3D Scanning. Lecture courtesy of Szymon Rusinkiewicz Princeton University
|
|
|
- Felix Hart
- 6 years ago
- Views:
Transcription
1 3D Scanning Lecture courtesy of Szymon Rusinkiewicz Princeton University

2 Computer Graphics Pipeline 3D Scanning Shape Motion Rendering Lighting and Reflectance Human time = expensive Sensors = cheap Computer graphics increasingly relies on measurements of the real world
3 3D Scanning Applications Computer graphics Product inspection Robot navigation Product design Archaeology Clothes fitting

4 Industrial Inspection Determine whether manufactured parts are within tolerances

5 Medicine Pre-operatively scan the patient project in real time
6 Medicine Pre-operatively scan the patient project in real time
7 Medicine Pre-operatively scan the patient project in real time

8 Medicine Pre-operatively scan the patient project in real time

9 Scanning Buildings Quality control during construction

10 Clothing Scan a person, custom-fit clothing U.S. Army; booths in malls

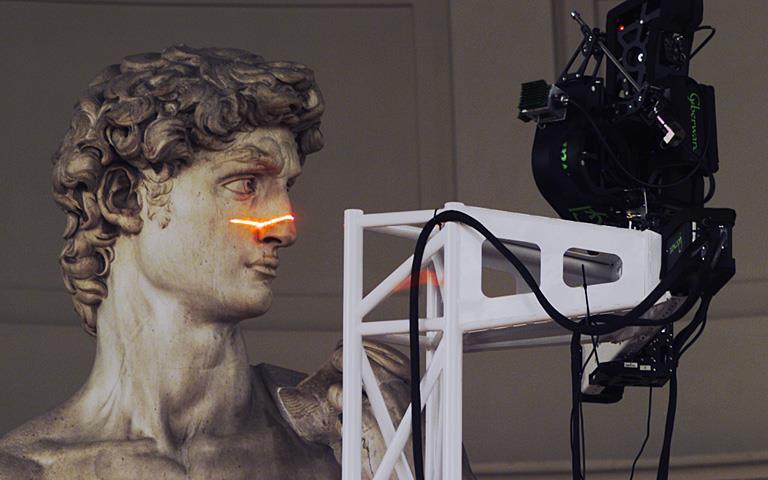
11 The Digital Michelangelo Project










12 The Digital Michelangelo Project
13 Why Scan Sculptures? Virtual museums Controlled interaction (lighting, proximity, etc.) Study working techniques Cultural heritage preservation
14 Goals Scan 10 sculptures by Michelangelo High-resolution ( quarter-millimeter ) geometry Side projects: architectural scanning (Accademia and Medici chapel), scanning fragments of Forma Urbis Romae



15 Why Capture Chisel Marks?? ugnetto Atlas (Accademia)



16 Why Capture Chisel Mark Geometry? 2 mm Day (Medici Chapel)


17 Side project: The Forma Urbis Romae

18 Forma Urbis Romae Fragment side face

19
20 Active Scanners Triangulation (in 2D): To figure out the position of a point we need: 1. The position of the camera 2. The position of the light source Project the light onto the surface Find where the lit point projects onto the camera Cast a ray from the lit pixel, through the camera

21 Active Scanners Triangulation (in 2D): To figure out the position of a point we need: 1. The position of the camera 2. The position of the light source Project the light onto the surface For Find the where lit point the to project The lit point position projects of the lit point onto the appropriate pixel, onto the camera it has to lie somewhere has to on be at the intersection the Cast ray. a ray from the of lit the pixel, two through rays the camera The lit point is also constrained to lie on the ray from the light source.
22 Triangulation Object Laser Camera Project laser stripe onto object

23 Triangulation Object Laser (x,y) Camera Depth from ray-plane triangulation
24 Triangulation: Moving the Camera and Illumination Moving independently leads to problems with calibration Most scanners mount camera and light source rigidly, move them as a unit


25 Triangulation: Moving the Camera and Illumination

26 Triangulation: Moving the Camera and Illumination
 Uncalibrated motions vertical translation rolling the gantry remounting the scan")
27 Scanning a Large Object Calibrated motions pitch (yellow) pan (blue) horizontal translation (orange) Uncalibrated motions vertical translation rolling the gantry remounting the scan head

