Anno accademico 2006/2007. Davide Migliore
|
|
|
- Rosaline Barnett
- 5 years ago
- Views:
Transcription

1 Robotica Anno accademico 6/7 Davide Migliore
2 Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!? 7//6 Corso di Robotica 6/7

3 What is a feature? 7//6 Corso di Robotica 6/7
4 Images An image is a matrix of pixels Resolution Digital cameras: 6 X at a minimum Video cameras: ~64 X 48 Grayscale: generally 8 bits per pixel Intensities in range [ 55] RGB color: 8-bit color planes 7//6 Corso di Robotica 6/7 4
5 Image conversion RGB Grayscale: Mean color value, or weight by perceptual importance Grayscale Binary: Choose threshold based on histogram of image intensities 7//6 Corso di Robotica 6/7 5

, (Y)UV, etc.")
6 Color representation RGB, HSV (hue, saturation, value), YUV, etc. Luminance: Perceived intensity Chrominance: Perceived color HS(V), (Y)UV, etc. Normalized RGB removes some illumination dependence: 7//6 Corso di Robotica 6/7 6
7 Binary Operations Dilation, erosion Connected components Dilation: All s next to a (Enlarge foreground) Erosion: All s next to a (Enlarge background) Uniquely label each n-connected region in binary image 4- and 8-connectedness Moments: Region statistics Zeroth-order: Size First-order: Position (centroid) Second-order: Orientation 7//6 Corso di Robotica 6/7 7
8 Bilinear Interpolation Idea: Blend four pixel values surrounding source, weighted by nearness Vertical blend 7//6 Horizontal blend Corso di Robotica 6/7 8

 7//6 Corso di")
9 Image Comparison: SSD Given a template image and an image, how to quantify the similarity between them for a given alignment? Sum of squared differences (SSD) 7//6 Corso di Robotica 6/7 9

10 Cross-Correlation for Template Matching Note that SSD formula can be written: First two terms fixed last term measures mismatch the cross-correlation: In practice, normalize by image magnitude when shifting template to search for matches 7//6 Corso di Robotica 6/7
11 Filtering Idea: Analyze neighborhood around some point in image with filter function ; put result in new image at corresponding location System properties Shift invariance: Same inputs give same outputs, regardless of location Superposition: Output on sum of images = Sum of outputs on separate images Scaling: Output on scaled image = Scaled output on image Linear shift invariance Convolution 7//6 Corso di Robotica 6/7
12 Discrete Filtering - - Linear filter: Weighted sum of pixels over - rectangular neighborhood kernel defines weights Think of kernel as template being matched by correlation Convolution: Correlation with kernel rotated 8 Dealing with image edges Zero-padding Border replication 7//6 Corso di Robotica 6/7
13 Convolution Definition: Shorter notation: Properties Commutative Associative Fourier theorem: Convolution in spatial domain = Multiplication in frequency domain 7//6 Corso di Robotica 6/7
14 Filtering Example : Rotate //6 Corso di Robotica 6/7 4
15 //6 Step Corso di Robotica 6/7 5
16 - Step - - 7// Corso di Robotica 6/7 4 6
17 Step //6 Corso di Robotica 6/7 7
18 Step // Corso di Robotica 6/
19 //6 Step Corso di Robotica 6/
20 //6 Step Corso di Robotica 6/7 4 -
21 Final Result // Corso di Robotica 6/7
22 Separability Definition: -D kernel can be written as convolution of two -D kernels Advantage: Efficiency Convolving image with kernel requires multiplies vs. for nonseparable kernel 7//6 Corso di Robotica 6/7
23 Smoothing (Low-Pass) Filters Replace each pixel with average of neighbors Benefits: Suppress noise, aliasing Disadvantage: Sharp features blurred Types Mean filter (box) Median (nonlinear) Gaussian x box filter 7//6 Corso di Robotica 6/7
24 Box Filter: Smoothing Original image 7//6 7 x 7 kernel Corso di Robotica 6/7 4



25 Gaussian Kernel Idea: Weight contributions of neighboring pixels by nearness 7//6 Corso di Robotica 6/7 5
 Smooth roll-off reduces ringing")

26 Gaussian: Benefits Rotational symmetry treats features of all orientations equally (isotropy) Smooth roll-off reduces ringing Efficient: Rule of thumb is kernel width 5σ Separable Cascadable: Approach to large σ comes from identity 7//6 Corso di Robotica 6/7 6

27 Gaussian: Smoothing Original image 7x7 kernel σ= 7//6 σ= Corso di Robotica 6/7 7

28 The Features world 7//6 Corso di Robotica 6/7 8
29 Edge Causes Depth discontinuity Surface orientation discontinuity Reflectance discontinuity (i.e., change in surface material properties) Illumination discontinuity (e.g., shadow) surface normal discontinuity depth discontinuity surface color discontinuity illumination discontinuity 7//6 Corso di Robotica 6/7 9


30 Gradient Think of image intensities as a function. Gradient of image is a vector field as for a normal -D height function: Edge: Place where gradient magnitude is high; orthogonal to gradient direction 7//6 Corso di Robotica 6/7
31 What is the gradient? No Change I I, = (k,) x y Change 7//6 Corso di Robotica 6/7
32 What is the gradient? Change I I, = (, k ) x y No Change 7//6 Corso di Robotica 6/7
33 What is the gradient? I I, = (k, k ) x y Gradient direction is perpendicular to edge. Gradient Magnitude measures edge strength. 7//6 Less Change Much Change Corso di Robotica 6/7
34 Edge Detection Edge Types Step edge (ramp) Line edge (roof) Searching for Edges: Filter: Smooth image Enhance: Apply numerical derivative approximation Detect: Threshold to find strong edges Localize/analyze: Reject spurious edges, include weak but justified edges 7//6 Corso di Robotica 6/7 4

