CelestLabX: CelestLab s extension module
|
|
|
- Magdalen Patrick
- 6 years ago
- Views:
Transcription

1 ScilabTEC CelestLabX: CelestLab s extension module Alain Lamy, CNES Alain.Lamy@cnes.fr 16 May 2014
2 Space Flight Dynamics mission design at CNES Agenda What tools for mission design? -> What makes Scilab adapted to mission design? CelestLab: Our toolbox for SFD mission design CelestLabX: Extension to CelestLab Design options and choices Development aspects Contents Conclusion 2


3 The Toulouse Space Centre Prepares the French space technical policy Develops orbital systems Operates satellites Ensures compatibility with the French Operations Space Act Systems Engineering & Flight Dynamics department Mission Design and Flight Dynamics Coordination Support to project system teams (performance analyses ) Delegated responsibility on flight dynamics system, test benches, mission simulator, system tests Architects for AOCS, Command and control flight S/W Flight dynamics: Mission design Coordination (preparation of operations ) 3
4 What is flight dynamics? Flight dynamics is the field related to the orbit / attitude (orientation) of objects in space, which includes aspects such as: Defining the trajectory (around Earth, other planets, the Sun ) Determining the trajectory using measurements (from ground stations, using onboard sensors) Simulating various aspects of the mission: visibility from ground stations Controlling the trajectory, computing adequate maneuvers to keep the satellite on track. Project phases: Mission design: early stages -> prove the feasibility Preparation of the operational activities / tools / flight software for all mission phases Operations 4
5 Introduction: mission design at CNES (mission design for projects in early phases) Iterative process to: Better define a mission Prove its feasibility Exhibit the key elements Mission objectives, Hypotheses Studies Space Electrical architecture Attitude control On-board Instruments dynamics Thermics Coordination (PASO) At CNES mission analyses are carried out within a dedicated structure: PASO (*) = Concurrent Design Facility (*) Plateau d Architecture des Systèmes Orbitaux 5
 Robustness (reference, reliable tools must be available) Efficiency (simple problems/questions must be answered easily) Consistency")
6 What tools for mission design? What kind of tools do we need for mission design? (lots of studies, various tools required, there are always specific aspects...) Not so easy. Compromise between: Flexibility (adaptation of tools must be easy) Robustness (reference, reliable tools must be available) Efficiency (simple problems/questions must be answered easily) Consistency between tools Scilab appears to fullfill our needs Some time ago, we didn t use Scilab: We had unix-based solutions, with compiled program (Fortran ), shell scripts, data exchanges using files, dedicated libraries for I/O It worked but was not as flexible as we might have wished. 6
7 What makes Scilab adapted to mission design? The language is simple enough Close enough to maths Adapted to engineers: you do flight dynamics and not programming (but: writing libraries requires a bit more of «programming stuff») Can be easily used by anyone for simple calculations Scilab comes with many functions / libraries No need for external libraries for usual tasks (maths, statistics ) Graphical features included Atoms for additional features Vectorization (operations on vectors) => often well adapted for simple tasks: x = linspace(0,10,100); y = f(x); plot(x,y); Links with other langages possible We used Scilab with C, FORTRAN, and more recently Java Scilab becomes a «glue» language and a unifying platform 7
8 CelestLab = flight dynamics for Scilab Scilab flight dynamics library, pure scilab code Open source (same licence as Scilab) Available on atoms web site since end of Number of downloads > Contains ~250 functions (~20000 lines of code) Functions dealing with main flight dynamics aspects Coordinates & Frames, Trajectory and maneuvers, Orbit properties, Interplanetary, Geometry & events, Relative motion, Models, Utilities Thoroughly tested Reference data from JPL, SOFA, CNES... Lots of examples, demos (~65), tutorial pages Can be used as starting points when you have to do something close to what already exists. Provides immediate answers to common/recurrent questions => simple problems are generally easily solved. 8
9 Simple example (using CelestLab) Angle between the orbit plane and the Sun direction (beta) inc = 77.6 * %CL_deg2rad; sma = 890.e3 + %CL_eqRad; ecc = 0.001; kep0 = [sma; ecc; inc; 0; 0; 0]; cjd0 = CL_dat_cal2cjd(2020,3,10); cjd = cjd0 + (0 : 1/1440 : 10); kep = CL_ex_secularJ2(cjd0, kep0, cjd); // orbital elements // initial date // computation dates // propagate [pos, vel] = CL_oe_kep2car(kep); // position and velocity [pos_ecf, vel_ecf] = CL_fr_convert("ECI", "ECF", cjd, pos, vel); // change ref. frame sun = CL_eph_sun(cjd); sun_ecf = CL_fr_convert("ECI", "ECF", cjd, sun); // Sun position // change ref. frame beta1 = %pi/2 - CL_vectAngle(CL_cross(pos, vel), sun); beta2 = %pi/2 - CL_vectAngle(CL_cross(pos_ecf, vel_ecf), sun_ecf); scf(); plot(cjd, beta2 * %CL_rad2deg, "b"); plot(cjd, beta1 * %CL_rad2deg, "r"); xtitle("beta angle (deg)", "days"); CL_g_legend(gca(), ["Velocity / Earth", "Inertial velocity"]); CL_g_stdaxes(); 9

10 Simple example (using CelestLab) Run the script and you obtain: 10
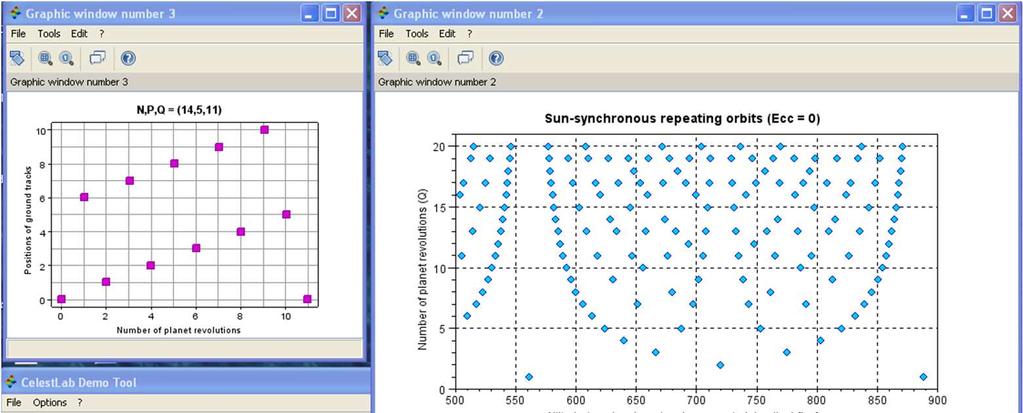



11 CelestLab: illustrations CelestLab Demo Tool 11

12 CelestLab: illustrations Examples of CelestLab help pages 12
13 CelestLab: illustrations Reference frames in CelestLab (use of the latest standards) 13
14 Why make CelestLab open-source? No rights issues in CelestLab Make things standard => A way to share our methods, conventions Make exchanges inside the flight dynamics community easier Instead of data => we can exchange lines of code Description of methods or algorithms => answer can be: «see CelestLab» Can be used in universities for training of engineers / students in the flight dynamics domain Contributions Detections of errors is more efficient if there are many users. Users may have ideas for extensions or create useful tools based on CelestLab (that we would not have time to develop) 14
15 CelestLabX: introduction Open-source code / freeware libraries exist and we would like to use them through Scilab. -> Saves (long) coding / testing time -> Add usefull features to the libraries Sometimes efficiency implies calling native code if vectorization is not easy to achieve. Our solution: CelestLabX = CelestLab s extension: -> contains interfaces to public (or maybe specific) tools and libraries -> the additional features are made available through CelestLab (CelestLab then contains either pure Scilab code or calls to functions from CelestLabX) 15
16 Option 1: CelestLabX: Design options CelestLab (unchanged) CelestLab s extension (independent module) Drawback: Structure not clear. Not obvious from the user s perspective which library contains what. Option 2: Drawback: more complex CelestLab Extended with interfaces to various languages / native code Option 3: Advantage: - CelestLab remains simple. - User (mostly) sees CelestLab - CelestLab alone is useable CelestLab New interfaces CelestLab s extension (low level native code + interfaces) 16
17 CelestLabX: Design options Closer look at the selected option: Standard Scilab API calls C code CelestLab + new interfaces CelestLab s extension (low level native code + interfaces) What the user (mainly) sees (Standard module structure) New features now Included in Scilab for - Calling java from Scilab - Generating jar files Java code 17
