SPARSE REPRESENTATION AND AUTOFOCUS FOR ISAR AND SPOTLIGHT SAR IMAGING
|
|
|
- Christal Sutton
- 6 years ago
- Views:
Transcription


1 SAR 2012 SPARSE REPRESENTATION AND AUTOFOCUS FOR ISAR AND SPOTLIGHT SAR IMAGING February 2012, UCLA Joachim Ender DIrector of the Fraunhofer-Institute for High Frequency Physics and Radar Techniques FHR, Wachtberg, Germany Professor at the University of Siegen, Senior Member IEEE Site Wachtberg-Villip FHR: Radar research since 1957 Site Wachtberg-Werthhoven
2 OUTLINE Introduction: Challenges for autofocus Introduction to three imaging systems of FHR Examples of compressed sensing applied to radar Signal model A review of polar reformatting Sparse reconstruction for perfectly known motion / rotation Autofocus using sparse reconstruction A three step approach to autofocus Rough estimation of the range history Alignment of partial images, improvement of motion estimate Retrieval of phase and motion parameters Summary and outlook
3 OUTLINE Introduction: Challenges for autofocus Examples of compressed sensing applied to radar An example of compressed sensing applied to radar imaging Signal model A review of polar reformatting Sparse reconstruction for perfectly known motion / rotation Autofocus using sparse reconstruction A three step approach to autofocus Rough estimation of the range history Alignment of partial images, improvement of motion estimate Retrieval of phase and motion parameters Summary and outlook
4 INTRODUCTION: CHALLENGES FOR AUTOFOCUS Objective: ISAR Imaging of moving objects from stationary or moving platforms Spotlight SAR with ultra-high resolution Desired: Super resolved images of sparse objects/scenes via compressed sensing Here, the emphasis is not on data reduction, but on high quality images Problem: Translational and rotational motion of object not known Trajectory of radar platform not known Roadmap to solution: Use CS and subspace techniques for the retrieval of phase histories and correct motion/rotation estimation
5 INTRODUCTION: CHALLENGES FOR AUTOFOCUS Problem statement in a two-dimensional geometry b(t) Object moves along a not perfectly known trajectory Object rotates in a not perfectly known way Based on the radar echoes, image this object and improve the motion estimate! Could a 'sparse reflectivity' (with some 'prominent' point like scatterers) help?
6 INTRODUCTION: CHALLENGES FOR AUTOFOCUS Relations between translational and rotational history In real applications, the orientation history may be coupled to the translational history (for instance, the length axis of ground moving vehicles will normally be orientated tangentially to the path). For airplanes the situation is a little more complicated since the velocity of the wind has to be taken into account. For this type of target the geometry should be extended to the third dimension, as well as for ships. Though the motion of space objects is very smooth and the signals are nearly free from clutter, difficult situations occur e.g. for space objects shortly before immersing into the atmosphere.
7 OUTLINE Introduction: Challenges for autofocus Introduction to three imaging systems of FHR Examples of compressed sensing applied to radar Signal model A review of polar reformatting Sparse reconstruction for perfectly known motion / rotation Autofocus using sparse reconstruction A three step approach to autofocus Rough estimation of the range history Alignment of partial images, improvement of motion estimate Retrieval of phase and motion parameters Summary and outlook



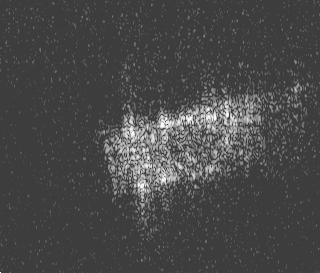
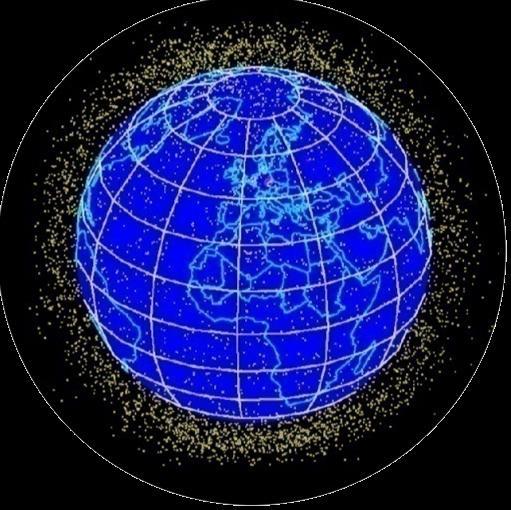
8 1. FRAUNHOFER RADAR FOR SPACE OBSERVATION TIRA: Tracking and Imaging Radar TIRA Analysis of space debris Imaging of space objects Space Shuttle at a distance > 650 km TIRA system



9 1. FRAUNHOFER RADAR FOR SPACE OBSERVATION TIRA: Tracking and Imaging Radar L band tracking radar Ku band imaging radar Frequency Pulse power 1.33 GHz 1.5 MW Frequency 16.7 GHz Pulse power 10 kw NERCS range 1 pulse Antenna 2 cm 1,000 km 40 cm 10,000 km Dish antenna Cassegrain system Moving mass 34 m 240 t Bandwidth Resolution 1.6 GHz 9.4 cm



 GMT imaging (ISAR)")
10 2. FRAUNHOFER MULTIFUNCTION SAR/MTI RADAR PAMIR (Phased Array Multifunction Imaging Radar) Demonstration of surveillance with multifunction phased-array radar > 30 % b rel deg Stripmap, spotlight and sliding spotlight SAR High resolution interferometric SAR Ground moving target indication (GMTI) GMT imaging (ISAR) Bistatic SAR

11 PAMIR: HIGH RESOLUTION SAR INTERFEROMETRY IN URBAN AREAS DEM of Karlsruhe

12 BISTATIC FORWARD LOOKING SAR Bistatic SAR opens (in contrary to the monostatic case) the possibility to image in a forward looking geometry Interesting application for looking through dense clouds also at night - and recognize the runway Problem: Flight geometry has to be suitable

 I.")

13 BISTATIC FORWARD LOOKING SAR EXPERIMENTAL VERIFICATION (TerraSAR-X / PAMIR) I. Walterscheid et al: Bistatic Spaceborne-Airborne Forward-looking SAR, EUSAR 2010, Aachen


14 PAMIR: Ground moving target indication & tracking via Scan- MTI and Space- Time Adaptive Processing (STAP)

15 Gallery Doppler Range ISAR-Image


")

16 3. FRAUNHOFER MM-WAVE RADAR COBRA Ultra high resolution imaging at 220 GHz (Turntable) ISAR-Imaging at 220 GHz, 8 GHz Bandwidth (1,7 cm resolution), range 170 m



17 NEAR RANGE MINIATURIZED SAR (1,5 kg) AT 94 GHz SUMATRA-94 (FHR)
18 OUTLINE Introduction: Challenges for autofocus Introduction to three imaging systems of FHR Examples of compressed sensing applied to radar Signal model A review of polar reformatting Sparse reconstruction for perfectly known motion / rotation Autofocus using sparse reconstruction A three step approach to autofocus Rough estimation of the range history Alignment of partial images, improvement of motion estimate Retrieval of phase and motion parameters Summary and outlook
 N_range=1024, N_azim=1697 1.")


19 AN EXAMPLE OF CS APPLIED TO RADAR IMAGING ISAR imaging with CS applied to cross-range (TIRA) N_range=1024, N_azim= samples! N_range=1024, N_azim=70 matched filter N_range=1024, N_azim=70 compressed sensing Reduction factor 25! Joachim H.G. Ender, On compressive sensing applied to radar, Signal Processing, Volume 90, Issue 5, May 2010, Pages
20 COMPRESSIVE RADAR Hypothetic radar systems with CS for range compression Stepped frequency in one pulse Simultaneous transmission QM f 0 QDM f 1 f 2 f 0 QDM s(t) f M consecutive frequencies f 1 f 2 f M f M f f 1 f 2 f M b t b t T Data rate M 2 /T c.s. f s CS algorithm T f s Time bandwidth product Data rate 1000, 50 frequencies: reduction M/T c.s. factor 20! CS algorithm
21 COMPRESSIVE RADAR Example: DOA estimation using a thinned array - simulation Circular aperture, randomly chosen element positions with uniform distribution Element distribution of CS array Radius Number elements (M) l Number of elements for Nyquist array 500 Number of targets (S) 5 Surveillance area u <= 0.5 Raster spacing in directional plane Number of grid points 2000 SNR 0.25 beamwidths 30 db