35 Effects of noise Consider a single row or column of the image Plotting intensity as a function of position gives a signal 7//6 Corso di Robotica 6/7 5
36 Effects of noise: solution 7//6 Corso di Robotica 6/7 6
37 Step edge detection First derivative edge detectors: Look extrema - Sobel operator - Prewitt, Roberts cross - Derivative of Gaussian Sobel x for Sobel y Second derivative: Look for zero-crossings Laplacian Second directional derivative Laplacian of Gaussian/Difference of Gaussians 7//6 : Isotropic Corso di Robotica 6/7 7
38 Prewitt, Roberts cross (a): Roberts cross operator (b): x Prewitt operator (c): Sobel operator (d) 4x4 Prewitt operator 7//6 Corso di Robotica 6/7 8
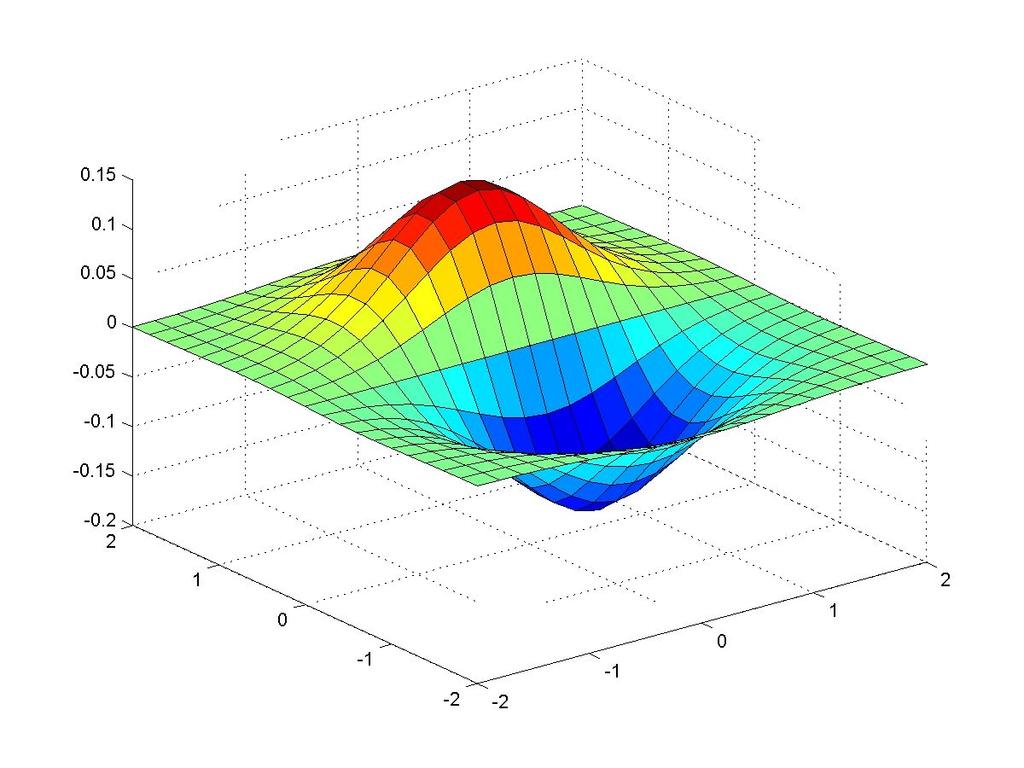
39 Derivative of Gaussian 7//6 Corso di Robotica 6/7 9
40 Derivative of Gaussian Derivative theorem of convolution 7//6 Corso di Robotica 6/7 4



41 Laplacian of Gaussian 7//6 Corso di Robotica 6/7 4
42 Laplacian of Gaussian Consider Laplacian of Gaussian operator 7//6 Corso di Robotica 6/7 4
43 Edge Filtering Example Rotate 7// Corso di Robotica 6/7 4
44 - - - Step //6 Corso di Robotica 6/7 44
45 //6 Step - 4 Corso di Robotica 6/7 6 45
46 //6 Step - 4 Corso di Robotica 6/
47 //6 Step Corso di Robotica 6/ edge effect 47


48 Sobel Edge Detection: Gradient Approximation Horizontal 7//6 Vertical Corso di Robotica 6/7 48


49 Sobel vs. LoG Edge Detection Sobel 7//6 LoG Corso di Robotica 6/7 49
50 Canny Edge Detection Derivative of Gaussian Non-maximum suppression Thin multi-pixel wide ridges down to single pixel Thresholding Low, high edge-strength thresholds Accept all edges over low threshold that are connected to edge over high threshold 7//6 Corso di Robotica 6/7 5

51 Non-maximum Suppression We wish to mark points along the curve where the magnitude is biggest. 7//6 Corso di Robotica 6/7 5
52 Non-maximum Suppression At q, we have a maximum if the value is larger than those at both p and at r. Interpolate to get these values. 7//6 Corso di Robotica 6/7 5
53 Non-maximum Suppression Assume the marked point is an edge point. Then we construct the tangent to the edge curve (which is normal to the gradient at that point) and use this to predict the next points (here either r or s). 7//6 Corso di Robotica 6/7 5


54 Non-maximum Suppression courtesy of G. Loy Original image 7//6 Gradient magnitude Corso di Robotica 6/7 Non-maxima suppressed 54
55 Edge Hysteresis Hysteresis: A lag or momentum factor Idea: Maintain two thresholds khigh and klow Use khigh to find strong edges to start edge chain Use klow to find weak edges which continue edge chain Typical ratio of thresholds is roughly khigh / klow = 7//6 Corso di Robotica 6/7 55



56 Edge Hysteresis gap is gone Strong + connected weak edges Original image Strong edges only Weak edges courtesy of G. Loy 7//6 Corso di Robotica 6/7 56

57 Canny Edge Detection: Example 7//6 Corso di Robotica 6/7 57

58 Edge detection by subtraction original 7//6 Corso di Robotica 6/7 58
59 Edge detection by subtraction smoothed (5x5 Gaussian) 7//6 Corso di Robotica 6/7 59
 7//6 Corso di")
60 Edge detection by subtraction Why does this work? smoothed original (scaled by 4, offset +8) 7//6 Corso di Robotica 6/7 6
61 Gaussian - image filter Laplacian of Gaussian Gaussian 7//6 delta function Corso di Robotica 6/7 6


