EECS 442 Computer vision. Object Recognition
|
|
|
- Camron Rose
- 6 years ago
- Views:
Transcription

1 EECS 442 Computer vision Object Recognition Intro Recognition of 3D objects Recognition of object categories: Bag of world models Part based models 3D object categorization





2 Challenges: intraclass variation
3 Usual Challenges: Variability due to: View point Illumination Occlusions
4 Representation Basic properties 2D Bag of Words (BoW) models; 2D Star/ISM models; Multiview models; Learning Generative & Discriminative BoW models Probabilistic Hough voting Generative multiview models Recognition Classification with BoW Detection via Hough voting
5 Representation Basic properties 2D Bag of Words (BoW) models; 2D Star/ISM models; Multiview models; Learning Generative & Discriminative BoW models Probabilistic Hough voting Generative multiview models Recognition Classification with BoW Detection via Hough voting



6 definition of BoW Independent features histogram representation codewords dictionary







7 learning Representation recognition feature detection & representation codewords dictionary image representation category models (and/or) classifiers category decision
8 Learning and Recognition 1. Discriminative method: NN SVM 2.Generative method: graphical models category models (and/or) classifiers

9 Discriminative classifiers category models Model space Class 1 Class N





10 Discriminative models Nearest neighbor Neural networks 10 6 examples Shakhnarovich, Viola, Darrell 2003 Berg, Berg, Malik LeCun, Bottou, Bengio, Haffner 1998 Rowley, Baluja, Kanade 1998 Support Vector Machines Latent SVM Structural SVM Boosting Guyon, Vapnik, Heisele, Serre, Poggio Felzenszwalb 00 Ramanan 03 Viola, Jones 2001, Torralba et al. 2004, Opelt et al. 2006, Courtesy of Vittorio Ferrari Slide credit: Kristen Grauman Slide adapted from Antonio Torralba
11 Support vector machines Find hyperplane that maximizes the margin between the positive and negative examples Support vectors: x i w b 1 x w b Distance between point i and hyperplane: w Margin = 2 / w Solution: w y x i i i i Support vectors Credit slide: S. Lazebnik Margin Classification function (decision boundary): w x b y x x i i i i b
12 Support vector machines Classification w x b y x x i i i i b Test point if x w b 0 class 1 if x w b 0 class 2 C. Burges, A Tutorial on Support Vector Machines for Pattern Recognition, Data Mining and Knowledge Discovery, 1998
13 Datasets that are linearly separable work out great: Nonlinear SVMs 0 x But what if the dataset is just too hard? 0 x We can map it to a higherdimensional space: x 2 0 x Slide credit: Andrew Moore
14 Nonlinear SVMs General idea: the original input space can always be mapped to some higherdimensional feature space where the training set is separable: Φ: x φ(x) lifting transformation Slide credit: Andrew Moore
15 Overfitting A simple dataset. Two models Linear Nonlinear
16 Overfitting Let s get more data. Simple model has better generalization.
17 Overfitting As complexity increases, the model overfits the data Training loss decreases Real loss increases We need to penalize model complexity = to regularize Loss Model complexity Real loss Training loss
18 Learning and Recognition 1. Discriminative method: NN SVM 2.Generative method: graphical models category models (and/or) classifiers
19 Generative models 1. Naïve Bayes classifier Csurka Bray, Dance & Fan, Hierarchical Bayesian text models (plsa and LDA) Background: Hoffman 2001, Blei, Ng & Jordan, 2004 Object categorization: Sivic et al. 2005, Sudderth et al Natural scene categorization: FeiFei et al. 2005
20 Object categorization: the statistical viewpoint Discriminative methods model posterior Generative methods model likelihood and prior Bayes rule: p( zebra image) p( no zebra image) p( image zebra) p( image no zebra) p( zebra) p( no zebra) posterior ratio likelihood ratio prior ratio
21 Some notations w: a collection of all N codewords in the image w = [w1,w2,,wn] c: category of the image
22 the Naïve Bayes model p(c w) ~ p(c)p(w c) p( c) p( w1,, w c) N Prior prob. of the object classes Image likelihood given the class c w N
23 the Naïve Bayes model p (c w) ~ p(c)p(w c) p( c) p( w1,, w c) Prior prob. of the object classes Image likelihood given the class p( c) N N n 1 p( w n c) Likelihood of n th visual word given the class Assume that each feature (codewords) is conditionally independent given the class p(w, 1,w N c) N i 1 p(w c) i
24 the Naïve Bayes model p (c w) ~ p(c)p(w c) p( c) p( w1,, w c) Prior prob. of the object classes Image likelihood given the class p( c) N N n 1 p( w n c) Likelihood of n th visual word given the class
25 Classification/Recognition c arg max c p( c w) p( c) N n 1 p( w n c) Object class decision p( wi c1 ) How do we learn P(w i c j )? From empirical frequencies of code words in images from a given class p( wi c2)

26 Csurka et al. 2004
27 E = 28% E = 15%
28 Summary: Generative models Naïve Bayes Unigram models in document analysis Assumes conditional independence of words given class Parameter estimation: frequency counting
29 Other generative BoW models Hierarchical Bayesian topic models (e.g. plsa and LDA) Object categorization: Sivic et al. 2005, Sudderth et al Natural scene categorization: FeiFei et al. 2005
30 Generative vs discriminative Discriminative methods Computationally efficient & fast Generative models Convenient for weakly or unsupervised, incremental training Prior information Flexibility in modeling parameters





31 Weakness of BoW the models No rigorous geometric information of the object components It s intuitive to most of us that objects are made of parts no such information Not extensively tested yet for View point invariance Scale invariance Segmentation and localization unclear
32 EECS 442 Computer vision Object Recognition Intro Recognition of 3D objects Recognition of object categories: Bag of world models Part based models 3D object categorization
33 Representation Basic properties 2D Bag of Words (BoW) models; 2D Star/ISM models; Multiview models; Learning Generative & Discriminative BoW models Probabilistic Hough voting Generative multiview models Recognition Classification with BoW Detection via Hough voting
34 Problem with bagofwords All have equal probability for bagofwords methods Location information is important
35 Part Based Representation Object as set of parts Model: Relative locations between parts Appearance of part Figure from [Fischler & Elschlager 73]
36 History of Parts and Structure approaches Fischler & Elschlager 1973 Yuille 91 Brunelli & Poggio 93 Lades, v.d. Malsburg et al. 93 Cootes, Lanitis, Taylor et al. 95 Amit & Geman 95, 99 Perona et al. 95, 96, 98, 00, 03, 04, 05 Ullman et al. 02 Felzenszwalb & Huttenlocher 00, 04 Crandall & Huttenlocher 05, 06 Leibe & Schiele 03, 04 Many papers since 2000
37 Deformations A B C D



