Hierarchical Learning for Object Detection. Long Zhu, Yuanhao Chen, William Freeman, Alan Yuille, Antonio Torralba MIT and UCLA, 2010
|
|
|
- Hope Jackson
- 5 years ago
- Views:
Transcription
1 Hierarchical Learning for Object Detection Long Zhu, Yuanhao Chen, William Freeman, Alan Yuille, Antonio Torralba MIT and UCLA, 2010
2 Background I: Our prior work Our work for the Pascal Challenge is based on two recent publications from our group. Latent Hierarchical Structural Learning for Object Detection. Long Zhu, Yuanhao Chen, Alan Yuille, William Freeman. CVPR Active Mask Hierarchies for Object Detection. Yuanhao Chen, Long Zhu, Alan Yuille. ECCV 2010.
3 Background II: Related Work We build on previous work: Learning part based structure model UoCTTI (Felzenszwalb PAMI2009), Berkeley (Bourdev ICCV2009), Caltech(ECCV 2008), Blaschko (ECCV2008) Learning appearance features Oxford (Vedaldi ICCV2009, Bosch CIVR 007) Learning to include contextual information UCI (Desai ICCV2009), MIT (Choi et al. 2010), INRIA (Harzallah et al. ICCV 2009).
4 Overview of our approach 1. Hierarchical part based models with three layers. 4 6 models for each object to allow for pose. 2. Energy potential terms: (a) HOGs for edges, (b) Histogram of Words (HOWs) for regional appearance, (c) shape features. 3. Detect objects by scanning sub windows using dynamic programming (to detect positions of the parts). 4. Learn the parameters of the models by machine learning: a variant (icccp) of Latent SVM.
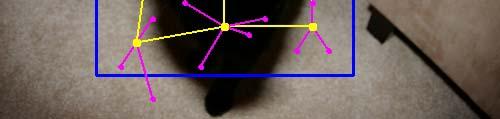
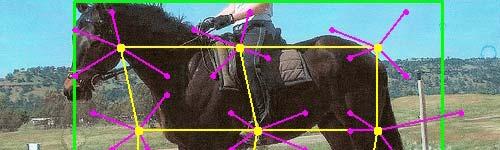
5 Hierarchical Part Based Models: (1) Each hierarchy eac ys is a 3 layer tree. Each node represents a part. Total of 46 nodes: ( x 9) Each node has a spatial position (parts can move or are active ) Graph edgesfrom parents to child impose spatial constraints.



, yellow (9),")
6 Hierarchical Part Based Models: (2) The parts can move relative to each other. This allows the model to have spatial deformations. Constraints on these deformations are imposed by edges bt between parents and child (will be learnt) Parent Child spatial constraints Parts: blue (1), yellow (9), purple (36) Deformations of the Car Deformations of the Horse









7 Hierarchical Part Based Models: (3) Each object is represented by 4 or 6 hierarchical models (mixture of models). These mixture components account for pose/viewpoint changes.
8 Hierarchical Part Based Models: (4) The object model has variables: p 1. represents the position of the parts. 2. V specifies which mixture component (e.g. pose). 3. y specifies whether the object is present or not. 4. model parameter (to be learnt). Note: during learning the part positions p and the pose V are unknown so they are latent variables and will be expressed as h ( V, p)
9 Energy of the Model: The energy of the model is defined to be: ( x, y, h) where x is the image in the region. The object is detected dby solving: li y*, h* arg max ( x, y, h) If y* 1 then we have detected the object. If so, h* ( p*, V *) specifies the mixture component and the positions of the parts.
10 Energy of the Model: There are three types of potential terms ( x, y, h ) (1) Spatial terms shape ( y, h) which specify the distribution on the positions of the parts. (2) Data terms for the edges of the object HOG ( x, y, h) defined using HOG features. (3) Regional appearance data terms ( x, y, h) HOW defined by histograms of words (HOWs using grey SIFT features and K means).

")
 Dense sampling:")
11 Energy of the Model: HOGs and HOWs Edge like: Histogram of Oriented Gradients (Upper row) Regional: Histogram Of Words (Bottom row) Dense sampling: HOGs HOWs
12 Object Detection To detect an object requiring solving: y*, h* arg max ( x, y, h) for each image region. We solve this by scanning over the subwindows of the image, use dynamic programming to estimate the part positions p and do exhaustive search over the y & V
13 Learning by Latent SVM The input to learning is a set of labeled image regions. {( x _ i, y _ i) : i 1,..., N} Learning require us to estimate the parameters While simultaneously estimating the hidden variables h ( p, V )
14 Latent SVM Learning We use Yu and Joachim s (2009) formulation of latent SVM. This specifies a non convex criterion to be minimized. This can be re expressed in terms of a convex plus a concave part. min w 1 2 N w 2 C max[ w( xi, y, h) L( yi, y, h)] max[ w( xi, yi, h)] y, h h i1 1 min w 2 w 2 C N i 1 max[ w( x, y, h i y, h) L( y, i y, h)] C N i1 max[ w( x, h i yi, h)]
15 Latent SVM Learning Yu and Joachims (2009) propose the CCCP algorithm (Yuille and Rangarajan 2001) to minimize this criterion. This iterates between estimating the hidden variables and the parameters (like the EM algorithm). We propose a variant incremental CCCP which is faster. Result: our method works well for learning the parameters without complex initialization.
16 Learning Algorithm: Incremental CCCP Iterative Algorithm: Step 1: fill in the latent positions with best score(dp) Step 2: solve the structural SVM problem using partial negative training set (incrementally enlarge). Initialization: No pretraining (no clustering). No displacement of all nodes (no deformation). Pose assignment: maximum overlapping Simultaneous uta multi layer ut learning
17 Kernels We use a quasi linear kernel for the HOW features, linear kernels of the HOGs and for the spatial terms. We use: (i) equal weights for HOGs and HOWs (ii) equal weights for all nodes at all layers (iii) same weights for all object categories. Note: tuning the weights for different categories may improve the performance.
18 Post processing: Context Modeling Post processing: Rescoring the detection results Context modeling: SVM+ contextual features best detection scores of 20 classes, locations, recognition scores of 20 classes Recognition scores (Lazebnik CVPR06, Van de Sande PAMI 2010, Bosch CIVR07) SVM + spatial pyramid + HOWs (no latent position variable)
19 Experiments on Pascal or 6 mixture components/poses. All other parameter settings (C, the relative weights of appearance features, the number of visual words, etc.) are identical for all categories. 300 visual words: one round of K means.









