Development of Real-Time Systems with Embedded Linux. Brandon Shibley Senior Solutions Architect Toradex Inc.
|
|
|
- Arron Wilcox
- 6 years ago
- Views:
Transcription

1 Development of Real-Time Systems with Embedded Linux Brandon Shibley Senior Solutions Architect Toradex Inc.




2 Overview Toradex ARM-based System-on-Modules Pin-Compatible SoM Families In-house HW and SW Development 10+ Year Product Life Cycle Free Engineering Support Direct Sales Global Reach with Local Offices 2
3 Introduction to Real-Time Overview of Solutions Real-Time Linux Xenomai Heterogenous Multicore Conclusion Q & A


4 Real-Time Requirements Firmness of Real-Time Requirements Hard: Missed deadline results in system failure Soft: Missed deadline reduces system effectiveness Examples Periodic Deadline is periodic Often streaming/buffer related, must avoid buffer overflow/underflow Event Driven Event triggered, may have event-specific deadline Often spontaneous Control Both measurement & response deadlines Often periodic with feedback or other input 4



5 The Problem / Opportunity 5
6 Real-time Terms & Concepts Latency The system s response time from the moment of stimulus Jitter The variability of timing & latency Interrupt An event trigger which can interrupt the system Context Switch The switching of processor control from one thread/process to another Preemption The act of context switching a thread/process off of the processor to allow processing a higher priority task 6

7 Real-Time Operating System Concerns Determinism Predictable Scheduler Bounded latencies Minimal jitter Prioritization Priority-base scheduling of tasks & interrupt requests Preemption Preempt tasks for higher priority tasks Priority inheritance 7

8 Real-Time Operating System Concerns Priority Inversion Source: 8


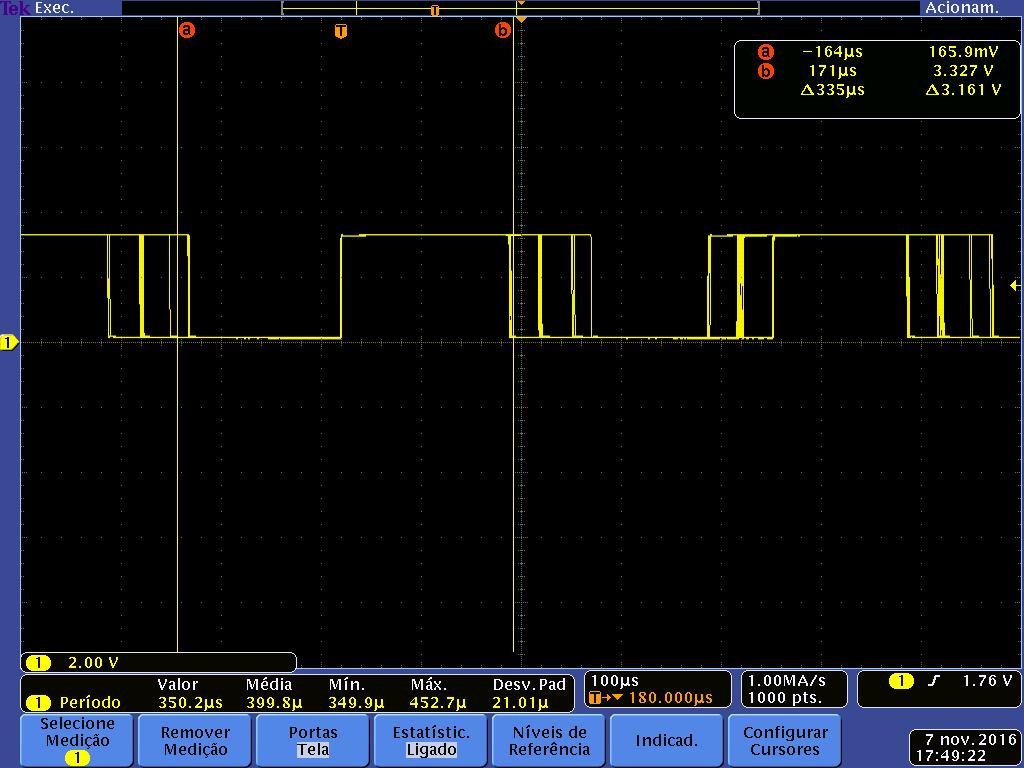
9 Real-Time Evaluation Test Periodic Real-Time Task Toggle memory mapped GPIO every 200µs Stress processor, bus & interrupt controller Measure time between rising/falling edges Metrics: Jitter/Latency Jitter 400 µs 9



10 Colibri VF50 Colibri VF61 IT Colibri imx7s Colibri imx7d Colibri imx6s Colibri imx6dl GPU Vivante GC880 GPU Vivante GC880 RAM: 128MB RAM: 256MB RAM: 256MB RAM: 512MB RAM: 256MB RAM: 512MB FLASH: 128MB FLASH: 512MB FLASH: 512MB FLASH: 512MB emmc: 4GB emmc: 4GB US 1 US 1k US 1 US 1k US 1 US 1k US 1 US 1k US 1 US 1k 10 US 1 US 1k
")
![CONFIG_PREEMPT_VOLUNTARY: Voluntary Kernel Preemption (Desktop) [DEFAULT] CONFIG_PREEMPT: Preemptible Kernel](/docs-images/72/67531065/images/11-4.jpg "(Low-Latency Desktop) Test Configuration 3.14.")
11 Standard Linux Standard Linux Kernel Priority-based scheduling with preemption Recent kernels support threadable IRQs & IRQ priority setting Standard Preemption Levels: CONFIG_PREEMPT_NONE: No Forced Preemption (Server) CONFIG_PREEMPT_VOLUNTARY: Voluntary Kernel Preemption (Desktop) [DEFAULT] CONFIG_PREEMPT: Preemptible Kernel (Low-Latency Desktop) Test Configuration kernel on Colibri imx6 colibri_imx6_defconfig CONFIG_PREEMPT_VOLUNTARY=y 11
12 Worst Case: Quantity of samples Worst Case: Standard Linux Samples Histogram 6% of samples 92% of samples 2% of samples Error (ms) 2µs bin size 12
13 Real-Time Linux Solutions Real-Time Linux Kernel Make the Linux kernel more Real-Time More Preemptable PREEMPT_RT Real-Time Co-Kernel Assign real-time tasks to higher priority co-kernel Xenomai Real-Time Co-Processor Assign real-time tasks to dedicated processor core NXP i.mx7 - Heterogenous Multicore Processing 13
14 PREEMPT_RT Linux Real-Time Linux Kernel PREEMPT_RT patch Minimizes the amount of kernel code that is nonpreemptable Sleeping spinlocks rt_mutex Threaded interrupt handler PREEMPT_RT_FULL: Fully Preemptible Kernel (RT) Real-time Linux Project at The Linux Foundation: PREEMPT_RT patch source: 14