22 COMPRESSIVE RADAR Example: DOA estimation of five flying airplanes (simulation) Conventional beamformer Compressive Sensing
23 COMPRESSIVE RADAR Sparsity of radar tasks, applicability of CS Radar task Scene sparsity Acquisition sparsity Airspace surveillance MTI, also airborne Range profiles of isolated vehicles ISAR for isolated vehicles Rem arks Only a few targets Thinned array Wide transmit beam Only a few targets Only a few dominant scatterers Only a few dominant scatterers Thinned sampling in slow time RF frequency band thinned to a few distinct frequencies Thinning of RF frequencies and/or pulses Clutter suppression before If necessary, preceding clutter suppression If necessary, preceding clutter suppression Applic ability SAR, basic mode Generally not sparse - Image compr SAR tomography Only a few elevation angles with reflections Across track array, number of tracks Calibration? +++
24 COMPRESSIVE RADAR Sparsity of radar tasks, applicability of CS Radar task Scene sparsity Acquisition sparsity MIMO SAR/ISAR Single scatterers Limited number of Tx/Rx units Rem arks Putting together MN images ATR A few features + Applic ability ++
25 OUTLINE Introduction: Challenges for autofocus Introduction to three imaging systems of FHR Examples of compressed sensing applied to radar Signal model A review of polar reformatting Sparse reconstruction for perfectly known motion / rotation Autofocus using sparse reconstruction A three step approach to autofocus Rough estimation of the range history Alignment of partial images, improvement of motion estimate Retrieval of phase and motion parameters Summary and outlook
26 SIGNAL MODEL FOR ISAR Geometric relations in two dimensions y b u( (T)) LOS unit vector (body coordinates) y r Body coordinate system r (T) b(t) x b Path Radar coordinate system R(T) R 0 (T) (T) x r Translational motion history Rotational motion history Known from radar direction finding A priori inf. from path
27 SIGNAL MODEL Geometric relations in two dimensions Notation Range history for a specific scatterer Slow time if the far field condition is fulfilled Range history of origin LOS vector in body coordinates
28 SIGNAL MODEL Equivalent transformations If the body coordinate system is shifted by a vector rotated by an angle the new coordinates are and then The new range histories are So the transformations Due to rotation of the new origin Constant rotation angle offset describe the same body in shifted and rotated coordinates. The new range histories are equivalent to the old.
29 SIGNAL MODEL Continuous formulation Elementary signal Superposition Noisy measurement Motion compensation: Reflectivity Estimate of range history Wave number Noise
30 OUTLINE Introduction: Challenges for autofocus Introduction to three imaging systems of FHR Examples of compressed sensing applied to radar Signal model A review of polar reformatting Sparse reconstruction for perfectly known motion / rotation Autofocus using sparse reconstruction A three step approach to autofocus Rough estimation of the range history Alignment of partial images, improvement of motion estimate Retrieval of phase and motion parameters Summary and outlook
31 A CLASSICAL IMAGING METHOD: POLAR REFORMATTING Variable substitution to spatial frequency vectors For perfect motion compensation the signal is written as Variable substitution Fourier term Reconstruction of by a simple inverse Fourier-transform


32 A CLASSICAL IMAGING METHOD: POLAR REFORMATTING Illustration for only one scatterer Point spread function = Fourier transform of the indicator function of the k-set



33 A CLASSICAL IMAGING METHOD: POLAR REFORMATTING No noise, perfect motion compensation

34 A CLASSICAL IMAGING METHOD: POLAR REFORMATTING A remark on the reformatted data If the motion compensation is perfect, each of the vectors of samples in shifted subsets are elements of the same subspace This is not true if the motion compensation is imperfect! Deformation of the k- space
 Rotation error")
35 EFFECT OF MOTION ERRORS Distortion of the k-domain data No errors Range error (linear) Rotation error (linear)
36 OUTLINE Introduction: Challenges for autofocus Introduction to three imaging systems of FHR Examples of compressed sensing applied to radar Signal model A review of polar reformatting Sparse reconstruction for perfectly known motion / rotation Autofocus using sparse reconstruction A three step approach to autofocus Rough estimation of the range history Alignment of partial images, improvement of motion estimate Retrieval of phase and motion parameters Summary and outlook
37 SIGNAL MODEL FOR SPARSE RECONSTRUCTION Discretization in time and wavenumber Wavenumbers used for measurement Pulse transmit times Resulting k-set Signal matrix (P x Q) at measurement points Written as large M=P Q - dimensional vector
38 SIGNAL MODEL FOR SPARSE RECONSTRUCTION Discretization in time and wavenumber Analogue for noiseless superposition, noisy measurements, and noise: The subscript 'mc' will always indicate motion compensated data, 'pr' stands for polar re-formatted Re-written signal model
39 SIGNAL MODEL FOR SPARSE RECONSTRUCTION Discretization in the position - image grid N representative points scatterers may be present with N>M. in the scene are chosen, where The signals now are written as The reflectivity is called L-sparse, if maximum L of the coefficients are unequal to zero. Sensing matrix
40 SIGNAL MODEL FOR SPARSE RECONSTRUCTION Properties of the sensing matrix In the context of imaging a moving, rotating object, the sensing matrix is strongly dependent on the motion parameters. Remember: By using the data in the motion compensated form, the signal in the continuous description is Restricted isometry or nullspace properties will be difficult to investigate. In the T-domain, the signal will have a certain Doppler-bandwidth, determined by the angular velocity and the extension of the scene. The image pixel spacing in cross-range should be related to this. In the polar reformatted domain the signal is given by the Fourier terms and the image grid has to be related to the 2dim Nyquist rate, maybe supersampled by a certain degree.
41 SPARSE RECONSTRUCTION l1-minimization Method A: Minimization of the cost function Method B: Minimization of the cost function under constraints Both solutions can be obtained by the SPGL1 algorithm, see Ewout van den Berg and Michael P. Friedlander. SPGL1: A solver for large-scale sparse reconstruction. program code, Jun 2007.
42 SPARSE RECONSTRUCTION WITH PERFECT MOTION COMPENSATION Matched filter Sparse reconstruction Sim07 N = 2401 M = 150 L = 12 sigma_noise = -25 db
43 OUTLINE Introduction: Challenges for autofocus Introduction to three imaging systems of FHR Examples of compressed sensing applied to radar Signal model A review of polar reformatting Sparse reconstruction for perfectly known motion / rotation Autofocus using sparse reconstruction A three step approach to autofocus Rough estimation of the range history Alignment of partial images, improvement of motion estimate Retrieval of phase and motion parameters Summary and outlook

44 SPARSE RECONSTRUCTION WITH IMPERFECT MOTION COMPENSATION Example for matched filter and CS reconstruction Matched filter Sparse reconstruction Sim07 N = 2401 M = 150 L = 12 sigma_noise = -25 db
45 AUTOFOCUS WITH SPARSE RECONSTRUCTION Problem formulation and approaches Problem: Translational and rotational motion, described by a parameter vector are not perfectly known. An a prior estimation is available. Based on the radar data, find an improved estimate possible a high quality imaging! which makes Remark The sensing matrix will be dependent on. For motion compensation, also the data depend on. For matched filtering the result is independent on the transformation. For CS: not! '..' stands for subscripts!
46 AUTOFOCUS WITH SPARSE RECONSTRUCTION Approaches Method A: Minimization of the cost function Method B: Minimization of the cost function under constraints
47 OUTLINE Introduction: Challenges for autofocus Introduction to three imaging systems of FHR Examples of compressed sensing applied to radar Signal model A review of polar reformatting Sparse reconstruction for perfectly known motion / rotation Autofocus using sparse reconstruction A three step approach to autofocus Rough estimation of the range history Alignment of partial images, improvement of motion estimate Retrieval of phase and motion parameters Summary and outlook
48 AUTOFOCUS WITH SPARSE RECONSTRUCTION Problem formulation and approaches Both approaches look mathematically elegant! It has been proven in the cited article that the reconstruction of the correct phases is possible by an iterative method. But: for larger motion errors and large aspect angle change it may fail. only the phases are corrected, a recovery of range and aspect history is not performed -> the images become sharp, but distorted. We propose a third method: Method C: The "three step procedure" 1. Range history estimation 2. Partial image alignment 3. Phase retrieval

49 AUTOFOCUS WITH SPARSE RECONSTRUCTION 1. Average range history estimation The range center of gravity is tracked over the time. A smoothed version is used as first range history estimation. If an angular track is available, a priori information on the rotation can be implemented into the first rotation estimate. Experimental praxis shows that this is by far not sufficient to achieve a sharp image! Range profiles after first motion compensation
50 OUTLINE Introduction: Challenges for autofocus Introduction to three imaging systems of FHR Examples of compressed sensing applied to radar Signal model A review of polar reformatting Sparse reconstruction for perfectly known motion / rotation Autofocus using sparse reconstruction A three step approach to autofocus Rough estimation of the range history Alignment of partial images, improvement of motion estimate Retrieval of phase and motion parameters Summary and outlook
51 AUTOFOCUS WITH SPARSE RECONSTRUCTION 2. Partial image alignment KY k range K k crossrange K KX The first stage motion compensated data are partitioned into segments, where the temporal / angular intervals are small enough to avoid range / crossrange migration larger than a classical resolution cell The segments may overlap For each segment a sparse representation is found by l1 minimization To take into account the different resolutions in range and crossrange, the k-set has to be rotated to its main axes, as well as the image grid.

52 AUTOFOCUS WITH SPARSE RECONSTRUCTION 2. Partial image alignment -> movie of patial images Matched filter Sparse reconstruction Sparse reconstruction is working very well also for short time segments.
53 AUTOFOCUS WITH SPARSE RECONSTRUCTION 2. Partial image alignment -> Images processed for two center times Turning Scaling cross range Shifting This equation holds for all related prominent points in the images. Rotation, shift and cross range scaling can be estimated by MMS fit. So, information about the error of translational and rotational motion between the two points of time can be gained by aligning the two images, if a constant velocity error history and a constant angular velocity error is assumed. Putting together these information for adjacent pairs, an estimate of these histories can be obtained.
54 AUTOFOCUS WITH SPARSE RECONSTRUCTION 2. Partial image alignment -> Putting together the estimated values R R Superposed and interpolated range error estimate T T R T R T Illustration for R Similar for
55 OUTLINE Introduction: Challenges for autofocus Introduction to three imaging systems of FHR Examples of compressed sensing applied to radar Signal model A review of polar reformatting Sparse reconstruction for perfectly known motion / rotation Autofocus using sparse reconstruction A three step approach to autofocus Rough estimation of the range history Alignment of partial images, improvement of motion estimate Retrieval of phase and motion parameters Summary and outlook
56 AUTOFOCUS WITH SPARSE RECONSTRUCTION 3. Phase retrieval -> Principle The approach with sparse reconstruction via l1 minimization is superior to classical methods, if the scene itself is sparse: Sparse reconstruction yields a much better basis to analyze the measured raw data in comparison to the reconstructed data based on the estimated sparse scene. This comparison serves as a bases for the elimination of phase errors. Here, we are not only interested in a phase correction (like for the phase gradient algorithm) but also in the improved reconstruction of range and rotation estimation errors The prediction of data for a subsequent data segment based on the estimated sparse scene is superior to classical methods. see the next but one viewgraph