28 Range Processing Pipeline Steps 1. manual initial alignment 2. ICP to one existing scan 3. global relaxation to spread out error 4. merging using volumetric method
 : 1. For each point on Scan1, find the nearest point on Scan2. 2.")
29 Range Processing Pipeline Steps 1. manual initial alignment 2. ICP to one existing scan 3. global relaxation to spread out error 4. merging using volumetric method ICP( Scan1, Scan2 ) : 1. For each point on Scan1, find the nearest point on Scan2. 2. Translate/Rotate Scan1 to minimize the distance between corresponding points. 3. Go to step 1
30 Range Processing Pipeline Steps 1. manual initial alignment 2. ICP to one existing scan 3. global relaxation to spread out error 4. merging using volumetric method ICP( Scan1, Scan2 ) : 1. For each point on Scan1, find the nearest point on Scan2. 2. Translate/Rotate Scan1 to minimize the distance between corresponding points. 3. Go to step 1
31 Recall Given a matrix: M = m 11 m n1 m 1n m nn The trace is the sum of the diagonal entries: Trace M = i m ii
32 Recall 1. Given matrices P and Q, we have: P Q t = Q t P t 2. Given a square matrix P, we have: Trace P = Trace(P t ) 3. Given matrices P and Q, we have: Trace P Q = Trace(Q P) 4. Given vectors v and w, we have: v ± w 2 = v 2 + w 2 ± 2 v, w
33 Recall Given a set of points Ԧp 1,, Ԧp n R m, we can construct the n m matrix which has the points as columns: P = Ԧp 1 Ԧp n Given the transformation M R m m, the matrix defined by the transformed points is: M Ԧp 1 M Ԧp n = M P
34 Recall Given two such n m matrices P = ( Ԧp 1 Ԧp n ) and Q = ( Ԧq 1 Ԧq n ), we have: P t Q = Ԧp 1, Ԧq 1 Ԧp 1, Ԧq n Ԧp n, Ԧq 1 Ԧp n, Ԧq n In particular, we have: n Trace(P t Q) = i=1 p i, q i
35 Recall Given two such n m matrices P = ( Ԧp 1 Ԧp n ) and Q = ( Ԧq 1 Ԧq n ), we have: P t Q = Ԧp 1, Ԧq 1 Ԧp 1, Ԧq n Ԧp n, Ԧq 1 Ԧp n, Ԧq n If R is an orthogonal transformation: R t R = Id. The columns of R are orthonormal vectors R ij 1
36 Recall 1. If F Ԧp = Ԧp 2 then: F = p x 2 + p y 2 + p z 2 = 2p x, 2p y, 2p z = 2 Ԧp 2. If F Ԧp = Ԧp, Ԧq then: F = p x q x + p y q y + p z q z = q x, q y, q z = Ԧq
37 Claim Given a diagonal matrix D, the orthogonal transformation R maximizing the trace: Trace R D is the matrix: sign(d 11 ) 0 R = sign D = 0 sign(d nn ) This gives: Trace R D = sign D 11 D sign D nn D nn = D D nn
38 Proof Setting: R = R 11 R n1 D = R 1n R nn D D nn we get: Trace R D = R 11 D R nn D nn Since the columns of R have square norm equal to one, we must have R ii 1. This implies that for any choice of R we must have: Trace R D D D nn
39 ICP Registration Goal: Given points Ԧp 1,, Ԧp n R m and Ԧq 1,, Ԧq n R m, find the translation Ԧδ R m and orthogonal transform R R m m that best aligns { Ԧp i } to { Ԧq i }. That is, find Ԧδ and R minimizing the alignment energy: n E( Ԧδ, R) = i=1 R( Ԧp i + Ԧδ) Ԧq i 2
40 ICP Registration Goal: 1. Find the translation Ԧδ minimizing: n E( Ԧδ) = i=1 n = 2 ( Ԧp i + Ԧδ) Ԧq i Ԧp i Ԧq 2 i + Ԧδ 2 2 Ԧp i Ԧq i, Ԧδ i=1 n E( Ԧδ) = 2n Ԧδ 2 Ԧp i Ԧq i i=1
41 ICP Registration Goal: 1. Find the translation Ԧδ minimizing: n E( Ԧδ) = 2n Ԧδ 2 i=1 Ԧp i Ԧq i The minimizing translation must satisfy: E( Ԧδ) = 0 n Ԧδ = 1 n i=1 ( Ԧp i Ԧq i )
42 ICP Registration Goal: 2. Find the orthogonal transform R minimizing: n 2 E R = R( Ԧp i ) Ԧq i i=1 n = R( Ԧp i ) 2 + Ԧq 2 i 2 R( Ԧp i ), Ԧq i i=1 Minimizing E(R) is the same as maximizing: n E R = R p i, q i i=1
43 ICP Registration Goal: 2. Find the orthogonal transform R maximizing: n E R = R Ԧp i, Ԧq i = Trace P t R t Q i=1
44 ICP Registration Goal: 2. Find the orthogonal transform R maximizing: n E R = R Ԧp i, Ԧq i = Trace P t R t Q i=1 = Trace Q P t R t = Trace R P Q t
45 ICP Registration Goal: 2. Find the orthogonal transform R maximizing: E R = Trace R P Q t Computing the singular value decomposition: P Q t = U D V t with U and V orthogonal and D diagonal. This gives: E R = Trace R U D V t = Trace (V t R U D)
46 ICP Registration Goal: 2. Find the orthogonal transform R maximizing: E R = Trace (V t R U D) Since V t R U is orthogonal, this is maximized if: V t R U = sign(d) R = V sign D U t