15 PREEMPT_RT Linux Real-Time Linux Kernel Toradex Real-Time imx6 kernel recipe: Real-Time Linux article at Toradex Developer site: Codesys Software PLC 15
16 PREEMPT_RT Linux Real-Time Linux Kernel Cyclictest Tests for Apalis imx6 with kernel CONFIG_PREEMPT_VOLUNTARY CONFIG_PREEMPT CONFIG_PREEMPT_RT_FULL # cyclictest -n -p 80 -t -D30m policy: fifo: loadavg: / T: 0 ( 1845) P:80 I:1000 C: Min: 10 Act: 19 Avg: 44 Max: T: 1 ( 1846) P:80 I:1500 C: Min: 10 Act: 35 Avg: 37 Max: T: 2 ( 1847) P:80 I:2000 C: Min: 10 Act: 35 Avg: 41 Max: T: 3 ( 1848) P:80 I:2500 C: Min: 11 Act: 38 Avg: 46 Max: # cyclictest -n -p 80 -t -D30m policy: fifo: loadavg: / T: 0 ( 2133) P:80 I:1000 C: Min: 11 Act: 29 Avg: 35 Max: 821 T: 1 ( 2134) P:80 I:1500 C: Min: 11 Act: 35 Avg: 40 Max: 597 T: 2 ( 2135) P:80 I:2000 C: Min: 12 Act: 37 Avg: 44 Max: 886 T: 3 ( 2136) P:80 I:2500 C: Min: 12 Act: 60 Avg: 42 Max: 721 # cyclictest -n -p 80 -t -D30m policy: fifo: loadavg: / T: 0 (12907) P:80 I:1000 C: Min: 10 Act: 24 Avg: 26 Max: 166 T: 1 (12908) P:80 I:1500 C: Min: 9 Act: 27 Avg: 27 Max: 187 T: 2 (12909) P:80 I:2000 C: Min: 11 Act: 21 Avg: 25 Max: 135 T: 3 (12910) P:80 I:2500 C: Min: 10 Act: 30 Avg: 28 Max:
17
18 Quantity of samples Worst Case: Worst Case: PREEMPT_RT Linux Samples Histogram % of samples 0.002% of samples Error (ms) 2µs bin size


19 Xenomai Xenomai Supplements Linux with a real-time co-kernel (Cobalt) Built into Linux kernel Linux runs as a low priority task within Linux Userspace real-time API Also a native Linux implementation of real-time framework (Mercury) May utilize PREEMPT_RT Toradex doesn t currently provide a Xenomai build for download 19

20 Xenomai Xenomai Source: Siemens AG 2015, et al. Creative Commons BY-SA 3.0 license 20
21 Xenomai Xenomai API
22 22
23 Quantity of samples Worst Case: Worst Case: Xenomai Samples Histogram 100% of samples Error (ms) 2µs bin size


24 i.mx7 HMP NXP i.mx7 - Heterogenous Multicore Processing i.mx 7 implements a Heterogeneous Asymmetric Multi- Processing Architecture Two independent CPU cores on a single chip: 2x ARM 1GHz 1x ARM 200MHz Shared Bus Topology Linux on Cortex-A7 FreeRTOS on Cortex-M4 24

25 i.mx7 HMP NXP i.mx7 HMP Architecture 25
 Modified version of OpenAMP Drivers: ADC, GPIO, I2C, UART, WDOG, ECSPI, FlexCAN Some Mainline Support (starting with 4.")
26 i.mx7 HMP NXP i.mx7 Software Linux Kernel Linux Rpmsg VirtIO-based TTY driver FreeRTOS FreeRTOS v8.0.0 kernel Various build systems supported (DS-5, CMake + gcc, IAR) Modified version of OpenAMP Drivers: ADC, GPIO, I2C, UART, WDOG, ECSPI, FlexCAN Some Mainline Support (starting with 4.4) Toradex Developer Website article: 26
27 27
28 Worst Case: Quantity of samples i.mx7 HMP Samples Histogram 100% of samples (< 0.25% of period) 100% of samples Error (ms) 2µs bin size 28 12/15/2016



29 i.mx7 HMP TAQ Balancing Robot 29
30 Conclusion Multiple Linux-based solutions with a range of real-time capability Standard Linux Real-Time Linux Xenomai Heterogenous Multicore All solutions have optimization potential All solutions require careful design beyond the OS selection Requirements, Hardware, Drivers, Application 30