18 CelestLabX: Internal structure Example with Stela interface (interface to java code): CelestLabX (STELA jar files) CelestLabX specific Java interfaces: (Java code) CelestLabX (Scilab code) CelestLab (Scilab code) <xxx>.jar Extrapolation.java Derivation.java CLx_stela_extrap() CL_stela_extrap() Included in CelestLabX STELA Interface as simple as possible (reason: simplify code, tests ) Additional features Available / CelestLabX: Change of reference Frame, coordinates... <xxx>.jar CLx_stela_register() CLx_config_set()... STELA installation directory loaded at start-up Generic functions 18
19 Development of CelestLabX Contract with Scilab Enterprises with well defined respective roles: CNES First version (prototype) C only S/E Improved version (standard module) CelestLabX Interfaces Prototypes of implementations Extended version Scilab CelestLab (new interfaces) Final version 19
20 CelestLabX: contents Initial contents STELA: CNES tool created in the context of satellite end of life regulations (limitation of the amount of debris). Used for orbit long-term propagation (prediction of satellite positions over many years, usually up to 100) Semi analytical propagation: propagation of «mean orbital elements» instead of true orbital elements => much less time consuming. Can be downloaded from Two-line elements Data representing orbital states to be used for the propagation of objects with a specific model (SGP4/SDP4) Classically used for the propagation of debris (number of objects > 10000) Open source code exists ( Probably in the future Atmospheric density models; MSIS2000 or DTM
 and data organized in directories (+ Descriptors)")
 User area Scilab «extension»")
21 For mission design at CNES : not only CelestLab! «navigator» Tools (sce, sci ) and data organized in directories (+ Descriptors) dir dir dir.sce.sci.scd tree dir dir data Low level lib. Higher level lib. (+ interfaces with C, Fortran, Java) User area Scilab «extension» Functionalities for an easier use of the tools 21


22 Stela interface in CelestLab (beta version) (Extract from CelestLab help pages) Run 22
23 A few concluding remarks Scilab has been used extensively at CNES for flight dynamics mission design for a few years now. Scilab appears to be well adapted: recurrent studies are now done much more efficiently (thanks to various tools, CelestLab in particular). CelestlabX has been created to extend CelestLab with new features written in other languages (C, Java), while keeping CelestLab simple. The alpha version of CelestLabX is beginning to be used at CNES. CelestLabX is not yet publicly available: it should (hopefully) be before next summer. Interfaces between Scilab and Java will probably be more common practice in the future at CNES as the software for the next generation of control centers will be written in Java. 23


24 For more information... For more information on CelestLab: 24
Jean-François Goester
 Jean-François Goester Email: jean-francois.goester@cnes.fr Summary The old Software suit The choice of the Java TM language PATRIUS GENIUS GENOPUS PSIMU Other applications Distribution Conclusion 2 The
Jean-François Goester Email: jean-francois.goester@cnes.fr Summary The old Software suit The choice of the Java TM language PATRIUS GENIUS GENOPUS PSIMU Other applications Distribution Conclusion 2 The
Figure 1: Fortran S/W suit
 FREE JAVA TM CNES FLIGHT DYNAMICS TOOLS Jean-François Goester (1) (1) CNES, 18, Av. Edouard Belin, 31401 Toulouse Cedex 9, France, Email: jean-francois.goester@cnes.fr ABSTRACT For numerous years, CNES
FREE JAVA TM CNES FLIGHT DYNAMICS TOOLS Jean-François Goester (1) (1) CNES, 18, Av. Edouard Belin, 31401 Toulouse Cedex 9, France, Email: jean-francois.goester@cnes.fr ABSTRACT For numerous years, CNES
20 Years of Commercial Functional Programming
 20 Years of Commercial Functional Programming Ulf Wiger Senior Software Architect Ericsson AB 2004-07-01 1 History of Erlang How to design SW for future telecoms systems? 1995: Several new projects 1998:
20 Years of Commercial Functional Programming Ulf Wiger Senior Software Architect Ericsson AB 2004-07-01 1 History of Erlang How to design SW for future telecoms systems? 1995: Several new projects 1998:
Development of a Ground Based Cooperating Spacecraft Testbed for Research and Education
 DIPARTIMENTO DI INGEGNERIA INDUSTRIALE Development of a Ground Based Cooperating Spacecraft Testbed for Research and Education Mattia Mazzucato, Sergio Tronco, Andrea Valmorbida, Fabio Scibona and Enrico
DIPARTIMENTO DI INGEGNERIA INDUSTRIALE Development of a Ground Based Cooperating Spacecraft Testbed for Research and Education Mattia Mazzucato, Sergio Tronco, Andrea Valmorbida, Fabio Scibona and Enrico
Satellite Attitude Determination
 Satellite Attitude Determination AERO4701 Space Engineering 3 Week 5 Last Week Looked at GPS signals and pseudorange error terms Looked at GPS positioning from pseudorange data Looked at GPS error sources,
Satellite Attitude Determination AERO4701 Space Engineering 3 Week 5 Last Week Looked at GPS signals and pseudorange error terms Looked at GPS positioning from pseudorange data Looked at GPS error sources,
Innovative Test-beds for Validation of Motion Recognition Systems Intended for Orbital Capture Manoeuvres
 Innovative Test-beds for Validation of Motion Recognition Systems Intended for Orbital Capture Manoeuvres Tomasz Rybus 1, Karol Seweryn 1, Janusz Grzybowski 1, Janusz Nicolau-Kukliński 1, Rafał Przybyła
Innovative Test-beds for Validation of Motion Recognition Systems Intended for Orbital Capture Manoeuvres Tomasz Rybus 1, Karol Seweryn 1, Janusz Grzybowski 1, Janusz Nicolau-Kukliński 1, Rafał Przybyła
A multidiscipline solution to support space systems engineering
 Overview 06 February 2014 A multidiscipline solution to support space systems engineering Offering a wide scope of applications and ensuring the sharing of data and models along the design Overview System
Overview 06 February 2014 A multidiscipline solution to support space systems engineering Offering a wide scope of applications and ensuring the sharing of data and models along the design Overview System
OCSD-A / AeroCube-7A Status Update
 OCSD-A / AeroCube-7A Status Update Darren Rowen Richard Dolphus Patrick Doyle Addison Faler April 20, 2016 2016 The Aerospace Corporation Agenda Concept of Operations Overview Spacecraft Configuration
OCSD-A / AeroCube-7A Status Update Darren Rowen Richard Dolphus Patrick Doyle Addison Faler April 20, 2016 2016 The Aerospace Corporation Agenda Concept of Operations Overview Spacecraft Configuration
Responsive Flight Software Development & Verification Techniques for Small Satellites
 Responsive Flight Software Development & Verification Techniques for Small Satellites Darren Rowen The Aerospace Corporation Vehicle Systems Division 9 November 2012 The Aerospace Corporation 2012 Overview
Responsive Flight Software Development & Verification Techniques for Small Satellites Darren Rowen The Aerospace Corporation Vehicle Systems Division 9 November 2012 The Aerospace Corporation 2012 Overview
Blue Canyon Technologies XB1 Enabling a New Realm of CubeSat Science. George Stafford BCT Range St, Suite 200 Boulder, CO 80301
 Blue Canyon Technologies XB1 Enabling a New Realm of CubeSat Science George Stafford BCT 720.458.0703 1600 Range St, Suite 200 Boulder, CO 80301 About BCT Blue Canyon Technologies is a small business founded
Blue Canyon Technologies XB1 Enabling a New Realm of CubeSat Science George Stafford BCT 720.458.0703 1600 Range St, Suite 200 Boulder, CO 80301 About BCT Blue Canyon Technologies is a small business founded
navigation Isaac Skog
 Foot-mounted zerovelocity aided inertial navigation Isaac Skog skog@kth.se Course Outline 1. Foot-mounted inertial navigation a. Basic idea b. Pros and cons 2. Inertial navigation a. The inertial sensors
