Image Fusion With a Dental Panoramic X-ray Image and Face Image Acquired With a KINECT
|
|
|
- Barnard Lucas
- 5 years ago
- Views:
Transcription

1 Image Fuson Wth a Dental Panoramc X-ray Image and Face Image Acqured Wth a KINECT Kohe Kawa* 1, Koch Ogawa* 1, Aktosh Katumata* 2 * 1 Graduate School of Engneerng, Hose Unversty * 2 School of Dentstry, Asah Unversty




2 1. Introducton Detector CT system X-ray tube 3D scanner Reconstructed mages Reconstructed mages





3 2. Introducton 3D face mage 3D bone mage fuson Dagnoss and treatment CT system+3d scanner GALILEOS comfort plus(srona)


4 3. Introducton Conventonal method Dental X-ray CT system + 3D scanner Proposed method Dental panoramc X-ray system + KINECT Low cost and compact Low cost and popular
5 4. Proposed system We proposed a panoramc X-ray system wth a KINECT. KINECT nfrared projector nfrared camera RGB camera X-ray tube detector RGB mage resoluton Depth mage resoluton Depth range RGB camera vew Depth camera vew Infrared wavelength Specfcatons (30 fps) (30 fps) 400~4000 mm (horzontal) 62 deg. (vertcal) 48 deg. (horzontal) 57 deg. (vertcal) 43 deg. 830 nm mrror lght path >40cm KINECT
 Defne the")




6 5. Method (Data acquston) Defne the rotaton axs To defne the rotaton axs, a bar phantom was measured wth a KINECT. Bar phantom RGB data Face Depth data Rotaton axs s fxed at the center of the bar phantom. Used area (80 300)
 x x = z tan θ h 320 y = z tan θ v 240 x 320 + 320 y 240 + 240 z c1 x x x = x cos θ z sn θ z = x sn θ")
7 6. Method (Convert depth data to 3D postons) Top vew y z x y y Rotaton axs c2 Surface data x, y, z 60 KINECT Surface data z c1 We convert the coordnate system x x 3D poston z c2 y y y (0,0,0) x x = z tan θ h 320 y = z tan θ v 240 x y z c1 x x x = x cos θ z sn θ z = x sn θ + z cos θ

8 7. Method (Voxelzaton of the surface data) z Data after converson X Y Z(depth) R G B plot the pont to the pxel array x count the number of dots s an acqured 3D poston # of dots z thresholdng and bnalzaton Slce mage x select surface voxels usng a threshold



9 8. Method (post processng) contour dlaton 6 tmes thnnng 2 tmes prunng 1 tme dlaton 3 tmes slce mage color mappng Mssng color of a processed slce mage s assumed to be a color of the nearest neghbor voxel. search path slce mage 3D surface mage after processng mssng color colored mage Stack contour mages vertcally Object space voxels 3D surface mage wth color mappng Stack colored contour mages vertcally


10 9. Expermental setups 380mm detector KINECT X-ray tube 15 KINECT QRmaster-P (Telesystems, Japan) mrror
11 10. Orbt of the X-ray tube and detector The rotaton center of a panoramc X-ray apparatus moves lnearly durng the data acquston. Scalng of acqured data s requred.


12 11. Acqured mage RGB mage Depth mage 59 frames / rotaton (12 sec.)
")



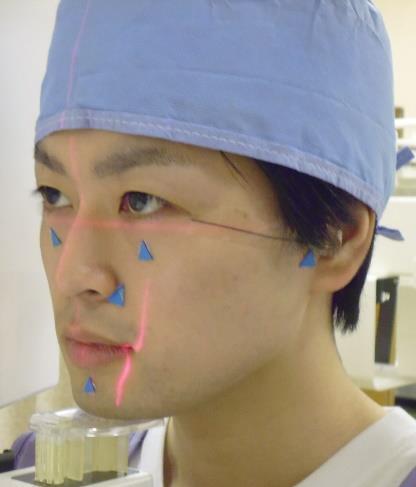
13 12. Experment (volunteer) Step1 marker 70 Panoramc X-ray data acquston Step2 tungsten rubber markers on the face Step3 Axs data acquston Face data acquston

14 13. Result (2.5D teeth and jaw bone mage) 2D panoramc mage 2.5D teeth and jaw bones mage A 2.5D teeth and jaw bone mage s reconstructed by fndng the focal pont of each area usng the tomosynthess method. Ths technques was presented by Telesystems, Japan.

 4locaton 1 5locaton 2 Raw data 2D")
15 14. How to make a panoramc mage Reconstructed curved planes 1locaton -2mm 2locaton -1 5 shft 3 1 3locaton 0 (central plane) 4locaton 1 5locaton 2 Raw data 2D panoramc mage
16 15. How to make a 2.5D mage 1 locaton -2mm 3locaton 0 (central plane) focused poston (x, y, z ) patch (x, y, z ) 5locaton D mage compare hgh frequency components
17 16. Regstraton (face mage and teeth mage) y y z face b 0 d 0 d 1 g p a 0 b 1 a1 x jaw bone : marker number(=1~5) a b ( x, y, z x, y, z ( x ) ) : maker poston on the face movng d 1 5 x, y, z c( x, y, z, ) g p 2 ( a ( x, y, z ) b ( x, y, z )) 5 5 arg mn c( x, y, x, ) x, y, z, : marker poston on the jaw bone 5 d 1 5 d ( d ) : gravty pont of jaw bone marker constrant condtons a y < b y a JB 2 z JB
")


18 17. Result (fused mage) 3D face mage 2.5D teeth and jaw bone mage fused mage
19 18. Concluson We made a dental fuson mage wth a KINECT and dental panoramc X-ray system. The qualty of the face mage was good, but the 2.5D teeth and bone mage was not enough. In the next stage, we wll mprove 2.5D jaw bone mages. References 1. K. Ogawa, R. P. Langlas, W. D. McDavd, et al. Development of a new dental panoramc radographc system based on a tomosynthess method, Dentomaxllofacal Radology (2010) 39, d_2645.html
An efficient method to build panoramic image mosaics
 An effcent method to buld panoramc mage mosacs Pattern Recognton Letters vol. 4 003 Dae-Hyun Km Yong-In Yoon Jong-Soo Cho School of Electrcal Engneerng and Computer Scence Kyungpook Natonal Unv. Abstract
An effcent method to buld panoramc mage mosacs Pattern Recognton Letters vol. 4 003 Dae-Hyun Km Yong-In Yoon Jong-Soo Cho School of Electrcal Engneerng and Computer Scence Kyungpook Natonal Unv. Abstract
3D vector computer graphics
 3D vector computer graphcs Paolo Varagnolo: freelance engneer Padova Aprl 2016 Prvate Practce ----------------------------------- 1. Introducton Vector 3D model representaton n computer graphcs requres
3D vector computer graphcs Paolo Varagnolo: freelance engneer Padova Aprl 2016 Prvate Practce ----------------------------------- 1. Introducton Vector 3D model representaton n computer graphcs requres
Shape Representation Robust to the Sketching Order Using Distance Map and Direction Histogram
 Shape Representaton Robust to the Sketchng Order Usng Dstance Map and Drecton Hstogram Department of Computer Scence Yonse Unversty Kwon Yun CONTENTS Revew Topc Proposed Method System Overvew Sketch Normalzaton
Shape Representaton Robust to the Sketchng Order Usng Dstance Map and Drecton Hstogram Department of Computer Scence Yonse Unversty Kwon Yun CONTENTS Revew Topc Proposed Method System Overvew Sketch Normalzaton
A Fast Visual Tracking Algorithm Based on Circle Pixels Matching
 A Fast Vsual Trackng Algorthm Based on Crcle Pxels Matchng Zhqang Hou hou_zhq@sohu.com Chongzhao Han czhan@mal.xjtu.edu.cn Ln Zheng Abstract: A fast vsual trackng algorthm based on crcle pxels matchng
A Fast Vsual Trackng Algorthm Based on Crcle Pxels Matchng Zhqang Hou hou_zhq@sohu.com Chongzhao Han czhan@mal.xjtu.edu.cn Ln Zheng Abstract: A fast vsual trackng algorthm based on crcle pxels matchng
Computer Generated Integral Imaging (II) System Using Depth-Camera
 System Using Depth-Camera") Computer Generated Integral Imagng (II) System Usng Depth-Camera Md. Sharful Islam 1, Md. Tarquzzaman 2 1,2 Department of Informaton and Communcaton Engneerng, Islamc Unversty, Kushta-7003, Bangladesh
Computer Generated Integral Imagng (II) System Usng Depth-Camera Md. Sharful Islam 1, Md. Tarquzzaman 2 1,2 Department of Informaton and Communcaton Engneerng, Islamc Unversty, Kushta-7003, Bangladesh
Improvement of Spatial Resolution Using BlockMatching Based Motion Estimation and Frame. Integration
 Improvement of Spatal Resoluton Usng BlockMatchng Based Moton Estmaton and Frame Integraton Danya Suga and Takayuk Hamamoto Graduate School of Engneerng, Tokyo Unversty of Scence, 6-3-1, Nuku, Katsuska-ku,
Improvement of Spatal Resoluton Usng BlockMatchng Based Moton Estmaton and Frame Integraton Danya Suga and Takayuk Hamamoto Graduate School of Engneerng, Tokyo Unversty of Scence, 6-3-1, Nuku, Katsuska-ku,
A high precision collaborative vision measurement of gear chamfering profile
 Internatonal Conference on Advances n Mechancal Engneerng and Industral Informatcs (AMEII 05) A hgh precson collaboratve vson measurement of gear chamferng profle Conglng Zhou, a, Zengpu Xu, b, Chunmng
Internatonal Conference on Advances n Mechancal Engneerng and Industral Informatcs (AMEII 05) A hgh precson collaboratve vson measurement of gear chamferng profle Conglng Zhou, a, Zengpu Xu, b, Chunmng
1. Answer the following. a. A beam of vertically polarized light of intensity W/m2 encounters two polarizing filters as shown below.
