An important feature of CLEO III track finding is the diagnostics package providing information on the conditions encountered & decisions met in selec
|
|
|
- Ezra Morgan
- 5 years ago
- Views:
Transcription
1 CLEO III track finding uses cell level information in the initial phase, does not depend on intrinsic device resolution, is ideal for high (radial) density, low precision, information. CLEO III track finding was developed for a small-cell drift chamber but is applicable to any detector with similar cell-level information. The goal of the initial phase is to find segments that one would see by eye, isolated anywhere in the chamber, in contrast to algorithms seeded by arcs defined by widely spaced (in radius) sets of hits. A TPC is a 3-dimensional device. However, after clustering of the pad signals in r-φ, and assigning the cluster position to the closest pad center, projected TPC cell-level information is similar to that of a small-cell drift chamber. This algorithm is readily applicable to a TPC. ( Course Z information can be used to reduce track and noise density that is projected onto the 2-D view. ) The found track segment. in yellow, is interrupted by the noise created by the looping track

















2 An important feature of CLEO III track finding is the diagnostics package providing information on the conditions encountered & decisions met in selecting track candidates at intermediate steps in the algorithm. It is used for program development and provides the ability to visually diagnose problems and pathologies Graphics features would translate well into JAVA. Zoom feature Cell information can be displayed for each cell. This can be device dependent.



















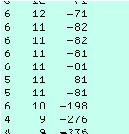

















3 The diagnostics package includes a logging feature that provides information on the successes and failures of the algorithm during the growth of a segment. The chart below provides details on the conditions that lead to stopping the short segment.
















4 I will describe some of the features of the algorithm before applying it to a TPC. Segment-finding can start at any layer and run outward or inward. It proceeds by adding cells satisfying tunable conditions of continuity and isolation. Here, the latter half of the track is found as a second segment.


























5 After all clean segments are found (within the z-projection road for a TPC application), well established segments can be extended into noisier regions. Two segments can be merged into another segment. Merge provides compensation for the tight hit selection requirements used in initial segment-finding.








.")







6 Segments are be selected, by order of quality, for further processing. Processing starts by fitting the cell locations to a hypothesis function (helix). Here, only the isolated cells (in white) are included in the fit. The orange cells are in a road but not yet in the fit. At this level, TPC data could be treated much like drift chamber data.



7 Processing continues using in the second phase using preliminary corrected position measurements. Final corrected cluster position measurements (e.g. including correction for track angle) would not be required because the track is well-defined at the cell information level. Local ambiguity resolution is used to determine the drift sign (not applicable to a TPC). Track segments defined in super-layers are matched to form a track meeting continuity requirements. (This is directly applicable to a TPC.) The residual display is used for diagnostics and development of the latter phases.



8 A small-cell drift chamber has time information for precise r-φ measurements, a drift distance sign ambiguity, and pulse height information. Stereo layers provide the z information. A TPC has time information for precise z measurements and pulse height and shape information. r-φ z hit information in both applications. In a TPC, the z projection is not coupled with r-φ because there is no sign ambiguity. Second phase hit selection is less complicated. The Z-projection. Both applications use a z fit to discriminate against bad initial-phase segments























9 CLEO III track finding, using fitted track segments in self selected isolated regions, is highly successful in extending tracks into complicated noisy regions. You see into the crowns of the trees because the trunks tell you where to look.


10 In a third phase, the track can be extended from the TPC into the silicon vertex detector. The 4 silicon hits have been selected as a group with the characteristic that the hits have a small residual spread within the group but may have a larger average residual relative to the established track. Silicon hits shown in the residual display


















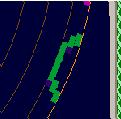
11 idealized detector, 100 layers, 2m o.r. 5mm x 15mm cells single pad hits, no clustering, no noise, no Z clustering, only 1 hit/cell 20 tracks in the jet, +/-.3 in φ, +/-.3 in cotθ Tracks are found, but there are many short segments. Yellow indicates current track, Pink, a previous track, Green, valid hits for pattern recognition. Reason for premature end of current track is indicated in the log. (The track was found to the last layer but the single hits look like stragglers. No changes to the basic pattern recognition. No Z information is used, yet








12 Hits are pre-selected to come from a z-projection cone. Yellow indicates current track, Green, valid hits for pattern rec., Purple, invalid, out-of-time. Tracks are resolved. Short segments may be ignored; they will be resolved in another projection. Note: the curler falls out of the road. Plan: scan through the z projection roads.