57 AUTOFOCUS WITH SPARSE RECONSTRUCTION 3. Phase retrieval -> Principle KY Base segment Related model phase fronts Sparse reconstruction True phase fronts of adjacent segment Expanded phase fronts KX
58 AUTOFOCUS WITH SPARSE RECONSTRUCTION 3. Phase retrieval -> Correlation between predicted and measured data CS predictor MF predictor Correlation between data segments The reconstructed image from data segment p is used to predict the data for segment p+1
59 AUTOFOCUS WITH SPARSE RECONSTRUCTION 3. Phase retrieval -> Phase correction after alignment the idea The model The measurement So both, model and measurement are elements of an L-dimensional subspace, the coefficients are equal, only the vectors spanning the subspace are different. Since the deformed signals are not known, the reconstruction is performed with the model for the sensing matrix: We can express the measurements also via the model sensing matrix:
60 AUTOFOCUS WITH SPARSE RECONSTRUCTION 3. Phase retrieval -> Phase correction after alignment the idea Though the true coefficient vector is L-sparse, the estimated vector will normally be not L-sparse, since the model does not fit the reality perfectly. Nevertheless, we can expect that â is not too far away from the true a if the error is small enough (Theorems for this robustness exist). Search the P indices for the coefficients in â with the largest magnitudes. To each of these (hopefully) there corresponds a scatterer with non-zero component in a. For each of these indices, calculate The signal which is 'most similar' to will have the slowest variation in the differential phase. A low pass filter can separate this pair and increases the SNR.
61 AUTOFOCUS WITH SPARSE RECONSTRUCTION 3. Phase retrieval -> Phase correction after alignment the idea The difference phase can be evaluated to independent on scatterer with remaining range error equivalent transformation geometry matrix close to I If these two functions are known, range and orientation error can be computed and compensated (up to an equivalent transformation) Extraction similar to the phase gradient method, but 3D.
62 AUTOFOCUS WITH SPARSE RECONSTRUCTION 3. Phase retrieval -> simulated example The procedure of phase retrieval has to be iterated CS image without motion errors CS image with motion errors CS image after AF

63 AUTOFOCUS WITH SPARSE RECONSTRUCTION 3. Phase retrieval -> Example for spotlight SAR CS image without motion errors Evolution of the l1 norm CS image with motion errors CS image after AF
64 SUMMARY AND OUTLOOK We presented an investigation on autofocus using CS methods Sparse representation for a sparse reflecting body yields an improved prediction of the data without distortion a basis for autofocus by comparing the prediction with the measurements To cover a large angular sector, a three-step method is preferable: Coarse estimation of the range history Alignment of partial images Phase retrieval with improved estimation of range and rotation motion What has to be done... Analysis of the performance over a large simulation basis Comparison to other methods Derivation of theorems (?)


