openpowerlink over Xenomai
|
|
|
- Derick Stephens
- 6 years ago
- Views:
Transcription

1 openpowerlink over Xenomai Pierre Ficheux 02/2017 1
2 $ whoami French embedded Linux developer, writer and teacher Smile-ECS (Embedded & Connected Systems) 2
3 POWERLINK 3
4 Industrial bus Used to connect industrial devices in real time mode Main standards are both serial and/or Ethernet CAN MODBUS (-TCP) Profinet EtherCAT AFDX (Avionics Full DupleX) POWERLINK Ethernet is a standard Easy to integrate, cheap hardware and good performances (standard CAN is 1 Mbps) Homogeneous networking (routing, etc.) No RT because of collision detection 4
5 POWERLINK Deterministic Ethernet based industrial bus Originally created by B&R automation (Austria) in 2001 Managed since 2003 by open organization EPSG (Ethernet POWERLINK Standardization Group) Leverage advantages of Ethernet for RT networking systems 1.8 M systems installed (2016) Min cycle time is 100 µs, 240 nodes on a single network Software only works on standard Ethernet Avoid collisions thanks to a software only protocol :-) Open-source version (2.x) openpowerlink available from SourceForge Now used by B&R hardware (PLC) 5

6 POWERLINK frame Powerlink frame inside Ethernet payload 6
7 POWERLINK protocol One manager node (MN) and several controlled nodes (CN) Cycle divided in 3 steps MN synchronizes CNs with a SoC (Start of Cycle) frame which starts isochronous phase (RT) CN receives PReq (Poll Request) from MN, and replies with PRes (Poll Response) and data (RT) Last step is asynchronous phase (no RT) started with SoA. Addressed node should answer ASnd Standard IP-based protocols and addressing can be used during the asynchronous phase 7

8 POWERLINK protocol RT 8
9 openpowerlink Open source implementation of POWERLINK stack BSD license Support for Linux, Windows, Xilinx/Altera FPGAs Official support for x86, ARM (Zynq) CMake based CMAKE_TOOLCHAIN_FILE for crosscompilation Buildroot integration by Smile-ECS (latest stable 2.4.1) Building process : Stack Drivers (if necessary) Demo applications MN/CN (console, Qt) 9
 About > 10 supported controllers No Linux mainlining Hard to debug (kernel space) user")
10 Application in user space Stack and drivers in kernel space High performance and precision Architecture 1 (kernel) Specific drivers (stack/src/kernel/edrv for Ethernet drivers) About > 10 supported controllers No Linux mainlining Hard to debug (kernel space) user kernel 10

11 Architecture 2 (user) Move stack to user space Use libpcap library (tcpdump) to talk with standard Linux driver Proven solution Much easier to debug Based on Linux NIC drivers Better with PREEMPT_RT patch user 100 µs jitter (only 40 µs in kernel) 11
12 Xenomai 12
13 Standard Linux & RT :-( 13
14 Linux/Xenomai & RT :-) 14
15 Linux & RT Using Linux as RTOS is very interesting POSIX Hybrid approach UNIX + some RT tasks Usable as a standard UNIX 2 solutions : Upgrading Linux kernel RT performance (PREEMPT_RT, the official way) Adding a RT co-kernel sharing hardware with Linux (RTLinux, RTAI, Xenomai) 15
16 PREEMPT_RT Maintained by Thomas Gleixner Mostly used on x86 (but runs on most recent ARM, Nios2, Microblaze) Needs a mainline kernel (or something like) Very easy to install (just a kernel patch) Same programming API as standard kernel (user and kernel space) 50 µs jitter (x86/atom), 150 µs on Raspberry Pi B+ Currently used with openpowerlink Official project of Linux foundation since Oct. 2015! 16
17 Co-kernel Adding co-kernel for RT tasks RT subsystem inside kernel module(s) Needs kernel patch for hardware resource (IRQ) virtualization Main projects Kernel only (RTLinux, 1996) dead Kernel & (partially) user space (RTAI, 1998) Full user space integration (Xenomai, 2001) 10 µs jitter on Atom/x86, 50 µs on Raspberry Pi B+ 17

18 RTLinux architecture (kernel only) 18
19 Xenomai Created by Philippe Gerum Xenomai = realtime Linux subsystem RT tasks in user space RT driver API = RTDM for Real Time Driver Model RT network stack = RTnet! Include skins for POSIX, VxWorks, VRTX, uitron, psos+, etc. Runs on top of I-pipe (Interrupt pipeline) Xenomai domain (RT) Linux domain (No RT) Currently and uses co-kernel (Cobalt) or PREEMPT_RT (Mercury) GPL license (kernel), LGPL (user) 19

20 Xenomai 3 architecture (Cobalt) 20
 Stalled/unstall domain instead of hardware CLI/STI")
21 I-pipe I-pipe = interrupt source for domains (Xenomai, Linux) based on ADEOS technology Highest priority to RT domain (Xenomai) Stalled/unstall domain instead of hardware CLI/STI 21
22 Xenomai in industry CANFestival (CANopen stack) PEAK System CAN boards drivers EtherCAT master RTDM SPI driver (i.mx28) BEREMIZ, integrated development environment for machine automation And much more... 22
23 openpowerlink over Xenomai 23

 Geoffrey Bonneville for improvement and Android")

24 Proof of concept Started as 2 internships Damien Lagneux for the first version on i.mx6 boards and Buildroot (Armadeus APF6, RIOTboard RTnet support for FEC controller) Geoffrey Bonneville for improvement and Android testing (AIOSP) on BeagleBone Black No Raspberry Pi because of USB based Ethernet (though there is Pi2 port for openpowerlink!) Using openpowerlink in Xenomai domain PREEMPT_RT / Xenomai comparison! 24
25 RTnet Xenomai v2 contribution, merged with v3 Based on RTDM (protocol device) Limited hardware support (dedicated driver API) FEC, AT91, AM335x (BB Black, external contrib) RTL8139, Natsemi, PCnet32 MPC8xxx Example session (BB Black) # insmod rtnet.ko # insmod rt_smsc.ko # insmod rt_davinci_mdio.ko # insmod rt_ticpsw.ko # insmod rtpacket.ko # insmod rtipv4.ko # rtifconfig rteth0 up # rtroute add :22:15:80:D5:88 dev rteth0 # rtping
26 Architecture One openpowerlink architecture is based on libpcap Libpcap (Linux) is based on packet protocol Xenomai RTnet stack includes packet socket support ( rtpacket module) Porting libpcap to Xenomai is quite difficult! Hardware is limited by RTnet driver availability (but it's just an POC!) 26
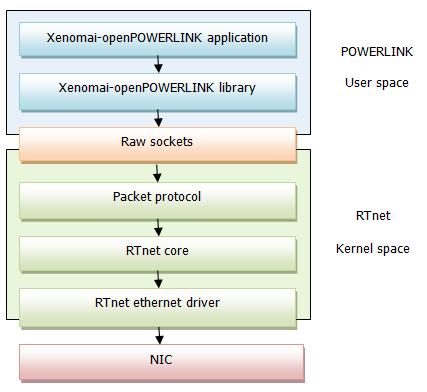
27 Architecture 27
28 Architecture PCAP layer removed Sending / receiving packet (through packet socket) directly from/to the openpowerlink stack RTnet architecture is close to openpowerlink kernel architecture 28

29 Test configuration 1 i.mx6 board as MN 2 B&R modules as CN 1 B&R capture module (timestamping) 1 PC for saving frames 29