31
i.mx 7 - Hetereogenous Multiprocessing Architecture
 i.mx 7 - Hetereogenous Multiprocessing Architecture Overview Toradex Innovative Business Model Independent Companies Direct Sales Publicly disclosed Sales Prices Local Warehouses In-house HW and SW Development
i.mx 7 - Hetereogenous Multiprocessing Architecture Overview Toradex Innovative Business Model Independent Companies Direct Sales Publicly disclosed Sales Prices Local Warehouses In-house HW and SW Development
How Linux RT_PREEMPT Works
 How Linux RT_PREEMPT Works A common observation about real time systems is that the cost of the increased determinism of real time is decreased throughput and increased average latency. This presentation
How Linux RT_PREEMPT Works A common observation about real time systems is that the cost of the increased determinism of real time is decreased throughput and increased average latency. This presentation
Evaluation of Real-time Performance in Embedded Linux. Hiraku Toyooka, Hitachi. LinuxCon Europe Hitachi, Ltd All rights reserved.
 Evaluation of Real-time Performance in Embedded Linux LinuxCon Europe 2014 Hiraku Toyooka, Hitachi 1 whoami Hiraku Toyooka Software engineer at Hitachi " Working on operating systems Linux (mainly) for
Evaluation of Real-time Performance in Embedded Linux LinuxCon Europe 2014 Hiraku Toyooka, Hitachi 1 whoami Hiraku Toyooka Software engineer at Hitachi " Working on operating systems Linux (mainly) for
Software Design Challenges for heterogenic SOC's
 Software Design Challenges for heterogenic SOC's René Janssen, Product manager Logic Technology 1 Agenda 1. Advantages of heterogenous devices 2. How to manage inter-processor communication 3. Example
Software Design Challenges for heterogenic SOC's René Janssen, Product manager Logic Technology 1 Agenda 1. Advantages of heterogenous devices 2. How to manage inter-processor communication 3. Example
Measuring the impacts of the Preempt-RT patch
 Measuring the impacts of the Preempt-RT patch maxime.chevallier@smile.fr October 25, 2017 RT Linux projects Simulation platform : bi-xeon, lots ot RAM 200µs wakeup latency, networking Test bench : Intel
Measuring the impacts of the Preempt-RT patch maxime.chevallier@smile.fr October 25, 2017 RT Linux projects Simulation platform : bi-xeon, lots ot RAM 200µs wakeup latency, networking Test bench : Intel
Preempt-RT Raspberry Linux. VMware Tiejun Chen
 Preempt-RT Raspberry Linux VMware Tiejun Chen The declaration of this development This is my personal exploration. This is not a roadmap or commitment from VMware. Agenda Motivation
Preempt-RT Raspberry Linux VMware Tiejun Chen The declaration of this development This is my personal exploration. This is not a roadmap or commitment from VMware. Agenda Motivation
Evaluation of Real-time operating systems for FGC controls
 Evaluation of Real-time operating systems for FGC controls Konstantinos Chalas, CERN, Geneva, Switzerland September 2015 Abstract Power Converter Control for various experiments at CERN, is conducted using
Evaluation of Real-time operating systems for FGC controls Konstantinos Chalas, CERN, Geneva, Switzerland September 2015 Abstract Power Converter Control for various experiments at CERN, is conducted using
Understanding Real Time Linux. Alex Shi
 Understanding Real Time Linux Alex Shi Agenda What s real time OS RTL project status RT testing and tracing Reasons of latency and solutions for them Resources Summary What s real time OS Real time and
Understanding Real Time Linux Alex Shi Agenda What s real time OS RTL project status RT testing and tracing Reasons of latency and solutions for them Resources Summary What s real time OS Real time and
Evaluation of uclinux and PREEMPT_RT for Machine Control System
 Evaluation of uclinux and PREEMPT_RT for Machine Control System 2014/05/20 Hitachi, Ltd. Yokohama Research Lab Linux Technology Center Yoshihiro Hayashi yoshihiro.hayashi.cd@hitachi.com Agenda 1. Background
Evaluation of uclinux and PREEMPT_RT for Machine Control System 2014/05/20 Hitachi, Ltd. Yokohama Research Lab Linux Technology Center Yoshihiro Hayashi yoshihiro.hayashi.cd@hitachi.com Agenda 1. Background
Realtime BoF Session RealTime Testing Best Practice of RealTime WG YungJoon Jung
 Realtime BoF Session RealTime Testing Best Practice of RealTime WG YungJoon Jung April 15th, 2008 CE Linux Forum 1 Contents Introduction Current RealTime Testing Methods Plan April 15th, 2008 CE Linux
Realtime BoF Session RealTime Testing Best Practice of RealTime WG YungJoon Jung April 15th, 2008 CE Linux Forum 1 Contents Introduction Current RealTime Testing Methods Plan April 15th, 2008 CE Linux
Performance Evaluation of Xenomai 3
 Performance Evaluation of Xenomai 3 Ching-Chun (Jim) Huang **, Chan-Hsiang Lin **, and Che-Kang Wu * * Department of Computer Science and Information Engineering, National Cheng Kung University, Taiwan
Performance Evaluation of Xenomai 3 Ching-Chun (Jim) Huang **, Chan-Hsiang Lin **, and Che-Kang Wu * * Department of Computer Science and Information Engineering, National Cheng Kung University, Taiwan
RT-MaG: an open-source SIMULINK Toolbox for Linux-Based Real-Time Robotic Applications
 : an open-source SIMULINK Toolbox for Linux-Based Real-Time Robotic Applications Manecy Augustin 1,2 Marchand Nicolas 2 Viollet Stéphane 1 1 Biorobotic Department, Aix-Marseille Université/CNRS, Marseille,
: an open-source SIMULINK Toolbox for Linux-Based Real-Time Robotic Applications Manecy Augustin 1,2 Marchand Nicolas 2 Viollet Stéphane 1 1 Biorobotic Department, Aix-Marseille Université/CNRS, Marseille,
Supporting Time-sensitive Applications on a Commodity OS
 Supporting Time-sensitive Applications on a Commodity OS Ashvin Goel, Luca Abeni, Charles Krasic, Jim Snow, Jonathan Walpole Department of Computer Science and Engineering Oregon Graduate Institute, Portland
Supporting Time-sensitive Applications on a Commodity OS Ashvin Goel, Luca Abeni, Charles Krasic, Jim Snow, Jonathan Walpole Department of Computer Science and Engineering Oregon Graduate Institute, Portland
An Introduction to Asymmetric Multiprocessing: when this architecture can be a game changer and how to survive it.
 An Introduction to Asymmetric Multiprocessing: when this architecture can be a game changer and how to survive it. Nicola La Gloria, Laura Nao Kynetics LLC Santa Clara, California Hybrid Architecture:
An Introduction to Asymmetric Multiprocessing: when this architecture can be a game changer and how to survive it. Nicola La Gloria, Laura Nao Kynetics LLC Santa Clara, California Hybrid Architecture:
Real Time Linux patches: history and usage
 Real Time Linux patches: history and usage Presentation first given at: FOSDEM 2006 Embedded Development Room See www.fosdem.org Klaas van Gend Field Application Engineer for Europe Why Linux in Real-Time
Real Time Linux patches: history and usage Presentation first given at: FOSDEM 2006 Embedded Development Room See www.fosdem.org Klaas van Gend Field Application Engineer for Europe Why Linux in Real-Time
A Comparison of Scheduling Latency in Linux, PREEMPT_RT, and LITMUS RT. Felipe Cerqueira and Björn Brandenburg
 A Comparison of Scheduling Latency in Linux, PREEMPT_RT, and LITMUS RT Felipe Cerqueira and Björn Brandenburg July 9th, 2013 1 Linux as a Real-Time OS 2 Linux as a Real-Time OS Optimizing system responsiveness
A Comparison of Scheduling Latency in Linux, PREEMPT_RT, and LITMUS RT Felipe Cerqueira and Björn Brandenburg July 9th, 2013 1 Linux as a Real-Time OS 2 Linux as a Real-Time OS Optimizing system responsiveness
Benchmark and comparison of real-time solutions based on embedded Linux
 Benchmark and comparison of real-time solutions based on embedded Linux Peter Feuerer August 8, 2007 Table of contents General Motivation Real-time computing Preparations Environment setup Open Realtime