13 Convert to a format that is compatible with an existing Linear Collider detector simulation. Optimize the method of selecting/scanning the Z projection roads. Add TPC detector specific information to the 2 nd stage pattern recognition. Add clustering in r-φ and Z. Add noise. Add read-out specific (anode wire vs. GEM/MicroMegas) signal spreading characteristics. Build robustness into the algorithm against signal pathologies through tuning with the aid of the graphical diagnostics, Provide detailed, robust, analysis of track separation and pattern recognition efficiency ( as a function of readout characteristics, segmentation (r-φ and Z), track density, and noise level ) required to evaluate the (world) hardware development. First year expenditures: student support $44,000 computer 2,000 travel 10,000 $56,000
TPC Detector Response Simulation and Track Reconstruction
 TPC Detector Response Simulation and Track Reconstruction Physics goals at the Linear Collider drive the detector performance goals: charged particle track reconstruction resolution: δ reconstruction efficiency:
TPC Detector Response Simulation and Track Reconstruction Physics goals at the Linear Collider drive the detector performance goals: charged particle track reconstruction resolution: δ reconstruction efficiency:
TPC Detector Response Simulation and Track Reconstruction
 TPC Detector Response Simulation and Track Reconstruction Physics goals at the Linear Collider drive the detector performance goals: charged particle track reconstruction resolution: δ reconstruction efficiency:
TPC Detector Response Simulation and Track Reconstruction Physics goals at the Linear Collider drive the detector performance goals: charged particle track reconstruction resolution: δ reconstruction efficiency:
TPC Detector Response Simulation and Track Reconstruction
 TPC Detector Response Simulation and Track Reconstruction Physics goals at the Linear Collider drive the detector performance goals: charged particle track reconstruction resolution: δ(1/p)= ~ 4 x 10-5
TPC Detector Response Simulation and Track Reconstruction Physics goals at the Linear Collider drive the detector performance goals: charged particle track reconstruction resolution: δ(1/p)= ~ 4 x 10-5
TPC digitization and track reconstruction: efficiency dependence on noise
 TPC digitization and track reconstruction: efficiency dependence on noise Daniel Peterson, Cornell University, DESY, May-2007 A study of track reconstruction efficiency in a TPC using simulation of the
TPC digitization and track reconstruction: efficiency dependence on noise Daniel Peterson, Cornell University, DESY, May-2007 A study of track reconstruction efficiency in a TPC using simulation of the
Charged Particle Tracking at Cornell: Gas Detectors and Event Reconstruction
 Charged Particle Tracking at Cornell: Gas Detectors and Event Reconstruction Dan Peterson, Cornell University The Cornell group has constructed, operated and maintained the charged particle tracking detectors
Charged Particle Tracking at Cornell: Gas Detectors and Event Reconstruction Dan Peterson, Cornell University The Cornell group has constructed, operated and maintained the charged particle tracking detectors
Charged Particle Tracking at Cornell: Gas Detectors and Event Reconstruction
 Charged Particle Tracking at Cornell: Gas Detectors and Event Reconstruction Dan Peterson, Cornell University The Cornell group has constructed, operated and maintained the charged particle tracking detectors
Charged Particle Tracking at Cornell: Gas Detectors and Event Reconstruction Dan Peterson, Cornell University The Cornell group has constructed, operated and maintained the charged particle tracking detectors
8.882 LHC Physics. Track Reconstruction and Fitting. [Lecture 8, March 2, 2009] Experimental Methods and Measurements
![8.882 LHC Physics. Track Reconstruction and Fitting. [Lecture 8, March 2, 2009] Experimental Methods and Measurements](/thumbs/84/91007011.jpg "8.882 LHC Physics. Track Reconstruction and Fitting. [Lecture 8, March 2, 2009] Experimental Methods and Measurements") 8.882 LHC Physics Experimental Methods and Measurements Track Reconstruction and Fitting [Lecture 8, March 2, 2009] Organizational Issues Due days for the documented analyses project 1 is due March 12
8.882 LHC Physics Experimental Methods and Measurements Track Reconstruction and Fitting [Lecture 8, March 2, 2009] Organizational Issues Due days for the documented analyses project 1 is due March 12
Charged Particle Reconstruction in HIC Detectors
 Charged Particle Reconstruction in HIC Detectors Ralf-Arno Tripolt, Qiyan Li [http://de.wikipedia.org/wiki/marienburg_(mosel)] H-QM Lecture Week on Introduction to Heavy Ion Physics Kloster Marienburg/Mosel,
Charged Particle Reconstruction in HIC Detectors Ralf-Arno Tripolt, Qiyan Li [http://de.wikipedia.org/wiki/marienburg_(mosel)] H-QM Lecture Week on Introduction to Heavy Ion Physics Kloster Marienburg/Mosel,
PATHFINDER A track finding package based on Hough transformation
 LC-TOOL-2014-003 http://www-flc.desy.de/lcnotes PATHFINDER A track finding package based on Hough transformation Isa Heinze DESY, Hamburg February 24, 2014 Abstract PATHFINDER is a package which provides
LC-TOOL-2014-003 http://www-flc.desy.de/lcnotes PATHFINDER A track finding package based on Hough transformation Isa Heinze DESY, Hamburg February 24, 2014 Abstract PATHFINDER is a package which provides
PoS(High-pT physics09)036
036") Triggering on Jets and D 0 in HLT at ALICE 1 University of Bergen Allegaten 55, 5007 Bergen, Norway E-mail: st05886@alf.uib.no The High Level Trigger (HLT) of the ALICE experiment is designed to perform
Triggering on Jets and D 0 in HLT at ALICE 1 University of Bergen Allegaten 55, 5007 Bergen, Norway E-mail: st05886@alf.uib.no The High Level Trigger (HLT) of the ALICE experiment is designed to perform
PXD Simulation and Optimisation Studies
 PXD Simulation and Optimisation Studies Z. Drásal, A. Moll, K. Prothmann with special thanks to: C. Kiesling, A. Raspereza, Prague people Charles University Prague MPI Munich ILC Software Framework Summary
PXD Simulation and Optimisation Studies Z. Drásal, A. Moll, K. Prothmann with special thanks to: C. Kiesling, A. Raspereza, Prague people Charles University Prague MPI Munich ILC Software Framework Summary
LAr Event Reconstruction with the PANDORA Software Development Kit
 LAr Event Reconstruction with the PANDORA Software Development Kit Andy Blake, John Marshall, Mark Thomson (Cambridge University) UK Liquid Argon Meeting, Manchester, November 28 th 2012. From ILC/CLIC
LAr Event Reconstruction with the PANDORA Software Development Kit Andy Blake, John Marshall, Mark Thomson (Cambridge University) UK Liquid Argon Meeting, Manchester, November 28 th 2012. From ILC/CLIC
ALICE tracking system
 ALICE tracking system Marian Ivanov, GSI Darmstadt, on behalf of the ALICE Collaboration Third International Workshop for Future Challenges in Tracking and Trigger Concepts 1 Outlook Detector description
ALICE tracking system Marian Ivanov, GSI Darmstadt, on behalf of the ALICE Collaboration Third International Workshop for Future Challenges in Tracking and Trigger Concepts 1 Outlook Detector description
CMS Conference Report
 Available on CMS information server CMS CR 2005/021 CMS Conference Report 29 Septemebr 2005 Track and Vertex Reconstruction with the CMS Detector at LHC S. Cucciarelli CERN, Geneva, Switzerland Abstract
Available on CMS information server CMS CR 2005/021 CMS Conference Report 29 Septemebr 2005 Track and Vertex Reconstruction with the CMS Detector at LHC S. Cucciarelli CERN, Geneva, Switzerland Abstract
Strategy. Using Strategy 1
 Strategy Using Strategy 1 Scan Path / Strategy It is important to visualize the scan path you want for a feature before you begin taking points on your part. You want to try to place your points in a way
Strategy Using Strategy 1 Scan Path / Strategy It is important to visualize the scan path you want for a feature before you begin taking points on your part. You want to try to place your points in a way
A Topologic Approach to Particle Flow PandoraPFA
 A Topologic Approach to Particle Flow PandoraPFA Mark Thomson University of Cambridge This Talk: Philosophy The Algorithm Some First Results Conclusions/Outlook LCWS06 Bangalore 13/3/06 Mark Thomson 1
A Topologic Approach to Particle Flow PandoraPFA Mark Thomson University of Cambridge This Talk: Philosophy The Algorithm Some First Results Conclusions/Outlook LCWS06 Bangalore 13/3/06 Mark Thomson 1
π ± Charge Exchange Cross Section on Liquid Argon
 π ± Charge Exchange Cross Section on Liquid Argon Kevin Nelson REU Program, College of William and Mary Mike Kordosky College of William and Mary, Physics Dept. August 5, 2016 Abstract The observation
π ± Charge Exchange Cross Section on Liquid Argon Kevin Nelson REU Program, College of William and Mary Mike Kordosky College of William and Mary, Physics Dept. August 5, 2016 Abstract The observation
PoS(Baldin ISHEPP XXII)134
134") Implementation of the cellular automaton method for track reconstruction in the inner tracking system of MPD at NICA, G.A. Ososkov and A.I. Zinchenko Joint Institute of Nuclear Research, 141980 Dubna,
Implementation of the cellular automaton method for track reconstruction in the inner tracking system of MPD at NICA, G.A. Ososkov and A.I. Zinchenko Joint Institute of Nuclear Research, 141980 Dubna,
Real-time Analysis with the ALICE High Level Trigger.