Foot-mounted zerovelocity aided inertial navigation Isaac Skog skog@kth.se Course Outline 1. Foot-mounted inertial navigation a. Basic idea b. Pros and cons 2. Inertial navigation a. The inertial sensors
Simulation and Analysis of an Earth Observation Mission Based on Agile Platform
 Simulation and Analysis of an Earth Observation Mission Based on Agile Platform Augusto Caramagno Fabrizio Pirondini Dr. Luis F. Peñín Advanced Projects Division DEIMOS Space S.L. -1 - Engineering activities
Simulation and Analysis of an Earth Observation Mission Based on Agile Platform Augusto Caramagno Fabrizio Pirondini Dr. Luis F. Peñín Advanced Projects Division DEIMOS Space S.L. -1 - Engineering activities
Error Simulation and Multi-Sensor Data Fusion
 Error Simulation and Multi-Sensor Data Fusion AERO4701 Space Engineering 3 Week 6 Last Week Looked at the problem of attitude determination for satellites Examined several common methods such as inertial
Error Simulation and Multi-Sensor Data Fusion AERO4701 Space Engineering 3 Week 6 Last Week Looked at the problem of attitude determination for satellites Examined several common methods such as inertial
COMPUTATION OF CROSS SECTION OF COMPLEX BODIES IN ESA DRAMA TOOL
 COMPUTATION OF CROSS SECTION OF COMPLEX BODIES IN ESA DRAMA TOOL Noelia Sanchez-Ortiz (1), Raúl Dominguez-Gonzalez 1, Joaquim Correira de Oliveira (1), Johannes Gelhaus (2), Christopher Kebschull (2) Holger
COMPUTATION OF CROSS SECTION OF COMPLEX BODIES IN ESA DRAMA TOOL Noelia Sanchez-Ortiz (1), Raúl Dominguez-Gonzalez 1, Joaquim Correira de Oliveira (1), Johannes Gelhaus (2), Christopher Kebschull (2) Holger
A Constrained Attitude Control Module for Small Satellites
 A Constrained Attitude Control Module for Small Satellites Henri Kjellberg and E. Glenn Lightsey The University of Texas at Austin Small Satellite Conference Logan, Utah August 14, 2012 Motivation for
A Constrained Attitude Control Module for Small Satellites Henri Kjellberg and E. Glenn Lightsey The University of Texas at Austin Small Satellite Conference Logan, Utah August 14, 2012 Motivation for
New Tools for Spacecraft Simulator Development
 New Tools for Spacecraft Simulator Development March. 2007 Page 1 Why use Simulators? Replace the Spacecraft Support to design Support to testing replacement of real equipment in destructive or expensive
New Tools for Spacecraft Simulator Development March. 2007 Page 1 Why use Simulators? Replace the Spacecraft Support to design Support to testing replacement of real equipment in destructive or expensive
Debian for Scientific Facilities Days Sylvestre Ledru / June 25, 2012
 Debian for Scientific Facilities Days Sylvestre Ledru / June 25, 2012 Professional Services & Support for Scilab, Free Open Source Software for Numerical Computation Sylvestre Ledru Operation manager at
Debian for Scientific Facilities Days Sylvestre Ledru / June 25, 2012 Professional Services & Support for Scilab, Free Open Source Software for Numerical Computation Sylvestre Ledru Operation manager at
DYNAMICS OF SPACE ROBOTIC ARM DURING INTERACTIONS WITH NON COOPERATIVE OBJECTS
 DYNAMICS OF SPACE ROBOTIC ARM DURING INTERACTIONS WITH NON COOPERATIVE OBJECTS Karol Seweryn 1, Marek Banaszkiewicz 1, Bernd Maediger 2, Tomasz Rybus 1, Josef Sommer 2 1 Space Research Centre of the Polish
DYNAMICS OF SPACE ROBOTIC ARM DURING INTERACTIONS WITH NON COOPERATIVE OBJECTS Karol Seweryn 1, Marek Banaszkiewicz 1, Bernd Maediger 2, Tomasz Rybus 1, Josef Sommer 2 1 Space Research Centre of the Polish
ESABASE2/Debris Impact Analysis Tool
 ESABASE2/Debris Impact Analysis Tool ESA/ESTEC Contract 16852/02/NL/JA Final Presentation 15 March 2006 GmbH Richard-Wagner-Str. 1 D-38106 Braunschweig Tel: +49-531-3802-400 Fax: +49-531-3804-401 info@etamax.de
ESABASE2/Debris Impact Analysis Tool ESA/ESTEC Contract 16852/02/NL/JA Final Presentation 15 March 2006 GmbH Richard-Wagner-Str. 1 D-38106 Braunschweig Tel: +49-531-3802-400 Fax: +49-531-3804-401 info@etamax.de
The ESA Earth Observation Mission Software
 The ESA Earth Observation Mission Software M. Zundo; M. De Bartolomei; B. Duesmann; M. Piñol Sole European Space Agency, ESTEC, The Netherlands System Support Division, Earth Observation Directorate What
The ESA Earth Observation Mission Software M. Zundo; M. De Bartolomei; B. Duesmann; M. Piñol Sole European Space Agency, ESTEC, The Netherlands System Support Division, Earth Observation Directorate What
The Interaction of the ISO-SWS Pipeline Software and the ISO-SWS Interactive Analysis System
 Astronomical Data Analysis Software and Systems VII ASP Conference Series, Vol. 145, 1998 R. Albrecht, R. N. Hook and H. A. Bushouse, eds. The Interaction of the ISO-SWS Pipeline Software and the ISO-SWS
Astronomical Data Analysis Software and Systems VII ASP Conference Series, Vol. 145, 1998 R. Albrecht, R. N. Hook and H. A. Bushouse, eds. The Interaction of the ISO-SWS Pipeline Software and the ISO-SWS
Tightly-Integrated Visual and Inertial Navigation for Pinpoint Landing on Rugged Terrains
 Tightly-Integrated Visual and Inertial Navigation for Pinpoint Landing on Rugged Terrains PhD student: Jeff DELAUNE ONERA Director: Guy LE BESNERAIS ONERA Advisors: Jean-Loup FARGES Clément BOURDARIAS
Tightly-Integrated Visual and Inertial Navigation for Pinpoint Landing on Rugged Terrains PhD student: Jeff DELAUNE ONERA Director: Guy LE BESNERAIS ONERA Advisors: Jean-Loup FARGES Clément BOURDARIAS
XVIII. Software Architectures
 XVIII. Software Architectures Software Architectures Subsystems, Modules and Connectors Pipes and Filters, Object-Oriented, Layered, Event-Driven, Repository-Based Architectures Client Server Architectures
XVIII. Software Architectures Software Architectures Subsystems, Modules and Connectors Pipes and Filters, Object-Oriented, Layered, Event-Driven, Repository-Based Architectures Client Server Architectures
Rendezvous sensors and navigation
 Clean Space Industrial Days Rendezvous sensors and navigation 23-27 th May 2016 Nicolas Deslaef (TAS-F) Julien Christy (TAS-F) 83230918-DOC-TAS-FR-001 OPEN Agenda 2 Collection of R&T studies enabling vision
Clean Space Industrial Days Rendezvous sensors and navigation 23-27 th May 2016 Nicolas Deslaef (TAS-F) Julien Christy (TAS-F) 83230918-DOC-TAS-FR-001 OPEN Agenda 2 Collection of R&T studies enabling vision
Appendix Q. Modelling of complex satellite manoeuvres with ESATAN-TMS. Nicolas Bures (ITP Engines UK Ltd, United Kingdom)
") 227 Appendix Q Modelling of complex satellite manoeuvres with ESATAN-TMS Nicolas Bures (ITP Engines UK Ltd, United Kingdom) 228 Modelling of complex satellite manoeuvres with ESATAN-TMS Abstract Requirements
227 Appendix Q Modelling of complex satellite manoeuvres with ESATAN-TMS Nicolas Bures (ITP Engines UK Ltd, United Kingdom) 228 Modelling of complex satellite manoeuvres with ESATAN-TMS Abstract Requirements
SOFTWARE PRODUCT QUALITY SOFTWARE ENGINEERING SOFTWARE QUALITY SOFTWARE QUALITIES - PRODUCT AND PROCESS SOFTWARE QUALITY - QUALITY COMPONENTS
 SOFTWARE PRODUCT QUALITY Today: - Software quality - Quality Components - Good software properties SOFTWARE ENGINEERING SOFTWARE QUALITY Today we talk about quality - but what is quality? Suitable Fulfills
SOFTWARE PRODUCT QUALITY Today: - Software quality - Quality Components - Good software properties SOFTWARE ENGINEERING SOFTWARE QUALITY Today we talk about quality - but what is quality? Suitable Fulfills
BSIF. A Freeware Framework for. Integrated Business Solutions Modeling. Using. Sparx Systems. Enterprise Architect
 33 Chester Rd Tawa 5028 Wellington New Zealand P: (+64) 4 232-2092 m: (+64) 21 322 091 e: info@parkconsulting.co.nz BSIF A Freeware Framework for Integrated Business Solutions Modeling Using Sparx Systems