 Stress with cpuburn, dd, hackbench Jitter for 500 µs cycle Better than")
30 Test and results Xenomai solution is close to Linux kernel version of openpowerlink (architecture 1) Based on Baumgartner/Schoenegger/Wallner papers (B&R) Stress with cpuburn, dd, hackbench Jitter for 500 µs cycle Better than PREEMPT_RT! 30
31 Conclusion + future work Currently not stable enough for industrial use stack debug and optimization Test with more CN Work to be done with B&R mainlining in openpowerlink project more test with available POWERLINK devices PREEMPT_RT version is fair enough for most projects Currently not a strategic market for Smile-ECS (except one customer) 31
32 Bibliography Introduction to RTnet, P. Ficheux, Open Silicium #15 (french) Improving openpowerlink with RTnet, G. Bonneville, Open Silicium #19 (french) openpowerlink et Xenomai D. Lagneux (Internship report, french) A(I)OSP, Android Industrial - Open Source Project G. Bonneville (Internship report, sfrench) 32
Building RT image with Yocto
 Pierre Ficheux (pierre.ficheux@smile.fr) 02/2018 1 Disclaimer Poor English speaker! But good French speaker and writer :-) Loin du français je meurs (Louis-Ferdinand Céline) 2 $ whoami Embedded Linux developer,
Pierre Ficheux (pierre.ficheux@smile.fr) 02/2018 1 Disclaimer Poor English speaker! But good French speaker and writer :-) Loin du français je meurs (Louis-Ferdinand Céline) 2 $ whoami Embedded Linux developer,
Industrial Ethernet Comparison for Motion Control Applications
 Industrial Ethernet Comparison for Motion Control Applications Sari Germanos sari.germanos@ethernet-powerlink.org Technology Marketing Ethernet POWERLINK Standardization Group Topology comparison - Conventional
Industrial Ethernet Comparison for Motion Control Applications Sari Germanos sari.germanos@ethernet-powerlink.org Technology Marketing Ethernet POWERLINK Standardization Group Topology comparison - Conventional
Performance Evaluation of Xenomai 3
 Performance Evaluation of Xenomai 3 Ching-Chun (Jim) Huang **, Chan-Hsiang Lin **, and Che-Kang Wu * * Department of Computer Science and Information Engineering, National Cheng Kung University, Taiwan
Performance Evaluation of Xenomai 3 Ching-Chun (Jim) Huang **, Chan-Hsiang Lin **, and Che-Kang Wu * * Department of Computer Science and Information Engineering, National Cheng Kung University, Taiwan
Performance Evaluation of openpowerlink
 Performance Evaluation of openpowerlink Yang Minqiang, Li Xuyuan, Nicholas Mc Guire, Zhou Qingguo Distributed & Embedded System Lab, SISE, Lanzhou University, China Tianshui South Road 222,Lanzhou,P.R.China
Performance Evaluation of openpowerlink Yang Minqiang, Li Xuyuan, Nicholas Mc Guire, Zhou Qingguo Distributed & Embedded System Lab, SISE, Lanzhou University, China Tianshui South Road 222,Lanzhou,P.R.China
Linux Xenomai UAV Sensor platform.
 Linux Xenomai UAV Sensor platform. Hard real time sensor platform for: MSPIL (Mobile Sensor Platform Innovation Lab) AMOS (Autonomous Marine Operations and Systems) AUV (Autonomous Underwater Vehicle)
Linux Xenomai UAV Sensor platform. Hard real time sensor platform for: MSPIL (Mobile Sensor Platform Innovation Lab) AMOS (Autonomous Marine Operations and Systems) AUV (Autonomous Underwater Vehicle)
ETHERNET POWERLINK ASYNCHRONOUS PHASE EXAMINATION
 ETHERNET POWERLINK ASYNCHRONOUS PHASE EXAMINATION VÁCLAV KACZMARCZYK MICHAL ŠÍR ZDENĚK BRADÁČ Department of Control and Instrumentation Brno University of Technology Kolejní 2906/4, Brno CZECH REPUBLIC
ETHERNET POWERLINK ASYNCHRONOUS PHASE EXAMINATION VÁCLAV KACZMARCZYK MICHAL ŠÍR ZDENĚK BRADÁČ Department of Control and Instrumentation Brno University of Technology Kolejní 2906/4, Brno CZECH REPUBLIC
openpowerlink FPGA Slave Reference Design Author: Zelenka Joerg Version: V1.0 Date: 27/10/2009 User Guide.doc
 User Guide openpowerlink FPGA Slave Reference Design Author: Zelenka Joerg Version: V1.0 Date: 27/10/2009 File: INDEX 1 Document Overview... 3 2 Design Features... 3 3 Performance Restriction... 3 4 Requirements...
User Guide openpowerlink FPGA Slave Reference Design Author: Zelenka Joerg Version: V1.0 Date: 27/10/2009 File: INDEX 1 Document Overview... 3 2 Design Features... 3 3 Performance Restriction... 3 4 Requirements...
Generic term for using the Ethernet standard in automation / industrial applications
 Seite 24 Industrial Ethernet Generic term for using the Ethernet standard in automation / industrial applications Specific Quality of Service requirements Real-time Cycle time (e.g. < 1 ms for motion control
Seite 24 Industrial Ethernet Generic term for using the Ethernet standard in automation / industrial applications Specific Quality of Service requirements Real-time Cycle time (e.g. < 1 ms for motion control
Embedded GNU/Linux and Real-Time an executive summary
 Embedded GNU/Linux and Real-Time an executive summary Robert Berger Embedded Software Specialist Stratigou Rogakou 24, GR-15125 Polydrosso/Maroussi, Athens, Greece Phone : (+ 30) 697 593 3428, Fax: (+
Embedded GNU/Linux and Real-Time an executive summary Robert Berger Embedded Software Specialist Stratigou Rogakou 24, GR-15125 Polydrosso/Maroussi, Athens, Greece Phone : (+ 30) 697 593 3428, Fax: (+
LINUX AND REALTIME 1
 LINUX AND REALTIME 1 PRESENTATION Pierre Morel - MNIS Paris and Toulouse - France pmorel@mnis.fr Linux Port on new architectures, Realtime and Virtualization OCERA european project on Realtime components
LINUX AND REALTIME 1 PRESENTATION Pierre Morel - MNIS Paris and Toulouse - France pmorel@mnis.fr Linux Port on new architectures, Realtime and Virtualization OCERA european project on Realtime components
The Xenomai Project. The Open Group Conference Paris, April Open Source Engineering
 The Xenomai Project http://freesoftware.fsf.org/projects/xenomai/ The Open Group Conference Paris, April 2002 Philippe Gerum, rpm@xenomai.org roject ID / What is Xenomai? A GNU/Linux-based real-time framework
The Xenomai Project http://freesoftware.fsf.org/projects/xenomai/ The Open Group Conference Paris, April 2002 Philippe Gerum, rpm@xenomai.org roject ID / What is Xenomai? A GNU/Linux-based real-time framework
POWERLINK. For CODESYS. POWERLINK For CODESYS. Integration package of the standard Industrial Ethernet protocol POWERLINK into CODESYS.