 Real-time Analysis with the ALICE High Level Trigger C. Loizides 1,3, V.Lindenstruth 2, D.Röhrich 3, B.Skaali 4, T.Steinbeck 2, R. Stock 1, H. TilsnerK.Ullaland 3, A.Vestbø 3 and T.Vik 4 for the ALICE
Real-time Analysis with the ALICE High Level Trigger C. Loizides 1,3, V.Lindenstruth 2, D.Röhrich 3, B.Skaali 4, T.Steinbeck 2, R. Stock 1, H. TilsnerK.Ullaland 3, A.Vestbø 3 and T.Vik 4 for the ALICE
Classification of Hyperspectral Breast Images for Cancer Detection. Sander Parawira December 4, 2009
 1 Introduction Classification of Hyperspectral Breast Images for Cancer Detection Sander Parawira December 4, 2009 parawira@stanford.edu In 2009 approximately one out of eight women has breast cancer.
1 Introduction Classification of Hyperspectral Breast Images for Cancer Detection Sander Parawira December 4, 2009 parawira@stanford.edu In 2009 approximately one out of eight women has breast cancer.
Disentangling P ANDA s time-based data stream
 Disentangling P ANDA s time-based data stream M. Tiemens on behalf of the PANDA Collaboration KVI - Center For Advanced Radiation Technology, University of Groningen, Zernikelaan 25, 9747 AA Groningen,
Disentangling P ANDA s time-based data stream M. Tiemens on behalf of the PANDA Collaboration KVI - Center For Advanced Radiation Technology, University of Groningen, Zernikelaan 25, 9747 AA Groningen,
A Topologic Approach to Particle Flow PandoraPFA
 A Topologic Approach to Particle Flow PandoraPFA Mark Thomson University of Cambridge This Talk: Philosophy The Algorithm Some New Results Confusion Conclusions Outlook Cambridge 5/4/06 Mark Thomson 1
A Topologic Approach to Particle Flow PandoraPFA Mark Thomson University of Cambridge This Talk: Philosophy The Algorithm Some New Results Confusion Conclusions Outlook Cambridge 5/4/06 Mark Thomson 1
Stefania Beolè (Università di Torino e INFN) for the ALICE Collaboration. TIPP Chicago, June 9-14
 for the ALICE Collaboration. TIPP Chicago, June 9-14") ALICE SDD ITS performance with pp and Pb-Pb beams Stefania Beolè (Università di Torino e INFN) for the ALICE Collaboration - Chicago, June 9-14 Inner Tracking System (I) Six layers of silicon detectors
ALICE SDD ITS performance with pp and Pb-Pb beams Stefania Beolè (Università di Torino e INFN) for the ALICE Collaboration - Chicago, June 9-14 Inner Tracking System (I) Six layers of silicon detectors
FastSim tutorial for beginners
 FastSim tutorial for beginners Matteo Rama Laboratori Nazionali di Frascati 1st SuperB Collaboration meeting London, September 2011 Part I FastSim overview M. Rama - 1st SuperB Collaboration Meeting QMUL
FastSim tutorial for beginners Matteo Rama Laboratori Nazionali di Frascati 1st SuperB Collaboration meeting London, September 2011 Part I FastSim overview M. Rama - 1st SuperB Collaboration Meeting QMUL
Precision Timing in High Pile-Up and Time-Based Vertex Reconstruction
 Precision Timing in High Pile-Up and Time-Based Vertex Reconstruction Cedric Flamant (CERN Summer Student) - Supervisor: Adi Bornheim Division of High Energy Physics, California Institute of Technology,
Precision Timing in High Pile-Up and Time-Based Vertex Reconstruction Cedric Flamant (CERN Summer Student) - Supervisor: Adi Bornheim Division of High Energy Physics, California Institute of Technology,
The GTPC Package: Tracking and Analysis Software for GEM TPCs
 The GTPC Package: Tracking and Analysis Software for GEM TPCs Linear Collider TPC R&D Meeting LBNL, Berkeley, California (USA) 18-19 October, 003 Steffen Kappler Institut für Experimentelle Kernphysik,
The GTPC Package: Tracking and Analysis Software for GEM TPCs Linear Collider TPC R&D Meeting LBNL, Berkeley, California (USA) 18-19 October, 003 Steffen Kappler Institut für Experimentelle Kernphysik,
Fast pattern recognition with the ATLAS L1Track trigger for the HL-LHC
 Fast pattern recognition with the ATLAS L1Track trigger for the HL-LHC On behalf of the ATLAS Collaboration Uppsala Universitet E-mail: mikael.martensson@cern.ch ATL-DAQ-PROC-2016-034 09/01/2017 A fast
Fast pattern recognition with the ATLAS L1Track trigger for the HL-LHC On behalf of the ATLAS Collaboration Uppsala Universitet E-mail: mikael.martensson@cern.ch ATL-DAQ-PROC-2016-034 09/01/2017 A fast
GLAST tracking reconstruction Status Report
 GLAST collaboration meeting, UCSC June 22-24 1999 GLAST tracking reconstruction Status Report Bill Atwood, Jose A. Hernando, Robert P. Johnson, Hartmut Sadrozinski Naomi Cotton, Dennis Melton University
GLAST collaboration meeting, UCSC June 22-24 1999 GLAST tracking reconstruction Status Report Bill Atwood, Jose A. Hernando, Robert P. Johnson, Hartmut Sadrozinski Naomi Cotton, Dennis Melton University
CMS FPGA Based Tracklet Approach for L1 Track Finding
 CMS FPGA Based Tracklet Approach for L1 Track Finding Anders Ryd (Cornell University) On behalf of the CMS Tracklet Group Presented at AWLC June 29, 2017 Anders Ryd Cornell University FPGA Based L1 Tracking
CMS FPGA Based Tracklet Approach for L1 Track Finding Anders Ryd (Cornell University) On behalf of the CMS Tracklet Group Presented at AWLC June 29, 2017 Anders Ryd Cornell University FPGA Based L1 Tracking
Recognition and Measurement of Small Defects in ICT Testing
 19 th World Conference on Non-Destructive Testing 2016 Recognition and Measurement of Small Defects in ICT Testing Guo ZHIMIN, Ni PEIJUN, Zhang WEIGUO, Qi ZICHENG Inner Mongolia Metallic Materials Research
19 th World Conference on Non-Destructive Testing 2016 Recognition and Measurement of Small Defects in ICT Testing Guo ZHIMIN, Ni PEIJUN, Zhang WEIGUO, Qi ZICHENG Inner Mongolia Metallic Materials Research
Tracking and Vertex reconstruction at LHCb for Run II
 Tracking and Vertex reconstruction at LHCb for Run II Hang Yin Central China Normal University On behalf of LHCb Collaboration The fifth Annual Conference on Large Hadron Collider Physics, Shanghai, China
Tracking and Vertex reconstruction at LHCb for Run II Hang Yin Central China Normal University On behalf of LHCb Collaboration The fifth Annual Conference on Large Hadron Collider Physics, Shanghai, China
ATLAS ITk Layout Design and Optimisation
 ATLAS ITk Layout Design and Optimisation Noemi Calace noemi.calace@cern.ch On behalf of the ATLAS Collaboration 3rd ECFA High Luminosity LHC Experiments Workshop 3-6 October 2016 Aix-Les-Bains Overview
