Generalized Nash Equilibrium Problem: existence, uniqueness and
|
|
|
- Kimberly Pope
- 5 years ago
- Views:
Transcription
1 Generalized Nash Equilibrium Problem: existence, uniqueness and reformulations Univ. de Perpignan, France CIMPA-UNESCO school, Delhi November 25 - December 6, 2013
2 Outline of the 7 lectures Generalized Nash Equilibrium a- Reformulations b- Existence of equilibrium Variational inequalities: motivations, definitions a- Motivations, definitions b- Existence of solutions c- Stability d- Uniqueness Quasiconvex optimization a- Classical subdifferential approach b- Normal approach Whenever a set-valued map is not really set-valued... Quasivariational inequalities
3 Outline of lecture 2 I- Classical approaches of quasiconvex analysis II- Normal approach a- First definitions b- Adjusted sublevel sets and normal operator III- Quasiconvex optimization a- Optimality conditions b- Convex constraint case c- Nonconvex constraint case
4 I - Introduction to quasiconvex optimization
5 Quasiconvexity A function f : X IR {+ } is said to be quasiconvex on K if, for all x, y K and all t [0, 1], f (tx + (1 t)y) max{f (x), f (y)}. or for all λ IR, the sublevel set S λ = {x X : f (x) λ} is convex.
6 Quasiconvexity A function f : X IR {+ } is said to be quasiconvex on K if, for all x, y K and all t [0, 1], or f (tx + (1 t)y) max{f (x), f (y)}. for all λ IR, the sublevel set S λ = {x X : f (x) λ} is convex. f differentiable f is quasiconvex iff df is quasimonotone iff df (x)(y x) > 0 df (y)(y x) 0
7 Quasiconvexity A function f : X IR {+ } is said to be quasiconvex on K if, for all x, y K and all t [0, 1], or f (tx + (1 t)y) max{f (x), f (y)}. for all λ IR, the sublevel set S λ = {x X : f (x) λ} is convex. f differentiable f is quasiconvex iff df is quasimonotone iff df (x)(y x) > 0 df (y)(y x) 0 f is quasiconvex iff f is quasimonotone iff x f (x) : x, y x > 0 y f (y), y, y x 0
8 Quasiconvexity A function f : X IR {+ } is said to be quasiconvex on K if, for all x, y K and all t [0, 1], f (tx + (1 t)y) max{f (x), f (y)}. or for all λ IR, the sublevel set S λ = {x X : f (x) λ} is convex. A function f : X IR {+ } is said to be semistrictly quasiconvex on K if, f is quasiconvex and for any x, y K, f (x) < f (y) f (z) < f (y), z [x, y[. convex semistrictly quasiconvex quasiconvex
9 Why not a subdifferential for quasiconvex programming?
10 Why not a subdifferential for quasiconvex programming? No (upper) semicontinuity of f if f is not supposed to be Lipschitz
11 Why not a subdifferential for quasiconvex programming? No (upper) semicontinuity of f if f is not supposed to be Lipschitz No sufficient optimality condition x S str ( f, C) = x arg min f C
12 II - Normal approach a- First definitions
13 A first approach Sublevel set: S λ = {x X : f (x) λ} S > λ = {x X : f (x) < λ} Normal operator: Define N f (x) : X 2 X by N f (x) = N(S f (x), x) = {x X : x, y x 0, y S f (x) }. With the corresponding definition for N > f (x)
14 But... N f (x) = N(S f (x), x) has no upper-semicontinuity properties N > f (x) = N(S > f (x), x) has no quasimonotonicity properties
15 But... N f (x) = N(S f (x), x) has no upper-semicontinuity properties N > f (x) = N(S > f (x), x) has no quasimonotonicity properties Example Define f : R 2 R by { a + b, if a + b 1 f (a, b) = 1, if a + b > 1. Then f is quasiconvex.
, x = (1, 2), y = (0, 10) and y = (2, 1).")
16 But... N f (x) = N(S f (x), x) has no upper-semicontinuity properties N > f (x) = N(S > f (x), x) has no quasimonotonicity properties Example Define f : R 2 R by { a + b, if a + b 1 f (a, b) = 1, if a + b > 1. Then f is quasiconvex. Consider x = (10, 0), x = (1, 2), y = (0, 10) and y = (2, 1). We see that x N < (x) and y N < (y) (since a + b < 1 implies (1, 2) (a 10, b) 0 and (2, 1) (a, b 10) 0) while x, y x > 0 and y, y x < 0. Hence N < is not quasimonotone.
17 But...another example N f (x) = N(S f (x), x) has no upper-semicontinuity properties N > f (x) = N(S > f (x), x) has no quasimonotonicity properties Example Then f is quasiconvex.
18 But...another example N f (x) = N(S f (x), x) has no upper-semicontinuity properties N > f (x) = N(S > f (x), x) has no quasimonotonicity properties Example Then f is quasiconvex. We easily see that N(x) is not upper semicontinuous...
 is not upper semicontinuous... These two operators are essentially adapted to the class of semi-strictly quasiconvex functions.")
19 But...another example N f (x) = N(S f (x), x) has no upper-semicontinuity properties N > f (x) = N(S > f (x), x) has no quasimonotonicity properties Example Then f is quasiconvex. We easily see that N(x) is not upper semicontinuous... These two operators are essentially adapted to the class of semi-strictly quasiconvex functions. Indeed in this case, for each x dom f \ arg min f, the sets S f (x) and S < f (x) have the same closure and N f (x) = N f < (x).
20 II - Normal approach b- Adjusted sublevel sets and normal operator
21 Definition Adjusted sublevel set For any x dom f, we define Sf a (x) = S f (x) B(S < f (x), ρ x) where ρ x = dist(x, S < f (x) ), if S < f (x) and Sf a(x) = S f (x) if S < f (x) =.
22 Definition Adjusted sublevel set For any x dom f, we define Sf a (x) = S f (x) B(S < f (x), ρ x) where ρ x = dist(x, S < f (x) ), if S < f (x) and Sf a(x) = S f (x) if S < f (x) =. S a f (x) coincides with S f (x) if cl(s > f (x) ) = S f (x)
23 Definition Adjusted sublevel set For any x dom f, we define Sf a (x) = S f (x) B(S < f (x), ρ x) where ρ x = dist(x, S < f (x) ), if S < f (x) and Sf a(x) = S f (x) if S < f (x) =. S a f (x) coincides with S f (x) if cl(s > f (x) ) = S f (x) e.g. f is semistrictly quasiconvex
24 Definition Adjusted sublevel set For any x dom f, we define Sf a (x) = S f (x) B(S < f (x), ρ x) where ρ x = dist(x, S < f (x) ), if S < f (x) and Sf a(x) = S f (x) if S < f (x) =. S a f (x) coincides with S f (x) if cl(s > f (x) ) = S f (x) e.g. f is semistrictly quasiconvex Proposition Let f : X IR {+ } be any function, with domain dom f. Then f is quasiconvex S a f (x) is convex, x dom f.
25 Proof Let us suppose that Sf a (u) is convex for every u dom f. We will show that for any x dom f, S f (x) is convex. If x arg min f then S f (x) = Sf a (x) is convex by assumption. Assume now that x / arg min f and take y, z S f (x). ) (S < f (x), ρx If both y and z belong to B If both y and z do not belong to B, then y, z S a f (x) thus [y, z] S a f (x) S f (x). (S < f (x), ρx ), then f (x) = f (y) = f (z), S < f (z) = S< f (y) = S< f (x) ) and ρ y, ρ z are positive. If, say, ρ y ρ z then y, z B (S < f (y), ρy thus y, z S a f (y) and [y, z] S a f (y) S f (y) = S f (x).
26 Proof Finally, suppose that only one of y, z, say z, belongs to B(S < f (x), ρx ) while y / B(S<, ρx ). Then f (x) f (x) = f (y), S < f (y) = S< and ρy > ρx f (x) ) ) so we have z B (S < f (x), ρx B (S < f (y), ρy and we deduce as before that [y, z] Sf a (y) S f (y) = S f (x). The other implication is straightforward.
