S7316: Real-Time Robotics Control and Simulation for Deformable Terrain Applications Using the GPU
|
|
|
- Bernice Candace Sherman
- 5 years ago
- Views:
Transcription

1 S7316: Real-Time Robotics Control and Simulation for Deformable Terrain Applications Using the GPU Daniel Melanz Copyright 2017 Energid Technology

2 Overview 1. Who are we? 2. What do we do? 3. How do we do it? 4. How can you do it?
3 Overview 1. Who are we? 2. What do we do? 3. How do we do it? 4. How can you do it?



4 Energid Technologies Energid develops software for simulation and control of any robotic system. Actin software is at the core of our business: Actin SDK Actin Applications Integration Services










5 Energid Technology Development Core Robot Software Development Software Productization Commercial Market Penetration
6 Overview 1. Who are we? 2. What do we do? 3. How do we do it? 4. How can you do it?

7 Actin Software Actin is a powerful constraint/optimization engine.

8 Actin Software Simulation and control software for any robotic system Multi-robot coordination Dynamic collision avoidance Singularity avoidance Kinematically redundant mechanisms Complex kinematic chains Global path planning Real-time dynamic simulation IO and sensor feedback Easy integration of new hardware components Integration with CAD Desktop applications for Windows, Linux, OS X Control on VxWorks, Real-Time Linux and RTOS32 Distributed processing over DDS
9 Overview 1. Who are we? 2. What do we do? 3. How do we do it? System Description Control Theory Simulation (Sensors, Contact, Dynamics) 4. How can you do it?
10 Top-Level Simulation Hierarchy Simulation Dynamic Simulation Vector of Simulators for each Robot Interface or Executive Miscellaneous Visualization Randomization High-Level Control Etc. Stated System Vector of Position Control Systems Control System Vector of Velocity Control Systems System Configuration State
11 Robot Model Manip 0 Manip N Manip 0 State Velocity State Base Joints Base Joints Position State Base Joints Configuration Attachments Collision Exclusion Manip 0 System Environment Manipulator Information Base Ref Link Indexing Link Tree Lin k D a t a : D en av it- H ar ten b er g Mass P r o p er ties A ctu atio n P ar am eter s P h y sical E x ten t S u r f ace P r o p er ties Manip N Base Joints Time Manip N Base Ref Link Indexing Link Tree Lin k D a t a : D en av it- H ar ten b er g Mass P r o p er ties A ctu atio n P ar am eter s P h y sical E x ten t S u r f ace P r o p er ties The model is organized into a constant system, a slow-changing configuration, and a fast-changing state.
 Point positioning (1D, 2D, or 3D) Orientation Pose with one free axis Distance Joint")
12 Generic Motion Control Any number and type of joint. Any number of bifurcations. Open and closed kinematics. Any number and type of constraint: Pose (3D positioning and orienting) Point positioning (1D, 2D, or 3D) Orientation Pose with one free axis Distance Joint positions Linear constraints Center of mass Momentum
 motion q represents the configuration J is the manipulator")
13 Velocity Control Framework Jacobian Equation V J( q) q V represents hand (or other constraint) motion q represents the configuration J is the manipulator Jacobian
14 Solution Method Using a matrix (W), a vector (F), and a scalar (a): where This minimizes F N V W N J q J J T T a 1 F q Wq q T T g a N J J
.")
15 Filtering Scale the joint rates: This allows robust navigation near kinematic and algorithmic singularities (and general positive behavior). F N V W N J V q q J J T T a 1 ), (
.")
16 Control Expression Tree The control system has a tree structure. This allows a flexible description of the control system and supporting parameters (scalar, vector, matrix, and function). It also supports dynamic programming (tabulation of subproblem solutions).
17 Singularity Prevention Practical problems occur when det N J T J W changes sign from one time step to another. When this happens, assumptions regarding the linearized equations are violated. Actin uses N J to detect determinate sign changes and stop the manipulator. Actin can also shift constraints into optimization and use redundancy to singular proximity.
18 Position Control Position control uses velocity control. Position Control Velocity Control Desired Position Manipulator v Trapezoidal, intermediate, or proportional: d k ( p pa ) uˆ d d k a
 k ( F F ) dt) p d m i d m Manipulator This allows the use of kinematic redundancy to achieve")
19 Force Control Optimization Force control uses position control, as position control uses velocity control. Sensors Force Control Position Control Velocity Control V F Desired Force D( k ( F F ) k ( F F ) dt) p d m i d m Manipulator This allows the use of kinematic redundancy to achieve secondary criteria. It also allows position control to be combined with force control.

20 Mobile Kinematics All components of the toolkit apply to both fixed-based an mobile mechanisms. Relative Link End-Effector Link A V e V r V b V e Dynamic Base Frame Base Link End-Effector Link B


21 Mechanism Dynamics Articulation Dynamics: describes internal interaction Body i Body j Body k Impact Dynamics: describes physical contact A B p A p B n f
22 Composite Rigid Body Inertia Mobile-base dynamics equations: CRBI mobile-base simulation algorithm: B A D q q q C q q M q τ b ) ( ), ( ) ( Cost: order(n 3 ) F A I q D b C b T B G q q C q τ F q A M q D q D q I ) ( ) ( ) ( ) ( ) ( b T C b
23 Articulated Body Inertia Link l Link k Link i (Handle) Link j F I A A B Articulated Body Cost: order(n)


24 Contact & Particle Simulation Approach: Use the Discrete Element Method (DEM) Individual particle interactions are modeled Hertz/Hooke Normal Contact Model Full Tangential Displacement History (Coulomb Friction) Elastic/Plastic Rolling Resistance Adhesion/Cohesion Forces Implement particle system interaction with rigid bodies (Manipulators) in Actin
25 Particle Simulation: Normal Contact The contact models currently implemented in Actin follow those of LIGGGHTS: Hookean Contact Model Hertzian Contact Model where 25
26 Simulation Loop Parallel (GPU) Implementation CPU GPU From Actin Allocate gpu memory Update Rigid Body States copy Global memory particle arrays Constant memory - Rigid Body States Integrate particle positions Integration Kernel Create uniform grid and sort Sorting Kernel Process interactions Collision Processing Kernel Reduce Rigid Body Forces and Torques Reduction Kernel Render Particles copy Global memory particle arrays