38 Presence / Absence of Features occlusion
39 Background clutter
40 Sparse representation Computationally tractable (10 5 pixels parts) But throw away potentially useful image information

41 Discriminative Parts need to be distinctive to separate from other classes
42 Hierarchical representations Pixels Pixel groupings Parts Object Images from [Amit98,Bouchard05]
43 Different connectivity structures Fergus et al. 03 FeiFei et al. 03 Crandall et al. 05 Leibe 05; Felzenszwalb 09 O(N 6 ) O(N 2 ) O(N 3 ) Crandall et al. 05 Felzenszwalb & Huttenlocher 00 O(N 2 ) Csurka 04 Vasconcelos 00 Bouchard & Triggs 05 Carneiro & Lowe 06 from Sparse Flexible Models of Local Features Gustavo Carneiro and David Lowe, ECCV 2006
44 Stochastic Grammar of Images S.C. Zhu et al. and D. Mumford
 e.g. animals, trees, rocks e.g. contours, intermediate objects e.")

45 Context and Hierarchy in a Probabilistic Image Model Jin & Geman (2006) e.g. animals, trees, rocks e.g. contours, intermediate objects e.g. linelets, curvelets, T junctions e.g. discontinuities, gradient animal head instantiated by tiger head animal head instantiated by bear head
46 Different connectivity structures Fergus et al. 03 FeiFei et al. 03 Crandall et al. 05 Leibe 05; Felzenszwalb 09 O(N 6 ) O(N 2 ) O(N 3 ) Crandall et al. 05 Felzenszwalb & Huttenlocher 00 O(N 2 ) Csurka 04 Vasconcelos 00 Bouchard & Triggs 05 Carneiro & Lowe 06 from Sparse Flexible Models of Local Features Gustavo Carneiro and David Lowe, ECCV 2006

47 Star models by Latent SVM Felzenszwalb, McAllester, Ramanan, 08 Source code:

48 Star models by Latent SVM Search strategy: Sliding Windows Simple but large computational complexity (x,y, S,, N of classes)
49 Implicit shape models by generalized Hough voting B. Leibe, A. Leonardis, and B. Schiele, Combined Object Categorization and Segmentation with an Implicit Shape Model, ECCV Workshop on Statistical Learning in Computer Vision 2004
50 Basic properties Representation How to represent an object category; which classification scheme? Learning How to learn the classifier, given training data Recognition How the classifier is to be used on novel data
51 Object representation: Constellation of parts w.r.t object centroid B. Leibe, A. Leonardis, and B. Schiele, Combined Object Categorization and Segmentation with an Implicit Shape Model, ECCV Workshop on Statistical Learning in Computer Vision 2004

52 Object representation: How to capture constellation of parts? Using Hough Voting B. Leibe, A. Leonardis, and B. Schiele, Combined Object Categorization and Segmentation with an Implicit Shape Model, ECCV Workshop on Statistical Learning in Computer Vision 2004
53 Basic properties Representation How to represent an object category; which classification scheme? Learning How to learn the classifier, given training data Recognition How the classifier is to be used on novel data



54 Hough Transform Formulation Parts in query image vote for a learnt model Significant aggregations of votes correspond to models Complexity : # parts * # votes Significantly lower than brute force search (e.g., sliding window detectors) Popular for detecting parameterized shapes Hough 59, Duda&Hart 72, Ballard 81, Slide Modified from S. Maji
55 Hough transform P.V.C. Hough, Machine Analysis of Bubble Chamber Pictures, Proc. Int. Conf. High Energy Accelerators and Instrumentation, 1959 Given a set of points, find the curve or line that explains the data points best y x
56 Hough transform P.V.C. Hough, Machine Analysis of Bubble Chamber Pictures, Proc. Int. Conf. High Energy Accelerators and Instrumentation, 1959 Given a set of points, find the curve or line that explains the data points best y (x 1, y 1 ) m y 1 = m x 1 + n x y = m x + n Hough space n
57 Hough transform P.V.C. Hough, Machine Analysis of Bubble Chamber Pictures, Proc. Int. Conf. High Energy Accelerators and Instrumentation, 1959 Issue : parameter space [m,n] is unbounded Use a polar representation for the parameter space y x xcos ysin Hough space

58 Hough transform experiments features votes

59 Hough transform experiments Noisy data features votes IDEA: introduce a grid a count intersection points in each cell Issue: Grid size needs to be adjusted

60 Hough transform experiments features votes Issue: spurious peaks due to uniform noise
61 Hough transform conclusions Good: All points are processed independently, so can cope with occlusion/outliers Some robustness to noise: noise points unlikely to contribute consistently to any single bin Bad: Spurious peaks due to uniform noise Tradeoff noisegrid size (hard to find sweet point)

62 Hough transform experiments Courtesy of TKK Automation Technology Laboratory

63 Credit slide: C. Grauman

64 Generalized Hough transform What if want to detect arbitrary shapes defined by boundary points and a reference point? [Dana H. Ballard, Generalizing the Hough Transform to Detect Arbitrary Shapes, 1980] Credit slide: C. Grauman
65 Generalized Hough transform To detect the model shape in a new image: For each edge point Index into table with its gradient orientation θ Use retrieved r vectors to vote for position of reference point Peak in this Hough space is reference point with most supporting edges Assuming translation is the only transformation here, i.e., orientation and scale are fixed. Credit slide: C. Grauman
66 Example Query Circle model rx ry P1 = 0 R = [rx,ry] = [1,0] C1 = P1 + R P2 = 45 R = [rx,ry] = [.7,.7] C2 = P2 + R Pk = 180 R = [rx,ry] = [1, 0] Ck = Pk + R
67 Implicit shape models Instead of indexing displacements by gradient orientation, index by visual codeword Visual codebook is used to index votes for object position [center] and scale CW rx ry B. Leibe, A. Leonardis, and B. Schiele, Combined Object Categorization and Segmentation with an Implicit Shape Model, ECCV Workshop on Statistical Learning in Computer Vision 2004
68 Implicit shape models Instead of indexing displacements by gradient orientation, index by visual codeword Visual codebook is used to index votes for object position [center] and scale CW rx ry ?? 1 3 B. Leibe, A. Leonardis, and B. Schiele, Combined Object Categorization and Segmentation with an Implicit Shape Model, ECCV Workshop on Statistical Learning in Computer Vision 2004
![Implicit shape models Instead of indexing displacements by gradient orientation, index by visual codeword Visual codebook is used to index votes for object position [center] and scale CW rx ry 1 0.9.](/docs-images/74/71294500/images/69-0.jpg "1 3 1 0 1 3 N 0.7 0.7 B. Leibe, A. Leonardis, and B.")
69 Implicit shape models Instead of indexing displacements by gradient orientation, index by visual codeword Visual codebook is used to index votes for object position [center] and scale CW rx ry N B. Leibe, A. Leonardis, and B. Schiele, Combined Object Categorization and Segmentation with an Implicit Shape Model, ECCV Workshop on Statistical Learning in Computer Vision 2004
70 Implicit shape models: Training 1. Build codebook of patches around extracted interest points using clustering Credit slide: S. Lazebnik