47 Range Processing Pipeline Steps 1. manual initial alignment 2. ICP to one existing scan 3. global relaxation to spread out error 4. merging using volumetric method



48 Range Processing Pipeline + Steps 1. manual initial alignment 2. ICP to one existing scan 3. global relaxation to spread out error 4. merging using volumetric method



49 Range Processing Pipeline Steps 1. manual initial alignment 2. ICP to one existing scan 3. global relaxation to spread out error 4. merging using volumetric method

50 Statistics About the Scan of David 480 individually aimed scans 0.3 mm sample spacing 2 billion polygons 7,000 color images 32 gigabytes 30 nights of scanning 22 people



51 Head of Michelangelo s David Photograph 1.0 mm computer model
Sculpture Scanning. 3D Photography. Applications. Graphics Research. Why Scan Sculptures? Why Scan Sculptures? The Pietà Project
 3D Photography Obtaining 3D shape (and sometimes color) of real-world objects Applications Determine whether manufactured parts are within tolerances Plan surgery on computer model, visualize in real time
3D Photography Obtaining 3D shape (and sometimes color) of real-world objects Applications Determine whether manufactured parts are within tolerances Plan surgery on computer model, visualize in real time
CSc Topics in Computer Graphics 3D Photography
 CSc 83010 Topics in Computer Graphics 3D Photography Tuesdays 11:45-1:45 1:45 Room 3305 Ioannis Stamos istamos@hunter.cuny.edu Office: 1090F, Hunter North (Entrance at 69 th bw/ / Park and Lexington Avenues)
CSc 83010 Topics in Computer Graphics 3D Photography Tuesdays 11:45-1:45 1:45 Room 3305 Ioannis Stamos istamos@hunter.cuny.edu Office: 1090F, Hunter North (Entrance at 69 th bw/ / Park and Lexington Avenues)
L2 Data Acquisition. Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods
 Structured light Range images Shape from shading Other methods") L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
Image-based modeling (IBM) and image-based rendering (IBR)
 and image-based rendering (IBR)") Image-based modeling (IBM) and image-based rendering (IBR) CS 248 - Introduction to Computer Graphics Autumn quarter, 2005 Slides for December 8 lecture The graphics pipeline modeling animation rendering
Image-based modeling (IBM) and image-based rendering (IBR) CS 248 - Introduction to Computer Graphics Autumn quarter, 2005 Slides for December 8 lecture The graphics pipeline modeling animation rendering
An idea which can be used once is a trick. If it can be used more than once it becomes a method
 An idea which can be used once is a trick. If it can be used more than once it becomes a method - George Polya and Gabor Szego University of Texas at Arlington Rigid Body Transformations & Generalized
An idea which can be used once is a trick. If it can be used more than once it becomes a method - George Polya and Gabor Szego University of Texas at Arlington Rigid Body Transformations & Generalized
3D Scanning. Qixing Huang Feb. 9 th Slide Credit: Yasutaka Furukawa
 3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
3D Point Cloud Processing
 3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Surface Registration. Gianpaolo Palma
 Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
Project 2 due today Project 3 out today. Readings Szeliski, Chapter 10 (through 10.5)
") Announcements Stereo Project 2 due today Project 3 out today Single image stereogram, by Niklas Een Readings Szeliski, Chapter 10 (through 10.5) Public Library, Stereoscopic Looking Room, Chicago, by Phillips,
Announcements Stereo Project 2 due today Project 3 out today Single image stereogram, by Niklas Een Readings Szeliski, Chapter 10 (through 10.5) Public Library, Stereoscopic Looking Room, Chicago, by Phillips,
Global Non-Rigid Alignment. Benedict J. Brown Katholieke Universiteit Leuven
 Global Non-Rigid Alignment Benedict J. Brown Katholieke Universiteit Leuven 3-D Scanning Pipeline Acquisition Scanners acquire data from a single viewpoint 3-D Scanning Pipeline Acquisition Alignment 3-D