33 Chester Rd Tawa 5028 Wellington New Zealand P: (+64) 4 232-2092 m: (+64) 21 322 091 e: info@parkconsulting.co.nz BSIF A Freeware Framework for Integrated Business Solutions Modeling Using Sparx Systems
Procedural Displays. Support for More Efficient Mission Preparation & Operations. Frank Plaßmeier //
 Support for More Efficient Mission Preparation & Operations // 2008-10-01 Contents Introduction & Motivation Concept & General Ideas Prototype Conclusion & Outlook p2 Introduction & Motivation (1) Procedures
Support for More Efficient Mission Preparation & Operations // 2008-10-01 Contents Introduction & Motivation Concept & General Ideas Prototype Conclusion & Outlook p2 Introduction & Motivation (1) Procedures
Physical Simulation Experiment System of Multi-Rigid-Body Spacecraft Attitude Control Based on Micro-Gravity Floating Platform Environment
 Joint International Mechanical, Electronic and Information Technology Conference (JIMET 215) Physical Simulation Experiment System of Multi-Rigid-Body Spacecraft Attitude Control Based on Micro-Gravity
Joint International Mechanical, Electronic and Information Technology Conference (JIMET 215) Physical Simulation Experiment System of Multi-Rigid-Body Spacecraft Attitude Control Based on Micro-Gravity
The Partner External Module Program
 The Partner External Module Program June 16 th, 2010 ScilabTec - Workshop 3 Contribute to Scilab 2 The Partner External Modules Program (PEM) Outline Goals of the program Examples of available PEMS How
The Partner External Module Program June 16 th, 2010 ScilabTec - Workshop 3 Contribute to Scilab 2 The Partner External Modules Program (PEM) Outline Goals of the program Examples of available PEMS How
XVIII. Software Architectures
 XVIII. Software Architectures Software Architectures UML Packages Client-Server vs Peer-to-Peer 3-Tier and 4-Tier Architectures Horizontal Layers and Vertical Partitions The Model-View-Controller Architecture
XVIII. Software Architectures Software Architectures UML Packages Client-Server vs Peer-to-Peer 3-Tier and 4-Tier Architectures Horizontal Layers and Vertical Partitions The Model-View-Controller Architecture
Data Retrieval Issues
 ESA Space Weather Programme Study Final Presentation R1. Overview R2. Detailed Rationale R3. Benefits R4. Market Analysis R5. System Requirements R6. Space Segment Definition R7. Ground Segment R8. Prototype
ESA Space Weather Programme Study Final Presentation R1. Overview R2. Detailed Rationale R3. Benefits R4. Market Analysis R5. System Requirements R6. Space Segment Definition R7. Ground Segment R8. Prototype
UAV Autonomous Navigation in a GPS-limited Urban Environment
 UAV Autonomous Navigation in a GPS-limited Urban Environment Yoko Watanabe DCSD/CDIN JSO-Aerial Robotics 2014/10/02-03 Introduction 2 Global objective Development of a UAV onboard system to maintain flight
UAV Autonomous Navigation in a GPS-limited Urban Environment Yoko Watanabe DCSD/CDIN JSO-Aerial Robotics 2014/10/02-03 Introduction 2 Global objective Development of a UAV onboard system to maintain flight
The Avionics System Test Bench, Functional Engineering Simulator: New Developments in Support of Mission and System Verification
 The Avionics System Test Bench, Functional Engineering Simulator: New Developments in Support of Mission and System Verification INTRODUCTION 11th Int. WS on Simulation & EGSE facilities for Space Programmes
The Avionics System Test Bench, Functional Engineering Simulator: New Developments in Support of Mission and System Verification INTRODUCTION 11th Int. WS on Simulation & EGSE facilities for Space Programmes
Control of a quadrotor manipulating a beam (2 projects available)
") Control of a quadrotor manipulating a beam (2 projects available) Supervisor: Emanuele Garone (egarone@ulb.ac.be), Tam Nguyen, Laurent Catoire General Goal: The goal of this project is to complete from
Control of a quadrotor manipulating a beam (2 projects available) Supervisor: Emanuele Garone (egarone@ulb.ac.be), Tam Nguyen, Laurent Catoire General Goal: The goal of this project is to complete from
UCSD AUVSI Unmanned Aerial System Team. Joshua Egbert Shane Grant
 UCSD AUVSI Unmanned Aerial System Team Joshua Egbert Shane Grant Agenda Project background and history System design overview Gimbal Stabilization Target Recognition Lessons Learned Future Work Q&A UCSD
UCSD AUVSI Unmanned Aerial System Team Joshua Egbert Shane Grant Agenda Project background and history System design overview Gimbal Stabilization Target Recognition Lessons Learned Future Work Q&A UCSD
Rakesh Kumar Mishra, Bharat Lohani Geoinformatics division. Kanpur, INDIA. Indian Institute of Technology Kanpur 1
 An Object-Oriented Oriented Software Development Approach to Design Simulator for Airborne Altimetric LiDAR, Bharat Lohani Geoinformatics division Indian Institute t of Technology Kanpur Kanpur, INDIA
An Object-Oriented Oriented Software Development Approach to Design Simulator for Airborne Altimetric LiDAR, Bharat Lohani Geoinformatics division Indian Institute t of Technology Kanpur Kanpur, INDIA
STK Astrogator Tutorial Using the Object Model
 STK Astrogator Tutorial Using the Object Model Analytical Gr aphics, Inc. www. ag i.com info@agi.com 610.981.8000 800. 220.4785 STK Astrogator Tutorial Using the Object Model This tutorial will show you
STK Astrogator Tutorial Using the Object Model Analytical Gr aphics, Inc. www. ag i.com info@agi.com 610.981.8000 800. 220.4785 STK Astrogator Tutorial Using the Object Model This tutorial will show you
AETHERIC ENGINEERING AETHERIC ENGINEERING. Global Telecommunications Consultancy
 AETHERIC ENGINEERING Formed in 1989, is an independent telecommunications consultancy, specialising in satellite communications and satellite technology. We are renowned for our flexibility and tailoring
AETHERIC ENGINEERING Formed in 1989, is an independent telecommunications consultancy, specialising in satellite communications and satellite technology. We are renowned for our flexibility and tailoring
Astrium Space Transportation. ScilabTEC 2012 F. PAULIAC // 28/06/12
 Development of a Scilab tool for the mechanical pre-sizing of launcher structures A first step towards a multi-tool platform for the preliminary design of space launchers Astrium Space Transportation ScilabTEC
Development of a Scilab tool for the mechanical pre-sizing of launcher structures A first step towards a multi-tool platform for the preliminary design of space launchers Astrium Space Transportation ScilabTEC
EARTH OBSERVATION MISSION CFI SOFTWARE
 Page: 1 EARTH OBSERVATION MISSION CFI SOFTWARE 1 INTRODUCTION Release Notes Version 4.11 This document describes the changes introduced in this release of the Earth Observation Mission CFI Software. 2
Page: 1 EARTH OBSERVATION MISSION CFI SOFTWARE 1 INTRODUCTION Release Notes Version 4.11 This document describes the changes introduced in this release of the Earth Observation Mission CFI Software. 2
techniques and illustrated in
 FLYAROUND A flyaround is a PROX OPS task which involves maneuvering the Orbiter (active vehicle) from one point to another point relative to the TGT (passive vehicle) in the TGT LVLH frame. The term "transition"
FLYAROUND A flyaround is a PROX OPS task which involves maneuvering the Orbiter (active vehicle) from one point to another point relative to the TGT (passive vehicle) in the TGT LVLH frame. The term "transition"
Cupid Documentation. Release 0.2 (ESMF v7) Rocky Dunlap
 Rocky Dunlap") Cupid Documentation Release 0.2 (ESMF v7) Rocky Dunlap July 28, 2016 Contents 1 Overview 3 1.1 What is NUOPC?............................................ 3 1.2 What is Eclipse?.............................................