71 Implicit shape models: Training 1. Build codebook of patches around extracted interest points using clustering 2. Map the patch around each interest point to closest codebook entry 3. For each codebook entry, store all positions relative to object center [center is given] and scale [bounding box is given] Credit slide: S. Lazebnik
72 [Leibe, Leonardis, Schiele, SLCV 04; IJCV 08] Implicit Shape Model Recognition Interest Points Matched Codebook Entries Probabilistic Voting y s x 3D Voting Space (continuous) 22Nov11 74
![[Leibe, Leonardis, Schiele, SLCV 04; IJCV 08] Implicit Shape Model Recognition Interest Points Matched Codebook Entries](/docs-images/74/71294500/images/73-5.jpg "Probabilistic Voting y s x 3D Voting Space (continuous) Segmentation Backprojected Hypotheses Backprojection of Maxima")
73 [Leibe, Leonardis, Schiele, SLCV 04; IJCV 08] Implicit Shape Model Recognition Interest Points Matched Codebook Entries Probabilistic Voting y s x 3D Voting Space (continuous) Segmentation Backprojected Hypotheses Backprojection of Maxima 76
74 Probabilistic Hough Transform Image Feature Codebook match Object Position f = features l = location of the features. C = codebook entry O = object class x = object center Learnt using a max margin formulation Maji et al, CVPR 2009 Detection Score Position Posterior distribution of the centroid given the Codeword Ci observed at location lj. Codeword Match confidence (or weight) of the codeword Ci.
75 Computer Perceptual Vision and Sensory WS 08/09 Augmented Computing Example: Results on Cows Original image
76 Computer Perceptual Vision and Sensory WS 08/09 Augmented Computing Example: Results on Cows Interest Original points image
77 Computer Perceptual Vision and Sensory WS 08/09 Augmented Computing Example: Results on Cows Matched Interest Original points patches image




78 Computer Perceptual Vision and Sensory WS 08/09 Augmented Computing Example: Results on Cows Prob. Votes
79 Computer Perceptual Vision and Sensory WS 08/09 Augmented Computing Example: Results on Cows 1 st hypothesis
80 Computer Perceptual Vision and Sensory WS 08/09 Augmented Computing Example: Results on Cows 2 nd hypothesis
81 Computer Perceptual Vision and Sensory WS 08/09 Augmented Computing Example: Results on Cows 3 rd hypothesis
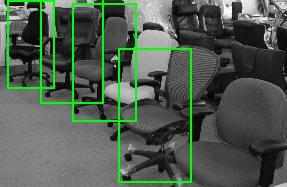
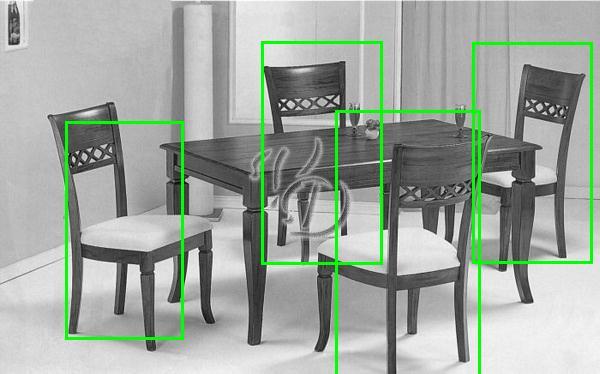


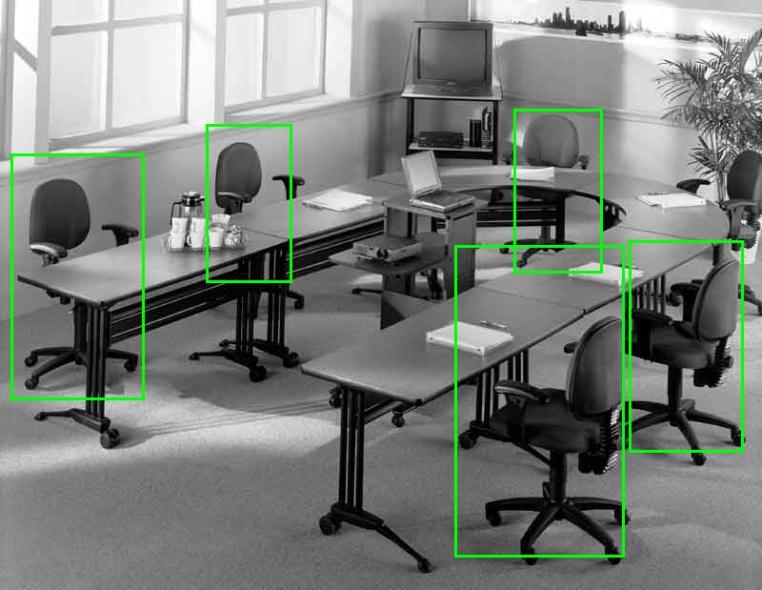






82 Computer Perceptual Vision and Sensory WS 08/09 Augmented Computing Example Results: Chairs Dining room chairs Office chairs
83 Computer Perceptual Vision and Sensory WS 08/09 Augmented Computing You Can Try It At Home Linux binaries available Including datasets & several pretrained detectors 88 Source: Bastian Leibe 22Nov11


84 89 Extension: Learning Feature Weights Subhransu Maji and Jitendra Malik, Object Detection Using a MaxMargin Hough Transform, CVPR 2009 Weights can be learned optimally using a maxmargin framework. Important Parts blue (low), dark red (high)

, dark")
85 Learned Weights (ETHZ shape) Naïve Bayes MaxMargin Influenced by clutter (rare structures) Important Parts blue (low), dark red (high) 95
")

,")
86 Learned Weights (UIUC cars) Naïve Bayes MaxMargin Important Parts blue (low), dark red (high) 96