 For CODESYS For CODESYS Integration package of the standard Industrial Ethernet protocol into CODESYS. For CODESYS Two standard technologies brought together 2 About is one of the most used real-time Ethernet
For CODESYS For CODESYS Integration package of the standard Industrial Ethernet protocol into CODESYS. For CODESYS Two standard technologies brought together 2 About is one of the most used real-time Ethernet
LINUX SOLUTIONS FOR REAL-TIME ENVIRONMENT
 10 INTERNATIONAL SCIENTIFIC CONFERENCE 19 20 November 2010, GABROVO LINUX SOLUTIONS FOR REAL-TIME ENVIRONMENT Vladimir Germanov Burgas Free University Stanislav Simeonov Burgas Free University Abstract
10 INTERNATIONAL SCIENTIFIC CONFERENCE 19 20 November 2010, GABROVO LINUX SOLUTIONS FOR REAL-TIME ENVIRONMENT Vladimir Germanov Burgas Free University Stanislav Simeonov Burgas Free University Abstract
Security of cyber-physical systems: an old idea
 Security of cyber-physical systems: an old idea Security Issues and Mitigation in Ethernet POWERLINK Jonathan Yung, Hervé Debar and Louis Granboulan AIRBUS Group Innovations & Télécom SudParis February
Security of cyber-physical systems: an old idea Security Issues and Mitigation in Ethernet POWERLINK Jonathan Yung, Hervé Debar and Louis Granboulan AIRBUS Group Innovations & Télécom SudParis February
Development of Real-Time Systems with Embedded Linux. Brandon Shibley Senior Solutions Architect Toradex Inc.
 Development of Real-Time Systems with Embedded Linux Brandon Shibley Senior Solutions Architect Toradex Inc. Overview Toradex ARM-based System-on-Modules Pin-Compatible SoM Families In-house HW and SW
Development of Real-Time Systems with Embedded Linux Brandon Shibley Senior Solutions Architect Toradex Inc. Overview Toradex ARM-based System-on-Modules Pin-Compatible SoM Families In-house HW and SW
Real-time in embedded Linux systems
 Real-time in embedded Linux systems Michael Opdenacker Copyright 2004-2011, Free Electrons. Creative Commons BY-SA 3.0 license Latest update: Nov 2, 2011, Document sources, updates and translations: http://free-electrons.com/docs/realtime
Real-time in embedded Linux systems Michael Opdenacker Copyright 2004-2011, Free Electrons. Creative Commons BY-SA 3.0 license Latest update: Nov 2, 2011, Document sources, updates and translations: http://free-electrons.com/docs/realtime
RTNET for the SPB and LiRE. Patrick Hohmann
 RTNET for the SPB and LiRE Patrick Hohmann www.l3s.de/spb 1 MoRob Modular Educational Robotic Toolbox A project to develop a framework for teaching/research with Robotics Project Partners: L3S Hannover
RTNET for the SPB and LiRE Patrick Hohmann www.l3s.de/spb 1 MoRob Modular Educational Robotic Toolbox A project to develop a framework for teaching/research with Robotics Project Partners: L3S Hannover
Multi-protocol controller for Industry 4.0
 Multi-protocol controller for Industry 4.0 Andreas Schwope, Renesas Electronics Europe With the R-IN Engine architecture described in this article, a device can process both network communications and
Multi-protocol controller for Industry 4.0 Andreas Schwope, Renesas Electronics Europe With the R-IN Engine architecture described in this article, a device can process both network communications and
Debugging realtime application with Ftrace
 Debugging realtime application with Ftrace Pierre Ficheux (pierre.ficheux@smile.fr) 02/2018 1 Disclaimer Poor English speaker! But good French speaker and writer :-) Loin du français je meurs (Louis-Ferdinand
Debugging realtime application with Ftrace Pierre Ficheux (pierre.ficheux@smile.fr) 02/2018 1 Disclaimer Poor English speaker! But good French speaker and writer :-) Loin du français je meurs (Louis-Ferdinand
EtherCAT Master. Dipl.-Ing. (FH) Florian Pose. EPICS Collaboration Meeting, Lund May 25th, Ingenieurgemeinschaft IgH. EtherLab s Open-Source
 Florian Pose. EPICS Collaboration Meeting, Lund May 25th, Ingenieurgemeinschaft IgH. EtherLab s Open-Source") s s Dipl.-Ing. (FH) Florian Pose Ingenieurgemeinschaft IgH EPICS Collaboration Meeting, Lund May 25th, 2016 Rev. fde55f3b904c, May 24, 2016 Ingenieurgemeinschaft IgH http://igh.de 1 / 26 Outline s Rev.
s s Dipl.-Ing. (FH) Florian Pose Ingenieurgemeinschaft IgH EPICS Collaboration Meeting, Lund May 25th, 2016 Rev. fde55f3b904c, May 24, 2016 Ingenieurgemeinschaft IgH http://igh.de 1 / 26 Outline s Rev.
AIT Austrian Institute of Technology Accessing remote I/Os with Ethernet POWERLINK and 4DIAC
 AIT Austrian Institute of Technology Accessing remote I/Os with Ethernet POWERLINK and 4DIAC Filip Andrén Electrical Energy Systems Energy Department W3 Second 4DIAC User s Workshop (4DIAC) 16 th IEEE
AIT Austrian Institute of Technology Accessing remote I/Os with Ethernet POWERLINK and 4DIAC Filip Andrén Electrical Energy Systems Energy Department W3 Second 4DIAC User s Workshop (4DIAC) 16 th IEEE
Real-time Control of Industrial Robot Cell with PowerLink
 Real-time Control of Industrial Robot Cell with PowerLink Lloyd Tran David Barbulovic Department of Automatic Control MSc Thesis TFRT-6048 ISSN 0280-5316 Department of Automatic Control Lund University
Real-time Control of Industrial Robot Cell with PowerLink Lloyd Tran David Barbulovic Department of Automatic Control MSc Thesis TFRT-6048 ISSN 0280-5316 Department of Automatic Control Lund University
System Overview POWERLINK. Basics
 System Overview POWERLINK Basics Why Real-time Industrial Ethernet? Over the course of the last two decades, it has become hard to keep track of the numerous fieldbus systems that have been developed in
System Overview POWERLINK Basics Why Real-time Industrial Ethernet? Over the course of the last two decades, it has become hard to keep track of the numerous fieldbus systems that have been developed in
Benchmark and comparison of real-time solutions based on embedded Linux
 Benchmark and comparison of real-time solutions based on embedded Linux Peter Feuerer August 8, 2007 Table of contents General Motivation Real-time computing Preparations Environment setup Open Realtime
Benchmark and comparison of real-time solutions based on embedded Linux Peter Feuerer August 8, 2007 Table of contents General Motivation Real-time computing Preparations Environment setup Open Realtime
RZ/N1 Multi-Protocol Industrial Ethernet Made Easy
 RZ/N1 Multi-Protocol Industrial Ernet Made Easy Introduction With latest RZ/N1 family, Renesas aims to replace existing multi-chip solutions in industrial controllers, industrial switches and operator
RZ/N1 Multi-Protocol Industrial Ernet Made Easy Introduction With latest RZ/N1 family, Renesas aims to replace existing multi-chip solutions in industrial controllers, industrial switches and operator
Comparative Analysis of a User Space EtherCAT Master Application for Hard Real-time Control
 Comparative Analysis of a User Space EtherCAT Master Application for Hard Real-time Control Raimarius Delgado Ph.D. Student, Department of Electrical and Information Engineering, Seoul National University
Comparative Analysis of a User Space EtherCAT Master Application for Hard Real-time Control Raimarius Delgado Ph.D. Student, Department of Electrical and Information Engineering, Seoul National University
Evaluation of Real-time Performance in Embedded Linux. Hiraku Toyooka, Hitachi. LinuxCon Europe Hitachi, Ltd All rights reserved.