Cupid Documentation Release 0.2 (ESMF v7) Rocky Dunlap July 28, 2016 Contents 1 Overview 3 1.1 What is NUOPC?............................................ 3 1.2 What is Eclipse?.............................................
VTS: a long-term approach for synchronization of all visualization software
 VTS: a long-term approach for synchronization of all visualization software Thomas Crosnier (1), Mathieu Joubert (2), Quentin Minster (2) CNES, Centre spatial de Toulouse, CNES (1) 18 avenue Edouard Belin,
VTS: a long-term approach for synchronization of all visualization software Thomas Crosnier (1), Mathieu Joubert (2), Quentin Minster (2) CNES, Centre spatial de Toulouse, CNES (1) 18 avenue Edouard Belin,
Guidance, Navigation and Control issues for Hayabusa follow-on missions F. Terui, N. Ogawa, O. Mori JAXA (Japan Aerospace Exploration Agency )
") 18-20th May 2009 Guidance, Navigation and Control issues for Hayabusa follow-on missions F. Terui, N. Ogawa, O. Mori JAXA (Japan Aerospace Exploration Agency ) Lessons and Learned & heritage from Proximity
18-20th May 2009 Guidance, Navigation and Control issues for Hayabusa follow-on missions F. Terui, N. Ogawa, O. Mori JAXA (Japan Aerospace Exploration Agency ) Lessons and Learned & heritage from Proximity
CubeSat Flight Control Software
 CubeSat Flight Control Software Senior Project - 2013 Dan Turner Colin Myers Project Description Flight Control Software for Vermont Techs CubeSat Scheduled to launch in September of 2013 Purpose: Test
CubeSat Flight Control Software Senior Project - 2013 Dan Turner Colin Myers Project Description Flight Control Software for Vermont Techs CubeSat Scheduled to launch in September of 2013 Purpose: Test
Simple attitude visualization tool for satellite operations
 Simple attitude visualization tool for satellite operations Franck M. Chatel * and Herbert Wuesten DLR - GSOC, Wessling, 82234, Germany Gabriel Mihail LSE, Darmstadt, 64293, Germany The attitude data delivered
Simple attitude visualization tool for satellite operations Franck M. Chatel * and Herbert Wuesten DLR - GSOC, Wessling, 82234, Germany Gabriel Mihail LSE, Darmstadt, 64293, Germany The attitude data delivered
PREPARATIONS FOR THE ON-ORBIT GEOMETRIC CALIBRATION OF THE ORBVIEW 3 AND 4 SATELLITES
 PREPARATIONS FOR THE ON-ORBIT GEOMETRIC CALIBRATION OF THE ORBVIEW 3 AND 4 SATELLITES David Mulawa, Ph.D. ORBIMAGE mulawa.david@orbimage.com KEY WORDS: Geometric, Camera, Calibration, and Satellite ABSTRACT
PREPARATIONS FOR THE ON-ORBIT GEOMETRIC CALIBRATION OF THE ORBVIEW 3 AND 4 SATELLITES David Mulawa, Ph.D. ORBIMAGE mulawa.david@orbimage.com KEY WORDS: Geometric, Camera, Calibration, and Satellite ABSTRACT
Concept and Performance Simulation with ASTOS
 Concept and Performance Simulation with ASTOS Andreas Wiegand (1), Sven Weikert (1) Astos Solutions GmbH (1) Meitnerstraße 8, 70563 Stuttgart, Germany andreas.wiegand@astos.de ABSTRACT Advanced space missions,
Concept and Performance Simulation with ASTOS Andreas Wiegand (1), Sven Weikert (1) Astos Solutions GmbH (1) Meitnerstraße 8, 70563 Stuttgart, Germany andreas.wiegand@astos.de ABSTRACT Advanced space missions,
Simulation and Optimization
 A Major Step to Efficient Trajectory Simulation and Optimization Astrodynamics Workshop 200 Dipl.-Ing. Sven Weike ASTOS GmbH i.g Content 1. What is ASTOS? 2. History of ASTOS 3. What is new in ASTOS V6
A Major Step to Efficient Trajectory Simulation and Optimization Astrodynamics Workshop 200 Dipl.-Ing. Sven Weike ASTOS GmbH i.g Content 1. What is ASTOS? 2. History of ASTOS 3. What is new in ASTOS V6
Presentation of the Open Frontier Framework as a Platform for Space Engineering Tools. Holger Sdunnus (eta max space GmbH, Germany)
") 147 Appendix J Presentation of the Open Frontier Framework as a Platform for Space Engineering Tools Holger Sdunnus (eta max space GmbH, Germany) 148 149 Presentation of the Open Frontier Framework as
147 Appendix J Presentation of the Open Frontier Framework as a Platform for Space Engineering Tools Holger Sdunnus (eta max space GmbH, Germany) 148 149 Presentation of the Open Frontier Framework as
CONTROL ALGORITHMS FOR SPACE TUG RENDEZVOUS. Statement of Project Fall Author: Timothée de Mierry
 CONTROL ALGORITHMS FOR SPACE TUG RENDEZVOUS Statement of Project 16.621 Fall 2002 Author: Timothée de Mierry Advisor: Olivier de Weck Partner: Gergana Bounova Thursday, October 3 rd 1. Introduction The
CONTROL ALGORITHMS FOR SPACE TUG RENDEZVOUS Statement of Project 16.621 Fall 2002 Author: Timothée de Mierry Advisor: Olivier de Weck Partner: Gergana Bounova Thursday, October 3 rd 1. Introduction The
CNES robotics activities : Towards long distance on-board decision-making navigation
 CNES robotics activities : Towards long distance on-board decision-making navigation S.MORENO sabine.moreno@cnes.fr Contents I. Introduction 1.Context 2.Definition II. CNES activities 1.Perception 2.Localisation
CNES robotics activities : Towards long distance on-board decision-making navigation S.MORENO sabine.moreno@cnes.fr Contents I. Introduction 1.Context 2.Definition II. CNES activities 1.Perception 2.Localisation
AFSPC Astrodynamic Standard Software
 AFSPC Astrodynamic Standard Software Last Revision: 29-March-2012 AFSPC/A9AC maintains and distributes, for AFSPC, the following Astrodynamic Standard Software. All software listed here contains these
AFSPC Astrodynamic Standard Software Last Revision: 29-March-2012 AFSPC/A9AC maintains and distributes, for AFSPC, the following Astrodynamic Standard Software. All software listed here contains these
Optimal control and applications in aerospace
 Optimal control and applications in aerospace Collaborations: Emmanuel Trélat (LJLL), Max Cerf (Airbus) Laboratoire Jacques-Louis Lions Université Pierre et Marie Curie zhu@ann.jussieu.fr - Why aerospace
Optimal control and applications in aerospace Collaborations: Emmanuel Trélat (LJLL), Max Cerf (Airbus) Laboratoire Jacques-Louis Lions Université Pierre et Marie Curie zhu@ann.jussieu.fr - Why aerospace
Small-satellite Launch Services Market, Quarterly Update Q1 2018, Forecast to 2030
 Small-satellite Launch Services Market, Quarterly Update Q1 2018, Forecast to 2030 State of the Small-satellite Industry in Q1, 2018 Global Aerospace & Defense Research Team at Frost & Sullivan March 2018
Small-satellite Launch Services Market, Quarterly Update Q1 2018, Forecast to 2030 State of the Small-satellite Industry in Q1, 2018 Global Aerospace & Defense Research Team at Frost & Sullivan March 2018
Eclipse as a Web 2.0 Application Position Paper
 Eclipse Summit Europe Server-side Eclipse 11 12 October 2006 Eclipse as a Web 2.0 Application Position Paper Automatic Web 2.0 - enabling of any RCP-application with Xplosion Introduction If todays Web
Eclipse Summit Europe Server-side Eclipse 11 12 October 2006 Eclipse as a Web 2.0 Application Position Paper Automatic Web 2.0 - enabling of any RCP-application with Xplosion Introduction If todays Web