27 Shapes Demonstration


28 Simulating Interaction over Terrain Simulate terrain in specified zone around a mobile robot as a particle system and transition to/from height field as the robot traverses the terrain A. Define a zone of influence around the robot B. Convert height field into particles C. Simulate particle/rigid body interaction until particles move out of the zone D. Update height field with new surface location based on particle locations A) B) C) D)

29 Simulating Interaction over Terrain

30 Simulating Interaction over Terrain




31 Simulating Interaction over Terrain (Full-Scale Military Vehicles)




32 Sensors Sensor models are implemented using CPU & GPU programming. Multichannel Camera Stereo Laser Scanner

33 Radar Uses size and surface properties to model radar response.

34 Camera Views Shadows can be rendered in camera views

35 LiDAR Sensors Simulate point cloud data Use OpenGL rendered depth buffer to generate a point cloud for each scan in real-time Use texture map warping to simulate non-linear scan projections Parameter space: Gaussian noise in angle and distance Scan rate Motion blur Dropout rate

36 HDR Rendering & Effects Generalized standard (OpenGL) rendering pipeline Added support for full-scene effects High Dynamic Range Rendering, Tone Mapping and Light Bloom implemented as examples


37 Ray Tracing Integration completed with NVIDIA Optix Ray tracing engine Automated conversion of scene graph from OpenSceneGraph to Optix Enables global illumination-based rendering, with emergent effects such as shadow Leverages GPU-based parallelization (using single or multiple cards) 37

38 Ray Tracing Demonstration Ray traced resolution: 10 fps on typical engineering laptop w/quadro K1100M 27 fps on engineering workstation w/tesla K40 38


39 Automated Convoy Studies Convoy Study Configuration GUI was created to configure the studies Currently user can create a default study and then edit: Randomizing optimizer Input Variable Map Output Variable Map Randomizer Optimizer With the convoy editor, the user can configure the convoy by clicking on vehicles With the path editor, the user can view/edit a path. The user can view the study metric results as each evaluation completes
40 Data Distribution Service (DDS) Typical multi-robot deployments One robot controller machine per robot Communication between the controllers Commands State synchronization Sensor feedback Hardware status Single-robot deployments Increasing demand for remote capability DDS is a high-level communication architecture High-level communication is a natural fit for Actin s high-level robotic control High-level communication is ideally fitted to distributed robotic control architectures
 ddscommonplugin ddssimsynchronizationplugin ddssensormanagerplugin ddshardwarecontrolproviderplugin hardwareplugin sub actinrt (Robot N)")
41 Distributed Robotic Control Architecture command primitives (joint frames, end-effector pose, ) pub actinviewer (Control) ddscommonplugin ddssimsynchronizationplugin ddssensormanagerplugin ddshardwarecontrolrequesterguiplugin sub actinrt (Robot 1) ddscommonplugin ddssimsynchronizationplugin ddssensormanagerplugin ddshardwarecontrolproviderplugin hardwareplugin sub actinrt (Robot N) ddscommonplugin ddssimsynchronizationplugin ddssensormanagerplugin ddshardwarecontrolproviderplugin hardwareplugin sub pub sub robot states pub sub


42 Universal Robots Demo Two machines: UR3 and UR10 UR10 machine Publish: UR3 command and UR10 state Subscribe: UR3 state UR3 machine Publish: UR3 state Subscribe: UR3 command and UR10 state

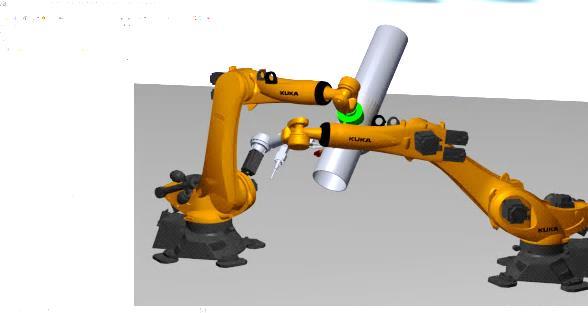
43 Universal Robots Master Slave Demo

44 Universal Robots Collision Avoidance Demo
45 Overview 1. Who are we? 2. What do we do? 3. How do we do it? 4. How can you do it?

46 Flexible Programming System Programs can be saved, restored, edited and archived with ease. Generic programs allow users to future proof their robotic programming investment. Programs are composed of lower level tasks that can be reused. Actin works with any robotic hardware to maximize new designs or reanimate legacy robots. With run-time configurable kinematics, advanced features such as collision avoidance can be added to traditional robots with ease.