 Evaluation of Real-time Performance in Embedded Linux LinuxCon Europe 2014 Hiraku Toyooka, Hitachi 1 whoami Hiraku Toyooka Software engineer at Hitachi " Working on operating systems Linux (mainly) for
Evaluation of Real-time Performance in Embedded Linux LinuxCon Europe 2014 Hiraku Toyooka, Hitachi 1 whoami Hiraku Toyooka Software engineer at Hitachi " Working on operating systems Linux (mainly) for
DIN EN ISO 9001:2000 certified ADDI-DATA GmbH Dieselstraße 3 D OTTERSWEIER Technical support: +49 (0)7223 / Introduction Linux drivers
7223 / Introduction Linux drivers") DIN EN ISO 9001:2000 certified ADDI-DATA GmbH Dieselstraße 3 D-77833 OTTERSWEIER Technical support: +49 (0)7223 / 9493 0 Introduction Linux drivers Edition: 01.05 09/2006 Contents Introduction Linux driver
DIN EN ISO 9001:2000 certified ADDI-DATA GmbH Dieselstraße 3 D-77833 OTTERSWEIER Technical support: +49 (0)7223 / 9493 0 Introduction Linux drivers Edition: 01.05 09/2006 Contents Introduction Linux driver
Evaluation of Real-time operating systems for FGC controls
 Evaluation of Real-time operating systems for FGC controls Konstantinos Chalas, CERN, Geneva, Switzerland September 2015 Abstract Power Converter Control for various experiments at CERN, is conducted using
Evaluation of Real-time operating systems for FGC controls Konstantinos Chalas, CERN, Geneva, Switzerland September 2015 Abstract Power Converter Control for various experiments at CERN, is conducted using
Real Time Linux patches: history and usage
 Real Time Linux patches: history and usage Presentation first given at: FOSDEM 2006 Embedded Development Room See www.fosdem.org Klaas van Gend Field Application Engineer for Europe Why Linux in Real-Time
Real Time Linux patches: history and usage Presentation first given at: FOSDEM 2006 Embedded Development Room See www.fosdem.org Klaas van Gend Field Application Engineer for Europe Why Linux in Real-Time
Real-Time Ethernet in Mobile Automation
 Real-Time Ethernet in Mobile Automation Taxer Stefan, B&R Miodrag Veselic, EPSG Increasing demands have pushed the bus systems used in mobile machinery to their limits. As a result, Mobile Machine builders
Real-Time Ethernet in Mobile Automation Taxer Stefan, B&R Miodrag Veselic, EPSG Increasing demands have pushed the bus systems used in mobile machinery to their limits. As a result, Mobile Machine builders
Real-time Performance of Real-time Mechanisms for RTAI and Xenomai in Various Running Conditions
 Real-time Performance of Real-time Mechanisms for RTAI and Xenomai in Various Running Conditions Jae Hwan Koh and Byoung Wook Choi * Dept. of Electrical and Information Engineering Seoul National University
Real-time Performance of Real-time Mechanisms for RTAI and Xenomai in Various Running Conditions Jae Hwan Koh and Byoung Wook Choi * Dept. of Electrical and Information Engineering Seoul National University
Real-Time Ethernet for Automation Applications
 Richard Zurawski/Networked Embedded Systems K10386_C021 Page proof Page 1 2009-1-27 #4 21 Real-Time Ethernet for Automation Applications Max Felser Bern University of Applied Sciences 21.1 Introduction...
Richard Zurawski/Networked Embedded Systems K10386_C021 Page proof Page 1 2009-1-27 #4 21 Real-Time Ethernet for Automation Applications Max Felser Bern University of Applied Sciences 21.1 Introduction...
OpenOnload. Dave Parry VP of Engineering Steve Pope CTO Dave Riddoch Chief Software Architect
 OpenOnload Dave Parry VP of Engineering Steve Pope CTO Dave Riddoch Chief Software Architect Copyright 2012 Solarflare Communications, Inc. All Rights Reserved. OpenOnload Acceleration Software Accelerated
OpenOnload Dave Parry VP of Engineering Steve Pope CTO Dave Riddoch Chief Software Architect Copyright 2012 Solarflare Communications, Inc. All Rights Reserved. OpenOnload Acceleration Software Accelerated
SE300 SWE Practices. Lecture 10 Introduction to Event- Driven Architectures. Tuesday, March 17, Sam Siewert
 SE300 SWE Practices Lecture 10 Introduction to Event- Driven Architectures Tuesday, March 17, 2015 Sam Siewert Copyright {c} 2014 by the McGraw-Hill Companies, Inc. All rights Reserved. Four Common Types
SE300 SWE Practices Lecture 10 Introduction to Event- Driven Architectures Tuesday, March 17, 2015 Sam Siewert Copyright {c} 2014 by the McGraw-Hill Companies, Inc. All rights Reserved. Four Common Types
Asynchronous Traffic Signaling over Master-Slave Switched Ethernet protocols
 Asynchronous Traffic Signaling over Master-Slave Switched Ethernet protocols R. Marau, P. Pedreiras, L. Almeida DETI-IEETA Universidade de Aveiro 3810-193 Aveiro, Portugal {marau,pedreiras,lda}@det.ua.pt
Asynchronous Traffic Signaling over Master-Slave Switched Ethernet protocols R. Marau, P. Pedreiras, L. Almeida DETI-IEETA Universidade de Aveiro 3810-193 Aveiro, Portugal {marau,pedreiras,lda}@det.ua.pt
Real-Time Operating Systems. Ludovic Apvrille Eurecom, office
 Ludovic Apvrille ludovic.apvrille@telecom-paristech.fr Eurecom, office 470 http://soc.eurecom.fr/os/ @OS Eurecom Embedded systems in a nutshell Real-time systems in a nutshell Examples of real-time and
Ludovic Apvrille ludovic.apvrille@telecom-paristech.fr Eurecom, office 470 http://soc.eurecom.fr/os/ @OS Eurecom Embedded systems in a nutshell Real-time systems in a nutshell Examples of real-time and
The control of I/O devices is a major concern for OS designers
 Lecture Overview I/O devices I/O hardware Interrupts Direct memory access Device dimensions Device drivers Kernel I/O subsystem Operating Systems - June 26, 2001 I/O Device Issues The control of I/O devices
Lecture Overview I/O devices I/O hardware Interrupts Direct memory access Device dimensions Device drivers Kernel I/O subsystem Operating Systems - June 26, 2001 I/O Device Issues The control of I/O devices
* There are more than 100 hundred commercial RTOS with memory footprints from few hundred kilobytes to large multiprocessor systems
 Presented material is based on ü Laura Carnevali: Formal Methods in the Development Life Cycle of Realtime Systems. PhD-Thesis, Univ. of Florence (IT) 2010. (Ch. 1.1-1.3) ü Doug Abbott: Linux for Embedded
Presented material is based on ü Laura Carnevali: Formal Methods in the Development Life Cycle of Realtime Systems. PhD-Thesis, Univ. of Florence (IT) 2010. (Ch. 1.1-1.3) ü Doug Abbott: Linux for Embedded
10 th AUTOSAR Open Conference
 10 th AUTOSAR Open Conference Yuchen Zhou, Thomas E Fuhrman, Prathap Venugopal General Motors Scheduling Techniques for Automated Driving Systems using the AUTOSAR Adaptive Platform AUTOSAR Nov-2017 Agenda
10 th AUTOSAR Open Conference Yuchen Zhou, Thomas E Fuhrman, Prathap Venugopal General Motors Scheduling Techniques for Automated Driving Systems using the AUTOSAR Adaptive Platform AUTOSAR Nov-2017 Agenda
System Automation Masters
 System Automation Masters on Industrial Ethernet Net works PowerLink Profinet RT & IRT EtherCAT Mechatrolink III P r o d u c t F e a t u r e s DSPowerLink Ethernet PowerLink Master Motion Controller and
System Automation Masters on Industrial Ethernet Net works PowerLink Profinet RT & IRT EtherCAT Mechatrolink III P r o d u c t F e a t u r e s DSPowerLink Ethernet PowerLink Master Motion Controller and