The Virtual Lab for Controlling Real Experiments via Internet
 The Virtual Lab for Controlling Real Experiments via Internet Christof Röhrig and Andreas Jochheim Department of Electrical Engineering University of Hagen D-58084 Hagen, Germany christof.roehrig@fernuni-hagen.de
The Virtual Lab for Controlling Real Experiments via Internet Christof Röhrig and Andreas Jochheim Department of Electrical Engineering University of Hagen D-58084 Hagen, Germany christof.roehrig@fernuni-hagen.de
MSc(IT) Program. MSc(IT) Program Educational Objectives (PEO):
 Program. MSc(IT) Program Educational Objectives (PEO):") MSc(IT) Program Master of Science (Information Technology) is an intensive program designed for students who wish to pursue a professional career in Information Technology. The courses have been carefully
MSc(IT) Program Master of Science (Information Technology) is an intensive program designed for students who wish to pursue a professional career in Information Technology. The courses have been carefully
Can Harmonization be Achieved via Standardization?: New Concrete Opportunities from the CCSDS Mission Operations Services
 Can Harmonization be Achieved via Standardization?: New Concrete Opportunities from the CCSDS Mission Operations Services CCSDS Spacecraft (SM&C) Mario Merri (ESA), Chair GSAW, Los Angeles, USA - 1 Mar
Can Harmonization be Achieved via Standardization?: New Concrete Opportunities from the CCSDS Mission Operations Services CCSDS Spacecraft (SM&C) Mario Merri (ESA), Chair GSAW, Los Angeles, USA - 1 Mar
An Integrated Approach to Managing Windchill Customizations. Todd Baltes Lead PLM Technical Architect SRAM
 An Integrated Approach to Managing Windchill Customizations Todd Baltes Lead PLM Technical Architect SRAM Event hashtag is #PTCUSER10 Join the conversation! Topics What is an Integrated Approach to Windchill
An Integrated Approach to Managing Windchill Customizations Todd Baltes Lead PLM Technical Architect SRAM Event hashtag is #PTCUSER10 Join the conversation! Topics What is an Integrated Approach to Windchill
Strapdown inertial navigation technology
 Strapdown inertial navigation technology D. H. Titterton and J. L. Weston Peter Peregrinus Ltd. on behalf of the Institution of Electrical Engineers Contents Preface Page xiii 1 Introduction 1 1.1 Navigation
Strapdown inertial navigation technology D. H. Titterton and J. L. Weston Peter Peregrinus Ltd. on behalf of the Institution of Electrical Engineers Contents Preface Page xiii 1 Introduction 1 1.1 Navigation
MHS Instrument Pre-Launch Characteristics
 MHS Instrument Pre-Launch Characteristics Jörg Ackermann, EUMETSAT, October 2017 The main objective of satellite instruments pre-launch characterisation is to ensure that the observed instrument performance
MHS Instrument Pre-Launch Characteristics Jörg Ackermann, EUMETSAT, October 2017 The main objective of satellite instruments pre-launch characterisation is to ensure that the observed instrument performance
Angles-Only Autonomous Rendezvous Navigation to a Space Resident Object
 aa.stanford.edu damicos@stanford.edu stanford.edu Angles-Only Autonomous Rendezvous Navigation to a Space Resident Object Josh Sullivan PhD. Candidate, Space Rendezvous Laboratory PI: Dr. Simone D Amico
aa.stanford.edu damicos@stanford.edu stanford.edu Angles-Only Autonomous Rendezvous Navigation to a Space Resident Object Josh Sullivan PhD. Candidate, Space Rendezvous Laboratory PI: Dr. Simone D Amico
SENTINEL-3 PROPERTIES FOR GPS POD
 SENTINEL-3 PROPERTIES FOR GPS POD COPERNICUS SENTINEL-1, -2 AND -3 PRECISE ORBIT DETERMINATION SERVICE (SENTINELSPOD) Prepared by: X E.J. Calero Project Engineer Signed by: Emilio José Calero Rodriguez
SENTINEL-3 PROPERTIES FOR GPS POD COPERNICUS SENTINEL-1, -2 AND -3 PRECISE ORBIT DETERMINATION SERVICE (SENTINELSPOD) Prepared by: X E.J. Calero Project Engineer Signed by: Emilio José Calero Rodriguez
Heliophysics Python Plan
 Heliophysics Python Plan Russell A. Stoneback Center for Space Sciences Photon Audio Lab The University of Texas at Dallas 27 July 2018 Snakes on a Spaceship: The Return of the Python Motivation Developing
Heliophysics Python Plan Russell A. Stoneback Center for Space Sciences Photon Audio Lab The University of Texas at Dallas 27 July 2018 Snakes on a Spaceship: The Return of the Python Motivation Developing
Bet & MathWorks By Bet Herrera Sucarrat Application Engineer MathWorks
 Bet & MathWorks By Bet Herrera Sucarrat Application Engineer MathWorks 2015 The MathWorks, Inc. 1 Researchers Test Control Algorithms for NASA SPHERES Satellites with a MATLAB Based Simulator Challenge
Bet & MathWorks By Bet Herrera Sucarrat Application Engineer MathWorks 2015 The MathWorks, Inc. 1 Researchers Test Control Algorithms for NASA SPHERES Satellites with a MATLAB Based Simulator Challenge
Build Tools. Software Engineering SS A tool was needed. Agenda for today. Build tools. Software complexity. Build tools
 Agenda for today Build Tools Software Engineering SS 2007 Build Tools Available 4. Presentation Objectives - Use modern build systems for software Software Engineering, lecture #: Topic 2 Software complexity
Agenda for today Build Tools Software Engineering SS 2007 Build Tools Available 4. Presentation Objectives - Use modern build systems for software Software Engineering, lecture #: Topic 2 Software complexity
ESA round table. September L. Goulard PY. Bretécher
 Next generation processors for space ESA round table September 2006 L. Goulard PY. Bretécher Agenda Brief history of processors used at Sodern On going developments AT697E evaluation Requirement review
Next generation processors for space ESA round table September 2006 L. Goulard PY. Bretécher Agenda Brief history of processors used at Sodern On going developments AT697E evaluation Requirement review
Build Tools. Software Engineering SS 2007
 Build Tools Software Engineering SS 2007 Agenda for today Build Tools 1. Motivation 2. Key Concepts 3. Tools Available 4. Presentation 5. Discussion Objectives - Use modern build systems for software Software
Build Tools Software Engineering SS 2007 Agenda for today Build Tools 1. Motivation 2. Key Concepts 3. Tools Available 4. Presentation 5. Discussion Objectives - Use modern build systems for software Software
PRODAS Newsletter. Announcing the Release of PRODAS Version 3.6. MATLAB/Simulink Trajectory Module
 PRODAS Newsletter If You Can t Get a Bigger Target Fall 2011 Announcing the Release of PRODAS Version 3.6 As times change, so do the tools we use to do our work. As Arrow Tech gets deeper and deeper into
PRODAS Newsletter If You Can t Get a Bigger Target Fall 2011 Announcing the Release of PRODAS Version 3.6 As times change, so do the tools we use to do our work. As Arrow Tech gets deeper and deeper into