Benchmark and comparison of real-time solutions based on embedded Linux Peter Feuerer August 8, 2007 Table of contents General Motivation Real-time computing Preparations Environment setup Open Realtime
Leverage Vybrid's asymmetrical multicore architecture for real-time applications by Stefan Agner
 Leverage Vybrid's asymmetrical multicore architecture for real-time applications 2014 by Stefan Agner Vybrid Family of ARM processors suitable for embedded devices VF3XX Single core no DDR VF5XX Single
Leverage Vybrid's asymmetrical multicore architecture for real-time applications 2014 by Stefan Agner Vybrid Family of ARM processors suitable for embedded devices VF3XX Single core no DDR VF5XX Single
Interrupt response times on Arduino and Raspberry Pi. Tomaž Šolc
 Interrupt response times on Arduino and Raspberry Pi Tomaž Šolc tomaz.solc@ijs.si Introduction Full-featured Linux-based systems are replacing microcontrollers in some embedded applications for low volumes,
Interrupt response times on Arduino and Raspberry Pi Tomaž Šolc tomaz.solc@ijs.si Introduction Full-featured Linux-based systems are replacing microcontrollers in some embedded applications for low volumes,
. SMARC 2.0 Compliant
 MSC SM2S-IMX8 NXP i.mx8 ARM Cortex -A72/A53 Description The new MSC SM2S-IMX8 module offers a quantum leap in terms of computing and graphics performance. It integrates the currently most powerful i.mx8
MSC SM2S-IMX8 NXP i.mx8 ARM Cortex -A72/A53 Description The new MSC SM2S-IMX8 module offers a quantum leap in terms of computing and graphics performance. It integrates the currently most powerful i.mx8
Real-Timeness and System Integrity on a Asymmetric Multi Processing configuration
 Real-Timeness and System Integrity on a Asymmetric Multi Processing configuration D&E Event November 2nd Relator: Manuele Papais Sales & Marketing Manager 1 DAVE Embedded Systems DAVE Embedded Systems'
Real-Timeness and System Integrity on a Asymmetric Multi Processing configuration D&E Event November 2nd Relator: Manuele Papais Sales & Marketing Manager 1 DAVE Embedded Systems DAVE Embedded Systems'
Apalis A New Architecture for Embedded Computing
 Apalis A New Architecture for Embedded Computing Agenda The Hardware Abstraction Pyramid The System-on-Module (SoM) Why Should You Use a SoM? Discovering Apalis Motivations Architectural Overview Standard
Apalis A New Architecture for Embedded Computing Agenda The Hardware Abstraction Pyramid The System-on-Module (SoM) Why Should You Use a SoM? Discovering Apalis Motivations Architectural Overview Standard
Reservation-Based Scheduling for IRQ Threads
 Reservation-Based Scheduling for IRQ Threads Luca Abeni, Nicola Manica, Luigi Palopoli luca.abeni@unitn.it, nicola.manica@gmail.com, palopoli@dit.unitn.it University of Trento, Trento - Italy Reservation-Based
Reservation-Based Scheduling for IRQ Threads Luca Abeni, Nicola Manica, Luigi Palopoli luca.abeni@unitn.it, nicola.manica@gmail.com, palopoli@dit.unitn.it University of Trento, Trento - Italy Reservation-Based
ADVANCED trouble-shooting of real-time systems. Bernd Hufmann, Ericsson
 ADVANCED trouble-shooting of real-time systems Bernd Hufmann, Ericsson AGENDA 1 Introduction 2 3 Timing Analysis 4 References 5 Q&A Trace Compass Overview ADVANCED trouble-shooting of critical real-time
ADVANCED trouble-shooting of real-time systems Bernd Hufmann, Ericsson AGENDA 1 Introduction 2 3 Timing Analysis 4 References 5 Q&A Trace Compass Overview ADVANCED trouble-shooting of critical real-time
Chapter 6: CPU Scheduling. Operating System Concepts 9 th Edition
 Chapter 6: CPU Scheduling Silberschatz, Galvin and Gagne 2013 Chapter 6: CPU Scheduling Basic Concepts Scheduling Criteria Scheduling Algorithms Thread Scheduling Multiple-Processor Scheduling Real-Time
Chapter 6: CPU Scheduling Silberschatz, Galvin and Gagne 2013 Chapter 6: CPU Scheduling Basic Concepts Scheduling Criteria Scheduling Algorithms Thread Scheduling Multiple-Processor Scheduling Real-Time
Abstract. Testing Parameters. Introduction. Hardware Platform. Native System
 Abstract In this paper, we address the latency issue in RT- XEN virtual machines that are available in Xen 4.5. Despite the advantages of applying virtualization to systems, the default credit scheduler
Abstract In this paper, we address the latency issue in RT- XEN virtual machines that are available in Xen 4.5. Despite the advantages of applying virtualization to systems, the default credit scheduler
CPU Scheduling. Operating Systems (Fall/Winter 2018) Yajin Zhou ( Zhejiang University
 Yajin Zhou ( Zhejiang University") Operating Systems (Fall/Winter 2018) CPU Scheduling Yajin Zhou (http://yajin.org) Zhejiang University Acknowledgement: some pages are based on the slides from Zhi Wang(fsu). Review Motivation to use threads
Operating Systems (Fall/Winter 2018) CPU Scheduling Yajin Zhou (http://yajin.org) Zhejiang University Acknowledgement: some pages are based on the slides from Zhi Wang(fsu). Review Motivation to use threads
Designing, developing, debugging ARM Cortex-A and Cortex-M heterogeneous multi-processor systems
 Designing, developing, debugging ARM and heterogeneous multi-processor systems Kinjal Dave Senior Product Manager, ARM ARM Tech Symposia India December 7 th 2016 Topics Introduction System design Software
Designing, developing, debugging ARM and heterogeneous multi-processor systems Kinjal Dave Senior Product Manager, ARM ARM Tech Symposia India December 7 th 2016 Topics Introduction System design Software
AT-501 Cortex-A5 System On Module Product Brief
 AT-501 Cortex-A5 System On Module Product Brief 1. Scope The following document provides a brief description of the AT-501 System on Module (SOM) its features and ordering options. For more details please
AT-501 Cortex-A5 System On Module Product Brief 1. Scope The following document provides a brief description of the AT-501 System on Module (SOM) its features and ordering options. For more details please
CPU Scheduling. Daniel Mosse. (Most slides are from Sherif Khattab and Silberschatz, Galvin and Gagne 2013)
") CPU Scheduling Daniel Mosse (Most slides are from Sherif Khattab and Silberschatz, Galvin and Gagne 2013) Basic Concepts Maximum CPU utilization obtained with multiprogramming CPU I/O Burst Cycle Process
CPU Scheduling Daniel Mosse (Most slides are from Sherif Khattab and Silberschatz, Galvin and Gagne 2013) Basic Concepts Maximum CPU utilization obtained with multiprogramming CPU I/O Burst Cycle Process
System Architecture Directions for Networked Sensors[1]
![System Architecture Directions for Networked Sensors[1]](/thumbs/81/84408104.jpg "System Architecture Directions for Networked Sensors[1]") System Architecture Directions for Networked Sensors[1] Secure Sensor Networks Seminar presentation Eric Anderson System Architecture Directions for Networked Sensors[1] p. 1 Outline Sensor Network Characteristics
System Architecture Directions for Networked Sensors[1] Secure Sensor Networks Seminar presentation Eric Anderson System Architecture Directions for Networked Sensors[1] p. 1 Outline Sensor Network Characteristics
Real-Time Technology in Linux
 Real-Time Technology in Linux Sven-Thorsten Dietrich Real-Time Architect Introductions MontaVista Software is a leading global supplier of systems software and development tools for intelligent connected
Real-Time Technology in Linux Sven-Thorsten Dietrich Real-Time Architect Introductions MontaVista Software is a leading global supplier of systems software and development tools for intelligent connected
Real-time in embedded Linux systems
 Real-time in embedded Linux systems Michael Opdenacker Copyright 2004-2011, Free Electrons. Creative Commons BY-SA 3.0 license Latest update: Nov 2, 2011, Document sources, updates and translations: http://free-electrons.com/docs/realtime
Real-time in embedded Linux systems Michael Opdenacker Copyright 2004-2011, Free Electrons. Creative Commons BY-SA 3.0 license Latest update: Nov 2, 2011, Document sources, updates and translations: http://free-electrons.com/docs/realtime