87 Detection Results (ETHZ dataset) 1.0 False Positives Per Window 97
88 Conclusions Pros: Works well for many different object categories Both rigid and articulated objects Flexible geometric model Can recombine parts seen on different training examples Learning from relatively few (50100) training examples Optimized for detection, good localization properties Cons: Needs supervised training data Object bounding boxes for detection Segmentations for topdown segmentation No discriminative learning
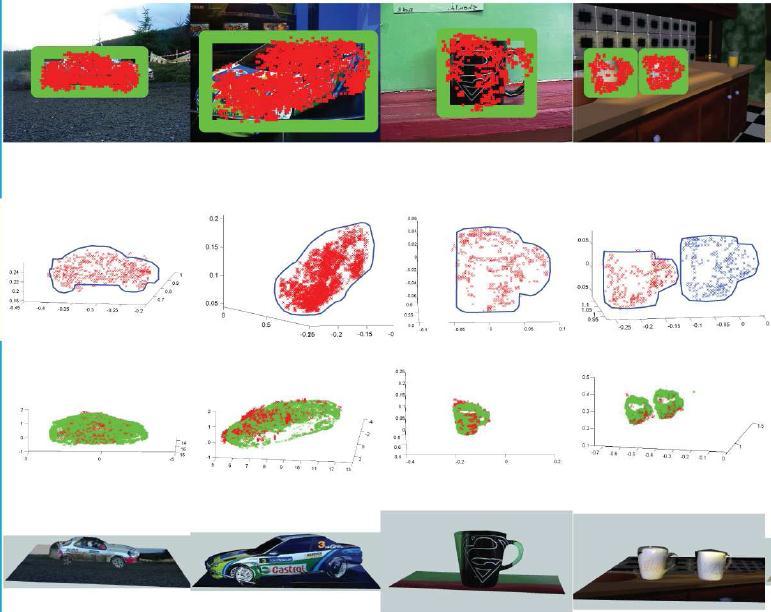
89 Object detection and 3d shape recovery from a single image M. Sun, B. Xu, G. Bradski, S. Savarese, ECCV 2010 M. Sun, S. Kumar, G. Bradski, S. Savarese, 3DIMPVT 2011 Object categories Arbitrary Texture, Topology Uncontrolled Environment Uncalibrated Camera



90 Depth Encoded Hough Voting s d : Object location x : Part with center location l and scale s
91 Depth Encoded Hough Voting Position Posterior Codeword likelihood Scale related to Depth C = Codebook f = Part appearance(feature), l = 2D location s = Scale of the part, d = Depth information, j j j j j i j j j i j i j j j i ds d l s p d s l C O p f C p d s l O C x p ), ( ),,, ( ) ( ),,,, (, Detection Score
92 Object detection and 3d shape recovery from a single image 3d reconsctruction