47 Flexible Programming System


48 Interface Enables New Control Approaches

49 Summary 1. Energid develops software for simulation and control of any robotic system. 2. The Actin software, a powerful constraint optimization engine, is at the core of our business. 3. Actin uses novel algorithms and the latest hardware for robotic system control and simulation. 4. Actin provides a flexible programming system.
50 We want to work with you! For more information, visit our website: energid.com Daniel Melanz Robotics Research Engineer
Distributed Robotic Architecture
 Distributed Robotic Architecture Using Actin and DDS Justin Keesling Energid Technologies www.energid.com Overview Who is Energid? What is Actin? Actin with DDS Tasking with DDS Projects using DDS Live
Distributed Robotic Architecture Using Actin and DDS Justin Keesling Energid Technologies www.energid.com Overview Who is Energid? What is Actin? Actin with DDS Tasking with DDS Projects using DDS Live
This week. CENG 732 Computer Animation. Warping an Object. Warping an Object. 2D Grid Deformation. Warping an Object.
 CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
John Hsu Nate Koenig ROSCon 2012
 John Hsu Nate Koenig ROSCon 2012 Outline What is Gazebo, and why should you use it Overview and architecture Environment modeling Robot modeling Interfaces Getting Help Simulation for Robots Towards accurate
John Hsu Nate Koenig ROSCon 2012 Outline What is Gazebo, and why should you use it Overview and architecture Environment modeling Robot modeling Interfaces Getting Help Simulation for Robots Towards accurate
A simple example. Assume we want to find the change in the rotation angles to get the end effector to G. Effect of changing s
 CENG 732 Computer Animation This week Inverse Kinematics (continued) Rigid Body Simulation Bodies in free fall Bodies in contact Spring 2006-2007 Week 5 Inverse Kinematics Physically Based Rigid Body Simulation
CENG 732 Computer Animation This week Inverse Kinematics (continued) Rigid Body Simulation Bodies in free fall Bodies in contact Spring 2006-2007 Week 5 Inverse Kinematics Physically Based Rigid Body Simulation
Accelerating Realism with the (NVIDIA Scene Graph)
") Accelerating Realism with the (NVIDIA Scene Graph) Holger Kunz Manager, Workstation Middleware Development Phillip Miller Director, Workstation Middleware Product Management NVIDIA application acceleration
Accelerating Realism with the (NVIDIA Scene Graph) Holger Kunz Manager, Workstation Middleware Development Phillip Miller Director, Workstation Middleware Product Management NVIDIA application acceleration
Modeling the Virtual World
 Modeling the Virtual World Joaquim Madeira November, 2013 RVA - 2013/2014 1 A VR system architecture Modeling the Virtual World Geometry Physics Haptics VR Toolkits RVA - 2013/2014 2 VR object modeling
Modeling the Virtual World Joaquim Madeira November, 2013 RVA - 2013/2014 1 A VR system architecture Modeling the Virtual World Geometry Physics Haptics VR Toolkits RVA - 2013/2014 2 VR object modeling
Table of Contents. Chapter 1. Modeling and Identification of Serial Robots... 1 Wisama KHALIL and Etienne DOMBRE
 Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
Computer Animation. Algorithms and Techniques. z< MORGAN KAUFMANN PUBLISHERS. Rick Parent Ohio State University AN IMPRINT OF ELSEVIER SCIENCE
 Computer Animation Algorithms and Techniques Rick Parent Ohio State University z< MORGAN KAUFMANN PUBLISHERS AN IMPRINT OF ELSEVIER SCIENCE AMSTERDAM BOSTON LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO
Computer Animation Algorithms and Techniques Rick Parent Ohio State University z< MORGAN KAUFMANN PUBLISHERS AN IMPRINT OF ELSEVIER SCIENCE AMSTERDAM BOSTON LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO
Motion Capture & Simulation
 Motion Capture & Simulation Motion Capture Character Reconstructions Joint Angles Need 3 points to compute a rigid body coordinate frame 1 st point gives 3D translation, 2 nd point gives 2 angles, 3 rd
Motion Capture & Simulation Motion Capture Character Reconstructions Joint Angles Need 3 points to compute a rigid body coordinate frame 1 st point gives 3D translation, 2 nd point gives 2 angles, 3 rd
DIGITAL PROXY SIMULATION FOR ROBOTIC HARDWARE
 2014 NDIA GROUND VEHICLE SYSTEMS ENGINEERING AND TECHNOLOGY SYMPOSIUM MODELING &SIMULATION, TESTING AND VALIDATION (MSTV) TECHNICAL SESSION AUGUST 12-14, 2014 NOVI, MICHIGAN DIGITAL PROXY SIMULATION FOR
2014 NDIA GROUND VEHICLE SYSTEMS ENGINEERING AND TECHNOLOGY SYMPOSIUM MODELING &SIMULATION, TESTING AND VALIDATION (MSTV) TECHNICAL SESSION AUGUST 12-14, 2014 NOVI, MICHIGAN DIGITAL PROXY SIMULATION FOR
Particle Systems. Lecture 8 Taku Komura
 Particle Systems Computer Animation and Visualisation Lecture 8 Taku Komura Overview Particle System Modelling fuzzy objects (fire, smoke) Modelling liquid Modelling cloth Integration : implicit integration,
Particle Systems Computer Animation and Visualisation Lecture 8 Taku Komura Overview Particle System Modelling fuzzy objects (fire, smoke) Modelling liquid Modelling cloth Integration : implicit integration,
Cecilia Laschi The BioRobotics Institute Scuola Superiore Sant Anna, Pisa
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
Anatomy of a Physics Engine. Erwin Coumans
 Anatomy of a Physics Engine Erwin Coumans erwin_coumans@playstation.sony.com How it fits together» Terminology» Rigid Body Dynamics» Collision Detection» Software Design Decisions» Trip through the Physics
Anatomy of a Physics Engine Erwin Coumans erwin_coumans@playstation.sony.com How it fits together» Terminology» Rigid Body Dynamics» Collision Detection» Software Design Decisions» Trip through the Physics
AMR 2011/2012: Final Projects
 AMR 2011/2012: Final Projects 0. General Information A final project includes: studying some literature (typically, 1-2 papers) on a specific subject performing some simulations or numerical tests on an
AMR 2011/2012: Final Projects 0. General Information A final project includes: studying some literature (typically, 1-2 papers) on a specific subject performing some simulations or numerical tests on an
Abstract. Introduction. Kevin Todisco
 - Kevin Todisco Figure 1: A large scale example of the simulation. The leftmost image shows the beginning of the test case, and shows how the fluid refracts the environment around it. The middle image
- Kevin Todisco Figure 1: A large scale example of the simulation. The leftmost image shows the beginning of the test case, and shows how the fluid refracts the environment around it. The middle image
