, dx, dy d ( dx, dy)) i O(k) Rewrite the overall score: overall score( x, y, l) = R, ( x, y) + D (2( x, y) + v ) n 0 l il, s i i= 1 v i : the anchor position for part i relative to the root position

18 For pyramid l: R 1,l-s R n,l-s R 0,l D 1,l-s D 1,l-s

19 Mixture of DPM To capture viewpoint variance Several components, and each component has root template + deformable parts Run detection algorithm for each component independently

20 Two component bicycle model
21 Outline Background Object Detection Overview Deformable Part Model HOG features Model Training This Work Experiments Conclusion

22 Training Training images with labeled bounding boxes. What to learn: Model structures:#components, #parts, anchor locations etc. Model parameters: 0 n 1 β = ( F,, F, d,, d ) n
 (Refer to Model Initialization for more")
23 (not)learning Model Structures Heuristics, cross validation, insight (from humans) (Refer to Model Initialization for more details)
24 Learning Model Parameters Weakly labeled training data Several latent (unobserved) variables(of examples) Part filter placement Accurate location of bounding box Component label of each example
25 Recall the SVM objective n 1 2 arg min L ( β) = β + C max(0,1 y0 ( β Ψ( x ))) β Convex D i i 2 i= 1 Hinge Loss 1 y ( β Ψ( x )) is convex since it is a linear function of i i The hinge loss is convex since the maximum of two convex function is convex. Fully supervised We d like to extend it to handle latent variables. Latent SVM β
26 Latent SVM n 1 2 arg min L( β) = β + C max(0,1 0 yf ( x)) β D i β i 2 i= 1 where f ( x) = max β Ψ( xz, ) β z Z( x) Hinge Loss ββ are model parameters zz are latent values For example, f is the overall score, and z is the placements of part filters. Not convex why?
27 Semi-convexity Property: the maximum of a set of convex functions is convex, e.g. g(x)=max(f 1 (x),, f n (x)) 1 2 arg min LD( β) = β + C max(0,1 + fβ ( xi)) β 2 + C max(0,1 f ( x )) fβ ( x) = max β Φ( xz, ) is convex for ββ z Z( x) The hinge loss max(0,1 + yf i β ( xi) is convex only for negative examples. Thus the overall function is not convex. i N i P β i Not convex!
28 Latent SVM training n 1 2 arg min L( β) = β + C max(0,1 yf ( x)) β D i β i 2 i= 1 z Z( x) Convex if we fix the latent value for positive examples Optimization(local): Initialize ββ and iterate: Relabel (Determine latent values of positive examples): for current ββ, pick the best z for each positive example. Optimize ββ: stochastic gradient descent with hard example mining. f ( x) = max β Ψ( xz, ) β

29 Stochastic gradient descent

30 Stochastic gradient descent

31 Hard Example Mining Incorrected classified or Inside the margin Corrected classified

32 Hard Example Mining C t is the cache of training examples in iteration t D is the set of whole training examples
33 After the loop in the blue box, we get best model ββ under the current specified z to positive examples. Model Training Algorithm caches of hard examples Relable (Determine latent values of positive examples) f ( x) = max β Ψ( xz, ) β z Z( x) Optimize ββ with mining hard examples for negative examples
34 Model Initialization Phase 1: Initializing root filter Split positive examples according to aspect ratio in m groups P k. the shape of root filter F k 0 for P k : The mean aspect ratio of boxes P k The largest area that not larger than 80% of the boxes in P k Train F k 0 for P k using classical SVM.
35 Model Initialization Phase 1: Initializing root filter Split positive examples according to aspect ratio in m groups P k. the shape of root filter F k 0 for P k : The mean aspect ratio of boxes P k The largest area that not larger than 80% of the boxes in P k Train F k 0 for P k using classical SVM. Phase 2: Retrain the root filter by mixture model Train mixture of models with no part using full dataset by Latent SVM.(latent: component label and root position)
36 Model Initialization Phase 1: Initializing root filter Split positive examples according to aspect ratio in m groups P k. the shape of root filter F k 0 for P k : The mean aspect ratio of boxes P k The largest area that not larger than 80% of the boxes in P k Train F k 0 for P k using classical SVM. Phase 2: Retrain the root filter by mixture model Train mixture of models with no part using full dataset by Latent SVM.(latent: component label and root position) Phase 3: Initializing part models from root filter Part structure(number, shape and anchor locations(v i )): initialize 6 rectangles to cover high energy of the root filter by greedy search. Anchor along central vertical axis or at symmetric positions according to the central vertical axis. Part filter(f k i): Interpolating the root filter to twice the spatial resolution. Deformable parameter: d i = (1,1)
37 Outline Background This Work Observation WTA Hashing WTA with DPM Experiments Conclusion

38 Observation Time consuming!
39 Recent Approach Recent work considers various way to reduce complexity. Reduce #locations Reduce #parts By hardware But overall complexity is still #classes

40 Intuitive Idea For each location, we want to directly obtain the correct part filters of certain class! How to? hash indexing.
41 Outline Background This Work Observation WTA Hashing WTA with DPM Experiments Conclusion
 means similar inputs will give similar hash codes.")
42 Hashing Input vector x (e.g. flattened HOG window) Hash code h(x) is produced by hash function h. A Locality-sensitive Hash(LSH) means similar inputs will give similar hash codes.
43 Hash table
.")
44 Winner Takes All Hashing WTA provides a way to convert arbitrary feature vectors into compact binary codes.[ Yagnick et al. ICCV 2011] Preserves the rank correlation not sensitive to absolute values of each dimension, but implicit ordering of values(ordinal space)., where Hamming distance between WTA hashes approximates the rank correlation dot product(correlation) Ordinal dot product(hamming distance)