Embedded Linux system development training 5-day session
 Embedded Linux system development training 5-day session Title Embedded Linux system development training Overview Bootloaders Kernel (cross) compiling and booting Block and flash filesystems C library
Embedded Linux system development training 5-day session Title Embedded Linux system development training Overview Bootloaders Kernel (cross) compiling and booting Block and flash filesystems C library
Preempt-RT Raspberry Linux. VMware Tiejun Chen
 Preempt-RT Raspberry Linux VMware Tiejun Chen The declaration of this development This is my personal exploration. This is not a roadmap or commitment from VMware. Agenda Motivation
Preempt-RT Raspberry Linux VMware Tiejun Chen The declaration of this development This is my personal exploration. This is not a roadmap or commitment from VMware. Agenda Motivation
Implementation of Real-time Network Extension on Embedded Linux
 2009 International Conference on Communication Software and Networks Implementation of Real-time Network Extension on Embedded Linux Yuan Tian 1,2 1. Institute of Optics and Electronics, 2. Graduate University
2009 International Conference on Communication Software and Networks Implementation of Real-time Network Extension on Embedded Linux Yuan Tian 1,2 1. Institute of Optics and Electronics, 2. Graduate University
Implementing Industrial Ethernet Field Device Functionality by Using FPGAs
 Implementing Industrial Ethernet Field Device Functionality by Using FPGAs Executive Summary Industrial Ethernet protocols like PROFINET or EtherCAT are currently taking over the communication role in
Implementing Industrial Ethernet Field Device Functionality by Using FPGAs Executive Summary Industrial Ethernet protocols like PROFINET or EtherCAT are currently taking over the communication role in
What is this? How do UVMs work?
 An introduction to UVMs What is this? UVM support is a unique Xenomai feature, which allows running a nearly complete realtime system embodied into a single multi threaded Linux process in user space,
An introduction to UVMs What is this? UVM support is a unique Xenomai feature, which allows running a nearly complete realtime system embodied into a single multi threaded Linux process in user space,
Supporting Time-sensitive Applications on a Commodity OS
 Supporting Time-sensitive Applications on a Commodity OS Ashvin Goel, Luca Abeni, Charles Krasic, Jim Snow, Jonathan Walpole Department of Computer Science and Engineering Oregon Graduate Institute, Portland
Supporting Time-sensitive Applications on a Commodity OS Ashvin Goel, Luca Abeni, Charles Krasic, Jim Snow, Jonathan Walpole Department of Computer Science and Engineering Oregon Graduate Institute, Portland
System Overview POWERLINK. Basics
 System Overview POWERLINK Basics Why Real-time Industrial Ethernet? Over the course of the last two decades, it has become hard to keep track of the numerous fieldbus systems that have been developed in
System Overview POWERLINK Basics Why Real-time Industrial Ethernet? Over the course of the last two decades, it has become hard to keep track of the numerous fieldbus systems that have been developed in
 Page 1 of 5 Print this Page Close this Window TECHNICAL ARTICLE: STANDARDS-BASED REAL TIME ETHERNET NOW OFF-THE-SHELF Almost every major user organisation is currently propagating its own Ethernet-based
Page 1 of 5 Print this Page Close this Window TECHNICAL ARTICLE: STANDARDS-BASED REAL TIME ETHERNET NOW OFF-THE-SHELF Almost every major user organisation is currently propagating its own Ethernet-based
Real Time Ethernet: standardization and implementations
 Real Time Ethernet: standardization and implementations Max Felser Bern University of Applied Sciences (BFH) Engineering and Information Technology (TI) max.felser@bfh.ch Abstract - The International Electrotechnical
Real Time Ethernet: standardization and implementations Max Felser Bern University of Applied Sciences (BFH) Engineering and Information Technology (TI) max.felser@bfh.ch Abstract - The International Electrotechnical
We need a Linux company : Here is one
 We need a Linux company : Here is one Carsten Emde Open Source Automation Development Lab (OSADL) eg Open Source : Impact on Paradigms (1) #1: You need a different operating system for different systems
We need a Linux company : Here is one Carsten Emde Open Source Automation Development Lab (OSADL) eg Open Source : Impact on Paradigms (1) #1: You need a different operating system for different systems
D1 - Embedded Linux. Building and installing an embedded and real-time Linux platform. Objectives. Course environment.
 Training Embedded Linux: Building and installing an embedded and real-time Linux platform - Operating Systems: Linux D1 - Embedded Linux Building and installing an embedded and real-time Linux platform
Training Embedded Linux: Building and installing an embedded and real-time Linux platform - Operating Systems: Linux D1 - Embedded Linux Building and installing an embedded and real-time Linux platform
Commercial Real-time Operating Systems An Introduction. Swaminathan Sivasubramanian Dependable Computing & Networking Laboratory
 Commercial Real-time Operating Systems An Introduction Swaminathan Sivasubramanian Dependable Computing & Networking Laboratory swamis@iastate.edu Outline Introduction RTOS Issues and functionalities LynxOS
Commercial Real-time Operating Systems An Introduction Swaminathan Sivasubramanian Dependable Computing & Networking Laboratory swamis@iastate.edu Outline Introduction RTOS Issues and functionalities LynxOS
POWERLINK - Use Cases
 POWELINK - Use Cases POWELINK Use Cases in open, POWELINK compatible networks POWELINK with FPGA and Soft-CPU This case is the most common use case, it allows for an excellent POWELINK Performance and
POWELINK - Use Cases POWELINK Use Cases in open, POWELINK compatible networks POWELINK with FPGA and Soft-CPU This case is the most common use case, it allows for an excellent POWELINK Performance and
ecos in commercial use the Sinar emotion Outline
 ecos in commercial use the Sinar emotion Outline Introduction Sinar emotion Overview Operating Systems Application Design ecos Development Environment Roundup Dipl.Ing. Alexander Neundorf
ecos in commercial use the Sinar emotion Outline Introduction Sinar emotion Overview Operating Systems Application Design ecos Development Environment Roundup Dipl.Ing. Alexander Neundorf
Tomasz Włostowski Beams Department Controls Group Hardware and Timing Section. Developing hard real-time systems using FPGAs and soft CPU cores
 Tomasz Włostowski Beams Department Controls Group Hardware and Timing Section Developing hard real-time systems using FPGAs and soft CPU cores Melbourne, 22 October 2015 Outline 2 Hard Real Time control
Tomasz Włostowski Beams Department Controls Group Hardware and Timing Section Developing hard real-time systems using FPGAs and soft CPU cores Melbourne, 22 October 2015 Outline 2 Hard Real Time control
3D Printing with Linux and Xenomai. Kendall Auel, Senior Software Engineer, 3D Systems Corp.