65 Seeing the world with radar eyes
Compressive Sensing Applications and Demonstrations: Synthetic Aperture Radar
 Compressive Sensing Applications and Demonstrations: Synthetic Aperture Radar Shaun I. Kelly The University of Edinburgh 1 Outline 1 SAR Basics 2 Compressed Sensing SAR 3 Other Applications of Sparsity
Compressive Sensing Applications and Demonstrations: Synthetic Aperture Radar Shaun I. Kelly The University of Edinburgh 1 Outline 1 SAR Basics 2 Compressed Sensing SAR 3 Other Applications of Sparsity
Motion Compensation in Bistatic Airborne SAR Based on a Geometrical Approach
 SAR Based on a Geometrical Approach Amaya Medrano Ortiz, Holger Nies, Otmar Loffeld Center for Sensorsystems (ZESS) University of Siegen Paul-Bonatz-Str. 9-11 D-57068 Siegen Germany medrano-ortiz@ipp.zess.uni-siegen.de
SAR Based on a Geometrical Approach Amaya Medrano Ortiz, Holger Nies, Otmar Loffeld Center for Sensorsystems (ZESS) University of Siegen Paul-Bonatz-Str. 9-11 D-57068 Siegen Germany medrano-ortiz@ipp.zess.uni-siegen.de
New aspects of bistatic SAR: processing and experiments
 New aspects of bistatic SAR: processing and experiments Joachim H. G. Ender, I. Walterscheid, Andreas R. Brenner FGAN-FHR, Neuenahrer Str. 20, D-53343 Wachtberg, Germany Tel: +49 228 9435-226, Fax: +49
New aspects of bistatic SAR: processing and experiments Joachim H. G. Ender, I. Walterscheid, Andreas R. Brenner FGAN-FHR, Neuenahrer Str. 20, D-53343 Wachtberg, Germany Tel: +49 228 9435-226, Fax: +49
Ship Detection and Motion Parameter Estimation with TanDEM-X in Large Along-Track Baseline Configuration
 Ship Detection and Motion Parameter Estimation with TanDEM-X in Large Along-Track Baseline Configuration SEASAR 2012 Workshop, 20.06.2012 Stefan V. Baumgartner, Gerhard Krieger Microwaves and Radar Institute,
Ship Detection and Motion Parameter Estimation with TanDEM-X in Large Along-Track Baseline Configuration SEASAR 2012 Workshop, 20.06.2012 Stefan V. Baumgartner, Gerhard Krieger Microwaves and Radar Institute,
Coherence Based Polarimetric SAR Tomography
 I J C T A, 9(3), 2016, pp. 133-141 International Science Press Coherence Based Polarimetric SAR Tomography P. Saranya*, and K. Vani** Abstract: Synthetic Aperture Radar (SAR) three dimensional image provides
I J C T A, 9(3), 2016, pp. 133-141 International Science Press Coherence Based Polarimetric SAR Tomography P. Saranya*, and K. Vani** Abstract: Synthetic Aperture Radar (SAR) three dimensional image provides
The Staggered SAR Concept: Imaging a Wide Continuous Swath with High Resolution
 The Staggered SAR Concept: Imaging a Wide Continuous Swath with High Resolution Michelangelo Villano *, Gerhard Krieger *, Alberto Moreira * * German Aerospace Center (DLR), Microwaves and Radar Institute
The Staggered SAR Concept: Imaging a Wide Continuous Swath with High Resolution Michelangelo Villano *, Gerhard Krieger *, Alberto Moreira * * German Aerospace Center (DLR), Microwaves and Radar Institute
PSI Precision, accuracy and validation aspects
 PSI Precision, accuracy and validation aspects Urs Wegmüller Charles Werner Gamma Remote Sensing AG, Gümligen, Switzerland, wegmuller@gamma-rs.ch Contents Aim is to obtain a deeper understanding of what
PSI Precision, accuracy and validation aspects Urs Wegmüller Charles Werner Gamma Remote Sensing AG, Gümligen, Switzerland, wegmuller@gamma-rs.ch Contents Aim is to obtain a deeper understanding of what
Synthetic Aperture Imaging Using a Randomly Steered Spotlight
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Synthetic Aperture Imaging Using a Randomly Steered Spotlight Liu, D.; Boufounos, P.T. TR013-070 July 013 Abstract In this paper, we develop
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Synthetic Aperture Imaging Using a Randomly Steered Spotlight Liu, D.; Boufounos, P.T. TR013-070 July 013 Abstract In this paper, we develop
Digital Processing of Synthetic Aperture Radar Data
 Digital Processing of Synthetic Aperture Radar Data Algorithms and Implementation Ian G. Cumming Frank H. Wong ARTECH HOUSE BOSTON LONDON artechhouse.com Contents Foreword Preface Acknowledgments xix xxiii
Digital Processing of Synthetic Aperture Radar Data Algorithms and Implementation Ian G. Cumming Frank H. Wong ARTECH HOUSE BOSTON LONDON artechhouse.com Contents Foreword Preface Acknowledgments xix xxiii
INTRODUCTION TO REAL ARRAYS
 Aerospace Radar - Lesson 2a: INTRODUCTION TO REAL ARRAYS Hon.-Prof. Dr.-Ing. Joachim Ender Head of Fraunhoferinstitut für Hochfrequenzphysik and Radartechnik FHR Neuenahrer Str. 20, 53343 Wachtberg joachim.ender@fhr.fraunhofer.de
Aerospace Radar - Lesson 2a: INTRODUCTION TO REAL ARRAYS Hon.-Prof. Dr.-Ing. Joachim Ender Head of Fraunhoferinstitut für Hochfrequenzphysik and Radartechnik FHR Neuenahrer Str. 20, 53343 Wachtberg joachim.ender@fhr.fraunhofer.de
Multistatic SAR Algorithm with Image Combination
 Multistatic SAR Algorithm with Image Combination Tommy Teer and Nathan A. Goodman Department of Electrical and Computer Engineering, The University of Arizona 13 E. Speedway Blvd., Tucson, AZ 8571-14 Phone:
Multistatic SAR Algorithm with Image Combination Tommy Teer and Nathan A. Goodman Department of Electrical and Computer Engineering, The University of Arizona 13 E. Speedway Blvd., Tucson, AZ 8571-14 Phone:
In addition, the image registration and geocoding functionality is also available as a separate GEO package.
 GAMMA Software information: GAMMA Software supports the entire processing from SAR raw data to products such as digital elevation models, displacement maps and landuse maps. The software is grouped into
GAMMA Software information: GAMMA Software supports the entire processing from SAR raw data to products such as digital elevation models, displacement maps and landuse maps. The software is grouped into
Do It Yourself 8. Polarization Coherence Tomography (P.C.T) Training Course
 Training Course") Do It Yourself 8 Polarization Coherence Tomography (P.C.T) Training Course 1 Objectives To provide a self taught introduction to Polarization Coherence Tomography (PCT) processing techniques to enable
Do It Yourself 8 Polarization Coherence Tomography (P.C.T) Training Course 1 Objectives To provide a self taught introduction to Polarization Coherence Tomography (PCT) processing techniques to enable
Synthetic Aperture Radar Modeling using MATLAB and Simulink
 Synthetic Aperture Radar Modeling using MATLAB and Simulink Naivedya Mishra Team Lead Uurmi Systems Pvt. Ltd. Hyderabad Agenda What is Synthetic Aperture Radar? SAR Imaging Process Challenges in Design
Synthetic Aperture Radar Modeling using MATLAB and Simulink Naivedya Mishra Team Lead Uurmi Systems Pvt. Ltd. Hyderabad Agenda What is Synthetic Aperture Radar? SAR Imaging Process Challenges in Design
Action TU1208 Civil Engineering Applications of Ground Penetrating Radar. SPOT-GPR: a freeware tool for target detection and localization in GPR data
 Action TU1208 Civil Engineering Applications of Ground Penetrating Radar Final Conference Warsaw, Poland 25-27 September 2017 SPOT-GPR: a freeware tool for target detection and localization in GPR data
Action TU1208 Civil Engineering Applications of Ground Penetrating Radar Final Conference Warsaw, Poland 25-27 September 2017 SPOT-GPR: a freeware tool for target detection and localization in GPR data
Dual-Platform GMTI: First Results With The TerraSAR-X/TanDEM-X Constellation
 Dual-Platform GMTI: First Results With The TerraSAR-X/TanDEM-X Constellation Stefan V. Baumgartner, Gerhard Krieger Microwaves and Radar Institute, German Aerospace Center (DLR) Muenchner Strasse 20, 82234
Dual-Platform GMTI: First Results With The TerraSAR-X/TanDEM-X Constellation Stefan V. Baumgartner, Gerhard Krieger Microwaves and Radar Institute, German Aerospace Center (DLR) Muenchner Strasse 20, 82234
A SPECTRAL ANALYSIS OF SINGLE ANTENNA INTERFEROMETRY. Craig Stringham
 A SPECTRAL ANALYSIS OF SINGLE ANTENNA INTERFEROMETRY Craig Stringham Microwave Earth Remote Sensing Laboratory Brigham Young University 459 CB, Provo, UT 84602 March 18, 2013 ABSTRACT This paper analyzes
A SPECTRAL ANALYSIS OF SINGLE ANTENNA INTERFEROMETRY Craig Stringham Microwave Earth Remote Sensing Laboratory Brigham Young University 459 CB, Provo, UT 84602 March 18, 2013 ABSTRACT This paper analyzes
ENHANCED RADAR IMAGING VIA SPARSITY REGULARIZED 2D LINEAR PREDICTION
 ENHANCED RADAR IMAGING VIA SPARSITY REGULARIZED 2D LINEAR PREDICTION I.Erer 1, K. Sarikaya 1,2, H.Bozkurt 1 1 Department of Electronics and Telecommunications Engineering Electrics and Electronics Faculty,
ENHANCED RADAR IMAGING VIA SPARSITY REGULARIZED 2D LINEAR PREDICTION I.Erer 1, K. Sarikaya 1,2, H.Bozkurt 1 1 Department of Electronics and Telecommunications Engineering Electrics and Electronics Faculty,
Array Shape Tracking Using Active Sonar Reverberation
 Lincoln Laboratory ASAP-2003 Worshop Array Shape Tracing Using Active Sonar Reverberation Vijay Varadarajan and Jeffrey Kroli Due University Department of Electrical and Computer Engineering Durham, NC
Lincoln Laboratory ASAP-2003 Worshop Array Shape Tracing Using Active Sonar Reverberation Vijay Varadarajan and Jeffrey Kroli Due University Department of Electrical and Computer Engineering Durham, NC
A Correlation Test: What were the interferometric observation conditions?
 A Correlation Test: What were the interferometric observation conditions? Correlation in Practical Systems For Single-Pass Two-Aperture Interferometer Systems System noise and baseline/volumetric decorrelation
A Correlation Test: What were the interferometric observation conditions? Correlation in Practical Systems For Single-Pass Two-Aperture Interferometer Systems System noise and baseline/volumetric decorrelation