27 Adjusted normal operator Adjusted sublevel set: For any x dom f, we define Sf a (x) = S f (x) B(S < f (x), ρ x) where ρ x = dist(x, S < f (x) ), if S < f (x). Ajusted normal operator: N a f (x) = {x X : x, y x 0, y S a f (x)}
28 Example x
29 Example x B(S < f (x), ρ x) S a f (x) = S f (x) B(S < f (x), ρ x)
 N a f (x) = {x X : x, y x 0, y S a f")
30 Example S a f (x) = S f (x) B(S < f (x), ρ x) N a f (x) = {x X : x, y x 0, y S a f (x)}
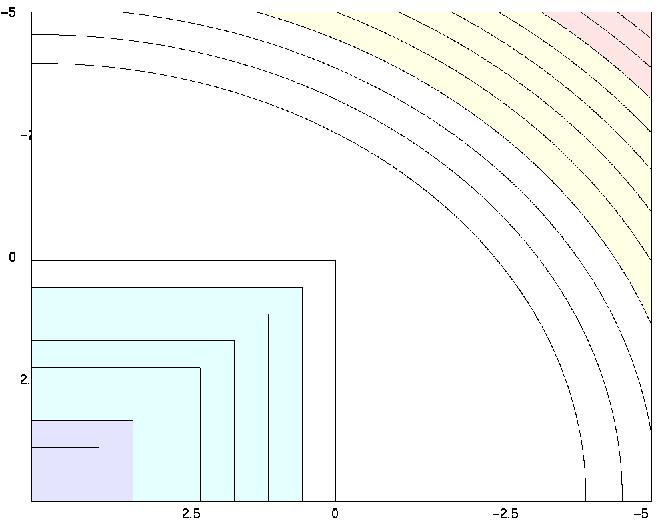
31 An exercice... Let us draw the normal operator value Nf a (x, y) at the points (x, y) = (0.5, 0.5), (x, y) = (0, 1), (x, y) = (1, 0), (x, y) = (1, 2), (x, y) = (1.5, 0) and (x, y) = (0.5, 2).
, (x, y) = (0, 1), (x, y) = (1, 0), (x, y) = (1, 2), (x, y) = (1.5, 0) and (x, y) = (0.5, 2).")
32 An exercice... Let us draw the normal operator value Nf a (x, y) at the points (x, y) = (0.5, 0.5), (x, y) = (0, 1), (x, y) = (1, 0), (x, y) = (1, 2), (x, y) = (1.5, 0) and (x, y) = (0.5, 2). Operator N a f provide information at any point!!!
33 Subdifferential vs normal operator One can have N a f (x) cone( f (x)) or cone( f (x)) N a f (x) Proposition f is quasiconvex and x dom f If there exists δ > 0 such that 0 L f (B(x, δ)) then [ cone( L f (x)) ] f (x) N a f (x). Proposition f is lsc semistrictly quasiconvex and 0 f (X ) then cone( f (x)) N a f (x). If additionally = and f is Lipschitz then N a f (x) = cone( f (x)).
34 Basic properties of N a f Nonemptyness: Proposition Let f : X IR {+ } be lsc. Assume that rad. continuous on dom f or dom f is convex and ints λ, λ > inf X f. Then f is quasiconvex Nf a (x) \ {0}, x dom f \ arg min f. Quasimonotonicity: The normal operator N a f is always quasimonotone
35 Upper sign-continuity T : X 2 X is said to be upper sign-continuous on K iff for any x, y K, one have : t ]0, 1[, where x t = (1 t)x + ty. inf x, y x 0 x T (x t) = sup x, y x 0 x T (x) upper semi-continuous upper hemicontinuous upper sign-continuous
36 locally upper sign continuity Definition Let T : K 2 X be a set-valued map. T is called locally upper sign-continuous on K if, for any x K there exist a neigh. V x of x and a upper sign-continuous set-valued map Φ x ( ) : V x 2 X with nonempty convex w -compact values such that Φ x (y) T (y) \ {0}, y V x
37 locally upper sign continuity Definition Let T : K 2 X be a set-valued map. T is called locally upper sign-continuous on K if, for any x K there exist a neigh. V x of x and a upper sign-continuous set-valued map Φ x ( ) : V x 2 X with nonempty convex w -compact values such that Φ x (y) T (y) \ {0}, y V x Continuity of normal operator Proposition Let f be lsc quasiconvex function such that int(s λ ), λ > inf f. Then N f is locally upper sign-continuous on dom f \ arg min f.
38 Proposition If f is quasiconvex such that int(s λ ), λ > inf f and f is lsc at x dom f \ arg min f, Then N a f is norm-to-w cone-usc at x. A multivalued map with conical valued T : X 2 X is said to be cone-usc at x dom T if there exists a neighbourhood U of x and a base C (u) of T (u), u U, such that u C (u) is usc at x.
39 Integration of N a f Let f : X IR {+ } quasiconvex Question: Is it possible to characterize the functions g : X IR {+ } quasiconvex such that N a f = N a g?
40 Integration of N a f Let f : X IR {+ } quasiconvex Question: Is it possible to characterize the functions g : X IR {+ } quasiconvex such that N a f = N a g? A first answer: Let C = {g : X IR {+ } cont. semistrictly quasiconvex such that argmin f is included in a closed hyperplane} Then, for any f, g C, N a f = N a g g is N a f \ {0}-pseudoconvex x N a f (x) \ {0} : x, y x 0 g(x) g(y).
41 Integration of N a f Let f : X IR {+ } quasiconvex Question: Is it possible to characterize the functions g : X IR {+ } quasiconvex such that N a f = N a g? A first answer: Let C = {g : X IR {+ } cont. semistrictly quasiconvex such that argmin f is included in a closed hyperplane} Then, for any f, g C, N a f = N a g g is N a f \ {0}-pseudoconvex x N a f (x) \ {0} : x, y x 0 g(x) g(y). General case: open question
42 IV Quasiconvex programming a- Optimality conditions
43 Quasiconvex programming Let f : X IR {+ } and K dom f be a convex subset. (P) find x K : f ( x) = inf x K f (x)
44 Quasiconvex programming Let f : X IR {+ } and K dom f be a convex subset. (P) find x K : f ( x) = inf x K f (x) Perfect case: f convex f : X IR {+ } a proper convex function K a nonempty convex subset of X, x K + C.Q. Then f ( x) = inf x K f (x) x S str ( f, K)
45 Quasiconvex programming Let f : X IR {+ } and K dom f be a convex subset. (P) find x K : f ( x) = inf x K f (x) Perfect case: f convex f : X IR {+ } a proper convex function K a nonempty convex subset of X, x K + C.Q. Then f ( x) = inf x K x S str ( f, K) What about f quasiconvex case? x S str ( f ( x), K) = x arg min f K
46 Sufficient optimality condition Theorem f : X IR {+ } quasiconvex, radially cont. on dom f C X such that conv(c) dom f. Suppose that C int(dom f ) or AffC = X. Then x S(N a f \ {0}, C) = x C, f ( x) f (x). where x S(N a f \ {0}, K) means that there exists x N a f ( x) \ {0} such that x, c x 0, c C.
47 Lemma Let f : X IR {+ } be a quasiconvex function, radially continuous on dom f. Then f is N a f \ {0}-pseudoconvex on int(dom f ), that is, x N a f (x) \ {0} : x, y x 0 f (y) f (x). Proof. Let x, y int(dom f ). According to the quasiconvexity of f, Nf a (x) \ {0} is nonempty. Let us suppose that x, y x 0 with x Nf a (x) \ {0}. Let d X be such that x, y n x > 0 for any n, where y n = y + n 1 d ( dom f for n large enough). This implies that y n S < (x) since x N a f f (x) N< (x). f It follows by the radial continuity of f that f (y) f (x).
48 Necessary and Sufficient conditions Proposition Let C be a closed convex subset of X, x C and f : X IR be continuous semistrictly quasiconvex such that int(sf a ( x)) and f ( x) > inf X f. Then the following assertions are equivalent: i) f ( x) = min C f ii) x S str (N a f \ {0}, C) iii) 0 Nf a ( x) \ {0} + NK(C, x).
49 Proposition Let C be a closed convex subset of an Asplund space X and f : X IR be a continuous quasiconvex function. Suppose that either f is sequentially normally sub-compact or C is sequentially normally compact. If x C is such that 0 L f ( x) and 0 f ( x) \ {0} + NK(C, x) then the following assertions are equivalent: i) f ( x) = min C f ii) x L f ( x) \ {0} + NK(C, x) iii) 0 Nf a ( x) \ {0} + NK(C, x)
50 References D. A. & N. Hadjisavvas, Adjusted sublevel sets, normal operator and quasiconvex programming, SIAM J. Optim., 16 (2005), D. Aussel & J. Ye, Quasiconvex minimization on locally finite union of convex sets, J. Optim. Th. Appl., 139 (2008), no. 1, 116. D. Aussel & J. Ye, Quasiconvex programming with starshaped constraint region and application to quasiconvex MPEC, Optimization 55 (2006),
51 Appendix 5 - Normally compactness A subset C is said to be sequentially normally compact at x C if for any sequence (x k ) k C converging to x and any sequence (x k ) k, x k NF (C, x k ) weakly converging to 0, one has x k 0. Examples: X finite dimensional space C epi-lipschitz at x C convex with nonempty interior A function f is said to be sequentially normally subcompact at x C if the sublevel set S f (x) is sequentially normally compact at x. Examples: X finite dimensional space f is locally Lipschitz around x and 0 L f (x) f is quasiconvex with int(s f (x) )
52 Appendix 2 - Limiting Normal Cone Let C be any nonempty subset of X and x C. The limiting normal cone to C at x, denoted by N L (C, x) is defined by N L (C, x) = lim sup N F (C, x ) x x where the Frèchet normal cone N F (C, x ) is defined by { N F (C, x ) = x X x, u x : lim sup u x, u C u x 0 }. The limiting normal cone is closed (but in general non convex)
53 Appendix - Limiting subdifferential One can define the Limiting subdifferential (in the sense of Mordukhovich), and its asymptotic associated form, of a function f : X IR {+ } by L f (x) f (x) = Limsup y f x F f (y) = { x X : (x, 1) N L (epi f, (x, f (x))) } = Limsup f λ F f (y) y x λ 0 = { x X : (x, 0) N L (epi f, (x, f (x))) }.