10 th AUTOSAR Open Conference
 10 th AUTOSAR Open Conference Yuchen Zhou, Thomas E Fuhrman, Prathap Venugopal General Motors Scheduling Techniques for Automated Driving Systems using the AUTOSAR Adaptive Platform AUTOSAR Nov-2017 Agenda
10 th AUTOSAR Open Conference Yuchen Zhou, Thomas E Fuhrman, Prathap Venugopal General Motors Scheduling Techniques for Automated Driving Systems using the AUTOSAR Adaptive Platform AUTOSAR Nov-2017 Agenda
IOT-GATE-iMX7 Datasheet
 IOT-GATE-iMX7 Datasheet Industrial Internet of Things Gateway Product Specification v.1.3 Capable, compact, affordable: i.mx7 Dual IoT-Gate has been designed to answer demanding IoT application requirements
IOT-GATE-iMX7 Datasheet Industrial Internet of Things Gateway Product Specification v.1.3 Capable, compact, affordable: i.mx7 Dual IoT-Gate has been designed to answer demanding IoT application requirements
Measuring Interrupt Latency
 NXP Semiconductors Document Number: AN12078 Application Note Rev. 0, 10/2017 Measuring Interrupt Latency 1. Introduction The term interrupt latency refers to the delay between the start of an Interrupt
NXP Semiconductors Document Number: AN12078 Application Note Rev. 0, 10/2017 Measuring Interrupt Latency 1. Introduction The term interrupt latency refers to the delay between the start of an Interrupt
Linux Xenomai UAV Sensor platform.
 Linux Xenomai UAV Sensor platform. Hard real time sensor platform for: MSPIL (Mobile Sensor Platform Innovation Lab) AMOS (Autonomous Marine Operations and Systems) AUV (Autonomous Underwater Vehicle)
Linux Xenomai UAV Sensor platform. Hard real time sensor platform for: MSPIL (Mobile Sensor Platform Innovation Lab) AMOS (Autonomous Marine Operations and Systems) AUV (Autonomous Underwater Vehicle)
Lecture notes Lectures 1 through 5 (up through lecture 5 slide 63) Book Chapters 1-4
 Book Chapters 1-4") EE445M Midterm Study Guide (Spring 2017) (updated February 25, 2017): Instructions: Open book and open notes. No calculators or any electronic devices (turn cell phones off). Please be sure that your answers
EE445M Midterm Study Guide (Spring 2017) (updated February 25, 2017): Instructions: Open book and open notes. No calculators or any electronic devices (turn cell phones off). Please be sure that your answers
CEC 450 Real-Time Systems
 CEC 450 Real-Time Systems Lecture 6 Accounting for I/O Latency September 28, 2015 Sam Siewert A Service Release and Response C i WCET Input/Output Latency Interference Time Response Time = Time Actuation
CEC 450 Real-Time Systems Lecture 6 Accounting for I/O Latency September 28, 2015 Sam Siewert A Service Release and Response C i WCET Input/Output Latency Interference Time Response Time = Time Actuation
Real-Time Performance of Linux. OS Latency
 Real-Time Performance of Linux Among others: A Measurement-Based Analysis of the Real- Time Performance of Linux (L. Abeni, A. Goel, C. Krasic, J. Snow, J. Walpole) [RTAS 2002] OS Latency Definition [OS
Real-Time Performance of Linux Among others: A Measurement-Based Analysis of the Real- Time Performance of Linux (L. Abeni, A. Goel, C. Krasic, J. Snow, J. Walpole) [RTAS 2002] OS Latency Definition [OS
AUTOBEST: A United AUTOSAR-OS And ARINC 653 Kernel. Alexander Züpke, Marc Bommert, Daniel Lohmann
 AUTOBEST: A United AUTOSAR-OS And ARINC 653 Kernel Alexander Züpke, Marc Bommert, Daniel Lohmann alexander.zuepke@hs-rm.de, marc.bommert@hs-rm.de, lohmann@cs.fau.de Motivation Automotive and Avionic industry
AUTOBEST: A United AUTOSAR-OS And ARINC 653 Kernel Alexander Züpke, Marc Bommert, Daniel Lohmann alexander.zuepke@hs-rm.de, marc.bommert@hs-rm.de, lohmann@cs.fau.de Motivation Automotive and Avionic industry
Path analysis vs. empirical determination of a system's real-time capabilities: The crucial role of latency tests
 Path analysis vs. empirical determination of a system's real-time capabilities: The crucial role of latency tests Carsten Emde Open Source Automation Development Lab (OSADL) eg Issues leading to system
Path analysis vs. empirical determination of a system's real-time capabilities: The crucial role of latency tests Carsten Emde Open Source Automation Development Lab (OSADL) eg Issues leading to system
Heterogeneous multi-processing with Linux and the CMSIS-DSP library
 Heterogeneous multi-processing with Linux and the CMSIS-DSP library DS-MDK Tutorial AN290, September 2016, V 1.1 Abstract This Application note shows how to use DS-MDK to debug a typical application running
Heterogeneous multi-processing with Linux and the CMSIS-DSP library DS-MDK Tutorial AN290, September 2016, V 1.1 Abstract This Application note shows how to use DS-MDK to debug a typical application running
Linux in ambito industriale, real-time, hypervisors e boot veloce
 1 Linux in ambito industriale, real-time, hypervisors e boot veloce Paolo Gai, pj@evidence.eu.com Bruno Morelli, bruno@evidence.eu.com Applicazioni industriali e real-time su dispositivi eterogenei multi/many-core
1 Linux in ambito industriale, real-time, hypervisors e boot veloce Paolo Gai, pj@evidence.eu.com Bruno Morelli, bruno@evidence.eu.com Applicazioni industriali e real-time su dispositivi eterogenei multi/many-core
A TimeSys Perspective on the Linux Preemptible Kernel Version 1.0. White Paper
 A TimeSys Perspective on the Linux Preemptible Kernel Version 1.0 White Paper A TimeSys Perspective on the Linux Preemptible Kernel A White Paper from TimeSys Corporation Introduction One of the most basic
A TimeSys Perspective on the Linux Preemptible Kernel Version 1.0 White Paper A TimeSys Perspective on the Linux Preemptible Kernel A White Paper from TimeSys Corporation Introduction One of the most basic
Adventures In Real-Time Performance Tuning, Part 2
 Adventures In Real-Time Performance Tuning, Part 2 The real-time for Linux patchset does not guarantee adequate real-time behavior for all target platforms. When using real-time Linux on a new platform
Adventures In Real-Time Performance Tuning, Part 2 The real-time for Linux patchset does not guarantee adequate real-time behavior for all target platforms. When using real-time Linux on a new platform
December 1, 2015 Jason Kridner
 December 1, 2015 Jason Kridner Co-author of BeagleBone Cookbook Board member at BeagleBoard.org Foundation Sitara Applications Engineering at Texas Instruments 1 Truly flexible open hardware and software
December 1, 2015 Jason Kridner Co-author of BeagleBone Cookbook Board member at BeagleBoard.org Foundation Sitara Applications Engineering at Texas Instruments 1 Truly flexible open hardware and software
Chapter 5: CPU Scheduling
 COP 4610: Introduction to Operating Systems (Fall 2016) Chapter 5: CPU Scheduling Zhi Wang Florida State University Contents Basic concepts Scheduling criteria Scheduling algorithms Thread scheduling Multiple-processor
COP 4610: Introduction to Operating Systems (Fall 2016) Chapter 5: CPU Scheduling Zhi Wang Florida State University Contents Basic concepts Scheduling criteria Scheduling algorithms Thread scheduling Multiple-processor
Linux - Not real-time!
 Linux - Not real-time! Date: 16.01.2015 Author(s): Michal Koziel www.bitvis.no 1 Abstract A system is said to be real-time if it can respond to external triggers and perform periodic tasks with deterministic
Linux - Not real-time! Date: 16.01.2015 Author(s): Michal Koziel www.bitvis.no 1 Abstract A system is said to be real-time if it can respond to external triggers and perform periodic tasks with deterministic
Application Testing under Realtime Linux. Luis Claudio R. Gonçalves Red Hat Realtime Team Software Engineer
 Application Testing under Realtime Linux Luis Claudio R. Gonçalves Red Hat Realtime Team Software Engineer Agenda * Realtime Basics * Linux and the PREEMPT_RT patch * About the Tests * Looking for bad