Memorandum. Clint Slatton Prof. Brian Evans Term project idea for Multidimensional Signal Processing (EE381k)
") Memorandum From: To: Subject: Date : Clint Slatton Prof. Brian Evans Term project idea for Multidimensional Signal Processing (EE381k) 16-Sep-98 Project title: Minimizing segmentation discontinuities in
Memorandum From: To: Subject: Date : Clint Slatton Prof. Brian Evans Term project idea for Multidimensional Signal Processing (EE381k) 16-Sep-98 Project title: Minimizing segmentation discontinuities in
Mission Status and Data Availability: TanDEM-X
 Mission Status and Data Availability: TanDEM-X Irena Hajnsek, Thomas Busche, Alberto Moreira & TanDEM-X Team Microwaves and Radar Institute, German Aerospace Center irena.hajnsek@dlr.de 26-Jan-2009 Outline
Mission Status and Data Availability: TanDEM-X Irena Hajnsek, Thomas Busche, Alberto Moreira & TanDEM-X Team Microwaves and Radar Institute, German Aerospace Center irena.hajnsek@dlr.de 26-Jan-2009 Outline
ISAR IMAGING OF MULTIPLE TARGETS BASED ON PARTICLE SWARM OPTIMIZATION AND HOUGH TRANSFORM
 J. of Electromagn. Waves and Appl., Vol. 23, 1825 1834, 2009 ISAR IMAGING OF MULTIPLE TARGETS BASED ON PARTICLE SWARM OPTIMIZATION AND HOUGH TRANSFORM G.G.Choi,S.H.Park,andH.T.Kim Department of Electronic
J. of Electromagn. Waves and Appl., Vol. 23, 1825 1834, 2009 ISAR IMAGING OF MULTIPLE TARGETS BASED ON PARTICLE SWARM OPTIMIZATION AND HOUGH TRANSFORM G.G.Choi,S.H.Park,andH.T.Kim Department of Electronic
Plane Wave Imaging Using Phased Array Arno Volker 1
 11th European Conference on Non-Destructive Testing (ECNDT 2014), October 6-10, 2014, Prague, Czech Republic More Info at Open Access Database www.ndt.net/?id=16409 Plane Wave Imaging Using Phased Array
11th European Conference on Non-Destructive Testing (ECNDT 2014), October 6-10, 2014, Prague, Czech Republic More Info at Open Access Database www.ndt.net/?id=16409 Plane Wave Imaging Using Phased Array
Challenges in Detecting & Tracking Moving Objects with Synthetic Aperture Radar (SAR)
") Challenges in Detecting & Tracking Moving Objects with Synthetic Aperture Radar (SAR) Michael Minardi PhD Sensors Directorate Air Force Research Laboratory Outline Focusing Moving Targets Locating Moving
Challenges in Detecting & Tracking Moving Objects with Synthetic Aperture Radar (SAR) Michael Minardi PhD Sensors Directorate Air Force Research Laboratory Outline Focusing Moving Targets Locating Moving
New Results on the Omega-K Algorithm for Processing Synthetic Aperture Radar Data
 New Results on the Omega-K Algorithm for Processing Synthetic Aperture Radar Data Matthew A. Tolman and David G. Long Electrical and Computer Engineering Dept. Brigham Young University, 459 CB, Provo,
New Results on the Omega-K Algorithm for Processing Synthetic Aperture Radar Data Matthew A. Tolman and David G. Long Electrical and Computer Engineering Dept. Brigham Young University, 459 CB, Provo,
Design and Analysis of an Euler Transformation Algorithm Applied to Full-Polarimetric ISAR Imagery
 Design and Analysis of an Euler Transformation Algorithm Applied to Full-Polarimetric ISAR Imagery Christopher S. Baird Advisor: Robert Giles Submillimeter-Wave Technology Laboratory (STL) Presented in
Design and Analysis of an Euler Transformation Algorithm Applied to Full-Polarimetric ISAR Imagery Christopher S. Baird Advisor: Robert Giles Submillimeter-Wave Technology Laboratory (STL) Presented in
Imaging and Deconvolution
 Imaging and Deconvolution Urvashi Rau National Radio Astronomy Observatory, Socorro, NM, USA The van-cittert Zernike theorem Ei E V ij u, v = I l, m e sky j 2 i ul vm dldm 2D Fourier transform : Image
Imaging and Deconvolution Urvashi Rau National Radio Astronomy Observatory, Socorro, NM, USA The van-cittert Zernike theorem Ei E V ij u, v = I l, m e sky j 2 i ul vm dldm 2D Fourier transform : Image
Effects of Image Quality on SAR Target Recognition
 Leslie M. Novak Scientific Systems Company, Inc. 500 West Cummings Park, Suite 3000 Woburn, MA 01801 UNITED STATES OF AMERICA lnovak@ssci.com novakl@charter.net ABSTRACT Target recognition systems using
Leslie M. Novak Scientific Systems Company, Inc. 500 West Cummings Park, Suite 3000 Woburn, MA 01801 UNITED STATES OF AMERICA lnovak@ssci.com novakl@charter.net ABSTRACT Target recognition systems using
GEOG 4110/5100 Advanced Remote Sensing Lecture 4
 GEOG 4110/5100 Advanced Remote Sensing Lecture 4 Geometric Distortion Relevant Reading: Richards, Sections 2.11-2.17 Review What factors influence radiometric distortion? What is striping in an image?
GEOG 4110/5100 Advanced Remote Sensing Lecture 4 Geometric Distortion Relevant Reading: Richards, Sections 2.11-2.17 Review What factors influence radiometric distortion? What is striping in an image?
USING A CLUSTERING TECHNIQUE FOR DETECTION OF MOVING TARGETS IN CLUTTER-CANCELLED QUICKSAR IMAGES
 USING A CLUSTERING TECHNIQUE FOR DETECTION OF MOVING TARGETS IN CLUTTER-CANCELLED QUICKSAR IMAGES Mr. D. P. McGarry, Dr. D. M. Zasada, Dr. P. K. Sanyal, Mr. R. P. Perry The MITRE Corporation, 26 Electronic
USING A CLUSTERING TECHNIQUE FOR DETECTION OF MOVING TARGETS IN CLUTTER-CANCELLED QUICKSAR IMAGES Mr. D. P. McGarry, Dr. D. M. Zasada, Dr. P. K. Sanyal, Mr. R. P. Perry The MITRE Corporation, 26 Electronic
Module 4. K-Space Symmetry. Review. K-Space Review. K-Space Symmetry. Partial or Fractional Echo. Half or Partial Fourier HASTE
 MRES 7005 - Fast Imaging Techniques Module 4 K-Space Symmetry Review K-Space Review K-Space Symmetry Partial or Fractional Echo Half or Partial Fourier HASTE Conditions for successful reconstruction Interpolation
MRES 7005 - Fast Imaging Techniques Module 4 K-Space Symmetry Review K-Space Review K-Space Symmetry Partial or Fractional Echo Half or Partial Fourier HASTE Conditions for successful reconstruction Interpolation
Randomized sampling strategies
 Randomized sampling strategies Felix J. Herrmann SLIM Seismic Laboratory for Imaging and Modeling the University of British Columbia SLIM Drivers & Acquisition costs impediments Full-waveform inversion
Randomized sampling strategies Felix J. Herrmann SLIM Seismic Laboratory for Imaging and Modeling the University of British Columbia SLIM Drivers & Acquisition costs impediments Full-waveform inversion
First TOPSAR image and interferometry results with TerraSAR-X
 First TOPSAR image and interferometry results with TerraSAR-X A. Meta, P. Prats, U. Steinbrecher, R. Scheiber, J. Mittermayer DLR Folie 1 A. Meta - 29.11.2007 Introduction Outline TOPSAR acquisition mode
First TOPSAR image and interferometry results with TerraSAR-X A. Meta, P. Prats, U. Steinbrecher, R. Scheiber, J. Mittermayer DLR Folie 1 A. Meta - 29.11.2007 Introduction Outline TOPSAR acquisition mode
Improving Segmented Interferometric Synthetic Aperture Radar Processing Using Presumming. by: K. Clint Slatton. Final Report.
 Improving Segmented Interferometric Synthetic Aperture Radar Processing Using Presumming by: K. Clint Slatton Final Report Submitted to Professor Brian Evans EE381K Multidimensional Digital Signal Processing
Improving Segmented Interferometric Synthetic Aperture Radar Processing Using Presumming by: K. Clint Slatton Final Report Submitted to Professor Brian Evans EE381K Multidimensional Digital Signal Processing
Scene Modeling from Motion-Free Radar Sensing
 Scene Modeling from Motion-Free Radar Sensing Alex Foessel Robotics Institute Carnegie Mellon University Ph.D. Thesis Proposal May 13, 1999 Motivation - 2 - Presentation I. Research on Radar for Robots
Scene Modeling from Motion-Free Radar Sensing Alex Foessel Robotics Institute Carnegie Mellon University Ph.D. Thesis Proposal May 13, 1999 Motivation - 2 - Presentation I. Research on Radar for Robots
Interferometric Synthetic-Aperture Radar (InSAR) Basics
 Basics") Interferometric Synthetic-Aperture Radar (InSAR) Basics 1 Outline SAR limitations Interferometry SAR interferometry (InSAR) Single-pass InSAR Multipass InSAR InSAR geometry InSAR processing steps Phase
Interferometric Synthetic-Aperture Radar (InSAR) Basics 1 Outline SAR limitations Interferometry SAR interferometry (InSAR) Single-pass InSAR Multipass InSAR InSAR geometry InSAR processing steps Phase
A Challenge Problem for 2D/3D Imaging of Targets from a Volumetric Data Set in an Urban Environment
 A Challenge Problem for 2D/3D Imaging of Targets from a Volumetric Data Set in an Urban Environment Curtis H. Casteel, Jr,*, LeRoy A. Gorham, Michael J. Minardi, Steven M. Scarborough, Kiranmai D. Naidu,
A Challenge Problem for 2D/3D Imaging of Targets from a Volumetric Data Set in an Urban Environment Curtis H. Casteel, Jr,*, LeRoy A. Gorham, Michael J. Minardi, Steven M. Scarborough, Kiranmai D. Naidu,
Geometric Accuracy Evaluation, DEM Generation and Validation for SPOT-5 Level 1B Stereo Scene
 Geometric Accuracy Evaluation, DEM Generation and Validation for SPOT-5 Level 1B Stereo Scene Buyuksalih, G.*, Oruc, M.*, Topan, H.*,.*, Jacobsen, K.** * Karaelmas University Zonguldak, Turkey **University
Geometric Accuracy Evaluation, DEM Generation and Validation for SPOT-5 Level 1B Stereo Scene Buyuksalih, G.*, Oruc, M.*, Topan, H.*,.*, Jacobsen, K.** * Karaelmas University Zonguldak, Turkey **University
Wide Angle, Staring Synthetic Aperture Radar
 88 ABW-12-0578 Wide Angle, Staring Synthetic Aperture Radar Feb 2012 Ed Zelnio Sensors Directorate Air Force Research Laboratory Outline Review SAR Focus on Wide Angle, Staring SAR (90%) Technology Challenges
88 ABW-12-0578 Wide Angle, Staring Synthetic Aperture Radar Feb 2012 Ed Zelnio Sensors Directorate Air Force Research Laboratory Outline Review SAR Focus on Wide Angle, Staring SAR (90%) Technology Challenges