MTAEA Convexity and Quasiconvexity
 School of Economics, Australian National University February 19, 2010 Convex Combinations and Convex Sets. Definition. Given any finite collection of points x 1,..., x m R n, a point z R n is said to be
School of Economics, Australian National University February 19, 2010 Convex Combinations and Convex Sets. Definition. Given any finite collection of points x 1,..., x m R n, a point z R n is said to be
Lecture 19: Convex Non-Smooth Optimization. April 2, 2007
 : Convex Non-Smooth Optimization April 2, 2007 Outline Lecture 19 Convex non-smooth problems Examples Subgradients and subdifferentials Subgradient properties Operations with subgradients and subdifferentials
: Convex Non-Smooth Optimization April 2, 2007 Outline Lecture 19 Convex non-smooth problems Examples Subgradients and subdifferentials Subgradient properties Operations with subgradients and subdifferentials
Convex sets and convex functions
 Convex sets and convex functions Convex optimization problems Convex sets and their examples Separating and supporting hyperplanes Projections on convex sets Convex functions, conjugate functions ECE 602,
Convex sets and convex functions Convex optimization problems Convex sets and their examples Separating and supporting hyperplanes Projections on convex sets Convex functions, conjugate functions ECE 602,
Aspects of Convex, Nonconvex, and Geometric Optimization (Lecture 1) Suvrit Sra Massachusetts Institute of Technology
 Suvrit Sra Massachusetts Institute of Technology") Aspects of Convex, Nonconvex, and Geometric Optimization (Lecture 1) Suvrit Sra Massachusetts Institute of Technology Hausdorff Institute for Mathematics (HIM) Trimester: Mathematics of Signal Processing
Aspects of Convex, Nonconvex, and Geometric Optimization (Lecture 1) Suvrit Sra Massachusetts Institute of Technology Hausdorff Institute for Mathematics (HIM) Trimester: Mathematics of Signal Processing
Convex sets and convex functions
 Convex sets and convex functions Convex optimization problems Convex sets and their examples Separating and supporting hyperplanes Projections on convex sets Convex functions, conjugate functions ECE 602,
Convex sets and convex functions Convex optimization problems Convex sets and their examples Separating and supporting hyperplanes Projections on convex sets Convex functions, conjugate functions ECE 602,
Generalized Convex Set-Valued Maps
 Generalized Convex Set-Valued Maps September 20, 2008 Joël Benoist Department of Mathematics LACO URA-CNRS 1586 University of Limoges 87060 Limoges, France E-mail: benoist@unilim.fr Nicolae Popovici Faculty
Generalized Convex Set-Valued Maps September 20, 2008 Joël Benoist Department of Mathematics LACO URA-CNRS 1586 University of Limoges 87060 Limoges, France E-mail: benoist@unilim.fr Nicolae Popovici Faculty
Numerical Optimization
 Convex Sets Computer Science and Automation Indian Institute of Science Bangalore 560 012, India. NPTEL Course on Let x 1, x 2 R n, x 1 x 2. Line and line segment Line passing through x 1 and x 2 : {y
Convex Sets Computer Science and Automation Indian Institute of Science Bangalore 560 012, India. NPTEL Course on Let x 1, x 2 R n, x 1 x 2. Line and line segment Line passing through x 1 and x 2 : {y
SOME REMARKS CONCERNING D METRIC SPACES
 SOME REMARKS CONCERNING D METRIC SPACES Zead Mustafa and Brailey Sims November 2003 Abstract In this note we make some remarks concerning D metric spaces, and present some examples which show that many
SOME REMARKS CONCERNING D METRIC SPACES Zead Mustafa and Brailey Sims November 2003 Abstract In this note we make some remarks concerning D metric spaces, and present some examples which show that many
Lecture 19 Subgradient Methods. November 5, 2008
 Subgradient Methods November 5, 2008 Outline Lecture 19 Subgradients and Level Sets Subgradient Method Convergence and Convergence Rate Convex Optimization 1 Subgradients and Level Sets A vector s is a
Subgradient Methods November 5, 2008 Outline Lecture 19 Subgradients and Level Sets Subgradient Method Convergence and Convergence Rate Convex Optimization 1 Subgradients and Level Sets A vector s is a
Locally convex topological vector spaces
 Chapter 4 Locally convex topological vector spaces 4.1 Definition by neighbourhoods Let us start this section by briefly recalling some basic properties of convex subsets of a vector space over K (where
Chapter 4 Locally convex topological vector spaces 4.1 Definition by neighbourhoods Let us start this section by briefly recalling some basic properties of convex subsets of a vector space over K (where
Shiqian Ma, MAT-258A: Numerical Optimization 1. Chapter 2. Convex Optimization
 Shiqian Ma, MAT-258A: Numerical Optimization 1 Chapter 2 Convex Optimization Shiqian Ma, MAT-258A: Numerical Optimization 2 2.1. Convex Optimization General optimization problem: min f 0 (x) s.t., f i
Shiqian Ma, MAT-258A: Numerical Optimization 1 Chapter 2 Convex Optimization Shiqian Ma, MAT-258A: Numerical Optimization 2 2.1. Convex Optimization General optimization problem: min f 0 (x) s.t., f i
Lecture 2 September 3
 EE 381V: Large Scale Optimization Fall 2012 Lecture 2 September 3 Lecturer: Caramanis & Sanghavi Scribe: Hongbo Si, Qiaoyang Ye 2.1 Overview of the last Lecture The focus of the last lecture was to give
EE 381V: Large Scale Optimization Fall 2012 Lecture 2 September 3 Lecturer: Caramanis & Sanghavi Scribe: Hongbo Si, Qiaoyang Ye 2.1 Overview of the last Lecture The focus of the last lecture was to give
COM Optimization for Communications Summary: Convex Sets and Convex Functions
 1 Convex Sets Affine Sets COM524500 Optimization for Communications Summary: Convex Sets and Convex Functions A set C R n is said to be affine if A point x 1, x 2 C = θx 1 + (1 θ)x 2 C, θ R (1) y = k θ
1 Convex Sets Affine Sets COM524500 Optimization for Communications Summary: Convex Sets and Convex Functions A set C R n is said to be affine if A point x 1, x 2 C = θx 1 + (1 θ)x 2 C, θ R (1) y = k θ
60 2 Convex sets. {x a T x b} {x ã T x b}
 60 2 Convex sets Exercises Definition of convexity 21 Let C R n be a convex set, with x 1,, x k C, and let θ 1,, θ k R satisfy θ i 0, θ 1 + + θ k = 1 Show that θ 1x 1 + + θ k x k C (The definition of convexity
60 2 Convex sets Exercises Definition of convexity 21 Let C R n be a convex set, with x 1,, x k C, and let θ 1,, θ k R satisfy θ i 0, θ 1 + + θ k = 1 Show that θ 1x 1 + + θ k x k C (The definition of convexity
Lecture 2. Topology of Sets in R n. August 27, 2008
 Lecture 2 Topology of Sets in R n August 27, 2008 Outline Vectors, Matrices, Norms, Convergence Open and Closed Sets Special Sets: Subspace, Affine Set, Cone, Convex Set Special Convex Sets: Hyperplane,
Lecture 2 Topology of Sets in R n August 27, 2008 Outline Vectors, Matrices, Norms, Convergence Open and Closed Sets Special Sets: Subspace, Affine Set, Cone, Convex Set Special Convex Sets: Hyperplane,
Topology problem set Integration workshop 2010
 Topology problem set Integration workshop 2010 July 28, 2010 1 Topological spaces and Continuous functions 1.1 If T 1 and T 2 are two topologies on X, show that (X, T 1 T 2 ) is also a topological space.