20 Detection Results on PASCAL 2010: Cat











21 Horse













22 Car







23 Bus
24 Comparisons on PASCAL 2010 Mean Average Precision (map) is reported. Note: the calculations of AP used in 2010 and 2009 are different. Methods MIT UCLA NLPR NUS UoCTTI UVA UCI (trained on 2010) incomplete Test on Test on
25 Conclusion Objects are represented by mixture of Hierarchical Models of parts. The energy for the model contains spatial terms, edge like terms (HOGs), and regional appearance terms (HOWs). We learn the model parameter by a variant of latent SVM incremental CCCP which only requires simple initialization. The code will be available soon. Current and future work Increase the number of components/poses Part sharing
A Discriminatively Trained, Multiscale, Deformable Part Model
 A Discriminatively Trained, Multiscale, Deformable Part Model by Pedro Felzenszwalb, David McAllester, and Deva Ramanan CS381V Visual Recognition - Paper Presentation Slide credit: Duan Tran Slide credit:
A Discriminatively Trained, Multiscale, Deformable Part Model by Pedro Felzenszwalb, David McAllester, and Deva Ramanan CS381V Visual Recognition - Paper Presentation Slide credit: Duan Tran Slide credit:
Development in Object Detection. Junyuan Lin May 4th
 Development in Object Detection Junyuan Lin May 4th Line of Research [1] N. Dalal and B. Triggs. Histograms of oriented gradients for human detection, CVPR 2005. HOG Feature template [2] P. Felzenszwalb,
Development in Object Detection Junyuan Lin May 4th Line of Research [1] N. Dalal and B. Triggs. Histograms of oriented gradients for human detection, CVPR 2005. HOG Feature template [2] P. Felzenszwalb,
Category-level localization
 Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Object Detection with Discriminatively Trained Part Based Models
 Object Detection with Discriminatively Trained Part Based Models Pedro F. Felzenszwelb, Ross B. Girshick, David McAllester and Deva Ramanan Presented by Fabricio Santolin da Silva Kaustav Basu Some slides
Object Detection with Discriminatively Trained Part Based Models Pedro F. Felzenszwelb, Ross B. Girshick, David McAllester and Deva Ramanan Presented by Fabricio Santolin da Silva Kaustav Basu Some slides
Segmentation as Selective Search for Object Recognition in ILSVRC2011
 Segmentation as Selective Search for Object Recognition in ILSVRC2011 Koen van de Sande Jasper Uijlings Arnold Smeulders Theo Gevers Nicu Sebe Cees Snoek University of Amsterdam, University of Trento ILSVRC2011
Segmentation as Selective Search for Object Recognition in ILSVRC2011 Koen van de Sande Jasper Uijlings Arnold Smeulders Theo Gevers Nicu Sebe Cees Snoek University of Amsterdam, University of Trento ILSVRC2011
Detection III: Analyzing and Debugging Detection Methods
 CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
Learning Representations for Visual Object Class Recognition
 Learning Representations for Visual Object Class Recognition Marcin Marszałek Cordelia Schmid Hedi Harzallah Joost van de Weijer LEAR, INRIA Grenoble, Rhône-Alpes, France October 15th, 2007 Bag-of-Features
Learning Representations for Visual Object Class Recognition Marcin Marszałek Cordelia Schmid Hedi Harzallah Joost van de Weijer LEAR, INRIA Grenoble, Rhône-Alpes, France October 15th, 2007 Bag-of-Features
Modeling 3D viewpoint for part-based object recognition of rigid objects
 Modeling 3D viewpoint for part-based object recognition of rigid objects Joshua Schwartz Department of Computer Science Cornell University jdvs@cs.cornell.edu Abstract Part-based object models based on
Modeling 3D viewpoint for part-based object recognition of rigid objects Joshua Schwartz Department of Computer Science Cornell University jdvs@cs.cornell.edu Abstract Part-based object models based on
Object Recognition with Deformable Models
 Object Recognition with Deformable Models Pedro F. Felzenszwalb Department of Computer Science University of Chicago Joint work with: Dan Huttenlocher, Joshua Schwartz, David McAllester, Deva Ramanan.
Object Recognition with Deformable Models Pedro F. Felzenszwalb Department of Computer Science University of Chicago Joint work with: Dan Huttenlocher, Joshua Schwartz, David McAllester, Deva Ramanan.