Adaptive Doppler centroid estimation algorithm of airborne SAR
 Adaptive Doppler centroid estimation algorithm of airborne SAR Jian Yang 1,2a), Chang Liu 1, and Yanfei Wang 1 1 Institute of Electronics, Chinese Academy of Sciences 19 North Sihuan Road, Haidian, Beijing
Adaptive Doppler centroid estimation algorithm of airborne SAR Jian Yang 1,2a), Chang Liu 1, and Yanfei Wang 1 1 Institute of Electronics, Chinese Academy of Sciences 19 North Sihuan Road, Haidian, Beijing
A Priori Knowledge-Based STAP for Traffic Monitoring Applications:
 A Priori Knowledge-Based STAP for Traffic Monitoring Applications: First Results André Barros Cardoso da Silva, German Aerospace Center (DLR), andre.silva@dlr.de, Germany Stefan Valentin Baumgartner, German
A Priori Knowledge-Based STAP for Traffic Monitoring Applications: First Results André Barros Cardoso da Silva, German Aerospace Center (DLR), andre.silva@dlr.de, Germany Stefan Valentin Baumgartner, German
PolSARpro v4.03 Forest Applications
 PolSARpro v4.03 Forest Applications Laurent Ferro-Famil Lecture on polarimetric SAR Theory and applications to agriculture & vegetation Thursday 19 April, morning Pol-InSAR Tutorial Forest Application
PolSARpro v4.03 Forest Applications Laurent Ferro-Famil Lecture on polarimetric SAR Theory and applications to agriculture & vegetation Thursday 19 April, morning Pol-InSAR Tutorial Forest Application
SUBDIVISION ALGORITHMS FOR MOTION DESIGN BASED ON HOMOLOGOUS POINTS
 SUBDIVISION ALGORITHMS FOR MOTION DESIGN BASED ON HOMOLOGOUS POINTS M. Hofer and H. Pottmann Institute of Geometry Vienna University of Technology, Vienna, Austria hofer@geometrie.tuwien.ac.at, pottmann@geometrie.tuwien.ac.at
SUBDIVISION ALGORITHMS FOR MOTION DESIGN BASED ON HOMOLOGOUS POINTS M. Hofer and H. Pottmann Institute of Geometry Vienna University of Technology, Vienna, Austria hofer@geometrie.tuwien.ac.at, pottmann@geometrie.tuwien.ac.at
Array geometries, signal type, and sampling conditions for the application of compressed sensing in MIMO radar
 Array geometries, signal type, and sampling conditions for the application of compressed sensing in MIMO radar Juan Lopez a and Zhijun Qiao a a Department of Mathematics, The University of Texas - Pan
Array geometries, signal type, and sampling conditions for the application of compressed sensing in MIMO radar Juan Lopez a and Zhijun Qiao a a Department of Mathematics, The University of Texas - Pan
Using Invariant Theory to Obtain Unknown Size, Shape, Motion, and Three-Dimensional Images from Single Aperture Synthetic Aperture Radar
 Using Invariant Theory to Obtain Unknown Size, Shape, Motion, and Three-Dimensional Images from Single Aperture Synthetic Aperture Radar October 2005 Mark Stuff SN-05-0378 AFRL/WS Approved Security and
Using Invariant Theory to Obtain Unknown Size, Shape, Motion, and Three-Dimensional Images from Single Aperture Synthetic Aperture Radar October 2005 Mark Stuff SN-05-0378 AFRL/WS Approved Security and
GAMMA Interferometric Point Target Analysis Software (IPTA): Users Guide
: Users Guide") GAMMA Interferometric Point Target Analysis Software (IPTA): Users Guide Contents User Handbook Introduction IPTA overview Input data Point list generation SLC point data Differential interferogram point
GAMMA Interferometric Point Target Analysis Software (IPTA): Users Guide Contents User Handbook Introduction IPTA overview Input data Point list generation SLC point data Differential interferogram point
HIGH-PERFORMANCE TOMOGRAPHIC IMAGING AND APPLICATIONS
 HIGH-PERFORMANCE TOMOGRAPHIC IMAGING AND APPLICATIONS Hua Lee and Yuan-Fang Wang Department of Electrical and Computer Engineering University of California, Santa Barbara ABSTRACT Tomographic imaging systems
HIGH-PERFORMANCE TOMOGRAPHIC IMAGING AND APPLICATIONS Hua Lee and Yuan-Fang Wang Department of Electrical and Computer Engineering University of California, Santa Barbara ABSTRACT Tomographic imaging systems
Backprojection for Synthetic Aperture Radar
 Brigham Young University BYU ScholarsArchive All Theses and Dissertations 2013-06-13 Backprojection for Synthetic Aperture Radar Michael Israel Duersch Brigham Young University - Provo Follow this and
Brigham Young University BYU ScholarsArchive All Theses and Dissertations 2013-06-13 Backprojection for Synthetic Aperture Radar Michael Israel Duersch Brigham Young University - Provo Follow this and
Compressed Sensing Algorithm for Real-Time Doppler Ultrasound Image Reconstruction
 Mathematical Modelling and Applications 2017; 2(6): 75-80 http://www.sciencepublishinggroup.com/j/mma doi: 10.11648/j.mma.20170206.14 ISSN: 2575-1786 (Print); ISSN: 2575-1794 (Online) Compressed Sensing
Mathematical Modelling and Applications 2017; 2(6): 75-80 http://www.sciencepublishinggroup.com/j/mma doi: 10.11648/j.mma.20170206.14 ISSN: 2575-1786 (Print); ISSN: 2575-1794 (Online) Compressed Sensing
IMAGING WITH SYNTHETIC APERTURE RADAR
 ENGINEERING SCIENCES ; t rical Bngi.net IMAGING WITH SYNTHETIC APERTURE RADAR Didier Massonnet & Jean-Claude Souyris EPFL Press A Swiss academic publisher distributed by CRC Press Table of Contents Acknowledgements
ENGINEERING SCIENCES ; t rical Bngi.net IMAGING WITH SYNTHETIC APERTURE RADAR Didier Massonnet & Jean-Claude Souyris EPFL Press A Swiss academic publisher distributed by CRC Press Table of Contents Acknowledgements
Using CUDA to Accelerate Radar Image Processing
 Using CUDA to Accelerate Radar Image Processing Aaron Rogan Richard Carande 9/23/2010 Approved for Public Release by the Air Force on 14 Sep 2010, Document Number 88 ABW-10-5006 Company Overview Neva Ridge
Using CUDA to Accelerate Radar Image Processing Aaron Rogan Richard Carande 9/23/2010 Approved for Public Release by the Air Force on 14 Sep 2010, Document Number 88 ABW-10-5006 Company Overview Neva Ridge
Quantifying the Dynamic Ocean Surface Using Underwater Radiometric Measurement
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Quantifying the Dynamic Ocean Surface Using Underwater Radiometric Measurement Lian Shen Department of Mechanical Engineering
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Quantifying the Dynamic Ocean Surface Using Underwater Radiometric Measurement Lian Shen Department of Mechanical Engineering
Lateral Ground Movement Estimation from Space borne Radar by Differential Interferometry.
 Lateral Ground Movement Estimation from Space borne Radar by Differential Interferometry. Abstract S.Sircar 1, 2, C.Randell 1, D.Power 1, J.Youden 1, E.Gill 2 and P.Han 1 Remote Sensing Group C-CORE 1
Lateral Ground Movement Estimation from Space borne Radar by Differential Interferometry. Abstract S.Sircar 1, 2, C.Randell 1, D.Power 1, J.Youden 1, E.Gill 2 and P.Han 1 Remote Sensing Group C-CORE 1
APPLICATIONS FOR COORDINATED MOTION IN RADOME TESTING
 APPLICATIONS FOR COORDINATED MOTION IN RADOME TESTING Scott McBride Evan Langman Marion Baggett MI Technologies, LLC 4500 River Green Parkway, Suite 200 Duluth, GA 30096 ABSTRACT Traditional data collection
APPLICATIONS FOR COORDINATED MOTION IN RADOME TESTING Scott McBride Evan Langman Marion Baggett MI Technologies, LLC 4500 River Green Parkway, Suite 200 Duluth, GA 30096 ABSTRACT Traditional data collection
Heath Yardley University of Adelaide Radar Research Centre
 Heath Yardley University of Adelaide Radar Research Centre Radar Parameters Imaging Geometry Imaging Algorithm Gamma Remote Sensing Modular SAR Processor (MSP) Motion Compensation (MoCom) Calibration Polarimetric
Heath Yardley University of Adelaide Radar Research Centre Radar Parameters Imaging Geometry Imaging Algorithm Gamma Remote Sensing Modular SAR Processor (MSP) Motion Compensation (MoCom) Calibration Polarimetric
Advanced Image Reconstruction Methods for Photoacoustic Tomography
 Advanced Image Reconstruction Methods for Photoacoustic Tomography Mark A. Anastasio, Kun Wang, and Robert Schoonover Department of Biomedical Engineering Washington University in St. Louis 1 Outline Photoacoustic/thermoacoustic
Advanced Image Reconstruction Methods for Photoacoustic Tomography Mark A. Anastasio, Kun Wang, and Robert Schoonover Department of Biomedical Engineering Washington University in St. Louis 1 Outline Photoacoustic/thermoacoustic
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Instruction manual for T3DS calculator software. Analyzer for terahertz spectra and imaging data. Release 2.4
 Instruction manual for T3DS calculator software Release 2.4 T3DS calculator v2.4 16/02/2018 www.batop.de1 Table of contents 0. Preliminary remarks...3 1. Analyzing material properties...4 1.1 Loading data...4
Instruction manual for T3DS calculator software Release 2.4 T3DS calculator v2.4 16/02/2018 www.batop.de1 Table of contents 0. Preliminary remarks...3 1. Analyzing material properties...4 1.1 Loading data...4
CHAPTER 5 GLOBAL AND LOCAL FEATURES FOR FACE RECOGNITION
 122 CHAPTER 5 GLOBAL AND LOCAL FEATURES FOR FACE RECOGNITION 5.1 INTRODUCTION Face recognition, means checking for the presence of a face from a database that contains many faces and could be performed
122 CHAPTER 5 GLOBAL AND LOCAL FEATURES FOR FACE RECOGNITION 5.1 INTRODUCTION Face recognition, means checking for the presence of a face from a database that contains many faces and could be performed
Processing techniques for a GNSS-R scatterometric remote sensing instrument
 Processing techniques for a GNSS-R scatterometric remote sensing instrument Philip J. Jales (1) Martin Unwin (2) Craig Underwood (1) (1) Surrey Space Centre, University Of Surrey, UK (2) Satellite Technology
Processing techniques for a GNSS-R scatterometric remote sensing instrument Philip J. Jales (1) Martin Unwin (2) Craig Underwood (1) (1) Surrey Space Centre, University Of Surrey, UK (2) Satellite Technology