Application Testing under Realtime Linux Luis Claudio R. Gonçalves Red Hat Realtime Team Software Engineer Agenda * Realtime Basics * Linux and the PREEMPT_RT patch * About the Tests * Looking for bad
Implementation and Evaluation of the Synchronization Protocol Immediate Priority Ceiling in PREEMPT-RT Linux
 Implementation and Evaluation of the Synchronization Protocol Immediate Priority Ceiling in PREEMPT-RT Linux Andreu Carminati, Rômulo Silva de Oliveira, Luís Fernando Friedrich, Rodrigo Lange Federal University
Implementation and Evaluation of the Synchronization Protocol Immediate Priority Ceiling in PREEMPT-RT Linux Andreu Carminati, Rômulo Silva de Oliveira, Luís Fernando Friedrich, Rodrigo Lange Federal University
openpowerlink over Xenomai
 openpowerlink over Xenomai Pierre Ficheux (pierre.ficheux@smile.fr) 02/2017 1 $ whoami French embedded Linux developer, writer and teacher CTO @ Smile-ECS (Embedded & Connected Systems) 2 POWERLINK 3 Industrial
openpowerlink over Xenomai Pierre Ficheux (pierre.ficheux@smile.fr) 02/2017 1 $ whoami French embedded Linux developer, writer and teacher CTO @ Smile-ECS (Embedded & Connected Systems) 2 POWERLINK 3 Industrial
Latency on preemptible Real-Time Linux
 Appendix 1 Latency on preemptible Real-Time Linux on DCP-SH7780 Contents 1.1 Getting Started.......................................... 1 1.2 Rtrtc Driver........................................... 2 1.3
Appendix 1 Latency on preemptible Real-Time Linux on DCP-SH7780 Contents 1.1 Getting Started.......................................... 1 1.2 Rtrtc Driver........................................... 2 1.3
Testing real-time Linux: What to test and how.
 Testing real-time Linux: What to test and how. Sripathi Kodi sripathik@in.ibm.com Agenda IBM Linux Technology Center What is a real-time Operating System? Enterprise real-time Real-Time patches for Linux
Testing real-time Linux: What to test and how. Sripathi Kodi sripathik@in.ibm.com Agenda IBM Linux Technology Center What is a real-time Operating System? Enterprise real-time Real-Time patches for Linux
EECS 571 Principles of Real-Time Embedded Systems. Lecture Note #10: More on Scheduling and Introduction of Real-Time OS
 EECS 571 Principles of Real-Time Embedded Systems Lecture Note #10: More on Scheduling and Introduction of Real-Time OS Kang G. Shin EECS Department University of Michigan Mode Changes Changes in mission
EECS 571 Principles of Real-Time Embedded Systems Lecture Note #10: More on Scheduling and Introduction of Real-Time OS Kang G. Shin EECS Department University of Michigan Mode Changes Changes in mission
Computer Science Window-Constrained Process Scheduling for Linux Systems
 Window-Constrained Process Scheduling for Linux Systems Richard West Ivan Ganev Karsten Schwan Talk Outline Goals of this research DWCS background DWCS implementation details Design of the experiments
Window-Constrained Process Scheduling for Linux Systems Richard West Ivan Ganev Karsten Schwan Talk Outline Goals of this research DWCS background DWCS implementation details Design of the experiments
Designing with NXP i.mx8m SoC
 Designing with NXP i.mx8m SoC Course Description Designing with NXP i.mx8m SoC is a 3 days deep dive training to the latest NXP application processor family. The first part of the course starts by overviewing
Designing with NXP i.mx8m SoC Course Description Designing with NXP i.mx8m SoC is a 3 days deep dive training to the latest NXP application processor family. The first part of the course starts by overviewing
Tuned Pipes: End-to-end Throughput and Delay Guarantees for USB Devices. Ahmad Golchin, Zhuoqun Cheng and Richard West Boston University
 Tuned Pipes: End-to-end Throughput and Delay Guarantees for USB Devices Ahmad Golchin, Zhuoqun Cheng and Richard West Boston University Motivations Cyber-physical applications Sensor-actuator loops Ubiquity
Tuned Pipes: End-to-end Throughput and Delay Guarantees for USB Devices Ahmad Golchin, Zhuoqun Cheng and Richard West Boston University Motivations Cyber-physical applications Sensor-actuator loops Ubiquity
Real-Time Operating Systems Design and Implementation. LS 12, TU Dortmund
 Real-Time Operating Systems Design and Implementation (slides are based on Prof. Dr. Jian-Jia Chen) Anas Toma, Jian-Jia Chen LS 12, TU Dortmund October 19, 2017 Anas Toma, Jian-Jia Chen (LS 12, TU Dortmund)
Real-Time Operating Systems Design and Implementation (slides are based on Prof. Dr. Jian-Jia Chen) Anas Toma, Jian-Jia Chen LS 12, TU Dortmund October 19, 2017 Anas Toma, Jian-Jia Chen (LS 12, TU Dortmund)
HKG : OpenAMP Introduction. Wendy Liang
 HKG2018-411: OpenAMP Introduction Wendy Liang Agenda OpenAMP Projects Overview OpenAMP Libraries Changes in Progress Future Improvements OpenAMP Projects Overview Introduction With today s sophisticated
HKG2018-411: OpenAMP Introduction Wendy Liang Agenda OpenAMP Projects Overview OpenAMP Libraries Changes in Progress Future Improvements OpenAMP Projects Overview Introduction With today s sophisticated
Final Exam Study Guide
 Final Exam Study Guide Part 1 Closed book, no crib sheet Part 2 Open book, open notes, calculator (no laptops, phones, devices with screens larger than a TI-89 calculator, devices with wireless communication).
Final Exam Study Guide Part 1 Closed book, no crib sheet Part 2 Open book, open notes, calculator (no laptops, phones, devices with screens larger than a TI-89 calculator, devices with wireless communication).
ELC4438: Embedded System Design ARM Cortex-M Architecture II
 ELC4438: Embedded System Design ARM Cortex-M Architecture II Liang Dong Electrical and Computer Engineering Baylor University Memory system The memory systems in microcontrollers often contain two or more
ELC4438: Embedded System Design ARM Cortex-M Architecture II Liang Dong Electrical and Computer Engineering Baylor University Memory system The memory systems in microcontrollers often contain two or more
CS370 Operating Systems
 CS370 Operating Systems Colorado State University Yashwant K Malaiya Fall 2017 Lecture 10 Slides based on Text by Silberschatz, Galvin, Gagne Various sources 1 1 Chapter 6: CPU Scheduling Basic Concepts
CS370 Operating Systems Colorado State University Yashwant K Malaiya Fall 2017 Lecture 10 Slides based on Text by Silberschatz, Galvin, Gagne Various sources 1 1 Chapter 6: CPU Scheduling Basic Concepts
SE300 SWE Practices. Lecture 10 Introduction to Event- Driven Architectures. Tuesday, March 17, Sam Siewert
 SE300 SWE Practices Lecture 10 Introduction to Event- Driven Architectures Tuesday, March 17, 2015 Sam Siewert Copyright {c} 2014 by the McGraw-Hill Companies, Inc. All rights Reserved. Four Common Types
SE300 SWE Practices Lecture 10 Introduction to Event- Driven Architectures Tuesday, March 17, 2015 Sam Siewert Copyright {c} 2014 by the McGraw-Hill Companies, Inc. All rights Reserved. Four Common Types
Chapter 6: CPU Scheduling
 Chapter 6: CPU Scheduling Basic Concepts Scheduling Criteria Scheduling Algorithms Multiple-Processor Scheduling Real-Time Scheduling Thread Scheduling Operating Systems Examples Java Thread Scheduling
Chapter 6: CPU Scheduling Basic Concepts Scheduling Criteria Scheduling Algorithms Multiple-Processor Scheduling Real-Time Scheduling Thread Scheduling Operating Systems Examples Java Thread Scheduling
Chapter 5: Process Scheduling
 Chapter 5: Process Scheduling Chapter 5: Process Scheduling Basic Concepts Scheduling Criteria Scheduling Algorithms Multiple-Processor Scheduling Thread Scheduling Operating Systems Examples Algorithm
Chapter 5: Process Scheduling Chapter 5: Process Scheduling Basic Concepts Scheduling Criteria Scheduling Algorithms Multiple-Processor Scheduling Thread Scheduling Operating Systems Examples Algorithm
EFM32 Series 0: DMA (ARM PrimeCell µdma PL230)
") EFM32 Series 0: DMA (ARM PrimeCell µdma PL230) EFM32 - DMA DMA has read/write access to most of the EFM32 memory map Flash writes can not be done in memory map, but through sequenced writes to peripheral