Deformable Part Models with Individual Part Scaling
 DUBOUT, FLEURET: DEFORMABLE PART MODELS WITH INDIVIDUAL PART SCALING 1 Deformable Part Models with Individual Part Scaling Charles Dubout charles.dubout@idiap.ch François Fleuret francois.fleuret@idiap.ch
DUBOUT, FLEURET: DEFORMABLE PART MODELS WITH INDIVIDUAL PART SCALING 1 Deformable Part Models with Individual Part Scaling Charles Dubout charles.dubout@idiap.ch François Fleuret francois.fleuret@idiap.ch
Part based models for recognition. Kristen Grauman
 Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Find that! Visual Object Detection Primer
 Find that! Visual Object Detection Primer SkTech/MIT Innovation Workshop August 16, 2012 Dr. Tomasz Malisiewicz tomasz@csail.mit.edu Find that! Your Goals...imagine one such system that drives information
Find that! Visual Object Detection Primer SkTech/MIT Innovation Workshop August 16, 2012 Dr. Tomasz Malisiewicz tomasz@csail.mit.edu Find that! Your Goals...imagine one such system that drives information
Fast, Accurate Detection of 100,000 Object Classes on a Single Machine
 Fast, Accurate Detection of 100,000 Object Classes on a Single Machine Thomas Dean etal. Google, Mountain View, CA CVPR 2013 best paper award Presented by: Zhenhua Wang 2013.12.10 Outline Background This
Fast, Accurate Detection of 100,000 Object Classes on a Single Machine Thomas Dean etal. Google, Mountain View, CA CVPR 2013 best paper award Presented by: Zhenhua Wang 2013.12.10 Outline Background This
A Discriminatively Trained, Multiscale, Deformable Part Model
 A Discriminatively Trained, Multiscale, Deformable Part Model Pedro Felzenszwalb University of Chicago pff@cs.uchicago.edu David McAllester Toyota Technological Institute at Chicago mcallester@tti-c.org
A Discriminatively Trained, Multiscale, Deformable Part Model Pedro Felzenszwalb University of Chicago pff@cs.uchicago.edu David McAllester Toyota Technological Institute at Chicago mcallester@tti-c.org
Large-Scale Live Active Learning: Training Object Detectors with Crawled Data and Crowds
 Large-Scale Live Active Learning: Training Object Detectors with Crawled Data and Crowds Sudheendra Vijayanarasimhan Kristen Grauman Department of Computer Science University of Texas at Austin Austin,
Large-Scale Live Active Learning: Training Object Detectors with Crawled Data and Crowds Sudheendra Vijayanarasimhan Kristen Grauman Department of Computer Science University of Texas at Austin Austin,
Selective Search for Object Recognition
 Selective Search for Object Recognition Uijlings et al. Schuyler Smith Overview Introduction Object Recognition Selective Search Similarity Metrics Results Object Recognition Kitten Goal: Problem: Where
Selective Search for Object Recognition Uijlings et al. Schuyler Smith Overview Introduction Object Recognition Selective Search Similarity Metrics Results Object Recognition Kitten Goal: Problem: Where
Part-based Visual Tracking with Online Latent Structural Learning: Supplementary Material
 Part-based Visual Tracking with Online Latent Structural Learning: Supplementary Material Rui Yao, Qinfeng Shi 2, Chunhua Shen 2, Yanning Zhang, Anton van den Hengel 2 School of Computer Science, Northwestern
Part-based Visual Tracking with Online Latent Structural Learning: Supplementary Material Rui Yao, Qinfeng Shi 2, Chunhua Shen 2, Yanning Zhang, Anton van den Hengel 2 School of Computer Science, Northwestern
Learning Object Representations for Visual Object Class Recognition
 Learning Object Representations for Visual Object Class Recognition Marcin Marszalek, Cordelia Schmid, Hedi Harzallah, Joost Van de Weijer To cite this version: Marcin Marszalek, Cordelia Schmid, Hedi
Learning Object Representations for Visual Object Class Recognition Marcin Marszalek, Cordelia Schmid, Hedi Harzallah, Joost Van de Weijer To cite this version: Marcin Marszalek, Cordelia Schmid, Hedi
Part-Based Models for Object Class Recognition Part 3
 High Level Computer Vision! Part-Based Models for Object Class Recognition Part 3 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de! http://www.d2.mpi-inf.mpg.de/cv ! State-of-the-Art
High Level Computer Vision! Part-Based Models for Object Class Recognition Part 3 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de! http://www.d2.mpi-inf.mpg.de/cv ! State-of-the-Art
Coupling-and-Decoupling: A Hierarchical Model for Occlusion-Free Car Detection
 Coupling-and-Decoupling: A Hierarchical Model for Occlusion-Free Car Detection Bo Li 1,2,3, Tianfu Wu 2,3, Wenze Hu 3,4 and Mingtao Pei 1 1 Beijing Lab of Intelligent Information, School of Computer Science
Coupling-and-Decoupling: A Hierarchical Model for Occlusion-Free Car Detection Bo Li 1,2,3, Tianfu Wu 2,3, Wenze Hu 3,4 and Mingtao Pei 1 1 Beijing Lab of Intelligent Information, School of Computer Science
Boosted Local Structured HOG-LBP for Object Localization
 Boosted Local Structured HOG-LBP for Object Localization Junge Zhang, Kaiqi Huang, Yinan Yu and Tieniu Tan National Laboratory of Pattern Recognition Institute of Automation, Chinese Academy of Sciences
Boosted Local Structured HOG-LBP for Object Localization Junge Zhang, Kaiqi Huang, Yinan Yu and Tieniu Tan National Laboratory of Pattern Recognition Institute of Automation, Chinese Academy of Sciences
Learning to Localize Objects with Structured Output Regression
 Learning to Localize Objects with Structured Output Regression Matthew Blaschko and Christopher Lampert ECCV 2008 Best Student Paper Award Presentation by Jaeyong Sung and Yiting Xie 1 Object Localization
Learning to Localize Objects with Structured Output Regression Matthew Blaschko and Christopher Lampert ECCV 2008 Best Student Paper Award Presentation by Jaeyong Sung and Yiting Xie 1 Object Localization
Modeling Occlusion by Discriminative AND-OR Structures
 2013 IEEE International Conference on Computer Vision Modeling Occlusion by Discriminative AND-OR Structures Bo Li, Wenze Hu, Tianfu Wu and Song-Chun Zhu Beijing Lab of Intelligent Information Technology,
2013 IEEE International Conference on Computer Vision Modeling Occlusion by Discriminative AND-OR Structures Bo Li, Wenze Hu, Tianfu Wu and Song-Chun Zhu Beijing Lab of Intelligent Information Technology,
Self-Paced Learning for Semisupervised Image Classification
 Self-Paced Learning for Semisupervised Image Classification Kevin Miller Stanford University Palo Alto, CA kjmiller@stanford.edu Abstract In this project, we apply three variants of self-paced learning
Self-Paced Learning for Semisupervised Image Classification Kevin Miller Stanford University Palo Alto, CA kjmiller@stanford.edu Abstract In this project, we apply three variants of self-paced learning
Incorporating Structural Alternatives and Sharing into Hierarchy for Multiclass Object Recognition and Detection
 Incorporating Structural Alternatives and Sharing into Hierarchy for Multiclass Object Recognition and Detection Xiaolong Wang 1, Liang Lin 1, Lichao Huang 1, Shuicheng Yan 2 1 Sun Yat-Sen University,
Incorporating Structural Alternatives and Sharing into Hierarchy for Multiclass Object Recognition and Detection Xiaolong Wang 1, Liang Lin 1, Lichao Huang 1, Shuicheng Yan 2 1 Sun Yat-Sen University,
Category-level Localization
 Category-level Localization Andrew Zisserman Visual Geometry Group University of Oxford http://www.robots.ox.ac.uk/~vgg Includes slides from: Ondra Chum, Alyosha Efros, Mark Everingham, Pedro Felzenszwalb,
Category-level Localization Andrew Zisserman Visual Geometry Group University of Oxford http://www.robots.ox.ac.uk/~vgg Includes slides from: Ondra Chum, Alyosha Efros, Mark Everingham, Pedro Felzenszwalb,
Bag-of-features. Cordelia Schmid
 Bag-of-features for category classification Cordelia Schmid Visual search Particular objects and scenes, large databases Category recognition Image classification: assigning a class label to the image
Bag-of-features for category classification Cordelia Schmid Visual search Particular objects and scenes, large databases Category recognition Image classification: assigning a class label to the image
Pedestrian Detection Using Structured SVM
 Pedestrian Detection Using Structured SVM Wonhui Kim Stanford University Department of Electrical Engineering wonhui@stanford.edu Seungmin Lee Stanford University Department of Electrical Engineering smlee729@stanford.edu.