 1. Answer the followng. a. A beam of vertcally lght of ntensty 160.0 W/m2 encounters two polarzng flters as shown below. Vertcally ncdent tu-
1. Answer the followng. a. A beam of vertcally lght of ntensty 160.0 W/m2 encounters two polarzng flters as shown below. Vertcally ncdent tu-
Line-based Camera Movement Estimation by Using Parallel Lines in Omnidirectional Video
 01 IEEE Internatonal Conference on Robotcs and Automaton RverCentre, Sant Paul, Mnnesota, USA May 14-18, 01 Lne-based Camera Movement Estmaton by Usng Parallel Lnes n Omndrectonal Vdeo Ryosuke kawansh,
01 IEEE Internatonal Conference on Robotcs and Automaton RverCentre, Sant Paul, Mnnesota, USA May 14-18, 01 Lne-based Camera Movement Estmaton by Usng Parallel Lnes n Omndrectonal Vdeo Ryosuke kawansh,
An Image Fusion Approach Based on Segmentation Region
 Rong Wang, L-Qun Gao, Shu Yang, Yu-Hua Cha, and Yan-Chun Lu An Image Fuson Approach Based On Segmentaton Regon An Image Fuson Approach Based on Segmentaton Regon Rong Wang, L-Qun Gao, Shu Yang 3, Yu-Hua
Rong Wang, L-Qun Gao, Shu Yang, Yu-Hua Cha, and Yan-Chun Lu An Image Fuson Approach Based On Segmentaton Regon An Image Fuson Approach Based on Segmentaton Regon Rong Wang, L-Qun Gao, Shu Yang 3, Yu-Hua
ESTIMATION OF INTERIOR ORIENTATION AND ECCENTRICITY PARAMETERS OF A HYBRID IMAGING AND LASER SCANNING SENSOR
 ESTIMATION OF INTERIOR ORIENTATION AND ECCENTRICITY PARAMETERS OF A HYBRID IMAGING AND LASER SCANNING SENSOR A. Wendt a, C. Dold b a Insttute for Appled Photogrammetry and Geonformatcs, Unversty of Appled
ESTIMATION OF INTERIOR ORIENTATION AND ECCENTRICITY PARAMETERS OF A HYBRID IMAGING AND LASER SCANNING SENSOR A. Wendt a, C. Dold b a Insttute for Appled Photogrammetry and Geonformatcs, Unversty of Appled
Slide 1 SPH3UW: OPTICS I. Slide 2. Slide 3. Introduction to Mirrors. Light incident on an object
 Slde 1 SPH3UW: OPTICS I Introducton to Mrrors Slde 2 Lght ncdent on an object Absorpton Relecton (bounces)** See t Mrrors Reracton (bends) Lenses Oten some o each Everythng true or wavelengths
Slde 1 SPH3UW: OPTICS I Introducton to Mrrors Slde 2 Lght ncdent on an object Absorpton Relecton (bounces)** See t Mrrors Reracton (bends) Lenses Oten some o each Everythng true or wavelengths
TEST-05 TOPIC: OPTICS COMPLETE
 Q. A boy s walkng under an nclned mrror at a constant velocty V m/s along the x-axs as shown n fgure. If the mrror s nclned at an angle wth the horzontal then what s the velocty of the mage? Y V sn + V
Q. A boy s walkng under an nclned mrror at a constant velocty V m/s along the x-axs as shown n fgure. If the mrror s nclned at an angle wth the horzontal then what s the velocty of the mage? Y V sn + V
Structure from Motion
 Structure from Moton Structure from Moton For now, statc scene and movng camera Equvalentl, rgdl movng scene and statc camera Lmtng case of stereo wth man cameras Lmtng case of multvew camera calbraton
Structure from Moton Structure from Moton For now, statc scene and movng camera Equvalentl, rgdl movng scene and statc camera Lmtng case of stereo wth man cameras Lmtng case of multvew camera calbraton
A Binarization Algorithm specialized on Document Images and Photos
 A Bnarzaton Algorthm specalzed on Document mages and Photos Ergna Kavalleratou Dept. of nformaton and Communcaton Systems Engneerng Unversty of the Aegean kavalleratou@aegean.gr Abstract n ths paper, a
A Bnarzaton Algorthm specalzed on Document mages and Photos Ergna Kavalleratou Dept. of nformaton and Communcaton Systems Engneerng Unversty of the Aegean kavalleratou@aegean.gr Abstract n ths paper, a
ASPECTS ON THE COLD BPM S IN THE MAIN LINAC
 http://www.fnal.gov ASPECTS ON THE COLD BPM S IN THE MAIN LINAC 1. Resoluton 2. Resoluton 3. Resoluton 4.... Manfred Wendt, Fermlab manfred@fnal.gov 1/15 < > Contents INTRODUCTION BPM ASPECTS CANDIDATES
http://www.fnal.gov ASPECTS ON THE COLD BPM S IN THE MAIN LINAC 1. Resoluton 2. Resoluton 3. Resoluton 4.... Manfred Wendt, Fermlab manfred@fnal.gov 1/15 < > Contents INTRODUCTION BPM ASPECTS CANDIDATES
12/2/2009. Announcements. Parametric / Non-parametric. Case-Based Reasoning. Nearest-Neighbor on Images. Nearest-Neighbor Classification
 Introducton to Artfcal Intellgence V22.0472-001 Fall 2009 Lecture 24: Nearest-Neghbors & Support Vector Machnes Rob Fergus Dept of Computer Scence, Courant Insttute, NYU Sldes from Danel Yeung, John DeNero
Introducton to Artfcal Intellgence V22.0472-001 Fall 2009 Lecture 24: Nearest-Neghbors & Support Vector Machnes Rob Fergus Dept of Computer Scence, Courant Insttute, NYU Sldes from Danel Yeung, John DeNero
The Research of Ellipse Parameter Fitting Algorithm of Ultrasonic Imaging Logging in the Casing Hole
 Appled Mathematcs, 04, 5, 37-3 Publshed Onlne May 04 n ScRes. http://www.scrp.org/journal/am http://dx.do.org/0.436/am.04.584 The Research of Ellpse Parameter Fttng Algorthm of Ultrasonc Imagng Loggng
Appled Mathematcs, 04, 5, 37-3 Publshed Onlne May 04 n ScRes. http://www.scrp.org/journal/am http://dx.do.org/0.436/am.04.584 The Research of Ellpse Parameter Fttng Algorthm of Ultrasonc Imagng Loggng
PHYS 219 Spring semester Lecture 20: Reflection of Electromagnetic Radiation: Mirrors and Images Formed by Mirrors
 PHYS 219 Sprng semester 2014 Lecture 20: eflecton of Electromagnetc adaton: Mrrors and Images Formed by Mrrors on efenberger Brck Nanotechnology Center Purdue Unversty Lecture 20 1 evew: Snapshot of an
PHYS 219 Sprng semester 2014 Lecture 20: eflecton of Electromagnetc adaton: Mrrors and Images Formed by Mrrors on efenberger Brck Nanotechnology Center Purdue Unversty Lecture 20 1 evew: Snapshot of an
SLAM Summer School 2006 Practical 2: SLAM using Monocular Vision
 SLAM Summer School 2006 Practcal 2: SLAM usng Monocular Vson Javer Cvera, Unversty of Zaragoza Andrew J. Davson, Imperal College London J.M.M Montel, Unversty of Zaragoza. josemar@unzar.es, jcvera@unzar.es,
