Lecture 16: Object recognition: Part-based generative models
|
|
|
- Colleen Wells
- 5 years ago
- Views:
Transcription
1 Lecture 16: Object recognition: Part-based generative models Professor Stanford Vision Lab 1
2 What we will learn today? Introduction Constellation model Weakly supervised training One-shot learning (Problem Set 4 (Q1)) 2





3 Challenges: intra-class variation 3
4 Usual Challenges: Variability due to: View point Illumination Occlusions 4
5 Representation Basic issues 2D Bag of Words (BoW) models; Part-based models; Multi-view models; Learning Generative & Discriminative BoW models Generative models Probabilistic Hough voting Recognition Classification with BoW Classification with Part-based models 5
6 Representation Basic issues 2D Bag of Words (BoW) models; Part-based models; Multi-view models; Learning Generative & Discriminative BoW models Generative models Probabilistic Hough voting Recognition Classification with BoW Classification with Part-based models 6
7 Representation Basic issues 2D Bag of Words (BoW) models; Part-based models; Multi-view models (Lecture#19); Learning Generative & Discriminative BoW models Generative models Probabilistic Hough voting Recognition Classification with BoW Classification with Part-based models 7
8 Problem with bag-of-words All have equal probability for bag-of-words methods Location information is important 8




9 Model: Parts and Structure 9
10 Parts and Structure Literature Fischler & Elschlager 1973 Yuille 91 Brunelli & Poggio 93 Lades, v.d. Malsburg et al. 93 Cootes, Lanitis, Taylor et al. 95 Amit & Geman 95, 99 et al. Perona 95, 96, 98, 00, 03 Huttenlocher et al. 00 Agarwal & Roth 02 etc 10
11 The Constellation Model T. Leung Representation Shape statistics F&G 95 Affine invariant shape CVPR 98 M. Burl Detection CVPR 96 ECCV 98 M. Weber M. Welling Unsupervised Learning ECCV 00 Multiple views - F&G 00 Discovering categories - CVPR 00 R. Fergus Joint shape & appearance learning Generic feature detectors CVPR 03 Polluted datasets - ECCV 04 L. Fei-Fei One-Shot Learning Incremental learning ICCV 03 CVPR 04 11
12 Deformations A B C D 12


13 Presence / Absence of Features occlusion 13
14 Background clutter 14
15 Foreground model Generative probabilistic model Clutter model Gaussian shape pdf Prob. of detection Uniform shape pdf # detections Assumptions: (a) Clutter independent of foreground detections (b) Clutter detections independent of each other Example 1. Object Part Positions Part Absence 3a. N false detect p Poisson (N 1 λ 1 ) p Poisson (N 2 λ 2 ) p Poisson (N 3 λ 3 ) 3b. Position f. detect N 1 N 2 N 3 15
16 Learning Models `Manually Obtain set of training images Choose parts Label parts by hand, train detectors Learn model from labeled parts 16
17 Recognition 1. Run part detectors exhaustively over image = = e.g h N N N N h K K K K Try different combinations of detections in model - Allow detections to be missing (occlusion) 3. Pick hypothesis which maximizes: 4. If ratio is above threshold then, instance detected ), ( ), ( Hyp Clutter Data p Hyp Object Data p 17
18 So far.. Representation Joint model of part locations Ability to deal with background clutter and occlusions Learning Manual construction of part detectors Estimate parameters of shape density Recognition Run part detectors over image Try combinations of features in model Use efficient search techniques to make fast 18
19 Unsupervised Learning Weber & Welling et. al. 19
20 (Semi) Unsupervised learning Know if image contains object or not But no segmentation of object or manual selection of features 20

21 Unsupervised detector training Highly textured neighborhoods are selected automatically produces patterns per image 21
22 Unsupervised detector training - 2 Pattern Space (100+ dimensions) 22
23 Unsupervised detector training images ~100 detectors 23





24 Learning Take training images. Pick set of detectors. Apply detectors. Task: Estimation of model parameters Chicken and Egg type problem, since we initially know neither: - Model parameters - Assignment of regions to foreground / background Let the assignments be a hidden variable and use EM algorithm to learn them and the model parameters 24
25 ML using EM 1. Current estimate pdf Large P 2. Assign probabilities to constellations... Image 1 Image 2 Image i Small P 3. Use probabilities as weights to re-estimate parameters. Example: µ Large P x + Small P x + = new estimate of µ 25
26 Detector Selection Try out different combinations of detectors (Greedy search) Model 1 Choice 1 Parameter Estimation Choice 2 Parameter Estimation Model 2 Detectors ( 100) Predict / measure model performance (validation set or directly from model) 26



")


27 Frontal Views of Faces 200 Images (100 training, 100 testing) 30 people, different for training and testing 27


28 Pre-selected Parts Learned face model Test Error: 6% (4 Parts) Parts in Model Model Foreground pdf Sample Detection 28

29 Face images 29

30 Background images 30




31 Preselected Parts Car from Rear Test Error: 13% (5 Parts) Parts in Model Model Foreground pdf Sample Detection 31

32 Detections of Cars 32
33 Background Images 33








34 3D Object recognition Multiple mixture components 34
35 3D Orientation Tuning 100 Orientation Tuning % Correct % Correct angle in degrees Frontal Profile 35
36 So far (2).. Representation Multiple mixture components for different viewpoints Learning Now semi-unsupervised Automatic construction and selection of part detectors Estimation of parameters using EM Recognition As before Issues: -Learning is slow (many combinations of detectors) -Appearance learnt first, then shape 36
37 Speed of learning Issues Slow (many combinations of detectors) Appearance learnt first, then shape Difficult to learn part that has stable location but variable appearance Each detector is used as a cross-correlation filter, giving a hard definition of the part s appearance Would like a fully probabilistic representation of the object 37
38 Object categorization Fergus et. al. CVPR 03, IJCV 06 38

 coords.")
 Normalize 11x11 patch")

39 Detection & Representation of regions Find regions within image Use salient region operator (Kadir & Brady 01) Location (x,y) coords. of region centre Scale Appearance Radius of region (pixels) Normalize 11x11 patch Projection onto PCA basis Gives representation of appearance in low-dimensional vector space 39 c 1 c 2.. c 15


40 Kadir & Brady saliency region detector Motorbikes example 40
41 Generative probabilistic model (2) Foreground model Gaussian shape pdf Gaussian part appearance pdf based on Burl, Weber et al. [ECCV 98, 00] Gaussian relative scale pdf log(scale) Prob. of detection Clutter model Uniform shape pdf Gaussian background appearance pdf Uniform relative scale pdf log(scale) Poission pdf on # detections 41