45 Computation of WTA
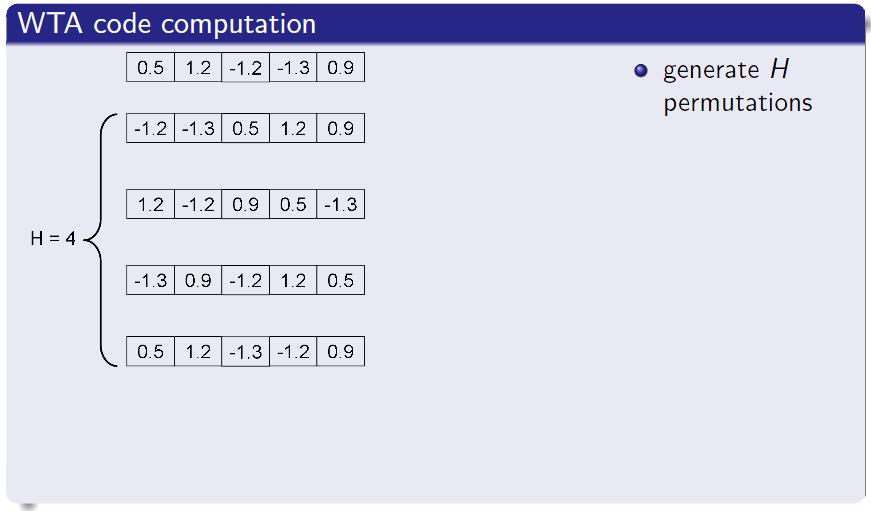
46 Computation of WTA
47 Computation of WTA

48 Computation of WTA

49 Computation of WTA
50 Outline Background This Work Observation WTA Hashing WTA with DPM Experiments Conclusion
51 Key Idea For positive examples of a class, the filter score of part filter P i of this class will be high at some pyramid layer l. score ( P)=F φ ( H,( x, y, l)) l i i FF ii and φφ(hh, (xx, yy, ll)) is highly correlated, implying their rank correlation is high They have similar WTA hash codes. We can use WTA to construct hash table for part filters after training, and use HOG feature window to retrieval correct part filters at detection.