Pedestrian Detection Using Structured SVM Wonhui Kim Stanford University Department of Electrical Engineering wonhui@stanford.edu Seungmin Lee Stanford University Department of Electrical Engineering smlee729@stanford.edu.
Part-based models. Lecture 10
 Part-based models Lecture 10 Overview Representation Location Appearance Generative interpretation Learning Distance transforms Other approaches using parts Felzenszwalb, Girshick, McAllester, Ramanan
Part-based models Lecture 10 Overview Representation Location Appearance Generative interpretation Learning Distance transforms Other approaches using parts Felzenszwalb, Girshick, McAllester, Ramanan
Structured output regression for detection with partial truncation
 Structured output regression for detection with partial truncation Andrea Vedaldi Andrew Zisserman Department of Engineering University of Oxford Oxford, UK {vedaldi,az}@robots.ox.ac.uk Abstract We develop
Structured output regression for detection with partial truncation Andrea Vedaldi Andrew Zisserman Department of Engineering University of Oxford Oxford, UK {vedaldi,az}@robots.ox.ac.uk Abstract We develop
Rich feature hierarchies for accurate object detection and semantic segmentation
 Rich feature hierarchies for accurate object detection and semantic segmentation BY; ROSS GIRSHICK, JEFF DONAHUE, TREVOR DARRELL AND JITENDRA MALIK PRESENTER; MUHAMMAD OSAMA Object detection vs. classification
Rich feature hierarchies for accurate object detection and semantic segmentation BY; ROSS GIRSHICK, JEFF DONAHUE, TREVOR DARRELL AND JITENDRA MALIK PRESENTER; MUHAMMAD OSAMA Object detection vs. classification
Every Picture Tells a Story: Generating Sentences from Images
 Every Picture Tells a Story: Generating Sentences from Images Ali Farhadi, Mohsen Hejrati, Mohammad Amin Sadeghi, Peter Young, Cyrus Rashtchian, Julia Hockenmaier, David Forsyth University of Illinois
Every Picture Tells a Story: Generating Sentences from Images Ali Farhadi, Mohsen Hejrati, Mohammad Amin Sadeghi, Peter Young, Cyrus Rashtchian, Julia Hockenmaier, David Forsyth University of Illinois
Recognizing human actions in still images: a study of bag-of-features and part-based representations
 DELAITRE, LAPTEV, SIVIC: RECOGNIZING HUMAN ACTIONS IN STILL IMAGES. 1 Recognizing human actions in still images: a study of bag-of-features and part-based representations Vincent Delaitre 1 vincent.delaitre@ens-lyon.org
DELAITRE, LAPTEV, SIVIC: RECOGNIZING HUMAN ACTIONS IN STILL IMAGES. 1 Recognizing human actions in still images: a study of bag-of-features and part-based representations Vincent Delaitre 1 vincent.delaitre@ens-lyon.org
Beyond bags of features: Adding spatial information. Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba
 Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Object Detection by 3D Aspectlets and Occlusion Reasoning
 Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
High Level Computer Vision
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de http://www.d2.mpi-inf.mpg.de/cv Please Note No
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de http://www.d2.mpi-inf.mpg.de/cv Please Note No
PASCAL VOC Classification: Local Features vs. Deep Features. Shuicheng YAN, NUS
 PASCAL VOC Classification: Local Features vs. Deep Features Shuicheng YAN, NUS PASCAL VOC Why valuable? Multi-label, Real Scenarios! Visual Object Recognition Object Classification Object Detection Object
PASCAL VOC Classification: Local Features vs. Deep Features Shuicheng YAN, NUS PASCAL VOC Why valuable? Multi-label, Real Scenarios! Visual Object Recognition Object Classification Object Detection Object
Detecting and Parsing of Visual Objects: Humans and Animals. Alan Yuille (UCLA)
") Detecting and Parsing of Visual Objects: Humans and Animals Alan Yuille (UCLA) Summary This talk describes recent work on detection and parsing visual objects. The methods represent objects in terms of
Detecting and Parsing of Visual Objects: Humans and Animals Alan Yuille (UCLA) Summary This talk describes recent work on detection and parsing visual objects. The methods represent objects in terms of
Multiple Kernel Learning for Emotion Recognition in the Wild
 Multiple Kernel Learning for Emotion Recognition in the Wild Karan Sikka, Karmen Dykstra, Suchitra Sathyanarayana, Gwen Littlewort and Marian S. Bartlett Machine Perception Laboratory UCSD EmotiW Challenge,
Multiple Kernel Learning for Emotion Recognition in the Wild Karan Sikka, Karmen Dykstra, Suchitra Sathyanarayana, Gwen Littlewort and Marian S. Bartlett Machine Perception Laboratory UCSD EmotiW Challenge,
Multi-Component Models for Object Detection
 Multi-Component Models for Object Detection Chunhui Gu 1, Pablo Arbeláez 2, Yuanqing Lin 3, Kai Yu 4, and Jitendra Malik 2 1 Google Inc., Mountain View, CA, USA, chunhui@google.com 2 UC Berkeley, Berkeley,
Multi-Component Models for Object Detection Chunhui Gu 1, Pablo Arbeláez 2, Yuanqing Lin 3, Kai Yu 4, and Jitendra Malik 2 1 Google Inc., Mountain View, CA, USA, chunhui@google.com 2 UC Berkeley, Berkeley,
DPM Configurations for Human Interaction Detection
 DPM Configurations for Human Interaction Detection Coert van Gemeren Ronald Poppe Remco C. Veltkamp Interaction Technology Group, Department of Information and Computing Sciences, Utrecht University, The
DPM Configurations for Human Interaction Detection Coert van Gemeren Ronald Poppe Remco C. Veltkamp Interaction Technology Group, Department of Information and Computing Sciences, Utrecht University, The
Graphical Models for Computer Vision
 Graphical Models for Computer Vision Pedro F Felzenszwalb Brown University Joint work with Dan Huttenlocher, Joshua Schwartz, Ross Girshick, David McAllester, Deva Ramanan, Allie Shapiro, John Oberlin