42 Motorbikes Samples from appearance model 42

43 Recognized Motorbikes 43

44 Background images evaluated with motorbike model 44


45 Frontal faces 45


46 Airplanes 46

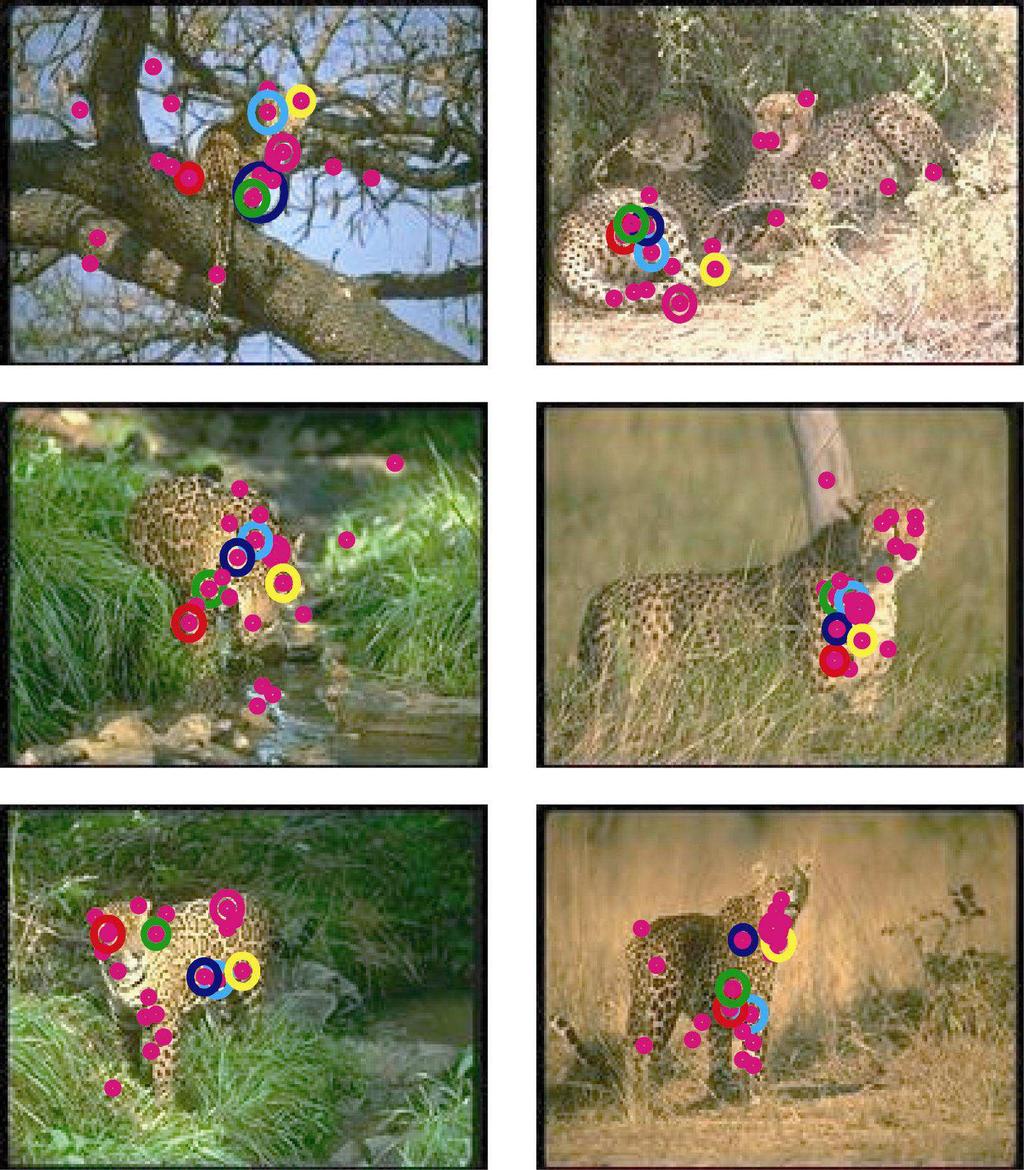
47 Spotted cats 47
48 Summary of results Dataset Fixed scale experiment Scale invariant experiment Motorbikes Faces Airplanes Cars (Rear) Spotted cats % equal error rate Note: Within each series, same settings used for all datasets 48
49 Comparison to other methods Dataset Ours Others Motorbikes Weber et al. [ECCV 00] Faces Weber Airplanes Weber Cars (Side) Agarwal Roth [ECCV 02] % equal error rate 49
50 Why this design? Generic features seem to well in finding consistent parts of the object Some categories perform badly different feature types needed Why PCA representation? Tried ICA, FLD, Oriented filter responses etc. But PCA worked best Fully probabilistic representation lets us use tools from machine learning community 50
51 S. Savarese,

52 52 P. Buegel, 1562
53 One-Shot learning Fei-Fei et. al. ICCV 03, PAMI 06 53
54 Algorithm Training Examples Categories Burl, et al. Weber, et al. Fergus, et al. 200 ~ 400 Faces, Motorbikes, Spotted cats, Airplanes, Cars Viola et al. ~10,000 Faces Schneiderman, et al. ~2,000 Faces, Cars Rowley et al. ~500 Faces 54
55 Number of training examples Generalisation performance 6 part Motorbike model Test Train Classification error (%) Previously log 2 (Training images) 55
56 How do we do better than what statisticians have told us? Intuition 1: use Prior information Intuition 2: make best use of training information 56




57 Prior knowledge: means Appearance Shape 57
58 Bayesian framework P(object test, train) vs. P(clutter test, train) Bayes Rule p( test object, train ) p(object ) Expansion by parametrization p(test θ,object) p( θ object, train) dθ 58
59 Bayesian framework P(object test, train) vs. P(clutter test, train) Bayes Rule p( test object, train ) p(object ) Expansion by parametrization p(test θ,object) p( θ object, train) dθ Previous Work: ( ML ) δ θ 59
60 Bayesian framework P(object test, train) vs. P(clutter test, train) Bayes Rule p( test object, train ) p(object ) Expansion by parametrization p(test θ,object) p( θ object, train) dθ One-Shot learning: p ( train θ, object ) p ( θ ) 60
61 model (θ) space Model Structure Each object model θ Gaussian shape pdf Gaussian part appearance pdf θ 1 θ n θ 2 61
 conjugate distribution of p(train")
62 model (θ) space Model Structure Each object model θ Gaussian shape pdf Gaussian part appearance pdf θ 1 θ n θ 2 model distribution: p(θ) conjugate distribution of p(train θ,object) 62
63 p Learning Model Distribution ( ) ( ) θ object, train p train θ, object p( θ ) use Prior information Bayesian learning marginalize over theta Variational EM (Attias, Hinton, Minka, etc.) 63

 prior")
64 Variational EM Random initialization new θ s E-Step M-Step new estimate of p(θ train) prior knowledge of p(θ) 64