93 Object detection and 3d shape recovery from a single image 3d pose estimation

94 Object detection and 3d shape recovery from a single image 3d modeling



95 Object detection and 3d shape recovery from a single image CAD Alignment Texture Completion 105
96
97 Summary Part based models enable more descriptive characterization of objects Semantically useful regions Depth occlusions ISM models Generative Enable segmentation Require large supervision 22Nov11 107
Part-based models. Lecture 10
 Part-based models Lecture 10 Overview Representation Location Appearance Generative interpretation Learning Distance transforms Other approaches using parts Felzenszwalb, Girshick, McAllester, Ramanan
Part-based models Lecture 10 Overview Representation Location Appearance Generative interpretation Learning Distance transforms Other approaches using parts Felzenszwalb, Girshick, McAllester, Ramanan
Part based models for recognition. Kristen Grauman
 Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 20 Object Recognition 3 Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 20 Object Recognition 3 Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 20 Object Recognition 3 Mani Golparvar-Fard Department of Civil and Environmental Engineering Department of Computer Science 3129D,
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 20 Object Recognition 3 Mani Golparvar-Fard Department of Civil and Environmental Engineering Department of Computer Science 3129D,
Discriminative classifiers for image recognition
 Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Part-based and local feature models for generic object recognition
 Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
EECS 442 Computer vision. Object Recognition
 EECS 442 Computer vision Object Recognition Intro Recognition of 3D objects Recognition of object categories: Bag of world models Part based models 3D object categorization Computer Vision: Algorithms
EECS 442 Computer vision Object Recognition Intro Recognition of 3D objects Recognition of object categories: Bag of world models Part based models 3D object categorization Computer Vision: Algorithms
EECS 442 Computer vision. Fitting methods
 EECS 442 Computer vision Fitting methods - Problem formulation - Least square methods - RANSAC - Hough transforms - Multi-model fitting - Fitting helps matching! Reading: [HZ] Chapters: 4, 11 [FP] Chapters:
EECS 442 Computer vision Fitting methods - Problem formulation - Least square methods - RANSAC - Hough transforms - Multi-model fitting - Fitting helps matching! Reading: [HZ] Chapters: 4, 11 [FP] Chapters:
CS4495/6495 Introduction to Computer Vision. 8C-L1 Classification: Discriminative models
 CS4495/6495 Introduction to Computer Vision 8C-L1 Classification: Discriminative models Remember: Supervised classification Given a collection of labeled examples, come up with a function that will predict
CS4495/6495 Introduction to Computer Vision 8C-L1 Classification: Discriminative models Remember: Supervised classification Given a collection of labeled examples, come up with a function that will predict
Object Category Detection. Slides mostly from Derek Hoiem
 Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Lecture 12 Visual recognition
 Lecture 12 Visual recognition Bag of words models for object recognition and classification Discriminative methods Generative methods Silvio Savarese Lecture 11 17Feb14 Challenges Variability due to: View
Lecture 12 Visual recognition Bag of words models for object recognition and classification Discriminative methods Generative methods Silvio Savarese Lecture 11 17Feb14 Challenges Variability due to: View
Object Detection. Sanja Fidler CSC420: Intro to Image Understanding 1/ 1
 Object Detection Sanja Fidler CSC420: Intro to Image Understanding 1/ 1 Object Detection The goal of object detection is to localize objects in an image and tell their class Localization: place a tight
Object Detection Sanja Fidler CSC420: Intro to Image Understanding 1/ 1 Object Detection The goal of object detection is to localize objects in an image and tell their class Localization: place a tight
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Previously. Part-based and local feature models for generic object recognition. Bag-of-words model 4/20/2011
 Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Window based detectors
 Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Lecture 16: Object recognition: Part-based generative models
 Lecture 16: Object recognition: Part-based generative models Professor Stanford Vision Lab 1 What we will learn today? Introduction Constellation model Weakly supervised training One-shot learning (Problem
Lecture 16: Object recognition: Part-based generative models Professor Stanford Vision Lab 1 What we will learn today? Introduction Constellation model Weakly supervised training One-shot learning (Problem
Fitting. Instructor: Jason Corso (jjcorso)! web.eecs.umich.edu/~jjcorso/t/598f14!! EECS Fall 2014! Foundations of Computer Vision!
! web.eecs.umich.edu/~jjcorso/t/598f14!! EECS Fall 2014! Foundations of Computer Vision!") Fitting EECS 598-08 Fall 2014! Foundations of Computer Vision!! Instructor: Jason Corso (jjcorso)! web.eecs.umich.edu/~jjcorso/t/598f14!! Readings: FP 10; SZ 4.3, 5.1! Date: 10/8/14!! Materials on these
Fitting EECS 598-08 Fall 2014! Foundations of Computer Vision!! Instructor: Jason Corso (jjcorso)! web.eecs.umich.edu/~jjcorso/t/598f14!! Readings: FP 10; SZ 4.3, 5.1! Date: 10/8/14!! Materials on these
Lecture 8 Fitting and Matching
 Lecture 8 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi-model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Lecture 8 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi-model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Lecture 9 Fitting and Matching
 Lecture 9 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi- model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Lecture 9 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi- model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Lecture 15: Object recognition: Bag of Words models & Part based generative models
 Lecture 15: Object recognition: Bag of Words models & Part based generative models Professor Fei Fei Li Stanford Vision Lab 1 Basic issues Representation How to represent an object category; which classification
Lecture 15: Object recognition: Bag of Words models & Part based generative models Professor Fei Fei Li Stanford Vision Lab 1 Basic issues Representation How to represent an object category; which classification
Introduction to Object Recognition & Bag of Words (BoW) Models
 Models") : Introduction to Object Recognition & Bag of Words (BoW) Models Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Introduction to object recognition Representation Learning Recognition
: Introduction to Object Recognition & Bag of Words (BoW) Models Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Introduction to object recognition Representation Learning Recognition
Beyond bags of features: Adding spatial information. Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba
 Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Feature Matching and Robust Fitting
 Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Beyond Bags of features Spatial information & Shape models
 Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Object detection as supervised classification
 Object detection as supervised classification Tues Nov 10 Kristen Grauman UT Austin Today Supervised classification Window-based generic object detection basic pipeline boosting classifiers face detection
Object detection as supervised classification Tues Nov 10 Kristen Grauman UT Austin Today Supervised classification Window-based generic object detection basic pipeline boosting classifiers face detection
Visual Object Recognition
 Perceptual and Sensory Augmented Computing Visual Object Recognition Tutorial Visual Object Recognition Bastian Leibe Computer Vision Laboratory ETH Zurich Chicago, 14.07.2008 & Kristen Grauman Department
Perceptual and Sensory Augmented Computing Visual Object Recognition Tutorial Visual Object Recognition Bastian Leibe Computer Vision Laboratory ETH Zurich Chicago, 14.07.2008 & Kristen Grauman Department
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 16: Bag-of-words models Object Bag of words Announcements Project 3: Eigenfaces due Wednesday, November 11 at 11:59pm solo project Final project presentations:
CS6670: Computer Vision Noah Snavely Lecture 16: Bag-of-words models Object Bag of words Announcements Project 3: Eigenfaces due Wednesday, November 11 at 11:59pm solo project Final project presentations:
10/03/11. Model Fitting. Computer Vision CS 143, Brown. James Hays. Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem
 10/03/11 Model Fitting Computer Vision CS 143, Brown James Hays Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem Fitting: find the parameters of a model that best fit the data Alignment:
10/03/11 Model Fitting Computer Vision CS 143, Brown James Hays Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem Fitting: find the parameters of a model that best fit the data Alignment:
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 19 Object Recognition II Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 19 Object Recognition II Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Generic Object-Face detection
 Generic Object-Face detection Jana Kosecka Many slides adapted from P. Viola, K. Grauman, S. Lazebnik and many others Today Window-based generic object detection basic pipeline boosting classifiers face
Generic Object-Face detection Jana Kosecka Many slides adapted from P. Viola, K. Grauman, S. Lazebnik and many others Today Window-based generic object detection basic pipeline boosting classifiers face
Previously. Window-based models for generic object detection 4/11/2011
 Previously for generic object detection Monday, April 11 UT-Austin Instance recognition Local features: detection and description Local feature matching, scalable indexing Spatial verification Intro to
Previously for generic object detection Monday, April 11 UT-Austin Instance recognition Local features: detection and description Local feature matching, scalable indexing Spatial verification Intro to
Object detection. Announcements. Last time: Mid-level cues 2/23/2016. Wed Feb 24 Kristen Grauman UT Austin
 Object detection Wed Feb 24 Kristen Grauman UT Austin Announcements Reminder: Assignment 2 is due Mar 9 and Mar 10 Be ready to run your code again on a new test set on Mar 10 Vision talk next Tuesday 11
Object detection Wed Feb 24 Kristen Grauman UT Austin Announcements Reminder: Assignment 2 is due Mar 9 and Mar 10 Be ready to run your code again on a new test set on Mar 10 Vision talk next Tuesday 11
Model Fitting: The Hough transform II
 Model Fitting: The Hough transform II Guido Gerig, CS6640 Image Processing, Utah Theory: See handwritten notes GG: HT-notes-GG-II.pdf Credits: S. Narasimhan, CMU, Spring 2006 15-385,-685, Link Svetlana
Model Fitting: The Hough transform II Guido Gerig, CS6640 Image Processing, Utah Theory: See handwritten notes GG: HT-notes-GG-II.pdf Credits: S. Narasimhan, CMU, Spring 2006 15-385,-685, Link Svetlana
Supervised learning. y = f(x) function
 function") Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Methods for Representing and Recognizing 3D objects
 Methods for Representing and Recognizing 3D objects part 1 Silvio Savarese University of Michigan at Ann Arbor Object: Building, 45º pose, 8-10 meters away Object: Person, back; 1-2 meters away Object:
Methods for Representing and Recognizing 3D objects part 1 Silvio Savarese University of Michigan at Ann Arbor Object: Building, 45º pose, 8-10 meters away Object: Person, back; 1-2 meters away Object:
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Object Category Detection: Sliding Windows
 04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
Recognition with Bag-ofWords. (Borrowing heavily from Tutorial Slides by Li Fei-fei)
") Recognition with Bag-ofWords (Borrowing heavily from Tutorial Slides by Li Fei-fei) Recognition So far, we ve worked on recognizing edges Now, we ll work on recognizing objects We will use a bag-of-words
Recognition with Bag-ofWords (Borrowing heavily from Tutorial Slides by Li Fei-fei) Recognition So far, we ve worked on recognizing edges Now, we ll work on recognizing objects We will use a bag-of-words
Part-Based Models for Object Class Recognition Part 2
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
Part-Based Models for Object Class Recognition Part 2
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
Category vs. instance recognition
 Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Object Recognition. Computer Vision. Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce
 Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Hough Transform and RANSAC
 CS4501: Introduction to Computer Vision Hough Transform and RANSAC Various slides from previous courses by: D.A. Forsyth (Berkeley / UIUC), I. Kokkinos (Ecole Centrale / UCL). S. Lazebnik (UNC / UIUC),
CS4501: Introduction to Computer Vision Hough Transform and RANSAC Various slides from previous courses by: D.A. Forsyth (Berkeley / UIUC), I. Kokkinos (Ecole Centrale / UCL). S. Lazebnik (UNC / UIUC),
Recap Image Classification with Bags of Local Features
 Recap Image Classification with Bags of Local Features Bag of Feature models were the state of the art for image classification for a decade BoF may still be the state of the art for instance retrieval
Recap Image Classification with Bags of Local Features Bag of Feature models were the state of the art for image classification for a decade BoF may still be the state of the art for instance retrieval
Object and Class Recognition I:
 Object and Class Recognition I: Object Recognition Lectures 10 Sources ICCV 2005 short courses Li Fei-Fei (UIUC), Rob Fergus (Oxford-MIT), Antonio Torralba (MIT) http://people.csail.mit.edu/torralba/iccv2005
Object and Class Recognition I: Object Recognition Lectures 10 Sources ICCV 2005 short courses Li Fei-Fei (UIUC), Rob Fergus (Oxford-MIT), Antonio Torralba (MIT) http://people.csail.mit.edu/torralba/iccv2005
Modern Object Detection. Most slides from Ali Farhadi
 Modern Object Detection Most slides from Ali Farhadi Comparison of Classifiers assuming x in {0 1} Learning Objective Training Inference Naïve Bayes maximize j i logp + logp ( x y ; θ ) ( y ; θ ) i ij
Modern Object Detection Most slides from Ali Farhadi Comparison of Classifiers assuming x in {0 1} Learning Objective Training Inference Naïve Bayes maximize j i logp + logp ( x y ; θ ) ( y ; θ ) i ij
Templates and Background Subtraction. Prof. D. Stricker Doz. G. Bleser
 Templates and Background Subtraction Prof. D. Stricker Doz. G. Bleser 1 Surveillance Video: Example of multiple people tracking http://www.youtube.com/watch?v=inqv34bchem&feature=player_embedded As for
Templates and Background Subtraction Prof. D. Stricker Doz. G. Bleser 1 Surveillance Video: Example of multiple people tracking http://www.youtube.com/watch?v=inqv34bchem&feature=player_embedded As for
Finding 2D Shapes and the Hough Transform
 CS 4495 Computer Vision Finding 2D Shapes and the Aaron Bobick School of Interactive Computing Administrivia Today: Modeling Lines and Finding them CS4495: Problem set 1 is still posted. Please read the
CS 4495 Computer Vision Finding 2D Shapes and the Aaron Bobick School of Interactive Computing Administrivia Today: Modeling Lines and Finding them CS4495: Problem set 1 is still posted. Please read the
Bag of Words Models. CS4670 / 5670: Computer Vision Noah Snavely. Bag-of-words models 11/26/2013
 CS4670 / 5670: Computer Vision Noah Snavely Bag-of-words models Object Bag of words Bag of Words Models Adapted from slides by Rob Fergus and Svetlana Lazebnik 1 Object Bag of words Origin 1: Texture Recognition
CS4670 / 5670: Computer Vision Noah Snavely Bag-of-words models Object Bag of words Bag of Words Models Adapted from slides by Rob Fergus and Svetlana Lazebnik 1 Object Bag of words Origin 1: Texture Recognition
Detection III: Analyzing and Debugging Detection Methods
 CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
Patch Descriptors. CSE 455 Linda Shapiro
 Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Image Analysis. Window-based face detection: The Viola-Jones algorithm. iphoto decides that this is a face. It can be trained to recognize pets!
 Image Analysis 2 Face detection and recognition Window-based face detection: The Viola-Jones algorithm Christophoros Nikou cnikou@cs.uoi.gr Images taken from: D. Forsyth and J. Ponce. Computer Vision:
Image Analysis 2 Face detection and recognition Window-based face detection: The Viola-Jones algorithm Christophoros Nikou cnikou@cs.uoi.gr Images taken from: D. Forsyth and J. Ponce. Computer Vision:
High Level Computer Vision
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de http://www.d2.mpi-inf.mpg.de/cv Please Note No