EFM32 Series 0: DMA (ARM PrimeCell µdma PL230) EFM32 - DMA DMA has read/write access to most of the EFM32 memory map Flash writes can not be done in memory map, but through sequenced writes to peripheral
Developing deterministic networking technology for railway applications using TTEthernet software-based end systems
 Developing deterministic networking technology for railway applications using TTEthernet software-based end systems Project n 100021 Astrit Ademaj, TTTech Computertechnik AG Outline GENESYS requirements
Developing deterministic networking technology for railway applications using TTEthernet software-based end systems Project n 100021 Astrit Ademaj, TTTech Computertechnik AG Outline GENESYS requirements
Chapter 19: Real-Time Systems. Operating System Concepts 8 th Edition,
 Chapter 19: Real-Time Systems, Silberschatz, Galvin and Gagne 2009 Chapter 19: Real-Time Systems System Characteristics Features of Real-Time Systems Implementing Real-Time Operating Systems Real-Time
Chapter 19: Real-Time Systems, Silberschatz, Galvin and Gagne 2009 Chapter 19: Real-Time Systems System Characteristics Features of Real-Time Systems Implementing Real-Time Operating Systems Real-Time
Matrix. Get Started Guide
 Matrix Get Started Guide Overview Matrix is a single board mini computer based on ARM with a wide range of interface, equipped with a powerful i.mx6 Freescale processor, it can run Android, Linux and other
Matrix Get Started Guide Overview Matrix is a single board mini computer based on ARM with a wide range of interface, equipped with a powerful i.mx6 Freescale processor, it can run Android, Linux and other
ZiLOG Real-Time Kernel Version 1.2.0
 ez80acclaim Family of Microcontrollers Version 1.2.0 PRELIMINARY Introduction The (RZK) is a realtime, preemptive, multitasking kernel designed for time-critical embedded applications. It is currently
ez80acclaim Family of Microcontrollers Version 1.2.0 PRELIMINARY Introduction The (RZK) is a realtime, preemptive, multitasking kernel designed for time-critical embedded applications. It is currently
Applying User-level Drivers on
 Applying User-level Drivers on DTV System Gunho Lee, Senior Research Engineer, ELC, April 18, 2007 Content Background Requirements of DTV Device Drivers Design of LG DTV User-level Drivers Implementation
Applying User-level Drivers on DTV System Gunho Lee, Senior Research Engineer, ELC, April 18, 2007 Content Background Requirements of DTV Device Drivers Design of LG DTV User-level Drivers Implementation
A Server-based Approach for Predictable GPU Access Control
 A Server-based Approach for Predictable GPU Access Control Hyoseung Kim * Pratyush Patel Shige Wang Raj Rajkumar * University of California, Riverside Carnegie Mellon University General Motors R&D Benefits
A Server-based Approach for Predictable GPU Access Control Hyoseung Kim * Pratyush Patel Shige Wang Raj Rajkumar * University of California, Riverside Carnegie Mellon University General Motors R&D Benefits
Subject Name: OPERATING SYSTEMS. Subject Code: 10EC65. Prepared By: Kala H S and Remya R. Department: ECE. Date:
 Subject Name: OPERATING SYSTEMS Subject Code: 10EC65 Prepared By: Kala H S and Remya R Department: ECE Date: Unit 7 SCHEDULING TOPICS TO BE COVERED Preliminaries Non-preemptive scheduling policies Preemptive
Subject Name: OPERATING SYSTEMS Subject Code: 10EC65 Prepared By: Kala H S and Remya R Department: ECE Date: Unit 7 SCHEDULING TOPICS TO BE COVERED Preliminaries Non-preemptive scheduling policies Preemptive
2013 Toshiba Corporation
 2013 Toshiba Corporation Who am I? Yoshitake Kobayashi (YOSHI) Chief Specialist at Corporate Software Engineering Center, TOSHIBA CORPORATION Work on embedded operating systems Linux RTOS TOPPERS (uitron),
2013 Toshiba Corporation Who am I? Yoshitake Kobayashi (YOSHI) Chief Specialist at Corporate Software Engineering Center, TOSHIBA CORPORATION Work on embedded operating systems Linux RTOS TOPPERS (uitron),
Operating Systems, Fall
 Input / Output & Real-time Scheduling Chapter 5.1 5.4, Chapter 7.5 1 I/O Software Device controllers Memory-mapped mapped I/O DMA & interrupts briefly I/O Content I/O software layers and drivers Disks
Input / Output & Real-time Scheduling Chapter 5.1 5.4, Chapter 7.5 1 I/O Software Device controllers Memory-mapped mapped I/O DMA & interrupts briefly I/O Content I/O software layers and drivers Disks
Supporting Time-Sensitive Applications on a Commodity OS
 Supporting Time-Sensitive Applications on a Commodity OS Ashvin Goel, Luca Abeni, Charles Krasic, Jim Snow, Jonathan Walpole Department of Computer Science and Engineering Oregon Graduate Institute, Portland
Supporting Time-Sensitive Applications on a Commodity OS Ashvin Goel, Luca Abeni, Charles Krasic, Jim Snow, Jonathan Walpole Department of Computer Science and Engineering Oregon Graduate Institute, Portland
CPU Scheduling: Objectives
 CPU Scheduling: Objectives CPU scheduling, the basis for multiprogrammed operating systems CPU-scheduling algorithms Evaluation criteria for selecting a CPU-scheduling algorithm for a particular system
CPU Scheduling: Objectives CPU scheduling, the basis for multiprogrammed operating systems CPU-scheduling algorithms Evaluation criteria for selecting a CPU-scheduling algorithm for a particular system
Chapter 5: CPU Scheduling
 Chapter 5: CPU Scheduling Chapter 5: CPU Scheduling Basic Concepts Scheduling Criteria Scheduling Algorithms Thread Scheduling Multiple-Processor Scheduling Operating Systems Examples Algorithm Evaluation
Chapter 5: CPU Scheduling Chapter 5: CPU Scheduling Basic Concepts Scheduling Criteria Scheduling Algorithms Thread Scheduling Multiple-Processor Scheduling Operating Systems Examples Algorithm Evaluation
Exam Review TexPoint fonts used in EMF.
 Exam Review Generics Definitions: hard & soft real-time Task/message classification based on criticality and invocation behavior Why special performance measures for RTES? What s deadline and where is
Exam Review Generics Definitions: hard & soft real-time Task/message classification based on criticality and invocation behavior Why special performance measures for RTES? What s deadline and where is
Matrix. Get Started Guide V2.0
 Matrix Get Started Guide V2.0 Overview Matrix is a single board mini computer based on ARM with a wide range of interface, equipped with a powerful i.mx6 Freescale processor, it can run Android, Linux,
Matrix Get Started Guide V2.0 Overview Matrix is a single board mini computer based on ARM with a wide range of interface, equipped with a powerful i.mx6 Freescale processor, it can run Android, Linux,
Department of Computer Science, Institute for System Architecture, Operating Systems Group. Real-Time Systems '08 / '09. Hardware.
 Department of Computer Science, Institute for System Architecture, Operating Systems Group Real-Time Systems '08 / '09 Hardware Marcus Völp Outlook Hardware is Source of Unpredictability Caches Pipeline
Department of Computer Science, Institute for System Architecture, Operating Systems Group Real-Time Systems '08 / '09 Hardware Marcus Völp Outlook Hardware is Source of Unpredictability Caches Pipeline
NI Linux Real-Time. Fanie Coetzer. Field Sales Engineer SA North. ni.com
 1 NI Linux Real-Time Fanie Coetzer Field Sales Engineer SA North Agenda 1. Hardware Overview 2. Introduction to NI Linux Real-Time OS Background & Core Technology Filesystem Connectivity and Security 3.
1 NI Linux Real-Time Fanie Coetzer Field Sales Engineer SA North Agenda 1. Hardware Overview 2. Introduction to NI Linux Real-Time OS Background & Core Technology Filesystem Connectivity and Security 3.
Chapter 5: CPU Scheduling. Operating System Concepts Essentials 8 th Edition
 Chapter 5: CPU Scheduling Silberschatz, Galvin and Gagne 2011 Chapter 5: CPU Scheduling Basic Concepts Scheduling Criteria Scheduling Algorithms Thread Scheduling Multiple-Processor Scheduling Operating