52 WTA with DPM
53 Outline Background This Work Experiments Conclusion

54 Setups

55 PASCAL VOC 2007
56 Accuracy vs. Memory and Time
57 Accuracy vs. Number of Classes
58 100k Object Classes
59 100K Human Evaluation
60 Outline Background This Work Experiment Conclusion
61 Conclusion Contribution Scalable approach to replace dot product with LSH Demonstrate scaling of DPM to 100k object classes. Applicable to a variety of recognition method that use dot product. Limitation No root filter loss in detection performance All part filters must be the same size
62 Thanks!
Development in Object Detection. Junyuan Lin May 4th
 Development in Object Detection Junyuan Lin May 4th Line of Research [1] N. Dalal and B. Triggs. Histograms of oriented gradients for human detection, CVPR 2005. HOG Feature template [2] P. Felzenszwalb,
Development in Object Detection Junyuan Lin May 4th Line of Research [1] N. Dalal and B. Triggs. Histograms of oriented gradients for human detection, CVPR 2005. HOG Feature template [2] P. Felzenszwalb,
Object Detection with Discriminatively Trained Part Based Models
 Object Detection with Discriminatively Trained Part Based Models Pedro F. Felzenszwelb, Ross B. Girshick, David McAllester and Deva Ramanan Presented by Fabricio Santolin da Silva Kaustav Basu Some slides
Object Detection with Discriminatively Trained Part Based Models Pedro F. Felzenszwelb, Ross B. Girshick, David McAllester and Deva Ramanan Presented by Fabricio Santolin da Silva Kaustav Basu Some slides
A Discriminatively Trained, Multiscale, Deformable Part Model
 A Discriminatively Trained, Multiscale, Deformable Part Model by Pedro Felzenszwalb, David McAllester, and Deva Ramanan CS381V Visual Recognition - Paper Presentation Slide credit: Duan Tran Slide credit:
A Discriminatively Trained, Multiscale, Deformable Part Model by Pedro Felzenszwalb, David McAllester, and Deva Ramanan CS381V Visual Recognition - Paper Presentation Slide credit: Duan Tran Slide credit:
Category-level localization
 Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Deformable Part Models
 Deformable Part Models References: Felzenszwalb, Girshick, McAllester and Ramanan, Object Detec@on with Discrimina@vely Trained Part Based Models, PAMI 2010 Code available at hkp://www.cs.berkeley.edu/~rbg/latent/
Deformable Part Models References: Felzenszwalb, Girshick, McAllester and Ramanan, Object Detec@on with Discrimina@vely Trained Part Based Models, PAMI 2010 Code available at hkp://www.cs.berkeley.edu/~rbg/latent/
Object Recognition with Deformable Models
 Object Recognition with Deformable Models Pedro F. Felzenszwalb Department of Computer Science University of Chicago Joint work with: Dan Huttenlocher, Joshua Schwartz, David McAllester, Deva Ramanan.
Object Recognition with Deformable Models Pedro F. Felzenszwalb Department of Computer Science University of Chicago Joint work with: Dan Huttenlocher, Joshua Schwartz, David McAllester, Deva Ramanan.
A Discriminatively Trained, Multiscale, Deformable Part Model
 A Discriminatively Trained, Multiscale, Deformable Part Model Pedro Felzenszwalb University of Chicago pff@cs.uchicago.edu David McAllester Toyota Technological Institute at Chicago mcallester@tti-c.org
A Discriminatively Trained, Multiscale, Deformable Part Model Pedro Felzenszwalb University of Chicago pff@cs.uchicago.edu David McAllester Toyota Technological Institute at Chicago mcallester@tti-c.org
Find that! Visual Object Detection Primer
 Find that! Visual Object Detection Primer SkTech/MIT Innovation Workshop August 16, 2012 Dr. Tomasz Malisiewicz tomasz@csail.mit.edu Find that! Your Goals...imagine one such system that drives information
Find that! Visual Object Detection Primer SkTech/MIT Innovation Workshop August 16, 2012 Dr. Tomasz Malisiewicz tomasz@csail.mit.edu Find that! Your Goals...imagine one such system that drives information
Part-Based Models for Object Class Recognition Part 3
 High Level Computer Vision! Part-Based Models for Object Class Recognition Part 3 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de! http://www.d2.mpi-inf.mpg.de/cv ! State-of-the-Art
High Level Computer Vision! Part-Based Models for Object Class Recognition Part 3 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de! http://www.d2.mpi-inf.mpg.de/cv ! State-of-the-Art
Object Detection Design challenges
 Object Detection Design challenges How to efficiently search for likely objects Even simple models require searching hundreds of thousands of positions and scales Feature design and scoring How should
Object Detection Design challenges How to efficiently search for likely objects Even simple models require searching hundreds of thousands of positions and scales Feature design and scoring How should
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 People Detection Some material for these slides comes from www.cs.cornell.edu/courses/cs4670/2012fa/lectures/lec32_object_recognition.ppt
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 People Detection Some material for these slides comes from www.cs.cornell.edu/courses/cs4670/2012fa/lectures/lec32_object_recognition.ppt
 https://en.wikipedia.org/wiki/the_dress Recap: Viola-Jones sliding window detector Fast detection through two mechanisms Quickly eliminate unlikely windows Use features that are fast to compute Viola
https://en.wikipedia.org/wiki/the_dress Recap: Viola-Jones sliding window detector Fast detection through two mechanisms Quickly eliminate unlikely windows Use features that are fast to compute Viola
Detection III: Analyzing and Debugging Detection Methods
 CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
Modern Object Detection. Most slides from Ali Farhadi
 Modern Object Detection Most slides from Ali Farhadi Comparison of Classifiers assuming x in {0 1} Learning Objective Training Inference Naïve Bayes maximize j i logp + logp ( x y ; θ ) ( y ; θ ) i ij
Modern Object Detection Most slides from Ali Farhadi Comparison of Classifiers assuming x in {0 1} Learning Objective Training Inference Naïve Bayes maximize j i logp + logp ( x y ; θ ) ( y ; θ ) i ij
Category vs. instance recognition
 Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Object Category Detection: Sliding Windows
 04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model
 Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model Johnson Hsieh (johnsonhsieh@gmail.com), Alexander Chia (alexchia@stanford.edu) Abstract -- Object occlusion presents a major
Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model Johnson Hsieh (johnsonhsieh@gmail.com), Alexander Chia (alexchia@stanford.edu) Abstract -- Object occlusion presents a major