ATLAS ITk Layout Design and Optimisation Noemi Calace noemi.calace@cern.ch On behalf of the ATLAS Collaboration 3rd ECFA High Luminosity LHC Experiments Workshop 3-6 October 2016 Aix-Les-Bains Overview
Vertex Detector Working Group
 Vertex Detector Working Group Sunday, July 13, 3:30-5:30 p.m. 3:30-4:00 LCFI Status Report Chris Damerell, Rutherford Laboratory 4:00-4:30 CCD Radiation Damage Studies Olya Igonkina, Oregon 4:30-5:00 Status
Vertex Detector Working Group Sunday, July 13, 3:30-5:30 p.m. 3:30-4:00 LCFI Status Report Chris Damerell, Rutherford Laboratory 4:00-4:30 CCD Radiation Damage Studies Olya Igonkina, Oregon 4:30-5:00 Status
TEC single wire resolution
 L Note 87 TEC single wire resolution after calibration with the SMD Dimitri Bourilkov and Daniel Wagenaar This note presents a study of the single wire resolution of the L TEC for data taken in 99. For
L Note 87 TEC single wire resolution after calibration with the SMD Dimitri Bourilkov and Daniel Wagenaar This note presents a study of the single wire resolution of the L TEC for data taken in 99. For
Surface Rendering. Surface Rendering
 Surface Rendering Surface Rendering Introduce Mapping Methods - Texture Mapping - Environmental Mapping - Bump Mapping Go over strategies for - Forward vs backward mapping 2 1 The Limits of Geometric Modeling
Surface Rendering Surface Rendering Introduce Mapping Methods - Texture Mapping - Environmental Mapping - Bump Mapping Go over strategies for - Forward vs backward mapping 2 1 The Limits of Geometric Modeling
Tracking and compression techniques
 Tracking and compression techniques for ALICE HLT Anders Strand Vestbø The ALICE experiment at LHC The ALICE High Level Trigger (HLT) Estimated data rate (Central Pb-Pb, TPC only) 200 Hz * 75 MB = ~15
Tracking and compression techniques for ALICE HLT Anders Strand Vestbø The ALICE experiment at LHC The ALICE High Level Trigger (HLT) Estimated data rate (Central Pb-Pb, TPC only) 200 Hz * 75 MB = ~15
Status of the DCBA experiment
 Status of the DCBA experiment 9 November, 2016 Hidekazu Kakuno Tokyo Metropolitan University International Workshop on Double Beta Decay and Underground Science, DBD16 Osaka University, JAPAN bb experiments
Status of the DCBA experiment 9 November, 2016 Hidekazu Kakuno Tokyo Metropolitan University International Workshop on Double Beta Decay and Underground Science, DBD16 Osaka University, JAPAN bb experiments
13 Vectorizing. Overview
 13 Vectorizing Vectorizing tools are used to create vector data from scanned drawings or images. Combined with the display speed of Image Manager, these tools provide an efficient environment for data
13 Vectorizing Vectorizing tools are used to create vector data from scanned drawings or images. Combined with the display speed of Image Manager, these tools provide an efficient environment for data
Chapter 10. Conclusion Discussion
 Chapter 10 Conclusion 10.1 Discussion Question 1: Usually a dynamic system has delays and feedback. Can OMEGA handle systems with infinite delays, and with elastic delays? OMEGA handles those systems with
Chapter 10 Conclusion 10.1 Discussion Question 1: Usually a dynamic system has delays and feedback. Can OMEGA handle systems with infinite delays, and with elastic delays? OMEGA handles those systems with
LArTPC Reconstruction Challenges
 LArTPC Reconstruction Challenges LArTPC = Liquid Argon Time Projection Chamber Sowjanya Gollapinni (UTK) NuEclipse Workshop August 20 22, 2017 University of Tennessee, Knoxville LArTPC program the big
LArTPC Reconstruction Challenges LArTPC = Liquid Argon Time Projection Chamber Sowjanya Gollapinni (UTK) NuEclipse Workshop August 20 22, 2017 University of Tennessee, Knoxville LArTPC program the big
A New Variable-Resolution Associative Memory for High Energy Physics
 A New Variable-Resolution Associative Memory for High Energy Physics A. Annovi, S. Amerio, M. Beretta, E. Bossini, F. Crescioli, M. Dell'Orso, P. Giannetti, J. Hoff, T. Liu, D. Magalotti, M. Piendibene,
A New Variable-Resolution Associative Memory for High Energy Physics A. Annovi, S. Amerio, M. Beretta, E. Bossini, F. Crescioli, M. Dell'Orso, P. Giannetti, J. Hoff, T. Liu, D. Magalotti, M. Piendibene,
Direct photon measurements in ALICE. Alexis Mas for the ALICE collaboration
 Direct photon measurements in ALICE Alexis Mas for the ALICE collaboration 1 Outline I - Physics motivations for direct photon measurements II Direct photon measurements in ALICE i - Conversion method
Direct photon measurements in ALICE Alexis Mas for the ALICE collaboration 1 Outline I - Physics motivations for direct photon measurements II Direct photon measurements in ALICE i - Conversion method
Straw Detectors for the Large Hadron Collider. Dirk Wiedner
 Straw Detectors for the Large Hadron Collider 1 Tracking with Straws Bd π π? B-Mesons properties? Charge parity symmetry violation? 2 Tracking with Straws Bd proton LHC Start 2007 π proton 14 TeV π? B-Mesons
Straw Detectors for the Large Hadron Collider 1 Tracking with Straws Bd π π? B-Mesons properties? Charge parity symmetry violation? 2 Tracking with Straws Bd proton LHC Start 2007 π proton 14 TeV π? B-Mesons
High Level Trigger System for the LHC ALICE Experiment
 High Level Trigger System for the LHC ALICE Experiment H Helstrup 1, J Lien 1, V Lindenstruth 2,DRöhrich 3, B Skaali 4, T Steinbeck 2, K Ullaland 3, A Vestbø 3, and A Wiebalck 2 for the ALICE Collaboration
High Level Trigger System for the LHC ALICE Experiment H Helstrup 1, J Lien 1, V Lindenstruth 2,DRöhrich 3, B Skaali 4, T Steinbeck 2, K Ullaland 3, A Vestbø 3, and A Wiebalck 2 for the ALICE Collaboration
The Compact Muon Solenoid Experiment. Conference Report. Mailing address: CMS CERN, CH-1211 GENEVA 23, Switzerland
 Available on CMS information server CMS CR -2008/100 The Compact Muon Solenoid Experiment Conference Report Mailing address: CMS CERN, CH-1211 GENEVA 23, Switzerland 02 December 2008 (v2, 03 December 2008)
Available on CMS information server CMS CR -2008/100 The Compact Muon Solenoid Experiment Conference Report Mailing address: CMS CERN, CH-1211 GENEVA 23, Switzerland 02 December 2008 (v2, 03 December 2008)
Electron and Photon Reconstruction and Identification with the ATLAS Detector