Chapter 5: CPU Scheduling Silberschatz, Galvin and Gagne 2011 Chapter 5: CPU Scheduling Basic Concepts Scheduling Criteria Scheduling Algorithms Thread Scheduling Multiple-Processor Scheduling Operating
Use ZCU102 TRD to Accelerate Development of ZYNQ UltraScale+ MPSoC
 Use ZCU102 TRD to Accelerate Development of ZYNQ UltraScale+ MPSoC Topics Hardware advantages of ZYNQ UltraScale+ MPSoC Software stacks of MPSoC Target reference design introduction Details about one Design
Use ZCU102 TRD to Accelerate Development of ZYNQ UltraScale+ MPSoC Topics Hardware advantages of ZYNQ UltraScale+ MPSoC Software stacks of MPSoC Target reference design introduction Details about one Design
SOM i1 Single Core SOM (System-On-Module) Rev 1.5
 Rev 1.5") NXP-Freescale i.mx6 SOM i1 Single Core SOM (System-On-Module) Rev 1.5 Simple. Robust. Computing Solutions SolidRun Ltd. 7 Hamada st., Yokne am Illit, 2495900, Israel www.solid-run.com 1 Page Document revision
NXP-Freescale i.mx6 SOM i1 Single Core SOM (System-On-Module) Rev 1.5 Simple. Robust. Computing Solutions SolidRun Ltd. 7 Hamada st., Yokne am Illit, 2495900, Israel www.solid-run.com 1 Page Document revision
Systems Integration. Gautam H. Thaker Patrick J. Lardieri Donald Krecker Keith O Hara Chuck Winters
 Systems Integration Achieving Bounded End-to to-end Latencies with Real-time Linux and Realtime CORBA Gautam H. Thaker Patrick J. Lardieri Donald Krecker Keith O Hara Chuck Winters LM Advanced Technology
Systems Integration Achieving Bounded End-to to-end Latencies with Real-time Linux and Realtime CORBA Gautam H. Thaker Patrick J. Lardieri Donald Krecker Keith O Hara Chuck Winters LM Advanced Technology
QoS Handling with DVFS (CPUfreq & Devfreq)
") QoS Handling with DVFS (CPUfreq & Devfreq) MyungJoo Ham SW Center, 1 Performance Issues of DVFS Performance Sucks w/ DVFS! Battery-life Still Matters More Devices (components) w/ DVFS More Performance
QoS Handling with DVFS (CPUfreq & Devfreq) MyungJoo Ham SW Center, 1 Performance Issues of DVFS Performance Sucks w/ DVFS! Battery-life Still Matters More Devices (components) w/ DVFS More Performance
Life with Adeos. Philippe Gerum. Revision B Copyright 2005
 Copyright 2005 Philippe Gerum Life with Adeos Philippe Gerum Revision B Copyright 2005 Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation
Copyright 2005 Philippe Gerum Life with Adeos Philippe Gerum Revision B Copyright 2005 Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation
Chapter 5 CPU scheduling
 Chapter 5 CPU scheduling Contents Basic Concepts Scheduling Criteria Scheduling Algorithms Multiple-Processor Scheduling Real-Time Scheduling Thread Scheduling Operating Systems Examples Java Thread Scheduling
Chapter 5 CPU scheduling Contents Basic Concepts Scheduling Criteria Scheduling Algorithms Multiple-Processor Scheduling Real-Time Scheduling Thread Scheduling Operating Systems Examples Java Thread Scheduling
Getting Started with FreeRTOS BSP for i.mx 7Dual
 Freescale Semiconductor, Inc. Document Number: FRTOS7DGSUG User s Guide Rev. 0, 08/2015 Getting Started with FreeRTOS BSP for i.mx 7Dual 1 Overview The FreeRTOS BSP for i.mx 7Dual is a Software Development
Freescale Semiconductor, Inc. Document Number: FRTOS7DGSUG User s Guide Rev. 0, 08/2015 Getting Started with FreeRTOS BSP for i.mx 7Dual 1 Overview The FreeRTOS BSP for i.mx 7Dual is a Software Development
Linux Storage System Bottleneck Exploration
 Linux Storage System Bottleneck Exploration Bean Huo / Zoltan Szubbocsev Beanhuo@micron.com / zszubbocsev@micron.com 215 Micron Technology, Inc. All rights reserved. Information, products, and/or specifications
Linux Storage System Bottleneck Exploration Bean Huo / Zoltan Szubbocsev Beanhuo@micron.com / zszubbocsev@micron.com 215 Micron Technology, Inc. All rights reserved. Information, products, and/or specifications
Bringing display and 3D to the C.H.I.P computer
 Embedded Linux Conference 2016 Bringing display and 3D to the C.H.I.P computer Maxime Ripard maxime@bootlin.com Copyright 2004-2018, Bootlin. Creative Commons BY-SA 3.0 license. embedded Linux and kernel
Embedded Linux Conference 2016 Bringing display and 3D to the C.H.I.P computer Maxime Ripard maxime@bootlin.com Copyright 2004-2018, Bootlin. Creative Commons BY-SA 3.0 license. embedded Linux and kernel
LF Real-Time Operating Systems: Evolution and Trends. Kate Stewart. Senior Director of Strategic
 LF Real-Time Operating Systems: Evolution and Trends Kate Stewart. Senior Director of Strategic Programs @_kate_stewart Linux Foundation Real-Time OS Projects: Real-Time Linux & Zephyr Both launched around
LF Real-Time Operating Systems: Evolution and Trends Kate Stewart. Senior Director of Strategic Programs @_kate_stewart Linux Foundation Real-Time OS Projects: Real-Time Linux & Zephyr Both launched around
CS307: Operating Systems
 CS307: Operating Systems Chentao Wu 吴晨涛 Associate Professor Dept. of Computer Science and Engineering Shanghai Jiao Tong University SEIEE Building 3-513 wuct@cs.sjtu.edu.cn Download Lectures ftp://public.sjtu.edu.cn
CS307: Operating Systems Chentao Wu 吴晨涛 Associate Professor Dept. of Computer Science and Engineering Shanghai Jiao Tong University SEIEE Building 3-513 wuct@cs.sjtu.edu.cn Download Lectures ftp://public.sjtu.edu.cn
Real Time: Understanding the Trade-offs Between Determinism and Throughput
 Real Time: Understanding the Trade-offs Between Determinism and Throughput Roland Westrelin, Java Real-Time Engineering, Brian Doherty, Java Performance Engineering, Sun Microsystems, Inc TS-5609 Learn
Real Time: Understanding the Trade-offs Between Determinism and Throughput Roland Westrelin, Java Real-Time Engineering, Brian Doherty, Java Performance Engineering, Sun Microsystems, Inc TS-5609 Learn
CPU Scheduling. CSE 2431: Introduction to Operating Systems Reading: Chapter 6, [OSC] (except Sections )
![CPU Scheduling. CSE 2431: Introduction to Operating Systems Reading: Chapter 6, [OSC] (except Sections )](/thumbs/79/79464788.jpg "CPU Scheduling. CSE 2431: Introduction to Operating Systems Reading: Chapter 6, [OSC] (except Sections )") CPU Scheduling CSE 2431: Introduction to Operating Systems Reading: Chapter 6, [OSC] (except Sections 6.7.2 6.8) 1 Contents Why Scheduling? Basic Concepts of Scheduling Scheduling Criteria A Basic Scheduling
CPU Scheduling CSE 2431: Introduction to Operating Systems Reading: Chapter 6, [OSC] (except Sections 6.7.2 6.8) 1 Contents Why Scheduling? Basic Concepts of Scheduling Scheduling Criteria A Basic Scheduling
MYC-C437X CPU Module
 MYC-C437X CPU Module - Up to 1GHz TI AM437x Series ARM Cortex-A9 Processors - 512MB DDR3 SDRAM, 4GB emmc Flash, 32KB EEPROM - Gigabit Ethernet PHY - Power Management IC - Two 0.8mm pitch 100-pin Board-to-Board
MYC-C437X CPU Module - Up to 1GHz TI AM437x Series ARM Cortex-A9 Processors - 512MB DDR3 SDRAM, 4GB emmc Flash, 32KB EEPROM - Gigabit Ethernet PHY - Power Management IC - Two 0.8mm pitch 100-pin Board-to-Board
Embedded Operating Systems. Unit I and Unit II
 Embedded Operating Systems Unit I and Unit II Syllabus Unit I Operating System Concepts Real-Time Tasks and Types Types of Real-Time Systems Real-Time Operating Systems UNIT I Operating System Manager:
Embedded Operating Systems Unit I and Unit II Syllabus Unit I Operating System Concepts Real-Time Tasks and Types Types of Real-Time Systems Real-Time Operating Systems UNIT I Operating System Manager:
Scheduling Mar. 19, 2018
 15-410...Everything old is new again... Scheduling Mar. 19, 2018 Dave Eckhardt Brian Railing Roger Dannenberg 1 Outline Chapter 5 (or Chapter 7): Scheduling Scheduling-people/textbook terminology note
15-410...Everything old is new again... Scheduling Mar. 19, 2018 Dave Eckhardt Brian Railing Roger Dannenberg 1 Outline Chapter 5 (or Chapter 7): Scheduling Scheduling-people/textbook terminology note