SLAM Summer School 2006 Practcal 2: SLAM usng Monocular Vson Javer Cvera, Unversty of Zaragoza Andrew J. Davson, Imperal College London J.M.M Montel, Unversty of Zaragoza. josemar@unzar.es, jcvera@unzar.es,
Accounting for the Use of Different Length Scale Factors in x, y and z Directions
 1 Accountng for the Use of Dfferent Length Scale Factors n x, y and z Drectons Taha Soch (taha.soch@kcl.ac.uk) Imagng Scences & Bomedcal Engneerng, Kng s College London, The Rayne Insttute, St Thomas Hosptal,
1 Accountng for the Use of Dfferent Length Scale Factors n x, y and z Drectons Taha Soch (taha.soch@kcl.ac.uk) Imagng Scences & Bomedcal Engneerng, Kng s College London, The Rayne Insttute, St Thomas Hosptal,
Calibrating a single camera. Odilon Redon, Cyclops, 1914
 Calbratng a sngle camera Odlon Redon, Cclops, 94 Our goal: Recover o 3D structure Recover o structure rom one mage s nherentl ambguous??? Sngle-vew ambgut Sngle-vew ambgut Rashad Alakbarov shadow sculptures
Calbratng a sngle camera Odlon Redon, Cclops, 94 Our goal: Recover o 3D structure Recover o structure rom one mage s nherentl ambguous??? Sngle-vew ambgut Sngle-vew ambgut Rashad Alakbarov shadow sculptures
Local Quaternary Patterns and Feature Local Quaternary Patterns
 Local Quaternary Patterns and Feature Local Quaternary Patterns Jayu Gu and Chengjun Lu The Department of Computer Scence, New Jersey Insttute of Technology, Newark, NJ 0102, USA Abstract - Ths paper presents
Local Quaternary Patterns and Feature Local Quaternary Patterns Jayu Gu and Chengjun Lu The Department of Computer Scence, New Jersey Insttute of Technology, Newark, NJ 0102, USA Abstract - Ths paper presents
Content Based Image Retrieval Using 2-D Discrete Wavelet with Texture Feature with Different Classifiers
 IOSR Journal of Electroncs and Communcaton Engneerng (IOSR-JECE) e-issn: 78-834,p- ISSN: 78-8735.Volume 9, Issue, Ver. IV (Mar - Apr. 04), PP 0-07 Content Based Image Retreval Usng -D Dscrete Wavelet wth
IOSR Journal of Electroncs and Communcaton Engneerng (IOSR-JECE) e-issn: 78-834,p- ISSN: 78-8735.Volume 9, Issue, Ver. IV (Mar - Apr. 04), PP 0-07 Content Based Image Retreval Usng -D Dscrete Wavelet wth
A Range Image Refinement Technique for Multi-view 3D Model Reconstruction
 A Range Image Refnement Technque for Mult-vew 3D Model Reconstructon Soon-Yong Park and Mural Subbarao Electrcal and Computer Engneerng State Unversty of New York at Stony Brook, USA E-mal: parksy@ece.sunysb.edu
A Range Image Refnement Technque for Mult-vew 3D Model Reconstructon Soon-Yong Park and Mural Subbarao Electrcal and Computer Engneerng State Unversty of New York at Stony Brook, USA E-mal: parksy@ece.sunysb.edu
Contours Planning and Visual Servo Control of XXY Positioning System Using NURBS Interpolation Approach
 Inventon Journal of Research Technology n Engneerng & Management (IJRTEM) ISSN: 2455-3689 www.jrtem.com olume 1 Issue 4 ǁ June. 2016 ǁ PP 16-23 Contours Plannng and sual Servo Control of XXY Postonng System
Inventon Journal of Research Technology n Engneerng & Management (IJRTEM) ISSN: 2455-3689 www.jrtem.com olume 1 Issue 4 ǁ June. 2016 ǁ PP 16-23 Contours Plannng and sual Servo Control of XXY Postonng System
Visual Inspection of Cylindrical Product s Lateral Surface using Cameras and Image Processing
 Vsual Inspecton of Cylndrcal Product s Lateral Surface usng Cameras and Image Processng Mohammed A.H. Al, M. Malah, H.H. Tang and S. Kaz Abstract Vsual nspecton usng cameras s used here for testng the
Vsual Inspecton of Cylndrcal Product s Lateral Surface usng Cameras and Image Processng Mohammed A.H. Al, M. Malah, H.H. Tang and S. Kaz Abstract Vsual nspecton usng cameras s used here for testng the
The motion simulation of three-dof parallel manipulator based on VBAI and MATLAB Zhuo Zhen, Chaoying Liu* and Xueling Song
 Internatonal Conference on Automaton, Mechancal Control and Computatonal Engneerng (AMCCE 25) he moton smulaton of three-dof parallel manpulator based on VBAI and MALAB Zhuo Zhen, Chaoyng Lu* and Xuelng
Internatonal Conference on Automaton, Mechancal Control and Computatonal Engneerng (AMCCE 25) he moton smulaton of three-dof parallel manpulator based on VBAI and MALAB Zhuo Zhen, Chaoyng Lu* and Xuelng
METRIC ALIGNMENT OF LASER RANGE SCANS AND CALIBRATED IMAGES USING LINEAR STRUCTURES
 METRIC ALIGNMENT OF LASER RANGE SCANS AND CALIBRATED IMAGES USING LINEAR STRUCTURES Lorenzo Sorg CIRA the Italan Aerospace Research Centre Computer Vson and Vrtual Realty Lab. Outlne Work goal Work motvaton
METRIC ALIGNMENT OF LASER RANGE SCANS AND CALIBRATED IMAGES USING LINEAR STRUCTURES Lorenzo Sorg CIRA the Italan Aerospace Research Centre Computer Vson and Vrtual Realty Lab. Outlne Work goal Work motvaton
Some Tutorial about the Project. Computer Graphics
 Some Tutoral about the Project Lecture 6 Rastersaton, Antalasng, Texture Mappng, I have already covered all the topcs needed to fnsh the 1 st practcal Today, I wll brefly explan how to start workng on
Some Tutoral about the Project Lecture 6 Rastersaton, Antalasng, Texture Mappng, I have already covered all the topcs needed to fnsh the 1 st practcal Today, I wll brefly explan how to start workng on
Differential wavefront curvature sensor
 Dfferental wavefront curvature sensor Weyao Zou and Jannck Rolland College of Optcs and Photoncs: CREOL& FPCE, Unversty of Central Florda Orlando, Florda 3816-700 ABSTRACT In ths paper, a wavefront curvature
Dfferental wavefront curvature sensor Weyao Zou and Jannck Rolland College of Optcs and Photoncs: CREOL& FPCE, Unversty of Central Florda Orlando, Florda 3816-700 ABSTRACT In ths paper, a wavefront curvature
EYE CENTER LOCALIZATION ON A FACIAL IMAGE BASED ON MULTI-BLOCK LOCAL BINARY PATTERNS
 P.G. Demdov Yaroslavl State Unversty Anatoly Ntn, Vladmr Khryashchev, Olga Stepanova, Igor Kostern EYE CENTER LOCALIZATION ON A FACIAL IMAGE BASED ON MULTI-BLOCK LOCAL BINARY PATTERNS Yaroslavl, 2015 Eye
P.G. Demdov Yaroslavl State Unversty Anatoly Ntn, Vladmr Khryashchev, Olga Stepanova, Igor Kostern EYE CENTER LOCALIZATION ON A FACIAL IMAGE BASED ON MULTI-BLOCK LOCAL BINARY PATTERNS Yaroslavl, 2015 Eye
R s s f. m y s. SPH3UW Unit 7.3 Spherical Concave Mirrors Page 1 of 12. Notes
 SPH3UW Unt 7.3 Sphercal Concave Mrrors Page 1 of 1 Notes Physcs Tool box Concave Mrror If the reflectng surface takes place on the nner surface of the sphercal shape so that the centre of the mrror bulges
SPH3UW Unt 7.3 Sphercal Concave Mrrors Page 1 of 1 Notes Physcs Tool box Concave Mrror If the reflectng surface takes place on the nner surface of the sphercal shape so that the centre of the mrror bulges
Shape-adaptive DCT and Its Application in Region-based Image Coding
 Internatonal Journal of Sgnal Processng, Image Processng and Pattern Recognton, pp.99-108 http://dx.do.org/10.14257/sp.2014.7.1.10 Shape-adaptve DCT and Its Applcaton n Regon-based Image Codng Yamn Zheng,
Internatonal Journal of Sgnal Processng, Image Processng and Pattern Recognton, pp.99-108 http://dx.do.org/10.14257/sp.2014.7.1.10 Shape-adaptve DCT and Its Applcaton n Regon-based Image Codng Yamn Zheng,
Quick error verification of portable coordinate measuring arm
 Quck error verfcaton of portable coordnate measurng arm J.F. Ouang, W.L. Lu, X.H. Qu State Ke Laborator of Precson Measurng Technolog and Instruments, Tanjn Unverst, Tanjn 7, Chna Tel.: + 86 [] 7-8-99
Quck error verfcaton of portable coordnate measurng arm J.F. Ouang, W.L. Lu, X.H. Qu State Ke Laborator of Precson Measurng Technolog and Instruments, Tanjn Unverst, Tanjn 7, Chna Tel.: + 86 [] 7-8-99
A Gradient Difference based Technique for Video Text Detection
 A Gradent Dfference based Technque for Vdeo Text Detecton Palaahnakote Shvakumara, Trung Quy Phan and Chew Lm Tan School of Computng, Natonal Unversty of Sngapore {shva, phanquyt, tancl }@comp.nus.edu.sg
A Gradent Dfference based Technque for Vdeo Text Detecton Palaahnakote Shvakumara, Trung Quy Phan and Chew Lm Tan School of Computng, Natonal Unversty of Sngapore {shva, phanquyt, tancl }@comp.nus.edu.sg
Accelerating X-Ray data collection using Pyramid Beam ray casting geometries
 Acceleratng X-Ray data collecton usng Pyramd Beam ray castng geometres Amr Averbuch Guy Lfchtz Y. Shkolnsky 3 School of Computer Scence Department of Appled Mathematcs, School of Mathematcal Scences Tel
Acceleratng X-Ray data collecton usng Pyramd Beam ray castng geometres Amr Averbuch Guy Lfchtz Y. Shkolnsky 3 School of Computer Scence Department of Appled Mathematcs, School of Mathematcal Scences Tel
A Gradient Difference based Technique for Video Text Detection
 2009 10th Internatonal Conference on Document Analyss and Recognton A Gradent Dfference based Technque for Vdeo Text Detecton Palaahnakote Shvakumara, Trung Quy Phan and Chew Lm Tan School of Computng,
2009 10th Internatonal Conference on Document Analyss and Recognton A Gradent Dfference based Technque for Vdeo Text Detecton Palaahnakote Shvakumara, Trung Quy Phan and Chew Lm Tan School of Computng,
REFRACTION. a. To study the refraction of light from plane surfaces. b. To determine the index of refraction for Acrylic and Water.
 Purpose Theory REFRACTION a. To study the refracton of lght from plane surfaces. b. To determne the ndex of refracton for Acrylc and Water. When a ray of lght passes from one medum nto another one of dfferent
Purpose Theory REFRACTION a. To study the refracton of lght from plane surfaces. b. To determne the ndex of refracton for Acrylc and Water. When a ray of lght passes from one medum nto another one of dfferent
TN348: Openlab Module - Colocalization
 TN348: Openlab Module - Colocalzaton Topc The Colocalzaton module provdes the faclty to vsualze and quantfy colocalzaton between pars of mages. The Colocalzaton wndow contans a prevew of the two mages
TN348: Openlab Module - Colocalzaton Topc The Colocalzaton module provdes the faclty to vsualze and quantfy colocalzaton between pars of mages. The Colocalzaton wndow contans a prevew of the two mages
Learning the Kernel Parameters in Kernel Minimum Distance Classifier
 Learnng the Kernel Parameters n Kernel Mnmum Dstance Classfer Daoqang Zhang 1,, Songcan Chen and Zh-Hua Zhou 1* 1 Natonal Laboratory for Novel Software Technology Nanjng Unversty, Nanjng 193, Chna Department
Learnng the Kernel Parameters n Kernel Mnmum Dstance Classfer Daoqang Zhang 1,, Songcan Chen and Zh-Hua Zhou 1* 1 Natonal Laboratory for Novel Software Technology Nanjng Unversty, Nanjng 193, Chna Department
2D Raster Graphics. Integer grid Sequential (left-right, top-down) scan. Computer Graphics
 scan. Computer Graphics") 2D Graphcs 2D Raster Graphcs Integer grd Sequental (left-rght, top-down scan j Lne drawng A ver mportant operaton used frequentl, block dagrams, bar charts, engneerng drawng, archtecture plans, etc. curves
2D Graphcs 2D Raster Graphcs Integer grd Sequental (left-rght, top-down scan j Lne drawng A ver mportant operaton used frequentl, block dagrams, bar charts, engneerng drawng, archtecture plans, etc. curves
Distance Calculation from Single Optical Image
 17 Internatonal Conference on Mathematcs, Modellng and Smulaton Technologes and Applcatons (MMSTA 17) ISBN: 978-1-6595-53-8 Dstance Calculaton from Sngle Optcal Image Xao-yng DUAN 1,, Yang-je WEI 1,,*
17 Internatonal Conference on Mathematcs, Modellng and Smulaton Technologes and Applcatons (MMSTA 17) ISBN: 978-1-6595-53-8 Dstance Calculaton from Sngle Optcal Image Xao-yng DUAN 1,, Yang-je WEI 1,,*
An Image Compression Algorithm based on Wavelet Transform and LZW
 An Image Compresson Algorthm based on Wavelet Transform and LZW Png Luo a, Janyong Yu b School of Chongqng Unversty of Posts and Telecommuncatons, Chongqng, 400065, Chna Abstract a cylpng@63.com, b y27769864@sna.cn
An Image Compresson Algorthm based on Wavelet Transform and LZW Png Luo a, Janyong Yu b School of Chongqng Unversty of Posts and Telecommuncatons, Chongqng, 400065, Chna Abstract a cylpng@63.com, b y27769864@sna.cn
Outline. Seamless Image Stitching in the Gradient Domain. Related Approaches. Image Stitching. Introduction Related Work
 Outlne Seamless Image Sttchng n the Gradent Doman Anat Levn, Assaf Zomet, Shmuel Peleg and Yar Wess ECCV 004 Presenter: Pn Wu Oct 007 Introducton Related Work GIST: Gradent-doman Image Sttchng GIST GIST
Outlne Seamless Image Sttchng n the Gradent Doman Anat Levn, Assaf Zomet, Shmuel Peleg and Yar Wess ECCV 004 Presenter: Pn Wu Oct 007 Introducton Related Work GIST: Gradent-doman Image Sttchng GIST GIST
A NEW APPROACH FOR SUBWAY TUNNEL DEFORMATION MONITORING: HIGH-RESOLUTION TERRESTRIAL LASER SCANNING
 A NEW APPROACH FOR SUBWAY TUNNEL DEFORMATION MONITORING: HIGH-RESOLUTION TERRESTRIAL LASER SCANNING L Jan a, Wan Youchuan a,, Gao Xanjun a a School of Remote Sensng and Informaton Engneerng, Wuhan Unversty,129
A NEW APPROACH FOR SUBWAY TUNNEL DEFORMATION MONITORING: HIGH-RESOLUTION TERRESTRIAL LASER SCANNING L Jan a, Wan Youchuan a,, Gao Xanjun a a School of Remote Sensng and Informaton Engneerng, Wuhan Unversty,129
Scan Conversion & Shading
 Scan Converson & Shadng Thomas Funkhouser Prnceton Unversty C0S 426, Fall 1999 3D Renderng Ppelne (for drect llumnaton) 3D Prmtves 3D Modelng Coordnates Modelng Transformaton 3D World Coordnates Lghtng
Scan Converson & Shadng Thomas Funkhouser Prnceton Unversty C0S 426, Fall 1999 3D Renderng Ppelne (for drect llumnaton) 3D Prmtves 3D Modelng Coordnates Modelng Transformaton 3D World Coordnates Lghtng
Scan Conversion & Shading
 1 3D Renderng Ppelne (for drect llumnaton) 2 Scan Converson & Shadng Adam Fnkelsten Prnceton Unversty C0S 426, Fall 2001 3DPrmtves 3D Modelng Coordnates Modelng Transformaton 3D World Coordnates Lghtng
1 3D Renderng Ppelne (for drect llumnaton) 2 Scan Converson & Shadng Adam Fnkelsten Prnceton Unversty C0S 426, Fall 2001 3DPrmtves 3D Modelng Coordnates Modelng Transformaton 3D World Coordnates Lghtng
Panorama Mosaic Optimization for Mobile Camera Systems
 S. J. Ha et al.: Panorama Mosac Optmzaton for Moble Camera Systems Panorama Mosac Optmzaton for Moble Camera Systems Seong Jong Ha, Hyung Il Koo, Sang Hwa Lee, Nam Ik Cho, Soo Kyun Km, Member, IEEE 27
S. J. Ha et al.: Panorama Mosac Optmzaton for Moble Camera Systems Panorama Mosac Optmzaton for Moble Camera Systems Seong Jong Ha, Hyung Il Koo, Sang Hwa Lee, Nam Ik Cho, Soo Kyun Km, Member, IEEE 27
PHOTOGRAMMETRIC ANALYSIS OF ASYNCHRONOUSLY ACQUIRED IMAGE SEQUENCES
 PHOTOGRAMMETRIC ANALYSIS OF ASYNCHRONOUSLY ACQUIRED IMAGE SEQUENCES Karsten Raguse 1, Chrstan Hepke 2 1 Volkswagen AG, Research & Development, Dept. EZTV, Letter Box 1788, 38436 Wolfsburg, Germany Emal:
PHOTOGRAMMETRIC ANALYSIS OF ASYNCHRONOUSLY ACQUIRED IMAGE SEQUENCES Karsten Raguse 1, Chrstan Hepke 2 1 Volkswagen AG, Research & Development, Dept. EZTV, Letter Box 1788, 38436 Wolfsburg, Germany Emal:
Human Skeleton Reconstruction for Optical Motion Capture
 Journal of Computatonal Informaton Systems 9: 0 (013) 8073 8080 Avalable at http://www.jofcs.com Human Skeleton Reconstructon for Optcal Moton Capture Guanghua TAN, Melan ZHOU, Chunmng GAO College of Informaton
Journal of Computatonal Informaton Systems 9: 0 (013) 8073 8080 Avalable at http://www.jofcs.com Human Skeleton Reconstructon for Optcal Moton Capture Guanghua TAN, Melan ZHOU, Chunmng GAO College of Informaton
Virtual Machine Migration based on Trust Measurement of Computer Node
 Appled Mechancs and Materals Onlne: 2014-04-04 ISSN: 1662-7482, Vols. 536-537, pp 678-682 do:10.4028/www.scentfc.net/amm.536-537.678 2014 Trans Tech Publcatons, Swtzerland Vrtual Machne Mgraton based on
Appled Mechancs and Materals Onlne: 2014-04-04 ISSN: 1662-7482, Vols. 536-537, pp 678-682 do:10.4028/www.scentfc.net/amm.536-537.678 2014 Trans Tech Publcatons, Swtzerland Vrtual Machne Mgraton based on
Barycentric Coordinates. From: Mean Value Coordinates for Closed Triangular Meshes by Ju et al.
 Barycentrc Coordnates From: Mean Value Coordnates for Closed Trangular Meshes by Ju et al. Motvaton Data nterpolaton from the vertces of a boundary polygon to ts nteror Boundary value problems Shadng Space
Barycentrc Coordnates From: Mean Value Coordnates for Closed Trangular Meshes by Ju et al. Motvaton Data nterpolaton from the vertces of a boundary polygon to ts nteror Boundary value problems Shadng Space
AP PHYSICS B 2008 SCORING GUIDELINES
 AP PHYSICS B 2008 SCORING GUIDELINES General Notes About 2008 AP Physcs Scorng Gudelnes 1. The solutons contan the most common method of solvng the free-response questons and the allocaton of ponts for
AP PHYSICS B 2008 SCORING GUIDELINES General Notes About 2008 AP Physcs Scorng Gudelnes 1. The solutons contan the most common method of solvng the free-response questons and the allocaton of ponts for
The Codesign Challenge
 ECE 4530 Codesgn Challenge Fall 2007 Hardware/Software Codesgn The Codesgn Challenge Objectves In the codesgn challenge, your task s to accelerate a gven software reference mplementaton as fast as possble.
ECE 4530 Codesgn Challenge Fall 2007 Hardware/Software Codesgn The Codesgn Challenge Objectves In the codesgn challenge, your task s to accelerate a gven software reference mplementaton as fast as possble.
Conditional Speculative Decimal Addition*
 Condtonal Speculatve Decmal Addton Alvaro Vazquez and Elsardo Antelo Dep. of Electronc and Computer Engneerng Unv. of Santago de Compostela, Span Ths work was supported n part by Xunta de Galca under grant
Condtonal Speculatve Decmal Addton Alvaro Vazquez and Elsardo Antelo Dep. of Electronc and Computer Engneerng Unv. of Santago de Compostela, Span Ths work was supported n part by Xunta de Galca under grant
LEAST SQUARES. RANSAC. HOUGH TRANSFORM.
 LEAS SQUARES. RANSAC. HOUGH RANSFORM. he sldes are from several sources through James Has (Brown); Srnvasa Narasmhan (CMU); Slvo Savarese (U. of Mchgan); Bll Freeman and Antono orralba (MI), ncludng ther
LEAS SQUARES. RANSAC. HOUGH RANSFORM. he sldes are from several sources through James Has (Brown); Srnvasa Narasmhan (CMU); Slvo Savarese (U. of Mchgan); Bll Freeman and Antono orralba (MI), ncludng ther
Color in OpenGL Polygonal Shading Light Source in OpenGL Material Properties Normal Vectors Phong model
 Color n OpenGL Polygonal Shadng Lght Source n OpenGL Materal Propertes Normal Vectors Phong model 2 We know how to rasterze - Gven a 3D trangle and a 3D vewpont, we know whch pxels represent the trangle
Color n OpenGL Polygonal Shadng Lght Source n OpenGL Materal Propertes Normal Vectors Phong model 2 We know how to rasterze - Gven a 3D trangle and a 3D vewpont, we know whch pxels represent the trangle
Mobile Robot Localization and Mapping by Scan Matching using Laser Reflection Intensity of the SOKUIKI Sensor
 Moble Robot Localzaton and Mappng by Scan Matchng usng Reflecton Intensty of the SOKUIKI Sensor *HARA Yoshtaka, KAWATA Hrohko, OHYA Akhsa, YUTA Shn ch Intellgent Robot Laboratory Unversty of Tsukuba 1-1-1,
Moble Robot Localzaton and Mappng by Scan Matchng usng Reflecton Intensty of the SOKUIKI Sensor *HARA Yoshtaka, KAWATA Hrohko, OHYA Akhsa, YUTA Shn ch Intellgent Robot Laboratory Unversty of Tsukuba 1-1-1,
Real-time Motion Capture System Using One Video Camera Based on Color and Edge Distribution
 Real-tme Moton Capture System Usng One Vdeo Camera Based on Color and Edge Dstrbuton YOSHIAKI AKAZAWA, YOSHIHIRO OKADA, AND KOICHI NIIJIMA Graduate School of Informaton Scence and Electrcal Engneerng,
Real-tme Moton Capture System Usng One Vdeo Camera Based on Color and Edge Dstrbuton YOSHIAKI AKAZAWA, YOSHIHIRO OKADA, AND KOICHI NIIJIMA Graduate School of Informaton Scence and Electrcal Engneerng,
Projector-Camera Based System for Fast Object Modeling
 Projector-Camera Based System for Fast Object Modelng Guanghu Wang a,b, Zhany Hu a, Fuchao Wu a, Hung-at su b a. Natonal Laboratory of Pattern Recognton, Insttute of Automaton Chnese Academy of Scences,
Projector-Camera Based System for Fast Object Modelng Guanghu Wang a,b, Zhany Hu a, Fuchao Wu a, Hung-at su b a. Natonal Laboratory of Pattern Recognton, Insttute of Automaton Chnese Academy of Scences,
Real-time Joint Tracking of a Hand Manipulating an Object from RGB-D Input
 Real-tme Jont Tracng of a Hand Manpulatng an Object from RGB-D Input Srnath Srdhar 1 Franzsa Mueller 1 Mchael Zollhöfer 1 Dan Casas 1 Antt Oulasvrta 2 Chrstan Theobalt 1 1 Max Planc Insttute for Informatcs
Real-tme Jont Tracng of a Hand Manpulatng an Object from RGB-D Input Srnath Srdhar 1 Franzsa Mueller 1 Mchael Zollhöfer 1 Dan Casas 1 Antt Oulasvrta 2 Chrstan Theobalt 1 1 Max Planc Insttute for Informatcs
Tsinghua University at TAC 2009: Summarizing Multi-documents by Information Distance
 Tsnghua Unversty at TAC 2009: Summarzng Mult-documents by Informaton Dstance Chong Long, Mnle Huang, Xaoyan Zhu State Key Laboratory of Intellgent Technology and Systems, Tsnghua Natonal Laboratory for
Tsnghua Unversty at TAC 2009: Summarzng Mult-documents by Informaton Dstance Chong Long, Mnle Huang, Xaoyan Zhu State Key Laboratory of Intellgent Technology and Systems, Tsnghua Natonal Laboratory for
Image-based Localization in Urban Environments
 Image-based Localzaton n Urban Envronments by Phlp Davd ARL-MR-0738 March 2010 Approved for publc release; dstrbuton unlmted. NOTICES Dsclamers The fndngs n ths report are not to be construed as an offcal
Image-based Localzaton n Urban Envronments by Phlp Davd ARL-MR-0738 March 2010 Approved for publc release; dstrbuton unlmted. NOTICES Dsclamers The fndngs n ths report are not to be construed as an offcal
Introduction to Geometrical Optics - a 2D ray tracing Excel model for spherical mirrors - Part 2
 Introducton to Geometrcal Optcs - a D ra tracng Ecel model for sphercal mrrors - Part b George ungu - Ths s a tutoral eplanng the creaton of an eact D ra tracng model for both sphercal concave and sphercal
Introducton to Geometrcal Optcs - a D ra tracng Ecel model for sphercal mrrors - Part b George ungu - Ths s a tutoral eplanng the creaton of an eact D ra tracng model for both sphercal concave and sphercal
Focusing and leveling system for optical lithography using linear CCD
 Focusng and levelng system for optcal lthography usng lnear CCD Tao HUANG a, Shyuan LIU *, a, Pengxng YI a, Teln SHI b a State Key Laboratory of Dgtal Manufacturng Equpment and Technology, Huazhong Unversty
Focusng and levelng system for optcal lthography usng lnear CCD Tao HUANG a, Shyuan LIU *, a, Pengxng YI a, Teln SHI b a State Key Laboratory of Dgtal Manufacturng Equpment and Technology, Huazhong Unversty
Environmental Mapping by Trinocular Vision for Self-Localization Using Monocular Vision
 OS3-3 Envronmental Mappng by rnocular Vson for Self-Localzaton Usng Monocular Vson Yoo OGAWA, Nobutaa SHIMADA, Yosha SHIRAI Rtsumean Unversty, 1-1-1 No-hgash, Kusatu, Shga, Japan he hrd Jont Worshop on
OS3-3 Envronmental Mappng by rnocular Vson for Self-Localzaton Usng Monocular Vson Yoo OGAWA, Nobutaa SHIMADA, Yosha SHIRAI Rtsumean Unversty, 1-1-1 No-hgash, Kusatu, Shga, Japan he hrd Jont Worshop on
Range images. Range image registration. Examples of sampling patterns. Range images and range surfaces
 Range mages For many structured lght scanners, the range data forms a hghly regular pattern known as a range mage. he samplng pattern s determned by the specfc scanner. Range mage regstraton 1 Examples
Range mages For many structured lght scanners, the range data forms a hghly regular pattern known as a range mage. he samplng pattern s determned by the specfc scanner. Range mage regstraton 1 Examples
A Novel Accurate Algorithm to Ellipse Fitting for Iris Boundary Using Most Iris Edges. Mohammad Reza Mohammadi 1, Abolghasem Raie 2
 A Novel Accurate Algorthm to Ellpse Fttng for Irs Boundar Usng Most Irs Edges Mohammad Reza Mohammad 1, Abolghasem Rae 2 1. Department of Electrcal Engneerng, Amrabr Unverst of Technolog, Iran. mrmohammad@aut.ac.r
A Novel Accurate Algorthm to Ellpse Fttng for Irs Boundar Usng Most Irs Edges Mohammad Reza Mohammad 1, Abolghasem Rae 2 1. Department of Electrcal Engneerng, Amrabr Unverst of Technolog, Iran. mrmohammad@aut.ac.r
Object Tracking Based on PISC Image and Template Matching
 ect Trackng Based on PISC Image and Template Matchng Bud Sugand Electrcal Engneerng Department Batam State Polytechnc Batam Indonesa ud_sugand@polatam.ac.d Astract Ths paper proposed a method for oect
ect Trackng Based on PISC Image and Template Matchng Bud Sugand Electrcal Engneerng Department Batam State Polytechnc Batam Indonesa ud_sugand@polatam.ac.d Astract Ths paper proposed a method for oect
Suppression for Luminance Difference of Stereo Image-Pair Based on Improved Histogram Equalization
 Suppresson for Lumnance Dfference of Stereo Image-Par Based on Improved Hstogram Equalzaton Zhao Llng,, Zheng Yuhu 3, Sun Quansen, Xa Deshen School of Computer Scence and Technology, NJUST, Nanjng, Chna.School
Suppresson for Lumnance Dfference of Stereo Image-Par Based on Improved Hstogram Equalzaton Zhao Llng,, Zheng Yuhu 3, Sun Quansen, Xa Deshen School of Computer Scence and Technology, NJUST, Nanjng, Chna.School
Calibration Method for 2-Dimensional Laser Scanner Attached on a Robot Vehicle
 Proceedngs of the 17th World Congress The Internatonal Federaton of Automatc Control Seoul, Korea, July 6-11, 8 Calbraton Method for -Dmensonal Laser Scanner Attached on a Robot Vehcle Oscar C. Barawd,
Proceedngs of the 17th World Congress The Internatonal Federaton of Automatc Control Seoul, Korea, July 6-11, 8 Calbraton Method for -Dmensonal Laser Scanner Attached on a Robot Vehcle Oscar C. Barawd,
High resolution 3D Tau-p transform by matching pursuit Weiping Cao* and Warren S. Ross, Shearwater GeoServices
 Hgh resoluton 3D Tau-p transform by matchng pursut Wepng Cao* and Warren S. Ross, Shearwater GeoServces Summary The 3D Tau-p transform s of vtal sgnfcance for processng sesmc data acqured wth modern wde
Hgh resoluton 3D Tau-p transform by matchng pursut Wepng Cao* and Warren S. Ross, Shearwater GeoServces Summary The 3D Tau-p transform s of vtal sgnfcance for processng sesmc data acqured wth modern wde
Robust Classification of ph Levels on a Camera Phone
 Robust Classfcaton of ph Levels on a Camera Phone B.Y. Loh, N.K. Vuong, S. Chan and C.. Lau AbstractIn ths paper, we present a new algorthm that automatcally classfes the ph level on a test strp usng color
Robust Classfcaton of ph Levels on a Camera Phone B.Y. Loh, N.K. Vuong, S. Chan and C.. Lau AbstractIn ths paper, we present a new algorthm that automatcally classfes the ph level on a test strp usng color
Edge Detection in Noisy Images Using the Support Vector Machines
 Edge Detecton n Nosy Images Usng the Support Vector Machnes Hlaro Gómez-Moreno, Saturnno Maldonado-Bascón, Francsco López-Ferreras Sgnal Theory and Communcatons Department. Unversty of Alcalá Crta. Madrd-Barcelona
Edge Detecton n Nosy Images Usng the Support Vector Machnes Hlaro Gómez-Moreno, Saturnno Maldonado-Bascón, Francsco López-Ferreras Sgnal Theory and Communcatons Department. Unversty of Alcalá Crta. Madrd-Barcelona
MOTION PANORAMA CONSTRUCTION FROM STREAMING VIDEO FOR POWER- CONSTRAINED MOBILE MULTIMEDIA ENVIRONMENTS XUNYU PAN
 MOTION PANORAMA CONSTRUCTION FROM STREAMING VIDEO FOR POWER- CONSTRAINED MOBILE MULTIMEDIA ENVIRONMENTS by XUNYU PAN (Under the Drecton of Suchendra M. Bhandarkar) ABSTRACT In modern tmes, more and more
MOTION PANORAMA CONSTRUCTION FROM STREAMING VIDEO FOR POWER- CONSTRAINED MOBILE MULTIMEDIA ENVIRONMENTS by XUNYU PAN (Under the Drecton of Suchendra M. Bhandarkar) ABSTRACT In modern tmes, more and more
Lecture 5: Multilayer Perceptrons
 Lecture 5: Multlayer Perceptrons Roger Grosse 1 Introducton So far, we ve only talked about lnear models: lnear regresson and lnear bnary classfers. We noted that there are functons that can t be represented
Lecture 5: Multlayer Perceptrons Roger Grosse 1 Introducton So far, we ve only talked about lnear models: lnear regresson and lnear bnary classfers. We noted that there are functons that can t be represented
Acoustic Camera Image Mosaicing and Super-resolution
 Acoustc Camera Image Mosacng and Super-resoluton K. Km Insttute for Bran and Neural Systems Brown Unv. Box 1843 Provdence RI 091, USA ko@brown.edu N. Nerett Insttute for Bran and Neural Systems Brown Unv.
Acoustc Camera Image Mosacng and Super-resoluton K. Km Insttute for Bran and Neural Systems Brown Unv. Box 1843 Provdence RI 091, USA ko@brown.edu N. Nerett Insttute for Bran and Neural Systems Brown Unv.
RIGOROUS GENERATION OF DIGITAL ORTHOPHOTOS FROM EROS A HIGH RESOLUTION SATELLITE IMAGES
 ISPRS SIPT IGU UCI CIG ACSG Table of contents Table des matères Authors ndex Index des auteurs Search Recherches Ext Sortr RIGOROUS GENERATION OF DIGITAL ORTHOPHOTOS FROM EROS A HIGH RESOLUTION SATELLITE
ISPRS SIPT IGU UCI CIG ACSG Table of contents Table des matères Authors ndex Index des auteurs Search Recherches Ext Sortr RIGOROUS GENERATION OF DIGITAL ORTHOPHOTOS FROM EROS A HIGH RESOLUTION SATELLITE
An Adaptive Complementary Filter For Gyroscope/Vision Integrated Attitude Estimation
 Paper Int l J. of Aeronautcal & Space Sc. 17(), 1 1 (16) DOI: http://dx.do.org/1.5139/ijass.16.17..1 An Adaptve Complementary Flter For Gyroscope/Vson Integrated Atttude Estmaton Chan Gook Park* Department
Paper Int l J. of Aeronautcal & Space Sc. 17(), 1 1 (16) DOI: http://dx.do.org/1.5139/ijass.16.17..1 An Adaptve Complementary Flter For Gyroscope/Vson Integrated Atttude Estmaton Chan Gook Park* Department
Face Recognition University at Buffalo CSE666 Lecture Slides Resources:
 Face Recognton Unversty at Buffalo CSE666 Lecture Sldes Resources: http://www.face-rec.org/algorthms/ Overvew of face recognton algorthms Correlaton - Pxel based correspondence between two face mages Structural
Face Recognton Unversty at Buffalo CSE666 Lecture Sldes Resources: http://www.face-rec.org/algorthms/ Overvew of face recognton algorthms Correlaton - Pxel based correspondence between two face mages Structural
Fingerprint matching based on weighting method and SVM
 Fngerprnt matchng based on weghtng method and SVM Ja Ja, Lanhong Ca, Pnyan Lu, Xuhu Lu Key Laboratory of Pervasve Computng (Tsnghua Unversty), Mnstry of Educaton Bejng 100084, P.R.Chna {jaja}@mals.tsnghua.edu.cn
Fngerprnt matchng based on weghtng method and SVM Ja Ja, Lanhong Ca, Pnyan Lu, Xuhu Lu Key Laboratory of Pervasve Computng (Tsnghua Unversty), Mnstry of Educaton Bejng 100084, P.R.Chna {jaja}@mals.tsnghua.edu.cn
A Model-Based Iterative Algorithm for Dual-Energy X-Ray CT Reconstruction
 A Model-Based Iteratve Algorthm for Dual-Energy X-Ray CT Reconstructon Ruoqao Zhang, Jean-Baptste Thbault, Member, IEEE, Charles A. Bouman, Fellow, IEEE, Ken D. Sauer, Member, IEEE, and Jang Hseh, Senor
A Model-Based Iteratve Algorthm for Dual-Energy X-Ray CT Reconstructon Ruoqao Zhang, Jean-Baptste Thbault, Member, IEEE, Charles A. Bouman, Fellow, IEEE, Ken D. Sauer, Member, IEEE, and Jang Hseh, Senor
Computer Animation and Visualisation. Lecture 4. Rigging / Skinning
 Computer Anmaton and Vsualsaton Lecture 4. Rggng / Sknnng Taku Komura Overvew Sknnng / Rggng Background knowledge Lnear Blendng How to decde weghts? Example-based Method Anatomcal models Sknnng Assume
Computer Anmaton and Vsualsaton Lecture 4. Rggng / Sknnng Taku Komura Overvew Sknnng / Rggng Background knowledge Lnear Blendng How to decde weghts? Example-based Method Anatomcal models Sknnng Assume
Fuzzy Automatic Detection of Landmines from Sensors Data
 Fuzzy Automatc Detecton of Landmnes from Sensors Data ZAKARYA ZYADA* AND TOSHIO FUKUDA** * Faculty of Mechancal Engneerng, Unverst Teknolog Malaysa, 81310 Johor, MALAYSIA; ( On leave Department of Mechancal
Fuzzy Automatc Detecton of Landmnes from Sensors Data ZAKARYA ZYADA* AND TOSHIO FUKUDA** * Faculty of Mechancal Engneerng, Unverst Teknolog Malaysa, 81310 Johor, MALAYSIA; ( On leave Department of Mechancal
Image-based Motion Stabilization for Maritime Surveillance
 Image-based Moton Stablzaton for Martme Survellance Danel D. Morrs, Bran R. Colonna and Franln D. Snyder General Dynamcs Robotc Systems, 151 Ardmore Blvd, Pttsburgh, PA 15221 * ABSTRACT Robust mage-based
Image-based Moton Stablzaton for Martme Survellance Danel D. Morrs, Bran R. Colonna and Franln D. Snyder General Dynamcs Robotc Systems, 151 Ardmore Blvd, Pttsburgh, PA 15221 * ABSTRACT Robust mage-based
SMART PHOTO PRINTER USER'S GUIDE. Version V MODEL SmartD90-EV
 SMART PHOTO PRINTER MODEL SmartD90-EV USER'S GUIDE Verson V1.5.2.0 1 TABLE OF CONTENTS Introducton Introducton 3 Bascs 4 Constructon of compostons 5 Operaton Easy Prnt Servce 8 Fun Prnt Servce 10 Sharng
SMART PHOTO PRINTER MODEL SmartD90-EV USER'S GUIDE Verson V1.5.2.0 1 TABLE OF CONTENTS Introducton Introducton 3 Bascs 4 Constructon of compostons 5 Operaton Easy Prnt Servce 8 Fun Prnt Servce 10 Sharng
A proposal for the motion analysis method of skiing turn by measurement of orientation and gliding trajectory
 Avalable onlne at www.scencedrect.com Proceda Engneerng 13 (211) 17 22 5 th Asa-Pacfc Congress on Sports Technology (APCST) A proposal for the moton analyss method of skng turn by measurement of orentaton
Avalable onlne at www.scencedrect.com Proceda Engneerng 13 (211) 17 22 5 th Asa-Pacfc Congress on Sports Technology (APCST) A proposal for the moton analyss method of skng turn by measurement of orentaton
Calibration of an Articulated Camera System
 Calbraton of an Artculated Camera System CHEN Junzhou and Kn Hong WONG Department of Computer Scence and Engneerng The Chnese Unversty of Hong Kong {jzchen, khwong}@cse.cuhk.edu.hk Abstract Multple Camera
Calbraton of an Artculated Camera System CHEN Junzhou and Kn Hong WONG Department of Computer Scence and Engneerng The Chnese Unversty of Hong Kong {jzchen, khwong}@cse.cuhk.edu.hk Abstract Multple Camera
Dynamic wetting property investigation of AFM tips in micro/nanoscale
 Dynamc wettng property nvestgaton of AFM tps n mcro/nanoscale The wettng propertes of AFM probe tps are of concern n AFM tp related force measurement, fabrcaton, and manpulaton technques, such as dp-pen
Dynamc wettng property nvestgaton of AFM tps n mcro/nanoscale The wettng propertes of AFM probe tps are of concern n AFM tp related force measurement, fabrcaton, and manpulaton technques, such as dp-pen
Corner-Based Image Alignment using Pyramid Structure with Gradient Vector Similarity
 Journal of Sgnal and Informaton Processng, 013, 4, 114-119 do:10.436/jsp.013.43b00 Publshed Onlne August 013 (http://www.scrp.org/journal/jsp) Corner-Based Image Algnment usng Pyramd Structure wth Gradent
Journal of Sgnal and Informaton Processng, 013, 4, 114-119 do:10.436/jsp.013.43b00 Publshed Onlne August 013 (http://www.scrp.org/journal/jsp) Corner-Based Image Algnment usng Pyramd Structure wth Gradent
Parallelism for Nested Loops with Non-uniform and Flow Dependences
 Parallelsm for Nested Loops wth Non-unform and Flow Dependences Sam-Jn Jeong Dept. of Informaton & Communcaton Engneerng, Cheonan Unversty, 5, Anseo-dong, Cheonan, Chungnam, 330-80, Korea. seong@cheonan.ac.kr
Parallelsm for Nested Loops wth Non-unform and Flow Dependences Sam-Jn Jeong Dept. of Informaton & Communcaton Engneerng, Cheonan Unversty, 5, Anseo-dong, Cheonan, Chungnam, 330-80, Korea. seong@cheonan.ac.kr
An Approach in Coloring Semi-Regular Tilings on the Hyperbolic Plane
 An Approach n Colorng Sem-Regular Tlngs on the Hyperbolc Plane Ma Louse Antonette N De Las Peñas, mlp@mathscmathadmueduph Glenn R Lago, glago@yahoocom Math Department, Ateneo de Manla Unversty, Loyola
An Approach n Colorng Sem-Regular Tlngs on the Hyperbolc Plane Ma Louse Antonette N De Las Peñas, mlp@mathscmathadmueduph Glenn R Lago, glago@yahoocom Math Department, Ateneo de Manla Unversty, Loyola
Integrating airborne LiDAR dataset and photographic images towards the construction of 3D building model
 IOP Conference Seres: Earth and Envronmental Scence OPEN ACCESS Integratng arborne LDAR dataset and photographc mages towards the constructon of 3D buldng model To cte ths artcle: R Idrs et al 2014 IOP
IOP Conference Seres: Earth and Envronmental Scence OPEN ACCESS Integratng arborne LDAR dataset and photographc mages towards the constructon of 3D buldng model To cte ths artcle: R Idrs et al 2014 IOP
Gender Classification using Interlaced Derivative Patterns
 Gender Classfcaton usng Interlaced Dervatve Patterns Author Shobernejad, Ameneh, Gao, Yongsheng Publshed 2 Conference Ttle Proceedngs of the 2th Internatonal Conference on Pattern Recognton (ICPR 2) DOI
Gender Classfcaton usng Interlaced Dervatve Patterns Author Shobernejad, Ameneh, Gao, Yongsheng Publshed 2 Conference Ttle Proceedngs of the 2th Internatonal Conference on Pattern Recognton (ICPR 2) DOI
Lecture 13: High-dimensional Images
 Lec : Hgh-dmensonal Images Grayscale Images Lecture : Hgh-dmensonal Images Math 90 Prof. Todd Wttman The Ctadel A grayscale mage s an nteger-valued D matrx. An 8-bt mage takes on values between 0 and 55.
Lec : Hgh-dmensonal Images Grayscale Images Lecture : Hgh-dmensonal Images Math 90 Prof. Todd Wttman The Ctadel A grayscale mage s an nteger-valued D matrx. An 8-bt mage takes on values between 0 and 55.
Pose Measurement Method and Experiments for High-Speed Rolling Targets in a Wind Tunnel
 Sensors 014, 14, 3933-3953; do:10.3390/s1413933 Artcle OPEN ACCESS sensors ISSN 144-80 www.mdp.com/journal/sensors Pose Measurement Method and Experments for Hgh-Speed Rollng Targets n a Wnd Tunnel Zhenyuan
Sensors 014, 14, 3933-3953; do:10.3390/s1413933 Artcle OPEN ACCESS sensors ISSN 144-80 www.mdp.com/journal/sensors Pose Measurement Method and Experments for Hgh-Speed Rollng Targets n a Wnd Tunnel Zhenyuan
Computer Graphics. Jeng-Sheng Yeh 葉正聖 Ming Chuan University (modified from Bing-Yu Chen s slides)
") Computer Graphcs Jeng-Sheng Yeh 葉正聖 Mng Chuan Unversty (modfed from Bng-Yu Chen s sldes) llumnaton and Shadng llumnaton Models Shadng Models for Polygons Surface Detal Shadows Transparency Global llumnaton
Computer Graphcs Jeng-Sheng Yeh 葉正聖 Mng Chuan Unversty (modfed from Bng-Yu Chen s sldes) llumnaton and Shadng llumnaton Models Shadng Models for Polygons Surface Detal Shadows Transparency Global llumnaton
Robust Watermarking for Text Images Based on Arnold Scrambling and DWT-DCT
 Internatonal Conference on Mechatroncs Electronc Industral and Control Engneerng (MEIC 015) Robust Watermarkng for Text Images Based on Arnold Scramblng and DWT-DCT Fan Wu College of Informaton Scence
Internatonal Conference on Mechatroncs Electronc Industral and Control Engneerng (MEIC 015) Robust Watermarkng for Text Images Based on Arnold Scramblng and DWT-DCT Fan Wu College of Informaton Scence
Calibration of an Articulated Camera System
 Calbraton of an Artculated Camera System CHEN Junzhou and Kn Hong WONG Department of Computer Scence and Engneerng The Chnese Unversty of Hong Kong {jzchen, khwong}@cse.cuhk.edu.hk Abstract Multple Camera
Calbraton of an Artculated Camera System CHEN Junzhou and Kn Hong WONG Department of Computer Scence and Engneerng The Chnese Unversty of Hong Kong {jzchen, khwong}@cse.cuhk.edu.hk Abstract Multple Camera