 Electron and Photon Reconstruction and Identification with the ATLAS Detector IPRD10 S12 Calorimetry 7th-10th June 2010 Siena, Italy Marine Kuna (CPPM/IN2P3 Univ. de la Méditerranée) on behalf of the ATLAS
Electron and Photon Reconstruction and Identification with the ATLAS Detector IPRD10 S12 Calorimetry 7th-10th June 2010 Siena, Italy Marine Kuna (CPPM/IN2P3 Univ. de la Méditerranée) on behalf of the ATLAS
VME Data Acquisition System, ADC Read
 VME Data Acquisition System, ADC Read Abstract: UTA-HEP/LC 0023 Shashwat Udit University of Texas at Arlington August 25, 2008 This document presents the design concept and the functionality of the newly
VME Data Acquisition System, ADC Read Abstract: UTA-HEP/LC 0023 Shashwat Udit University of Texas at Arlington August 25, 2008 This document presents the design concept and the functionality of the newly
Physics and Detector Simulations. Norman Graf (SLAC) 2nd ECFA/DESY Workshop September 24, 2000
 2nd ECFA/DESY Workshop September 24, 2000") Physics and Detector Simulations Norman Graf (SLAC) 2nd ECFA/DESY Workshop September 24, 2000 Simulation studies for a future Linear Collider We believe that the physics case for the LC has been made.
Physics and Detector Simulations Norman Graf (SLAC) 2nd ECFA/DESY Workshop September 24, 2000 Simulation studies for a future Linear Collider We believe that the physics case for the LC has been made.
TABLES AND HASHING. Chapter 13
 Data Structures Dr Ahmed Rafat Abas Computer Science Dept, Faculty of Computer and Information, Zagazig University arabas@zu.edu.eg http://www.arsaliem.faculty.zu.edu.eg/ TABLES AND HASHING Chapter 13
Data Structures Dr Ahmed Rafat Abas Computer Science Dept, Faculty of Computer and Information, Zagazig University arabas@zu.edu.eg http://www.arsaliem.faculty.zu.edu.eg/ TABLES AND HASHING Chapter 13
Smarty Touch User Guide
 Smarty Touch User Guide Thank you for purchasing the Smarty Touch! We have put a lot of hard work into the production of this tuner, and we sincerely hope you enjoy it. This is a guide that explains most
Smarty Touch User Guide Thank you for purchasing the Smarty Touch! We have put a lot of hard work into the production of this tuner, and we sincerely hope you enjoy it. This is a guide that explains most
TEAMS National Competition High School Version Photometry 25 Questions
 TEAMS National Competition High School Version Photometry 25 Questions Page 1 of 14 Telescopes and their Lenses Although telescopes provide us with the extraordinary power to see objects miles away, the
TEAMS National Competition High School Version Photometry 25 Questions Page 1 of 14 Telescopes and their Lenses Although telescopes provide us with the extraordinary power to see objects miles away, the
Simulating the RF Shield for the VELO Upgrade
 LHCb-PUB-- March 7, Simulating the RF Shield for the VELO Upgrade T. Head, T. Ketel, D. Vieira. Universidade Federal do Rio de Janeiro (UFRJ), Rio de Janeiro, Brazil European Organization for Nuclear Research
LHCb-PUB-- March 7, Simulating the RF Shield for the VELO Upgrade T. Head, T. Ketel, D. Vieira. Universidade Federal do Rio de Janeiro (UFRJ), Rio de Janeiro, Brazil European Organization for Nuclear Research
Overview of the American Detector Models
 Overview of the American Detector Models Univ. of Oregon The American study groups have investigated two specific models Choosing any particular detector design is a compromise between competing constraints
Overview of the American Detector Models Univ. of Oregon The American study groups have investigated two specific models Choosing any particular detector design is a compromise between competing constraints
UNIVERSITY OF OSLO. Faculty of Mathematics and Natural Sciences
 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam: INF 4300 / INF 9305 Digital image analysis Date: Thursday December 21, 2017 Exam hours: 09.00-13.00 (4 hours) Number of pages: 8 pages
UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam: INF 4300 / INF 9305 Digital image analysis Date: Thursday December 21, 2017 Exam hours: 09.00-13.00 (4 hours) Number of pages: 8 pages
Cell Clustering Using Shape and Cell Context. Descriptor
 Cell Clustering Using Shape and Cell Context Descriptor Allison Mok: 55596627 F. Park E. Esser UC Irvine August 11, 2011 Abstract Given a set of boundary points from a 2-D image, the shape context captures
Cell Clustering Using Shape and Cell Context Descriptor Allison Mok: 55596627 F. Park E. Esser UC Irvine August 11, 2011 Abstract Given a set of boundary points from a 2-D image, the shape context captures
Adaptive Point Cloud Rendering
 1 Adaptive Point Cloud Rendering Project Plan Final Group: May13-11 Christopher Jeffers Eric Jensen Joel Rausch Client: Siemens PLM Software Client Contact: Michael Carter Adviser: Simanta Mitra 4/29/13
1 Adaptive Point Cloud Rendering Project Plan Final Group: May13-11 Christopher Jeffers Eric Jensen Joel Rausch Client: Siemens PLM Software Client Contact: Michael Carter Adviser: Simanta Mitra 4/29/13
3D-Triplet Tracking for LHC and Future High Rate Experiments
 3D-Triplet Tracking for LHC and Future High Rate Experiments André Schöning Physikalisches Institut, Universität Heidelberg Workshop on Intelligent Trackers WIT 2014 University of Pennsylvania May 14-16,
3D-Triplet Tracking for LHC and Future High Rate Experiments André Schöning Physikalisches Institut, Universität Heidelberg Workshop on Intelligent Trackers WIT 2014 University of Pennsylvania May 14-16,
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong)
") Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Geometric Modeling Mortenson Chapter 11. Complex Model Construction
 Geometric Modeling 91.580.201 Mortenson Chapter 11 Complex Model Construction Topics Topology of Models Connectivity and other intrinsic properties Graph-Based Models Emphasize topological structure Boolean
Geometric Modeling 91.580.201 Mortenson Chapter 11 Complex Model Construction Topics Topology of Models Connectivity and other intrinsic properties Graph-Based Models Emphasize topological structure Boolean
Performance Testing and Tuning of Kalman Track-Fitting for CLEO III
 Performance Testing and Tuning of Kalman Track-Fitting for CLEO III Daniela Silva Department of Mathematics, Wayne State University, Detroit, MI, 48202 Abstract CLEO III will use a Kalman track fitter.