65 Experiments Training: 1-6 randomly drawn images Testing: 50 fg/ 50 bg images object present/absent Datasets faces airplanes spotted cats motorbikes 65




















66 Faces Motorbikes Airplanes Spotted cats 66



67 Experiments: obtaining priors airplanes model (θ) space spotted cats faces motorbikes 67



68 Experiments: obtaining priors airplanes model (θ) space faces spotted cats motorbikes 68






69 Number of training examples 69






70 Number of training examples 70





71 Number of training examples 71






72 Number of training examples 72
73 Algorithm Training Examples Categories Results(e rror) Burl, et al. Weber, et al. Fergus, et al. 200 ~ 400 Faces, Motorbikes, Spotted cats, Airplanes, Cars % Viola et al. ~10,000 Faces 7-21% Schneiderman, et al. ~2,000 Faces, Cars % Rowley et al. ~500 Faces % Bayesian One-Shot 1 ~ 5 Faces, Motorbikes, Spotted cats, Airplanes 8 15 % 73
74 What we have learned today? Introduction Constellation model Weakly supervised training One-shot learning (Problem Set 4 (Q1)) 74
Lecture 15: Object recognition: Bag of Words models & Part based generative models
 Lecture 15: Object recognition: Bag of Words models & Part based generative models Professor Fei Fei Li Stanford Vision Lab 1 Basic issues Representation How to represent an object category; which classification
Lecture 15: Object recognition: Bag of Words models & Part based generative models Professor Fei Fei Li Stanford Vision Lab 1 Basic issues Representation How to represent an object category; which classification
Part-based models. Lecture 10
 Part-based models Lecture 10 Overview Representation Location Appearance Generative interpretation Learning Distance transforms Other approaches using parts Felzenszwalb, Girshick, McAllester, Ramanan
Part-based models Lecture 10 Overview Representation Location Appearance Generative interpretation Learning Distance transforms Other approaches using parts Felzenszwalb, Girshick, McAllester, Ramanan
Object Class Recognition by Unsupervised Scale-Invariant Learning
 Object Class Recognition by Unsupervised Scale-Invariant Learning R. Fergus P. Perona 2 A. Zisserman Dept. of Engineering Science 2 Dept. of Electrical Engineering University of Oxford California Institute
Object Class Recognition by Unsupervised Scale-Invariant Learning R. Fergus P. Perona 2 A. Zisserman Dept. of Engineering Science 2 Dept. of Electrical Engineering University of Oxford California Institute
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 20 Object Recognition 3 Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 20 Object Recognition 3 Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 20 Object Recognition 3 Mani Golparvar-Fard Department of Civil and Environmental Engineering Department of Computer Science 3129D,
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 20 Object Recognition 3 Mani Golparvar-Fard Department of Civil and Environmental Engineering Department of Computer Science 3129D,
Part based models for recognition. Kristen Grauman
 Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Semi-supervised learning and recognition of object classes
 Semi-supervised learning and recognition of object classes R. Fergus, 2 P. Perona, and A. Zisserman Dept. of Engineering Science University of Oxford Parks Road, Oxford OX 3PJ, U.K. 2 Dept. of Electrical
Semi-supervised learning and recognition of object classes R. Fergus, 2 P. Perona, and A. Zisserman Dept. of Engineering Science University of Oxford Parks Road, Oxford OX 3PJ, U.K. 2 Dept. of Electrical
Selection of Scale-Invariant Parts for Object Class Recognition
 Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Previously. Part-based and local feature models for generic object recognition. Bag-of-words model 4/20/2011
 Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Object recognition (part 1)
") Recognition Object recognition (part 1) CSE P 576 Larry Zitnick (larryz@microsoft.com) The Margaret Thatcher Illusion, by Peter Thompson Readings Szeliski Chapter 14 Recognition What do we mean by object
Recognition Object recognition (part 1) CSE P 576 Larry Zitnick (larryz@microsoft.com) The Margaret Thatcher Illusion, by Peter Thompson Readings Szeliski Chapter 14 Recognition What do we mean by object
Generic Object Recognition with Probabilistic Models and Weak Supervision
 Generic Object Recognition with Probabilistic Models and Weak Supervision Yatharth Saraf Department of Computer Science and Engineering University of California, San Diego ysaraf@cs.ucsd.edu Abstract Real
Generic Object Recognition with Probabilistic Models and Weak Supervision Yatharth Saraf Department of Computer Science and Engineering University of California, San Diego ysaraf@cs.ucsd.edu Abstract Real
Part-Based Models for Object Class Recognition Part 2
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
Part-Based Models for Object Class Recognition Part 2
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
EECS 442 Computer vision. Object Recognition
 EECS 442 Computer vision Object Recognition Intro Recognition of 3D objects Recognition of object categories: Bag of world models Part based models 3D object categorization Challenges: intraclass variation
EECS 442 Computer vision Object Recognition Intro Recognition of 3D objects Recognition of object categories: Bag of world models Part based models 3D object categorization Challenges: intraclass variation
Beyond bags of features: Adding spatial information. Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba
 Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Part-based and local feature models for generic object recognition
 Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
High Level Computer Vision
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de http://www.d2.mpi-inf.mpg.de/cv Please Note No
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de http://www.d2.mpi-inf.mpg.de/cv Please Note No
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 18 Object Recognition I Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 18 Object Recognition I Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
Efficient Unsupervised Learning for Localization and Detection in Object Categories