Radar Tomography of Moving Targets
 On behalf of Sensors Directorate, Air Force Research Laboratory Final Report September 005 S. L. Coetzee, C. J. Baker, H. D. Griffiths University College London REPORT DOCUMENTATION PAGE Form Approved
On behalf of Sensors Directorate, Air Force Research Laboratory Final Report September 005 S. L. Coetzee, C. J. Baker, H. D. Griffiths University College London REPORT DOCUMENTATION PAGE Form Approved
Interferometric processing. Rüdiger Gens
 Rüdiger Gens Why InSAR processing? extracting three-dimensional information out of a radar image pair covering the same area digital elevation model change detection 2 Processing chain 3 Processing chain
Rüdiger Gens Why InSAR processing? extracting three-dimensional information out of a radar image pair covering the same area digital elevation model change detection 2 Processing chain 3 Processing chain
Image Acquisition Systems
 Image Acquisition Systems Goals and Terminology Conventional Radiography Axial Tomography Computer Axial Tomography (CAT) Magnetic Resonance Imaging (MRI) PET, SPECT Ultrasound Microscopy Imaging ITCS
Image Acquisition Systems Goals and Terminology Conventional Radiography Axial Tomography Computer Axial Tomography (CAT) Magnetic Resonance Imaging (MRI) PET, SPECT Ultrasound Microscopy Imaging ITCS
Measurements and Bits: Compressed Sensing meets Information Theory. Dror Baron ECE Department Rice University dsp.rice.edu/cs
 Measurements and Bits: Compressed Sensing meets Information Theory Dror Baron ECE Department Rice University dsp.rice.edu/cs Sensing by Sampling Sample data at Nyquist rate Compress data using model (e.g.,
Measurements and Bits: Compressed Sensing meets Information Theory Dror Baron ECE Department Rice University dsp.rice.edu/cs Sensing by Sampling Sample data at Nyquist rate Compress data using model (e.g.,
INTERFEROMETRIC ISAR IMAGING ON MARITIME TARGET APPLICATIONS: SIMULATION OF REALISTIC TARGETS AND DYNAMICS
 Progress In Electromagnetics Research, Vol. 132, 571 586, 212 INTERFEROMETRIC ISAR IMAGING ON MARITIME TARGET APPLICATIONS: SIMULATION OF REALISTIC TARGETS AND DYNAMICS D. Felguera-Martín *, J. T. González-Partida,
Progress In Electromagnetics Research, Vol. 132, 571 586, 212 INTERFEROMETRIC ISAR IMAGING ON MARITIME TARGET APPLICATIONS: SIMULATION OF REALISTIC TARGETS AND DYNAMICS D. Felguera-Martín *, J. T. González-Partida,
AIRBORNE synthetic aperture radar (SAR) systems
 systems") IEEE GEOSCIENCE AND REMOTE SENSING LETTERS, VOL 3, NO 1, JANUARY 2006 145 Refined Estimation of Time-Varying Baseline Errors in Airborne SAR Interferometry Andreas Reigber, Member, IEEE, Pau Prats, Student
IEEE GEOSCIENCE AND REMOTE SENSING LETTERS, VOL 3, NO 1, JANUARY 2006 145 Refined Estimation of Time-Varying Baseline Errors in Airborne SAR Interferometry Andreas Reigber, Member, IEEE, Pau Prats, Student
ADS40 Calibration & Verification Process. Udo Tempelmann*, Ludger Hinsken**, Utz Recke*
 ADS40 Calibration & Verification Process Udo Tempelmann*, Ludger Hinsken**, Utz Recke* *Leica Geosystems GIS & Mapping GmbH, Switzerland **Ludger Hinsken, Author of ORIMA, Konstanz, Germany Keywords: ADS40,
ADS40 Calibration & Verification Process Udo Tempelmann*, Ludger Hinsken**, Utz Recke* *Leica Geosystems GIS & Mapping GmbH, Switzerland **Ludger Hinsken, Author of ORIMA, Konstanz, Germany Keywords: ADS40,
AUTOMATIC TARGET RECOGNITION IN HIGH RESOLUTION SAR IMAGE BASED ON BACKSCATTERING MODEL
 AUTOMATIC TARGET RECOGNITION IN HIGH RESOLUTION SAR IMAGE BASED ON BACKSCATTERING MODEL Wang Chao (1), Zhang Hong (2), Zhang Bo (1), Wen Xiaoyang (1), Wu Fan (1), Zhang Changyao (3) (1) National Key Laboratory
AUTOMATIC TARGET RECOGNITION IN HIGH RESOLUTION SAR IMAGE BASED ON BACKSCATTERING MODEL Wang Chao (1), Zhang Hong (2), Zhang Bo (1), Wen Xiaoyang (1), Wu Fan (1), Zhang Changyao (3) (1) National Key Laboratory
Bistatic SAR coherence improvement through spatially variant polarimetry
 1 Bistatic SAR coherence improvement through spatially variant polarimetry By Daniel Andre Centre for Electronic Warfare, Cranfield University, Defence Academy of the United Kingdom, Shrivenham, UK. Abstract
1 Bistatic SAR coherence improvement through spatially variant polarimetry By Daniel Andre Centre for Electronic Warfare, Cranfield University, Defence Academy of the United Kingdom, Shrivenham, UK. Abstract
Compressed Sensing for Electron Tomography
 University of Maryland, College Park Department of Mathematics February 10, 2015 1/33 Outline I Introduction 1 Introduction 2 3 4 2/33 1 Introduction 2 3 4 3/33 Tomography Introduction Tomography - Producing
University of Maryland, College Park Department of Mathematics February 10, 2015 1/33 Outline I Introduction 1 Introduction 2 3 4 2/33 1 Introduction 2 3 4 3/33 Tomography Introduction Tomography - Producing
ELEC Dr Reji Mathew Electrical Engineering UNSW
 ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Review of Motion Modelling and Estimation Introduction to Motion Modelling & Estimation Forward Motion Backward Motion Block Motion Estimation Motion
ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Review of Motion Modelling and Estimation Introduction to Motion Modelling & Estimation Forward Motion Backward Motion Block Motion Estimation Motion
Coherent Change Detection: Theoretical Description and Experimental Results
 Coherent Change Detection: Theoretical Description and Experimental Results Mark Preiss and Nicholas J. S. Stacy Intelligence, Surveillance and Reconnaissance Division Defence Science and Technology Organisation
Coherent Change Detection: Theoretical Description and Experimental Results Mark Preiss and Nicholas J. S. Stacy Intelligence, Surveillance and Reconnaissance Division Defence Science and Technology Organisation
Christian Doppler Laboratory for Dependable Wireless Connectivity for the Society in Motion Three-Dimensional Beamforming
 Christian Doppler Laboratory for Three-Dimensional Beamforming Fjolla Ademaj 15.11.216 Studying 3D channel models Channel models on system-level tools commonly 2-dimensional (2D) 3GPP Spatial Channel Model
Christian Doppler Laboratory for Three-Dimensional Beamforming Fjolla Ademaj 15.11.216 Studying 3D channel models Channel models on system-level tools commonly 2-dimensional (2D) 3GPP Spatial Channel Model
Repeat-pass SAR Interferometry Experiments with Gaofen-3: A Case Study of Ningbo Area
 Repeat-pass SAR Interferometry Experiments with Gaofen-3: A Case Study of Ningbo Area Tao Zhang, Xiaolei Lv, Bing Han, Bin Lei and Jun Hong Key Laboratory of Technology in Geo-spatial Information Processing
Repeat-pass SAR Interferometry Experiments with Gaofen-3: A Case Study of Ningbo Area Tao Zhang, Xiaolei Lv, Bing Han, Bin Lei and Jun Hong Key Laboratory of Technology in Geo-spatial Information Processing
Effects of Weight Approximation Methods on Performance of Digital Beamforming Using Least Mean Squares Algorithm
 IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331,Volume 6, Issue 3 (May. - Jun. 2013), PP 82-90 Effects of Weight Approximation Methods on Performance
IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331,Volume 6, Issue 3 (May. - Jun. 2013), PP 82-90 Effects of Weight Approximation Methods on Performance
Radar Automatic Target Recognition based on Disjoint Multi-static K-space Coverage
 Radar Automatic Target Recognition based on Disjoint Multi-static K-space Coverage David Blacknell, Darren Muff, Matt Nottingham, Claire Stevenson Dstl, Porton Down, Salisbury, SP4 0JQ United Kingdom dblacknell@dstl.gov.uk
Radar Automatic Target Recognition based on Disjoint Multi-static K-space Coverage David Blacknell, Darren Muff, Matt Nottingham, Claire Stevenson Dstl, Porton Down, Salisbury, SP4 0JQ United Kingdom dblacknell@dstl.gov.uk
MODELLING OF THE SCATTERING BY A SMOOTH DIELECTRIC CYLINDER: STUDY OF THE COMPLEX SCATTERING MATRIX
 MODELLING OF THE SCATTERING BY A SMOOTH DIELECTRIC CYLINDER: STUDY OF THE COMPLEX SCATTERING MATRIX L Thirion 1, C Dahon 2,3, A Lefevre 4, I Chênerie 1, L Ferro-Famil 2, C Titin-Schnaider 3 1 AD2M, Université
MODELLING OF THE SCATTERING BY A SMOOTH DIELECTRIC CYLINDER: STUDY OF THE COMPLEX SCATTERING MATRIX L Thirion 1, C Dahon 2,3, A Lefevre 4, I Chênerie 1, L Ferro-Famil 2, C Titin-Schnaider 3 1 AD2M, Université
Study of the Effects of Target Geometry on Synthetic Aperture Radar Images using Simulation Studies
 Study of the Effects of Target Geometry on Synthetic Aperture Radar Images using Simulation Studies K. Tummala a,*, A. K. Jha a, S. Kumar b a Geoinformatics Dept., Indian Institute of Remote Sensing, Dehradun,
Study of the Effects of Target Geometry on Synthetic Aperture Radar Images using Simulation Studies K. Tummala a,*, A. K. Jha a, S. Kumar b a Geoinformatics Dept., Indian Institute of Remote Sensing, Dehradun,
Ruch (Motion) Rozpoznawanie Obrazów Krzysztof Krawiec Instytut Informatyki, Politechnika Poznańska. Krzysztof Krawiec IDSS
 Rozpoznawanie Obrazów Krzysztof Krawiec Instytut Informatyki, Politechnika Poznańska. Krzysztof Krawiec IDSS") Ruch (Motion) Rozpoznawanie Obrazów Krzysztof Krawiec Instytut Informatyki, Politechnika Poznańska 1 Krzysztof Krawiec IDSS 2 The importance of visual motion Adds entirely new (temporal) dimension to visual
Ruch (Motion) Rozpoznawanie Obrazów Krzysztof Krawiec Instytut Informatyki, Politechnika Poznańska 1 Krzysztof Krawiec IDSS 2 The importance of visual motion Adds entirely new (temporal) dimension to visual
MULTI-TEMPORAL INTERFEROMETRIC POINT TARGET ANALYSIS