Object Category Detection: Sliding Windows
 03/18/10 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Goal: Detect all instances of objects Influential Works in Detection Sung-Poggio
03/18/10 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Goal: Detect all instances of objects Influential Works in Detection Sung-Poggio
Spatial Localization and Detection. Lecture 8-1
 Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Combining ROI-base and Superpixel Segmentation for Pedestrian Detection Ji Ma1,2, a, Jingjiao Li1, Zhenni Li1 and Li Ma2
 6th International Conference on Machinery, Materials, Environment, Biotechnology and Computer (MMEBC 2016) Combining ROI-base and Superpixel Segmentation for Pedestrian Detection Ji Ma1,2, a, Jingjiao
6th International Conference on Machinery, Materials, Environment, Biotechnology and Computer (MMEBC 2016) Combining ROI-base and Superpixel Segmentation for Pedestrian Detection Ji Ma1,2, a, Jingjiao
Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection
 Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection Hyunghoon Cho and David Wu December 10, 2010 1 Introduction Given its performance in recent years' PASCAL Visual
Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection Hyunghoon Cho and David Wu December 10, 2010 1 Introduction Given its performance in recent years' PASCAL Visual
DPM Score Regressor for Detecting Occluded Humans from Depth Images
 DPM Score Regressor for Detecting Occluded Humans from Depth Images Tsuyoshi Usami, Hiroshi Fukui, Yuji Yamauchi, Takayoshi Yamashita and Hironobu Fujiyoshi Email: usami915@vision.cs.chubu.ac.jp Email:
DPM Score Regressor for Detecting Occluded Humans from Depth Images Tsuyoshi Usami, Hiroshi Fukui, Yuji Yamauchi, Takayoshi Yamashita and Hironobu Fujiyoshi Email: usami915@vision.cs.chubu.ac.jp Email:
Object Category Detection. Slides mostly from Derek Hoiem
 Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Recognition II
 Object Recognition II Linda Shapiro EE/CSE 576 with CNN slides from Ross Girshick 1 Outline Object detection the task, evaluation, datasets Convolutional Neural Networks (CNNs) overview and history Region-based
Object Recognition II Linda Shapiro EE/CSE 576 with CNN slides from Ross Girshick 1 Outline Object detection the task, evaluation, datasets Convolutional Neural Networks (CNNs) overview and history Region-based
Previously. Window-based models for generic object detection 4/11/2011
 Previously for generic object detection Monday, April 11 UT-Austin Instance recognition Local features: detection and description Local feature matching, scalable indexing Spatial verification Intro to
Previously for generic object detection Monday, April 11 UT-Austin Instance recognition Local features: detection and description Local feature matching, scalable indexing Spatial verification Intro to
Recap Image Classification with Bags of Local Features
 Recap Image Classification with Bags of Local Features Bag of Feature models were the state of the art for image classification for a decade BoF may still be the state of the art for instance retrieval
Recap Image Classification with Bags of Local Features Bag of Feature models were the state of the art for image classification for a decade BoF may still be the state of the art for instance retrieval
Discriminative classifiers for image recognition
 Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Person Detection in Images using HoG + Gentleboost. Rahul Rajan June 1st July 15th CMU Q Robotics Lab
 Person Detection in Images using HoG + Gentleboost Rahul Rajan June 1st July 15th CMU Q Robotics Lab 1 Introduction One of the goals of computer vision Object class detection car, animal, humans Human
Person Detection in Images using HoG + Gentleboost Rahul Rajan June 1st July 15th CMU Q Robotics Lab 1 Introduction One of the goals of computer vision Object class detection car, animal, humans Human
Part based models for recognition. Kristen Grauman
 Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Rich feature hierarchies for accurate object detection and semantic segmentation
 Rich feature hierarchies for accurate object detection and semantic segmentation BY; ROSS GIRSHICK, JEFF DONAHUE, TREVOR DARRELL AND JITENDRA MALIK PRESENTER; MUHAMMAD OSAMA Object detection vs. classification
Rich feature hierarchies for accurate object detection and semantic segmentation BY; ROSS GIRSHICK, JEFF DONAHUE, TREVOR DARRELL AND JITENDRA MALIK PRESENTER; MUHAMMAD OSAMA Object detection vs. classification
Pedestrian Detection Using Structured SVM
 Pedestrian Detection Using Structured SVM Wonhui Kim Stanford University Department of Electrical Engineering wonhui@stanford.edu Seungmin Lee Stanford University Department of Electrical Engineering smlee729@stanford.edu.
Pedestrian Detection Using Structured SVM Wonhui Kim Stanford University Department of Electrical Engineering wonhui@stanford.edu Seungmin Lee Stanford University Department of Electrical Engineering smlee729@stanford.edu.
PARTIALLY OCCLUDED OBJECT DETECTION. Di Sun. B.S. in Electrical Engineering, Beijing Jiaotong University, Beijing, China, 2014
 PARTIALLY OCCLUDED OBJECT DETECTION by Di Sun B.S. in Electrical Engineering, Beijing Jiaotong University, Beijing, China, 2014 Submitted to the Graduate Faculty of Swanson School of Engineering in partial
PARTIALLY OCCLUDED OBJECT DETECTION by Di Sun B.S. in Electrical Engineering, Beijing Jiaotong University, Beijing, China, 2014 Submitted to the Graduate Faculty of Swanson School of Engineering in partial
LEARNING TO GENERATE CHAIRS WITH CONVOLUTIONAL NEURAL NETWORKS
 LEARNING TO GENERATE CHAIRS WITH CONVOLUTIONAL NEURAL NETWORKS Alexey Dosovitskiy, Jost Tobias Springenberg and Thomas Brox University of Freiburg Presented by: Shreyansh Daftry Visual Learning and Recognition
LEARNING TO GENERATE CHAIRS WITH CONVOLUTIONAL NEURAL NETWORKS Alexey Dosovitskiy, Jost Tobias Springenberg and Thomas Brox University of Freiburg Presented by: Shreyansh Daftry Visual Learning and Recognition
Fast Human Detection Using a Cascade of Histograms of Oriented Gradients
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Fast Human Detection Using a Cascade of Histograms of Oriented Gradients Qiang Zhu, Shai Avidan, Mei-Chen Yeh, Kwang-Ting Cheng TR26-68 June
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Fast Human Detection Using a Cascade of Histograms of Oriented Gradients Qiang Zhu, Shai Avidan, Mei-Chen Yeh, Kwang-Ting Cheng TR26-68 June
Hierarchical Learning for Object Detection. Long Zhu, Yuanhao Chen, William Freeman, Alan Yuille, Antonio Torralba MIT and UCLA, 2010