Performance Testing and Tuning of Kalman Track-Fitting for CLEO III Daniela Silva Department of Mathematics, Wayne State University, Detroit, MI, 48202 Abstract CLEO III will use a Kalman track fitter.
Tutorial on Range and Bearing Estimation
 Tutorial on Range and Bearing Estimation Basia Korel (bkorel@cs.brown.edu) October 30, 2009 1 Introduction Estimating the range and bearing from the robot to a landmark object is a necessary component
Tutorial on Range and Bearing Estimation Basia Korel (bkorel@cs.brown.edu) October 30, 2009 1 Introduction Estimating the range and bearing from the robot to a landmark object is a necessary component
Linescan System Design for Robust Web Inspection
 Linescan System Design for Robust Web Inspection Vision Systems Design Webinar, December 2011 Engineered Excellence 1 Introduction to PVI Systems Automated Test & Measurement Equipment PC and Real-Time
Linescan System Design for Robust Web Inspection Vision Systems Design Webinar, December 2011 Engineered Excellence 1 Introduction to PVI Systems Automated Test & Measurement Equipment PC and Real-Time
436 Nuclear Instruments and Methods in Physics Research A278 (1989) North-Holland, Amsterdam. 2. The detector
 North-Holland, Amsterdam. 2. The detector") 436 Nuclear Instruments and Methods in Physics Research A278 (1989) 436-440 North-Holland, Amsterdam VLSI STRUCTURES FOR TRACK FINDING Mauro DELL'ORSO Dipartimento di Fisica, Università di Pisa, Piazza
436 Nuclear Instruments and Methods in Physics Research A278 (1989) 436-440 North-Holland, Amsterdam VLSI STRUCTURES FOR TRACK FINDING Mauro DELL'ORSO Dipartimento di Fisica, Università di Pisa, Piazza
Updates to the Circle Hough Trackfinding Algorithm
 Updates to the Circle Hough Trackfinding Algorithm L. BIANCHI PANDA CM58 HIM, Mainz Sep 14, 16 Circle Hough Algorithm Circle Hough algorithm principles Generate all possible tracks Accumulate track parameters
Updates to the Circle Hough Trackfinding Algorithm L. BIANCHI PANDA CM58 HIM, Mainz Sep 14, 16 Circle Hough Algorithm Circle Hough algorithm principles Generate all possible tracks Accumulate track parameters
HOUGH TRANSFORM CS 6350 C V
 HOUGH TRANSFORM CS 6350 C V HOUGH TRANSFORM The problem: Given a set of points in 2-D, find if a sub-set of these points, fall on a LINE. Hough Transform One powerful global method for detecting edges
HOUGH TRANSFORM CS 6350 C V HOUGH TRANSFORM The problem: Given a set of points in 2-D, find if a sub-set of these points, fall on a LINE. Hough Transform One powerful global method for detecting edges
Basic MicroStation Training Outline
 12:30 DAY 1 Equipment Review Workstation, monitor, keyboard File server, Plot server, STATE server Drive Assignments Shortcut Menu General overview of commands Explorer Managing Folders & Files MicroStation
12:30 DAY 1 Equipment Review Workstation, monitor, keyboard File server, Plot server, STATE server Drive Assignments Shortcut Menu General overview of commands Explorer Managing Folders & Files MicroStation
CRF Based Point Cloud Segmentation Jonathan Nation
 CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
CPSC 340: Machine Learning and Data Mining. Density-Based Clustering Fall 2015
 CPSC 340: Machine Learning and Data Mining Density-Based Clustering Fall 2015 Admin Tutorials today. Office hours tomorrow Assignment 2 due Friday. Steps of k-means++: K-Means++ 1. Select initial mean
CPSC 340: Machine Learning and Data Mining Density-Based Clustering Fall 2015 Admin Tutorials today. Office hours tomorrow Assignment 2 due Friday. Steps of k-means++: K-Means++ 1. Select initial mean
Intersection of an Oriented Box and a Cone
 Intersection of an Oriented Box and a Cone David Eberly, Geometric Tools, Redmond WA 98052 https://www.geometrictools.com/ This work is licensed under the Creative Commons Attribution 4.0 International
Intersection of an Oriented Box and a Cone David Eberly, Geometric Tools, Redmond WA 98052 https://www.geometrictools.com/ This work is licensed under the Creative Commons Attribution 4.0 International
Towards direct motion and shape parameter recovery from image sequences. Stephen Benoit. Ph.D. Thesis Presentation September 25, 2003
 Towards direct motion and shape parameter recovery from image sequences Stephen Benoit Ph.D. Thesis Presentation September 25, 2003 September 25, 2003 Towards direct motion and shape parameter recovery
Towards direct motion and shape parameter recovery from image sequences Stephen Benoit Ph.D. Thesis Presentation September 25, 2003 September 25, 2003 Towards direct motion and shape parameter recovery
Cover Page. Abstract ID Paper Title. Automated extraction of linear features from vehicle-borne laser data
 Cover Page Abstract ID 8181 Paper Title Automated extraction of linear features from vehicle-borne laser data Contact Author Email Dinesh Manandhar (author1) dinesh@skl.iis.u-tokyo.ac.jp Phone +81-3-5452-6417
Cover Page Abstract ID 8181 Paper Title Automated extraction of linear features from vehicle-borne laser data Contact Author Email Dinesh Manandhar (author1) dinesh@skl.iis.u-tokyo.ac.jp Phone +81-3-5452-6417
Selective Space Structures Manual
 Selective Space Structures Manual February 2017 CONTENTS 1 Contents 1 Overview and Concept 4 1.1 General Concept........................... 4 1.2 Modules................................ 6 2 The 3S Generator
Selective Space Structures Manual February 2017 CONTENTS 1 Contents 1 Overview and Concept 4 1.1 General Concept........................... 4 1.2 Modules................................ 6 2 The 3S Generator
The Compact Muon Solenoid Experiment. CMS Note. Mailing address: CMS CERN, CH-1211 GENEVA 23, Switzerland
 Available on CMS information server CMS NOTE 998/4 The Compact Muon Solenoid Experiment CMS Note Mailing address: CMS CERN, CH-2 GENEVA 23, Switzerland 29 July 998 Muon DTBX Chamber Trigger Simulation
Available on CMS information server CMS NOTE 998/4 The Compact Muon Solenoid Experiment CMS Note Mailing address: CMS CERN, CH-2 GENEVA 23, Switzerland 29 July 998 Muon DTBX Chamber Trigger Simulation
Introduction to Indexing R-trees. Hong Kong University of Science and Technology
 Introduction to Indexing R-trees Dimitris Papadias Hong Kong University of Science and Technology 1 Introduction to Indexing 1. Assume that you work in a government office, and you maintain the records