 3D Printing with Linux and Xenomai Kendall Auel, Senior Software Engineer, 3D Systems Corp. Personal Background 36 years developing commercial software 8 years CAD/CAM applications Mechanical CAD/CAM Integrated
3D Printing with Linux and Xenomai Kendall Auel, Senior Software Engineer, 3D Systems Corp. Personal Background 36 years developing commercial software 8 years CAD/CAM applications Mechanical CAD/CAM Integrated
İzmir Institute of Technology Embedded Systems Lab. Real-Time Systems. Asst. Prof. Dr. Tolga Ayav Department of Computer Engineering
 İzmir Institute of Technology Embedded Systems Lab Real-Time Systems Asst. Prof. Dr. Tolga Ayav Department of Computer Engineering Agenda Real-Time Systems RT Scheduling RT Kernels RT-Linux RT Executives
İzmir Institute of Technology Embedded Systems Lab Real-Time Systems Asst. Prof. Dr. Tolga Ayav Department of Computer Engineering Agenda Real-Time Systems RT Scheduling RT Kernels RT-Linux RT Executives
ADI Solution for Industrial Communications
 The World Leader in High Performance Signal Processing Solutions ADI Solution for Industrial Communications Singer Zhang June 2012 General Classifications / Terminology Fieldbus / Serial Fieldbus Generic
The World Leader in High Performance Signal Processing Solutions ADI Solution for Industrial Communications Singer Zhang June 2012 General Classifications / Terminology Fieldbus / Serial Fieldbus Generic
Introducing the AM57x Sitara Processors from Texas Instruments
 Introducing the AM57x Sitara Processors from Texas Instruments ARM Cortex-A15 solutions for automation, HMI, vision, analytics, and other industrial and high-performance applications. Embedded Processing
Introducing the AM57x Sitara Processors from Texas Instruments ARM Cortex-A15 solutions for automation, HMI, vision, analytics, and other industrial and high-performance applications. Embedded Processing
CRANFIELD UNIVERSITY
 CRANFIELD UNIVERSITY TAO CHEN DEVELOPMENT AND SIMULATION OF HARD REAL-TIME SWITCHED-ETHERNET AVIONICS DATA NETWORK SCHOOL OF ENGINEERING MSc by Research Thesis August 2011 Cranfield University School
CRANFIELD UNIVERSITY TAO CHEN DEVELOPMENT AND SIMULATION OF HARD REAL-TIME SWITCHED-ETHERNET AVIONICS DATA NETWORK SCHOOL OF ENGINEERING MSc by Research Thesis August 2011 Cranfield University School
REAL TIME OPERATING SYSTEM PROGRAMMING-I: VxWorks
 REAL TIME OPERATING SYSTEM PROGRAMMING-I: I: µc/os-ii and VxWorks Lesson-1: RTOSes 1 1. Kernel of an RTOS 2 Kernel of an RTOS Used for real-time programming features to meet hard and soft real time constraints,
REAL TIME OPERATING SYSTEM PROGRAMMING-I: I: µc/os-ii and VxWorks Lesson-1: RTOSes 1 1. Kernel of an RTOS 2 Kernel of an RTOS Used for real-time programming features to meet hard and soft real time constraints,
Developing Real-Time Applications
 Developing Real-Time Applications Real Time Operating Systems and Middleware Luca Abeni luca.abeni@unitn.it Characterised by temporal constraints deadlines Concurrent (application: set of real-time tasks)
Developing Real-Time Applications Real Time Operating Systems and Middleware Luca Abeni luca.abeni@unitn.it Characterised by temporal constraints deadlines Concurrent (application: set of real-time tasks)
Ethernet POWERLINK. Performance Examples EPSG. Version (Ethernet POWERLINK Standardisation Group)
") Ethernet POWERLINK Performance Examples Version 1.0.1 Ethernet POWERLINK Performance Examples Version 1.0.1 EPSG (Ethernet POWERLINK Standardisation Group) 2008 Performace Examples V 1.0.1-2- EPSG (Ethernet
Ethernet POWERLINK Performance Examples Version 1.0.1 Ethernet POWERLINK Performance Examples Version 1.0.1 EPSG (Ethernet POWERLINK Standardisation Group) 2008 Performace Examples V 1.0.1-2- EPSG (Ethernet
Real-time EtherCAT Master Implementation on Xenomai for a Robot System
 International Journal of Fuzzy Logic and Intelligent Systems, vol. 9, no. 3, September 2009 pp. 244-248 Real-time EtherCAT Master Implementation on Xenomai for a Robot System Yongseon Moon*, Nak Yong Ko**,
International Journal of Fuzzy Logic and Intelligent Systems, vol. 9, no. 3, September 2009 pp. 244-248 Real-time EtherCAT Master Implementation on Xenomai for a Robot System Yongseon Moon*, Nak Yong Ko**,
2. REAL-TIME CONTROL SYSTEM AND REAL-TIME NETWORKS
 2. REAL-TIME CONTROL SYSTEM AND REAL-TIME NETWORKS 2.1 Real-Time and Control Computer based digital controllers typically have the ability to monitor a number of discrete and analog inputs, perform complex
2. REAL-TIME CONTROL SYSTEM AND REAL-TIME NETWORKS 2.1 Real-Time and Control Computer based digital controllers typically have the ability to monitor a number of discrete and analog inputs, perform complex
Linux in ambito industriale, real-time, hypervisors e boot veloce
 1 Linux in ambito industriale, real-time, hypervisors e boot veloce Paolo Gai, pj@evidence.eu.com Bruno Morelli, bruno@evidence.eu.com Applicazioni industriali e real-time su dispositivi eterogenei multi/many-core
1 Linux in ambito industriale, real-time, hypervisors e boot veloce Paolo Gai, pj@evidence.eu.com Bruno Morelli, bruno@evidence.eu.com Applicazioni industriali e real-time su dispositivi eterogenei multi/many-core
Real-time Support in Operating Systems
 Real-time Support in Operating Systems Colin Perkins teaching/2003-2004/rtes4/lecture11.pdf Lecture Outline Overview of the rest of the module Real-time support in operating systems Overview of concepts
Real-time Support in Operating Systems Colin Perkins teaching/2003-2004/rtes4/lecture11.pdf Lecture Outline Overview of the rest of the module Real-time support in operating systems Overview of concepts
Input/Output Problems. External Devices. Input/Output Module. I/O Steps. I/O Module Function Computer Architecture
 168 420 Computer Architecture Chapter 6 Input/Output Input/Output Problems Wide variety of peripherals Delivering different amounts of data At different speeds In different formats All slower than CPU
168 420 Computer Architecture Chapter 6 Input/Output Input/Output Problems Wide variety of peripherals Delivering different amounts of data At different speeds In different formats All slower than CPU
Is a Generic Interface for Power Drive Systems possible?