Inverse Kinematics. Given a desired position (p) & orientation (R) of the end-effector
 & orientation (R) of the end-effector") Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) Compare the testing methods for testing path segment and finding first
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) Compare the testing methods for testing path segment and finding first
GPU-based Distributed Behavior Models with CUDA
 GPU-based Distributed Behavior Models with CUDA Courtesy: YouTube, ISIS Lab, Universita degli Studi di Salerno Bradly Alicea Introduction Flocking: Reynolds boids algorithm. * models simple local behaviors
GPU-based Distributed Behavior Models with CUDA Courtesy: YouTube, ISIS Lab, Universita degli Studi di Salerno Bradly Alicea Introduction Flocking: Reynolds boids algorithm. * models simple local behaviors
Mobile Manipulator Design
 Mobile Manipulator Design December 10, 2007 Reid Simmons, Sanjiv Singh Robotics Institute Carnegie Mellon University 1. Introduction This report provides a preliminary design for two mobile manipulators
Mobile Manipulator Design December 10, 2007 Reid Simmons, Sanjiv Singh Robotics Institute Carnegie Mellon University 1. Introduction This report provides a preliminary design for two mobile manipulators
NVIDIA DESIGNWORKS Ankit Patel - Prerna Dogra -
 NVIDIA DESIGNWORKS Ankit Patel - ankitp@nvidia.com Prerna Dogra - pdogra@nvidia.com 1 Autonomous Driving Deep Learning Visual Effects Virtual Desktops Visual Computing is our singular mission Gaming Product
NVIDIA DESIGNWORKS Ankit Patel - ankitp@nvidia.com Prerna Dogra - pdogra@nvidia.com 1 Autonomous Driving Deep Learning Visual Effects Virtual Desktops Visual Computing is our singular mission Gaming Product
Live Metric 3D Reconstruction on Mobile Phones ICCV 2013
 Live Metric 3D Reconstruction on Mobile Phones ICCV 2013 Main Contents 1. Target & Related Work 2. Main Features of This System 3. System Overview & Workflow 4. Detail of This System 5. Experiments 6.
Live Metric 3D Reconstruction on Mobile Phones ICCV 2013 Main Contents 1. Target & Related Work 2. Main Features of This System 3. System Overview & Workflow 4. Detail of This System 5. Experiments 6.
Control of Industrial and Mobile Robots
 Control of Industrial and Mobile Robots Prof. Rocco, Bascetta January 29, 2019 name: university ID number: signature: Warnings This file consists of 10 pages (including cover). During the exam you are
Control of Industrial and Mobile Robots Prof. Rocco, Bascetta January 29, 2019 name: university ID number: signature: Warnings This file consists of 10 pages (including cover). During the exam you are
1. Introduction 1 2. Mathematical Representation of Robots
 1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
EE-565-Lab2. Dr. Ahmad Kamal Nasir
 EE-565-Lab2 Introduction to Simulation Environment Dr. Ahmad Kamal Nasir 29.01.2016 Dr. -Ing. Ahmad Kamal Nasir 1 Today s Objectives Introduction to Gazebo Building a robot model in Gazebo Populating robot
EE-565-Lab2 Introduction to Simulation Environment Dr. Ahmad Kamal Nasir 29.01.2016 Dr. -Ing. Ahmad Kamal Nasir 1 Today s Objectives Introduction to Gazebo Building a robot model in Gazebo Populating robot
Rendering. Converting a 3D scene to a 2D image. Camera. Light. Rendering. View Plane
 Rendering Pipeline Rendering Converting a 3D scene to a 2D image Rendering Light Camera 3D Model View Plane Rendering Converting a 3D scene to a 2D image Basic rendering tasks: Modeling: creating the world
Rendering Pipeline Rendering Converting a 3D scene to a 2D image Rendering Light Camera 3D Model View Plane Rendering Converting a 3D scene to a 2D image Basic rendering tasks: Modeling: creating the world
Last Time? Animation, Motion Capture, & Inverse Kinematics. Today. Keyframing. Physically-Based Animation. Procedural Animation
 Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
Shape of Things to Come: Next-Gen Physics Deep Dive
 Shape of Things to Come: Next-Gen Physics Deep Dive Jean Pierre Bordes NVIDIA Corporation Free PhysX on CUDA PhysX by NVIDIA since March 2008 PhysX on CUDA available: August 2008 GPU PhysX in Games Physical
Shape of Things to Come: Next-Gen Physics Deep Dive Jean Pierre Bordes NVIDIA Corporation Free PhysX on CUDA PhysX by NVIDIA since March 2008 PhysX on CUDA available: August 2008 GPU PhysX in Games Physical
Last Time? Inverse Kinematics. Today. Keyframing. Physically-Based Animation. Procedural Animation
 Last Time? Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based Animation Forward and
Last Time? Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based Animation Forward and
animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time
 animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time computer graphics animation 2009 fabio pellacini 2 animation representation many ways to
animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time computer graphics animation 2009 fabio pellacini 2 animation representation many ways to
Fast continuous collision detection among deformable Models using graphics processors CS-525 Presentation Presented by Harish
 Fast continuous collision detection among deformable Models using graphics processors CS-525 Presentation Presented by Harish Abstract: We present an interactive algorithm to perform continuous collision
Fast continuous collision detection among deformable Models using graphics processors CS-525 Presentation Presented by Harish Abstract: We present an interactive algorithm to perform continuous collision
animation computer graphics animation 2009 fabio pellacini 1
 animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time computer graphics animation 2009 fabio pellacini 2 animation representation many ways to
animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time computer graphics animation 2009 fabio pellacini 2 animation representation many ways to
Visual Perception for Robots
 Visual Perception for Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Cognitive Robots Complete systems for example scenarios Equipped with rich sensors Flying robot
Visual Perception for Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Cognitive Robots Complete systems for example scenarios Equipped with rich sensors Flying robot
Input Nodes. Surface Input. Surface Input Nodal Motion Nodal Displacement Instance Generator Light Flocking
 Input Nodes Surface Input Nodal Motion Nodal Displacement Instance Generator Light Flocking The different Input nodes, where they can be found, what their outputs are. Surface Input When editing a surface,
