Image gradients and edges
|
|
|
- Annabel Rose
- 5 years ago
- Views:
Transcription
1 Image gradients and edges Thurs Sept 3 Prof. Kristen Grauman UT-Austin Last time Various models for image noise Linear filters and convolution useful for Image smoothing, remov ing noise Box filter Gaussian filter Impact of scale / width of smoothing filter Separable filters more efficient Median filter: a non-linear filter, edge-preserving Image filtering Compute a function of the local neighborhood at each pixel in the image Function specif ied by a f ilter or mask say ing how to combine v alues f rom neighbors. Uses of filtering: Enhance an image (denoise, resize, etc) Extract inf ormation (texture, edges, etc) Detect patterns (template matching) Today Adapted from Derek Hoiem 1
2 Edge detection Goal: map image f rom 2d array of pixels to a set of curv es or line segments or contours. Why? Figure from J. Shotton et al., PAMI 2007 Main idea: look f or strong gradients, post-process What causes an edge? Reflectance change: appearance information, texture Depth discontinuity: object boundary Cast shadows Change in surface orientation: shape Edges/gradients and invariance 2


 f ( x, y) f ( x, y) lim x 0 For discrete data, we can")

3 Derivatives and edges An edge is a place of rapid change in the image intensity function. image intensity function (along horizontal scanline) first derivative edges correspond to extrema of deriv ativ e Source: L. Lazebnik Derivatives with convolution For 2D f unction, f (x,y), the partial deriv ativ e is: f ( x, y) f ( x, y) f ( x, y) lim x 0 For discrete data, we can approximate using f inite dif f erences: f ( x, y) f ( x 1, y) f ( x, y) x 1 To implement abov e as conv olution, what would be the associated f ilter? Partial derivatives of an image f ( x, y) x -1 1 f ( x, y) y -1 1? or 1-1 Which shows changes with respect to x? (showing filters for correlation) 3


4 Assorted finite difference filters >> My = fspec ial( s obel ); >> outim = im filter (doub le(im), My) ; >> image sc(ou tim); >> color map g ray; Image gradient The gradient of an image: The gradient points in the direction of most rapid change in intensity The gradient direction (orientation of edge normal) is given by: The edge strength is given by the gradient magnitude Slide credit Steve Seitz Effects of noise Consider a single row or column of the image Plotting intensity as a function of position gives a signal Where is the edge? Slide credit Steve Seitz 4
 h I ( g h) 0.0030 0.0133 0.0219 0.0133 0.0030 0.0133 0.0596 0.0983 0.0596 0.0133 0.0219 0.0983 0.1621 0.0983 0.0219 0.0133 0.0596 0.0983 0.0596 0.0133 0.0030 0.0133 0.0219 0.0133 0.0030 1 1 5")
5 Solution: smooth first Where is the edge? Derivative theorem of convolution Dif f erentiation property of convolution. Slide credit Steve Seitz Derivative of Gaussian filters ( I g) h I ( g h)



6 Derivative of Gaussian filters x-direction y-direction Source: L. Lazebnik Laplacian of Gaussian Consider Laplacian of Gaussian operator Where is the edge? Slide credit: Steve Seitz 2D edge detection filters Laplacian of Gaussian Gaussian deriv ativ e of Gaussian is the Laplacian operator: Slide credit: Steve Seitz 6








7 Smoothing with a Gaussian Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of smoothing. Effect of σ on derivatives σ = 1 pixel σ = 3 pixels The apparent structures differ depending on Gaussian s scale parameter. Larger values: larger scale edges detected Smaller values: finer features detected So, what scale to choose? It depends what we re looking f or. 7

8 Smoothing Values positive Mask properties Sum to 1 constant regions same as input Amount of smoothing proportional to mask size Remove high-frequency components; low-pass filter Derivatives signs used to get high response in regions of high contrast Sum to no response in constant regions High absolute value at points of high contrast Seam carving: main idea Content-aware resizing Intuition: Preserve the most interesting content Pref er to remov e pixels with low gradient energy To reduce or increase size in one dimension, remove irregularly shaped seams Optimal solution v ia dy namic programming. Seam carving: main idea Energy( f ) Want to remove seams w here they w on t be very noticeable: Measure energy as gradient magnitude Choose seam based on minimum total energy path across image, subject to 8-connectedness. 8
9 Seam carving: algorithm s1 s2 s3 s4 s5 Energy( f ) Let a vertical seam s consist of h positions that form an 8-connected path. Let the cost of a seam be: Cost(s) Optimal seam minimizes this cost: s* min Cost( s) Compute it efficiently w ith dynamic programming. h i1 Energy( f ( )) s s i Seam carving: algorithm Compute the cumulativ e minimum energy f or all possible connected seams at each entry (i,j): M( i, j) Energy ( i, j) min M( i 1, j 1), M( i 1, j), M( i 1, j 1) row i-1 row i j-1 j j+1 j Energy matrix (gradient magnitude) M matrix: cumulativ e min energy (for v ertical seams) Then, min v alue in last row of M indicates end of the minimal connected v ertical seam. Backtrack up f rom there, selecting min of 3 abov e in M. Example M( i, j) Energy ( i, j) min M( i 1, j 1), M( i 1, j), M( i 1, j 1) Energy matrix (gradient magnitude) M matrix (for v ertical seams) 9
10 Example M( i, j) Energy ( i, j) min M( i 1, j 1), M( i 1, j), M( i 1, j 1) Energy matrix (gradient magnitude) M matrix (for v ertical seams) Other notes on seam carving Analogous procedure for horizontal seams Can also insert seams to increase size of image in either dimension Duplicate optimal seam, av eraged with neighbors Other energy functions may be plugged in E.g., color-based, interactiv e, Can use combination of vertical and horizontal seams Gradients -> edges Primary edge detection steps: 1. Smoothing: suppress noise 2. Edge enhancement: filter for contrast 3. Edge localization Determine w hich local maxima from filter output are actually edges vs. noise Threshold, Thin 10

11 Thresholding Choose a threshold value t Set any pixels less than t to zero (off) Set any pixels greater than or equal to t to one (on) Thresholding gradient with a higher threshold Canny edge detector Filter image with deriv ativ e of Gaussian Find magnitude and orientation of gradient Non-maximum suppression: Thin wide ridges down to single pixel width Linking and thresholding (hysteresis): Def ine two thresholds: low and high Use the high threshold to start edge curv es and the low threshold to continue them MATLAB: edge(image, canny ); >>help edge Source: D. Lowe, L. Fei-Fei 11

12 The Canny edge detector original image (Lena) Slide credit: Steve Seitz The Canny edge detector thresholding The Canny edge detector How to turn these thick regions of the gradient into curves? thresholding 12


13 Non-maximum suppression Check if pixel is local maximum along gradient direction, select single max across width of the edge requires checking interpolated pixels p and r The Canny edge detector Problem: pixels along this edge didn t surv iv e the thresholding thinning (non-maximum suppression) Hysteresis thresholding Use a high threshold to start edge curves, and a low threshold to continue them. Source: Steve Seitz 13

14 Hysteresis thresholding original image high threshold (strong edges) low threshold (weak edges) hysteresis threshold Source: L. Fei-Fei Hysteresis thresholding original image high threshold (strong edges) low threshold (weak edges) hysteresis threshold Source: L. Fei-Fei Recap: Canny edge detector Filter image with deriv ativ e of Gaussian Find magnitude and orientation of gradient Non-maximum suppression: Thin wide ridges down to single pixel width Linking and thresholding (hysteresis): Def ine two thresholds: low and high Use the high threshold to start edge curv es and the low threshold to continue them MATLAB: edge(image, canny ); >>help edge Source: D. Lowe, L. Fei-Fei 14









15 Low-level edges vs. perceived contours Background Texture Shadows Low-level edges vs. perceived contours image human segmentation gradient magnitude Berkeley segmentation database: Res earc h/projects/cs/vision/gr ouping/segbench/ Source: L. Lazebnik Learn from humans which combination of features is most indicative of a good contour? [D. Martin et al. PAMI 2004] Human-marked segment boundaries 15


![PAMI 2004] Kristen Grauman, UT-Austin PAMI 2004] Kristen](/docs-images/94/118917407/images/16-2.jpg "Grauman, UT-Austin [D.")
![PAMI 2004] Kristen Grauman, UT-Austin 16](/docs-images/94/118917407/images/16-3.jpg)
16 What features are responsible for perceived edges? Feature profiles (oriented energy, brightness, color, and texture gradients) along the patch s horizontal diameter [D. Martin et al. PAMI 2004] Kristen Grauman, UT-Austin What features are responsible for perceived edges? Feature profiles (oriented energy, brightness, color, and texture gradients) along the patch s horizontal diameter [D. Martin et al. PAMI 2004] Kristen Grauman, UT-Austin [D. Martin et al. PAMI 2004] Kristen Grauman, UT-Austin 16


17 Contour Detection Canny+opt thresholds Canny Prewitt, Sobel, Roberts Human agreement Learned with combined features UC Berkeley Source: Jitendra Malik: -talks-ptrs.html Computer Vision Group Recall: image filtering Compute a function of the local neighborhood at each pixel in the image Function specif ied by a f ilter or mask say ing how to combine v alues f rom neighbors. Uses of filtering: Enhance an image (denoise, resize, etc) Extract inf ormation (texture, edges, etc) Detect patterns (template matching) Adapted from Derek Hoiem Filters for features Map raw pixels to an intermediate representation that w ill be used for subsequent processing Goal: reduce amount of data, discard redundancy, preserve w hat s useful 17

 in the image.")
 A toy example Template")
18 Template matching Filters as templates: Note that f ilters look like the ef f ects they are intended to f ind --- matched f ilters Use normalized cross-correlation score to f ind a giv en pattern (template) in the image. Normalization needed to control f or relativ e brightnesses. Template matching Scene Template (mask) A toy example Template matching Detected template Correlation map 18

19 Recap: Mask properties Smoothing Values positive Sum to 1 constant regions same as input Amount of smoothing proportional to mask size Remove high-frequency components; low-pass filter Derivatives Opposite signs used to get high response in regions of high contrast Sum to 0 no response in constant regions High absolute value at points of high contrast Filters act as templates Highest response for regions that look the most like the filter Dot product as correlation Figure from Belongie et al. Chamfer distance Av erage distance to nearest f eature I Set of points in image T Set of points on (shif ted) template d I (t) Minimum distance between point t and some point in I 19
20 Chamfer distance Chamfer distance Av erage distance to nearest f eature How is the measure different than just filtering with a mask having the shape points? How expensive is a naïve implementation? Edge image Distance transform Image features (2D) Distance Transform Distance Transform is a function D() that for each image pixel p assigns a non-negative number D( p) corresponding to distance from p to the nearest feature in the image I Features could be edge points, foreground points, Source: Yuri Boykov 20


 >> help bwdist")


21 Distance transform original edges distance transform Value at (x,y) tells how far that position is from the nearest edge point (or other binary mage structure) >> help bwdist Distance transform (1D) // 0 if j is in P, infinity otherwise Adapted from D. Huttenlocher Distance Transform (2D) Adapted from D. Huttenlocher 21

22 Chamfer distance Av erage distance to nearest f eature Edge image Distance transform image Chamfer distance Edge image Distance transform image Fig from D. Gavrila, DAGM 1999 Chamfer distance: properties Sensitive to scale and rotation Tolerant of small shape changes, clutter Need large number of template shapes Inexpensive w ay to match shapes 22



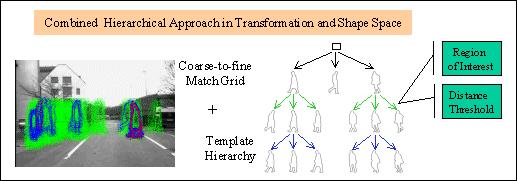
23 Chamfer matching system Gavrila et al. Chamfer matching system Gavrila et al. Chamfer matching system Gavrila et al. 23
24 Summary Image gradients Seam carving gradients as energy Gradients edges and contours Template matching Image patch as a filter Chamfer matching Distance transf orm Coming up A1 out, due in 2 weeks Tues: Binary image analysis Guest Lecture : Dr. Danna Gurari Thurs: Images/videos and text Guest Lecture: Prof. Ray Mooney 24
Image gradients and edges April 11 th, 2017
 4//27 Image gradients and edges April th, 27 Yong Jae Lee UC Davis PS due this Friday Announcements Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
4//27 Image gradients and edges April th, 27 Yong Jae Lee UC Davis PS due this Friday Announcements Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
Image gradients and edges April 10 th, 2018
 Image gradients and edges April th, 28 Yong Jae Lee UC Davis PS due this Friday Announcements Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
Image gradients and edges April th, 28 Yong Jae Lee UC Davis PS due this Friday Announcements Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
Edges and Binary Image Analysis. Thurs Jan 26 Kristen Grauman UT Austin. Today. Edge detection and matching
 /25/207 Edges and Binary Image Analysis Thurs Jan 26 Kristen Grauman UT Austin Today Edge detection and matching process the image gradient to find curves/contours comparing contours Binary image analysis
/25/207 Edges and Binary Image Analysis Thurs Jan 26 Kristen Grauman UT Austin Today Edge detection and matching process the image gradient to find curves/contours comparing contours Binary image analysis
Image gradients and edges
 Image gradients and edges April 7 th, 2015 Yong Jae Lee UC Davis Announcements PS0 due this Friday Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
Image gradients and edges April 7 th, 2015 Yong Jae Lee UC Davis Announcements PS0 due this Friday Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
Previously. Edge detection. Today. Thresholding. Gradients -> edges 2/1/2011. Edges and Binary Image Analysis
 2//20 Previously Edges and Binary Image Analysis Mon, Jan 3 Prof. Kristen Grauman UT-Austin Filters allow local image neighborhood to influence our description and features Smoothing to reduce noise Derivatives
2//20 Previously Edges and Binary Image Analysis Mon, Jan 3 Prof. Kristen Grauman UT-Austin Filters allow local image neighborhood to influence our description and features Smoothing to reduce noise Derivatives
Edges and Binary Image Analysis April 12 th, 2018
 4/2/208 Edges and Binary Image Analysis April 2 th, 208 Yong Jae Lee UC Davis Previously Filters allow local image neighborhood to influence our description and features Smoothing to reduce noise Derivatives
4/2/208 Edges and Binary Image Analysis April 2 th, 208 Yong Jae Lee UC Davis Previously Filters allow local image neighborhood to influence our description and features Smoothing to reduce noise Derivatives
Edge and Texture. CS 554 Computer Vision Pinar Duygulu Bilkent University
 Edge and Texture CS 554 Computer Vision Pinar Duygulu Bilkent University Filters for features Previously, thinking of filtering as a way to remove or reduce noise Now, consider how filters will allow us
Edge and Texture CS 554 Computer Vision Pinar Duygulu Bilkent University Filters for features Previously, thinking of filtering as a way to remove or reduce noise Now, consider how filters will allow us
CS 4495 Computer Vision. Linear Filtering 2: Templates, Edges. Aaron Bobick. School of Interactive Computing. Templates/Edges
 CS 4495 Computer Vision Linear Filtering 2: Templates, Edges Aaron Bobick School of Interactive Computing Last time: Convolution Convolution: Flip the filter in both dimensions (right to left, bottom to
CS 4495 Computer Vision Linear Filtering 2: Templates, Edges Aaron Bobick School of Interactive Computing Last time: Convolution Convolution: Flip the filter in both dimensions (right to left, bottom to
Edge Detection CSC 767
 Edge Detection CSC 767 Edge detection Goal: Identify sudden changes (discontinuities) in an image Most semantic and shape information from the image can be encoded in the edges More compact than pixels
Edge Detection CSC 767 Edge detection Goal: Identify sudden changes (discontinuities) in an image Most semantic and shape information from the image can be encoded in the edges More compact than pixels
Edge detection. Goal: Identify sudden. an image. Ideal: artist s line drawing. object-level knowledge)
") Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image can be encoded in the edges More compact than pixels Ideal: artist
Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image can be encoded in the edges More compact than pixels Ideal: artist
Edges and Binary Images
 CS 699: Intro to Computer Vision Edges and Binary Images Prof. Adriana Kovashka University of Pittsburgh September 5, 205 Plan for today Edge detection Binary image analysis Homework Due on 9/22, :59pm
CS 699: Intro to Computer Vision Edges and Binary Images Prof. Adriana Kovashka University of Pittsburgh September 5, 205 Plan for today Edge detection Binary image analysis Homework Due on 9/22, :59pm
[ ] Review. Edges and Binary Images. Edge detection. Derivative of Gaussian filter. Image gradient. Tuesday, Sept 16
![[ ] Review. Edges and Binary Images. Edge detection. Derivative of Gaussian filter. Image gradient. Tuesday, Sept 16](/thumbs/89/98496315.jpg "[ ] Review. Edges and Binary Images. Edge detection. Derivative of Gaussian filter. Image gradient. Tuesday, Sept 16") Review Edges and Binary Images Tuesday, Sept 6 Thought question: how could we compute a temporal gradient from video data? What filter is likely to have produced this image output? original filtered output
Review Edges and Binary Images Tuesday, Sept 6 Thought question: how could we compute a temporal gradient from video data? What filter is likely to have produced this image output? original filtered output
Edge detection. Winter in Kraków photographed by Marcin Ryczek
 Edge detection Winter in Kraków photographed by Marcin Ryczek Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image
Edge detection Winter in Kraków photographed by Marcin Ryczek Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image
Edge detection. Winter in Kraków photographed by Marcin Ryczek
 Edge detection Winter in Kraków photographed by Marcin Ryczek Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, edges carry most of the semantic and shape information
Edge detection Winter in Kraków photographed by Marcin Ryczek Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, edges carry most of the semantic and shape information
Prof. Feng Liu. Winter /15/2019
 Prof. Feng Liu Winter 2019 http://www.cs.pdx.edu/~fliu/courses/cs410/ 01/15/2019 Last Time Filter 2 Today More on Filter Feature Detection 3 Filter Re-cap noisy image naïve denoising Gaussian blur better
Prof. Feng Liu Winter 2019 http://www.cs.pdx.edu/~fliu/courses/cs410/ 01/15/2019 Last Time Filter 2 Today More on Filter Feature Detection 3 Filter Re-cap noisy image naïve denoising Gaussian blur better
Review of Filtering. Filtering in frequency domain
 Review of Filtering Filtering in frequency domain Can be faster than filtering in spatial domain (for large filters) Can help understand effect of filter Algorithm: 1. Convert image and filter to fft (fft2
Review of Filtering Filtering in frequency domain Can be faster than filtering in spatial domain (for large filters) Can help understand effect of filter Algorithm: 1. Convert image and filter to fft (fft2
Edge and corner detection
 Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edge Detection. Computer Vision Shiv Ram Dubey, IIIT Sri City
 Edge Detection Computer Vision Shiv Ram Dubey, IIIT Sri City Previous two classes: Image Filtering Spatial domain Smoothing, sharpening, measuring texture * = FFT FFT Inverse FFT = Frequency domain Denoising,
Edge Detection Computer Vision Shiv Ram Dubey, IIIT Sri City Previous two classes: Image Filtering Spatial domain Smoothing, sharpening, measuring texture * = FFT FFT Inverse FFT = Frequency domain Denoising,
Edge Detection. CSC320: Introduction to Visual Computing Michael Guerzhoy. René Magritte, Decalcomania. Many slides from Derek Hoiem, Robert Collins
 Edge Detection René Magritte, Decalcomania Many slides from Derek Hoiem, Robert Collins CSC320: Introduction to Visual Computing Michael Guerzhoy Discontinuities in Intensity Source: Robert Collins Origin
Edge Detection René Magritte, Decalcomania Many slides from Derek Hoiem, Robert Collins CSC320: Introduction to Visual Computing Michael Guerzhoy Discontinuities in Intensity Source: Robert Collins Origin
Lecture 6: Edge Detection
 #1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
#1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
What is an edge? Paint. Depth discontinuity. Material change. Texture boundary
 EDGES AND TEXTURES The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their
EDGES AND TEXTURES The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their
CS4670: Computer Vision Noah Snavely
 CS4670: Computer Vision Noah Snavely Lecture 2: Edge detection From Sandlot Science Announcements Project 1 released, due Friday, September 7 1 Edge detection Convert a 2D image into a set of curves Extracts
CS4670: Computer Vision Noah Snavely Lecture 2: Edge detection From Sandlot Science Announcements Project 1 released, due Friday, September 7 1 Edge detection Convert a 2D image into a set of curves Extracts
DIGITAL IMAGE PROCESSING
 The image part with relationship ID rid2 was not found in the file. DIGITAL IMAGE PROCESSING Lecture 6 Wavelets (cont), Lines and edges Tammy Riklin Raviv Electrical and Computer Engineering Ben-Gurion
The image part with relationship ID rid2 was not found in the file. DIGITAL IMAGE PROCESSING Lecture 6 Wavelets (cont), Lines and edges Tammy Riklin Raviv Electrical and Computer Engineering Ben-Gurion
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 2: Edge detection From Sandlot Science Announcements Project 1 (Hybrid Images) is now on the course webpage (see Projects link) Due Wednesday, Feb 15, by 11:59pm
CS5670: Computer Vision Noah Snavely Lecture 2: Edge detection From Sandlot Science Announcements Project 1 (Hybrid Images) is now on the course webpage (see Projects link) Due Wednesday, Feb 15, by 11:59pm
Edge Detection. Today s reading. Cipolla & Gee on edge detection (available online) From Sandlot Science
 From Sandlot Science") Edge Detection From Sandlot Science Today s reading Cipolla & Gee on edge detection (available online) Project 1a assigned last Friday due this Friday Last time: Cross-correlation Let be the image, be
Edge Detection From Sandlot Science Today s reading Cipolla & Gee on edge detection (available online) Project 1a assigned last Friday due this Friday Last time: Cross-correlation Let be the image, be
Solution: filter the image, then subsample F 1 F 2. subsample blur subsample. blur
 Pyramids Gaussian pre-filtering Solution: filter the image, then subsample blur F 0 subsample blur subsample * F 0 H F 1 F 1 * H F 2 { Gaussian pyramid blur F 0 subsample blur subsample * F 0 H F 1 F 1
Pyramids Gaussian pre-filtering Solution: filter the image, then subsample blur F 0 subsample blur subsample * F 0 H F 1 F 1 * H F 2 { Gaussian pyramid blur F 0 subsample blur subsample * F 0 H F 1 F 1
Edge Detection. CSE 576 Ali Farhadi. Many slides from Steve Seitz and Larry Zitnick
 Edge Detection CSE 576 Ali Farhadi Many slides from Steve Seitz and Larry Zitnick Edge Attneave's Cat (1954) Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity
Edge Detection CSE 576 Ali Farhadi Many slides from Steve Seitz and Larry Zitnick Edge Attneave's Cat (1954) Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity
2%34 #5 +,,% ! # %& ()% #% +,,%. & /%0%)( 1 ! # %& % %()# +(& ,.+/ +&0%//#/ &
% #% +,,%. & /%0%)( 1 ! # %& % %()# +(& ,.+/ +&0%//#/ &") ! # %& ()% #% +,,%. & /%0%)( 1 2%34 #5 +,,%! # %& % %()# +(&,.+/ +&0%//#/ & & Many slides in this lecture are due to other authors; they are credited on the bottom right Topics of This Lecture Problem
! # %& ()% #% +,,%. & /%0%)( 1 2%34 #5 +,,%! # %& % %()# +(&,.+/ +&0%//#/ & & Many slides in this lecture are due to other authors; they are credited on the bottom right Topics of This Lecture Problem
CS 2770: Computer Vision. Edges and Segments. Prof. Adriana Kovashka University of Pittsburgh February 21, 2017
 CS 2770: Computer Vision Edges and Segments Prof. Adriana Kovashka University of Pittsburgh February 21, 2017 Edges vs Segments Figure adapted from J. Hays Edges vs Segments Edges More low-level Don t
CS 2770: Computer Vision Edges and Segments Prof. Adriana Kovashka University of Pittsburgh February 21, 2017 Edges vs Segments Figure adapted from J. Hays Edges vs Segments Edges More low-level Don t
convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection
 COS 429: COMPUTER VISON Linear Filters and Edge Detection convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection Reading:
COS 429: COMPUTER VISON Linear Filters and Edge Detection convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection Reading:
Image Analysis. Edge Detection
 Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
Anno accademico 2006/2007. Davide Migliore
 Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Edge Detection. Announcements. Edge detection. Origin of Edges. Mailing list: you should have received messages
 Announcements Mailing list: csep576@cs.washington.edu you should have received messages Project 1 out today (due in two weeks) Carpools Edge Detection From Sandlot Science Today s reading Forsyth, chapters
Announcements Mailing list: csep576@cs.washington.edu you should have received messages Project 1 out today (due in two weeks) Carpools Edge Detection From Sandlot Science Today s reading Forsyth, chapters
Image Analysis. Edge Detection
 Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
Lecture 7: Most Common Edge Detectors
 #1 Lecture 7: Most Common Edge Detectors Saad Bedros sbedros@umn.edu Edge Detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the
#1 Lecture 7: Most Common Edge Detectors Saad Bedros sbedros@umn.edu Edge Detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection
 Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Digital Image Processing. Image Enhancement - Filtering
 Digital Image Processing Image Enhancement - Filtering Derivative Derivative is defined as a rate of change. Discrete Derivative Finite Distance Example Derivatives in 2-dimension Derivatives of Images
Digital Image Processing Image Enhancement - Filtering Derivative Derivative is defined as a rate of change. Discrete Derivative Finite Distance Example Derivatives in 2-dimension Derivatives of Images
Edge detection. Convert a 2D image into a set of curves. Extracts salient features of the scene More compact than pixels
 Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
CS334: Digital Imaging and Multimedia Edges and Contours. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS334: Digital Imaging and Multimedia Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators From Edges
CS334: Digital Imaging and Multimedia Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators From Edges
Edge Detection (with a sidelight introduction to linear, associative operators). Images
. Images") Images (we will, eventually, come back to imaging geometry. But, now that we know how images come from the world, we will examine operations on images). Edge Detection (with a sidelight introduction to
Images (we will, eventually, come back to imaging geometry. But, now that we know how images come from the world, we will examine operations on images). Edge Detection (with a sidelight introduction to
CS534: Introduction to Computer Vision Edges and Contours. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS534: Introduction to Computer Vision Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators Laplacian
CS534: Introduction to Computer Vision Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators Laplacian
Low-level Vision Processing Algorithms Speaker: Ito, Dang Supporter: Ishii, Toyama and Y. Murakami
 Low-level Vision Processing Algorithms Speaker: Ito, Dang Supporter: Ishii, Toyama and Y. Murakami Adaptive Systems Lab The University of Aizu Overview Introduction What is Vision Processing? Basic Knowledge
Low-level Vision Processing Algorithms Speaker: Ito, Dang Supporter: Ishii, Toyama and Y. Murakami Adaptive Systems Lab The University of Aizu Overview Introduction What is Vision Processing? Basic Knowledge
Other Linear Filters CS 211A
 Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
Edge Detection Lecture 03 Computer Vision
 Edge Detection Lecture 3 Computer Vision Suggested readings Chapter 5 Linda G. Shapiro and George Stockman, Computer Vision, Upper Saddle River, NJ, Prentice Hall,. Chapter David A. Forsyth and Jean Ponce,
Edge Detection Lecture 3 Computer Vision Suggested readings Chapter 5 Linda G. Shapiro and George Stockman, Computer Vision, Upper Saddle River, NJ, Prentice Hall,. Chapter David A. Forsyth and Jean Ponce,
Topic 4 Image Segmentation
 Topic 4 Image Segmentation What is Segmentation? Why? Segmentation important contributing factor to the success of an automated image analysis process What is Image Analysis: Processing images to derive
Topic 4 Image Segmentation What is Segmentation? Why? Segmentation important contributing factor to the success of an automated image analysis process What is Image Analysis: Processing images to derive
Filtering Images. Contents
 Image Processing and Data Visualization with MATLAB Filtering Images Hansrudi Noser June 8-9, 010 UZH, Multimedia and Robotics Summer School Noise Smoothing Filters Sigmoid Filters Gradient Filters Contents
Image Processing and Data Visualization with MATLAB Filtering Images Hansrudi Noser June 8-9, 010 UZH, Multimedia and Robotics Summer School Noise Smoothing Filters Sigmoid Filters Gradient Filters Contents
Local Image preprocessing (cont d)
") Local Image preprocessing (cont d) 1 Outline - Edge detectors - Corner detectors - Reading: textbook 5.3.1-5.3.5 and 5.3.10 2 What are edges? Edges correspond to relevant features in the image. An edge
Local Image preprocessing (cont d) 1 Outline - Edge detectors - Corner detectors - Reading: textbook 5.3.1-5.3.5 and 5.3.10 2 What are edges? Edges correspond to relevant features in the image. An edge
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Straight Lines and Hough
 09/30/11 Straight Lines and Hough Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem, Lana Lazebnik, Steve Seitz, David Forsyth, David Lowe, Fei-Fei Li Project 1 A few project highlights
09/30/11 Straight Lines and Hough Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem, Lana Lazebnik, Steve Seitz, David Forsyth, David Lowe, Fei-Fei Li Project 1 A few project highlights
Edge Detection. EE/CSE 576 Linda Shapiro
 Edge Detection EE/CSE 576 Linda Shapiro Edge Attneave's Cat (1954) 2 Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity illumination discontinuity Edges are caused
Edge Detection EE/CSE 576 Linda Shapiro Edge Attneave's Cat (1954) 2 Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity illumination discontinuity Edges are caused
Comparison between Various Edge Detection Methods on Satellite Image
 Comparison between Various Edge Detection Methods on Satellite Image H.S. Bhadauria 1, Annapurna Singh 2, Anuj Kumar 3 Govind Ballabh Pant Engineering College ( Pauri garhwal),computer Science and Engineering
Comparison between Various Edge Detection Methods on Satellite Image H.S. Bhadauria 1, Annapurna Singh 2, Anuj Kumar 3 Govind Ballabh Pant Engineering College ( Pauri garhwal),computer Science and Engineering
Edge Detection. CS664 Computer Vision. 3. Edges. Several Causes of Edges. Detecting Edges. Finite Differences. The Gradient
 Edge Detection CS664 Computer Vision. Edges Convert a gray or color image into set of curves Represented as binary image Capture properties of shapes Dan Huttenlocher Several Causes of Edges Sudden changes
Edge Detection CS664 Computer Vision. Edges Convert a gray or color image into set of curves Represented as binary image Capture properties of shapes Dan Huttenlocher Several Causes of Edges Sudden changes
Perception. Autonomous Mobile Robots. Sensors Vision Uncertainties, Line extraction from laser scans. Autonomous Systems Lab. Zürich.
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
Filtering in frequency domain
 Filtering in frequency domain FFT FFT = Inverse FFT Filtering in frequency domain Can be faster than filtering in spatial domain (for large filters) Can help understand effect of filter Algorithm: 1. Convert
Filtering in frequency domain FFT FFT = Inverse FFT Filtering in frequency domain Can be faster than filtering in spatial domain (for large filters) Can help understand effect of filter Algorithm: 1. Convert
Lecture 4: Finding lines: from detection to model fitting
 Lecture 4: Finding lines: from detection to model fitting Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today Edge detection Canny edge detector Line fitting Hough Transform RANSAC (Problem
Lecture 4: Finding lines: from detection to model fitting Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today Edge detection Canny edge detector Line fitting Hough Transform RANSAC (Problem
Neighborhood operations
 Neighborhood operations Generate an output pixel on the basis of the pixel and its neighbors Often involve the convolution of an image with a filter kernel or mask g ( i, j) = f h = f ( i m, j n) h( m,
Neighborhood operations Generate an output pixel on the basis of the pixel and its neighbors Often involve the convolution of an image with a filter kernel or mask g ( i, j) = f h = f ( i m, j n) h( m,
Image Processing
 Image Processing 159.731 Canny Edge Detection Report Syed Irfanullah, Azeezullah 00297844 Danh Anh Huynh 02136047 1 Canny Edge Detection INTRODUCTION Edges Edges characterize boundaries and are therefore
Image Processing 159.731 Canny Edge Detection Report Syed Irfanullah, Azeezullah 00297844 Danh Anh Huynh 02136047 1 Canny Edge Detection INTRODUCTION Edges Edges characterize boundaries and are therefore
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Computer Vision I. Announcements. Fourier Tansform. Efficient Implementation. Edge and Corner Detection. CSE252A Lecture 13.
 Announcements Edge and Corner Detection HW3 assigned CSE252A Lecture 13 Efficient Implementation Both, the Box filter and the Gaussian filter are separable: First convolve each row of input image I with
Announcements Edge and Corner Detection HW3 assigned CSE252A Lecture 13 Efficient Implementation Both, the Box filter and the Gaussian filter are separable: First convolve each row of input image I with
EN1610 Image Understanding Lab # 3: Edges
 EN1610 Image Understanding Lab # 3: Edges The goal of this fourth lab is to ˆ Understanding what are edges, and different ways to detect them ˆ Understand different types of edge detectors - intensity,
EN1610 Image Understanding Lab # 3: Edges The goal of this fourth lab is to ˆ Understanding what are edges, and different ways to detect them ˆ Understand different types of edge detectors - intensity,
Does everyone have an override code?
 Does everyone have an override code? Project 1 due Friday 9pm Review of Filtering Filtering in frequency domain Can be faster than filtering in spatial domain (for large filters) Can help understand effect
Does everyone have an override code? Project 1 due Friday 9pm Review of Filtering Filtering in frequency domain Can be faster than filtering in spatial domain (for large filters) Can help understand effect
Computer Vision I. Announcement. Corners. Edges. Numerical Derivatives f(x) Edge and Corner Detection. CSE252A Lecture 11
 Edge and Corner Detection. CSE252A Lecture 11") Announcement Edge and Corner Detection Slides are posted HW due Friday CSE5A Lecture 11 Edges Corners Edge is Where Change Occurs: 1-D Change is measured by derivative in 1D Numerical Derivatives f(x)
Announcement Edge and Corner Detection Slides are posted HW due Friday CSE5A Lecture 11 Edges Corners Edge is Where Change Occurs: 1-D Change is measured by derivative in 1D Numerical Derivatives f(x)
Edge detection. Gradient-based edge operators
 Edge detection Gradient-based edge operators Prewitt Sobel Roberts Laplacian zero-crossings Canny edge detector Hough transform for detection of straight lines Circle Hough Transform Digital Image Processing:
Edge detection Gradient-based edge operators Prewitt Sobel Roberts Laplacian zero-crossings Canny edge detector Hough transform for detection of straight lines Circle Hough Transform Digital Image Processing:
Practical Image and Video Processing Using MATLAB
 Practical Image and Video Processing Using MATLAB Chapter 14 Edge detection What will we learn? What is edge detection and why is it so important to computer vision? What are the main edge detection techniques
Practical Image and Video Processing Using MATLAB Chapter 14 Edge detection What will we learn? What is edge detection and why is it so important to computer vision? What are the main edge detection techniques
CS4442/9542b Artificial Intelligence II prof. Olga Veksler
 CS4442/9542b Artificial Intelligence II prof. Olga Veksler Lecture 8 Computer Vision Introduction, Filtering Some slides from: D. Jacobs, D. Lowe, S. Seitz, A.Efros, X. Li, R. Fergus, J. Hayes, S. Lazebnik,
CS4442/9542b Artificial Intelligence II prof. Olga Veksler Lecture 8 Computer Vision Introduction, Filtering Some slides from: D. Jacobs, D. Lowe, S. Seitz, A.Efros, X. Li, R. Fergus, J. Hayes, S. Lazebnik,
Segmentation and Grouping
 Segmentation and Grouping How and what do we see? Fundamental Problems ' Focus of attention, or grouping ' What subsets of pixels do we consider as possible objects? ' All connected subsets? ' Representation
Segmentation and Grouping How and what do we see? Fundamental Problems ' Focus of attention, or grouping ' What subsets of pixels do we consider as possible objects? ' All connected subsets? ' Representation
Lecture 4: Image Processing
 Lecture 4: Image Processing Definitions Many graphics techniques that operate only on images Image processing: operations that take images as input, produce images as output In its most general form, an
Lecture 4: Image Processing Definitions Many graphics techniques that operate only on images Image processing: operations that take images as input, produce images as output In its most general form, an
Lecture: Edge Detection
 CMPUT 299 Winter 2007 Lecture: Edge Detection Irene Cheng Overview. What is a pixel in an image? 2. How does Photoshop, + human assistance, detect an edge in a picture/photograph? 3. Behind Photoshop -
CMPUT 299 Winter 2007 Lecture: Edge Detection Irene Cheng Overview. What is a pixel in an image? 2. How does Photoshop, + human assistance, detect an edge in a picture/photograph? 3. Behind Photoshop -
Lecture 4: Spatial Domain Transformations
 # Lecture 4: Spatial Domain Transformations Saad J Bedros sbedros@umn.edu Reminder 2 nd Quiz on the manipulator Part is this Fri, April 7 205, :5 AM to :0 PM Open Book, Open Notes, Focus on the material
# Lecture 4: Spatial Domain Transformations Saad J Bedros sbedros@umn.edu Reminder 2 nd Quiz on the manipulator Part is this Fri, April 7 205, :5 AM to :0 PM Open Book, Open Notes, Focus on the material
CS4442/9542b Artificial Intelligence II prof. Olga Veksler
 CS4442/9542b Artificial Intelligence II prof. Olga Veksler Lecture 2 Computer Vision Introduction, Filtering Some slides from: D. Jacobs, D. Lowe, S. Seitz, A.Efros, X. Li, R. Fergus, J. Hayes, S. Lazebnik,
CS4442/9542b Artificial Intelligence II prof. Olga Veksler Lecture 2 Computer Vision Introduction, Filtering Some slides from: D. Jacobs, D. Lowe, S. Seitz, A.Efros, X. Li, R. Fergus, J. Hayes, S. Lazebnik,
EECS490: Digital Image Processing. Lecture #19
 Lecture #19 Shading and texture analysis using morphology Gray scale reconstruction Basic image segmentation: edges v. regions Point and line locators, edge types and noise Edge operators: LoG, DoG, Canny
Lecture #19 Shading and texture analysis using morphology Gray scale reconstruction Basic image segmentation: edges v. regions Point and line locators, edge types and noise Edge operators: LoG, DoG, Canny
What Are Edges? Lecture 5: Gradients and Edge Detection. Boundaries of objects. Boundaries of Lighting. Types of Edges (1D Profiles)
") What Are Edges? Simple answer: discontinuities in intensity. Lecture 5: Gradients and Edge Detection Reading: T&V Section 4.1 and 4. Boundaries of objects Boundaries of Material Properties D.Jacobs, U.Maryland
What Are Edges? Simple answer: discontinuities in intensity. Lecture 5: Gradients and Edge Detection Reading: T&V Section 4.1 and 4. Boundaries of objects Boundaries of Material Properties D.Jacobs, U.Maryland
Filters and Pyramids. CSC320: Introduction to Visual Computing Michael Guerzhoy. Many slides from Steve Marschner, Alexei Efros
 Filters and Pyramids Wassily Kandinsky, "Accent in Pink" Many slides from Steve Marschner, Alexei Efros CSC320: Introduction to Visual Computing Michael Guerzhoy Moving Average In 2D What are the weights
Filters and Pyramids Wassily Kandinsky, "Accent in Pink" Many slides from Steve Marschner, Alexei Efros CSC320: Introduction to Visual Computing Michael Guerzhoy Moving Average In 2D What are the weights
Ulrik Söderström 16 Feb Image Processing. Segmentation
 Ulrik Söderström ulrik.soderstrom@tfe.umu.se 16 Feb 2011 Image Processing Segmentation What is Image Segmentation? To be able to extract information from an image it is common to subdivide it into background
Ulrik Söderström ulrik.soderstrom@tfe.umu.se 16 Feb 2011 Image Processing Segmentation What is Image Segmentation? To be able to extract information from an image it is common to subdivide it into background
Announcements. Edge Detection. An Isotropic Gaussian. Filters are templates. Assignment 2 on tracking due this Friday Midterm: Tuesday, May 3.
 Announcements Edge Detection Introduction to Computer Vision CSE 152 Lecture 9 Assignment 2 on tracking due this Friday Midterm: Tuesday, May 3. Reading from textbook An Isotropic Gaussian The picture
Announcements Edge Detection Introduction to Computer Vision CSE 152 Lecture 9 Assignment 2 on tracking due this Friday Midterm: Tuesday, May 3. Reading from textbook An Isotropic Gaussian The picture
Edges, interpolation, templates. Nuno Vasconcelos ECE Department, UCSD (with thanks to David Forsyth)
") Edges, interpolation, templates Nuno Vasconcelos ECE Department, UCSD (with thanks to David Forsyth) Gradients and edges edges are points of large gradient magnitude edge detection strategy 1. determine
Edges, interpolation, templates Nuno Vasconcelos ECE Department, UCSD (with thanks to David Forsyth) Gradients and edges edges are points of large gradient magnitude edge detection strategy 1. determine
Filters (cont.) CS 554 Computer Vision Pinar Duygulu Bilkent University
 CS 554 Computer Vision Pinar Duygulu Bilkent University") Filters (cont.) CS 554 Computer Vision Pinar Duygulu Bilkent University Today s topics Image Formation Image filters in spatial domain Filter is a mathematical operation of a grid of numbers Smoothing,
Filters (cont.) CS 554 Computer Vision Pinar Duygulu Bilkent University Today s topics Image Formation Image filters in spatial domain Filter is a mathematical operation of a grid of numbers Smoothing,
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Motion illusion, rotating snakes
 Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
SIFT - scale-invariant feature transform Konrad Schindler
 SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
An Algorithm for Blurred Thermal image edge enhancement for security by image processing technique
 An Algorithm for Blurred Thermal image edge enhancement for security by image processing technique Vinay Negi 1, Dr.K.P.Mishra 2 1 ECE (PhD Research scholar), Monad University, India, Hapur 2 ECE, KIET,
An Algorithm for Blurred Thermal image edge enhancement for security by image processing technique Vinay Negi 1, Dr.K.P.Mishra 2 1 ECE (PhD Research scholar), Monad University, India, Hapur 2 ECE, KIET,
Line, edge, blob and corner detection
 Line, edge, blob and corner detection Dmitri Melnikov MTAT.03.260 Pattern Recognition and Image Analysis April 5, 2011 1 / 33 Outline 1 Introduction 2 Line detection 3 Edge detection 4 Blob detection 5
Line, edge, blob and corner detection Dmitri Melnikov MTAT.03.260 Pattern Recognition and Image Analysis April 5, 2011 1 / 33 Outline 1 Introduction 2 Line detection 3 Edge detection 4 Blob detection 5
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
Concepts in. Edge Detection
 Concepts in Edge Detection Dr. Sukhendu Das Deptt. of Computer Science and Engg., Indian Institute of Technology, Madras Chennai 600036, India. http://www.cs.iitm.ernet.in/~sdas Email: sdas@iitm.ac.in
Concepts in Edge Detection Dr. Sukhendu Das Deptt. of Computer Science and Engg., Indian Institute of Technology, Madras Chennai 600036, India. http://www.cs.iitm.ernet.in/~sdas Email: sdas@iitm.ac.in
Detection of Edges Using Mathematical Morphological Operators
 OPEN TRANSACTIONS ON INFORMATION PROCESSING Volume 1, Number 1, MAY 2014 OPEN TRANSACTIONS ON INFORMATION PROCESSING Detection of Edges Using Mathematical Morphological Operators Suman Rani*, Deepti Bansal,
OPEN TRANSACTIONS ON INFORMATION PROCESSING Volume 1, Number 1, MAY 2014 OPEN TRANSACTIONS ON INFORMATION PROCESSING Detection of Edges Using Mathematical Morphological Operators Suman Rani*, Deepti Bansal,
Edge detection. Stefano Ferrari. Università degli Studi di Milano Elaborazione delle immagini (Image processing I)
") Edge detection Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini (Image processing I) academic year 2011 2012 Image segmentation Several image processing
Edge detection Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini (Image processing I) academic year 2011 2012 Image segmentation Several image processing
Image features. Image Features
 Image features Image features, such as edges and interest points, provide rich information on the image content. They correspond to local regions in the image and are fundamental in many applications in
Image features Image features, such as edges and interest points, provide rich information on the image content. They correspond to local regions in the image and are fundamental in many applications in
Templates, Image Pyramids, and Filter Banks
 Templates, Image Pyramids, and Filter Banks Computer Vision James Hays, Brown Slides: Hoiem and others Reminder Project due Friday Fourier Bases Teases away fast vs. slow changes in the image. This change
Templates, Image Pyramids, and Filter Banks Computer Vision James Hays, Brown Slides: Hoiem and others Reminder Project due Friday Fourier Bases Teases away fast vs. slow changes in the image. This change
SURVEY ON IMAGE PROCESSING IN THE FIELD OF DE-NOISING TECHNIQUES AND EDGE DETECTION TECHNIQUES ON RADIOGRAPHIC IMAGES
 SURVEY ON IMAGE PROCESSING IN THE FIELD OF DE-NOISING TECHNIQUES AND EDGE DETECTION TECHNIQUES ON RADIOGRAPHIC IMAGES 1 B.THAMOTHARAN, 2 M.MENAKA, 3 SANDHYA VAIDYANATHAN, 3 SOWMYA RAVIKUMAR 1 Asst. Prof.,
SURVEY ON IMAGE PROCESSING IN THE FIELD OF DE-NOISING TECHNIQUES AND EDGE DETECTION TECHNIQUES ON RADIOGRAPHIC IMAGES 1 B.THAMOTHARAN, 2 M.MENAKA, 3 SANDHYA VAIDYANATHAN, 3 SOWMYA RAVIKUMAR 1 Asst. Prof.,
CAP 5415 Computer Vision Fall 2012
 CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
Digital Image Processing (CS/ECE 545) Lecture 5: Edge Detection (Part 2) & Corner Detection
 Lecture 5: Edge Detection (Part 2) & Corner Detection") Digital Image Processing (CS/ECE 545) Lecture 5: Edge Detection (Part 2) & Corner Detection Prof Emmanuel Agu Computer Science Dept. Worcester Polytechnic Institute (WPI) Recall: Edge Detection Image processing
Digital Image Processing (CS/ECE 545) Lecture 5: Edge Detection (Part 2) & Corner Detection Prof Emmanuel Agu Computer Science Dept. Worcester Polytechnic Institute (WPI) Recall: Edge Detection Image processing
Texture and Other Uses of Filters
 CS 1699: Intro to Computer Vision Texture and Other Uses of Filters Prof. Adriana Kovashka University of Pittsburgh September 10, 2015 Slides from Kristen Grauman (12-52) and Derek Hoiem (54-83) Plan for
CS 1699: Intro to Computer Vision Texture and Other Uses of Filters Prof. Adriana Kovashka University of Pittsburgh September 10, 2015 Slides from Kristen Grauman (12-52) and Derek Hoiem (54-83) Plan for
Image Processing. Traitement d images. Yuliya Tarabalka Tel.
 Traitement d images Yuliya Tarabalka yuliya.tarabalka@hyperinet.eu yuliya.tarabalka@gipsa-lab.grenoble-inp.fr Tel. 04 76 82 62 68 Noise reduction Image restoration Restoration attempts to reconstruct an
Traitement d images Yuliya Tarabalka yuliya.tarabalka@hyperinet.eu yuliya.tarabalka@gipsa-lab.grenoble-inp.fr Tel. 04 76 82 62 68 Noise reduction Image restoration Restoration attempts to reconstruct an
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies"
 ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
Why is computer vision difficult?
 Why is computer vision difficult? Viewpoint variation Illumination Scale Why is computer vision difficult? Intra-class variation Motion (Source: S. Lazebnik) Background clutter Occlusion Challenges: local
Why is computer vision difficult? Viewpoint variation Illumination Scale Why is computer vision difficult? Intra-class variation Motion (Source: S. Lazebnik) Background clutter Occlusion Challenges: local
Raghuraman Gopalan Center for Automation Research University of Maryland, College Park
 2D Shape Matching (and Object Recognition) Raghuraman Gopalan Center for Automation Research University of Maryland, College Park 1 Outline What is a shape? Part 1: Matching/ Recognition Shape contexts
2D Shape Matching (and Object Recognition) Raghuraman Gopalan Center for Automation Research University of Maryland, College Park 1 Outline What is a shape? Part 1: Matching/ Recognition Shape contexts
Assignment 3: Edge Detection
 Assignment 3: Edge Detection - EE Affiliate I. INTRODUCTION This assignment looks at different techniques of detecting edges in an image. Edge detection is a fundamental tool in computer vision to analyse
Assignment 3: Edge Detection - EE Affiliate I. INTRODUCTION This assignment looks at different techniques of detecting edges in an image. Edge detection is a fundamental tool in computer vision to analyse
Computer Vision. Recap: Smoothing with a Gaussian. Recap: Effect of σ on derivatives. Computer Science Tripos Part II. Dr Christopher Town
 Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of