Graphical Models for Computer Vision Pedro F Felzenszwalb Brown University Joint work with Dan Huttenlocher, Joshua Schwartz, Ross Girshick, David McAllester, Deva Ramanan, Allie Shapiro, John Oberlin
Object Detection with YOLO on Artwork Dataset
 Object Detection with YOLO on Artwork Dataset Yihui He Computer Science Department, Xi an Jiaotong University heyihui@stu.xjtu.edu.cn Abstract Person: 0.64 Horse: 0.28 I design a small object detection
Object Detection with YOLO on Artwork Dataset Yihui He Computer Science Department, Xi an Jiaotong University heyihui@stu.xjtu.edu.cn Abstract Person: 0.64 Horse: 0.28 I design a small object detection
Nested Pictorial Structures
 Nested Pictorial Structures Steve Gu and Ying Zheng and Carlo Tomasi Department of Computer Science, Duke University, NC, USA 27705 {steve,yuanqi,tomasi}@cs.duke.edu Abstract. We propose a theoretical
Nested Pictorial Structures Steve Gu and Ying Zheng and Carlo Tomasi Department of Computer Science, Duke University, NC, USA 27705 {steve,yuanqi,tomasi}@cs.duke.edu Abstract. We propose a theoretical
CS 1674: Intro to Computer Vision. Object Recognition. Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018
 CS 1674: Intro to Computer Vision Object Recognition Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018 Different Flavors of Object Recognition Semantic Segmentation Classification + Localization
CS 1674: Intro to Computer Vision Object Recognition Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018 Different Flavors of Object Recognition Semantic Segmentation Classification + Localization
An Efficient Divide-and-Conquer Cascade for Nonlinear Object Detection
 An Efficient Divide-and-Conquer Cascade for Nonlinear Object Detection Christoph H. Lampert Max Planck Institute for Biological Cybernetics, Tübingen, Germany chl@tuebingen.mpg.de Abstract We introduce
An Efficient Divide-and-Conquer Cascade for Nonlinear Object Detection Christoph H. Lampert Max Planck Institute for Biological Cybernetics, Tübingen, Germany chl@tuebingen.mpg.de Abstract We introduce
Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection
 Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection Hyunghoon Cho and David Wu December 10, 2010 1 Introduction Given its performance in recent years' PASCAL Visual
Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection Hyunghoon Cho and David Wu December 10, 2010 1 Introduction Given its performance in recent years' PASCAL Visual
Modern Object Detection. Most slides from Ali Farhadi
 Modern Object Detection Most slides from Ali Farhadi Comparison of Classifiers assuming x in {0 1} Learning Objective Training Inference Naïve Bayes maximize j i logp + logp ( x y ; θ ) ( y ; θ ) i ij
Modern Object Detection Most slides from Ali Farhadi Comparison of Classifiers assuming x in {0 1} Learning Objective Training Inference Naïve Bayes maximize j i logp + logp ( x y ; θ ) ( y ; θ ) i ij
Analysis: TextonBoost and Semantic Texton Forests. Daniel Munoz Februrary 9, 2009
 Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Seeing 3D chairs: Exemplar part-based 2D-3D alignment using a large dataset of CAD models
 Seeing 3D chairs: Exemplar part-based 2D-3D alignment using a large dataset of CAD models Mathieu Aubry (INRIA) Daniel Maturana (CMU) Alexei Efros (UC Berkeley) Bryan Russell (Intel) Josef Sivic (INRIA)
Seeing 3D chairs: Exemplar part-based 2D-3D alignment using a large dataset of CAD models Mathieu Aubry (INRIA) Daniel Maturana (CMU) Alexei Efros (UC Berkeley) Bryan Russell (Intel) Josef Sivic (INRIA)
Previously. Part-based and local feature models for generic object recognition. Bag-of-words model 4/20/2011
 Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES
 IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES Pin-Syuan Huang, Jing-Yi Tsai, Yu-Fang Wang, and Chun-Yi Tsai Department of Computer Science and Information Engineering, National Taitung University,
IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES Pin-Syuan Huang, Jing-Yi Tsai, Yu-Fang Wang, and Chun-Yi Tsai Department of Computer Science and Information Engineering, National Taitung University,
Feature Sets and Dimensionality Reduction for Visual Object Detection
 HUSSAIN, TRIGGS: FEATURE SETS AND DIMENSIONALITY REDUCTION... Feature Sets and Dimensionality Reduction for Visual Object Detection Sibt ul Hussain Sibt.ul.Hussain@gmail.com Bill Triggs Bill.Triggs@imag.fr
HUSSAIN, TRIGGS: FEATURE SETS AND DIMENSIONALITY REDUCTION... Feature Sets and Dimensionality Reduction for Visual Object Detection Sibt ul Hussain Sibt.ul.Hussain@gmail.com Bill Triggs Bill.Triggs@imag.fr
Action recognition in videos
 Action recognition in videos Cordelia Schmid INRIA Grenoble Joint work with V. Ferrari, A. Gaidon, Z. Harchaoui, A. Klaeser, A. Prest, H. Wang Action recognition - goal Short actions, i.e. drinking, sit
Action recognition in videos Cordelia Schmid INRIA Grenoble Joint work with V. Ferrari, A. Gaidon, Z. Harchaoui, A. Klaeser, A. Prest, H. Wang Action recognition - goal Short actions, i.e. drinking, sit
Semantic Pooling for Image Categorization using Multiple Kernel Learning
 Semantic Pooling for Image Categorization using Multiple Kernel Learning Thibaut Durand (1,2), Nicolas Thome (1), Matthieu Cord (1), David Picard (2) (1) Sorbonne Universités, UPMC Univ Paris 06, UMR 7606,
Semantic Pooling for Image Categorization using Multiple Kernel Learning Thibaut Durand (1,2), Nicolas Thome (1), Matthieu Cord (1), David Picard (2) (1) Sorbonne Universités, UPMC Univ Paris 06, UMR 7606,
Improved Fisher Vector for Large Scale Image Classification XRCE's participation for ILSVRC