 Efficient Unsupervised Learning for Localization and Detection in Object ategories Nicolas Loeff, Himanshu Arora EE Department University of Illinois at Urbana-hampaign {loeff,harora1}@uiuc.edu Alexander
Efficient Unsupervised Learning for Localization and Detection in Object ategories Nicolas Loeff, Himanshu Arora EE Department University of Illinois at Urbana-hampaign {loeff,harora1}@uiuc.edu Alexander
Fusing shape and appearance information for object category detection
 1 Fusing shape and appearance information for object category detection Andreas Opelt, Axel Pinz Graz University of Technology, Austria Andrew Zisserman Dept. of Engineering Science, University of Oxford,
1 Fusing shape and appearance information for object category detection Andreas Opelt, Axel Pinz Graz University of Technology, Austria Andrew Zisserman Dept. of Engineering Science, University of Oxford,
Video Google faces. Josef Sivic, Mark Everingham, Andrew Zisserman. Visual Geometry Group University of Oxford
 Video Google faces Josef Sivic, Mark Everingham, Andrew Zisserman Visual Geometry Group University of Oxford The objective Retrieve all shots in a video, e.g. a feature length film, containing a particular
Video Google faces Josef Sivic, Mark Everingham, Andrew Zisserman Visual Geometry Group University of Oxford The objective Retrieve all shots in a video, e.g. a feature length film, containing a particular
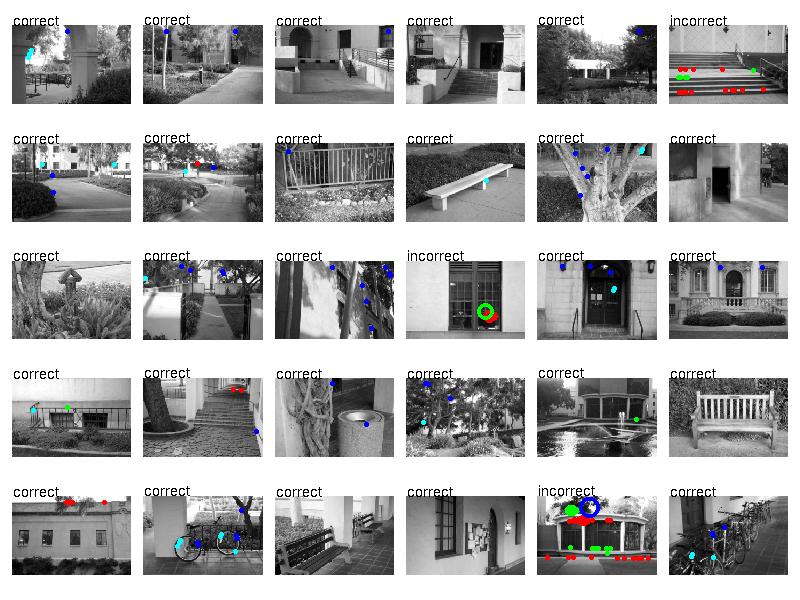
Evaluation and comparison of interest points/regions
 Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Unsupervised Learning of Models for Recognition
 Unsupervised Learning of Models for Recognition M. Weber M. Welling P. Perona Dept. of Computation and Neural Systems Dept. of Electrical Engineering California Institute of Technology MC 136 93, Pasadena,
Unsupervised Learning of Models for Recognition M. Weber M. Welling P. Perona Dept. of Computation and Neural Systems Dept. of Electrical Engineering California Institute of Technology MC 136 93, Pasadena,
Local Features based Object Categories and Object Instances Recognition
 Local Features based Object Categories and Object Instances Recognition Eric Nowak Ph.D. thesis defense 17th of March, 2008 1 Thesis in Computer Vision Computer vision is the science and technology of
Local Features based Object Categories and Object Instances Recognition Eric Nowak Ph.D. thesis defense 17th of March, 2008 1 Thesis in Computer Vision Computer vision is the science and technology of
Visual Object Recognition
 Visual Object Recognition -67777 Instructor: Daphna Weinshall, daphna@cs.huji.ac.il Office: Ross 211 Office hours: Sunday 12:00-13:00 1 Sources Recognizing and Learning Object Categories ICCV 2005 short
Visual Object Recognition -67777 Instructor: Daphna Weinshall, daphna@cs.huji.ac.il Office: Ross 211 Office hours: Sunday 12:00-13:00 1 Sources Recognizing and Learning Object Categories ICCV 2005 short
Latent Variable Models and Expectation Maximization
 Latent Variable Models and Expectation Maximization Oliver Schulte - CMPT 726 Bishop PRML Ch. 9 2 4 6 8 1 12 14 16 18 2 4 6 8 1 12 14 16 18 5 1 15 2 25 5 1 15 2 25 2 4 6 8 1 12 14 2 4 6 8 1 12 14 5 1 15
Latent Variable Models and Expectation Maximization Oliver Schulte - CMPT 726 Bishop PRML Ch. 9 2 4 6 8 1 12 14 16 18 2 4 6 8 1 12 14 16 18 5 1 15 2 25 5 1 15 2 25 2 4 6 8 1 12 14 2 4 6 8 1 12 14 5 1 15
Unsupervised Learning of Models for Recognition
 Unsupervised Learning of Models for Recognition ½ M. Weber ½ M. Welling ¾ P. Perona ½¾ Dept. of Computation and Neural Systems ¾ Dept. of Electrical Engineering California Institute of Technology MC 136
Unsupervised Learning of Models for Recognition ½ M. Weber ½ M. Welling ¾ P. Perona ½¾ Dept. of Computation and Neural Systems ¾ Dept. of Electrical Engineering California Institute of Technology MC 136
Overview of section. Lecture 10 Discriminative models. Discriminative methods. Discriminative vs. generative. Discriminative methods.
 Overview of section Lecture 0 Discriminative models Object detection with classifiers Boosting Gentle boosting Object model Object detection Nearest-Neighbor methods Multiclass object detection Context
Overview of section Lecture 0 Discriminative models Object detection with classifiers Boosting Gentle boosting Object model Object detection Nearest-Neighbor methods Multiclass object detection Context
Selection of Scale-Invariant Parts for Object Class Recognition
 Selection of Scale-Invariant Parts for Object Class Recognition Gyuri Dorkó, Cordelia Schmid To cite this version: Gyuri Dorkó, Cordelia Schmid. Selection of Scale-Invariant Parts for Object Class Recognition.
Selection of Scale-Invariant Parts for Object Class Recognition Gyuri Dorkó, Cordelia Schmid To cite this version: Gyuri Dorkó, Cordelia Schmid. Selection of Scale-Invariant Parts for Object Class Recognition.
Course Administration
 Course Administration Project 2 results are online Project 3 is out today The first quiz is a week from today (don t panic!) Covers all material up to the quiz Emphasizes lecture material NOT project topics
Course Administration Project 2 results are online Project 3 is out today The first quiz is a week from today (don t panic!) Covers all material up to the quiz Emphasizes lecture material NOT project topics
Improving Recognition through Object Sub-categorization
 Improving Recognition through Object Sub-categorization Al Mansur and Yoshinori Kuno Graduate School of Science and Engineering, Saitama University, 255 Shimo-Okubo, Sakura-ku, Saitama-shi, Saitama 338-8570,
Improving Recognition through Object Sub-categorization Al Mansur and Yoshinori Kuno Graduate School of Science and Engineering, Saitama University, 255 Shimo-Okubo, Sakura-ku, Saitama-shi, Saitama 338-8570,
Supervised learning. y = f(x) function
 function") Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Detection III: Analyzing and Debugging Detection Methods
 CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
Object Class Recognition by Boosting a Part-Based Model
 In Proc. IEEE Conf. on Computer Vision & Pattern Recognition (CVPR), San-Diego CA, June 2005 Object Class Recognition by Boosting a Part-Based Model Aharon Bar-Hillel, Tomer Hertz and Daphna Weinshall