 Hierarchical Learning for Object Detection Long Zhu, Yuanhao Chen, William Freeman, Alan Yuille, Antonio Torralba MIT and UCLA, 2010 Background I: Our prior work Our work for the Pascal Challenge is based
Hierarchical Learning for Object Detection Long Zhu, Yuanhao Chen, William Freeman, Alan Yuille, Antonio Torralba MIT and UCLA, 2010 Background I: Our prior work Our work for the Pascal Challenge is based
Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation
 Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation M. Blauth, E. Kraft, F. Hirschenberger, M. Böhm Fraunhofer Institute for Industrial Mathematics, Fraunhofer-Platz 1,
Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation M. Blauth, E. Kraft, F. Hirschenberger, M. Böhm Fraunhofer Institute for Industrial Mathematics, Fraunhofer-Platz 1,
Histograms of Oriented Gradients for Human Detection p. 1/1
 Histograms of Oriented Gradients for Human Detection p. 1/1 Histograms of Oriented Gradients for Human Detection Navneet Dalal and Bill Triggs INRIA Rhône-Alpes Grenoble, France Funding: acemedia, LAVA,
Histograms of Oriented Gradients for Human Detection p. 1/1 Histograms of Oriented Gradients for Human Detection Navneet Dalal and Bill Triggs INRIA Rhône-Alpes Grenoble, France Funding: acemedia, LAVA,
Beyond Sliding Windows: Object Localization by Efficient Subwindow Search
 Beyond Sliding Windows: Object Localization by Efficient Subwindow Search Christoph H. Lampert, Matthew B. Blaschko, & Thomas Hofmann Max Planck Institute for Biological Cybernetics Tübingen, Germany Google,
Beyond Sliding Windows: Object Localization by Efficient Subwindow Search Christoph H. Lampert, Matthew B. Blaschko, & Thomas Hofmann Max Planck Institute for Biological Cybernetics Tübingen, Germany Google,
TOWARDS HUMAN INTERACTION ANALYSIS
 Master in Artificial Intelligence (UPC-URV-UB) Master of Science Thesis TOWARDS HUMAN INTERACTION ANALYSIS Maedeh Aghaei Gavari Advisor/s: Dr. Petia Ivanova Radeva January 2013 Productivity is never an
Master in Artificial Intelligence (UPC-URV-UB) Master of Science Thesis TOWARDS HUMAN INTERACTION ANALYSIS Maedeh Aghaei Gavari Advisor/s: Dr. Petia Ivanova Radeva January 2013 Productivity is never an
Window based detectors
 Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Histogram of Oriented Gradients (HOG) for Object Detection
 for Object Detection") Histogram of Oriented Gradients (HOG) for Object Detection Navneet DALAL Joint work with Bill TRIGGS and Cordelia SCHMID Goal & Challenges Goal: Detect and localise people in images and videos n Wide variety
Histogram of Oriented Gradients (HOG) for Object Detection Navneet DALAL Joint work with Bill TRIGGS and Cordelia SCHMID Goal & Challenges Goal: Detect and localise people in images and videos n Wide variety
Object recognition. Methods for classification and image representation
 Object recognition Methods for classification and image representation Credits Slides by Pete Barnum Slides by FeiFei Li Paul Viola, Michael Jones, Robust Realtime Object Detection, IJCV 04 Navneet Dalal
Object recognition Methods for classification and image representation Credits Slides by Pete Barnum Slides by FeiFei Li Paul Viola, Michael Jones, Robust Realtime Object Detection, IJCV 04 Navneet Dalal
Face and Nose Detection in Digital Images using Local Binary Patterns
 Face and Nose Detection in Digital Images using Local Binary Patterns Stanko Kružić Post-graduate student University of Split, Faculty of Electrical Engineering, Mechanical Engineering and Naval Architecture
Face and Nose Detection in Digital Images using Local Binary Patterns Stanko Kružić Post-graduate student University of Split, Faculty of Electrical Engineering, Mechanical Engineering and Naval Architecture
Multiple-Person Tracking by Detection
 http://excel.fit.vutbr.cz Multiple-Person Tracking by Detection Jakub Vojvoda* Abstract Detection and tracking of multiple person is challenging problem mainly due to complexity of scene and large intra-class
http://excel.fit.vutbr.cz Multiple-Person Tracking by Detection Jakub Vojvoda* Abstract Detection and tracking of multiple person is challenging problem mainly due to complexity of scene and large intra-class
18 October, 2013 MVA ENS Cachan. Lecture 6: Introduction to graphical models Iasonas Kokkinos
 Machine Learning for Computer Vision 1 18 October, 2013 MVA ENS Cachan Lecture 6: Introduction to graphical models Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Center for Visual Computing Ecole Centrale Paris
Machine Learning for Computer Vision 1 18 October, 2013 MVA ENS Cachan Lecture 6: Introduction to graphical models Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Center for Visual Computing Ecole Centrale Paris
Learning and Recognizing Visual Object Categories Without First Detecting Features
 Learning and Recognizing Visual Object Categories Without First Detecting Features Daniel Huttenlocher 2007 Joint work with D. Crandall and P. Felzenszwalb Object Category Recognition Generic classes rather
Learning and Recognizing Visual Object Categories Without First Detecting Features Daniel Huttenlocher 2007 Joint work with D. Crandall and P. Felzenszwalb Object Category Recognition Generic classes rather
Parameter Sensitive Detectors
 Boston University OpenBU Computer Science http://open.bu.edu CAS: Computer Science: Technical Reports 2007 Parameter Sensitive Detectors Yuan, Quan Boston University Computer Science Department https://hdl.handle.net/244/680
Boston University OpenBU Computer Science http://open.bu.edu CAS: Computer Science: Technical Reports 2007 Parameter Sensitive Detectors Yuan, Quan Boston University Computer Science Department https://hdl.handle.net/244/680
Human detections using Beagle board-xm
 Human detections using Beagle board-xm CHANDAN KUMAR 1 V. AJAY KUMAR 2 R. MURALI 3 1 (M. TECH STUDENT, EMBEDDED SYSTEMS, DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING, VIJAYA KRISHNA INSTITUTE
Human detections using Beagle board-xm CHANDAN KUMAR 1 V. AJAY KUMAR 2 R. MURALI 3 1 (M. TECH STUDENT, EMBEDDED SYSTEMS, DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING, VIJAYA KRISHNA INSTITUTE
Learning to Localize Objects with Structured Output Regression
 Learning to Localize Objects with Structured Output Regression Matthew Blaschko and Christopher Lampert ECCV 2008 Best Student Paper Award Presentation by Jaeyong Sung and Yiting Xie 1 Object Localization
Learning to Localize Objects with Structured Output Regression Matthew Blaschko and Christopher Lampert ECCV 2008 Best Student Paper Award Presentation by Jaeyong Sung and Yiting Xie 1 Object Localization