 Improved Fisher Vector for Large Scale Image Classification XRCE's participation for ILSVRC Jorge Sánchez, Florent Perronnin and Thomas Mensink Xerox Research Centre Europe (XRCE) Overview Fisher Vector
Improved Fisher Vector for Large Scale Image Classification XRCE's participation for ILSVRC Jorge Sánchez, Florent Perronnin and Thomas Mensink Xerox Research Centre Europe (XRCE) Overview Fisher Vector
Multiple Kernels for Object Detection
 Multiple Kernels for Object Detection Andrea Vedaldi Varun Gulshan Manik Varma 2 Andrew Zisserman Department of Engineering Science University of Oxford {vedaldi,varun,az}@robots.ox.ac.uk 2 Microsoft Research
Multiple Kernels for Object Detection Andrea Vedaldi Varun Gulshan Manik Varma 2 Andrew Zisserman Department of Engineering Science University of Oxford {vedaldi,varun,az}@robots.ox.ac.uk 2 Microsoft Research
Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network
 Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network Anurag Arnab and Philip H.S. Torr University of Oxford {anurag.arnab, philip.torr}@eng.ox.ac.uk 1. Introduction
Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network Anurag Arnab and Philip H.S. Torr University of Oxford {anurag.arnab, philip.torr}@eng.ox.ac.uk 1. Introduction
CS6716 Pattern Recognition
 CS6716 Pattern Recognition Aaron Bobick School of Interactive Computing Administrivia PS3 is out now, due April 8. Today chapter 12 of the Hastie book. Slides (and entertainment) from Moataz Al-Haj Three
CS6716 Pattern Recognition Aaron Bobick School of Interactive Computing Administrivia PS3 is out now, due April 8. Today chapter 12 of the Hastie book. Slides (and entertainment) from Moataz Al-Haj Three
Object recognition (part 2)
") Object recognition (part 2) CSE P 576 Larry Zitnick (larryz@microsoft.com) 1 2 3 Support Vector Machines Modified from the slides by Dr. Andrew W. Moore http://www.cs.cmu.edu/~awm/tutorials Linear Classifiers
Object recognition (part 2) CSE P 576 Larry Zitnick (larryz@microsoft.com) 1 2 3 Support Vector Machines Modified from the slides by Dr. Andrew W. Moore http://www.cs.cmu.edu/~awm/tutorials Linear Classifiers
Selection of Scale-Invariant Parts for Object Class Recognition
 Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
ImageCLEF 2011
 SZTAKI @ ImageCLEF 2011 Bálint Daróczy joint work with András Benczúr, Róbert Pethes Data Mining and Web Search Group Computer and Automation Research Institute Hungarian Academy of Sciences Training/test
SZTAKI @ ImageCLEF 2011 Bálint Daróczy joint work with András Benczúr, Róbert Pethes Data Mining and Web Search Group Computer and Automation Research Institute Hungarian Academy of Sciences Training/test
Whatis thespatial Extent ofan Object?
 Whatis thespatial Extent ofan Object? J.R.R.Uijlings A.W.M.Smeulders Intelligent Systems LabAmsterdam, Informatics Institute, University of Amsterdam. {jrr.uijlings,arnoldsmeulders}@uva.nl R.J.H.Scha 2
Whatis thespatial Extent ofan Object? J.R.R.Uijlings A.W.M.Smeulders Intelligent Systems LabAmsterdam, Informatics Institute, University of Amsterdam. {jrr.uijlings,arnoldsmeulders}@uva.nl R.J.H.Scha 2
A Hierarchical Compositional System for Rapid Object Detection
 A Hierarchical Compositional System for Rapid Object Detection Long Zhu and Alan Yuille Department of Statistics University of California at Los Angeles Los Angeles, CA 90095 {lzhu,yuille}@stat.ucla.edu
A Hierarchical Compositional System for Rapid Object Detection Long Zhu and Alan Yuille Department of Statistics University of California at Los Angeles Los Angeles, CA 90095 {lzhu,yuille}@stat.ucla.edu
Recent Progress on Object Classification and Detection
 Recent Progress on Object Classification and Detection Tieniu Tan, Yongzhen Huang, and Junge Zhang Center for Research on Intelligent Perception and Computing (CRIPAC), National Laboratory of Pattern Recognition
Recent Progress on Object Classification and Detection Tieniu Tan, Yongzhen Huang, and Junge Zhang Center for Research on Intelligent Perception and Computing (CRIPAC), National Laboratory of Pattern Recognition
Deep learning for object detection. Slides from Svetlana Lazebnik and many others
 Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Spatial Localization and Detection. Lecture 8-1
 Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Automatic Discovery of Meaningful Object Parts with Latent CRFs
 Automatic Discovery of Meaningful Object Parts with Latent CRFs Paul Schnitzspan 1 Stefan Roth 1 Bernt Schiele 1,2 1 Department of Computer Science, TU Darmstadt 2 MPI Informatics, Saarbrücken Abstract
Automatic Discovery of Meaningful Object Parts with Latent CRFs Paul Schnitzspan 1 Stefan Roth 1 Bernt Schiele 1,2 1 Department of Computer Science, TU Darmstadt 2 MPI Informatics, Saarbrücken Abstract
HiRF: Hierarchical Random Field for Collective Activity Recognition in Videos
 HiRF: Hierarchical Random Field for Collective Activity Recognition in Videos Mohamed R. Amer, Peng Lei, Sinisa Todorovic Oregon State University School of Electrical Engineering and Computer Science {amerm,
HiRF: Hierarchical Random Field for Collective Activity Recognition in Videos Mohamed R. Amer, Peng Lei, Sinisa Todorovic Oregon State University School of Electrical Engineering and Computer Science {amerm,
Joint learning of visual attributes, object classes and visual saliency
 Joint learning of visual attributes, object classes and visual saliency Gang Wang Dept. of Electrical and Computer Engineering University of Illinois at Urbana-Champaign gwang6@uiuc.edu David Forsyth Dept.
Joint learning of visual attributes, object classes and visual saliency Gang Wang Dept. of Electrical and Computer Engineering University of Illinois at Urbana-Champaign gwang6@uiuc.edu David Forsyth Dept.