Introduction to Indexing R-trees Dimitris Papadias Hong Kong University of Science and Technology 1 Introduction to Indexing 1. Assume that you work in a government office, and you maintain the records
Revolve Vertices. Axis of revolution. Angle of revolution. Edge sense. Vertex to be revolved. Figure 2-47: Revolve Vertices operation
 Revolve Vertices The Revolve Vertices operation (edge create revolve command) creates circular arc edges or helixes by revolving existing real and/or non-real vertices about a specified axis. The command
Revolve Vertices The Revolve Vertices operation (edge create revolve command) creates circular arc edges or helixes by revolving existing real and/or non-real vertices about a specified axis. The command
CMS Muon Meeting. HLT DT Calibration. (on Data Challenge Dedicated Stream) G. Cerminara N. Amapane M. Giunta
 G. Cerminara N. Amapane M. Giunta") CMS Muon Meeting HLT DT Calibration (on Data Challenge Dedicated Stream) G. Cerminara N. Amapane M. Giunta Overview Goal: develop the tools for HLT calibration for DTs in ORCA Calibration algorithms +
CMS Muon Meeting HLT DT Calibration (on Data Challenge Dedicated Stream) G. Cerminara N. Amapane M. Giunta Overview Goal: develop the tools for HLT calibration for DTs in ORCA Calibration algorithms +
CPSC 340: Machine Learning and Data Mining. Density-Based Clustering Fall 2016
 CPSC 340: Machine Learning and Data Mining Density-Based Clustering Fall 2016 Assignment 1 : Admin 2 late days to hand it in before Wednesday s class. 3 late days to hand it in before Friday s class. 0
CPSC 340: Machine Learning and Data Mining Density-Based Clustering Fall 2016 Assignment 1 : Admin 2 late days to hand it in before Wednesday s class. 3 late days to hand it in before Friday s class. 0
VERY HIGH VOLTAGE CONTROL FOR ALICE TPC
 VERY HIGH VOLTAGE CONTROL FOR ALICE TPC André Augustinus 1, Joachim Baechler 1, Marco Boccioli 1, Uli Frankenfeld 2, Lennart Jirdén 1 1 CERN, Geneva, Switzerland; 2 GSI, Darmstadt, Germany ABSTRACT The
VERY HIGH VOLTAGE CONTROL FOR ALICE TPC André Augustinus 1, Joachim Baechler 1, Marco Boccioli 1, Uli Frankenfeld 2, Lennart Jirdén 1 1 CERN, Geneva, Switzerland; 2 GSI, Darmstadt, Germany ABSTRACT The
Applications of Piezo Actuators for Space Instrument Optical Alignment
 Year 4 University of Birmingham Presentation Applications of Piezo Actuators for Space Instrument Optical Alignment Michelle Louise Antonik 520689 Supervisor: Prof. B. Swinyard Outline of Presentation
Year 4 University of Birmingham Presentation Applications of Piezo Actuators for Space Instrument Optical Alignment Michelle Louise Antonik 520689 Supervisor: Prof. B. Swinyard Outline of Presentation
DELTA TAU Data Systems, Inc.
 DELTA TAU Data Systems, Inc. Last revision: 12/5/01 Why PMAC Controllers Are Easy To Use Delta Tau s PMAC and Turbo PMAC families of controllers justly have the reputation as being the most powerful and
DELTA TAU Data Systems, Inc. Last revision: 12/5/01 Why PMAC Controllers Are Easy To Use Delta Tau s PMAC and Turbo PMAC families of controllers justly have the reputation as being the most powerful and
Last week. Multi-Frame Structure from Motion: Multi-View Stereo. Unknown camera viewpoints
 Last week Multi-Frame Structure from Motion: Multi-View Stereo Unknown camera viewpoints Last week PCA Today Recognition Today Recognition Recognition problems What is it? Object detection Who is it? Recognizing
Last week Multi-Frame Structure from Motion: Multi-View Stereo Unknown camera viewpoints Last week PCA Today Recognition Today Recognition Recognition problems What is it? Object detection Who is it? Recognizing
Alex Li 11/20/2009. Chris Wojtan, Nils Thurey, Markus Gross, Greg Turk
 Alex Li 11/20/2009 Chris Wojtan, Nils Thurey, Markus Gross, Greg Turk duction Overview of Lagrangian of Topological s Altering the Topology 2 Presents a method for accurately tracking the moving surface
Alex Li 11/20/2009 Chris Wojtan, Nils Thurey, Markus Gross, Greg Turk duction Overview of Lagrangian of Topological s Altering the Topology 2 Presents a method for accurately tracking the moving surface
Scanner Parameter Estimation Using Bilevel Scans of Star Charts
 ICDAR, Seattle WA September Scanner Parameter Estimation Using Bilevel Scans of Star Charts Elisa H. Barney Smith Electrical and Computer Engineering Department Boise State University, Boise, Idaho 8375
ICDAR, Seattle WA September Scanner Parameter Estimation Using Bilevel Scans of Star Charts Elisa H. Barney Smith Electrical and Computer Engineering Department Boise State University, Boise, Idaho 8375
TEAMS National Competition Middle School Version Photometry 25 Questions
 TEAMS National Competition Middle School Version Photometry 25 Questions Page 1 of 13 Telescopes and their Lenses Although telescopes provide us with the extraordinary power to see objects miles away,
TEAMS National Competition Middle School Version Photometry 25 Questions Page 1 of 13 Telescopes and their Lenses Although telescopes provide us with the extraordinary power to see objects miles away,
Three-Dimensional Motion Tracking using Clustering
 Three-Dimensional Motion Tracking using Clustering Andrew Zastovnik and Ryan Shiroma Dec 11, 2015 Abstract Tracking the position of an object in three dimensional space is a fascinating problem with many
Three-Dimensional Motion Tracking using Clustering Andrew Zastovnik and Ryan Shiroma Dec 11, 2015 Abstract Tracking the position of an object in three dimensional space is a fascinating problem with many
GEM chambers for SoLID Nilanga Liyanage. University of Virginia
 GEM chambers for SoLID Nilanga Liyanage University of Virginia PVDIS GEM configuration Current proposal to instrument locations 4, 5, 6, 7, and 8 with GEM: need to determine the number of GEM layers required
GEM chambers for SoLID Nilanga Liyanage University of Virginia PVDIS GEM configuration Current proposal to instrument locations 4, 5, 6, 7, and 8 with GEM: need to determine the number of GEM layers required
Performance of the GlueX Detector Systems
 Performance of the GlueX Detector Systems GlueX-doc-2775 Gluex Collaboration August 215 Abstract This document summarizes the status of calibration and performance of the GlueX detector as of summer 215.