 Is a Generic Interface for Power Drive Systems possible? Max Felser Berne University of Applied Sciences School of Engineering and Information Technology Division of Electrical- and Communication Engineering
Is a Generic Interface for Power Drive Systems possible? Max Felser Berne University of Applied Sciences School of Engineering and Information Technology Division of Electrical- and Communication Engineering
Real Time Ethernet Networks Evaluation Using Performance Indicators
 Real Time Ethernet Networks Evaluation Using Performance Indicators L. Seno, S. Vitturi Italian National Council of Research CNR-IEIIT Department of Information Engineering, University of Padova Via Gradenigo
Real Time Ethernet Networks Evaluation Using Performance Indicators L. Seno, S. Vitturi Italian National Council of Research CNR-IEIIT Department of Information Engineering, University of Padova Via Gradenigo
PC BASED REAL TIME DATA EXCHANGE ON 10GbE OPTICAL NETWORK USING RTOS*
 THIC Software and Hardware Technology THCC03 PC BASED REAL TIME DATA EXCHANGE ON 10GbE OPTICAL NETWORK USING RTOS* Ninth International Workshop on Personal Computers and Particle Accelerator Controls (PCaPAC
THIC Software and Hardware Technology THCC03 PC BASED REAL TIME DATA EXCHANGE ON 10GbE OPTICAL NETWORK USING RTOS* Ninth International Workshop on Personal Computers and Particle Accelerator Controls (PCaPAC
Application C/C++ Master Core. Class A or Class B. Windows (32/64 Bit) Linux (32/64 Bit) Windows CE/EC. OnTime RTOS-32
 Linux (32/64 Bit) Windows CE/EC. OnTime RTOS-32") 1 Overview End users and/ or System integrators expect a defined minimum functionality and interoperability when selecting an EtherCAT Master device. The ETG (EtherCAT Technology Group) has defined EtherCAT
1 Overview End users and/ or System integrators expect a defined minimum functionality and interoperability when selecting an EtherCAT Master device. The ETG (EtherCAT Technology Group) has defined EtherCAT
Leverage Vybrid's asymmetrical multicore architecture for real-time applications by Stefan Agner
 Leverage Vybrid's asymmetrical multicore architecture for real-time applications 2014 by Stefan Agner Vybrid Family of ARM processors suitable for embedded devices VF3XX Single core no DDR VF5XX Single
Leverage Vybrid's asymmetrical multicore architecture for real-time applications 2014 by Stefan Agner Vybrid Family of ARM processors suitable for embedded devices VF3XX Single core no DDR VF5XX Single
Department of Computer Science. Real-Time Systems Group. Seminar Paper. A Quantitative Comparison of Realtime Linux Solutions.
 Department of Computer Science Real-Time Systems Group Seminar Paper A Quantitative Comparison of Realtime Linux Solutions Markus Franke Chemnitz, March 5, 2007 supervisor: Dr. Robert Baumgartl Contents
Department of Computer Science Real-Time Systems Group Seminar Paper A Quantitative Comparison of Realtime Linux Solutions Markus Franke Chemnitz, March 5, 2007 supervisor: Dr. Robert Baumgartl Contents
Deflating the hype: Embedded Virtualization in 3 steps
 Deflating the hype: Embedded Virtualization in 3 steps Klaas van Gend MontaVista Software LLC For Embedded Linux Conference Europe 2010, Cambridge Agenda Why multicore made the topic more relevant Partitioning
Deflating the hype: Embedded Virtualization in 3 steps Klaas van Gend MontaVista Software LLC For Embedded Linux Conference Europe 2010, Cambridge Agenda Why multicore made the topic more relevant Partitioning
Chapter 13: I/O Systems
 COP 4610: Introduction to Operating Systems (Spring 2015) Chapter 13: I/O Systems Zhi Wang Florida State University Content I/O hardware Application I/O interface Kernel I/O subsystem I/O performance Objectives
COP 4610: Introduction to Operating Systems (Spring 2015) Chapter 13: I/O Systems Zhi Wang Florida State University Content I/O hardware Application I/O interface Kernel I/O subsystem I/O performance Objectives
2013 Toshiba Corporation
 2013 Toshiba Corporation Who am I? Yoshitake Kobayashi (YOSHI) Chief Specialist at Corporate Software Engineering Center, TOSHIBA CORPORATION Work on embedded operating systems Linux RTOS TOPPERS (uitron),
2013 Toshiba Corporation Who am I? Yoshitake Kobayashi (YOSHI) Chief Specialist at Corporate Software Engineering Center, TOSHIBA CORPORATION Work on embedded operating systems Linux RTOS TOPPERS (uitron),
Software Design Challenges for heterogenic SOC's
 Software Design Challenges for heterogenic SOC's René Janssen, Product manager Logic Technology 1 Agenda 1. Advantages of heterogenous devices 2. How to manage inter-processor communication 3. Example
Software Design Challenges for heterogenic SOC's René Janssen, Product manager Logic Technology 1 Agenda 1. Advantages of heterogenous devices 2. How to manage inter-processor communication 3. Example
RT-MaG: an open-source SIMULINK Toolbox for Linux-Based Real-Time Robotic Applications
 : an open-source SIMULINK Toolbox for Linux-Based Real-Time Robotic Applications Manecy Augustin 1,2 Marchand Nicolas 2 Viollet Stéphane 1 1 Biorobotic Department, Aix-Marseille Université/CNRS, Marseille,
: an open-source SIMULINK Toolbox for Linux-Based Real-Time Robotic Applications Manecy Augustin 1,2 Marchand Nicolas 2 Viollet Stéphane 1 1 Biorobotic Department, Aix-Marseille Université/CNRS, Marseille,
Real-time Test Framework for Industrial Control Systems. REAL-TIME
 REAL-TIME Test Framework for Industrial Control Systems. Test the real-time performance of your Industrial Control Systems during the different phases of your development. 2 3 Real-time systems Real-time
REAL-TIME Test Framework for Industrial Control Systems. Test the real-time performance of your Industrial Control Systems during the different phases of your development. 2 3 Real-time systems Real-time
POWERLINK Slave Xilinx Getting Started User's Manual
 POWERLINK Slave Xilinx Getting Started Version 0.01 (April 2012) Model No: PLALTGETST-ENG We reserve the right to change the content of this manual without prior notice. The information contained herein
POWERLINK Slave Xilinx Getting Started Version 0.01 (April 2012) Model No: PLALTGETST-ENG We reserve the right to change the content of this manual without prior notice. The information contained herein
LINUX INTERNALS & NETWORKING Weekend Workshop
 Here to take you beyond LINUX INTERNALS & NETWORKING Weekend Workshop Linux Internals & Networking Weekend workshop Objectives: To get you started with writing system programs in Linux Build deeper view
Here to take you beyond LINUX INTERNALS & NETWORKING Weekend Workshop Linux Internals & Networking Weekend workshop Objectives: To get you started with writing system programs in Linux Build deeper view
A Comparison of Scheduling Latency in Linux, PREEMPT_RT, and LITMUS RT. Felipe Cerqueira and Björn Brandenburg
 A Comparison of Scheduling Latency in Linux, PREEMPT_RT, and LITMUS RT Felipe Cerqueira and Björn Brandenburg July 9th, 2013 1 Linux as a Real-Time OS 2 Linux as a Real-Time OS Optimizing system responsiveness
A Comparison of Scheduling Latency in Linux, PREEMPT_RT, and LITMUS RT Felipe Cerqueira and Björn Brandenburg July 9th, 2013 1 Linux as a Real-Time OS 2 Linux as a Real-Time OS Optimizing system responsiveness
How to add Industrial Ethernet to Computer Numeric Control (CNC) Router Machine
 Router Machine") How to add Industrial Ethernet to Computer Numeric Control (CNC) Router Machine 4-axis CNC Router Machine with 250KHz control loop through Industrial Ethernet Thomas Mauer Industrial Systems Team, Factory