62 An edge is not a line... How can we detect lines? 7//6 Corso di Robotica 6/7 6
63 Finding lines in an image Option : Search for the line at every possible position/orientation What is the cost of this operation? Option : 7//6 Use a voting scheme: Hough transform Corso di Robotica 6/7 6
64 Finding lines in an image y b b m x image space m Hough space Connection between image (x,y) and Hough (m,b) spaces A line in the image corresponds to a point in Hough space To go from image space to Hough space: given a set of points (x,y), find all (m,b) such that y = mx + b 7//6 Corso di Robotica 6/7 64
65 Finding lines in an image y b y x image space x Hough space m Connection between image (x,y) and Hough (m,b) spaces A line in the image corresponds to a point in Hough space To go from image space to Hough space: given a set of points (x,y), find all (m,b) such that y = mx +b What does a point (x, y) in the image space map to? A: the solutions of b = -xm + y this is a line in Hough space 7//6 Corso di Robotica 6/7 65
66 Hough transform algorithm Typically use a different parameterization d is the perpendicular distance from the line to the origin θ is the angle this perpendicular makes with the x axis Why? 7//6 Corso di Robotica 6/7 66
67 Hough transform algorithm Typically use a different parameterization d is the perpendicular distance from the line to the origin θ is the angle this perpendicular makes with the x axis Why? Basic Hough transform algorithm. Initialize H[d, θ]=. for each edge point I[x,y] in the image for θ = to 8 H[d, θ] +=. Find the value(s) of (d, θ) where H[d, θ] is maximum 4. The detected line in the image is given by What s the running time (measured in # votes)? 7//6 Corso di Robotica 6/7 67

68 Hough transform algorithm tokens Votes Horizontal axis is θ, vertical is d. 7//6 Corso di Robotica 6/7 68

69 Hough transform algorithm tokens 7//6 votes Corso di Robotica 6/7 69

70 Hough transform algorithm 7//6 Corso di Robotica 6/7 7
71 Extensions Extension : Use the image gradient. same. for each edge point I[x,y] in the image compute unique (d, θ) based on image gradient at (x,y) H[d, θ] +=. same 4. same What s the running time measured in votes? 7//6 Corso di Robotica 6/7 7
72 Extensions Extension : Use the image gradient. same. for each edge point I[x,y] in the image compute unique (d, θ) based on image gradient at (x,y) H[d, θ] +=. same 4. same What s the running time measured in votes? Extension give more votes for stronger edges Extension change the sampling of (d, θ) to give more/less resolution Extension 4 7//6 The same procedure can be used with circles, squares, or any other shape Corso di Robotica 6/7 7
73 Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so are worth detecting. Idea: Exactly at a corner, gradient is ill defined. However, in the region around a corner, gradient has two or more different values. 7//6 Corso di Robotica 6/7 7


74 Corner Detection Basic idea: Find points where two edges meet i.e., high gradient in orthogonal directions Examine gradient over window (Shi & Tomasi, 994) Edge strength encoded by eigenvalues corner is where over threshold Harris corners (Harris & Stephens, 988), Susan corners (Smith & Brady, 997) 7//6 Corso di Robotica 6/7 ; 74
75 The Harris corner detector Form the second-moment matrix: Gradient with respect to x, times gradient with respect to y Sum over a small region around the hypothetical corner I C= I x I y x I I I x y y Matrix is symmetric 7//6 Corso di Robotica 6/7 Slide credit: David Jacobs 75
76 Simple Case First, consider case where: I C= I x I y x I I I x y y λ = λ This means dominant gradient directions align with x or y axis If either λ is close to, then this is not a corner, so look for locations where both are large. 7//6 Corso di Robotica 6/7 76
77 General Case It can be shown that since C is symmetric: λ C=R R λ So every case is like a rotated version of the one on last slide. 7//6 Corso di Robotica 6/7 77
78 So, to detect corners Filter image with Gaussian to reduce noise Compute magnitude of the x and y gradients at each pixel Construct C in a window around each pixel (Harris uses a Gaussian window just blur) Solve for product of λs (determinant of C) If λs are both big (product reaches local maximum and is above threshold), we have a corner (Harris also checks that ratio of λs is not too high) 7//6 Corso di Robotica 6/7 78


79 Gradient Orientations 7//6 Corso di Robotica 6/7 79

80 Step : Gradient Orientations 7//6 Corso di Robotica 6/7 8

81 Eigenvalues Corners are detected where the product of the ellipse axis lengths reaches a local maximum. 7//6 Corso di Robotica 6/7 8