Input Nodes Surface Input Nodal Motion Nodal Displacement Instance Generator Light Flocking The different Input nodes, where they can be found, what their outputs are. Surface Input When editing a surface,
CS451Real-time Rendering Pipeline
 1 CS451Real-time Rendering Pipeline JYH-MING LIEN DEPARTMENT OF COMPUTER SCIENCE GEORGE MASON UNIVERSITY Based on Tomas Akenine-Möller s lecture note You say that you render a 3D 2 scene, but what does
1 CS451Real-time Rendering Pipeline JYH-MING LIEN DEPARTMENT OF COMPUTER SCIENCE GEORGE MASON UNIVERSITY Based on Tomas Akenine-Möller s lecture note You say that you render a 3D 2 scene, but what does
Applications. Human and animal motion Robotics control Hair Plants Molecular motion
 Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
Real-Time Reyes: Programmable Pipelines and Research Challenges. Anjul Patney University of California, Davis
 Real-Time Reyes: Programmable Pipelines and Research Challenges Anjul Patney University of California, Davis Real-Time Reyes-Style Adaptive Surface Subdivision Anjul Patney and John D. Owens SIGGRAPH Asia
Real-Time Reyes: Programmable Pipelines and Research Challenges Anjul Patney University of California, Davis Real-Time Reyes-Style Adaptive Surface Subdivision Anjul Patney and John D. Owens SIGGRAPH Asia
CHAPTER 1 Graphics Systems and Models 3
 ?????? 1 CHAPTER 1 Graphics Systems and Models 3 1.1 Applications of Computer Graphics 4 1.1.1 Display of Information............. 4 1.1.2 Design.................... 5 1.1.3 Simulation and Animation...........
?????? 1 CHAPTER 1 Graphics Systems and Models 3 1.1 Applications of Computer Graphics 4 1.1.1 Display of Information............. 4 1.1.2 Design.................... 5 1.1.3 Simulation and Animation...........
Research Subject. Dynamics Computation and Behavior Capture of Human Figures (Nakamura Group)
") Research Subject Dynamics Computation and Behavior Capture of Human Figures (Nakamura Group) (1) Goal and summary Introduction Humanoid has less actuators than its movable degrees of freedom (DOF) which
Research Subject Dynamics Computation and Behavior Capture of Human Figures (Nakamura Group) (1) Goal and summary Introduction Humanoid has less actuators than its movable degrees of freedom (DOF) which
Lecture 2: Kinesthetic haptic devices: design, kinematics and dynamics
 ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 2: Kinesthetic haptic devices: design, kinematics and dynamics Allison M. Okamura Stanford University kinematics transmission 2 Capstan
ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 2: Kinesthetic haptic devices: design, kinematics and dynamics Allison M. Okamura Stanford University kinematics transmission 2 Capstan
Ray tracing based fast refraction method for an object seen through a cylindrical glass
 20th International Congress on Modelling and Simulation, Adelaide, Australia, 1 6 December 2013 www.mssanz.org.au/modsim2013 Ray tracing based fast refraction method for an object seen through a cylindrical
20th International Congress on Modelling and Simulation, Adelaide, Australia, 1 6 December 2013 www.mssanz.org.au/modsim2013 Ray tracing based fast refraction method for an object seen through a cylindrical
Last Time? Animation, Motion Capture, & Inverse Kinematics. Today. Keyframing. Physically-Based Animation. Procedural Animation
 Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
animation projects in digital art animation 2009 fabio pellacini 1
 animation projects in digital art animation 2009 fabio pellacini 1 animation shape specification as a function of time projects in digital art animation 2009 fabio pellacini 2 how animation works? flip
animation projects in digital art animation 2009 fabio pellacini 1 animation shape specification as a function of time projects in digital art animation 2009 fabio pellacini 2 how animation works? flip
10/25/2018. Robotics and automation. Dr. Ibrahim Al-Naimi. Chapter two. Introduction To Robot Manipulators
 Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
High Level Graphics Programming & VR System Architecture
 High Level Graphics Programming & VR System Architecture Hannes Interactive Media Systems Group (IMS) Institute of Software Technology and Interactive Systems Based on material by Dieter Schmalstieg VR
High Level Graphics Programming & VR System Architecture Hannes Interactive Media Systems Group (IMS) Institute of Software Technology and Interactive Systems Based on material by Dieter Schmalstieg VR
MTRX4700 Experimental Robotics
 MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
MODELING AND HIERARCHY
 MODELING AND HIERARCHY Introduction Models are abstractions of the world both of the real world in which we live and of virtual worlds that we create with computers. We are all familiar with mathematical
MODELING AND HIERARCHY Introduction Models are abstractions of the world both of the real world in which we live and of virtual worlds that we create with computers. We are all familiar with mathematical
APPLICATIONS AND CHALLENGES FOR UNDERWATER SWIMMING MANIPULATORS
 APPLICATIONS AND CHALLENGES FOR UNDERWATER SWIMMING MANIPULATORS Jørgen Sverdrup-Thygeson AMOS Days October 2017 Introduction NEEDS FOR SUBSEA INSPECTION, MAINTENANCE AND REPAIR The number of new subsea
APPLICATIONS AND CHALLENGES FOR UNDERWATER SWIMMING MANIPULATORS Jørgen Sverdrup-Thygeson AMOS Days October 2017 Introduction NEEDS FOR SUBSEA INSPECTION, MAINTENANCE AND REPAIR The number of new subsea
Advanced Computer Graphics CS 563: Making Imperfect Shadow Maps View Adaptive. Frederik Clinck lie
 Advanced Computer Graphics CS 563: Making Imperfect Shadow Maps View Adaptive Frederik Clinckemaillie Computer Science Dept. Worcester Polytechnic Institute (WPI) Background: Virtual Point Lights Simulates
Advanced Computer Graphics CS 563: Making Imperfect Shadow Maps View Adaptive Frederik Clinckemaillie Computer Science Dept. Worcester Polytechnic Institute (WPI) Background: Virtual Point Lights Simulates
Prof. Fanny Ficuciello Robotics for Bioengineering Visual Servoing
 Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Shape modeling Modeling technique Shape representation! 3D Graphics Modeling Techniques
 D Graphics http://chamilo2.grenet.fr/inp/courses/ensimag4mmgd6/ Shape Modeling technique Shape representation! Part : Basic techniques. Projective rendering pipeline 2. Procedural Modeling techniques Shape
D Graphics http://chamilo2.grenet.fr/inp/courses/ensimag4mmgd6/ Shape Modeling technique Shape representation! Part : Basic techniques. Projective rendering pipeline 2. Procedural Modeling techniques Shape