How to add Industrial Ethernet to Computer Numeric Control (CNC) Router Machine 4-axis CNC Router Machine with 250KHz control loop through Industrial Ethernet Thomas Mauer Industrial Systems Team, Factory
Multi-Axis Position Control by EtherCAT Real-time Networking
 Multi-Axis Position Control by EtherCAT Real-time Networking Lecture Topics EtherCAT Applications Overview The EtherCAT Control Approach The EtherCAT Data Processing Time Synchronization Requirements in
Multi-Axis Position Control by EtherCAT Real-time Networking Lecture Topics EtherCAT Applications Overview The EtherCAT Control Approach The EtherCAT Data Processing Time Synchronization Requirements in
Chapter 13: I/O Systems
 Chapter 13: I/O Systems I/O Hardware Application I/O Interface Kernel I/O Subsystem Transforming I/O Requests to Hardware Operations Streams Performance Objectives Explore the structure of an operating
Chapter 13: I/O Systems I/O Hardware Application I/O Interface Kernel I/O Subsystem Transforming I/O Requests to Hardware Operations Streams Performance Objectives Explore the structure of an operating
Free Electrons Company profile Kernel, drivers, embedded Linux and Android development, consulting, training and support
 Free Electrons Company profile http://free-electrons.com Mission Support companies using embedded Linux in their projects. Promote embedded Linux. Training courses Engineering expertise for development
Free Electrons Company profile http://free-electrons.com Mission Support companies using embedded Linux in their projects. Promote embedded Linux. Training courses Engineering expertise for development
Life with Adeos. Philippe Gerum. Revision B Copyright 2005
 Copyright 2005 Philippe Gerum Life with Adeos Philippe Gerum Revision B Copyright 2005 Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation
Copyright 2005 Philippe Gerum Life with Adeos Philippe Gerum Revision B Copyright 2005 Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation
Inferring Temporal Behaviours Through Kernel Tracing
 Inferring Temporal Behaviours Through Kernel Tracing Paolo Rallo, Nicola Manica, Luca Abeni University of Trento Trento - Italy prallo@gmail.com, nicola.manica@disi.unitn.it, luca.abeni@unitn.it Technical
Inferring Temporal Behaviours Through Kernel Tracing Paolo Rallo, Nicola Manica, Luca Abeni University of Trento Trento - Italy prallo@gmail.com, nicola.manica@disi.unitn.it, luca.abeni@unitn.it Technical
Technology for Adaptive Hard. Rui Santos, UA
 HaRTES Meeting Enhanced Ethernet Switching Technology for Adaptive Hard Real-Time Applications Rui Santos, rsantos@ua.pt, UA SUMMARY 2 MOTIVATION Switched Ethernet t became common in real-time communications
HaRTES Meeting Enhanced Ethernet Switching Technology for Adaptive Hard Real-Time Applications Rui Santos, rsantos@ua.pt, UA SUMMARY 2 MOTIVATION Switched Ethernet t became common in real-time communications
Chapter 13: I/O Systems
 Chapter 13: I/O Systems I/O Hardware Application I/O Interface Kernel I/O Subsystem Transforming I/O Requests to Hardware Operations Streams Performance I/O Hardware Incredible variety of I/O devices Common
Chapter 13: I/O Systems I/O Hardware Application I/O Interface Kernel I/O Subsystem Transforming I/O Requests to Hardware Operations Streams Performance I/O Hardware Incredible variety of I/O devices Common
E Copyright VARAN BUS USER ORGANIZATION 06/2015. Real Time Ethernet VARAN Bus
 8100000100-E Copyright BUS USER ORGANIZATION 06/2015 Real Time Ethernet Bus - Versatile Automation Random Access Network The bus system meets all requirements of a modern industry network optimized for
8100000100-E Copyright BUS USER ORGANIZATION 06/2015 Real Time Ethernet Bus - Versatile Automation Random Access Network The bus system meets all requirements of a modern industry network optimized for
Testing real-time Linux: What to test and how.
 Testing real-time Linux: What to test and how. Sripathi Kodi sripathik@in.ibm.com Agenda IBM Linux Technology Center What is a real-time Operating System? Enterprise real-time Real-Time patches for Linux
Testing real-time Linux: What to test and how. Sripathi Kodi sripathik@in.ibm.com Agenda IBM Linux Technology Center What is a real-time Operating System? Enterprise real-time Real-Time patches for Linux
Bye bye protocol stacks
 Embedded Networking Solutions Bye bye protocol stacks Outsourcing Embedded Industrial Networking Kurt van Buul Twincomm About Twincomm Embedded Networking Solutions Our products and services enable embedded
Embedded Networking Solutions Bye bye protocol stacks Outsourcing Embedded Industrial Networking Kurt van Buul Twincomm About Twincomm Embedded Networking Solutions Our products and services enable embedded
A Hardware Time Manager Implementation for the Xenomai Real-Time Kernel of Embedded Linux
 A Hardware Time Manager Implementation for the Xenomai Real-Time Kernel of Embedded Linux tegrated into many embedded devices. Using an RTOS provides many benefits. First, by abstracting the hardware layer,
A Hardware Time Manager Implementation for the Xenomai Real-Time Kernel of Embedded Linux tegrated into many embedded devices. Using an RTOS provides many benefits. First, by abstracting the hardware layer,
Platinum Maestro Multi Axis Control. The Ultimate Machine Motion Controller
 Platinum Maestro Multi Axis Control The Ultimate Machine Motion Controller Platinum Maestro TRUE MACHINE MOTION CONTROL SMART & SIMPLE MOTION IMPLEMENTATION BEST IN CLASS MULTI AXIS CONTROL / Advanced
Platinum Maestro Multi Axis Control The Ultimate Machine Motion Controller Platinum Maestro TRUE MACHINE MOTION CONTROL SMART & SIMPLE MOTION IMPLEMENTATION BEST IN CLASS MULTI AXIS CONTROL / Advanced
CHAPTER 3 LabVIEW REAL TIME APPLICATION DEVELOPMENT REFERENCES: [1] NI, Real Time LabVIEW. [2] R. Bishop, LabVIEW 2009.
![CHAPTER 3 LabVIEW REAL TIME APPLICATION DEVELOPMENT REFERENCES: [1] NI, Real Time LabVIEW. [2] R. Bishop, LabVIEW 2009.](/thumbs/84/89380099.jpg "CHAPTER 3 LabVIEW REAL TIME APPLICATION DEVELOPMENT REFERENCES: [1] NI, Real Time LabVIEW. [2] R. Bishop, LabVIEW 2009.") CHAPTER 3 By Radu Muresan University of Guelph Page 1 ENGG4420 CHAPTER 3 LECTURE 1 October 31 10 5:12 PM CHAPTER 3 LabVIEW REAL TIME APPLICATION DEVELOPMENT REFERENCES: [1] NI, Real Time LabVIEW. [2] R.
CHAPTER 3 By Radu Muresan University of Guelph Page 1 ENGG4420 CHAPTER 3 LECTURE 1 October 31 10 5:12 PM CHAPTER 3 LabVIEW REAL TIME APPLICATION DEVELOPMENT REFERENCES: [1] NI, Real Time LabVIEW. [2] R.
Introduction to Sitara AM437x Processors
 Introduction to Sitara AM437x Processors AM437x: Highly integrated, scalable platform with enhanced industrial communications and security AM4376 AM4378 Software Key Features AM4372 AM4377 High-performance
Introduction to Sitara AM437x Processors AM437x: Highly integrated, scalable platform with enhanced industrial communications and security AM4376 AM4378 Software Key Features AM4372 AM4377 High-performance
PowerQUICC Processors Simplify Deterministic Industrial Networks
 PowerQUICC Processors Simplify Deterministic Industrial Networks Overview The Internet has changed the way we live, communicate and run our businesses. This enhanced connectivity is revolutionizing how
PowerQUICC Processors Simplify Deterministic Industrial Networks Overview The Internet has changed the way we live, communicate and run our businesses. This enhanced connectivity is revolutionizing how