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de http://www.d2.mpi-inf.mpg.de/cv Please Note No
Introduction to object recognition. Slides adapted from Fei-Fei Li, Rob Fergus, Antonio Torralba, and others
 Introduction to object recognition Slides adapted from Fei-Fei Li, Rob Fergus, Antonio Torralba, and others Overview Basic recognition tasks A statistical learning approach Traditional or shallow recognition
Introduction to object recognition Slides adapted from Fei-Fei Li, Rob Fergus, Antonio Torralba, and others Overview Basic recognition tasks A statistical learning approach Traditional or shallow recognition
Supervised learning. y = f(x) function
 function") Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Local Features based Object Categories and Object Instances Recognition
 Local Features based Object Categories and Object Instances Recognition Eric Nowak Ph.D. thesis defense 17th of March, 2008 1 Thesis in Computer Vision Computer vision is the science and technology of
Local Features based Object Categories and Object Instances Recognition Eric Nowak Ph.D. thesis defense 17th of March, 2008 1 Thesis in Computer Vision Computer vision is the science and technology of
ObjectDetectionusingaMax-MarginHoughTransform
 ObjectDetectionusingaMax-MarginHoughTransform Subhransu Maji, Jitendra Malik Computer Science Division, EECS University of California at Berkeley {smaji,malik}@cs.berkeley.edu Abstract We present a discriminative
ObjectDetectionusingaMax-MarginHoughTransform Subhransu Maji, Jitendra Malik Computer Science Division, EECS University of California at Berkeley {smaji,malik}@cs.berkeley.edu Abstract We present a discriminative
Instance-level recognition part 2
 Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Patch-based Object Recognition. Basic Idea
 Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Instance-level recognition II.
 Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Fitting: Voting and the Hough Transform April 23 rd, Yong Jae Lee UC Davis
 Fitting: Voting and the Hough Transform April 23 rd, 2015 Yong Jae Lee UC Davis Last time: Grouping Bottom-up segmentation via clustering To find mid-level regions, tokens General choices -- features,
Fitting: Voting and the Hough Transform April 23 rd, 2015 Yong Jae Lee UC Davis Last time: Grouping Bottom-up segmentation via clustering To find mid-level regions, tokens General choices -- features,
Lecture 15 Visual recognition
 Lecture 15 Visual recognition 3D object detection Introduction Single instance 3D object detectors Generic 3D object detectors Silvio Savarese Lecture 15-26-Feb-14 3D object detection Object: Building
Lecture 15 Visual recognition 3D object detection Introduction Single instance 3D object detectors Generic 3D object detectors Silvio Savarese Lecture 15-26-Feb-14 3D object detection Object: Building
Part-Based Models for Object Class Recognition Part 3
 High Level Computer Vision! Part-Based Models for Object Class Recognition Part 3 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de! http://www.d2.mpi-inf.mpg.de/cv ! State-of-the-Art
High Level Computer Vision! Part-Based Models for Object Class Recognition Part 3 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de! http://www.d2.mpi-inf.mpg.de/cv ! State-of-the-Art
Image classification Computer Vision Spring 2018, Lecture 18
 Image classification http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 18 Course announcements Homework 5 has been posted and is due on April 6 th. - Dropbox link because course
Image classification http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 18 Course announcements Homework 5 has been posted and is due on April 6 th. - Dropbox link because course
Machine Learning Crash Course
 Machine Learning Crash Course Photo: CMU Machine Learning Department protests G20 Computer Vision James Hays Slides: Isabelle Guyon, Erik Sudderth, Mark Johnson, Derek Hoiem The machine learning framework
Machine Learning Crash Course Photo: CMU Machine Learning Department protests G20 Computer Vision James Hays Slides: Isabelle Guyon, Erik Sudderth, Mark Johnson, Derek Hoiem The machine learning framework
Object recognition (part 1)
") Recognition Object recognition (part 1) CSE P 576 Larry Zitnick (larryz@microsoft.com) The Margaret Thatcher Illusion, by Peter Thompson Readings Szeliski Chapter 14 Recognition What do we mean by object
Recognition Object recognition (part 1) CSE P 576 Larry Zitnick (larryz@microsoft.com) The Margaret Thatcher Illusion, by Peter Thompson Readings Szeliski Chapter 14 Recognition What do we mean by object
Loose Shape Model for Discriminative Learning of Object Categories
 Loose Shape Model for Discriminative Learning of Object Categories Margarita Osadchy and Elran Morash Computer Science Department University of Haifa Mount Carmel, Haifa 31905, Israel rita@cs.haifa.ac.il
Loose Shape Model for Discriminative Learning of Object Categories Margarita Osadchy and Elran Morash Computer Science Department University of Haifa Mount Carmel, Haifa 31905, Israel rita@cs.haifa.ac.il
Category-level localization
 Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Fusing shape and appearance information for object category detection
 1 Fusing shape and appearance information for object category detection Andreas Opelt, Axel Pinz Graz University of Technology, Austria Andrew Zisserman Dept. of Engineering Science, University of Oxford,
1 Fusing shape and appearance information for object category detection Andreas Opelt, Axel Pinz Graz University of Technology, Austria Andrew Zisserman Dept. of Engineering Science, University of Oxford,
Feature Matching + Indexing and Retrieval
 CS 1699: Intro to Computer Vision Feature Matching + Indexing and Retrieval Prof. Adriana Kovashka University of Pittsburgh October 1, 2015 Today Review (fitting) Hough transform RANSAC Matching points
CS 1699: Intro to Computer Vision Feature Matching + Indexing and Retrieval Prof. Adriana Kovashka University of Pittsburgh October 1, 2015 Today Review (fitting) Hough transform RANSAC Matching points
Category-level Localization
 Category-level Localization Andrew Zisserman Visual Geometry Group University of Oxford http://www.robots.ox.ac.uk/~vgg Includes slides from: Ondra Chum, Alyosha Efros, Mark Everingham, Pedro Felzenszwalb,
Category-level Localization Andrew Zisserman Visual Geometry Group University of Oxford http://www.robots.ox.ac.uk/~vgg Includes slides from: Ondra Chum, Alyosha Efros, Mark Everingham, Pedro Felzenszwalb,
Object detection using non-redundant local Binary Patterns
 University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2010 Object detection using non-redundant local Binary Patterns Duc Thanh
University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2010 Object detection using non-redundant local Binary Patterns Duc Thanh
Structured Models in. Dan Huttenlocher. June 2010
 Structured Models in Computer Vision i Dan Huttenlocher June 2010 Structured Models Problems where output variables are mutually dependent or constrained E.g., spatial or temporal relations Such dependencies
Structured Models in Computer Vision i Dan Huttenlocher June 2010 Structured Models Problems where output variables are mutually dependent or constrained E.g., spatial or temporal relations Such dependencies
Overview of section. Lecture 10 Discriminative models. Discriminative methods. Discriminative vs. generative. Discriminative methods.
 Overview of section Lecture 0 Discriminative models Object detection with classifiers Boosting Gentle boosting Object model Object detection Nearest-Neighbor methods Multiclass object detection Context
Overview of section Lecture 0 Discriminative models Object detection with classifiers Boosting Gentle boosting Object model Object detection Nearest-Neighbor methods Multiclass object detection Context
Course Administration
 Course Administration Project 2 results are online Project 3 is out today The first quiz is a week from today (don t panic!) Covers all material up to the quiz Emphasizes lecture material NOT project topics
Course Administration Project 2 results are online Project 3 is out today The first quiz is a week from today (don t panic!) Covers all material up to the quiz Emphasizes lecture material NOT project topics
Selection of Scale-Invariant Parts for Object Class Recognition
 Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Beyond Bags of Features
 : for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