In Proc. IEEE Conf. on Computer Vision & Pattern Recognition (CVPR), San-Diego CA, June 2005 Object Class Recognition by Boosting a Part-Based Model Aharon Bar-Hillel, Tomer Hertz and Daphna Weinshall
What do we mean by recognition?
 Announcements Recognition Project 3 due today Project 4 out today (help session + photos end-of-class) The Margaret Thatcher Illusion, by Peter Thompson Readings Szeliski, Chapter 14 1 Recognition What
Announcements Recognition Project 3 due today Project 4 out today (help session + photos end-of-class) The Margaret Thatcher Illusion, by Peter Thompson Readings Szeliski, Chapter 14 1 Recognition What
TA Section: Problem Set 4
 TA Section: Problem Set 4 Outline Discriminative vs. Generative Classifiers Image representation and recognition models Bag of Words Model Part-based Model Constellation Model Pictorial Structures Model
TA Section: Problem Set 4 Outline Discriminative vs. Generative Classifiers Image representation and recognition models Bag of Words Model Part-based Model Constellation Model Pictorial Structures Model
A Sparse Object Category Model for Efficient Learning and Complete Recognition
 A Sparse Object Category Model for Efficient Learning and Complete Recognition Rob Fergus 1, Pietro Perona 2, and Andrew Zisserman 1 1 Dept. of Engineering Science University of Oxford Parks Road, Oxford
A Sparse Object Category Model for Efficient Learning and Complete Recognition Rob Fergus 1, Pietro Perona 2, and Andrew Zisserman 1 1 Dept. of Engineering Science University of Oxford Parks Road, Oxford
Object and Class Recognition I:
 Object and Class Recognition I: Object Recognition Lectures 10 Sources ICCV 2005 short courses Li Fei-Fei (UIUC), Rob Fergus (Oxford-MIT), Antonio Torralba (MIT) http://people.csail.mit.edu/torralba/iccv2005
Object and Class Recognition I: Object Recognition Lectures 10 Sources ICCV 2005 short courses Li Fei-Fei (UIUC), Rob Fergus (Oxford-MIT), Antonio Torralba (MIT) http://people.csail.mit.edu/torralba/iccv2005
Object Category Detection: Sliding Windows
 04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
Object Recognition. Computer Vision. Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce
 Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2013 TTh 17:30-18:45 FDH 204 Lecture 18 130404 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Object Recognition Intro (Chapter 14) Slides from
EE795: Computer Vision and Intelligent Systems Spring 2013 TTh 17:30-18:45 FDH 204 Lecture 18 130404 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Object Recognition Intro (Chapter 14) Slides from
Verification: is that a lamp? What do we mean by recognition? Recognition. Recognition
 Recognition Recognition The Margaret Thatcher Illusion, by Peter Thompson The Margaret Thatcher Illusion, by Peter Thompson Readings C. Bishop, Neural Networks for Pattern Recognition, Oxford University
Recognition Recognition The Margaret Thatcher Illusion, by Peter Thompson The Margaret Thatcher Illusion, by Peter Thompson Readings C. Bishop, Neural Networks for Pattern Recognition, Oxford University
Discriminative Patch Selection using Combinatorial and Statistical Models for Patch-Based Object Recognition
 Discriminative Patch Selection using Combinatorial and Statistical Models for Patch-Based Object Recognition Akshay Vashist 1, Zhipeng Zhao 1, Ahmed Elgammal 1, Ilya Muchnik 1,2, Casimir Kulikowski 1 1
Discriminative Patch Selection using Combinatorial and Statistical Models for Patch-Based Object Recognition Akshay Vashist 1, Zhipeng Zhao 1, Ahmed Elgammal 1, Ilya Muchnik 1,2, Casimir Kulikowski 1 1
Methods for Representing and Recognizing 3D objects
 Methods for Representing and Recognizing 3D objects part 1 Silvio Savarese University of Michigan at Ann Arbor Object: Building, 45º pose, 8-10 meters away Object: Person, back; 1-2 meters away Object:
Methods for Representing and Recognizing 3D objects part 1 Silvio Savarese University of Michigan at Ann Arbor Object: Building, 45º pose, 8-10 meters away Object: Person, back; 1-2 meters away Object:
Recognition problems. Face Recognition and Detection. Readings. What is recognition?
 Face Recognition and Detection Recognition problems The Margaret Thatcher Illusion, by Peter Thompson Computer Vision CSE576, Spring 2008 Richard Szeliski CSE 576, Spring 2008 Face Recognition and Detection
Face Recognition and Detection Recognition problems The Margaret Thatcher Illusion, by Peter Thompson Computer Vision CSE576, Spring 2008 Richard Szeliski CSE 576, Spring 2008 Face Recognition and Detection
Supervised learning. y = f(x) function
 function") Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Category-level localization
 Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi
 Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi hrazvi@stanford.edu 1 Introduction: We present a method for discovering visual hierarchy in a set of images. Automatically grouping
Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi hrazvi@stanford.edu 1 Introduction: We present a method for discovering visual hierarchy in a set of images. Automatically grouping
Object Recognition via Local Patch Labelling
 Object Recognition via Local Patch Labelling Christopher M. Bishop 1 and Ilkay Ulusoy 2 1 Microsoft Research, 7 J J Thompson Avenue, Cambridge, U.K. http://research.microsoft.com/ cmbishop 2 METU, Computer
Object Recognition via Local Patch Labelling Christopher M. Bishop 1 and Ilkay Ulusoy 2 1 Microsoft Research, 7 J J Thompson Avenue, Cambridge, U.K. http://research.microsoft.com/ cmbishop 2 METU, Computer
Combined Object Categorization and Segmentation with an Implicit Shape Model
 in ECCV 04 Workshop on Statistical Learning in Computer Vision, Prague, May 2004. Combined Object Categorization and Segmentation with an Implicit Shape Model Bastian Leibe 1, Ales Leonardis 2, and Bernt
in ECCV 04 Workshop on Statistical Learning in Computer Vision, Prague, May 2004. Combined Object Categorization and Segmentation with an Implicit Shape Model Bastian Leibe 1, Ales Leonardis 2, and Bernt
Part-Based Models for Object Class Recognition Part 3
 High Level Computer Vision! Part-Based Models for Object Class Recognition Part 3 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de! http://www.d2.mpi-inf.mpg.de/cv ! State-of-the-Art