Laser Beacon Tracking for High-Accuracy Attitude Determination
 Laser Beacon Tracking for High-Accuracy Attitude Determination Tam Nguyen Massachusetts Institute of Technology 29 th AIAA/USU Conference on Small Satellites SSC15-VIII-2 08/12/2015 Outline Motivation
Laser Beacon Tracking for High-Accuracy Attitude Determination Tam Nguyen Massachusetts Institute of Technology 29 th AIAA/USU Conference on Small Satellites SSC15-VIII-2 08/12/2015 Outline Motivation
Operational use of the Orfeo Tool Box for the Venµs Mission
 Operational use of the Orfeo Tool Box for the Venµs Mission Thomas Feuvrier http://uk.c-s.fr/ Free and Open Source Software for Geospatial Conference, FOSS4G 2010, Barcelona Outline Introduction of the
Operational use of the Orfeo Tool Box for the Venµs Mission Thomas Feuvrier http://uk.c-s.fr/ Free and Open Source Software for Geospatial Conference, FOSS4G 2010, Barcelona Outline Introduction of the
OHB System AG International Conference on Space Optics ICSO 2016 Prepared by Raffello MIGLIORE Date , Biarritz.
 International Conference on Space Optics ICSO 2016 Prepared by Raffello MIGLIORE Date 19.10.2016, Biarritz Outlook on EDRS-C EDRS-C / European Data Relay System EDRS-C, designed and developed by OHB System,
International Conference on Space Optics ICSO 2016 Prepared by Raffello MIGLIORE Date 19.10.2016, Biarritz Outlook on EDRS-C EDRS-C / European Data Relay System EDRS-C, designed and developed by OHB System,
Getting Started Processing DSN Data with ODTK
 Getting Started Processing DSN Data with ODTK 1 Introduction ODTK can process several types of tracking data produced by JPL s deep space network (DSN): two-way sequential range, two- and three-way Doppler,
Getting Started Processing DSN Data with ODTK 1 Introduction ODTK can process several types of tracking data produced by JPL s deep space network (DSN): two-way sequential range, two- and three-way Doppler,
University of Texas Center for Space Research. ICESAT/GLAS CSR SCF Release Notes for Orbit and Attitude Determination
 University of Texas Center for Space Research ICESAT/GLAS CSR SCF Notes for Orbit and Attitude Determination Charles Webb Tim Urban Bob Schutz Version 1.0 August 2006 CSR SCF Notes for Orbit and Attitude
University of Texas Center for Space Research ICESAT/GLAS CSR SCF Notes for Orbit and Attitude Determination Charles Webb Tim Urban Bob Schutz Version 1.0 August 2006 CSR SCF Notes for Orbit and Attitude
Zero Robotics Autonomous Space Capture Challenge Manual
 Zero Robotics Autonomous Space Capture Challenge Manual v1.3 1 Introduction 1.1 Conventions Vectors All vectors in this document are denoted with a bold face font. Of special note is the position vector
Zero Robotics Autonomous Space Capture Challenge Manual v1.3 1 Introduction 1.1 Conventions Vectors All vectors in this document are denoted with a bold face font. Of special note is the position vector
ifp Universität Stuttgart Performance of IGI AEROcontrol-IId GPS/Inertial System Final Report
 Universität Stuttgart Performance of IGI AEROcontrol-IId GPS/Inertial System Final Report Institute for Photogrammetry (ifp) University of Stuttgart ifp Geschwister-Scholl-Str. 24 D M. Cramer: Final report
Universität Stuttgart Performance of IGI AEROcontrol-IId GPS/Inertial System Final Report Institute for Photogrammetry (ifp) University of Stuttgart ifp Geschwister-Scholl-Str. 24 D M. Cramer: Final report
Defining Domain-Specific Modeling Languages
 Defining Domain-Specific Modeling Languages 1 st Oct 2008 Juha-Pekka Tolvanen MetaCase 1 Relevant language classifications to start with General-Purpose / Domain-Specific Narrow area of interest Often
Defining Domain-Specific Modeling Languages 1 st Oct 2008 Juha-Pekka Tolvanen MetaCase 1 Relevant language classifications to start with General-Purpose / Domain-Specific Narrow area of interest Often
Sentinel-2 Calibration and Validation : from the Instrument to Level 2 Products
 Sentinel-2 Calibration and Validation : from the Instrument to Level 2 Products Vincent Lonjou a, Thierry Tremas a, Sophie Lachérade a, Cécile Dechoz a, Florie Languille a, Aimé Meygret a, Olivier Hagolle
Sentinel-2 Calibration and Validation : from the Instrument to Level 2 Products Vincent Lonjou a, Thierry Tremas a, Sophie Lachérade a, Cécile Dechoz a, Florie Languille a, Aimé Meygret a, Olivier Hagolle
Ground Control Segment automated deployment and configuration with ANSIBLE and GIT
 SpaceOps Conferences 28 May - 1 June 2018, 2018, Marseille, France 2018 SpaceOps Conference 10.2514/6.2018-2337 Ground Control Segment automated deployment and configuration with ANSIBLE and GIT Rémi PIEPLU
SpaceOps Conferences 28 May - 1 June 2018, 2018, Marseille, France 2018 SpaceOps Conference 10.2514/6.2018-2337 Ground Control Segment automated deployment and configuration with ANSIBLE and GIT Rémi PIEPLU
H2020 Space Robotic SRC- OG4
 H2020 Space Robotic SRC- OG4 2 nd PERASPERA workshop Presentation by Sabrina Andiappane Thales Alenia Space France This project has received funding from the European Union s Horizon 2020 research and
H2020 Space Robotic SRC- OG4 2 nd PERASPERA workshop Presentation by Sabrina Andiappane Thales Alenia Space France This project has received funding from the European Union s Horizon 2020 research and
Development of Formation Flight and Docking Algorithms Using the SPHERES Testbed
 Development of Formation Flight and Docking Algorithms Using the Testbed Prof. David W. Miller MIT Allen Chen, Alvar Saenz-Otero, Mark Hilstad, David W. Miller Introduction : Synchronized Position Hold
Development of Formation Flight and Docking Algorithms Using the Testbed Prof. David W. Miller MIT Allen Chen, Alvar Saenz-Otero, Mark Hilstad, David W. Miller Introduction : Synchronized Position Hold
Computer Principles and Components 1
 Computer Principles and Components 1 Course Map This module provides an overview of the hardware and software environment being used throughout the course. Introduction Computer Principles and Components
Computer Principles and Components 1 Course Map This module provides an overview of the hardware and software environment being used throughout the course. Introduction Computer Principles and Components
Simulation of sun sensors using STK
 Simulation of sun sensors using STK Han Gao, Jinxu Huang, Steen Eiler Jørgensen, Daniel Umicevic, Linlin Wang, Krzysztof Wojtanowicz and Ying Yan 1 Project definition The project definition reads: Based
Simulation of sun sensors using STK Han Gao, Jinxu Huang, Steen Eiler Jørgensen, Daniel Umicevic, Linlin Wang, Krzysztof Wojtanowicz and Ying Yan 1 Project definition The project definition reads: Based
Hints for Instructors
 APPENDIX C Hints for Instructors This appendix is addressed to faculty members and graduate students teaching Math 473. Most of it should apply to other Math courses that use computers, with suitable changes.