Global Non-Rigid Alignment Benedict J. Brown Katholieke Universiteit Leuven 3-D Scanning Pipeline Acquisition Scanners acquire data from a single viewpoint 3-D Scanning Pipeline Acquisition Alignment 3-D
Perspective projection
 Sensors Ioannis Stamos Perspective projection Pinhole & the Perspective Projection (x,y) SCENE SCREEN Is there an image being formed on the screen?
Sensors Ioannis Stamos Perspective projection Pinhole & the Perspective Projection (x,y) SCENE SCREEN Is there an image being formed on the screen?
Rendering. Converting a 3D scene to a 2D image. Camera. Light. Rendering. View Plane
 Rendering Pipeline Rendering Converting a 3D scene to a 2D image Rendering Light Camera 3D Model View Plane Rendering Converting a 3D scene to a 2D image Basic rendering tasks: Modeling: creating the world
Rendering Pipeline Rendering Converting a 3D scene to a 2D image Rendering Light Camera 3D Model View Plane Rendering Converting a 3D scene to a 2D image Basic rendering tasks: Modeling: creating the world
Compact and Low Cost System for the Measurement of Accurate 3D Shape and Normal
 Compact and Low Cost System for the Measurement of Accurate 3D Shape and Normal Ryusuke Homma, Takao Makino, Koichi Takase, Norimichi Tsumura, Toshiya Nakaguchi and Yoichi Miyake Chiba University, Japan
Compact and Low Cost System for the Measurement of Accurate 3D Shape and Normal Ryusuke Homma, Takao Makino, Koichi Takase, Norimichi Tsumura, Toshiya Nakaguchi and Yoichi Miyake Chiba University, Japan
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
Object Dimension Inspection Utilizing 3D Laser Scanner
 The 1 st Regional Conference of Eng. Sci. NUCEJ Spatial ISSUE vol.11, No.3, 2008 pp 494-500 Object Dimension Inspection Utilizing 3D Laser Scanner Mohammed Z. Al-Faiz, MSc, PhD College of Eng./Nahrain
The 1 st Regional Conference of Eng. Sci. NUCEJ Spatial ISSUE vol.11, No.3, 2008 pp 494-500 Object Dimension Inspection Utilizing 3D Laser Scanner Mohammed Z. Al-Faiz, MSc, PhD College of Eng./Nahrain
3D Object Representations. COS 526, Fall 2016 Princeton University
 3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
Modeling. Michael Kazhdan ( /657) HB FvDFH Modeling Seashells, Fowler et al. 1992
 HB FvDFH Modeling Seashells, Fowler et al. 1992") Modeling Michael Kazhdan (601.457/657) HB 10.18 10.19 FvDFH 20.2 20.4 Modeling Seashells, Fowler et al. 1992 Modeling How do we... Represent 3D objects in a computer? Construct such representations quickly
Modeling Michael Kazhdan (601.457/657) HB 10.18 10.19 FvDFH 20.2 20.4 Modeling Seashells, Fowler et al. 1992 Modeling How do we... Represent 3D objects in a computer? Construct such representations quickly
3D Models from Range Sensors. Gianpaolo Palma
 3D Models from Range Sensors Gianpaolo Palma Who Gianpaolo Palma Researcher at Visual Computing Laboratory (ISTI-CNR) Expertise: 3D scanning, Mesh Processing, Computer Graphics E-mail: gianpaolo.palma@isti.cnr.it
3D Models from Range Sensors Gianpaolo Palma Who Gianpaolo Palma Researcher at Visual Computing Laboratory (ISTI-CNR) Expertise: 3D scanning, Mesh Processing, Computer Graphics E-mail: gianpaolo.palma@isti.cnr.it
Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction
 Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction Carsten Rother 09/12/2013 Computer Vision I: Multi-View 3D reconstruction Roadmap this lecture Computer Vision I: Multi-View
Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction Carsten Rother 09/12/2013 Computer Vision I: Multi-View 3D reconstruction Roadmap this lecture Computer Vision I: Multi-View
Recap from Previous Lecture
 Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
The main problem of photogrammetry
 Structured Light Structured Light The main problem of photogrammetry to recover shape from multiple views of a scene, we need to find correspondences between the images the matching/correspondence problem
Structured Light Structured Light The main problem of photogrammetry to recover shape from multiple views of a scene, we need to find correspondences between the images the matching/correspondence problem