 MULTI-TEMPORAL INTERFEROMETRIC POINT TARGET ANALYSIS U. WEGMÜLLER, C. WERNER, T. STROZZI, AND A. WIESMANN Gamma Remote Sensing AG. Thunstrasse 130, CH-3074 Muri (BE), Switzerland wegmuller@gamma-rs.ch,
MULTI-TEMPORAL INTERFEROMETRIC POINT TARGET ANALYSIS U. WEGMÜLLER, C. WERNER, T. STROZZI, AND A. WIESMANN Gamma Remote Sensing AG. Thunstrasse 130, CH-3074 Muri (BE), Switzerland wegmuller@gamma-rs.ch,
Outline Introduction Problem Formulation Proposed Solution Applications Conclusion. Compressed Sensing. David L Donoho Presented by: Nitesh Shroff
 Compressed Sensing David L Donoho Presented by: Nitesh Shroff University of Maryland Outline 1 Introduction Compressed Sensing 2 Problem Formulation Sparse Signal Problem Statement 3 Proposed Solution
Compressed Sensing David L Donoho Presented by: Nitesh Shroff University of Maryland Outline 1 Introduction Compressed Sensing 2 Problem Formulation Sparse Signal Problem Statement 3 Proposed Solution
SEA SURFACE SPEED FROM TERRASAR-X ATI DATA
 SEA SURFACE SPEED FROM TERRASAR-X ATI DATA Matteo Soccorsi (1) and Susanne Lehner (1) (1) German Aerospace Center, Remote Sensing Technology Institute, 82234 Weßling, Germany, Email: matteo.soccorsi@dlr.de
SEA SURFACE SPEED FROM TERRASAR-X ATI DATA Matteo Soccorsi (1) and Susanne Lehner (1) (1) German Aerospace Center, Remote Sensing Technology Institute, 82234 Weßling, Germany, Email: matteo.soccorsi@dlr.de
G012 Scattered Ground-roll Attenuation for 2D Land Data Using Seismic Interferometry
 G012 Scattered Ground-roll Attenuation for 2D Land Data Using Seismic Interferometry D.F. Halliday* (Schlumberger Cambridge Research), P.J. Bilsby (WesternGeco), J. Quigley (WesternGeco) & E. Kragh (Schlumberger
G012 Scattered Ground-roll Attenuation for 2D Land Data Using Seismic Interferometry D.F. Halliday* (Schlumberger Cambridge Research), P.J. Bilsby (WesternGeco), J. Quigley (WesternGeco) & E. Kragh (Schlumberger
IDENTIFICATION OF THE LOCATION PHASE SCREEN OF ERS-ENVISAT PERMANENT SCATTERERS
 IDENTIFICATION OF THE LOCATION PHASE SCREEN OF ERS-ENVISAT PERMANENT SCATTERERS M. Arrigoni (1), C. Colesanti (1), A. Ferretti (2), D. Perissin (1), C. Prati (1), F. Rocca (1) (1) Dipartimento di Elettronica
IDENTIFICATION OF THE LOCATION PHASE SCREEN OF ERS-ENVISAT PERMANENT SCATTERERS M. Arrigoni (1), C. Colesanti (1), A. Ferretti (2), D. Perissin (1), C. Prati (1), F. Rocca (1) (1) Dipartimento di Elettronica
Optimum Array Processing
 Optimum Array Processing Part IV of Detection, Estimation, and Modulation Theory Harry L. Van Trees WILEY- INTERSCIENCE A JOHN WILEY & SONS, INC., PUBLICATION Preface xix 1 Introduction 1 1.1 Array Processing
Optimum Array Processing Part IV of Detection, Estimation, and Modulation Theory Harry L. Van Trees WILEY- INTERSCIENCE A JOHN WILEY & SONS, INC., PUBLICATION Preface xix 1 Introduction 1 1.1 Array Processing
Compressed Sensing for Rapid MR Imaging
 Compressed Sensing for Rapid Imaging Michael Lustig1, Juan Santos1, David Donoho2 and John Pauly1 1 Electrical Engineering Department, Stanford University 2 Statistics Department, Stanford University rapid
Compressed Sensing for Rapid Imaging Michael Lustig1, Juan Santos1, David Donoho2 and John Pauly1 1 Electrical Engineering Department, Stanford University 2 Statistics Department, Stanford University rapid
Course Outline (1) #6 Data Acquisition for Built Environment. Fumio YAMAZAKI
 #6 Data Acquisition for Built Environment. Fumio YAMAZAKI") AT09.98 Applied GIS and Remote Sensing for Disaster Mitigation #6 Data Acquisition for Built Environment 9 October, 2002 Fumio YAMAZAKI yamazaki@ait.ac.th http://www.star.ait.ac.th/~yamazaki/ Course Outline
AT09.98 Applied GIS and Remote Sensing for Disaster Mitigation #6 Data Acquisition for Built Environment 9 October, 2002 Fumio YAMAZAKI yamazaki@ait.ac.th http://www.star.ait.ac.th/~yamazaki/ Course Outline
Motion Estimation for Video Coding Standards
 Motion Estimation for Video Coding Standards Prof. Ja-Ling Wu Department of Computer Science and Information Engineering National Taiwan University Introduction of Motion Estimation The goal of video compression
Motion Estimation for Video Coding Standards Prof. Ja-Ling Wu Department of Computer Science and Information Engineering National Taiwan University Introduction of Motion Estimation The goal of video compression
Three-dimensional digital elevation model of Mt. Vesuvius from NASA/JPL TOPSAR
 Cover Three-dimensional digital elevation model of Mt. Vesuvius from NASA/JPL TOPSAR G.ALBERTI, S. ESPOSITO CO.RI.S.T.A., Piazzale V. Tecchio, 80, I-80125 Napoli, Italy and S. PONTE Department of Aerospace
Cover Three-dimensional digital elevation model of Mt. Vesuvius from NASA/JPL TOPSAR G.ALBERTI, S. ESPOSITO CO.RI.S.T.A., Piazzale V. Tecchio, 80, I-80125 Napoli, Italy and S. PONTE Department of Aerospace
Coherent Auto-Calibration of APE and NsRCM under Fast Back-Projection Image Formation for Airborne SAR Imaging in Highly-Squint Angle
 remote sensing Article Coherent Auto-Calibration of APE and NsRCM under Fast Back-Projection Image Formation for Airborne SAR Imaging in Highly-Squint Angle Lei Yang 1,, Song Zhou 2, *, Lifan Zhao 3 and
remote sensing Article Coherent Auto-Calibration of APE and NsRCM under Fast Back-Projection Image Formation for Airborne SAR Imaging in Highly-Squint Angle Lei Yang 1,, Song Zhou 2, *, Lifan Zhao 3 and
Progress In Electromagnetics Research, Vol. 125, , 2012
 Progress In Electromagnetics Research, Vol. 125, 527 542, 2012 A NOVEL IMAGE FORMATION ALGORITHM FOR HIGH-RESOLUTION WIDE-SWATH SPACEBORNE SAR USING COMPRESSED SENSING ON AZIMUTH DIS- PLACEMENT PHASE CENTER
Progress In Electromagnetics Research, Vol. 125, 527 542, 2012 A NOVEL IMAGE FORMATION ALGORITHM FOR HIGH-RESOLUTION WIDE-SWATH SPACEBORNE SAR USING COMPRESSED SENSING ON AZIMUTH DIS- PLACEMENT PHASE CENTER
Research Article Cross Beam STAP for Nonstationary Clutter Suppression in Airborne Radar
 Antennas and Propagation Volume 213, Article ID 27631, 5 pages http://dx.doi.org/1.1155/213/27631 Research Article Cross Beam STAP for Nonstationary Clutter Suppression in Airborne Radar Yongliang Wang,
Antennas and Propagation Volume 213, Article ID 27631, 5 pages http://dx.doi.org/1.1155/213/27631 Research Article Cross Beam STAP for Nonstationary Clutter Suppression in Airborne Radar Yongliang Wang,
Driven Cavity Example
 BMAppendixI.qxd 11/14/12 6:55 PM Page I-1 I CFD Driven Cavity Example I.1 Problem One of the classic benchmarks in CFD is the driven cavity problem. Consider steady, incompressible, viscous flow in a square
BMAppendixI.qxd 11/14/12 6:55 PM Page I-1 I CFD Driven Cavity Example I.1 Problem One of the classic benchmarks in CFD is the driven cavity problem. Consider steady, incompressible, viscous flow in a square
By Bonemap Extending Isadora s 3D Particles and 3D Model Particles
 Extending Isadora s 3D Particles and 3D Model Particles By Bonemap 2018 Page 1 v.1 Extending Isadora s 3D Particles and 3D Model Particles with media instances By Bonemap 2018 One of the more difficult
Extending Isadora s 3D Particles and 3D Model Particles By Bonemap 2018 Page 1 v.1 Extending Isadora s 3D Particles and 3D Model Particles with media instances By Bonemap 2018 One of the more difficult
SAFT-Reconstruction in ultrasonic immersion technique using phased array transducers
 SAFT-Reconstruction in ultrasonic immersion technique using phased array transducers J. Kitze, J. Prager, R. Boehm, U. Völz, H.-J. Montag Federal Institute for Materials Research and Testing Berlin, Division
SAFT-Reconstruction in ultrasonic immersion technique using phased array transducers J. Kitze, J. Prager, R. Boehm, U. Völz, H.-J. Montag Federal Institute for Materials Research and Testing Berlin, Division
Sparse sampling in MRI: From basic theory to clinical application. R. Marc Lebel, PhD Department of Electrical Engineering Department of Radiology
 Sparse sampling in MRI: From basic theory to clinical application R. Marc Lebel, PhD Department of Electrical Engineering Department of Radiology Objective Provide an intuitive overview of compressed sensing
Sparse sampling in MRI: From basic theory to clinical application R. Marc Lebel, PhD Department of Electrical Engineering Department of Radiology Objective Provide an intuitive overview of compressed sensing
Moving target location and imaging using dual-speed velocity SAR
 Moving target location and imaging using dual-speed velocity SAR G. Li, J. Xu, Y.-N. Peng and X.-G. Xia Abstract: Velocity synthetic aperture radar (VSAR) is an effective tool for slowly moving target
Moving target location and imaging using dual-speed velocity SAR G. Li, J. Xu, Y.-N. Peng and X.-G. Xia Abstract: Velocity synthetic aperture radar (VSAR) is an effective tool for slowly moving target
Missile Simulation in Support of Research, Development, Test Evaluation and Acquisition
 NDIA 2012 Missile Simulation in Support of Research, Development, Test Evaluation and Acquisition 15 May 2012 Briefed by: Stephanie Brown Reitmeier United States Army Aviation and Missile Research, Development,
NDIA 2012 Missile Simulation in Support of Research, Development, Test Evaluation and Acquisition 15 May 2012 Briefed by: Stephanie Brown Reitmeier United States Army Aviation and Missile Research, Development,
Synthetic Aperture Radar Systems for Small Aircrafts: Data Processing Approaches
 20 Synthetic Aperture Radar Systems for Small Aircrafts: Data Processing Approaches Oleksandr O. Bezvesilniy and Dmytro M. Vavriv Institute of Radio Astronomy of the National Academy of Sciences of Ukraine
20 Synthetic Aperture Radar Systems for Small Aircrafts: Data Processing Approaches Oleksandr O. Bezvesilniy and Dmytro M. Vavriv Institute of Radio Astronomy of the National Academy of Sciences of Ukraine