High Level Computer Vision! Part-Based Models for Object Class Recognition Part 3 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de! http://www.d2.mpi-inf.mpg.de/cv ! State-of-the-Art
Day 3 Lecture 1. Unsupervised Learning
 Day 3 Lecture 1 Unsupervised Learning Semi-supervised and transfer learning Myth: you can t do deep learning unless you have a million labelled examples for your problem. Reality You can learn useful representations
Day 3 Lecture 1 Unsupervised Learning Semi-supervised and transfer learning Myth: you can t do deep learning unless you have a million labelled examples for your problem. Reality You can learn useful representations
Last week. Multi-Frame Structure from Motion: Multi-View Stereo. Unknown camera viewpoints
 Last week Multi-Frame Structure from Motion: Multi-View Stereo Unknown camera viewpoints Last week PCA Today Recognition Today Recognition Recognition problems What is it? Object detection Who is it? Recognizing
Last week Multi-Frame Structure from Motion: Multi-View Stereo Unknown camera viewpoints Last week PCA Today Recognition Today Recognition Recognition problems What is it? Object detection Who is it? Recognizing
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Window based detectors
 Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
3D Probabilistic Feature Point Model for Object Detection and Recognition
 3D Probabilistic Feature Point Model for Object Detection and Recognition Sami Romdhani Thomas Vetter University of Basel, Computer Science Department, Bernoullistrasse 16, CH - 4056 Basel, Switzerland
3D Probabilistic Feature Point Model for Object Detection and Recognition Sami Romdhani Thomas Vetter University of Basel, Computer Science Department, Bernoullistrasse 16, CH - 4056 Basel, Switzerland
Determining Patch Saliency Using Low-Level Context
 Determining Patch Saliency Using Low-Level Context Devi Parikh 1, C. Lawrence Zitnick 2, and Tsuhan Chen 1 1 Carnegie Mellon University, Pittsburgh, PA, USA 2 Microsoft Research, Redmond, WA, USA Abstract.
Determining Patch Saliency Using Low-Level Context Devi Parikh 1, C. Lawrence Zitnick 2, and Tsuhan Chen 1 1 Carnegie Mellon University, Pittsburgh, PA, USA 2 Microsoft Research, Redmond, WA, USA Abstract.
A New Class of Learnable Detectors for Categorisation
 CENTER FOR MACHINE PERCEPTION CZECH TECHNICAL UNIVERSITY A New Class of Learnable Detectors for Categorisation Jiří Matas, Karel Zimmermann zimmerk@cmp.felk.cvut.cz REPRINT Jiří Matas, Karel Zimmermann
CENTER FOR MACHINE PERCEPTION CZECH TECHNICAL UNIVERSITY A New Class of Learnable Detectors for Categorisation Jiří Matas, Karel Zimmermann zimmerk@cmp.felk.cvut.cz REPRINT Jiří Matas, Karel Zimmermann
Effect of Salient Features in Object Recognition
 Effect of Salient Features in Object Recognition Kashif Ahmad University of Engineering & Technology, Peshawar, Pakistan Nasir Ahmad University of Engineering & Technology, Peshawar, Pakistan Muhammad
Effect of Salient Features in Object Recognition Kashif Ahmad University of Engineering & Technology, Peshawar, Pakistan Nasir Ahmad University of Engineering & Technology, Peshawar, Pakistan Muhammad
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Det De e t cting abnormal event n s Jaechul Kim
 Detecting abnormal events Jaechul Kim Purpose Introduce general methodologies used in abnormality detection Deal with technical details of selected papers Abnormal events Easy to verify, but hard to describe
Detecting abnormal events Jaechul Kim Purpose Introduce general methodologies used in abnormality detection Deal with technical details of selected papers Abnormal events Easy to verify, but hard to describe
Frequent Inner-Class Approach: A Semi-supervised Learning Technique for One-shot Learning
 Frequent Inner-Class Approach: A Semi-supervised Learning Technique for One-shot Learning Izumi Suzuki, Koich Yamada, Muneyuki Unehara Nagaoka University of Technology, 1603-1, Kamitomioka Nagaoka, Niigata
Frequent Inner-Class Approach: A Semi-supervised Learning Technique for One-shot Learning Izumi Suzuki, Koich Yamada, Muneyuki Unehara Nagaoka University of Technology, 1603-1, Kamitomioka Nagaoka, Niigata
Statistical Shape Models for Object Recognition and Part Localization
 Statistical Shape Models for Object Recognition and Part Localization Yan Li Yanghai Tsin Yakup Genc Takeo Kanade 1 ECE Department Real-time Vision and Modeling Carnegie Mellon University {yanli,tk}@cs.cmu.edu
Statistical Shape Models for Object Recognition and Part Localization Yan Li Yanghai Tsin Yakup Genc Takeo Kanade 1 ECE Department Real-time Vision and Modeling Carnegie Mellon University {yanli,tk}@cs.cmu.edu
Analysis: TextonBoost and Semantic Texton Forests. Daniel Munoz Februrary 9, 2009
 Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Oriented Filters for Object Recognition: an empirical study
 Oriented Filters for Object Recognition: an empirical study Jerry Jun Yokono Tomaso Poggio Center for Biological and Computational Learning, M.I.T. E5-0, 45 Carleton St., Cambridge, MA 04, USA Sony Corporation,
Oriented Filters for Object Recognition: an empirical study Jerry Jun Yokono Tomaso Poggio Center for Biological and Computational Learning, M.I.T. E5-0, 45 Carleton St., Cambridge, MA 04, USA Sony Corporation,
Learning Human Motion Models from Unsegmented Videos
 In IEEE International Conference on Pattern Recognition (CVPR), pages 1-7, Alaska, June 2008. Learning Human Motion Models from Unsegmented Videos Roman Filipovych Eraldo Ribeiro Computer Vision and Bio-Inspired
In IEEE International Conference on Pattern Recognition (CVPR), pages 1-7, Alaska, June 2008. Learning Human Motion Models from Unsegmented Videos Roman Filipovych Eraldo Ribeiro Computer Vision and Bio-Inspired
Visual Object Recognition
 Perceptual and Sensory Augmented Computing Visual Object Recognition Tutorial Visual Object Recognition Bastian Leibe Computer Vision Laboratory ETH Zurich Chicago, 14.07.2008 & Kristen Grauman Department
Perceptual and Sensory Augmented Computing Visual Object Recognition Tutorial Visual Object Recognition Bastian Leibe Computer Vision Laboratory ETH Zurich Chicago, 14.07.2008 & Kristen Grauman Department