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo In this lecture, we ll first discuss another framework for describing stereo systems called active stereo, and then introduce the problem of volumetric stereo,
Lecture 8 Active stereo & Volumetric stereo In this lecture, we ll first discuss another framework for describing stereo systems called active stereo, and then introduce the problem of volumetric stereo,
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Camera Model and Calibration
 Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Structure from Motion and Multi- view Geometry. Last lecture
 Structure from Motion and Multi- view Geometry Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 5 Last lecture S. J. Gortler, R. Grzeszczuk, R. Szeliski,M. F. Cohen The Lumigraph, SIGGRAPH,
Structure from Motion and Multi- view Geometry Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 5 Last lecture S. J. Gortler, R. Grzeszczuk, R. Szeliski,M. F. Cohen The Lumigraph, SIGGRAPH,
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
3D Modeling: Surfaces
 CS 430/536 Computer Graphics I 3D Modeling: Surfaces Week 8, Lecture 16 David Breen, William Regli and Maxim Peysakhov Geometric and Intelligent Computing Laboratory Department of Computer Science Drexel
CS 430/536 Computer Graphics I 3D Modeling: Surfaces Week 8, Lecture 16 David Breen, William Regli and Maxim Peysakhov Geometric and Intelligent Computing Laboratory Department of Computer Science Drexel
Image-Based Modeling and Rendering. Image-Based Modeling and Rendering. Final projects IBMR. What we have learnt so far. What IBMR is about
 Image-Based Modeling and Rendering Image-Based Modeling and Rendering MIT EECS 6.837 Frédo Durand and Seth Teller 1 Some slides courtesy of Leonard McMillan, Wojciech Matusik, Byong Mok Oh, Max Chen 2
Image-Based Modeling and Rendering Image-Based Modeling and Rendering MIT EECS 6.837 Frédo Durand and Seth Teller 1 Some slides courtesy of Leonard McMillan, Wojciech Matusik, Byong Mok Oh, Max Chen 2
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
COMP 558 lecture 19 Nov. 17, 2010
 COMP 558 lecture 9 Nov. 7, 2 Camera calibration To estimate the geometry of 3D scenes, it helps to know the camera parameters, both external and internal. The problem of finding all these parameters is
COMP 558 lecture 9 Nov. 7, 2 Camera calibration To estimate the geometry of 3D scenes, it helps to know the camera parameters, both external and internal. The problem of finding all these parameters is
3D photography. Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/5/15
 3D photography Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/5/15 with slides by Szymon Rusinkiewicz, Richard Szeliski, Steve Seitz and Brian Curless Announcements Project #3 is due on 5/20.
3D photography Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/5/15 with slides by Szymon Rusinkiewicz, Richard Szeliski, Steve Seitz and Brian Curless Announcements Project #3 is due on 5/20.
Geometry of Multiple views
 1 Geometry of Multiple views CS 554 Computer Vision Pinar Duygulu Bilkent University 2 Multiple views Despite the wealth of information contained in a a photograph, the depth of a scene point along the
1 Geometry of Multiple views CS 554 Computer Vision Pinar Duygulu Bilkent University 2 Multiple views Despite the wealth of information contained in a a photograph, the depth of a scene point along the
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Stereo and structured light
 Stereo and structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 20 Course announcements Homework 5 is still ongoing. - Make sure
Stereo and structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 20 Course announcements Homework 5 is still ongoing. - Make sure
Camera Calibration. COS 429 Princeton University
 Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Lecture 9: Epipolar Geometry
 Lecture 9: Epipolar Geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Why is stereo useful? Epipolar constraints Essential and fundamental matrix Estimating F (Problem Set 2
Lecture 9: Epipolar Geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Why is stereo useful? Epipolar constraints Essential and fundamental matrix Estimating F (Problem Set 2