CS6716 Pattern Recognition
 CS6716 Pattern Recognition Aaron Bobick School of Interactive Computing Administrivia PS3 is out now, due April 8. Today chapter 12 of the Hastie book. Slides (and entertainment) from Moataz Al-Haj Three
CS6716 Pattern Recognition Aaron Bobick School of Interactive Computing Administrivia PS3 is out now, due April 8. Today chapter 12 of the Hastie book. Slides (and entertainment) from Moataz Al-Haj Three
Face Detection and Alignment. Prof. Xin Yang HUST
 Face Detection and Alignment Prof. Xin Yang HUST Many slides adapted from P. Viola Face detection Face detection Basic idea: slide a window across image and evaluate a face model at every location Challenges
Face Detection and Alignment Prof. Xin Yang HUST Many slides adapted from P. Viola Face detection Face detection Basic idea: slide a window across image and evaluate a face model at every location Challenges
Large-Scale Live Active Learning: Training Object Detectors with Crawled Data and Crowds
 Large-Scale Live Active Learning: Training Object Detectors with Crawled Data and Crowds Sudheendra Vijayanarasimhan Kristen Grauman Department of Computer Science University of Texas at Austin Austin,
Large-Scale Live Active Learning: Training Object Detectors with Crawled Data and Crowds Sudheendra Vijayanarasimhan Kristen Grauman Department of Computer Science University of Texas at Austin Austin,
An Object Detection Algorithm based on Deformable Part Models with Bing Features Chunwei Li1, a and Youjun Bu1, b
 5th International Conference on Advanced Materials and Computer Science (ICAMCS 2016) An Object Detection Algorithm based on Deformable Part Models with Bing Features Chunwei Li1, a and Youjun Bu1, b 1
5th International Conference on Advanced Materials and Computer Science (ICAMCS 2016) An Object Detection Algorithm based on Deformable Part Models with Bing Features Chunwei Li1, a and Youjun Bu1, b 1
Study of Viola-Jones Real Time Face Detector
 Study of Viola-Jones Real Time Face Detector Kaiqi Cen cenkaiqi@gmail.com Abstract Face detection has been one of the most studied topics in computer vision literature. Given an arbitrary image the goal
Study of Viola-Jones Real Time Face Detector Kaiqi Cen cenkaiqi@gmail.com Abstract Face detection has been one of the most studied topics in computer vision literature. Given an arbitrary image the goal
Part-Based Models for Object Class Recognition Part 2
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
Part-Based Models for Object Class Recognition Part 2
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
SURF. Lecture6: SURF and HOG. Integral Image. Feature Evaluation with Integral Image
 SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
Modeling 3D viewpoint for part-based object recognition of rigid objects
 Modeling 3D viewpoint for part-based object recognition of rigid objects Joshua Schwartz Department of Computer Science Cornell University jdvs@cs.cornell.edu Abstract Part-based object models based on
Modeling 3D viewpoint for part-based object recognition of rigid objects Joshua Schwartz Department of Computer Science Cornell University jdvs@cs.cornell.edu Abstract Part-based object models based on
High Level Computer Vision. Sliding Window Detection: Viola-Jones-Detector & Histogram of Oriented Gradients (HOG)
") High Level Computer Vision Sliding Window Detection: Viola-Jones-Detector & Histogram of Oriented Gradients (HOG) Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de http://www.d2.mpi-inf.mpg.de/cv
High Level Computer Vision Sliding Window Detection: Viola-Jones-Detector & Histogram of Oriented Gradients (HOG) Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de http://www.d2.mpi-inf.mpg.de/cv
Selective Search for Object Recognition
 Selective Search for Object Recognition Uijlings et al. Schuyler Smith Overview Introduction Object Recognition Selective Search Similarity Metrics Results Object Recognition Kitten Goal: Problem: Where
Selective Search for Object Recognition Uijlings et al. Schuyler Smith Overview Introduction Object Recognition Selective Search Similarity Metrics Results Object Recognition Kitten Goal: Problem: Where
Sketchable Histograms of Oriented Gradients for Object Detection
 Sketchable Histograms of Oriented Gradients for Object Detection No Author Given No Institute Given Abstract. In this paper we investigate a new representation approach for visual object recognition. The
Sketchable Histograms of Oriented Gradients for Object Detection No Author Given No Institute Given Abstract. In this paper we investigate a new representation approach for visual object recognition. The
High Level Computer Vision
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de http://www.d2.mpi-inf.mpg.de/cv Please Note No
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de http://www.d2.mpi-inf.mpg.de/cv Please Note No
6.819 / 6.869: Advances in Computer Vision
 6.819 / 6.869: Advances in Computer Vision Image Retrieval: Retrieval: Information, images, objects, large-scale Website: http://6.869.csail.mit.edu/fa15/ Instructor: Yusuf Aytar Lecture TR 9:30AM 11:00AM
6.819 / 6.869: Advances in Computer Vision Image Retrieval: Retrieval: Information, images, objects, large-scale Website: http://6.869.csail.mit.edu/fa15/ Instructor: Yusuf Aytar Lecture TR 9:30AM 11:00AM
Bus Detection and recognition for visually impaired people
 Bus Detection and recognition for visually impaired people Hangrong Pan, Chucai Yi, and Yingli Tian The City College of New York The Graduate Center The City University of New York MAP4VIP Outline Motivation
Bus Detection and recognition for visually impaired people Hangrong Pan, Chucai Yi, and Yingli Tian The City College of New York The Graduate Center The City University of New York MAP4VIP Outline Motivation
A novel template matching method for human detection
 University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2009 A novel template matching method for human detection Duc Thanh Nguyen
University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2009 A novel template matching method for human detection Duc Thanh Nguyen
Multiple-Choice Questionnaire Group C
 Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
Distance-Based Descriptors and Their Application in the Task of Object Detection
 Distance-Based Descriptors and Their Application in the Task of Object Detection Radovan Fusek (B) and Eduard Sojka Department of Computer Science, Technical University of Ostrava, FEECS, 17. Listopadu