Lecture 8 Fitting and Matching
 Lecture 8 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi-model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Lecture 8 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi-model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 17 130402 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Background Subtraction Stauffer and Grimson
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 17 130402 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Background Subtraction Stauffer and Grimson
Virtual Training for Multi-View Object Class Recognition
 Virtual Training for Multi-View Object Class Recognition Han-Pang Chiu Leslie Pack Kaelbling Tomás Lozano-Pérez MIT Computer Science and Artificial Intelligence Laboratory Cambridge, MA 02139, USA {chiu,lpk,tlp}@csail.mit.edu
Virtual Training for Multi-View Object Class Recognition Han-Pang Chiu Leslie Pack Kaelbling Tomás Lozano-Pérez MIT Computer Science and Artificial Intelligence Laboratory Cambridge, MA 02139, USA {chiu,lpk,tlp}@csail.mit.edu
Today. Introduction to recognition Alignment based approaches 11/4/2008
 Today Introduction to recognition Alignment based approaches Tuesday, Nov 4 Brief recap of visual words Introduction to recognition problem Recognition by alignment, pose clustering Kristen Grauman UT
Today Introduction to recognition Alignment based approaches Tuesday, Nov 4 Brief recap of visual words Introduction to recognition problem Recognition by alignment, pose clustering Kristen Grauman UT
Preliminary Local Feature Selection by Support Vector Machine for Bag of Features
 Preliminary Local Feature Selection by Support Vector Machine for Bag of Features Tetsu Matsukawa Koji Suzuki Takio Kurita :University of Tsukuba :National Institute of Advanced Industrial Science and
Preliminary Local Feature Selection by Support Vector Machine for Bag of Features Tetsu Matsukawa Koji Suzuki Takio Kurita :University of Tsukuba :National Institute of Advanced Industrial Science and
Basic Problem Addressed. The Approach I: Training. Main Idea. The Approach II: Testing. Why a set of vocabularies?
 Visual Categorization With Bags of Keypoints. ECCV,. G. Csurka, C. Bray, C. Dance, and L. Fan. Shilpa Gulati //7 Basic Problem Addressed Find a method for Generic Visual Categorization Visual Categorization:
Visual Categorization With Bags of Keypoints. ECCV,. G. Csurka, C. Bray, C. Dance, and L. Fan. Shilpa Gulati //7 Basic Problem Addressed Find a method for Generic Visual Categorization Visual Categorization:
Generic Object Recognition with Strangeness and Boosting
 Generic Object Recognition with Strangeness and Boosting Ph.D Proposal Fayin Li Advisors: Dr. Jana Košecká and Harry Wechsler Department of Computer Science George Mason University 1. Introduction People
Generic Object Recognition with Strangeness and Boosting Ph.D Proposal Fayin Li Advisors: Dr. Jana Košecká and Harry Wechsler Department of Computer Science George Mason University 1. Introduction People
Effective Classifiers for Detecting Objects
 Effective Classifiers for Detecting Objects Michael Mayo Dept. of Computer Science University of Waikato Private Bag 3105, Hamilton, New Zealand mmayo@cs.waikato.ac.nz Abstract Several state-of-the-art
Effective Classifiers for Detecting Objects Michael Mayo Dept. of Computer Science University of Waikato Private Bag 3105, Hamilton, New Zealand mmayo@cs.waikato.ac.nz Abstract Several state-of-the-art
Modern Object Detection. Most slides from Ali Farhadi
 Modern Object Detection Most slides from Ali Farhadi Comparison of Classifiers assuming x in {0 1} Learning Objective Training Inference Naïve Bayes maximize j i logp + logp ( x y ; θ ) ( y ; θ ) i ij
Modern Object Detection Most slides from Ali Farhadi Comparison of Classifiers assuming x in {0 1} Learning Objective Training Inference Naïve Bayes maximize j i logp + logp ( x y ; θ ) ( y ; θ ) i ij
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Recognition by Probabilistic Hypothesis Construction
 Recognition by Probabilistic Hypothesis Construction Pierre Moreels 1, Michael Maire 1, and Pietro Perona 1 1 California Institute of Technology, Pasadena CA 91125, USA pmoreels@vision.caltech.edu, mmaire@vision.caltech.edu,
Recognition by Probabilistic Hypothesis Construction Pierre Moreels 1, Michael Maire 1, and Pietro Perona 1 1 California Institute of Technology, Pasadena CA 91125, USA pmoreels@vision.caltech.edu, mmaire@vision.caltech.edu,
Lecture 15 Visual recognition
 Lecture 15 Visual recognition 3D object detection Introduction Single instance 3D object detectors Generic 3D object detectors Silvio Savarese Lecture 15-26-Feb-14 3D object detection Object: Building
Lecture 15 Visual recognition 3D object detection Introduction Single instance 3D object detectors Generic 3D object detectors Silvio Savarese Lecture 15-26-Feb-14 3D object detection Object: Building
Feature Descriptors. CS 510 Lecture #21 April 29 th, 2013
 Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Learning an Alphabet of Shape and Appearance for Multi-Class Object Detection
 Learning an Alphabet of Shape and Appearance for Multi-Class Object Detection Andreas Opelt, Axel Pinz and Andrew Zisserman 09-June-2009 Irshad Ali (Department of CS, AIT) 09-June-2009 1 / 20 Object class
Learning an Alphabet of Shape and Appearance for Multi-Class Object Detection Andreas Opelt, Axel Pinz and Andrew Zisserman 09-June-2009 Irshad Ali (Department of CS, AIT) 09-June-2009 1 / 20 Object class
A Boundary-Fragment-Model for Object Detection
 A Boundary-Fragment-Model for Object Detection Andreas Opelt 1,AxelPinz 1, and Andrew Zisserman 2 1 Vision-based Measurement Group, Inst. of El. Measurement and Meas. Sign. Proc. Graz, University of Technology,
A Boundary-Fragment-Model for Object Detection Andreas Opelt 1,AxelPinz 1, and Andrew Zisserman 2 1 Vision-based Measurement Group, Inst. of El. Measurement and Meas. Sign. Proc. Graz, University of Technology,
Object Category Detection: Sliding Windows
 03/18/10 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Goal: Detect all instances of objects Influential Works in Detection Sung-Poggio