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Control Part 4 Other control strategies These slides are devoted to two advanced control approaches, namely Operational space control Interaction
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Control Part 4 Other control strategies These slides are devoted to two advanced control approaches, namely Operational space control Interaction
Manipulator trajectory planning
 Manipulator trajectory planning Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering Department of Cybernetics Czech Republic http://cmp.felk.cvut.cz/~hlavac Courtesy to
Manipulator trajectory planning Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering Department of Cybernetics Czech Republic http://cmp.felk.cvut.cz/~hlavac Courtesy to
Serial Manipulator Statics. Robotics. Serial Manipulator Statics. Vladimír Smutný
 Serial Manipulator Statics Robotics Serial Manipulator Statics Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
Serial Manipulator Statics Robotics Serial Manipulator Statics Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
Real-time Scalable 6DOF Pose Estimation for Textureless Objects
 Real-time Scalable 6DOF Pose Estimation for Textureless Objects Zhe Cao 1, Yaser Sheikh 1, Natasha Kholgade Banerjee 2 1 Robotics Institute, Carnegie Mellon University, PA, USA 2 Department of Computer
Real-time Scalable 6DOF Pose Estimation for Textureless Objects Zhe Cao 1, Yaser Sheikh 1, Natasha Kholgade Banerjee 2 1 Robotics Institute, Carnegie Mellon University, PA, USA 2 Department of Computer
Chapter 4 Dynamics. Part Constrained Kinematics and Dynamics. Mobile Robotics - Prof Alonzo Kelly, CMU RI
 Chapter 4 Dynamics Part 2 4.3 Constrained Kinematics and Dynamics 1 Outline 4.3 Constrained Kinematics and Dynamics 4.3.1 Constraints of Disallowed Direction 4.3.2 Constraints of Rolling without Slipping
Chapter 4 Dynamics Part 2 4.3 Constrained Kinematics and Dynamics 1 Outline 4.3 Constrained Kinematics and Dynamics 4.3.1 Constraints of Disallowed Direction 4.3.2 Constraints of Rolling without Slipping
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Introduction to GPU hardware and to CUDA
 Introduction to GPU hardware and to CUDA Philip Blakely Laboratory for Scientific Computing, University of Cambridge Philip Blakely (LSC) GPU introduction 1 / 35 Course outline Introduction to GPU hardware
Introduction to GPU hardware and to CUDA Philip Blakely Laboratory for Scientific Computing, University of Cambridge Philip Blakely (LSC) GPU introduction 1 / 35 Course outline Introduction to GPU hardware
Adaptive Point Cloud Rendering
 1 Adaptive Point Cloud Rendering Project Plan Final Group: May13-11 Christopher Jeffers Eric Jensen Joel Rausch Client: Siemens PLM Software Client Contact: Michael Carter Adviser: Simanta Mitra 4/29/13
1 Adaptive Point Cloud Rendering Project Plan Final Group: May13-11 Christopher Jeffers Eric Jensen Joel Rausch Client: Siemens PLM Software Client Contact: Michael Carter Adviser: Simanta Mitra 4/29/13
W4. Perception & Situation Awareness & Decision making
 W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
Scalable multi-gpu cloud raytracing with OpenGL
 Scalable multi-gpu cloud raytracing with OpenGL University of Žilina Digital technologies 2014, Žilina, Slovakia Overview Goals Rendering distant details in visualizations Raytracing Multi-GPU programming
Scalable multi-gpu cloud raytracing with OpenGL University of Žilina Digital technologies 2014, Žilina, Slovakia Overview Goals Rendering distant details in visualizations Raytracing Multi-GPU programming
Mobile Robotics. Mathematics, Models, and Methods. HI Cambridge. Alonzo Kelly. Carnegie Mellon University UNIVERSITY PRESS
 Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
Trajectory Optimization
 Trajectory Optimization Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We heard about RRT*, a sampling-based planning in high-dimensional cost
Trajectory Optimization Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We heard about RRT*, a sampling-based planning in high-dimensional cost
CS GPU and GPGPU Programming Lecture 2: Introduction; GPU Architecture 1. Markus Hadwiger, KAUST
 CS 380 - GPU and GPGPU Programming Lecture 2: Introduction; GPU Architecture 1 Markus Hadwiger, KAUST Reading Assignment #2 (until Feb. 17) Read (required): GLSL book, chapter 4 (The OpenGL Programmable
CS 380 - GPU and GPGPU Programming Lecture 2: Introduction; GPU Architecture 1 Markus Hadwiger, KAUST Reading Assignment #2 (until Feb. 17) Read (required): GLSL book, chapter 4 (The OpenGL Programmable
Advanced Vision Guided Robotics. David Bruce Engineering Manager FANUC America Corporation
 Advanced Vision Guided Robotics David Bruce Engineering Manager FANUC America Corporation Traditional Vision vs. Vision based Robot Guidance Traditional Machine Vision Determine if a product passes or
Advanced Vision Guided Robotics David Bruce Engineering Manager FANUC America Corporation Traditional Vision vs. Vision based Robot Guidance Traditional Machine Vision Determine if a product passes or
Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots
 15-887 Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Two Examples Planning
15-887 Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Two Examples Planning
Robot mechanics and kinematics
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO F ^ k.^
 Computer a jap Animation Algorithms and Techniques Second Edition Rick Parent Ohio State University AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO
Computer a jap Animation Algorithms and Techniques Second Edition Rick Parent Ohio State University AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO
Robot Localization based on Geo-referenced Images and G raphic Methods
 Robot Localization based on Geo-referenced Images and G raphic Methods Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, sidahmed.berrabah@rma.ac.be Janusz Bedkowski, Łukasz Lubasiński,
Robot Localization based on Geo-referenced Images and G raphic Methods Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, sidahmed.berrabah@rma.ac.be Janusz Bedkowski, Łukasz Lubasiński,
Laser sensors. Transmitter. Receiver. Basilio Bona ROBOTICA 03CFIOR
 Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The receiver measures the time of flight (back and
Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The receiver measures the time of flight (back and
GPU Ray Tracing at the Desktop and in the Cloud. Phillip Miller, NVIDIA Ludwig von Reiche, mental images