82 Example: Corner Detection courtesy of S. Smith SUSAN corners 7//6 Corso di Robotica 6/7 8
Edge Detection. Announcements. Edge detection. Origin of Edges. Mailing list: you should have received messages
 Announcements Mailing list: csep576@cs.washington.edu you should have received messages Project 1 out today (due in two weeks) Carpools Edge Detection From Sandlot Science Today s reading Forsyth, chapters
Announcements Mailing list: csep576@cs.washington.edu you should have received messages Project 1 out today (due in two weeks) Carpools Edge Detection From Sandlot Science Today s reading Forsyth, chapters
Edge detection. Convert a 2D image into a set of curves. Extracts salient features of the scene More compact than pixels
 Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection
 Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection
 COS 429: COMPUTER VISON Linear Filters and Edge Detection convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection Reading:
COS 429: COMPUTER VISON Linear Filters and Edge Detection convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection Reading:
Other Linear Filters CS 211A
 Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
Edge Detection. CSE 576 Ali Farhadi. Many slides from Steve Seitz and Larry Zitnick
 Edge Detection CSE 576 Ali Farhadi Many slides from Steve Seitz and Larry Zitnick Edge Attneave's Cat (1954) Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity
Edge Detection CSE 576 Ali Farhadi Many slides from Steve Seitz and Larry Zitnick Edge Attneave's Cat (1954) Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity
Announcements. Edges. Last Lecture. Gradients: Numerical Derivatives f(x) Edge Detection, Lines. Intro Computer Vision. CSE 152 Lecture 10
 Edge Detection, Lines. Intro Computer Vision. CSE 152 Lecture 10") Announcements Assignment 2 due Tuesday, May 4. Edge Detection, Lines Midterm: Thursday, May 6. Introduction to Computer Vision CSE 152 Lecture 10 Edges Last Lecture 1. Object boundaries 2. Surface normal
Announcements Assignment 2 due Tuesday, May 4. Edge Detection, Lines Midterm: Thursday, May 6. Introduction to Computer Vision CSE 152 Lecture 10 Edges Last Lecture 1. Object boundaries 2. Surface normal
Computer Vision I. Announcements. Fourier Tansform. Efficient Implementation. Edge and Corner Detection. CSE252A Lecture 13.
 Announcements Edge and Corner Detection HW3 assigned CSE252A Lecture 13 Efficient Implementation Both, the Box filter and the Gaussian filter are separable: First convolve each row of input image I with
Announcements Edge and Corner Detection HW3 assigned CSE252A Lecture 13 Efficient Implementation Both, the Box filter and the Gaussian filter are separable: First convolve each row of input image I with
Edge detection. Goal: Identify sudden. an image. Ideal: artist s line drawing. object-level knowledge)
") Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image can be encoded in the edges More compact than pixels Ideal: artist
Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image can be encoded in the edges More compact than pixels Ideal: artist
Edge Detection (with a sidelight introduction to linear, associative operators). Images
. Images") Images (we will, eventually, come back to imaging geometry. But, now that we know how images come from the world, we will examine operations on images). Edge Detection (with a sidelight introduction to
Images (we will, eventually, come back to imaging geometry. But, now that we know how images come from the world, we will examine operations on images). Edge Detection (with a sidelight introduction to
Edge and corner detection
 Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edge detection. Gradient-based edge operators
 Edge detection Gradient-based edge operators Prewitt Sobel Roberts Laplacian zero-crossings Canny edge detector Hough transform for detection of straight lines Circle Hough Transform Digital Image Processing:
Edge detection Gradient-based edge operators Prewitt Sobel Roberts Laplacian zero-crossings Canny edge detector Hough transform for detection of straight lines Circle Hough Transform Digital Image Processing:
Edge Detection. EE/CSE 576 Linda Shapiro
 Edge Detection EE/CSE 576 Linda Shapiro Edge Attneave's Cat (1954) 2 Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity illumination discontinuity Edges are caused
Edge Detection EE/CSE 576 Linda Shapiro Edge Attneave's Cat (1954) 2 Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity illumination discontinuity Edges are caused
Edge Detection. Today s reading. Cipolla & Gee on edge detection (available online) From Sandlot Science
 From Sandlot Science") Edge Detection From Sandlot Science Today s reading Cipolla & Gee on edge detection (available online) Project 1a assigned last Friday due this Friday Last time: Cross-correlation Let be the image, be
Edge Detection From Sandlot Science Today s reading Cipolla & Gee on edge detection (available online) Project 1a assigned last Friday due this Friday Last time: Cross-correlation Let be the image, be
Computer Vision I. Announcement. Corners. Edges. Numerical Derivatives f(x) Edge and Corner Detection. CSE252A Lecture 11
 Edge and Corner Detection. CSE252A Lecture 11") Announcement Edge and Corner Detection Slides are posted HW due Friday CSE5A Lecture 11 Edges Corners Edge is Where Change Occurs: 1-D Change is measured by derivative in 1D Numerical Derivatives f(x)
Announcement Edge and Corner Detection Slides are posted HW due Friday CSE5A Lecture 11 Edges Corners Edge is Where Change Occurs: 1-D Change is measured by derivative in 1D Numerical Derivatives f(x)
Prof. Feng Liu. Winter /15/2019
 Prof. Feng Liu Winter 2019 http://www.cs.pdx.edu/~fliu/courses/cs410/ 01/15/2019 Last Time Filter 2 Today More on Filter Feature Detection 3 Filter Re-cap noisy image naïve denoising Gaussian blur better
Prof. Feng Liu Winter 2019 http://www.cs.pdx.edu/~fliu/courses/cs410/ 01/15/2019 Last Time Filter 2 Today More on Filter Feature Detection 3 Filter Re-cap noisy image naïve denoising Gaussian blur better
Lecture 7: Most Common Edge Detectors
 #1 Lecture 7: Most Common Edge Detectors Saad Bedros sbedros@umn.edu Edge Detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the
#1 Lecture 7: Most Common Edge Detectors Saad Bedros sbedros@umn.edu Edge Detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the
Features Points. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
CS 4495 Computer Vision. Linear Filtering 2: Templates, Edges. Aaron Bobick. School of Interactive Computing. Templates/Edges
 CS 4495 Computer Vision Linear Filtering 2: Templates, Edges Aaron Bobick School of Interactive Computing Last time: Convolution Convolution: Flip the filter in both dimensions (right to left, bottom to
CS 4495 Computer Vision Linear Filtering 2: Templates, Edges Aaron Bobick School of Interactive Computing Last time: Convolution Convolution: Flip the filter in both dimensions (right to left, bottom to
Lecture 6: Edge Detection
 #1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
#1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
Edges and Binary Images
 CS 699: Intro to Computer Vision Edges and Binary Images Prof. Adriana Kovashka University of Pittsburgh September 5, 205 Plan for today Edge detection Binary image analysis Homework Due on 9/22, :59pm
CS 699: Intro to Computer Vision Edges and Binary Images Prof. Adriana Kovashka University of Pittsburgh September 5, 205 Plan for today Edge detection Binary image analysis Homework Due on 9/22, :59pm
What is an edge? Paint. Depth discontinuity. Material change. Texture boundary
 EDGES AND TEXTURES The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their
EDGES AND TEXTURES The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their
Generalized Hough Transform, line fitting
 Generalized Hough Transform, line fitting Introduction to Computer Vision CSE 152 Lecture 11-a Announcements Assignment 2: Due today Midterm: Thursday, May 10 in class Non-maximum suppression For every
Generalized Hough Transform, line fitting Introduction to Computer Vision CSE 152 Lecture 11-a Announcements Assignment 2: Due today Midterm: Thursday, May 10 in class Non-maximum suppression For every
Image Processing
 Image Processing 159.731 Canny Edge Detection Report Syed Irfanullah, Azeezullah 00297844 Danh Anh Huynh 02136047 1 Canny Edge Detection INTRODUCTION Edges Edges characterize boundaries and are therefore
Image Processing 159.731 Canny Edge Detection Report Syed Irfanullah, Azeezullah 00297844 Danh Anh Huynh 02136047 1 Canny Edge Detection INTRODUCTION Edges Edges characterize boundaries and are therefore
[ ] Review. Edges and Binary Images. Edge detection. Derivative of Gaussian filter. Image gradient. Tuesday, Sept 16
![[ ] Review. Edges and Binary Images. Edge detection. Derivative of Gaussian filter. Image gradient. Tuesday, Sept 16](/thumbs/89/98496315.jpg "[ ] Review. Edges and Binary Images. Edge detection. Derivative of Gaussian filter. Image gradient. Tuesday, Sept 16") Review Edges and Binary Images Tuesday, Sept 6 Thought question: how could we compute a temporal gradient from video data? What filter is likely to have produced this image output? original filtered output
Review Edges and Binary Images Tuesday, Sept 6 Thought question: how could we compute a temporal gradient from video data? What filter is likely to have produced this image output? original filtered output
Edge Detection Lecture 03 Computer Vision
 Edge Detection Lecture 3 Computer Vision Suggested readings Chapter 5 Linda G. Shapiro and George Stockman, Computer Vision, Upper Saddle River, NJ, Prentice Hall,. Chapter David A. Forsyth and Jean Ponce,
Edge Detection Lecture 3 Computer Vision Suggested readings Chapter 5 Linda G. Shapiro and George Stockman, Computer Vision, Upper Saddle River, NJ, Prentice Hall,. Chapter David A. Forsyth and Jean Ponce,
Edge Detection CSC 767
 Edge Detection CSC 767 Edge detection Goal: Identify sudden changes (discontinuities) in an image Most semantic and shape information from the image can be encoded in the edges More compact than pixels
Edge Detection CSC 767 Edge detection Goal: Identify sudden changes (discontinuities) in an image Most semantic and shape information from the image can be encoded in the edges More compact than pixels
Biomedical Image Analysis. Point, Edge and Line Detection
 Biomedical Image Analysis Point, Edge and Line Detection Contents: Point and line detection Advanced edge detection: Canny Local/regional edge processing Global processing: Hough transform BMIA 15 V. Roth
Biomedical Image Analysis Point, Edge and Line Detection Contents: Point and line detection Advanced edge detection: Canny Local/regional edge processing Global processing: Hough transform BMIA 15 V. Roth
Announcements. Edge Detection. An Isotropic Gaussian. Filters are templates. Assignment 2 on tracking due this Friday Midterm: Tuesday, May 3.
 Announcements Edge Detection Introduction to Computer Vision CSE 152 Lecture 9 Assignment 2 on tracking due this Friday Midterm: Tuesday, May 3. Reading from textbook An Isotropic Gaussian The picture
Announcements Edge Detection Introduction to Computer Vision CSE 152 Lecture 9 Assignment 2 on tracking due this Friday Midterm: Tuesday, May 3. Reading from textbook An Isotropic Gaussian The picture
Line, edge, blob and corner detection
 Line, edge, blob and corner detection Dmitri Melnikov MTAT.03.260 Pattern Recognition and Image Analysis April 5, 2011 1 / 33 Outline 1 Introduction 2 Line detection 3 Edge detection 4 Blob detection 5
Line, edge, blob and corner detection Dmitri Melnikov MTAT.03.260 Pattern Recognition and Image Analysis April 5, 2011 1 / 33 Outline 1 Introduction 2 Line detection 3 Edge detection 4 Blob detection 5
Digital Image Processing. Image Enhancement - Filtering
 Digital Image Processing Image Enhancement - Filtering Derivative Derivative is defined as a rate of change. Discrete Derivative Finite Distance Example Derivatives in 2-dimension Derivatives of Images
Digital Image Processing Image Enhancement - Filtering Derivative Derivative is defined as a rate of change. Discrete Derivative Finite Distance Example Derivatives in 2-dimension Derivatives of Images
CS334: Digital Imaging and Multimedia Edges and Contours. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS334: Digital Imaging and Multimedia Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators From Edges
CS334: Digital Imaging and Multimedia Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators From Edges
Filtering and Edge Detection. Computer Vision I. CSE252A Lecture 10. Announcement
 Filtering and Edge Detection CSE252A Lecture 10 Announcement HW1graded, will be released later today HW2 assigned, due Wed. Nov. 7 1 Image formation: Color Channel k " $ $ # $ I r I g I b % " ' $ ' = (
Filtering and Edge Detection CSE252A Lecture 10 Announcement HW1graded, will be released later today HW2 assigned, due Wed. Nov. 7 1 Image formation: Color Channel k " $ $ # $ I r I g I b % " ' $ ' = (
Filtering Applications & Edge Detection. GV12/3072 Image Processing.
 Filtering Applications & Edge Detection GV12/3072 1 Outline Sampling & Reconstruction Revisited Anti-Aliasing Edges Edge detection Simple edge detector Canny edge detector Performance analysis Hough Transform
Filtering Applications & Edge Detection GV12/3072 1 Outline Sampling & Reconstruction Revisited Anti-Aliasing Edges Edge detection Simple edge detector Canny edge detector Performance analysis Hough Transform
Review of Filtering. Filtering in frequency domain
 Review of Filtering Filtering in frequency domain Can be faster than filtering in spatial domain (for large filters) Can help understand effect of filter Algorithm: 1. Convert image and filter to fft (fft2
Review of Filtering Filtering in frequency domain Can be faster than filtering in spatial domain (for large filters) Can help understand effect of filter Algorithm: 1. Convert image and filter to fft (fft2
Image Processing: Final Exam November 10, :30 10:30
 Image Processing: Final Exam November 10, 2017-8:30 10:30 Student name: Student number: Put your name and student number on all of the papers you hand in (if you take out the staple). There are always
Image Processing: Final Exam November 10, 2017-8:30 10:30 Student name: Student number: Put your name and student number on all of the papers you hand in (if you take out the staple). There are always
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies"
 ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Types of Edges. Why Edge Detection? Types of Edges. Edge Detection. Gradient. Edge Detection
 Why Edge Detection? How can an algorithm extract relevant information from an image that is enables the algorithm to recognize objects? The most important information for the interpretation of an image
Why Edge Detection? How can an algorithm extract relevant information from an image that is enables the algorithm to recognize objects? The most important information for the interpretation of an image
CS534: Introduction to Computer Vision Edges and Contours. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS534: Introduction to Computer Vision Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators Laplacian
CS534: Introduction to Computer Vision Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators Laplacian
Image Analysis. Edge Detection
 Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
Edges and Binary Image Analysis April 12 th, 2018
 4/2/208 Edges and Binary Image Analysis April 2 th, 208 Yong Jae Lee UC Davis Previously Filters allow local image neighborhood to influence our description and features Smoothing to reduce noise Derivatives
4/2/208 Edges and Binary Image Analysis April 2 th, 208 Yong Jae Lee UC Davis Previously Filters allow local image neighborhood to influence our description and features Smoothing to reduce noise Derivatives
Neighborhood operations
 Neighborhood operations Generate an output pixel on the basis of the pixel and its neighbors Often involve the convolution of an image with a filter kernel or mask g ( i, j) = f h = f ( i m, j n) h( m,
Neighborhood operations Generate an output pixel on the basis of the pixel and its neighbors Often involve the convolution of an image with a filter kernel or mask g ( i, j) = f h = f ( i m, j n) h( m,
Edge detection. Winter in Kraków photographed by Marcin Ryczek
 Edge detection Winter in Kraków photographed by Marcin Ryczek Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image
Edge detection Winter in Kraków photographed by Marcin Ryczek Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Image gradients and edges
 Image gradients and edges Thurs Sept 3 Prof. Kristen Grauman UT-Austin Last time Various models for image noise Linear filters and convolution useful for Image smoothing, remov ing noise Box filter Gaussian
Image gradients and edges Thurs Sept 3 Prof. Kristen Grauman UT-Austin Last time Various models for image noise Linear filters and convolution useful for Image smoothing, remov ing noise Box filter Gaussian
Image features. Image Features
 Image features Image features, such as edges and interest points, provide rich information on the image content. They correspond to local regions in the image and are fundamental in many applications in
Image features Image features, such as edges and interest points, provide rich information on the image content. They correspond to local regions in the image and are fundamental in many applications in
Filtering Images. Contents
 Image Processing and Data Visualization with MATLAB Filtering Images Hansrudi Noser June 8-9, 010 UZH, Multimedia and Robotics Summer School Noise Smoothing Filters Sigmoid Filters Gradient Filters Contents
Image Processing and Data Visualization with MATLAB Filtering Images Hansrudi Noser June 8-9, 010 UZH, Multimedia and Robotics Summer School Noise Smoothing Filters Sigmoid Filters Gradient Filters Contents
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
CHAPTER 1 Introduction 1. CHAPTER 2 Images, Sampling and Frequency Domain Processing 37
 Extended Contents List Preface... xi About the authors... xvii CHAPTER 1 Introduction 1 1.1 Overview... 1 1.2 Human and Computer Vision... 2 1.3 The Human Vision System... 4 1.3.1 The Eye... 5 1.3.2 The
Extended Contents List Preface... xi About the authors... xvii CHAPTER 1 Introduction 1 1.1 Overview... 1 1.2 Human and Computer Vision... 2 1.3 The Human Vision System... 4 1.3.1 The Eye... 5 1.3.2 The
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong)
") Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Edge Detection. CSC320: Introduction to Visual Computing Michael Guerzhoy. René Magritte, Decalcomania. Many slides from Derek Hoiem, Robert Collins
 Edge Detection René Magritte, Decalcomania Many slides from Derek Hoiem, Robert Collins CSC320: Introduction to Visual Computing Michael Guerzhoy Discontinuities in Intensity Source: Robert Collins Origin
Edge Detection René Magritte, Decalcomania Many slides from Derek Hoiem, Robert Collins CSC320: Introduction to Visual Computing Michael Guerzhoy Discontinuities in Intensity Source: Robert Collins Origin
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Image gradients and edges April 11 th, 2017
 4//27 Image gradients and edges April th, 27 Yong Jae Lee UC Davis PS due this Friday Announcements Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
4//27 Image gradients and edges April th, 27 Yong Jae Lee UC Davis PS due this Friday Announcements Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
Local invariant features
 Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Local Image preprocessing (cont d)
") Local Image preprocessing (cont d) 1 Outline - Edge detectors - Corner detectors - Reading: textbook 5.3.1-5.3.5 and 5.3.10 2 What are edges? Edges correspond to relevant features in the image. An edge
Local Image preprocessing (cont d) 1 Outline - Edge detectors - Corner detectors - Reading: textbook 5.3.1-5.3.5 and 5.3.10 2 What are edges? Edges correspond to relevant features in the image. An edge
Low-level Vision Processing Algorithms Speaker: Ito, Dang Supporter: Ishii, Toyama and Y. Murakami
 Low-level Vision Processing Algorithms Speaker: Ito, Dang Supporter: Ishii, Toyama and Y. Murakami Adaptive Systems Lab The University of Aizu Overview Introduction What is Vision Processing? Basic Knowledge
Low-level Vision Processing Algorithms Speaker: Ito, Dang Supporter: Ishii, Toyama and Y. Murakami Adaptive Systems Lab The University of Aizu Overview Introduction What is Vision Processing? Basic Knowledge
Image gradients and edges April 10 th, 2018
 Image gradients and edges April th, 28 Yong Jae Lee UC Davis PS due this Friday Announcements Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
Image gradients and edges April th, 28 Yong Jae Lee UC Davis PS due this Friday Announcements Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
Ulrik Söderström 16 Feb Image Processing. Segmentation
 Ulrik Söderström ulrik.soderstrom@tfe.umu.se 16 Feb 2011 Image Processing Segmentation What is Image Segmentation? To be able to extract information from an image it is common to subdivide it into background
Ulrik Söderström ulrik.soderstrom@tfe.umu.se 16 Feb 2011 Image Processing Segmentation What is Image Segmentation? To be able to extract information from an image it is common to subdivide it into background
Introduction. Introduction. Related Research. SIFT method. SIFT method. Distinctive Image Features from Scale-Invariant. Scale.
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Edge Detection. CS664 Computer Vision. 3. Edges. Several Causes of Edges. Detecting Edges. Finite Differences. The Gradient
 Edge Detection CS664 Computer Vision. Edges Convert a gray or color image into set of curves Represented as binary image Capture properties of shapes Dan Huttenlocher Several Causes of Edges Sudden changes
Edge Detection CS664 Computer Vision. Edges Convert a gray or color image into set of curves Represented as binary image Capture properties of shapes Dan Huttenlocher Several Causes of Edges Sudden changes
Edge and Texture. CS 554 Computer Vision Pinar Duygulu Bilkent University
 Edge and Texture CS 554 Computer Vision Pinar Duygulu Bilkent University Filters for features Previously, thinking of filtering as a way to remove or reduce noise Now, consider how filters will allow us
Edge and Texture CS 554 Computer Vision Pinar Duygulu Bilkent University Filters for features Previously, thinking of filtering as a way to remove or reduce noise Now, consider how filters will allow us
Edge detection. Winter in Kraków photographed by Marcin Ryczek
 Edge detection Winter in Kraków photographed by Marcin Ryczek Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, edges carry most of the semantic and shape information
Edge detection Winter in Kraków photographed by Marcin Ryczek Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, edges carry most of the semantic and shape information
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Designing Applications that See Lecture 3: Image Processing
 stanford hci group / cs377s Designing Applications that See Lecture 3: Image Processing Dan Maynes-Aminzade 5 January 008 Designing Applications that See http://cs377s.stanford.edu Reminders Register on
stanford hci group / cs377s Designing Applications that See Lecture 3: Image Processing Dan Maynes-Aminzade 5 January 008 Designing Applications that See http://cs377s.stanford.edu Reminders Register on
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
Advanced Video Content Analysis and Video Compression (5LSH0), Module 4
, Module 4") Advanced Video Content Analysis and Video Compression (5LSH0), Module 4 Visual feature extraction Part I: Color and texture analysis Sveta Zinger Video Coding and Architectures Research group, TU/e ( s.zinger@tue.nl
Advanced Video Content Analysis and Video Compression (5LSH0), Module 4 Visual feature extraction Part I: Color and texture analysis Sveta Zinger Video Coding and Architectures Research group, TU/e ( s.zinger@tue.nl
An edge is not a line... Edge Detection. Finding lines in an image. Finding lines in an image. How can we detect lines?
 Edge Detection An edge is not a line... original image Cann edge detector Compute image derivatives if gradient magnitude > τ and the value is a local maimum along gradient direction piel is an edge candidate
Edge Detection An edge is not a line... original image Cann edge detector Compute image derivatives if gradient magnitude > τ and the value is a local maimum along gradient direction piel is an edge candidate
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
IMAGE PROCESSING >FILTERS AND EDGE DETECTION FOR COLOR IMAGES UTRECHT UNIVERSITY RONALD POPPE
 IMAGE PROCESSING >FILTERS AND EDGE DETECTION FOR COLOR IMAGES UTRECHT UNIVERSITY RONALD POPPE OUTLINE Filters for color images Edge detection for color images Canny edge detection FILTERS FOR COLOR IMAGES
IMAGE PROCESSING >FILTERS AND EDGE DETECTION FOR COLOR IMAGES UTRECHT UNIVERSITY RONALD POPPE OUTLINE Filters for color images Edge detection for color images Canny edge detection FILTERS FOR COLOR IMAGES
Broad field that includes low-level operations as well as complex high-level algorithms
 Image processing About Broad field that includes low-level operations as well as complex high-level algorithms Low-level image processing Computer vision Computational photography Several procedures and
Image processing About Broad field that includes low-level operations as well as complex high-level algorithms Low-level image processing Computer vision Computational photography Several procedures and
Comparison between Various Edge Detection Methods on Satellite Image
 Comparison between Various Edge Detection Methods on Satellite Image H.S. Bhadauria 1, Annapurna Singh 2, Anuj Kumar 3 Govind Ballabh Pant Engineering College ( Pauri garhwal),computer Science and Engineering
Comparison between Various Edge Detection Methods on Satellite Image H.S. Bhadauria 1, Annapurna Singh 2, Anuj Kumar 3 Govind Ballabh Pant Engineering College ( Pauri garhwal),computer Science and Engineering
Noise Model. Important Noise Probability Density Functions (Cont.) Important Noise Probability Density Functions
 Important Noise Probability Density Functions") Others -- Noise Removal Techniques -- Edge Detection Techniques -- Geometric Operations -- Color Image Processing -- Color Spaces Xiaojun Qi Noise Model The principal sources of noise in digital images
Others -- Noise Removal Techniques -- Edge Detection Techniques -- Geometric Operations -- Color Image Processing -- Color Spaces Xiaojun Qi Noise Model The principal sources of noise in digital images
Edge detection. Stefano Ferrari. Università degli Studi di Milano Elaborazione delle immagini (Image processing I)
") Edge detection Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini (Image processing I) academic year 2011 2012 Image segmentation Several image processing
Edge detection Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini (Image processing I) academic year 2011 2012 Image segmentation Several image processing
Lecture: Edge Detection
 CMPUT 299 Winter 2007 Lecture: Edge Detection Irene Cheng Overview. What is a pixel in an image? 2. How does Photoshop, + human assistance, detect an edge in a picture/photograph? 3. Behind Photoshop -
CMPUT 299 Winter 2007 Lecture: Edge Detection Irene Cheng Overview. What is a pixel in an image? 2. How does Photoshop, + human assistance, detect an edge in a picture/photograph? 3. Behind Photoshop -
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
DIGITAL IMAGE PROCESSING
 The image part with relationship ID rid2 was not found in the file. DIGITAL IMAGE PROCESSING Lecture 6 Wavelets (cont), Lines and edges Tammy Riklin Raviv Electrical and Computer Engineering Ben-Gurion
The image part with relationship ID rid2 was not found in the file. DIGITAL IMAGE PROCESSING Lecture 6 Wavelets (cont), Lines and edges Tammy Riklin Raviv Electrical and Computer Engineering Ben-Gurion
Previously. Edge detection. Today. Thresholding. Gradients -> edges 2/1/2011. Edges and Binary Image Analysis
 2//20 Previously Edges and Binary Image Analysis Mon, Jan 3 Prof. Kristen Grauman UT-Austin Filters allow local image neighborhood to influence our description and features Smoothing to reduce noise Derivatives
2//20 Previously Edges and Binary Image Analysis Mon, Jan 3 Prof. Kristen Grauman UT-Austin Filters allow local image neighborhood to influence our description and features Smoothing to reduce noise Derivatives
School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
Feature Detectors and Descriptors: Corners, Lines, etc.
 Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Schools of thoughts on texture
 Cameras Images Images Edges Talked about images being continuous (if you blur them, then you can compute derivatives and such). Two paths: Edges something useful Or Images something besides edges. Images
Cameras Images Images Edges Talked about images being continuous (if you blur them, then you can compute derivatives and such). Two paths: Edges something useful Or Images something besides edges. Images
Announcements. Hough Transform [ Patented 1962 ] Generalized Hough Transform, line fitting. Assignment 2: Due today Midterm: Thursday, May 5 in class
![Announcements. Hough Transform [ Patented 1962 ] Generalized Hough Transform, line fitting. Assignment 2: Due today Midterm: Thursday, May 5 in class](/thumbs/85/92905127.jpg "Announcements. Hough Transform [ Patented 1962 ] Generalized Hough Transform, line fitting. Assignment 2: Due today Midterm: Thursday, May 5 in class") Announcements Generalized Hough Transform, line fitting Assignment 2: Due today Midterm: Thursday, May 5 in class Introduction to Computer Vision CSE 152 Lecture 11a What is region like if: 1. λ 1 = 0?
Announcements Generalized Hough Transform, line fitting Assignment 2: Due today Midterm: Thursday, May 5 in class Introduction to Computer Vision CSE 152 Lecture 11a What is region like if: 1. λ 1 = 0?
EN1610 Image Understanding Lab # 3: Edges
 EN1610 Image Understanding Lab # 3: Edges The goal of this fourth lab is to ˆ Understanding what are edges, and different ways to detect them ˆ Understand different types of edge detectors - intensity,
EN1610 Image Understanding Lab # 3: Edges The goal of this fourth lab is to ˆ Understanding what are edges, and different ways to detect them ˆ Understand different types of edge detectors - intensity,
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
2D Image Processing Feature Descriptors
 2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
Feature Extraction and Image Processing, 2 nd Edition. Contents. Preface
 , 2 nd Edition Preface ix 1 Introduction 1 1.1 Overview 1 1.2 Human and Computer Vision 1 1.3 The Human Vision System 3 1.3.1 The Eye 4 1.3.2 The Neural System 7 1.3.3 Processing 7 1.4 Computer Vision
, 2 nd Edition Preface ix 1 Introduction 1 1.1 Overview 1 1.2 Human and Computer Vision 1 1.3 The Human Vision System 3 1.3.1 The Eye 4 1.3.2 The Neural System 7 1.3.3 Processing 7 1.4 Computer Vision
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 09 130219 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Feature Descriptors Feature Matching Feature
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 09 130219 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Feature Descriptors Feature Matching Feature
Color, Edge and Texture
 EECS 432-Advanced Computer Vision Notes Series 4 Color, Edge and Texture Ying Wu Electrical Engineering & Computer Science Northwestern University Evanston, IL 628 yingwu@ece.northwestern.edu Contents
EECS 432-Advanced Computer Vision Notes Series 4 Color, Edge and Texture Ying Wu Electrical Engineering & Computer Science Northwestern University Evanston, IL 628 yingwu@ece.northwestern.edu Contents
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Perception. Autonomous Mobile Robots. Sensors Vision Uncertainties, Line extraction from laser scans. Autonomous Systems Lab. Zürich.
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
Image Analysis. Edge Detection
 Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spatial Domain Filtering http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background Intensity
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spatial Domain Filtering http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background Intensity
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
Lecture 9: Hough Transform and Thresholding base Segmentation
 #1 Lecture 9: Hough Transform and Thresholding base Segmentation Saad Bedros sbedros@umn.edu Hough Transform Robust method to find a shape in an image Shape can be described in parametric form A voting
#1 Lecture 9: Hough Transform and Thresholding base Segmentation Saad Bedros sbedros@umn.edu Hough Transform Robust method to find a shape in an image Shape can be described in parametric form A voting
Filtering and Enhancing Images
 KECE471 Computer Vision Filtering and Enhancing Images Chang-Su Kim Chapter 5, Computer Vision by Shapiro and Stockman Note: Some figures and contents in the lecture notes of Dr. Stockman are used partly.
KECE471 Computer Vision Filtering and Enhancing Images Chang-Su Kim Chapter 5, Computer Vision by Shapiro and Stockman Note: Some figures and contents in the lecture notes of Dr. Stockman are used partly.
Image Processing Fundamentals. Nicolas Vazquez Principal Software Engineer National Instruments
 Image Processing Fundamentals Nicolas Vazquez Principal Software Engineer National Instruments Agenda Objectives and Motivations Enhancing Images Checking for Presence Locating Parts Measuring Features
Image Processing Fundamentals Nicolas Vazquez Principal Software Engineer National Instruments Agenda Objectives and Motivations Enhancing Images Checking for Presence Locating Parts Measuring Features
PA2 Introduction to Tracking. Connected Components. Moving Object Detection. Pixel Grouping. After Pixel Grouping 2/19/17. Any questions?
 /19/17 PA Introduction to Tracking Any questions? Yes, its due Monday. CS 510 Lecture 1 February 15, 017 Moving Object Detection Assuming a still camera Two algorithms: Mixture of Gaussians (Stauffer Grimson)
/19/17 PA Introduction to Tracking Any questions? Yes, its due Monday. CS 510 Lecture 1 February 15, 017 Moving Object Detection Assuming a still camera Two algorithms: Mixture of Gaussians (Stauffer Grimson)