Distance-Based Descriptors and Their Application in the Task of Object Detection Radovan Fusek (B) and Eduard Sojka Department of Computer Science, Technical University of Ostrava, FEECS, 17. Listopadu
Human detection using histogram of oriented gradients. Srikumar Ramalingam School of Computing University of Utah
 Human detection using histogram of oriented gradients Srikumar Ramalingam School of Computing University of Utah Reference Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection,
Human detection using histogram of oriented gradients Srikumar Ramalingam School of Computing University of Utah Reference Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection,
International Journal Of Global Innovations -Vol.4, Issue.I Paper Id: SP-V4-I1-P17 ISSN Online:
 IMPLEMENTATION OF EMBEDDED HUMAN TRACKING SYSTEM USING DM3730 DUALCORE PROCESSOR #1 DASARI ALEKHYA M.TECH Student, #2 Dr. SYED ABUDHAGIR.U Associate Professor, Dept of ECE B.V.RAJU INSTITUTE OF TECHNOLOGY,
IMPLEMENTATION OF EMBEDDED HUMAN TRACKING SYSTEM USING DM3730 DUALCORE PROCESSOR #1 DASARI ALEKHYA M.TECH Student, #2 Dr. SYED ABUDHAGIR.U Associate Professor, Dept of ECE B.V.RAJU INSTITUTE OF TECHNOLOGY,
Adaptive Learning of an Accurate Skin-Color Model
 Adaptive Learning of an Accurate Skin-Color Model Q. Zhu K.T. Cheng C. T. Wu Y. L. Wu Electrical & Computer Engineering University of California, Santa Barbara Presented by: H.T Wang Outline Generic Skin
Adaptive Learning of an Accurate Skin-Color Model Q. Zhu K.T. Cheng C. T. Wu Y. L. Wu Electrical & Computer Engineering University of California, Santa Barbara Presented by: H.T Wang Outline Generic Skin
A New Strategy of Pedestrian Detection Based on Pseudo- Wavelet Transform and SVM
 A New Strategy of Pedestrian Detection Based on Pseudo- Wavelet Transform and SVM M.Ranjbarikoohi, M.Menhaj and M.Sarikhani Abstract: Pedestrian detection has great importance in automotive vision systems
A New Strategy of Pedestrian Detection Based on Pseudo- Wavelet Transform and SVM M.Ranjbarikoohi, M.Menhaj and M.Sarikhani Abstract: Pedestrian detection has great importance in automotive vision systems
Pedestrian Detection and Tracking in Images and Videos
 Pedestrian Detection and Tracking in Images and Videos Azar Fazel Stanford University azarf@stanford.edu Viet Vo Stanford University vtvo@stanford.edu Abstract The increase in population density and accessibility
Pedestrian Detection and Tracking in Images and Videos Azar Fazel Stanford University azarf@stanford.edu Viet Vo Stanford University vtvo@stanford.edu Abstract The increase in population density and accessibility
Detecting Pedestrians Using Patterns of Motion and Appearance (Viola & Jones) - Aditya Pabbaraju
 - Aditya Pabbaraju") Detecting Pedestrians Using Patterns of Motion and Appearance (Viola & Jones) - Aditya Pabbaraju Background We are adept at classifying actions. Easily categorize even with noisy and small images Want
Detecting Pedestrians Using Patterns of Motion and Appearance (Viola & Jones) - Aditya Pabbaraju Background We are adept at classifying actions. Easily categorize even with noisy and small images Want
Generic Object-Face detection
 Generic Object-Face detection Jana Kosecka Many slides adapted from P. Viola, K. Grauman, S. Lazebnik and many others Today Window-based generic object detection basic pipeline boosting classifiers face
Generic Object-Face detection Jana Kosecka Many slides adapted from P. Viola, K. Grauman, S. Lazebnik and many others Today Window-based generic object detection basic pipeline boosting classifiers face
Deep Learning for Object detection & localization
 Deep Learning for Object detection & localization RCNN, Fast RCNN, Faster RCNN, YOLO, GAP, CAM, MSROI Aaditya Prakash Sep 25, 2018 Image classification Image classification Whole of image is classified
Deep Learning for Object detection & localization RCNN, Fast RCNN, Faster RCNN, YOLO, GAP, CAM, MSROI Aaditya Prakash Sep 25, 2018 Image classification Image classification Whole of image is classified
Deformable Part Models Revisited: A Performance Evaluation for Object Category Pose Estimation
 Deformable Part Models Revisited: A Performance Evaluation for Object Category Pose Estimation Roberto J. Lo pez-sastre Tinne Tuytelaars2 Silvio Savarese3 GRAM, Dept. Signal Theory and Communications,
Deformable Part Models Revisited: A Performance Evaluation for Object Category Pose Estimation Roberto J. Lo pez-sastre Tinne Tuytelaars2 Silvio Savarese3 GRAM, Dept. Signal Theory and Communications,
ImageCLEF 2011
 SZTAKI @ ImageCLEF 2011 Bálint Daróczy joint work with András Benczúr, Róbert Pethes Data Mining and Web Search Group Computer and Automation Research Institute Hungarian Academy of Sciences Training/test
SZTAKI @ ImageCLEF 2011 Bálint Daróczy joint work with András Benczúr, Róbert Pethes Data Mining and Web Search Group Computer and Automation Research Institute Hungarian Academy of Sciences Training/test
Structured Models in. Dan Huttenlocher. June 2010
 Structured Models in Computer Vision i Dan Huttenlocher June 2010 Structured Models Problems where output variables are mutually dependent or constrained E.g., spatial or temporal relations Such dependencies
Structured Models in Computer Vision i Dan Huttenlocher June 2010 Structured Models Problems where output variables are mutually dependent or constrained E.g., spatial or temporal relations Such dependencies
Segmentation as Selective Search for Object Recognition in ILSVRC2011
 Segmentation as Selective Search for Object Recognition in ILSVRC2011 Koen van de Sande Jasper Uijlings Arnold Smeulders Theo Gevers Nicu Sebe Cees Snoek University of Amsterdam, University of Trento ILSVRC2011
Segmentation as Selective Search for Object Recognition in ILSVRC2011 Koen van de Sande Jasper Uijlings Arnold Smeulders Theo Gevers Nicu Sebe Cees Snoek University of Amsterdam, University of Trento ILSVRC2011
Beyond Bags of features Spatial information & Shape models
 Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Object Detection. Part1. Presenter: Dae-Yong
 Object Part1 Presenter: Dae-Yong Contents 1. What is an Object? 2. Traditional Object Detector 3. Deep Learning-based Object Detector What is an Object? Subset of Object Recognition What is an Object?
Object Part1 Presenter: Dae-Yong Contents 1. What is an Object? 2. Traditional Object Detector 3. Deep Learning-based Object Detector What is an Object? Subset of Object Recognition What is an Object?
Learning Spatial Context: Using Stuff to Find Things
 Learning Spatial Context: Using Stuff to Find Things Wei-Cheng Su Motivation 2 Leverage contextual information to enhance detection Some context objects are non-rigid and are more naturally classified