03/18/10 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Goal: Detect all instances of objects Influential Works in Detection Sung-Poggio
OBJECT CATEGORIZATION
 OBJECT CATEGORIZATION Ing. Lorenzo Seidenari e-mail: seidenari@dsi.unifi.it Slides: Ing. Lamberto Ballan November 18th, 2009 What is an Object? Merriam-Webster Definition: Something material that may be
OBJECT CATEGORIZATION Ing. Lorenzo Seidenari e-mail: seidenari@dsi.unifi.it Slides: Ing. Lamberto Ballan November 18th, 2009 What is an Object? Merriam-Webster Definition: Something material that may be
Face detection in a video sequence - a temporal approach
 Face detection in a video sequence - a temporal approach K. Mikolajczyk R. Choudhury C. Schmid INRIA Rhône-Alpes GRAVIR-CNRS, 655 av. de l Europe, 38330 Montbonnot, France {Krystian.Mikolajczyk,Ragini.Choudhury,Cordelia.Schmid}@inrialpes.fr
Face detection in a video sequence - a temporal approach K. Mikolajczyk R. Choudhury C. Schmid INRIA Rhône-Alpes GRAVIR-CNRS, 655 av. de l Europe, 38330 Montbonnot, France {Krystian.Mikolajczyk,Ragini.Choudhury,Cordelia.Schmid}@inrialpes.fr
Pattern recognition (3)
") Pattern recognition (3) 1 Things we have discussed until now Statistical pattern recognition Building simple classifiers Supervised classification Minimum distance classifier Bayesian classifier Building
Pattern recognition (3) 1 Things we have discussed until now Statistical pattern recognition Building simple classifiers Supervised classification Minimum distance classifier Bayesian classifier Building
Learning Object Categories from Google s Image Search
 Learning Object Categories from Google s Image Search R. Fergus L. Fei-Fei P. Perona A. Zisserman Dept. of Engineering Science Dept. of Electrical Engineering University of Oxford California Institute
Learning Object Categories from Google s Image Search R. Fergus L. Fei-Fei P. Perona A. Zisserman Dept. of Engineering Science Dept. of Electrical Engineering University of Oxford California Institute
Face detection and recognition. Detection Recognition Sally
 Face detection and recognition Detection Recognition Sally Face detection & recognition Viola & Jones detector Available in open CV Face recognition Eigenfaces for face recognition Metric learning identification
Face detection and recognition Detection Recognition Sally Face detection & recognition Viola & Jones detector Available in open CV Face recognition Eigenfaces for face recognition Metric learning identification
Visual Motion Analysis and Tracking Part II
 Visual Motion Analysis and Tracking Part II David J Fleet and Allan D Jepson CIAR NCAP Summer School July 12-16, 16, 2005 Outline Optical Flow and Tracking: Optical flow estimation (robust, iterative refinement,
Visual Motion Analysis and Tracking Part II David J Fleet and Allan D Jepson CIAR NCAP Summer School July 12-16, 16, 2005 Outline Optical Flow and Tracking: Optical flow estimation (robust, iterative refinement,
Lecture 18: Human Motion Recognition
 Lecture 18: Human Motion Recognition Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Introduction Motion classification using template matching Motion classification i using spatio
Lecture 18: Human Motion Recognition Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Introduction Motion classification using template matching Motion classification i using spatio
Object Recognition Using Wavelet Based Salient Points
 14 The Open Signal Processing Journal, 2009, 2, 14-20 Object Recognition Using Wavelet Based Salient Points Open Access S. Arivazhagan and R. Newlin Shebiah* Department of Electronics and Communication
14 The Open Signal Processing Journal, 2009, 2, 14-20 Object Recognition Using Wavelet Based Salient Points Open Access S. Arivazhagan and R. Newlin Shebiah* Department of Electronics and Communication
An Evaluation of Volumetric Interest Points
 An Evaluation of Volumetric Interest Points Tsz-Ho YU Oliver WOODFORD Roberto CIPOLLA Machine Intelligence Lab Department of Engineering, University of Cambridge About this project We conducted the first
An Evaluation of Volumetric Interest Points Tsz-Ho YU Oliver WOODFORD Roberto CIPOLLA Machine Intelligence Lab Department of Engineering, University of Cambridge About this project We conducted the first
Object Category Detection. Slides mostly from Derek Hoiem
 Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Efficient Kernels for Identifying Unbounded-Order Spatial Features
 Efficient Kernels for Identifying Unbounded-Order Spatial Features Yimeng Zhang Carnegie Mellon University yimengz@andrew.cmu.edu Tsuhan Chen Cornell University tsuhan@ece.cornell.edu Abstract Higher order
Efficient Kernels for Identifying Unbounded-Order Spatial Features Yimeng Zhang Carnegie Mellon University yimengz@andrew.cmu.edu Tsuhan Chen Cornell University tsuhan@ece.cornell.edu Abstract Higher order
EECS 442 Computer vision. Fitting methods
 EECS 442 Computer vision Fitting methods - Problem formulation - Least square methods - RANSAC - Hough transforms - Multi-model fitting - Fitting helps matching! Reading: [HZ] Chapters: 4, 11 [FP] Chapters:
EECS 442 Computer vision Fitting methods - Problem formulation - Least square methods - RANSAC - Hough transforms - Multi-model fitting - Fitting helps matching! Reading: [HZ] Chapters: 4, 11 [FP] Chapters:
Beyond Bags of features Spatial information & Shape models
 Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Incremental Learning of Object Detectors Using a Visual Shape Alphabet
 Incremental Learning of Object Detectors Using a Visual Shape Alphabet A. Opelt, A. Pinz & A. Zisserman CVPR 06 Presented by Medha Bhargava* * Several slides adapted from authors presentation, CVPR 06
Incremental Learning of Object Detectors Using a Visual Shape Alphabet A. Opelt, A. Pinz & A. Zisserman CVPR 06 Presented by Medha Bhargava* * Several slides adapted from authors presentation, CVPR 06
Lecture 9 Fitting and Matching
 Lecture 9 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi- model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Lecture 9 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi- model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Patch Descriptors. EE/CSE 576 Linda Shapiro
 Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar