The NAO Robot, a case of study Robotics Franchi Alessio Mauro
|
|
|
- Melvyn Reeves
- 5 years ago
- Views:
Transcription




1 The NAO Robot, a case of study Robotics Franchi Alessio Mauro alessiomauro.franchi@polimi.it


2 Who am I? Franchi Alessio Mauro Master Degree in Computer Science Engineer at Politecnico of Milan First year Ph.D. student, collaborating with prof. Gini Research areas: Cognitive robotics Symbolic reasoning Grasping If you need to contact me: mail: office: AirLab DEIB, building 20, ground floor telephone: 3565
 Loading/reading images; Images")
 Structure")
3 This lesson Two sections Computer vision - OpenCV(~60 mins) Loading/reading images; Images manipulation Images filtering Videos streaming Introducing the NAO robot (~20 mins) Structure Sensors Capabilities


4 Computer Vision/OpenCV What is OpenCV (Open Source Computer Vision)? A set of libraries focused on real-time images processing. A project started by Intel Russia in 1998 Now are maintened by Itseez and Willow Garage 2500 optimized algorithms A full-featured CUDA and OpenCL interfaces are being actively developed right now Built to provide a common infrastructure for computer vision applications and to accelerate the use of machine perception in the commercial products



5 Computer Vision/OpenCV Some application: Detect and recognize faces, Identify objects, Classify human actions in videos, Track camera movements and moving objects, Extract 3D models of objects and produce 3D point clouds, Recognize scenery and establish markers to overlay it with augmented reality, Etc



6 Augmented Reality/OpenCV The technology functions by enhancing one s current perception of reality Live direct or indirect view of a physical real-world environment whose elements are augmented/extended
 Open command prompt and type setx -m OPENCV_DIR D:\OpenCV\Build\x86\vc11 b) Right click on Computer - > Properties -> Advanced- System settings -> Advanced tab->")
7 Let s start with OpenCV How to install OpenCV on Windows + VisualStudio Go to 2. Download auto-extracting or binary files to be compiled 3. Set environment variables a) Open command prompt and type setx -m OPENCV_DIR D:\OpenCV\Build\x86\vc11 b) Right click on Computer - > Properties -> Advanced- System settings -> Advanced tab-> Environment variable - > System variables c) Add to PATH %OPENCV_DIR%\bin d) Reboot the system
8 Let s start with OpenCV Now create a new Visual Studio project 1. Open Visual Studio Select File -> New -> Project 3. Once created right click on the project name -> Property 4. Configuration properties -> c/c++ -> General add to Additional Include Directories the following $(OPENCV_DIR)\..\..\include 5. Linker -> General add to «Additional libraries Directories the following $(OPENCV_DIR)\lib 6. Linker -> Input add to Additional Dependencies rhe following list opencv_core249d.lib;opencv_imgproc249d.lib;opencv_highgui249d.l ib;opencv_ml249d.lib;opencv_video249d.lib;opencv_features2d249d. lib;opencv_calib3d249d.lib;opencv_objdetect249d.lib;opencv_contrib 249d.lib;opencv_legacy249d.lib;opencv_flann249d.lib
9 Let s start with OpenCV The «Hello world» example
10 Some theory How images are composed Black and white Any digital image is a matrix of pixels. Any pixel have a value. The value of pixels are between 0 (=black) and a maximum depending on the number of bits of the image (8 bits = 255 = white). The image-depth refers to the bits allocated for each pixel. When the value of the pixel is increased, the intensity of that pixel is also increased. Example Image-depth 8 bit 1 channel, grayscale image Height is 4 pixel, width is 5 pixels Resolution = 4x5.
11 Some theory How images are composed Color Color image is composed by 3/4 planes; Red Green Blue Alpha (optional) Any pixel s final color is the combination of the corresponding values of pixels in the three/four planes (255, 0, 0) = red. (0, 255, 0) = green (255, 0, 255) = violate

12 Some theory Introducing the concept of feature An "interesting" part of an image Human beings are naturally able to find these «features», it is something innate. As consequences we are able to find two similar images, to compose images or to play with puzzle A simple game: are you able to tell me the exact location of each patche?


13 Some theory

14 Some theory


15 Let s go on with OpenCV Dilation Erosion The value of the output pixel is the maximum value of all the pixels in the input pixel's neighborhood. Pixels beyond the image border are assigned the minimum The value of the output pixel is the minimum value of all the pixels in the input pixel's neighborhood. Pixels beyond the image border are assigned the maximum


16 Let s go on with OpenCV Canny Edge detector 1. Filter out any noise. The Gaussian filter is used for this purpose 2. Four filters to detect horizontal, vertical and diagonal edges in the blurred image are used 3. Search for local maxima in the gradient map with non-maximum suppression 4. Thresholding with hysteresis: Lower than low threshold: pixel is not considered; Higher than high threshold: pixel is on an edge; Between the two thresholds: pixel is considered if nearby an already considered pixel.

17 Let s go on with OpenCV Harris corner detector 1. Corners represents a variation in the gradient in the image, we will look for this variation. So sweep a window in both direction and compute the variation of intensity Maximize the equation above to find windows with a large variation A window with a score R greater than a certain value is considered a corner


18 Let s go on with OpenCV The Hough transform A technique for detecting significant configurations of points in the image. Lines, segments, curves, The shapes can be expressed by a function in a new parameters space



19 Let s go on with OpenCV The Hough transform How points are transformed? Points are the intersection of two or more lines So points is a curve in the parameters space


20 Let s go on with OpenCV The Hough transform -How lines are transformed? Curves corresponding the three points on the lines intersect in a given point in the parameters space This point is the image of the lines.
 2 cameras, 4 directional microphones,")

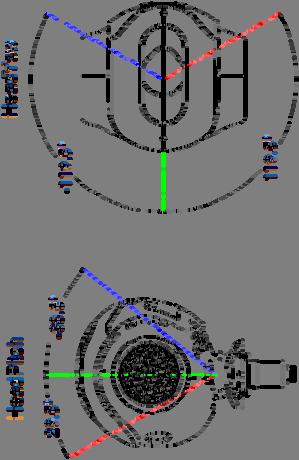
21 The NAO robot NAO is a programmable, 58cm tall humanoid robot 25 degrees of freedom (DOF) 2 cameras, 4 directional microphones, sonar, 2 IR receiver/emitter, 1 inertial board, 9 tactile sensors and 8 pressure sensors voice synthesizer, LED lights, and 2 speakers

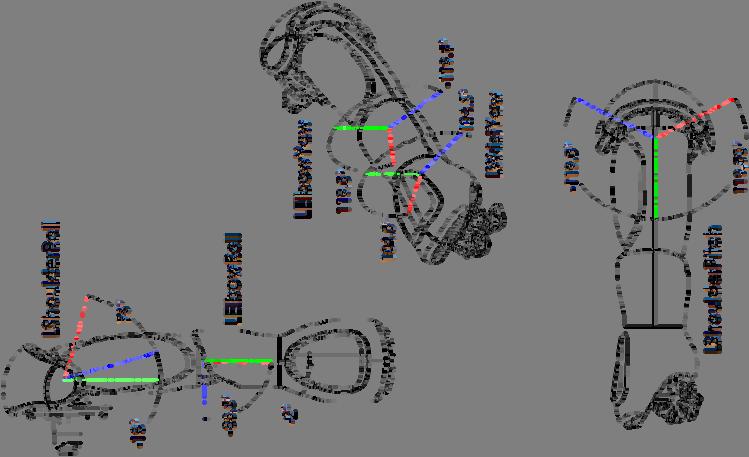
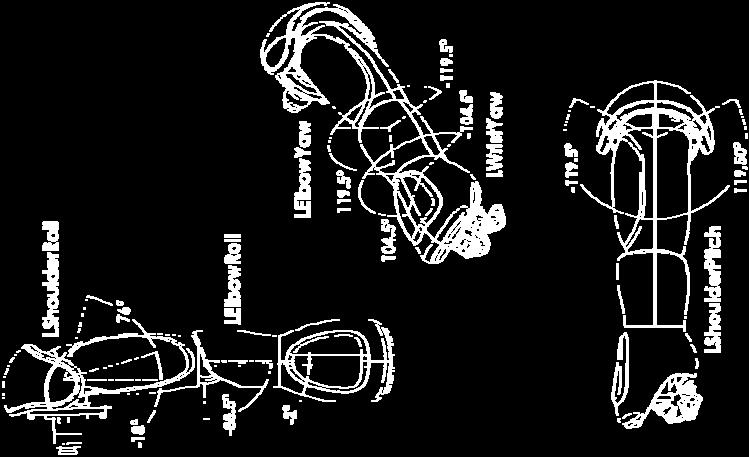
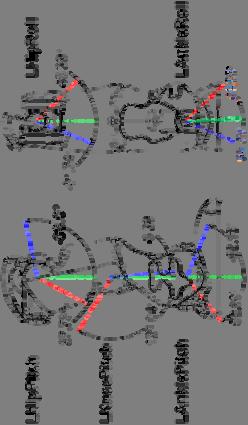
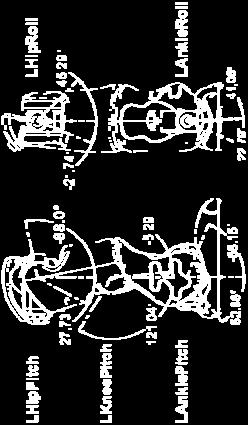
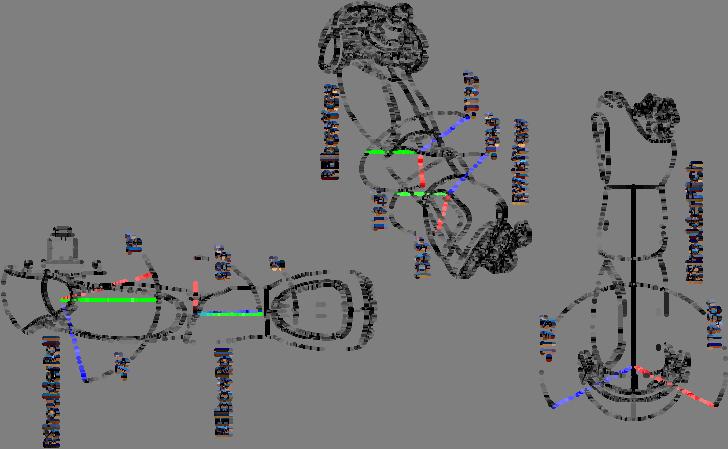
22 Links and axis Links length Axis definition The X axis is positive toward NAO s front, the Y from right to left and the Z is vertical.
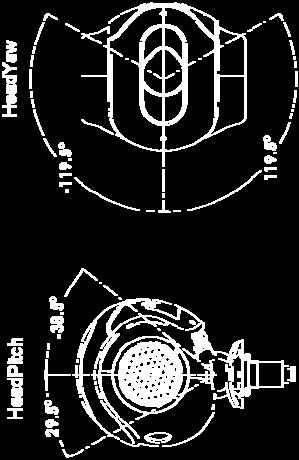
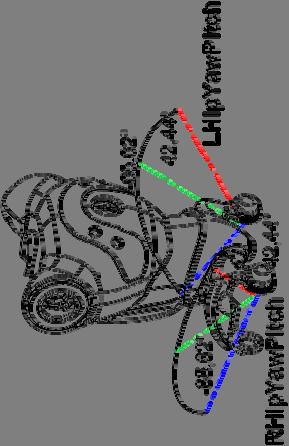
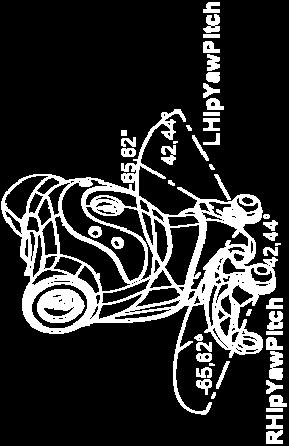

23 Joints


24 Sensors Sensor network: 2 cameras, 4 directional microphones, sonar rangefinder, 2 IR emitters and receivers, 1 inertial board, 9 tactile sensors 8 pressure sensors voice synthesizer, LED lights, 2 speakers




25 Some examples Some basic movements Standing up; Sitting down; Walking and some more complex: Dancing; Tracking obects; Climbing stairs; Robocup. Videos!
Laboratory of Applied Robotics
 Laboratory of Applied Robotics OpenCV: Shape Detection Paolo Bevilacqua RGB (Red-Green-Blue): Color Spaces RGB and HSV Color defined in relation to primary colors Correlated channels, information on both
Laboratory of Applied Robotics OpenCV: Shape Detection Paolo Bevilacqua RGB (Red-Green-Blue): Color Spaces RGB and HSV Color defined in relation to primary colors Correlated channels, information on both
Anno accademico 2006/2007. Davide Migliore
 Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Grasping Known Objects with Aldebaran Nao
 CS365 Project Report Grasping Known Objects with Aldebaran Nao By: Ashu Gupta( ashug@iitk.ac.in) Mohd. Dawood( mdawood@iitk.ac.in) Department of Computer Science and Engineering IIT Kanpur Mentor: Prof.
CS365 Project Report Grasping Known Objects with Aldebaran Nao By: Ashu Gupta( ashug@iitk.ac.in) Mohd. Dawood( mdawood@iitk.ac.in) Department of Computer Science and Engineering IIT Kanpur Mentor: Prof.
Computer Vision I - Appearance-based Matching and Projective Geometry
 Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 01/11/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 01/11/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Introduction to Medical Imaging (5XSA0)
") 1 Introduction to Medical Imaging (5XSA0) Visual feature extraction Color and texture analysis Sveta Zinger ( s.zinger@tue.nl ) Introduction (1) Features What are features? Feature a piece of information
1 Introduction to Medical Imaging (5XSA0) Visual feature extraction Color and texture analysis Sveta Zinger ( s.zinger@tue.nl ) Introduction (1) Features What are features? Feature a piece of information
Construction Progress Management and Interior Work Analysis Using Kinect 3D Image Sensors
 33 rd International Symposium on Automation and Robotics in Construction (ISARC 2016) Construction Progress Management and Interior Work Analysis Using Kinect 3D Image Sensors Kosei Ishida 1 1 School of
33 rd International Symposium on Automation and Robotics in Construction (ISARC 2016) Construction Progress Management and Interior Work Analysis Using Kinect 3D Image Sensors Kosei Ishida 1 1 School of
Gaze Tracking. Introduction :
 Introduction : Gaze Tracking In 1879 in Paris, Louis Émile Javal observed that reading does not involve a smooth sweeping of the eyes along the text, as previously assumed, but a series of short stops
Introduction : Gaze Tracking In 1879 in Paris, Louis Émile Javal observed that reading does not involve a smooth sweeping of the eyes along the text, as previously assumed, but a series of short stops
Check the Desktop development with C++ in the install options. You may want to take 15 minutes to try the Hello World C++ tutorial:
 CS262 Computer Vision OpenCV 3 Configuration with Visual Studio 2017 Prof. John Magee Clark University Install Visual Studio 2017 Community Check the Desktop development with C++ in the install options.
CS262 Computer Vision OpenCV 3 Configuration with Visual Studio 2017 Prof. John Magee Clark University Install Visual Studio 2017 Community Check the Desktop development with C++ in the install options.
Edge and corner detection
 Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Computer Vision I - Appearance-based Matching and Projective Geometry
 Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 05/11/2015 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 05/11/2015 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
[ ] Review. Edges and Binary Images. Edge detection. Derivative of Gaussian filter. Image gradient. Tuesday, Sept 16
![[ ] Review. Edges and Binary Images. Edge detection. Derivative of Gaussian filter. Image gradient. Tuesday, Sept 16](/thumbs/89/98496315.jpg "[ ] Review. Edges and Binary Images. Edge detection. Derivative of Gaussian filter. Image gradient. Tuesday, Sept 16") Review Edges and Binary Images Tuesday, Sept 6 Thought question: how could we compute a temporal gradient from video data? What filter is likely to have produced this image output? original filtered output
Review Edges and Binary Images Tuesday, Sept 6 Thought question: how could we compute a temporal gradient from video data? What filter is likely to have produced this image output? original filtered output
Effects Of Shadow On Canny Edge Detection through a camera
 1523 Effects Of Shadow On Canny Edge Detection through a camera Srajit Mehrotra Shadow causes errors in computer vision as it is difficult to detect objects that are under the influence of shadows. Shadow
1523 Effects Of Shadow On Canny Edge Detection through a camera Srajit Mehrotra Shadow causes errors in computer vision as it is difficult to detect objects that are under the influence of shadows. Shadow
Edges and Binary Images
 CS 699: Intro to Computer Vision Edges and Binary Images Prof. Adriana Kovashka University of Pittsburgh September 5, 205 Plan for today Edge detection Binary image analysis Homework Due on 9/22, :59pm
CS 699: Intro to Computer Vision Edges and Binary Images Prof. Adriana Kovashka University of Pittsburgh September 5, 205 Plan for today Edge detection Binary image analysis Homework Due on 9/22, :59pm
Wikipedia - Mysid
 Wikipedia - Mysid Erik Brynjolfsson, MIT Filtering Edges Corners Feature points Also called interest points, key points, etc. Often described as local features. Szeliski 4.1 Slides from Rick Szeliski,
Wikipedia - Mysid Erik Brynjolfsson, MIT Filtering Edges Corners Feature points Also called interest points, key points, etc. Often described as local features. Szeliski 4.1 Slides from Rick Szeliski,
SECTION 5 IMAGE PROCESSING 2
 SECTION 5 IMAGE PROCESSING 2 5.1 Resampling 3 5.1.1 Image Interpolation Comparison 3 5.2 Convolution 3 5.3 Smoothing Filters 3 5.3.1 Mean Filter 3 5.3.2 Median Filter 4 5.3.3 Pseudomedian Filter 6 5.3.4
SECTION 5 IMAGE PROCESSING 2 5.1 Resampling 3 5.1.1 Image Interpolation Comparison 3 5.2 Convolution 3 5.3 Smoothing Filters 3 5.3.1 Mean Filter 3 5.3.2 Median Filter 4 5.3.3 Pseudomedian Filter 6 5.3.4
Advanced Video Content Analysis and Video Compression (5LSH0), Module 4
, Module 4") Advanced Video Content Analysis and Video Compression (5LSH0), Module 4 Visual feature extraction Part I: Color and texture analysis Sveta Zinger Video Coding and Architectures Research group, TU/e ( s.zinger@tue.nl
Advanced Video Content Analysis and Video Compression (5LSH0), Module 4 Visual feature extraction Part I: Color and texture analysis Sveta Zinger Video Coding and Architectures Research group, TU/e ( s.zinger@tue.nl
Other Linear Filters CS 211A
 Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong)
") Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Extracting Layers and Recognizing Features for Automatic Map Understanding. Yao-Yi Chiang
 Extracting Layers and Recognizing Features for Automatic Map Understanding Yao-Yi Chiang 0 Outline Introduction/ Problem Motivation Map Processing Overview Map Decomposition Feature Recognition Discussion
Extracting Layers and Recognizing Features for Automatic Map Understanding Yao-Yi Chiang 0 Outline Introduction/ Problem Motivation Map Processing Overview Map Decomposition Feature Recognition Discussion
Real-time image processing and object recognition for robotics applications. Adrian Stratulat
 Real-time image processing and object recognition for robotics applications Adrian Stratulat What is computer vision? Computer vision is a field that includes methods for acquiring, processing, analyzing,
Real-time image processing and object recognition for robotics applications Adrian Stratulat What is computer vision? Computer vision is a field that includes methods for acquiring, processing, analyzing,
Types of Edges. Why Edge Detection? Types of Edges. Edge Detection. Gradient. Edge Detection
 Why Edge Detection? How can an algorithm extract relevant information from an image that is enables the algorithm to recognize objects? The most important information for the interpretation of an image
Why Edge Detection? How can an algorithm extract relevant information from an image that is enables the algorithm to recognize objects? The most important information for the interpretation of an image
Lecture: Edge Detection
 CMPUT 299 Winter 2007 Lecture: Edge Detection Irene Cheng Overview. What is a pixel in an image? 2. How does Photoshop, + human assistance, detect an edge in a picture/photograph? 3. Behind Photoshop -
CMPUT 299 Winter 2007 Lecture: Edge Detection Irene Cheng Overview. What is a pixel in an image? 2. How does Photoshop, + human assistance, detect an edge in a picture/photograph? 3. Behind Photoshop -
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 02 130124 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Basics Image Formation Image Processing 3 Intelligent
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 02 130124 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Basics Image Formation Image Processing 3 Intelligent
Pattern Feature Detection for Camera Calibration Using Circular Sample
 Pattern Feature Detection for Camera Calibration Using Circular Sample Dong-Won Shin and Yo-Sung Ho (&) Gwangju Institute of Science and Technology (GIST), 13 Cheomdan-gwagiro, Buk-gu, Gwangju 500-71,
Pattern Feature Detection for Camera Calibration Using Circular Sample Dong-Won Shin and Yo-Sung Ho (&) Gwangju Institute of Science and Technology (GIST), 13 Cheomdan-gwagiro, Buk-gu, Gwangju 500-71,
An Algorithm for Blurred Thermal image edge enhancement for security by image processing technique
 An Algorithm for Blurred Thermal image edge enhancement for security by image processing technique Vinay Negi 1, Dr.K.P.Mishra 2 1 ECE (PhD Research scholar), Monad University, India, Hapur 2 ECE, KIET,
An Algorithm for Blurred Thermal image edge enhancement for security by image processing technique Vinay Negi 1, Dr.K.P.Mishra 2 1 ECE (PhD Research scholar), Monad University, India, Hapur 2 ECE, KIET,
Solution: filter the image, then subsample F 1 F 2. subsample blur subsample. blur
 Pyramids Gaussian pre-filtering Solution: filter the image, then subsample blur F 0 subsample blur subsample * F 0 H F 1 F 1 * H F 2 { Gaussian pyramid blur F 0 subsample blur subsample * F 0 H F 1 F 1
Pyramids Gaussian pre-filtering Solution: filter the image, then subsample blur F 0 subsample blur subsample * F 0 H F 1 F 1 * H F 2 { Gaussian pyramid blur F 0 subsample blur subsample * F 0 H F 1 F 1
Image Processing: Final Exam November 10, :30 10:30
 Image Processing: Final Exam November 10, 2017-8:30 10:30 Student name: Student number: Put your name and student number on all of the papers you hand in (if you take out the staple). There are always
Image Processing: Final Exam November 10, 2017-8:30 10:30 Student name: Student number: Put your name and student number on all of the papers you hand in (if you take out the staple). There are always
PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO
 Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.1: 2D Motion Estimation in Images Jürgen Sturm Technische Universität München 3D to 2D Perspective Projections
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.1: 2D Motion Estimation in Images Jürgen Sturm Technische Universität München 3D to 2D Perspective Projections
Lecture 6: Edge Detection
 #1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
#1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
As stated in the main document, in each exercise, the required movements of the upper
 Supplementary material Operation of the tracking system As stated in the main document, in each exercise, the required movements of the upper limb segments, fingers, and tangible objects are detected from
Supplementary material Operation of the tracking system As stated in the main document, in each exercise, the required movements of the upper limb segments, fingers, and tangible objects are detected from
Filtering Images. Contents
 Image Processing and Data Visualization with MATLAB Filtering Images Hansrudi Noser June 8-9, 010 UZH, Multimedia and Robotics Summer School Noise Smoothing Filters Sigmoid Filters Gradient Filters Contents
Image Processing and Data Visualization with MATLAB Filtering Images Hansrudi Noser June 8-9, 010 UZH, Multimedia and Robotics Summer School Noise Smoothing Filters Sigmoid Filters Gradient Filters Contents
Segmentation I: Edges and Lines
 Segmentation I: Edges and Lines Prof. Eric Miller elmiller@ece.tufts.edu Fall 2007 EN 74-ECE Image Processing Lecture 8-1 Segmentation Problem of breaking an image up into regions are are interesting as
Segmentation I: Edges and Lines Prof. Eric Miller elmiller@ece.tufts.edu Fall 2007 EN 74-ECE Image Processing Lecture 8-1 Segmentation Problem of breaking an image up into regions are are interesting as
Edge detection. Goal: Identify sudden. an image. Ideal: artist s line drawing. object-level knowledge)
") Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image can be encoded in the edges More compact than pixels Ideal: artist
Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image can be encoded in the edges More compact than pixels Ideal: artist
Analysis of Image and Video Using Color, Texture and Shape Features for Object Identification
 IOSR Journal of Computer Engineering (IOSR-JCE) e-issn: 2278-0661,p-ISSN: 2278-8727, Volume 16, Issue 6, Ver. VI (Nov Dec. 2014), PP 29-33 Analysis of Image and Video Using Color, Texture and Shape Features
IOSR Journal of Computer Engineering (IOSR-JCE) e-issn: 2278-0661,p-ISSN: 2278-8727, Volume 16, Issue 6, Ver. VI (Nov Dec. 2014), PP 29-33 Analysis of Image and Video Using Color, Texture and Shape Features
Image Processing
 Image Processing 159.731 Canny Edge Detection Report Syed Irfanullah, Azeezullah 00297844 Danh Anh Huynh 02136047 1 Canny Edge Detection INTRODUCTION Edges Edges characterize boundaries and are therefore
Image Processing 159.731 Canny Edge Detection Report Syed Irfanullah, Azeezullah 00297844 Danh Anh Huynh 02136047 1 Canny Edge Detection INTRODUCTION Edges Edges characterize boundaries and are therefore
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
ECE 172A: Introduction to Intelligent Systems: Machine Vision, Fall Midterm Examination
 ECE 172A: Introduction to Intelligent Systems: Machine Vision, Fall 2008 October 29, 2008 Notes: Midterm Examination This is a closed book and closed notes examination. Please be precise and to the point.
ECE 172A: Introduction to Intelligent Systems: Machine Vision, Fall 2008 October 29, 2008 Notes: Midterm Examination This is a closed book and closed notes examination. Please be precise and to the point.
An Implementation on Object Move Detection Using OpenCV
 An Implementation on Object Move Detection Using OpenCV Professor: Dr. Ali Arya Reported by: Farzin Farhadi-Niaki Department of Systems and Computer Engineering Carleton University Ottawa, Canada I. INTRODUCTION
An Implementation on Object Move Detection Using OpenCV Professor: Dr. Ali Arya Reported by: Farzin Farhadi-Niaki Department of Systems and Computer Engineering Carleton University Ottawa, Canada I. INTRODUCTION
Computer Science Faculty, Bandar Lampung University, Bandar Lampung, Indonesia
 Application Object Detection Using Histogram of Oriented Gradient For Artificial Intelegence System Module of Nao Robot (Control System Laboratory (LSKK) Bandung Institute of Technology) A K Saputra 1.,
Application Object Detection Using Histogram of Oriented Gradient For Artificial Intelegence System Module of Nao Robot (Control System Laboratory (LSKK) Bandung Institute of Technology) A K Saputra 1.,
Edge Detection Using Streaming SIMD Extensions On Low Cost Robotic Platforms
 Edge Detection Using Streaming SIMD Extensions On Low Cost Robotic Platforms Matthias Hofmann, Fabian Rensen, Ingmar Schwarz and Oliver Urbann Abstract Edge detection is a popular technique for extracting
Edge Detection Using Streaming SIMD Extensions On Low Cost Robotic Platforms Matthias Hofmann, Fabian Rensen, Ingmar Schwarz and Oliver Urbann Abstract Edge detection is a popular technique for extracting
Programming and Pictures: Computational Photography and Applications to Math and Physics. GISA 2016 Session 131 Marist School Christopher Michaud
 Programming and Pictures: Computational Photography and Applications to Math and Physics GISA 2016 Session 131 Marist School Christopher Michaud Purpose Explore how math and physics concepts are used to
Programming and Pictures: Computational Photography and Applications to Math and Physics GISA 2016 Session 131 Marist School Christopher Michaud Purpose Explore how math and physics concepts are used to
Team Description Paper Team AutonOHM
 Team Description Paper Team AutonOHM Jon Martin, Daniel Ammon, Helmut Engelhardt, Tobias Fink, Tobias Scholz, and Marco Masannek University of Applied Science Nueremberg Georg-Simon-Ohm, Kesslerplatz 12,
Team Description Paper Team AutonOHM Jon Martin, Daniel Ammon, Helmut Engelhardt, Tobias Fink, Tobias Scholz, and Marco Masannek University of Applied Science Nueremberg Georg-Simon-Ohm, Kesslerplatz 12,
Line, edge, blob and corner detection
 Line, edge, blob and corner detection Dmitri Melnikov MTAT.03.260 Pattern Recognition and Image Analysis April 5, 2011 1 / 33 Outline 1 Introduction 2 Line detection 3 Edge detection 4 Blob detection 5
Line, edge, blob and corner detection Dmitri Melnikov MTAT.03.260 Pattern Recognition and Image Analysis April 5, 2011 1 / 33 Outline 1 Introduction 2 Line detection 3 Edge detection 4 Blob detection 5
Edge detection. Winter in Kraków photographed by Marcin Ryczek
 Edge detection Winter in Kraków photographed by Marcin Ryczek Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, edges carry most of the semantic and shape information
Edge detection Winter in Kraków photographed by Marcin Ryczek Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, edges carry most of the semantic and shape information
Capturing, Modeling, Rendering 3D Structures
 Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Keywords: clustering, construction, machine vision
 CS4758: Robot Construction Worker Alycia Gailey, biomedical engineering, graduate student: asg47@cornell.edu Alex Slover, computer science, junior: ais46@cornell.edu Abstract: Progress has been made in
CS4758: Robot Construction Worker Alycia Gailey, biomedical engineering, graduate student: asg47@cornell.edu Alex Slover, computer science, junior: ais46@cornell.edu Abstract: Progress has been made in
Binocular Stereo Vision. System 6 Introduction Is there a Wedge in this 3D scene?
 System 6 Introduction Is there a Wedge in this 3D scene? Binocular Stereo Vision Data a stereo pair of images! Given two 2D images of an object, how can we reconstruct 3D awareness of it? AV: 3D recognition
System 6 Introduction Is there a Wedge in this 3D scene? Binocular Stereo Vision Data a stereo pair of images! Given two 2D images of an object, how can we reconstruct 3D awareness of it? AV: 3D recognition
CS 378: Autonomous Intelligent Robotics. Instructor: Jivko Sinapov
 CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Visual Registration and Recognition Announcements Homework 6 is out, due 4/5 4/7 Installing
CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Visual Registration and Recognition Announcements Homework 6 is out, due 4/5 4/7 Installing
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 2: Edge detection From Sandlot Science Announcements Project 1 (Hybrid Images) is now on the course webpage (see Projects link) Due Wednesday, Feb 15, by 11:59pm
CS5670: Computer Vision Noah Snavely Lecture 2: Edge detection From Sandlot Science Announcements Project 1 (Hybrid Images) is now on the course webpage (see Projects link) Due Wednesday, Feb 15, by 11:59pm
LUMS Mine Detector Project
 LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
On Road Vehicle Detection using Shadows
 On Road Vehicle Detection using Shadows Gilad Buchman Grasp Lab, Department of Computer and Information Science School of Engineering University of Pennsylvania, Philadelphia, PA buchmag@seas.upenn.edu
On Road Vehicle Detection using Shadows Gilad Buchman Grasp Lab, Department of Computer and Information Science School of Engineering University of Pennsylvania, Philadelphia, PA buchmag@seas.upenn.edu
Jo-Car2 Autonomous Mode. Path Planning (Cost Matrix Algorithm)
") Chapter 8.2 Jo-Car2 Autonomous Mode Path Planning (Cost Matrix Algorithm) Introduction: In order to achieve its mission and reach the GPS goal safely; without crashing into obstacles or leaving the lane,
Chapter 8.2 Jo-Car2 Autonomous Mode Path Planning (Cost Matrix Algorithm) Introduction: In order to achieve its mission and reach the GPS goal safely; without crashing into obstacles or leaving the lane,
AN EFFICIENT APPROACH FOR IMPROVING CANNY EDGE DETECTION ALGORITHM
 AN EFFICIENT APPROACH FOR IMPROVING CANNY EDGE DETECTION ALGORITHM Shokhan M. H. Department of Computer Science, Al-Anbar University, Iraq ABSTRACT Edge detection is one of the most important stages in
AN EFFICIENT APPROACH FOR IMPROVING CANNY EDGE DETECTION ALGORITHM Shokhan M. H. Department of Computer Science, Al-Anbar University, Iraq ABSTRACT Edge detection is one of the most important stages in
Final Review CMSC 733 Fall 2014
 Final Review CMSC 733 Fall 2014 We have covered a lot of material in this course. One way to organize this material is around a set of key equations and algorithms. You should be familiar with all of these,
Final Review CMSC 733 Fall 2014 We have covered a lot of material in this course. One way to organize this material is around a set of key equations and algorithms. You should be familiar with all of these,
Edge Detection CSC 767
 Edge Detection CSC 767 Edge detection Goal: Identify sudden changes (discontinuities) in an image Most semantic and shape information from the image can be encoded in the edges More compact than pixels
Edge Detection CSC 767 Edge detection Goal: Identify sudden changes (discontinuities) in an image Most semantic and shape information from the image can be encoded in the edges More compact than pixels
Image processing and features
 Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Digital Image Processing. Image Enhancement - Filtering
 Digital Image Processing Image Enhancement - Filtering Derivative Derivative is defined as a rate of change. Discrete Derivative Finite Distance Example Derivatives in 2-dimension Derivatives of Images
Digital Image Processing Image Enhancement - Filtering Derivative Derivative is defined as a rate of change. Discrete Derivative Finite Distance Example Derivatives in 2-dimension Derivatives of Images
Correcting User Guided Image Segmentation
 Correcting User Guided Image Segmentation Garrett Bernstein (gsb29) Karen Ho (ksh33) Advanced Machine Learning: CS 6780 Abstract We tackle the problem of segmenting an image into planes given user input.
Correcting User Guided Image Segmentation Garrett Bernstein (gsb29) Karen Ho (ksh33) Advanced Machine Learning: CS 6780 Abstract We tackle the problem of segmenting an image into planes given user input.
Introduction to Computer Vision
 Introduction to Computer Vision Dr. Gerhard Roth COMP 4102A Winter 2015 Version 2 General Information Instructor: Adjunct Prof. Dr. Gerhard Roth gerhardroth@rogers.com read hourly gerhardroth@cmail.carleton.ca
Introduction to Computer Vision Dr. Gerhard Roth COMP 4102A Winter 2015 Version 2 General Information Instructor: Adjunct Prof. Dr. Gerhard Roth gerhardroth@rogers.com read hourly gerhardroth@cmail.carleton.ca
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Automatic Image Alignment (feature-based)
") Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows
 ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 29 January 2009 Figure 1: 3D Photography
ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 29 January 2009 Figure 1: 3D Photography
Bellwork. Find the absolute value for each point
 Bellwork Find the absolute value for each point a 4 b 0 2 c 6 1) a = 2) b = 3) c = 1 How many of you have ever been to a concert or a sports event where you had a ticket. Let's talk about what was on the
Bellwork Find the absolute value for each point a 4 b 0 2 c 6 1) a = 2) b = 3) c = 1 How many of you have ever been to a concert or a sports event where you had a ticket. Let's talk about what was on the
CMPUT 206. Introduction to Digital Image Processing
 CMPUT 206 Introduction to Digital Image Processing Overview. What is a pixel in an image? 2. How does Photoshop, + human assistance, detect an edge in a picture/photograph? 3. Behind Photoshop - How does
CMPUT 206 Introduction to Digital Image Processing Overview. What is a pixel in an image? 2. How does Photoshop, + human assistance, detect an edge in a picture/photograph? 3. Behind Photoshop - How does
Edge detection. Winter in Kraków photographed by Marcin Ryczek
 Edge detection Winter in Kraków photographed by Marcin Ryczek Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image
Edge detection Winter in Kraków photographed by Marcin Ryczek Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image
Local invariant features
 Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Previously. Edge detection. Today. Thresholding. Gradients -> edges 2/1/2011. Edges and Binary Image Analysis
 2//20 Previously Edges and Binary Image Analysis Mon, Jan 3 Prof. Kristen Grauman UT-Austin Filters allow local image neighborhood to influence our description and features Smoothing to reduce noise Derivatives
2//20 Previously Edges and Binary Image Analysis Mon, Jan 3 Prof. Kristen Grauman UT-Austin Filters allow local image neighborhood to influence our description and features Smoothing to reduce noise Derivatives
Local Image preprocessing (cont d)
") Local Image preprocessing (cont d) 1 Outline - Edge detectors - Corner detectors - Reading: textbook 5.3.1-5.3.5 and 5.3.10 2 What are edges? Edges correspond to relevant features in the image. An edge
Local Image preprocessing (cont d) 1 Outline - Edge detectors - Corner detectors - Reading: textbook 5.3.1-5.3.5 and 5.3.10 2 What are edges? Edges correspond to relevant features in the image. An edge
Announcements. Edges. Last Lecture. Gradients: Numerical Derivatives f(x) Edge Detection, Lines. Intro Computer Vision. CSE 152 Lecture 10
 Edge Detection, Lines. Intro Computer Vision. CSE 152 Lecture 10") Announcements Assignment 2 due Tuesday, May 4. Edge Detection, Lines Midterm: Thursday, May 6. Introduction to Computer Vision CSE 152 Lecture 10 Edges Last Lecture 1. Object boundaries 2. Surface normal
Announcements Assignment 2 due Tuesday, May 4. Edge Detection, Lines Midterm: Thursday, May 6. Introduction to Computer Vision CSE 152 Lecture 10 Edges Last Lecture 1. Object boundaries 2. Surface normal
CS4495/6495 Introduction to Computer Vision
 CS4495/6495 Introduction to Computer Vision 9C-L1 3D perception Some slides by Kelsey Hawkins Motivation Why do animals, people & robots need vision? To detect and recognize objects/landmarks Is that a
CS4495/6495 Introduction to Computer Vision 9C-L1 3D perception Some slides by Kelsey Hawkins Motivation Why do animals, people & robots need vision? To detect and recognize objects/landmarks Is that a
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision
 Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
MORPHOLOGICAL EDGE DETECTION AND CORNER DETECTION ALGORITHM USING CHAIN-ENCODING
 MORPHOLOGICAL EDGE DETECTION AND CORNER DETECTION ALGORITHM USING CHAIN-ENCODING Neeta Nain, Vijay Laxmi, Ankur Kumar Jain & Rakesh Agarwal Department of Computer Engineering Malaviya National Institute
MORPHOLOGICAL EDGE DETECTION AND CORNER DETECTION ALGORITHM USING CHAIN-ENCODING Neeta Nain, Vijay Laxmi, Ankur Kumar Jain & Rakesh Agarwal Department of Computer Engineering Malaviya National Institute
Introduction to Mobile Robotics Techniques for 3D Mapping
 Introduction to Mobile Robotics Techniques for 3D Mapping Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Why 3D Representations Robots live in the 3D world. 2D maps have been applied successfully for
Introduction to Mobile Robotics Techniques for 3D Mapping Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Why 3D Representations Robots live in the 3D world. 2D maps have been applied successfully for
Avigilon Control Center Web Client User Guide
 Avigilon Control Center Web Client User Guide Version: 4.12 Standard PDF-WEBCLIENT-S-E-Rev2 Copyright 2013 Avigilon. All rights reserved. The information presented is subject to change without notice.
Avigilon Control Center Web Client User Guide Version: 4.12 Standard PDF-WEBCLIENT-S-E-Rev2 Copyright 2013 Avigilon. All rights reserved. The information presented is subject to change without notice.
Edge detection. Convert a 2D image into a set of curves. Extracts salient features of the scene More compact than pixels
 Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
Computer vision: models, learning and inference. Chapter 13 Image preprocessing and feature extraction
 Computer vision: models, learning and inference Chapter 13 Image preprocessing and feature extraction Preprocessing The goal of pre-processing is to try to reduce unwanted variation in image due to lighting,
Computer vision: models, learning and inference Chapter 13 Image preprocessing and feature extraction Preprocessing The goal of pre-processing is to try to reduce unwanted variation in image due to lighting,
FOREGROUND DETECTION ON DEPTH MAPS USING SKELETAL REPRESENTATION OF OBJECT SILHOUETTES
 FOREGROUND DETECTION ON DEPTH MAPS USING SKELETAL REPRESENTATION OF OBJECT SILHOUETTES D. Beloborodov a, L. Mestetskiy a a Faculty of Computational Mathematics and Cybernetics, Lomonosov Moscow State University,
FOREGROUND DETECTION ON DEPTH MAPS USING SKELETAL REPRESENTATION OF OBJECT SILHOUETTES D. Beloborodov a, L. Mestetskiy a a Faculty of Computational Mathematics and Cybernetics, Lomonosov Moscow State University,
Computer Vision I. Announcements. Fourier Tansform. Efficient Implementation. Edge and Corner Detection. CSE252A Lecture 13.
 Announcements Edge and Corner Detection HW3 assigned CSE252A Lecture 13 Efficient Implementation Both, the Box filter and the Gaussian filter are separable: First convolve each row of input image I with
Announcements Edge and Corner Detection HW3 assigned CSE252A Lecture 13 Efficient Implementation Both, the Box filter and the Gaussian filter are separable: First convolve each row of input image I with
Matching. Compare region of image to region of image. Today, simplest kind of matching. Intensities similar.
 Matching Compare region of image to region of image. We talked about this for stereo. Important for motion. Epipolar constraint unknown. But motion small. Recognition Find object in image. Recognize object.
Matching Compare region of image to region of image. We talked about this for stereo. Important for motion. Epipolar constraint unknown. But motion small. Recognition Find object in image. Recognize object.
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Towards the completion of assignment 1
 Towards the completion of assignment 1 What to do for calibration What to do for point matching What to do for tracking What to do for GUI COMPSCI 773 Feature Point Detection Why study feature point detection?
Towards the completion of assignment 1 What to do for calibration What to do for point matching What to do for tracking What to do for GUI COMPSCI 773 Feature Point Detection Why study feature point detection?
Modify Panel. Flatten Tab
 AFM Image Processing Most images will need some post acquisition processing. A typical procedure is to: i) modify the image by flattening, using a planefit, and possibly also a mask, ii) analyzing the
AFM Image Processing Most images will need some post acquisition processing. A typical procedure is to: i) modify the image by flattening, using a planefit, and possibly also a mask, ii) analyzing the
CS 4495 Computer Vision. Linear Filtering 2: Templates, Edges. Aaron Bobick. School of Interactive Computing. Templates/Edges
 CS 4495 Computer Vision Linear Filtering 2: Templates, Edges Aaron Bobick School of Interactive Computing Last time: Convolution Convolution: Flip the filter in both dimensions (right to left, bottom to
CS 4495 Computer Vision Linear Filtering 2: Templates, Edges Aaron Bobick School of Interactive Computing Last time: Convolution Convolution: Flip the filter in both dimensions (right to left, bottom to