Topology problem set Integration workshop 2010 July 28, 2010 1 Topological spaces and Continuous functions 1.1 If T 1 and T 2 are two topologies on X, show that (X, T 1 T 2 ) is also a topological space.
Lecture 4: Convexity
 10-725: Convex Optimization Fall 2013 Lecture 4: Convexity Lecturer: Barnabás Póczos Scribes: Jessica Chemali, David Fouhey, Yuxiong Wang Note: LaTeX template courtesy of UC Berkeley EECS dept. Disclaimer:
10-725: Convex Optimization Fall 2013 Lecture 4: Convexity Lecturer: Barnabás Póczos Scribes: Jessica Chemali, David Fouhey, Yuxiong Wang Note: LaTeX template courtesy of UC Berkeley EECS dept. Disclaimer:
Convex Optimization. 2. Convex Sets. Prof. Ying Cui. Department of Electrical Engineering Shanghai Jiao Tong University. SJTU Ying Cui 1 / 33
 Convex Optimization 2. Convex Sets Prof. Ying Cui Department of Electrical Engineering Shanghai Jiao Tong University 2018 SJTU Ying Cui 1 / 33 Outline Affine and convex sets Some important examples Operations
Convex Optimization 2. Convex Sets Prof. Ying Cui Department of Electrical Engineering Shanghai Jiao Tong University 2018 SJTU Ying Cui 1 / 33 Outline Affine and convex sets Some important examples Operations
2. Convex sets. x 1. x 2. affine set: contains the line through any two distinct points in the set
 2. Convex sets Convex Optimization Boyd & Vandenberghe affine and convex sets some important examples operations that preserve convexity generalized inequalities separating and supporting hyperplanes dual
2. Convex sets Convex Optimization Boyd & Vandenberghe affine and convex sets some important examples operations that preserve convexity generalized inequalities separating and supporting hyperplanes dual
Convex Optimization. Convex Sets. ENSAE: Optimisation 1/24
 Convex Optimization Convex Sets ENSAE: Optimisation 1/24 Today affine and convex sets some important examples operations that preserve convexity generalized inequalities separating and supporting hyperplanes
Convex Optimization Convex Sets ENSAE: Optimisation 1/24 Today affine and convex sets some important examples operations that preserve convexity generalized inequalities separating and supporting hyperplanes
THREE LECTURES ON BASIC TOPOLOGY. 1. Basic notions.
 THREE LECTURES ON BASIC TOPOLOGY PHILIP FOTH 1. Basic notions. Let X be a set. To make a topological space out of X, one must specify a collection T of subsets of X, which are said to be open subsets of
THREE LECTURES ON BASIC TOPOLOGY PHILIP FOTH 1. Basic notions. Let X be a set. To make a topological space out of X, one must specify a collection T of subsets of X, which are said to be open subsets of
M3P1/M4P1 (2005) Dr M Ruzhansky Metric and Topological Spaces Summary of the course: definitions, examples, statements.
 Dr M Ruzhansky Metric and Topological Spaces Summary of the course: definitions, examples, statements.") M3P1/M4P1 (2005) Dr M Ruzhansky Metric and Topological Spaces Summary of the course: definitions, examples, statements. Chapter 1: Metric spaces and convergence. (1.1) Recall the standard distance function
M3P1/M4P1 (2005) Dr M Ruzhansky Metric and Topological Spaces Summary of the course: definitions, examples, statements. Chapter 1: Metric spaces and convergence. (1.1) Recall the standard distance function
Math 5593 Linear Programming Lecture Notes
 Math 5593 Linear Programming Lecture Notes Unit II: Theory & Foundations (Convex Analysis) University of Colorado Denver, Fall 2013 Topics 1 Convex Sets 1 1.1 Basic Properties (Luenberger-Ye Appendix B.1).........................
Math 5593 Linear Programming Lecture Notes Unit II: Theory & Foundations (Convex Analysis) University of Colorado Denver, Fall 2013 Topics 1 Convex Sets 1 1.1 Basic Properties (Luenberger-Ye Appendix B.1).........................
2. Convex sets. affine and convex sets. some important examples. operations that preserve convexity. generalized inequalities
 2. Convex sets Convex Optimization Boyd & Vandenberghe affine and convex sets some important examples operations that preserve convexity generalized inequalities separating and supporting hyperplanes dual
2. Convex sets Convex Optimization Boyd & Vandenberghe affine and convex sets some important examples operations that preserve convexity generalized inequalities separating and supporting hyperplanes dual
Convexity: an introduction
 Convexity: an introduction Geir Dahl CMA, Dept. of Mathematics and Dept. of Informatics University of Oslo 1 / 74 1. Introduction 1. Introduction what is convexity where does it arise main concepts and
Convexity: an introduction Geir Dahl CMA, Dept. of Mathematics and Dept. of Informatics University of Oslo 1 / 74 1. Introduction 1. Introduction what is convexity where does it arise main concepts and
New optimality conditions for the semivectorial bilevel optimization problem
 New optimality conditions for the semivectorial bilevel optimization problem November 3, 2011 STEPHAN DEMPE 1, NAZIH GADHI 2 and ALAIN B. ZEMKOHO 1 Abstract. The paper is concerned with the optimistic
New optimality conditions for the semivectorial bilevel optimization problem November 3, 2011 STEPHAN DEMPE 1, NAZIH GADHI 2 and ALAIN B. ZEMKOHO 1 Abstract. The paper is concerned with the optimistic
Introduction to Modern Control Systems
 Introduction to Modern Control Systems Convex Optimization, Duality and Linear Matrix Inequalities Kostas Margellos University of Oxford AIMS CDT 2016-17 Introduction to Modern Control Systems November
Introduction to Modern Control Systems Convex Optimization, Duality and Linear Matrix Inequalities Kostas Margellos University of Oxford AIMS CDT 2016-17 Introduction to Modern Control Systems November
Convex Optimization Lecture 2
 Convex Optimization Lecture 2 Today: Convex Analysis Center-of-mass Algorithm 1 Convex Analysis Convex Sets Definition: A set C R n is convex if for all x, y C and all 0 λ 1, λx + (1 λ)y C Operations that
Convex Optimization Lecture 2 Today: Convex Analysis Center-of-mass Algorithm 1 Convex Analysis Convex Sets Definition: A set C R n is convex if for all x, y C and all 0 λ 1, λx + (1 λ)y C Operations that
A Little Point Set Topology
 A Little Point Set Topology A topological space is a generalization of a metric space that allows one to talk about limits, convergence, continuity and so on without requiring the concept of a distance
A Little Point Set Topology A topological space is a generalization of a metric space that allows one to talk about limits, convergence, continuity and so on without requiring the concept of a distance
GENERALIZED METRIC SPACES AND TOPOLOGICAL STRUCTURE I
 ANALELE ŞTIINŢIFICE ALE UNIVERSITĂŢII AL.I.CUZA IAŞI Tomul XLVI, s.i a, Matematică, 2000, f.1. GENERALIZED METRIC SPACES AND TOPOLOGICAL STRUCTURE I BY B.C. DHAGE Abstract. In this paper some results in
ANALELE ŞTIINŢIFICE ALE UNIVERSITĂŢII AL.I.CUZA IAŞI Tomul XLVI, s.i a, Matematică, 2000, f.1. GENERALIZED METRIC SPACES AND TOPOLOGICAL STRUCTURE I BY B.C. DHAGE Abstract. In this paper some results in
Compact Sets. James K. Peterson. September 15, Department of Biological Sciences and Department of Mathematical Sciences Clemson University
 Compact Sets James K. Peterson Department of Biological Sciences and Department of Mathematical Sciences Clemson University September 15, 2017 Outline 1 Closed Sets 2 Compactness 3 Homework Closed Sets
Compact Sets James K. Peterson Department of Biological Sciences and Department of Mathematical Sciences Clemson University September 15, 2017 Outline 1 Closed Sets 2 Compactness 3 Homework Closed Sets
IDENTIFYING ACTIVE MANIFOLDS
 Algorithmic Operations Research Vol.2 (2007) 75 82 IDENTIFYING ACTIVE MANIFOLDS W.L. Hare a a Department of Mathematics, Simon Fraser University, Burnaby, BC V5A 1S6, Canada. A.S. Lewis b b School of ORIE,
Algorithmic Operations Research Vol.2 (2007) 75 82 IDENTIFYING ACTIVE MANIFOLDS W.L. Hare a a Department of Mathematics, Simon Fraser University, Burnaby, BC V5A 1S6, Canada. A.S. Lewis b b School of ORIE,
Lecture 2 - Introduction to Polytopes
 Lecture 2 - Introduction to Polytopes Optimization and Approximation - ENS M1 Nicolas Bousquet 1 Reminder of Linear Algebra definitions Let x 1,..., x m be points in R n and λ 1,..., λ m be real numbers.