 GPU Ray Tracing at the Desktop and in the Cloud Phillip Miller, NVIDIA Ludwig von Reiche, mental images Ray Tracing has always had an appeal Ray Tracing Prediction The future of interactive graphics is
GPU Ray Tracing at the Desktop and in the Cloud Phillip Miller, NVIDIA Ludwig von Reiche, mental images Ray Tracing has always had an appeal Ray Tracing Prediction The future of interactive graphics is
Interactive Computer Graphics A TOP-DOWN APPROACH WITH SHADER-BASED OPENGL
 International Edition Interactive Computer Graphics A TOP-DOWN APPROACH WITH SHADER-BASED OPENGL Sixth Edition Edward Angel Dave Shreiner Interactive Computer Graphics: A Top-Down Approach with Shader-Based
International Edition Interactive Computer Graphics A TOP-DOWN APPROACH WITH SHADER-BASED OPENGL Sixth Edition Edward Angel Dave Shreiner Interactive Computer Graphics: A Top-Down Approach with Shader-Based
Robotics. Chapter 25. Chapter 25 1
 Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration of robot
Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration of robot
EE565:Mobile Robotics Lecture 2
 EE565:Mobile Robotics Lecture 2 Welcome Dr. Ing. Ahmad Kamal Nasir Organization Lab Course Lab grading policy (40%) Attendance = 10 % In-Lab tasks = 30 % Lab assignment + viva = 60 % Make a group Either
EE565:Mobile Robotics Lecture 2 Welcome Dr. Ing. Ahmad Kamal Nasir Organization Lab Course Lab grading policy (40%) Attendance = 10 % In-Lab tasks = 30 % Lab assignment + viva = 60 % Make a group Either
CS 775: Advanced Computer Graphics. Lecture 3 : Kinematics
 CS 775: Advanced Computer Graphics Lecture 3 : Kinematics Traditional Cell Animation, hand drawn, 2D Lead Animator for keyframes http://animation.about.com/od/flashanimationtutorials/ss/flash31detanim2.htm
CS 775: Advanced Computer Graphics Lecture 3 : Kinematics Traditional Cell Animation, hand drawn, 2D Lead Animator for keyframes http://animation.about.com/od/flashanimationtutorials/ss/flash31detanim2.htm
Interactive Implicit Modeling with Hierarchical Spatial Caching
 Interactive Implicit Modeling with Hierarchical Spatial Caching Ryan Schmidt 1, Brian Wyvill 1, Eric Galin 2 1 University of Calgary, Canada 2 LIRIS-CNRS, Université Claude Bernard Lyon 1, France Outline
Interactive Implicit Modeling with Hierarchical Spatial Caching Ryan Schmidt 1, Brian Wyvill 1, Eric Galin 2 1 University of Calgary, Canada 2 LIRIS-CNRS, Université Claude Bernard Lyon 1, France Outline
Correcting INS Drift in Terrain Surface Measurements. Heather Chemistruck Ph.D. Student Mechanical Engineering Vehicle Terrain Performance Lab
 Correcting INS Drift in Terrain Surface Measurements Ph.D. Student Mechanical Engineering Vehicle Terrain Performance Lab October 25, 2010 Outline Laboratory Overview Vehicle Terrain Measurement System
Correcting INS Drift in Terrain Surface Measurements Ph.D. Student Mechanical Engineering Vehicle Terrain Performance Lab October 25, 2010 Outline Laboratory Overview Vehicle Terrain Measurement System
Falcon Sensor Image Generator Toolkit
 Sensor Image Generator Toolkit Falcon is the complete set of tools and libraries needed to quickly transform an existing out-the-window (OTW) visual simulation into a correlated, high-fidelity, electro-optical
Sensor Image Generator Toolkit Falcon is the complete set of tools and libraries needed to quickly transform an existing out-the-window (OTW) visual simulation into a correlated, high-fidelity, electro-optical
15-780: Problem Set #4
 15-780: Problem Set #4 April 21, 2014 1. Image convolution [10 pts] In this question you will examine a basic property of discrete image convolution. Recall that convolving an m n image J R m n with a
15-780: Problem Set #4 April 21, 2014 1. Image convolution [10 pts] In this question you will examine a basic property of discrete image convolution. Recall that convolving an m n image J R m n with a
Specialized Acceleration Structures for Ray-Tracing. Warren Hunt
 Specialized Acceleration Structures for Ray-Tracing Warren Hunt Bill Mark Forward: Flavor of Research Build is cheap (especially with scan, lazy and build from hierarchy) Grid build and BVH refit are really
Specialized Acceleration Structures for Ray-Tracing Warren Hunt Bill Mark Forward: Flavor of Research Build is cheap (especially with scan, lazy and build from hierarchy) Grid build and BVH refit are really
Enabling Next-Gen Effects through NVIDIA GameWorks New Features. Shawn Nie, Jack Ran Developer Technology Engineer
 Enabling Next-Gen Effects through NVIDIA GameWorks New Features Shawn Nie, Jack Ran Developer Technology Engineer Overview GPU Rigid Bodies (GRB) FleX Flow WaveWorks UE4-GRB Demo GPU Rigid Bodies in PhysX
Enabling Next-Gen Effects through NVIDIA GameWorks New Features Shawn Nie, Jack Ran Developer Technology Engineer Overview GPU Rigid Bodies (GRB) FleX Flow WaveWorks UE4-GRB Demo GPU Rigid Bodies in PhysX
SceneKit: What s New Session 604
 Graphics and Games #WWDC17 SceneKit: What s New Session 604 Thomas Goossens, SceneKit engineer Amaury Balliet, SceneKit engineer Anatole Duprat, SceneKit engineer Sébastien Métrot, SceneKit engineer 2017
Graphics and Games #WWDC17 SceneKit: What s New Session 604 Thomas Goossens, SceneKit engineer Amaury Balliet, SceneKit engineer Anatole Duprat, SceneKit engineer Sébastien Métrot, SceneKit engineer 2017
Announcements: Quiz. Animation, Motion Capture, & Inverse Kinematics. Last Time? Today: How do we Animate? Keyframing. Procedural Animation
 Announcements: Quiz Animation, Motion Capture, & Inverse Kinematics On Friday (3/1), in class One 8.5x11 sheet of notes allowed Sample quiz (from a previous year) on website Focus on reading comprehension
Announcements: Quiz Animation, Motion Capture, & Inverse Kinematics On Friday (3/1), in class One 8.5x11 sheet of notes allowed Sample quiz (from a previous year) on website Focus on reading comprehension
Mali Demos: Behind the Pixels. Stacy Smith
 Mali Demos: Behind the Pixels Stacy Smith Mali Graphics: Behind the demos Mali Demo Team: Doug Day Stacy Smith (Me) Sylwester Bala Roberto Lopez Mendez PHOTOGRAPH UNAVAILABLE These days I spend more time
Mali Demos: Behind the Pixels Stacy Smith Mali Graphics: Behind the demos Mali Demo Team: Doug Day Stacy Smith (Me) Sylwester Bala Roberto Lopez Mendez PHOTOGRAPH UNAVAILABLE These days I spend more time
Redundancy Resolution by Minimization of Joint Disturbance Torque for Independent Joint Controlled Kinematically Redundant Manipulators
 56 ICASE :The Institute ofcontrol,automation and Systems Engineering,KOREA Vol.,No.1,March,000 Redundancy Resolution by Minimization of Joint Disturbance Torque for Independent Joint Controlled Kinematically