Learning to Localize Objects with Structured Output Regression
 Learning to Localize Objects with Structured Output Regression Matthew B. Blaschko and Christoph H. Lampert Max Planck Institute for Biological Cybernetics 72076 Tübingen, Germany {blaschko,chl}@tuebingen.mpg.de
Learning to Localize Objects with Structured Output Regression Matthew B. Blaschko and Christoph H. Lampert Max Planck Institute for Biological Cybernetics 72076 Tübingen, Germany {blaschko,chl}@tuebingen.mpg.de
Structured Models in. Dan Huttenlocher. June 2010
 Structured Models in Computer Vision i Dan Huttenlocher June 2010 Structured Models Problems where output variables are mutually dependent or constrained E.g., spatial or temporal relations Such dependencies
Structured Models in Computer Vision i Dan Huttenlocher June 2010 Structured Models Problems where output variables are mutually dependent or constrained E.g., spatial or temporal relations Such dependencies
Category vs. instance recognition
 Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
TagProp: Discriminative Metric Learning in Nearest Neighbor Models for Image Annotation
 TagProp: Discriminative Metric Learning in Nearest Neighbor Models for Image Annotation Matthieu Guillaumin, Thomas Mensink, Jakob Verbeek, Cordelia Schmid LEAR team, INRIA Rhône-Alpes, Grenoble, France
TagProp: Discriminative Metric Learning in Nearest Neighbor Models for Image Annotation Matthieu Guillaumin, Thomas Mensink, Jakob Verbeek, Cordelia Schmid LEAR team, INRIA Rhône-Alpes, Grenoble, France
Beyond Sliding Windows: Object Localization by Efficient Subwindow Search
 Beyond Sliding Windows: Object Localization by Efficient Subwindow Search Christoph H. Lampert, Matthew B. Blaschko, & Thomas Hofmann Max Planck Institute for Biological Cybernetics Tübingen, Germany Google,
Beyond Sliding Windows: Object Localization by Efficient Subwindow Search Christoph H. Lampert, Matthew B. Blaschko, & Thomas Hofmann Max Planck Institute for Biological Cybernetics Tübingen, Germany Google,
Human detection using histogram of oriented gradients. Srikumar Ramalingam School of Computing University of Utah
 Human detection using histogram of oriented gradients Srikumar Ramalingam School of Computing University of Utah Reference Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection,
Human detection using histogram of oriented gradients Srikumar Ramalingam School of Computing University of Utah Reference Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection,
 https://en.wikipedia.org/wiki/the_dress Recap: Viola-Jones sliding window detector Fast detection through two mechanisms Quickly eliminate unlikely windows Use features that are fast to compute Viola
https://en.wikipedia.org/wiki/the_dress Recap: Viola-Jones sliding window detector Fast detection through two mechanisms Quickly eliminate unlikely windows Use features that are fast to compute Viola
Diagnosing Error in Object Detectors
 Diagnosing Error in Object Detectors Derek Hoiem Yodsawalai Chodpathumwan Qieyun Dai (presented by Yuduo Wu) Most of the slides are from Derek Hoiem's ECCV 2012 presentation Object detecion is a collecion
Diagnosing Error in Object Detectors Derek Hoiem Yodsawalai Chodpathumwan Qieyun Dai (presented by Yuduo Wu) Most of the slides are from Derek Hoiem's ECCV 2012 presentation Object detecion is a collecion
Regionlet Object Detector with Hand-crafted and CNN Feature
 Regionlet Object Detector with Hand-crafted and CNN Feature Xiaoyu Wang Research Xiaoyu Wang Research Ming Yang Horizon Robotics Shenghuo Zhu Alibaba Group Yuanqing Lin Baidu Overview of this section Regionlet
Regionlet Object Detector with Hand-crafted and CNN Feature Xiaoyu Wang Research Xiaoyu Wang Research Ming Yang Horizon Robotics Shenghuo Zhu Alibaba Group Yuanqing Lin Baidu Overview of this section Regionlet
Part-based and local feature models for generic object recognition
 Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Learning Visual Semantics: Models, Massive Computation, and Innovative Applications
 Learning Visual Semantics: Models, Massive Computation, and Innovative Applications Part II: Visual Features and Representations Liangliang Cao, IBM Watson Research Center Evolvement of Visual Features
Learning Visual Semantics: Models, Massive Computation, and Innovative Applications Part II: Visual Features and Representations Liangliang Cao, IBM Watson Research Center Evolvement of Visual Features
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 People Detection Some material for these slides comes from www.cs.cornell.edu/courses/cs4670/2012fa/lectures/lec32_object_recognition.ppt
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 People Detection Some material for these slides comes from www.cs.cornell.edu/courses/cs4670/2012fa/lectures/lec32_object_recognition.ppt
Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model
 Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model Johnson Hsieh (johnsonhsieh@gmail.com), Alexander Chia (alexchia@stanford.edu) Abstract -- Object occlusion presents a major
Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model Johnson Hsieh (johnsonhsieh@gmail.com), Alexander Chia (alexchia@stanford.edu) Abstract -- Object occlusion presents a major
Mining Discriminative Adjectives and Prepositions for Natural Scene Recognition
 Mining Discriminative Adjectives and Prepositions for Natural Scene Recognition Bangpeng Yao 1, Juan Carlos Niebles 2,3, Li Fei-Fei 1 1 Department of Computer Science, Princeton University, NJ 08540, USA
Mining Discriminative Adjectives and Prepositions for Natural Scene Recognition Bangpeng Yao 1, Juan Carlos Niebles 2,3, Li Fei-Fei 1 1 Department of Computer Science, Princeton University, NJ 08540, USA
Object Recognition II
 Object Recognition II Linda Shapiro EE/CSE 576 with CNN slides from Ross Girshick 1 Outline Object detection the task, evaluation, datasets Convolutional Neural Networks (CNNs) overview and history Region-based
Object Recognition II Linda Shapiro EE/CSE 576 with CNN slides from Ross Girshick 1 Outline Object detection the task, evaluation, datasets Convolutional Neural Networks (CNNs) overview and history Region-based