Motion Estimation for Video Coding Standards
 Motion Estimation for Video Coding Standards Prof. Ja-Ling Wu Department of Computer Science and Information Engineering National Taiwan University Introduction of Motion Estimation The goal of video compression
Motion Estimation for Video Coding Standards Prof. Ja-Ling Wu Department of Computer Science and Information Engineering National Taiwan University Introduction of Motion Estimation The goal of video compression
Image features. Image Features
 Image features Image features, such as edges and interest points, provide rich information on the image content. They correspond to local regions in the image and are fundamental in many applications in
Image features Image features, such as edges and interest points, provide rich information on the image content. They correspond to local regions in the image and are fundamental in many applications in
A model-based approach for tool tracking in laparoscopy
 A model-based approach for tool tracking in laparoscopy Potential applications and evaluation challenges Sandrine Voros (INSERM), TIMC-IMAG laboratory Computer Assisted Medical Interventions (CAMI) team
A model-based approach for tool tracking in laparoscopy Potential applications and evaluation challenges Sandrine Voros (INSERM), TIMC-IMAG laboratory Computer Assisted Medical Interventions (CAMI) team
Computer and Machine Vision
 Computer and Machine Vision Lecture Week 10 Part-2 Skeletal Models and Face Detection March 21, 2014 Sam Siewert Outline of Week 10 Lab #4 Overview Lab #5 and #6 Extended Lab Overview SIFT and SURF High
Computer and Machine Vision Lecture Week 10 Part-2 Skeletal Models and Face Detection March 21, 2014 Sam Siewert Outline of Week 10 Lab #4 Overview Lab #5 and #6 Extended Lab Overview SIFT and SURF High
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
Understanding Tracking and StroMotion of Soccer Ball
 Understanding Tracking and StroMotion of Soccer Ball Nhat H. Nguyen Master Student 205 Witherspoon Hall Charlotte, NC 28223 704 656 2021 rich.uncc@gmail.com ABSTRACT Soccer requires rapid ball movements.
Understanding Tracking and StroMotion of Soccer Ball Nhat H. Nguyen Master Student 205 Witherspoon Hall Charlotte, NC 28223 704 656 2021 rich.uncc@gmail.com ABSTRACT Soccer requires rapid ball movements.
Edge detection. Stefano Ferrari. Università degli Studi di Milano Elaborazione delle immagini (Image processing I)
") Edge detection Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini (Image processing I) academic year 2011 2012 Image segmentation Several image processing
Edge detection Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini (Image processing I) academic year 2011 2012 Image segmentation Several image processing
Scale Invariant Feature Transform
 Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Edge Detection. Today s reading. Cipolla & Gee on edge detection (available online) From Sandlot Science
 From Sandlot Science") Edge Detection From Sandlot Science Today s reading Cipolla & Gee on edge detection (available online) Project 1a assigned last Friday due this Friday Last time: Cross-correlation Let be the image, be
Edge Detection From Sandlot Science Today s reading Cipolla & Gee on edge detection (available online) Project 1a assigned last Friday due this Friday Last time: Cross-correlation Let be the image, be
Puzzle games (like Rubik s cube) solver
 solver") Puzzle games (like Rubik s cube) solver Vitalii Zakharov University of Tartu vitaliiz@ut.ee 1. INTRODUCTION This project is a continuation of the PTAM (Parallel Tracking and Mapping for Small AR Workspaces)
Puzzle games (like Rubik s cube) solver Vitalii Zakharov University of Tartu vitaliiz@ut.ee 1. INTRODUCTION This project is a continuation of the PTAM (Parallel Tracking and Mapping for Small AR Workspaces)
COS Lecture 10 Autonomous Robot Navigation
 COS 495 - Lecture 10 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 10 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
EN1610 Image Understanding Lab # 3: Edges
 EN1610 Image Understanding Lab # 3: Edges The goal of this fourth lab is to ˆ Understanding what are edges, and different ways to detect them ˆ Understand different types of edge detectors - intensity,
EN1610 Image Understanding Lab # 3: Edges The goal of this fourth lab is to ˆ Understanding what are edges, and different ways to detect them ˆ Understand different types of edge detectors - intensity,
HOG-based Pedestriant Detector Training
 HOG-based Pedestriant Detector Training evs embedded Vision Systems Srl c/o Computer Science Park, Strada Le Grazie, 15 Verona- Italy http: // www. embeddedvisionsystems. it Abstract This paper describes
HOG-based Pedestriant Detector Training evs embedded Vision Systems Srl c/o Computer Science Park, Strada Le Grazie, 15 Verona- Italy http: // www. embeddedvisionsystems. it Abstract This paper describes
Homework 4 Computer Vision CS 4731, Fall 2011 Due Date: Nov. 15, 2011 Total Points: 40
 Homework 4 Computer Vision CS 4731, Fall 2011 Due Date: Nov. 15, 2011 Total Points: 40 Note 1: Both the analytical problems and the programming assignments are due at the beginning of class on Nov 15,
Homework 4 Computer Vision CS 4731, Fall 2011 Due Date: Nov. 15, 2011 Total Points: 40 Note 1: Both the analytical problems and the programming assignments are due at the beginning of class on Nov 15,
Recognition of a Predefined Landmark Using Optical Flow Sensor/Camera
 Recognition of a Predefined Landmark Using Optical Flow Sensor/Camera Galiev Ilfat, Alina Garaeva, Nikita Aslanyan The Department of Computer Science & Automation, TU Ilmenau 98693 Ilmenau ilfat.galiev@tu-ilmenau.de;
Recognition of a Predefined Landmark Using Optical Flow Sensor/Camera Galiev Ilfat, Alina Garaeva, Nikita Aslanyan The Department of Computer Science & Automation, TU Ilmenau 98693 Ilmenau ilfat.galiev@tu-ilmenau.de;
Pupil Localization Algorithm based on Hough Transform and Harris Corner Detection
 Pupil Localization Algorithm based on Hough Transform and Harris Corner Detection 1 Chongqing University of Technology Electronic Information and Automation College Chongqing, 400054, China E-mail: zh_lian@cqut.edu.cn
Pupil Localization Algorithm based on Hough Transform and Harris Corner Detection 1 Chongqing University of Technology Electronic Information and Automation College Chongqing, 400054, China E-mail: zh_lian@cqut.edu.cn