Performance of the GlueX Detector Systems GlueX-doc-2775 Gluex Collaboration August 215 Abstract This document summarizes the status of calibration and performance of the GlueX detector as of summer 215.
Modelling of non-gaussian tails of multiple Coulomb scattering in track fitting with a Gaussian-sum filter
 Modelling of non-gaussian tails of multiple Coulomb scattering in track fitting with a Gaussian-sum filter A. Strandlie and J. Wroldsen Gjøvik University College, Norway Outline Introduction A Gaussian-sum
Modelling of non-gaussian tails of multiple Coulomb scattering in track fitting with a Gaussian-sum filter A. Strandlie and J. Wroldsen Gjøvik University College, Norway Outline Introduction A Gaussian-sum
Constrained Diffusion Limited Aggregation in 3 Dimensions
 Constrained Diffusion Limited Aggregation in 3 Dimensions Paul Bourke Swinburne University of Technology P. O. Box 218, Hawthorn Melbourne, Vic 3122, Australia. Email: pdb@swin.edu.au Abstract Diffusion
Constrained Diffusion Limited Aggregation in 3 Dimensions Paul Bourke Swinburne University of Technology P. O. Box 218, Hawthorn Melbourne, Vic 3122, Australia. Email: pdb@swin.edu.au Abstract Diffusion
Visualizing Change with Colour Gradient Approximations
 Visualizing Change with Colour Gradient Approximations by Ben Kenwright 1 What is the problem? Typically we have a scalar value ranging from a minimum to a maximum; these values are usually scaled to between
Visualizing Change with Colour Gradient Approximations by Ben Kenwright 1 What is the problem? Typically we have a scalar value ranging from a minimum to a maximum; these values are usually scaled to between
Design of the new ATLAS Inner Tracker (ITk) for the High Luminosity LHC
 for the High Luminosity LHC") Design of the new ATLAS Inner Tracker (ITk) for the High Luminosity LHC Jike Wang (DESY) for the ATLAS Collaboration May/2017, TIPP 2017 LHC Machine Schedule In year 2015, ATLAS and CMS went into Run2
Design of the new ATLAS Inner Tracker (ITk) for the High Luminosity LHC Jike Wang (DESY) for the ATLAS Collaboration May/2017, TIPP 2017 LHC Machine Schedule In year 2015, ATLAS and CMS went into Run2
Last update: May 4, Vision. CMSC 421: Chapter 24. CMSC 421: Chapter 24 1
 Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
Final Exam Study Guide
 Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
Spectral analysis of non-stationary CT noise
 Spectral analysis of non-stationary CT noise Kenneth M. Hanson Los Alamos Scientific Laboratory Int. Symposium and Course on Computed Tomography, Las Vegas, April 7-11, 1980 This presentation available
Spectral analysis of non-stationary CT noise Kenneth M. Hanson Los Alamos Scientific Laboratory Int. Symposium and Course on Computed Tomography, Las Vegas, April 7-11, 1980 This presentation available
AN100 v1.4. EtherCAT network synchronization. Distributed clocks
 AN100 v1.4 EtherCAT network synchronization Many EtherCAT systems benefit greatly from a tight synchronization of devices running on the network. Synchronization is particularly important when drives are
AN100 v1.4 EtherCAT network synchronization Many EtherCAT systems benefit greatly from a tight synchronization of devices running on the network. Synchronization is particularly important when drives are
Akrometrix Testing Applications
 Akrometrix Optical Techniques: Akrometrix Testing Applications Three full-field optical techniques, shadow moiré, digital image correlation (DIC), and fringe projection (performed by the DFP) are used
Akrometrix Optical Techniques: Akrometrix Testing Applications Three full-field optical techniques, shadow moiré, digital image correlation (DIC), and fringe projection (performed by the DFP) are used
MIP Reconstruction Techniques and Minimum Spanning Tree Clustering
 SLAC-PUB-11359 July 25 MIP Reconstruction Techniques and Minimum Spanning Tree Clustering Wolfgang F. Mader The University of Iowa, 23 Van Allen Hall, 52242 Iowa City, IA The development of a tracking
SLAC-PUB-11359 July 25 MIP Reconstruction Techniques and Minimum Spanning Tree Clustering Wolfgang F. Mader The University of Iowa, 23 Van Allen Hall, 52242 Iowa City, IA The development of a tracking
Forward Time-of-Flight Detector Efficiency for CLAS12
 Forward Time-of-Flight Detector Efficiency for CLAS12 D.S. Carman, Jefferson Laboratory ftof eff.tex May 29, 2014 Abstract This document details an absolute hit efficiency study of the FTOF panel-1a and
Forward Time-of-Flight Detector Efficiency for CLAS12 D.S. Carman, Jefferson Laboratory ftof eff.tex May 29, 2014 Abstract This document details an absolute hit efficiency study of the FTOF panel-1a and
How to add a chip socket into your chipable ECU
 How to add a chip socket into your chipable ECU 1 / 7 In the tuning world if you decide that you would like to keep the stock ECU and just adjust the maps contained within then this is the guide for you.
How to add a chip socket into your chipable ECU 1 / 7 In the tuning world if you decide that you would like to keep the stock ECU and just adjust the maps contained within then this is the guide for you.
1 INTRODUCTION. Solder paste deposits on grid array of soldering pads. SPI system integration in a PCB assembly production line
 1 INTRODUCTION Test Research Inc. (TRI) designs, manufactures and markets precision test equipment for the world s leading electronics manufacturing service (EMS) companies. Product lines include Automated
1 INTRODUCTION Test Research Inc. (TRI) designs, manufactures and markets precision test equipment for the world s leading electronics manufacturing service (EMS) companies. Product lines include Automated