Lecture 2 - Introduction to Polytopes Optimization and Approximation - ENS M1 Nicolas Bousquet 1 Reminder of Linear Algebra definitions Let x 1,..., x m be points in R n and λ 1,..., λ m be real numbers.
Some fixed fuzzy point results using Hausdorff metric in fuzzy metric spaces
 Annals of Fuzzy Mathematics and Informatics Volume 13, No 5, (May 017), pp 641 650 ISSN: 093 9310 (print version) ISSN: 87 635 (electronic version) http://wwwafmiorkr @FMI c Kyung Moon Sa Co http://wwwkyungmooncom
Annals of Fuzzy Mathematics and Informatics Volume 13, No 5, (May 017), pp 641 650 ISSN: 093 9310 (print version) ISSN: 87 635 (electronic version) http://wwwafmiorkr @FMI c Kyung Moon Sa Co http://wwwkyungmooncom
Distance-to-Solution Estimates for Optimization Problems with Constraints in Standard Form
 Distance-to-Solution Estimates for Optimization Problems with Constraints in Standard Form Philip E. Gill Vyacheslav Kungurtsev Daniel P. Robinson UCSD Center for Computational Mathematics Technical Report
Distance-to-Solution Estimates for Optimization Problems with Constraints in Standard Form Philip E. Gill Vyacheslav Kungurtsev Daniel P. Robinson UCSD Center for Computational Mathematics Technical Report
Conic Duality. yyye
 Conic Linear Optimization and Appl. MS&E314 Lecture Note #02 1 Conic Duality Yinyu Ye Department of Management Science and Engineering Stanford University Stanford, CA 94305, U.S.A. http://www.stanford.edu/
Conic Linear Optimization and Appl. MS&E314 Lecture Note #02 1 Conic Duality Yinyu Ye Department of Management Science and Engineering Stanford University Stanford, CA 94305, U.S.A. http://www.stanford.edu/
However, this is not always true! For example, this fails if both A and B are closed and unbounded (find an example).
.") 98 CHAPTER 3. PROPERTIES OF CONVEX SETS: A GLIMPSE 3.2 Separation Theorems It seems intuitively rather obvious that if A and B are two nonempty disjoint convex sets in A 2, then there is a line, H, separating
98 CHAPTER 3. PROPERTIES OF CONVEX SETS: A GLIMPSE 3.2 Separation Theorems It seems intuitively rather obvious that if A and B are two nonempty disjoint convex sets in A 2, then there is a line, H, separating
Lecture 2: August 31
 10-725/36-725: Convex Optimization Fall 2016 Lecture 2: August 31 Lecturer: Lecturer: Ryan Tibshirani Scribes: Scribes: Lidan Mu, Simon Du, Binxuan Huang 2.1 Review A convex optimization problem is of
10-725/36-725: Convex Optimization Fall 2016 Lecture 2: August 31 Lecturer: Lecturer: Ryan Tibshirani Scribes: Scribes: Lidan Mu, Simon Du, Binxuan Huang 2.1 Review A convex optimization problem is of
Math 414 Lecture 2 Everyone have a laptop?
 Math 44 Lecture 2 Everyone have a laptop? THEOREM. Let v,...,v k be k vectors in an n-dimensional space and A = [v ;...; v k ] v,..., v k independent v,..., v k span the space v,..., v k a basis v,...,
Math 44 Lecture 2 Everyone have a laptop? THEOREM. Let v,...,v k be k vectors in an n-dimensional space and A = [v ;...; v k ] v,..., v k independent v,..., v k span the space v,..., v k a basis v,...,
Walheer Barnabé. Topics in Mathematics Practical Session 2 - Topology & Convex
 Topics in Mathematics Practical Session 2 - Topology & Convex Sets Outline (i) Set membership and set operations (ii) Closed and open balls/sets (iii) Points (iv) Sets (v) Convex Sets Set Membership and
Topics in Mathematics Practical Session 2 - Topology & Convex Sets Outline (i) Set membership and set operations (ii) Closed and open balls/sets (iii) Points (iv) Sets (v) Convex Sets Set Membership and
Convexity Theory and Gradient Methods
 Convexity Theory and Gradient Methods Angelia Nedić angelia@illinois.edu ISE Department and Coordinated Science Laboratory University of Illinois at Urbana-Champaign Outline Convex Functions Optimality
Convexity Theory and Gradient Methods Angelia Nedić angelia@illinois.edu ISE Department and Coordinated Science Laboratory University of Illinois at Urbana-Champaign Outline Convex Functions Optimality
Convex Optimization - Chapter 1-2. Xiangru Lian August 28, 2015
 Convex Optimization - Chapter 1-2 Xiangru Lian August 28, 2015 1 Mathematical optimization minimize f 0 (x) s.t. f j (x) 0, j=1,,m, (1) x S x. (x 1,,x n ). optimization variable. f 0. R n R. objective
Convex Optimization - Chapter 1-2 Xiangru Lian August 28, 2015 1 Mathematical optimization minimize f 0 (x) s.t. f j (x) 0, j=1,,m, (1) x S x. (x 1,,x n ). optimization variable. f 0. R n R. objective
Open and Closed Sets
 Open and Closed Sets Definition: A subset S of a metric space (X, d) is open if it contains an open ball about each of its points i.e., if x S : ɛ > 0 : B(x, ɛ) S. (1) Theorem: (O1) and X are open sets.
Open and Closed Sets Definition: A subset S of a metric space (X, d) is open if it contains an open ball about each of its points i.e., if x S : ɛ > 0 : B(x, ɛ) S. (1) Theorem: (O1) and X are open sets.
Affine function. suppose f : R n R m is affine (f(x) =Ax + b with A R m n, b R m ) the image of a convex set under f is convex
 =Ax + b with A R m n, b R m ) the image of a convex set under f is convex") Affine function suppose f : R n R m is affine (f(x) =Ax + b with A R m n, b R m ) the image of a convex set under f is convex S R n convex = f(s) ={f(x) x S} convex the inverse image f 1 (C) of a convex
Affine function suppose f : R n R m is affine (f(x) =Ax + b with A R m n, b R m ) the image of a convex set under f is convex S R n convex = f(s) ={f(x) x S} convex the inverse image f 1 (C) of a convex
Stability of closedness of convex cones under linear mappings
 Stability of closedness of convex cones under linear mappings Jonathan M. Borwein and Warren B. Moors 1 Abstract. In this paper we reconsider the question of when the continuous linear image of a closed
Stability of closedness of convex cones under linear mappings Jonathan M. Borwein and Warren B. Moors 1 Abstract. In this paper we reconsider the question of when the continuous linear image of a closed
Sparse Optimization Lecture: Proximal Operator/Algorithm and Lagrange Dual
 Sparse Optimization Lecture: Proximal Operator/Algorithm and Lagrange Dual Instructor: Wotao Yin July 2013 online discussions on piazza.com Those who complete this lecture will know learn the proximal
Sparse Optimization Lecture: Proximal Operator/Algorithm and Lagrange Dual Instructor: Wotao Yin July 2013 online discussions on piazza.com Those who complete this lecture will know learn the proximal
Convex Sets. Pontus Giselsson
 Convex Sets Pontus Giselsson 1 Today s lecture convex sets convex, affine, conical hulls closure, interior, relative interior, boundary, relative boundary separating and supporting hyperplane theorems
Convex Sets Pontus Giselsson 1 Today s lecture convex sets convex, affine, conical hulls closure, interior, relative interior, boundary, relative boundary separating and supporting hyperplane theorems
EC 521 MATHEMATICAL METHODS FOR ECONOMICS. Lecture 2: Convex Sets
 EC 51 MATHEMATICAL METHODS FOR ECONOMICS Lecture : Convex Sets Murat YILMAZ Boğaziçi University In this section, we focus on convex sets, separating hyperplane theorems and Farkas Lemma. And as an application
EC 51 MATHEMATICAL METHODS FOR ECONOMICS Lecture : Convex Sets Murat YILMAZ Boğaziçi University In this section, we focus on convex sets, separating hyperplane theorems and Farkas Lemma. And as an application
Combined Reformulation of Bilevel Programming Problems
 Schedae Informaticae Vol. 21 (2012): 65 79 doi: 10.4467/20838476SI.12.005.0815 Combined Reformulation of Bilevel Programming Problems Maria Pilecka Department of Mathematics and Computer Science, TU Bergakademie
Schedae Informaticae Vol. 21 (2012): 65 79 doi: 10.4467/20838476SI.12.005.0815 Combined Reformulation of Bilevel Programming Problems Maria Pilecka Department of Mathematics and Computer Science, TU Bergakademie
ISSN X (print) COMPACTNESS OF S(n)-CLOSED SPACES
 COMPACTNESS OF S(n)-CLOSED SPACES") Matematiqki Bilten ISSN 0351-336X (print) 41(LXVII) No. 2 ISSN 1857-9914 (online) 2017(30-38) UDC: 515.122.2 Skopje, Makedonija COMPACTNESS OF S(n)-CLOSED SPACES IVAN LONČAR Abstract. The aim of this paper
Matematiqki Bilten ISSN 0351-336X (print) 41(LXVII) No. 2 ISSN 1857-9914 (online) 2017(30-38) UDC: 515.122.2 Skopje, Makedonija COMPACTNESS OF S(n)-CLOSED SPACES IVAN LONČAR Abstract. The aim of this paper
FACES OF CONVEX SETS
 FACES OF CONVEX SETS VERA ROSHCHINA Abstract. We remind the basic definitions of faces of convex sets and their basic properties. For more details see the classic references [1, 2] and [4] for polytopes.