56 ICASE :The Institute ofcontrol,automation and Systems Engineering,KOREA Vol.,No.1,March,000 Redundancy Resolution by Minimization of Joint Disturbance Torque for Independent Joint Controlled Kinematically
CHAPTER 3 MATHEMATICAL MODEL
 38 CHAPTER 3 MATHEMATICAL MODEL 3.1 KINEMATIC MODEL 3.1.1 Introduction The kinematic model of a mobile robot, represented by a set of equations, allows estimation of the robot s evolution on its trajectory,
38 CHAPTER 3 MATHEMATICAL MODEL 3.1 KINEMATIC MODEL 3.1.1 Introduction The kinematic model of a mobile robot, represented by a set of equations, allows estimation of the robot s evolution on its trajectory,
Automatic Control Industrial robotics
 Automatic Control Industrial robotics Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Prof. Luca Bascetta Industrial robots
Automatic Control Industrial robotics Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Prof. Luca Bascetta Industrial robots
Virtual Reality in Assembly Simulation
 Virtual Reality in Assembly Simulation Collision Detection, Simulation Algorithms, and Interaction Techniques Contents 1. Motivation 2. Simulation and description of virtual environments 3. Interaction
Virtual Reality in Assembly Simulation Collision Detection, Simulation Algorithms, and Interaction Techniques Contents 1. Motivation 2. Simulation and description of virtual environments 3. Interaction
Introduction. Optimized Organization and Adaptive Visualization Method. Visualization Experiments and Prototype System Implementation
 CONTENTS Introduction Optimized Organization and Adaptive Visualization Method Visualization Experiments and Prototype System Implementation Conclusions and Future Work Introduction Research Background
CONTENTS Introduction Optimized Organization and Adaptive Visualization Method Visualization Experiments and Prototype System Implementation Conclusions and Future Work Introduction Research Background
10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T
![10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T](/thumbs/79/79288754.jpg "10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T") 3 3 Motion Control (wheeled robots) Introduction: Mobile Robot Kinematics Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground
3 3 Motion Control (wheeled robots) Introduction: Mobile Robot Kinematics Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground
UberFlow: A GPU-Based Particle Engine
 UberFlow: A GPU-Based Particle Engine Peter Kipfer Mark Segal Rüdiger Westermann Technische Universität München ATI Research Technische Universität München Motivation Want to create, modify and render
UberFlow: A GPU-Based Particle Engine Peter Kipfer Mark Segal Rüdiger Westermann Technische Universität München ATI Research Technische Universität München Motivation Want to create, modify and render
Probabilistic Robotics
 Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
Streaming Massive Environments From Zero to 200MPH
 FORZA MOTORSPORT From Zero to 200MPH Chris Tector (Software Architect Turn 10 Studios) Turn 10 Internal studio at Microsoft Game Studios - we make Forza Motorsport Around 70 full time staff 2 Why am I
FORZA MOTORSPORT From Zero to 200MPH Chris Tector (Software Architect Turn 10 Studios) Turn 10 Internal studio at Microsoft Game Studios - we make Forza Motorsport Around 70 full time staff 2 Why am I
ToF Camera for high resolution 3D images with affordable pricing
 ToF Camera for high resolution 3D images with affordable pricing Basler AG Jana Bartels, Product Manager 3D Agenda Coming next I. Basler AG II. 3D Purpose and Time-of-Flight - Working Principle III. Advantages
ToF Camera for high resolution 3D images with affordable pricing Basler AG Jana Bartels, Product Manager 3D Agenda Coming next I. Basler AG II. 3D Purpose and Time-of-Flight - Working Principle III. Advantages
Parallel Robots. Mechanics and Control H AMID D. TAG HI RAD. CRC Press. Taylor & Francis Group. Taylor & Francis Croup, Boca Raton London NewYoric
 Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
Intern Presentation:
 : Gripper Stereo and Assisted Teleoperation Stanford University December 13, 2010 Outline 1. Introduction 2. Hardware 3. Research 4. Packages 5. Conclusion Introduction Hardware Research Packages Conclusion
: Gripper Stereo and Assisted Teleoperation Stanford University December 13, 2010 Outline 1. Introduction 2. Hardware 3. Research 4. Packages 5. Conclusion Introduction Hardware Research Packages Conclusion
COMP 175 COMPUTER GRAPHICS. Lecture 10: Animation. COMP 175: Computer Graphics March 12, Erik Anderson 08 Animation
 Lecture 10: Animation COMP 175: Computer Graphics March 12, 2018 1/37 Recap on Camera and the GL Matrix Stack } Go over the GL Matrix Stack 2/37 Topics in Animation } Physics (dynamics, simulation, mechanics)
Lecture 10: Animation COMP 175: Computer Graphics March 12, 2018 1/37 Recap on Camera and the GL Matrix Stack } Go over the GL Matrix Stack 2/37 Topics in Animation } Physics (dynamics, simulation, mechanics)
Robot Mapping. TORO Gradient Descent for SLAM. Cyrill Stachniss
 Robot Mapping TORO Gradient Descent for SLAM Cyrill Stachniss 1 Stochastic Gradient Descent Minimize the error individually for each constraint (decomposition of the problem into sub-problems) Solve one
Robot Mapping TORO Gradient Descent for SLAM Cyrill Stachniss 1 Stochastic Gradient Descent Minimize the error individually for each constraint (decomposition of the problem into sub-problems) Solve one
UNIVERSITY OF OSLO. Faculty of Mathematics and Natural Sciences
 Page 1 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam in INF3480 Introduction to Robotics Day of exam: May 31 st 2010 Exam hours: 3 hours This examination paper consists of 5 page(s).
Page 1 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam in INF3480 Introduction to Robotics Day of exam: May 31 st 2010 Exam hours: 3 hours This examination paper consists of 5 page(s).
Dense Tracking and Mapping for Autonomous Quadrocopters. Jürgen Sturm
 Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Animation Essentially a question of flipping between many still images, fast enough
 33(70) Information Coding / Computer Graphics, ISY, LiTH Animation Essentially a question of flipping between many still images, fast enough 33(70) Animation as a topic Page flipping, double-buffering
33(70) Information Coding / Computer Graphics, ISY, LiTH Animation Essentially a question of flipping between many still images, fast enough 33(70) Animation as a topic Page flipping, double-buffering