APPENDIX C Hints for Instructors This appendix is addressed to faculty members and graduate students teaching Math 473. Most of it should apply to other Math courses that use computers, with suitable changes.
Digital Control for Space Power Management Devices
 Template reference : 100182079N-EN Digital Control for Space Power Management Devices Work conducted under ESA Contract nr.21826/08/nl/lvh DIGITAL POWER CONTROL Management of power devices via digital
Template reference : 100182079N-EN Digital Control for Space Power Management Devices Work conducted under ESA Contract nr.21826/08/nl/lvh DIGITAL POWER CONTROL Management of power devices via digital
CCSDS and NASA Standards for Satellite Control Network Interoperability
 InterPlanetary Network & Information Systems Directorate CCSDS and NASA Standards for Satellite Network Interoperability Peter Shames Jet Propulsion Laboratory California Institute of Technology The Fundamental
InterPlanetary Network & Information Systems Directorate CCSDS and NASA Standards for Satellite Network Interoperability Peter Shames Jet Propulsion Laboratory California Institute of Technology The Fundamental
MERIS Instrument Status
 MERIS Instrument Status presented by Stefan Weiß Photo: Courtesy Alcatel Space Industries Page 1 MERIS Instrument Status Functional Description & Hardware overview Functional check-out & Operations Telemetry
MERIS Instrument Status presented by Stefan Weiß Photo: Courtesy Alcatel Space Industries Page 1 MERIS Instrument Status Functional Description & Hardware overview Functional check-out & Operations Telemetry
Agile ACMS Software Fast Prototyping for Real-time Validation with Hardware in the Loop
 Agile ACMS Software Fast Prototyping for Real-time Validation with Hardware in the Loop Denis Fertin European Space Technology Centre (ESTEC), European Space Agency, Noordwijk, The Netherlands Abstract
Agile ACMS Software Fast Prototyping for Real-time Validation with Hardware in the Loop Denis Fertin European Space Technology Centre (ESTEC), European Space Agency, Noordwijk, The Netherlands Abstract
AN ANALYTICAL APPROACH TO AUTONOMOUS OPTICAL NAVIGATION FOR A CUBESAT MISSION TO A BINARY ASTEROID SYSTEM
 4 th IAA Conference on University Satellite Missions and CubeSat Workshop 4-7 December 2017 Rome, Italy AN ANALYTICAL APPROACH TO AUTONOMOUS OPTICAL NAVIGATION FOR A CUBESAT MISSION TO A BINARY ASTEROID
4 th IAA Conference on University Satellite Missions and CubeSat Workshop 4-7 December 2017 Rome, Italy AN ANALYTICAL APPROACH TO AUTONOMOUS OPTICAL NAVIGATION FOR A CUBESAT MISSION TO A BINARY ASTEROID
The A-Train Constellation
 The A-Train Constellation 9 June 2016 Ronald Boain JPL/Caltech/NASA What's in a Name? The A-Train Constellation is known by several names: P. M. Constellation P. M. stands for post meridiem giving reference
The A-Train Constellation 9 June 2016 Ronald Boain JPL/Caltech/NASA What's in a Name? The A-Train Constellation is known by several names: P. M. Constellation P. M. stands for post meridiem giving reference
"Fast, High-Fidelity, Multi-Spacecraft Trajectory Simulation for Space Catalogue Applications"
 "Fast, High-Fidelity, Multi-Spacecraft Trajectory Simulation for Space Catalogue Applications" Ryan P. Russell Assistant Professor Nitin Arora Ph.D. Candidate School of Aerospace Engineering Georgia Institute
"Fast, High-Fidelity, Multi-Spacecraft Trajectory Simulation for Space Catalogue Applications" Ryan P. Russell Assistant Professor Nitin Arora Ph.D. Candidate School of Aerospace Engineering Georgia Institute
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.2: Sensors Jürgen Sturm Technische Universität München Sensors IMUs (inertial measurement units) Accelerometers
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.2: Sensors Jürgen Sturm Technische Universität München Sensors IMUs (inertial measurement units) Accelerometers
Interpreting SECCHI White Light Images: FOV Sensitivity & Stereo Viewing
 Interpreting SECCHI White Light Images: FOV Sensitivity & Stereo Viewing Paulett Liewer,, JPL; Russ Howard & Dennis Socker,, NRL SECCHI Consortium Meeting - July 2001 Abingdon,, England 1. Motivation:
Interpreting SECCHI White Light Images: FOV Sensitivity & Stereo Viewing Paulett Liewer,, JPL; Russ Howard & Dennis Socker,, NRL SECCHI Consortium Meeting - July 2001 Abingdon,, England 1. Motivation:
Research on Accessing Remotely Sensed Data Efficiently Stored in Oracle under Matlab Environment Jing Dong*
 6th International Conference on Sensor Network and Computer Engineering (ICSNCE 2016) Research on Accessing Remotely Sensed Data Efficiently Stored in Oracle under Matlab Environment Jing Dong* School
6th International Conference on Sensor Network and Computer Engineering (ICSNCE 2016) Research on Accessing Remotely Sensed Data Efficiently Stored in Oracle under Matlab Environment Jing Dong* School
Using an Artificial Intelligence Tool to Perform Science Data Downlink Planning as Part of the Mission Planning Activities of Mars Express
 Using an Artificial Intelligence Tool to Perform Science Data Downlink as Part of the Activities of Mars Express Erhard Rabenau NOVA Space Associates Ltd 11 Kingsmead Square, Bath, BA1 2AB, UK Erhard.Rabenau@esa.int
Using an Artificial Intelligence Tool to Perform Science Data Downlink as Part of the Activities of Mars Express Erhard Rabenau NOVA Space Associates Ltd 11 Kingsmead Square, Bath, BA1 2AB, UK Erhard.Rabenau@esa.int
Terrestrial GPS setup Fundamentals of Airborne LiDAR Systems, Collection and Calibration. JAMIE YOUNG Senior Manager LiDAR Solutions
 Terrestrial GPS setup Fundamentals of Airborne LiDAR Systems, Collection and Calibration JAMIE YOUNG Senior Manager LiDAR Solutions Topics Terrestrial GPS reference Planning and Collection Considerations
Terrestrial GPS setup Fundamentals of Airborne LiDAR Systems, Collection and Calibration JAMIE YOUNG Senior Manager LiDAR Solutions Topics Terrestrial GPS reference Planning and Collection Considerations
'Smartphone satellite' developed by Surrey space researchers
 Press Release 24th January 2011 'Smartphone satellite' developed by Surrey space researchers Space researchers at the University of Surrey and Surrey Satellite Technology Limited (SSTL) have developed
Press Release 24th January 2011 'Smartphone satellite' developed by Surrey space researchers Space researchers at the University of Surrey and Surrey Satellite Technology Limited (SSTL) have developed
COOL-COVERINGS. André Santos, The Netherlands Copyright Active Space Technologies
 COOL-COVERINGS André Santos, The Netherlands 21-03-2012 Copyright Active Space Technologies 2004-2011 Young and competent company Started in 2007 in Germany, in 2004 in Portugal Role Support scientific
COOL-COVERINGS André Santos, The Netherlands 21-03-2012 Copyright Active Space Technologies 2004-2011 Young and competent company Started in 2007 in Germany, in 2004 in Portugal Role Support scientific