: for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
Recognition Tools: Support Vector Machines
 CS 2770: Computer Vision Recognition Tools: Support Vector Machines Prof. Adriana Kovashka University of Pittsburgh January 12, 2017 Announcement TA office hours: Tuesday 4pm-6pm Wednesday 10am-12pm Matlab
CS 2770: Computer Vision Recognition Tools: Support Vector Machines Prof. Adriana Kovashka University of Pittsburgh January 12, 2017 Announcement TA office hours: Tuesday 4pm-6pm Wednesday 10am-12pm Matlab
Linear combinations of simple classifiers for the PASCAL challenge
 Linear combinations of simple classifiers for the PASCAL challenge Nik A. Melchior and David Lee 16 721 Advanced Perception The Robotics Institute Carnegie Mellon University Email: melchior@cmu.edu, dlee1@andrew.cmu.edu
Linear combinations of simple classifiers for the PASCAL challenge Nik A. Melchior and David Lee 16 721 Advanced Perception The Robotics Institute Carnegie Mellon University Email: melchior@cmu.edu, dlee1@andrew.cmu.edu
Face Detection and Alignment. Prof. Xin Yang HUST
 Face Detection and Alignment Prof. Xin Yang HUST Many slides adapted from P. Viola Face detection Face detection Basic idea: slide a window across image and evaluate a face model at every location Challenges
Face Detection and Alignment Prof. Xin Yang HUST Many slides adapted from P. Viola Face detection Face detection Basic idea: slide a window across image and evaluate a face model at every location Challenges
Bag-of-features. Cordelia Schmid
 Bag-of-features for category classification Cordelia Schmid Visual search Particular objects and scenes, large databases Category recognition Image classification: assigning a class label to the image
Bag-of-features for category classification Cordelia Schmid Visual search Particular objects and scenes, large databases Category recognition Image classification: assigning a class label to the image
Today. Introduction to recognition Alignment based approaches 11/4/2008
 Today Introduction to recognition Alignment based approaches Tuesday, Nov 4 Brief recap of visual words Introduction to recognition problem Recognition by alignment, pose clustering Kristen Grauman UT
Today Introduction to recognition Alignment based approaches Tuesday, Nov 4 Brief recap of visual words Introduction to recognition problem Recognition by alignment, pose clustering Kristen Grauman UT
Bayes Risk. Classifiers for Recognition Reading: Chapter 22 (skip 22.3) Discriminative vs Generative Models. Loss functions in classifiers
 Discriminative vs Generative Models. Loss functions in classifiers") Classifiers for Recognition Reading: Chapter 22 (skip 22.3) Examine each window of an image Classify object class within each window based on a training set images Example: A Classification Problem Categorize
Classifiers for Recognition Reading: Chapter 22 (skip 22.3) Examine each window of an image Classify object class within each window based on a training set images Example: A Classification Problem Categorize
Model Fitting: The Hough transform I
 Model Fitting: The Hough transform I Guido Gerig, CS6640 Image Processing, Utah Credit: Svetlana Lazebnik (Computer Vision UNC Chapel Hill, 2008) Fitting Parametric Models: Beyond Lines Choose a parametric
Model Fitting: The Hough transform I Guido Gerig, CS6640 Image Processing, Utah Credit: Svetlana Lazebnik (Computer Vision UNC Chapel Hill, 2008) Fitting Parametric Models: Beyond Lines Choose a parametric
Patch Descriptors. EE/CSE 576 Linda Shapiro
 Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Learning the Compositional Nature of Visual Objects
 Learning the Compositional Nature of Visual Objects Björn Ommer Joachim M. Buhmann Institute of Computational Science, ETH Zurich 8092 Zurich, Switzerland bjoern.ommer@inf.ethz.ch jbuhmann@inf.ethz.ch
Learning the Compositional Nature of Visual Objects Björn Ommer Joachim M. Buhmann Institute of Computational Science, ETH Zurich 8092 Zurich, Switzerland bjoern.ommer@inf.ethz.ch jbuhmann@inf.ethz.ch
Efficient Kernels for Identifying Unbounded-Order Spatial Features
 Efficient Kernels for Identifying Unbounded-Order Spatial Features Yimeng Zhang Carnegie Mellon University yimengz@andrew.cmu.edu Tsuhan Chen Cornell University tsuhan@ece.cornell.edu Abstract Higher order
Efficient Kernels for Identifying Unbounded-Order Spatial Features Yimeng Zhang Carnegie Mellon University yimengz@andrew.cmu.edu Tsuhan Chen Cornell University tsuhan@ece.cornell.edu Abstract Higher order
Classifiers for Recognition Reading: Chapter 22 (skip 22.3)
") Classifiers for Recognition Reading: Chapter 22 (skip 22.3) Examine each window of an image Classify object class within each window based on a training set images Slide credits for this chapter: Frank
Classifiers for Recognition Reading: Chapter 22 (skip 22.3) Examine each window of an image Classify object class within each window based on a training set images Slide credits for this chapter: Frank
Detecting Object Instances Without Discriminative Features
 Detecting Object Instances Without Discriminative Features Edward Hsiao June 19, 2013 Thesis Committee: Martial Hebert, Chair Alexei Efros Takeo Kanade Andrew Zisserman, University of Oxford 1 Object Instance
Detecting Object Instances Without Discriminative Features Edward Hsiao June 19, 2013 Thesis Committee: Martial Hebert, Chair Alexei Efros Takeo Kanade Andrew Zisserman, University of Oxford 1 Object Instance
Object Classification for Video Surveillance
 Object Classification for Video Surveillance Rogerio Feris IBM TJ Watson Research Center rsferis@us.ibm.com http://rogerioferis.com 1 Outline Part I: Object Classification in Far-field Video Part II: Large
Object Classification for Video Surveillance Rogerio Feris IBM TJ Watson Research Center rsferis@us.ibm.com http://rogerioferis.com 1 Outline Part I: Object Classification in Far-field Video Part II: Large
TA Section: Problem Set 4
 TA Section: Problem Set 4 Outline Discriminative vs. Generative Classifiers Image representation and recognition models Bag of Words Model Part-based Model Constellation Model Pictorial Structures Model
TA Section: Problem Set 4 Outline Discriminative vs. Generative Classifiers Image representation and recognition models Bag of Words Model Part-based Model Constellation Model Pictorial Structures Model
Naïve Bayes for text classification
 Road Map Basic concepts Decision tree induction Evaluation of classifiers Rule induction Classification using association rules Naïve Bayesian classification Naïve Bayes for text classification Support
Road Map Basic concepts Decision tree induction Evaluation of classifiers Rule induction Classification using association rules Naïve Bayesian classification Naïve Bayes for text classification Support
Perception IV: Place Recognition, Line Extraction
 Perception IV: Place Recognition, Line Extraction Davide Scaramuzza University of Zurich Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Outline of Today s lecture Place recognition using
Perception IV: Place Recognition, Line Extraction Davide Scaramuzza University of Zurich Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Outline of Today s lecture Place recognition using
Modeling 3D viewpoint for part-based object recognition of rigid objects
 Modeling 3D viewpoint for part-based object recognition of rigid objects Joshua Schwartz Department of Computer Science Cornell University jdvs@cs.cornell.edu Abstract Part-based object models based on
Modeling 3D viewpoint for part-based object recognition of rigid objects Joshua Schwartz Department of Computer Science Cornell University jdvs@cs.cornell.edu Abstract Part-based object models based on
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2013 TTh 17:30-18:45 FDH 204 Lecture 18 130404 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Object Recognition Intro (Chapter 14) Slides from
EE795: Computer Vision and Intelligent Systems Spring 2013 TTh 17:30-18:45 FDH 204 Lecture 18 130404 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Object Recognition Intro (Chapter 14) Slides from
Computer Vision. Exercise Session 10 Image Categorization
 Computer Vision Exercise Session 10 Image Categorization Object Categorization Task Description Given a small number of training images of a category, recognize a-priori unknown instances of that category
Computer Vision Exercise Session 10 Image Categorization Object Categorization Task Description Given a small number of training images of a category, recognize a-priori unknown instances of that category