FACES OF CONVEX SETS VERA ROSHCHINA Abstract. We remind the basic definitions of faces of convex sets and their basic properties. For more details see the classic references [1, 2] and [4] for polytopes.
Convexity and Optimization
 Convexity and Optimization Richard Lusby Department of Management Engineering Technical University of Denmark Today s Material Extrema Convex Function Convex Sets Other Convexity Concepts Unconstrained
Convexity and Optimization Richard Lusby Department of Management Engineering Technical University of Denmark Today s Material Extrema Convex Function Convex Sets Other Convexity Concepts Unconstrained
Topological properties of convex sets
 Division of the Humanities and Social Sciences Ec 181 KC Border Convex Analysis and Economic Theory Winter 2018 Topic 5: Topological properties of convex sets 5.1 Interior and closure of convex sets Let
Division of the Humanities and Social Sciences Ec 181 KC Border Convex Analysis and Economic Theory Winter 2018 Topic 5: Topological properties of convex sets 5.1 Interior and closure of convex sets Let
Lecture 2: August 29, 2018
 10-725/36-725: Convex Optimization Fall 2018 Lecturer: Ryan Tibshirani Lecture 2: August 29, 2018 Scribes: Yingjing Lu, Adam Harley, Ruosong Wang Note: LaTeX template courtesy of UC Berkeley EECS dept.
10-725/36-725: Convex Optimization Fall 2018 Lecturer: Ryan Tibshirani Lecture 2: August 29, 2018 Scribes: Yingjing Lu, Adam Harley, Ruosong Wang Note: LaTeX template courtesy of UC Berkeley EECS dept.
Epimorphisms in the Category of Hausdorff Fuzzy Topological Spaces
 Annals of Pure and Applied Mathematics Vol. 7, No. 1, 2014, 35-40 ISSN: 2279-087X (P), 2279-0888(online) Published on 9 September 2014 www.researchmathsci.org Annals of Epimorphisms in the Category of
Annals of Pure and Applied Mathematics Vol. 7, No. 1, 2014, 35-40 ISSN: 2279-087X (P), 2279-0888(online) Published on 9 September 2014 www.researchmathsci.org Annals of Epimorphisms in the Category of
Bounded subsets of topological vector spaces
 Chapter 2 Bounded subsets of topological vector spaces In this chapter we will study the notion of bounded set in any t.v.s. and analyzing some properties which will be useful in the following and especially
Chapter 2 Bounded subsets of topological vector spaces In this chapter we will study the notion of bounded set in any t.v.s. and analyzing some properties which will be useful in the following and especially
Convex Geometry arising in Optimization
 Convex Geometry arising in Optimization Jesús A. De Loera University of California, Davis Berlin Mathematical School Summer 2015 WHAT IS THIS COURSE ABOUT? Combinatorial Convexity and Optimization PLAN
Convex Geometry arising in Optimization Jesús A. De Loera University of California, Davis Berlin Mathematical School Summer 2015 WHAT IS THIS COURSE ABOUT? Combinatorial Convexity and Optimization PLAN
Optimization and Equilibrium Problems with Equilibrium Constraints
 Wayne State University Mathematics Research Reports Mathematics 9-1-2003 Optimization and Equilibrium Problems with Equilibrium Constraints Boris S. Mordukhovich Wayne State University, boris@math.wayne.edu
Wayne State University Mathematics Research Reports Mathematics 9-1-2003 Optimization and Equilibrium Problems with Equilibrium Constraints Boris S. Mordukhovich Wayne State University, boris@math.wayne.edu
FUZZY METRIC SPACES ZUN-QUAN XIA AND FANG-FANG GUO
 J. Appl. Math. & Computing Vol. 16(2004), No. 1-2, pp. 371-381 FUZZY METRIC SPACES ZUN-QUAN XIA AND FANG-FANG GUO Abstract. In this paper, fuzzy metric spaces are redefined, different from the previous
J. Appl. Math. & Computing Vol. 16(2004), No. 1-2, pp. 371-381 FUZZY METRIC SPACES ZUN-QUAN XIA AND FANG-FANG GUO Abstract. In this paper, fuzzy metric spaces are redefined, different from the previous
MATH 54 - LECTURE 10
 MATH 54 - LECTURE 10 DAN CRYTSER The Universal Mapping Property First we note that each of the projection mappings π i : j X j X i is continuous when i X i is given the product topology (also if the product
MATH 54 - LECTURE 10 DAN CRYTSER The Universal Mapping Property First we note that each of the projection mappings π i : j X j X i is continuous when i X i is given the product topology (also if the product
LECTURE 10 LECTURE OUTLINE
 We now introduce a new concept with important theoretical and algorithmic implications: polyhedral convexity, extreme points, and related issues. LECTURE 1 LECTURE OUTLINE Polar cones and polar cone theorem
We now introduce a new concept with important theoretical and algorithmic implications: polyhedral convexity, extreme points, and related issues. LECTURE 1 LECTURE OUTLINE Polar cones and polar cone theorem
Convex Sets. CSCI5254: Convex Optimization & Its Applications. subspaces, affine sets, and convex sets. operations that preserve convexity
 CSCI5254: Convex Optimization & Its Applications Convex Sets subspaces, affine sets, and convex sets operations that preserve convexity generalized inequalities separating and supporting hyperplanes dual
CSCI5254: Convex Optimization & Its Applications Convex Sets subspaces, affine sets, and convex sets operations that preserve convexity generalized inequalities separating and supporting hyperplanes dual
A Derivative-Free Approximate Gradient Sampling Algorithm for Finite Minimax Problems
 1 / 33 A Derivative-Free Approximate Gradient Sampling Algorithm for Finite Minimax Problems Speaker: Julie Nutini Joint work with Warren Hare University of British Columbia (Okanagan) III Latin American
1 / 33 A Derivative-Free Approximate Gradient Sampling Algorithm for Finite Minimax Problems Speaker: Julie Nutini Joint work with Warren Hare University of British Columbia (Okanagan) III Latin American
Characterizing Improving Directions Unconstrained Optimization
 Final Review IE417 In the Beginning... In the beginning, Weierstrass's theorem said that a continuous function achieves a minimum on a compact set. Using this, we showed that for a convex set S and y not
Final Review IE417 In the Beginning... In the beginning, Weierstrass's theorem said that a continuous function achieves a minimum on a compact set. Using this, we showed that for a convex set S and y not
Chapter 4 Convex Optimization Problems
 Chapter 4 Convex Optimization Problems Shupeng Gui Computer Science, UR October 16, 2015 hupeng Gui (Computer Science, UR) Convex Optimization Problems October 16, 2015 1 / 58 Outline 1 Optimization problems
Chapter 4 Convex Optimization Problems Shupeng Gui Computer Science, UR October 16, 2015 hupeng Gui (Computer Science, UR) Convex Optimization Problems October 16, 2015 1 / 58 Outline 1 Optimization problems
Convexity and Optimization
 Convexity and Optimization Richard Lusby DTU Management Engineering Class Exercises From Last Time 2 DTU Management Engineering 42111: Static and Dynamic Optimization (3) 18/09/2017 Today s Material Extrema
Convexity and Optimization Richard Lusby DTU Management Engineering Class Exercises From Last Time 2 DTU Management Engineering 42111: Static and Dynamic Optimization (3) 18/09/2017 Today s Material Extrema
Projection-Based Methods in Optimization
 Projection-Based Methods in Optimization Charles Byrne (Charles Byrne@uml.edu) http://faculty.uml.edu/cbyrne/cbyrne.html Department of Mathematical Sciences University of Massachusetts Lowell Lowell, MA
Projection-Based Methods in Optimization Charles Byrne (Charles Byrne@uml.edu) http://faculty.uml.edu/cbyrne/cbyrne.html Department of Mathematical Sciences University of Massachusetts Lowell Lowell, MA
Lecture: Convex Sets
 /24 Lecture: Convex Sets http://bicmr.pku.edu.cn/~wenzw/opt-27-fall.html Acknowledgement: this slides is based on Prof. Lieven Vandenberghe s lecture notes Introduction 2/24 affine and convex sets some
/24 Lecture: Convex Sets http://bicmr.pku.edu.cn/~wenzw/opt-27-fall.html Acknowledgement: this slides is based on Prof. Lieven Vandenberghe s lecture notes Introduction 2/24 affine and convex sets some
Simplex Algorithm in 1 Slide
 Administrivia 1 Canonical form: Simplex Algorithm in 1 Slide If we do pivot in A r,s >0, where c s
Administrivia 1 Canonical form: Simplex Algorithm in 1 Slide If we do pivot in A r,s >0, where c s
CS675: Convex and Combinatorial Optimization Fall 2014 Convex Functions. Instructor: Shaddin Dughmi
 CS675: Convex and Combinatorial Optimization Fall 2014 Convex Functions Instructor: Shaddin Dughmi Outline 1 Convex Functions 2 Examples of Convex and Concave Functions 3 Convexity-Preserving Operations
CS675: Convex and Combinatorial Optimization Fall 2014 Convex Functions Instructor: Shaddin Dughmi Outline 1 Convex Functions 2 Examples of Convex and Concave Functions 3 Convexity-Preserving Operations
Elementary Topology. Note: This problem list was written primarily by Phil Bowers and John Bryant. It has been edited by a few others along the way.
 Elementary Topology Note: This problem list was written primarily by Phil Bowers and John Bryant. It has been edited by a few others along the way. Definition. properties: (i) T and X T, A topology on
Elementary Topology Note: This problem list was written primarily by Phil Bowers and John Bryant. It has been edited by a few others along the way. Definition. properties: (i) T and X T, A topology on
1.1 Topological spaces. Open and closed sets. Bases. Closure and interior of a set
 December 14, 2012 R. Engelking: General Topology I started to make these notes from [E1] and only later the newer edition [E2] got into my hands. I don t think that there were too much changes in numbering
December 14, 2012 R. Engelking: General Topology I started to make these notes from [E1] and only later the newer edition [E2] got into my hands. I don t think that there were too much changes in numbering
ROUGH MEMBERSHIP FUNCTIONS: A TOOL FOR REASONING WITH UNCERTAINTY
 ALGEBRAIC METHODS IN LOGIC AND IN COMPUTER SCIENCE BANACH CENTER PUBLICATIONS, VOLUME 28 INSTITUTE OF MATHEMATICS POLISH ACADEMY OF SCIENCES WARSZAWA 1993 ROUGH MEMBERSHIP FUNCTIONS: A TOOL FOR REASONING
ALGEBRAIC METHODS IN LOGIC AND IN COMPUTER SCIENCE BANACH CENTER PUBLICATIONS, VOLUME 28 INSTITUTE OF MATHEMATICS POLISH ACADEMY OF SCIENCES WARSZAWA 1993 ROUGH MEMBERSHIP FUNCTIONS: A TOOL FOR REASONING
FUZZY WEAKLY CLOSED SETS
 Chapter 3 FUZZY WEAKLY CLOSED SETS In this chapter, we introduce another type of fuzzy closed set, called fuzzy weakly closed set in an FTS. Alongwith the study of fundamental results of such closed sets,
Chapter 3 FUZZY WEAKLY CLOSED SETS In this chapter, we introduce another type of fuzzy closed set, called fuzzy weakly closed set in an FTS. Alongwith the study of fundamental results of such closed sets,
Division of the Humanities and Social Sciences. Convex Analysis and Economic Theory Winter Separation theorems
 Division of the Humanities and Social Sciences Ec 181 KC Border Convex Analysis and Economic Theory Winter 2018 Topic 8: Separation theorems 8.1 Hyperplanes and half spaces Recall that a hyperplane in
Division of the Humanities and Social Sciences Ec 181 KC Border Convex Analysis and Economic Theory Winter 2018 Topic 8: Separation theorems 8.1 Hyperplanes and half spaces Recall that a hyperplane in
EE/ACM Applications of Convex Optimization in Signal Processing and Communications Lecture 6
 EE/ACM 150 - Applications of Convex Optimization in Signal Processing and Communications Lecture 6 Andre Tkacenko Signal Processing Research Group Jet Propulsion Laboratory April 19, 2012 Andre Tkacenko
EE/ACM 150 - Applications of Convex Optimization in Signal Processing and Communications Lecture 6 Andre Tkacenko Signal Processing Research Group Jet Propulsion Laboratory April 19, 2012 Andre Tkacenko
REVIEW OF FUZZY SETS
 REVIEW OF FUZZY SETS CONNER HANSEN 1. Introduction L. A. Zadeh s paper Fuzzy Sets* [1] introduces the concept of a fuzzy set, provides definitions for various fuzzy set operations, and proves several properties
REVIEW OF FUZZY SETS CONNER HANSEN 1. Introduction L. A. Zadeh s paper Fuzzy Sets* [1] introduces the concept of a fuzzy set, provides definitions for various fuzzy set operations, and proves several properties
Convexity. 1 X i is convex. = b is a hyperplane in R n, and is denoted H(p, b) i.e.,
 i.e.,") Convexity We ll assume throughout, without always saying so, that we re in the finite-dimensional Euclidean vector space R n, although sometimes, for statements that hold in any vector space, we ll say
Convexity We ll assume throughout, without always saying so, that we re in the finite-dimensional Euclidean vector space R n, although sometimes, for statements that hold in any vector space, we ll say
Convex Optimization MLSS 2015
 Convex Optimization MLSS 2015 Constantine Caramanis The University of Texas at Austin The Optimization Problem minimize : f (x) subject to : x X. The Optimization Problem minimize : f (x) subject to :
Convex Optimization MLSS 2015 Constantine Caramanis The University of Texas at Austin The Optimization Problem minimize : f (x) subject to : x X. The Optimization Problem minimize : f (x) subject to :
Lecture 2: August 29, 2018
 10-725/36-725: Convex Optimization Fall 2018 Lecturer: Ryan Tibshirani Lecture 2: August 29, 2018 Scribes: Adam Harley Note: LaTeX template courtesy of UC Berkeley EECS dept. Disclaimer: These notes have
10-725/36-725: Convex Optimization Fall 2018 Lecturer: Ryan Tibshirani Lecture 2: August 29, 2018 Scribes: Adam Harley Note: LaTeX template courtesy of UC Berkeley EECS dept. Disclaimer: These notes have
Mathematical and Algorithmic Foundations Linear Programming and Matchings
 Adavnced Algorithms Lectures Mathematical and Algorithmic Foundations Linear Programming and Matchings Paul G. Spirakis Department of Computer Science University of Patras and Liverpool Paul G. Spirakis
Adavnced Algorithms Lectures Mathematical and Algorithmic Foundations Linear Programming and Matchings Paul G. Spirakis Department of Computer Science University of Patras and Liverpool Paul G. Spirakis
Value function and optimal trajectories for a control problem with supremum cost function and state constraints
 Value function and optimal trajectories for a control problem with supremum cost function and state constraints Hasnaa Zidani ENSTA ParisTech, University of Paris-Saclay joint work with: A. Assellaou,
Value function and optimal trajectories for a control problem with supremum cost function and state constraints Hasnaa Zidani ENSTA ParisTech, University of Paris-Saclay joint work with: A. Assellaou,
LECTURE 7 LECTURE OUTLINE. Review of hyperplane separation Nonvertical hyperplanes Convex conjugate functions Conjugacy theorem Examples
 LECTURE 7 LECTURE OUTLINE Review of hyperplane separation Nonvertical hyperplanes Convex conjugate functions Conjugacy theorem Examples Reading: Section 1.5, 1.6 All figures are courtesy of Athena Scientific,
LECTURE 7 LECTURE OUTLINE Review of hyperplane separation Nonvertical hyperplanes Convex conjugate functions Conjugacy theorem Examples Reading: Section 1.5, 1.6 All figures are courtesy of Athena Scientific,
Convexity I: Sets and Functions
 Convexity I: Sets and Functions Lecturer: Aarti Singh Co-instructor: Pradeep Ravikumar Convex Optimization 10-725/36-725 See supplements for reviews of basic real analysis basic multivariate calculus basic
Convexity I: Sets and Functions Lecturer: Aarti Singh Co-instructor: Pradeep Ravikumar Convex Optimization 10-725/36-725 See supplements for reviews of basic real analysis basic multivariate calculus basic
arxiv: v3 [math.oc] 3 Nov 2016
![arxiv: v3 [math.oc] 3 Nov 2016](/thumbs/81/84411456.jpg "arxiv: v3 [math.oc] 3 Nov 2016") BILEVEL POLYNOMIAL PROGRAMS AND SEMIDEFINITE RELAXATION METHODS arxiv:1508.06985v3 [math.oc] 3 Nov 2016 JIAWANG NIE, LI WANG, AND JANE J. YE Abstract. A bilevel program is an optimization problem whose
BILEVEL POLYNOMIAL PROGRAMS AND SEMIDEFINITE RELAXATION METHODS arxiv:1508.06985v3 [math.oc] 3 Nov 2016 JIAWANG NIE, LI WANG, AND JANE J. YE Abstract. A bilevel program is an optimization problem whose
Nonsmooth Optimization and Related Topics
 Nonsmooth Optimization and Related Topics Edited by F. H. Clarke University of Montreal Montreal, Quebec, Canada V. F. Dem'yanov Leningrad State University Leningrad, USSR I and F. Giannessi University
Nonsmooth Optimization and Related Topics Edited by F. H. Clarke University of Montreal Montreal, Quebec, Canada V. F. Dem'yanov Leningrad State University Leningrad, USSR I and F. Giannessi University
The Set-Open topology
 Volume 37, 2011 Pages 205 217 http://topology.auburn.edu/tp/ The Set-Open topology by A. V. Osipov Electronically published on August 26, 2010 Topology Proceedings Web: http://topology.auburn.edu/tp/ Mail:
Volume 37, 2011 Pages 205 217 http://topology.auburn.edu/tp/ The Set-Open topology by A. V. Osipov Electronically published on August 26, 2010 Topology Proceedings Web: http://topology.auburn.edu/tp/ Mail:
(1) Given the following system of linear equations, which depends on a parameter a R, 3x y + 5z = 2 4x + y + (a 2 14)z = a + 2
 Given the following system of linear equations, which depends on a parameter a R, 3x y + 5z = 2 4x + y + (a 2 14)z = a + 2") (1 Given the following system of linear equations, which depends on a parameter a R, x + 2y 3z = 4 3x y + 5z = 2 4x + y + (a 2 14z = a + 2 (a Classify the system of equations depending on the values of
(1 Given the following system of linear equations, which depends on a parameter a R, x + 2y 3z = 4 3x y + 5z = 2 4x + y + (a 2 14z = a + 2 (a Classify the system of equations depending on the values of
Some Coupled Fixed Point Theorems on Quasi-Partial b-metric Spaces
 International Journal of Mathematical Analysis Vol. 9, 2015, no. 6, 293-306 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/10.12988/ijma.2015.412388 Some Coupled Fixed Point Theorems on Quasi-Partial b-metric
International Journal of Mathematical Analysis Vol. 9, 2015, no. 6, 293-306 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/10.12988/ijma.2015.412388 Some Coupled Fixed Point Theorems on Quasi-Partial b-metric
Section 5 Convex Optimisation 1. W. Dai (IC) EE4.66 Data Proc. Convex Optimisation page 5-1
 EE4.66 Data Proc. Convex Optimisation page 5-1") Section 5 Convex Optimisation 1 W. Dai (IC) EE4.66 Data Proc. Convex Optimisation 1 2018 page 5-1 Convex Combination Denition 5.1 A convex combination is a linear combination of points where all coecients
Section 5 Convex Optimisation 1 W. Dai (IC) EE4.66 Data Proc. Convex Optimisation 1 2018 page 5-1 Convex Combination Denition 5.1 A convex combination is a linear combination of points where all coecients
Finding Euclidean Distance to a Convex Cone Generated by a Large Number of Discrete Points
 Submitted to Operations Research manuscript (Please, provide the manuscript number!) Finding Euclidean Distance to a Convex Cone Generated by a Large Number of Discrete Points Ali Fattahi Anderson School
Submitted to Operations Research manuscript (Please, provide the manuscript number!) Finding Euclidean Distance to a Convex Cone Generated by a Large Number of Discrete Points Ali Fattahi Anderson School
Lecture 6: Faces, Facets
 IE 511: Integer Programming, Spring 2019 31 Jan, 2019 Lecturer: Karthik Chandrasekaran Lecture 6: Faces, Facets Scribe: Setareh Taki Disclaimer: These notes have not been subjected to the usual scrutiny
IE 511: Integer Programming, Spring 2019 31 Jan, 2019 Lecturer: Karthik Chandrasekaran Lecture 6: Faces, Facets Scribe: Setareh Taki Disclaimer: These notes have not been subjected to the usual scrutiny
Existence and uniqueness of the solution for a general system of operator equations in b metric spaces endowed with a graph
 Int. J. Nonlinear Anal. Appl. 8 (217 No. 2, 263-276 ISSN: 28-6822 (electronic http://dx.doi.org/1.2275/ijnaa.217.11562.157 Existence and uniqueness of the solution for a general system of operator equations
Int. J. Nonlinear Anal. Appl. 8 (217 No. 2, 263-276 ISSN: 28-6822 (electronic http://dx.doi.org/1.2275/ijnaa.217.11562.157 Existence and uniqueness of the solution for a general system of operator equations
COMPLETE METRIC ABSOLUTE NEIGHBORHOOD RETRACTS
 COMPLETE METRIC ABSOLUTE NEIGHBORHOOD RETRACTS WIES LAW KUBIŚ Abstract. We characterize complete metric absolute (neighborhood) retracts in terms of existence of certain maps of CW-polytopes. Using our
COMPLETE METRIC ABSOLUTE NEIGHBORHOOD RETRACTS WIES LAW KUBIŚ Abstract. We characterize complete metric absolute (neighborhood) retracts in terms of existence of certain maps of CW-polytopes. Using our
Linear Bilevel Programming With Upper Level Constraints Depending on the Lower Level Solution
 Linear Bilevel Programming With Upper Level Constraints Depending on the Lower Level Solution Ayalew Getachew Mersha and Stephan Dempe October 17, 2005 Abstract Focus in the paper is on the definition
Linear Bilevel Programming With Upper Level Constraints Depending on the Lower Level Solution Ayalew Getachew Mersha and Stephan Dempe October 17, 2005 Abstract Focus in the paper is on the definition
Convergence of Nonconvex Douglas-Rachford Splitting and Nonconvex ADMM
 Convergence of Nonconvex Douglas-Rachford Splitting and Nonconvex ADMM Shuvomoy Das Gupta Thales Canada 56th Allerton Conference on Communication, Control and Computing, 2018 1 What is this talk about?
Convergence of Nonconvex Douglas-Rachford Splitting and Nonconvex ADMM Shuvomoy Das Gupta Thales Canada 56th Allerton Conference on Communication, Control and Computing, 2018 1 What is this talk about?
Lecture Notes 2: The Simplex Algorithm
 Algorithmic Methods 25/10/2010 Lecture Notes 2: The Simplex Algorithm Professor: Yossi Azar Scribe:Kiril Solovey 1 Introduction In this lecture we will present the Simplex algorithm, finish some unresolved
Algorithmic Methods 25/10/2010 Lecture Notes 2: The Simplex Algorithm Professor: Yossi Azar Scribe:Kiril Solovey 1 Introduction In this lecture we will present the Simplex algorithm, finish some unresolved
Master of Science Thesis in Applied Mathematics Siarhei Charnyi
 CENTRAL EUROPEAN UNIVERSITY Department of Mathematics and its Applications Master of Science Thesis in Applied Mathematics Siarhei Charnyi Solving maximin problem by decomposition to smooth and nonsmooth
CENTRAL EUROPEAN UNIVERSITY Department of Mathematics and its Applications Master of Science Thesis in Applied Mathematics Siarhei Charnyi Solving maximin problem by decomposition to smooth and nonsmooth
Sets. De Morgan s laws. Mappings. Definition. Definition
 Sets Let X and Y be two sets. Then the set A set is a collection of elements. Two sets are equal if they contain exactly the same elements. A is a subset of B (A B) if all the elements of A also belong
Sets Let X and Y be two sets. Then the set A set is a collection of elements. Two sets are equal if they contain exactly the same elements. A is a subset of B (A B) if all the elements of A also belong
EFFICIENT SUBGRADIENT METHODS FOR GENERAL CONVEX OPTIMIZATION
 EFFICIENT SUBGRADIENT METHODS FOR GENERAL CONVEX OPTIMIZATION JAMES RENEGAR Abstract. A subgradient method is presented for solving general convex optimization problems, the main requirement being that
EFFICIENT SUBGRADIENT METHODS FOR GENERAL CONVEX OPTIMIZATION JAMES RENEGAR Abstract. A subgradient method is presented for solving general convex optimization problems, the main requirement being that