Learning Spatial Context: Using Stuff to Find Things Wei-Cheng Su Motivation 2 Leverage contextual information to enhance detection Some context objects are non-rigid and are more naturally classified
Three-Dimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients
 ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
Skin and Face Detection
 Skin and Face Detection Linda Shapiro EE/CSE 576 1 What s Coming 1. Review of Bakic flesh detector 2. Fleck and Forsyth flesh detector 3. Details of Rowley face detector 4. Review of the basic AdaBoost
Skin and Face Detection Linda Shapiro EE/CSE 576 1 What s Coming 1. Review of Bakic flesh detector 2. Fleck and Forsyth flesh detector 3. Details of Rowley face detector 4. Review of the basic AdaBoost
Regionlet Object Detector with Hand-crafted and CNN Feature
 Regionlet Object Detector with Hand-crafted and CNN Feature Xiaoyu Wang Research Xiaoyu Wang Research Ming Yang Horizon Robotics Shenghuo Zhu Alibaba Group Yuanqing Lin Baidu Overview of this section Regionlet
Regionlet Object Detector with Hand-crafted and CNN Feature Xiaoyu Wang Research Xiaoyu Wang Research Ming Yang Horizon Robotics Shenghuo Zhu Alibaba Group Yuanqing Lin Baidu Overview of this section Regionlet
Object Detection. Computer Vision Yuliang Zou, Virginia Tech. Many slides from D. Hoiem, J. Hays, J. Johnson, R. Girshick
 Object Detection Computer Vision Yuliang Zou, Virginia Tech Many slides from D. Hoiem, J. Hays, J. Johnson, R. Girshick Administrative stuffs HW 4 due 11:59pm on Wed, November 8 HW 3 grades are out Average:
Object Detection Computer Vision Yuliang Zou, Virginia Tech Many slides from D. Hoiem, J. Hays, J. Johnson, R. Girshick Administrative stuffs HW 4 due 11:59pm on Wed, November 8 HW 3 grades are out Average:
Toward Retail Product Recognition on Grocery Shelves
 Toward Retail Product Recognition on Grocery Shelves Gül Varol gul.varol@boun.edu.tr Boğaziçi University, İstanbul, Turkey İdea Teknoloji Çözümleri, İstanbul, Turkey Rıdvan S. Kuzu ridvan.salih@boun.edu.tr
Toward Retail Product Recognition on Grocery Shelves Gül Varol gul.varol@boun.edu.tr Boğaziçi University, İstanbul, Turkey İdea Teknoloji Çözümleri, İstanbul, Turkey Rıdvan S. Kuzu ridvan.salih@boun.edu.tr
on learned visual embedding patrick pérez Allegro Workshop Inria Rhônes-Alpes 22 July 2015
 on learned visual embedding patrick pérez Allegro Workshop Inria Rhônes-Alpes 22 July 2015 Vector visual representation Fixed-size image representation High-dim (100 100,000) Generic, unsupervised: BoW,
on learned visual embedding patrick pérez Allegro Workshop Inria Rhônes-Alpes 22 July 2015 Vector visual representation Fixed-size image representation High-dim (100 100,000) Generic, unsupervised: BoW,
Object Recognition and Detection
 CS 2770: Computer Vision Object Recognition and Detection Prof. Adriana Kovashka University of Pittsburgh March 16, 21, 23, 2017 Plan for the next few lectures Recognizing the category in the image as
CS 2770: Computer Vision Object Recognition and Detection Prof. Adriana Kovashka University of Pittsburgh March 16, 21, 23, 2017 Plan for the next few lectures Recognizing the category in the image as
Computer Vision Lecture 16
 Computer Vision Lecture 16 Deep Learning for Object Categorization 14.01.2016 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period
Computer Vision Lecture 16 Deep Learning for Object Categorization 14.01.2016 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period
Lecture 15: Detecting Objects by Parts
 Lecture 15: Detecting Objects by Parts David R. Morales, Austin O. Narcomey, Minh-An Quinn, Guilherme Reis, Omar Solis Department of Computer Science Stanford University Stanford, CA 94305 {mrlsdvd, aon2,
Lecture 15: Detecting Objects by Parts David R. Morales, Austin O. Narcomey, Minh-An Quinn, Guilherme Reis, Omar Solis Department of Computer Science Stanford University Stanford, CA 94305 {mrlsdvd, aon2,
Deformable Part Models with Individual Part Scaling
 DUBOUT, FLEURET: DEFORMABLE PART MODELS WITH INDIVIDUAL PART SCALING 1 Deformable Part Models with Individual Part Scaling Charles Dubout charles.dubout@idiap.ch François Fleuret francois.fleuret@idiap.ch
DUBOUT, FLEURET: DEFORMABLE PART MODELS WITH INDIVIDUAL PART SCALING 1 Deformable Part Models with Individual Part Scaling Charles Dubout charles.dubout@idiap.ch François Fleuret francois.fleuret@idiap.ch
Face detection and recognition. Detection Recognition Sally
 Face detection and recognition Detection Recognition Sally Face detection & recognition Viola & Jones detector Available in open CV Face recognition Eigenfaces for face recognition Metric learning identification
Face detection and recognition Detection Recognition Sally Face detection & recognition Viola & Jones detector Available in open CV Face recognition Eigenfaces for face recognition Metric learning identification
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Recognition of Animal Skin Texture Attributes in the Wild. Amey Dharwadker (aap2174) Kai Zhang (kz2213)
 Kai Zhang (kz2213)") Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
Rich feature hierarchies for accurate object detection and semant
 Rich feature hierarchies for accurate object detection and semantic segmentation Speaker: Yucong Shen 4/5/2018 Develop of Object Detection 1 DPM (Deformable parts models) 2 R-CNN 3 Fast R-CNN 4 Faster
Rich feature hierarchies for accurate object detection and semantic segmentation Speaker: Yucong Shen 4/5/2018 Develop of Object Detection 1 DPM (Deformable parts models) 2 R-CNN 3 Fast R-CNN 4 Faster
Detecting Object Instances Without Discriminative Features
 Detecting Object Instances Without Discriminative Features Edward Hsiao June 19, 2013 Thesis Committee: Martial Hebert, Chair Alexei Efros Takeo Kanade Andrew Zisserman, University of Oxford 1 Object Instance
Detecting Object Instances Without Discriminative Features Edward Hsiao June 19, 2013 Thesis Committee: Martial Hebert, Chair Alexei Efros Takeo Kanade Andrew Zisserman, University of Oxford 1 Object Instance
Object detection. Asbjørn Berge. INF 5300 Advanced Topic: Video Content Analysis. Technology for a better society
 INF 5300 Advanced Topic: Video Content Analysis Object detection Asbjørn Berge Small part of the Cydonia region, taken by the Viking 1orbiter and released by NASA/JPL on July 25, 1976 Salvador Dali (1974)
INF 5300 Advanced Topic: Video Content Analysis Object detection Asbjørn Berge Small part of the Cydonia region, taken by the Viking 1orbiter and released by NASA/JPL on July 25, 1976 Salvador Dali (1974)
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)