Histogram of Oriented Gradients (HOG) for Object Detection
 for Object Detection") Histogram of Oriented Gradients (HOG) for Object Detection Navneet DALAL Joint work with Bill TRIGGS and Cordelia SCHMID Goal & Challenges Goal: Detect and localise people in images and videos n Wide variety
Histogram of Oriented Gradients (HOG) for Object Detection Navneet DALAL Joint work with Bill TRIGGS and Cordelia SCHMID Goal & Challenges Goal: Detect and localise people in images and videos n Wide variety
Accurate Object Detection with Location Relaxation and Regionlets Re-localization
 Accurate Object Detection with Location Relaxation and Regionlets Re-localization Chengjiang Long 1, Xiaoyu Wang 2, Gang Hua 1, Ming Yang 3, and Yuanqing Lin 2 1 Stevens Institute of Technology, Hoboken,
Accurate Object Detection with Location Relaxation and Regionlets Re-localization Chengjiang Long 1, Xiaoyu Wang 2, Gang Hua 1, Ming Yang 3, and Yuanqing Lin 2 1 Stevens Institute of Technology, Hoboken,
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Comparing Local Feature Descriptors in plsa-based Image Models
 Comparing Local Feature Descriptors in plsa-based Image Models Eva Hörster 1,ThomasGreif 1, Rainer Lienhart 1, and Malcolm Slaney 2 1 Multimedia Computing Lab, University of Augsburg, Germany {hoerster,lienhart}@informatik.uni-augsburg.de
Comparing Local Feature Descriptors in plsa-based Image Models Eva Hörster 1,ThomasGreif 1, Rainer Lienhart 1, and Malcolm Slaney 2 1 Multimedia Computing Lab, University of Augsburg, Germany {hoerster,lienhart}@informatik.uni-augsburg.de
Fully Convolutional Networks for Semantic Segmentation
 Fully Convolutional Networks for Semantic Segmentation Jonathan Long* Evan Shelhamer* Trevor Darrell UC Berkeley Chaim Ginzburg for Deep Learning seminar 1 Semantic Segmentation Define a pixel-wise labeling
Fully Convolutional Networks for Semantic Segmentation Jonathan Long* Evan Shelhamer* Trevor Darrell UC Berkeley Chaim Ginzburg for Deep Learning seminar 1 Semantic Segmentation Define a pixel-wise labeling
DPM Score Regressor for Detecting Occluded Humans from Depth Images
 DPM Score Regressor for Detecting Occluded Humans from Depth Images Tsuyoshi Usami, Hiroshi Fukui, Yuji Yamauchi, Takayoshi Yamashita and Hironobu Fujiyoshi Email: usami915@vision.cs.chubu.ac.jp Email:
DPM Score Regressor for Detecting Occluded Humans from Depth Images Tsuyoshi Usami, Hiroshi Fukui, Yuji Yamauchi, Takayoshi Yamashita and Hironobu Fujiyoshi Email: usami915@vision.cs.chubu.ac.jp Email:
on learned visual embedding patrick pérez Allegro Workshop Inria Rhônes-Alpes 22 July 2015
 on learned visual embedding patrick pérez Allegro Workshop Inria Rhônes-Alpes 22 July 2015 Vector visual representation Fixed-size image representation High-dim (100 100,000) Generic, unsupervised: BoW,
on learned visual embedding patrick pérez Allegro Workshop Inria Rhônes-Alpes 22 July 2015 Vector visual representation Fixed-size image representation High-dim (100 100,000) Generic, unsupervised: BoW,
Pedestrian Detection and Tracking in Images and Videos
 Pedestrian Detection and Tracking in Images and Videos Azar Fazel Stanford University azarf@stanford.edu Viet Vo Stanford University vtvo@stanford.edu Abstract The increase in population density and accessibility
Pedestrian Detection and Tracking in Images and Videos Azar Fazel Stanford University azarf@stanford.edu Viet Vo Stanford University vtvo@stanford.edu Abstract The increase in population density and accessibility
Automatic Discovery of Groups of Objects for Scene Understanding
 Automatic Discovery of Groups of Objects for Scene Understanding Congcong Li Cornell University cl758@cornell.edu Devi Parikh Toyota Technological Institute (Chicago) dparikh@ttic.edu Tsuhan Chen Cornell
Automatic Discovery of Groups of Objects for Scene Understanding Congcong Li Cornell University cl758@cornell.edu Devi Parikh Toyota Technological Institute (Chicago) dparikh@ttic.edu Tsuhan Chen Cornell
18 October, 2013 MVA ENS Cachan. Lecture 6: Introduction to graphical models Iasonas Kokkinos
 Machine Learning for Computer Vision 1 18 October, 2013 MVA ENS Cachan Lecture 6: Introduction to graphical models Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Center for Visual Computing Ecole Centrale Paris
Machine Learning for Computer Vision 1 18 October, 2013 MVA ENS Cachan Lecture 6: Introduction to graphical models Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Center for Visual Computing Ecole Centrale Paris
Subcategory-aware Object Classification
 2013 IEEE Conference on Computer Vision and Pattern Recognition Subcategory-aware Object Classification Jian Dong 1, Wei Xia 1, Qiang Chen 1, Jianshi Feng 1, Zhongyang Huang 2, Shuicheng Yan 1 1 Department
2013 IEEE Conference on Computer Vision and Pattern Recognition Subcategory-aware Object Classification Jian Dong 1, Wei Xia 1, Qiang Chen 1, Jianshi Feng 1, Zhongyang Huang 2, Shuicheng Yan 1 1 Department
CS229 Final Project Report. A Multi-Task Feature Learning Approach to Human Detection. Tiffany Low
 CS229 Final Project Report A Multi-Task Feature Learning Approach to Human Detection Tiffany Low tlow@stanford.edu Abstract We focus on the task of human detection using unsupervised pre-trained neutral
CS229 Final Project Report A Multi-Task Feature Learning Approach to Human Detection Tiffany Low tlow@stanford.edu Abstract We focus on the task of human detection using unsupervised pre-trained neutral
Object Category Detection. Slides mostly from Derek Hoiem
 Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Multiple-Person Tracking by Detection
 http://excel.fit.vutbr.cz Multiple-Person Tracking by Detection Jakub Vojvoda* Abstract Detection and tracking of multiple person is challenging problem mainly due to complexity of scene and large intra-class
http://excel.fit.vutbr.cz Multiple-Person Tracking by Detection Jakub Vojvoda* Abstract Detection and tracking of multiple person is challenging problem mainly due to complexity of scene and large intra-class