Two-view geometry Computer Vision Spring 2018, Lecture 10
 Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
3D Photography: Active Ranging, Structured Light, ICP
 3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
Reminder: Lecture 20: The Eight-Point Algorithm. Essential/Fundamental Matrix. E/F Matrix Summary. Computing F. Computing F from Point Matches
 Reminder: Lecture 20: The Eight-Point Algorithm F = -0.00310695-0.0025646 2.96584-0.028094-0.00771621 56.3813 13.1905-29.2007-9999.79 Readings T&V 7.3 and 7.4 Essential/Fundamental Matrix E/F Matrix Summary
Reminder: Lecture 20: The Eight-Point Algorithm F = -0.00310695-0.0025646 2.96584-0.028094-0.00771621 56.3813 13.1905-29.2007-9999.79 Readings T&V 7.3 and 7.4 Essential/Fundamental Matrix E/F Matrix Summary
ENGN D Photography / Spring 2018 / SYLLABUS
 ENGN 2502 3D Photography / Spring 2018 / SYLLABUS Description of the proposed course Over the last decade digital photography has entered the mainstream with inexpensive, miniaturized cameras routinely
ENGN 2502 3D Photography / Spring 2018 / SYLLABUS Description of the proposed course Over the last decade digital photography has entered the mainstream with inexpensive, miniaturized cameras routinely
Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV Venus de Milo
 Vision Sensing Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV 2007 Venus de Milo The Digital Michelangelo Project, Stanford How to sense 3D very accurately? How to sense
Vision Sensing Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV 2007 Venus de Milo The Digital Michelangelo Project, Stanford How to sense 3D very accurately? How to sense
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into
 2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
Fast and robust techniques for 3D/2D registration and photo blending on massive point clouds
 www.crs4.it/vic/ vcg.isti.cnr.it/ Fast and robust techniques for 3D/2D registration and photo blending on massive point clouds R. Pintus, E. Gobbetti, M.Agus, R. Combet CRS4 Visual Computing M. Callieri
www.crs4.it/vic/ vcg.isti.cnr.it/ Fast and robust techniques for 3D/2D registration and photo blending on massive point clouds R. Pintus, E. Gobbetti, M.Agus, R. Combet CRS4 Visual Computing M. Callieri
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Capturing, Modeling, Rendering 3D Structures
 Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by ) Readings Szeliski, Chapter 10 (through 10.5)
 Readings Szeliski, Chapter 10 (through 10.5)") Announcements Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by email) One-page writeup (from project web page), specifying:» Your team members» Project goals. Be specific.
Announcements Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by email) One-page writeup (from project web page), specifying:» Your team members» Project goals. Be specific.
Lecture 9 & 10: Stereo Vision
 Lecture 9 & 10: Stereo Vision Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? IntroducEon to stereo vision Epipolar geometry: a gentle intro Parallel images Image receficaeon Solving
Lecture 9 & 10: Stereo Vision Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? IntroducEon to stereo vision Epipolar geometry: a gentle intro Parallel images Image receficaeon Solving
3D Transformations. CS 4620 Lecture 10. Cornell CS4620 Fall 2014 Lecture Steve Marschner (with previous instructors James/Bala)
") 3D Transformations CS 4620 Lecture 10 1 Translation 2 Scaling 3 Rotation about z axis 4 Rotation about x axis 5 Rotation about y axis 6 Properties of Matrices Translations: linear part is the identity
3D Transformations CS 4620 Lecture 10 1 Translation 2 Scaling 3 Rotation about z axis 4 Rotation about x axis 5 Rotation about y axis 6 Properties of Matrices Translations: linear part is the identity
Generating 3D Meshes from Range Data
 Princeton University COS598B Lectures on 3D Modeling Generating 3D Meshes from Range Data Robert Kalnins Robert Osada Overview Range Images Optical Scanners Error sources and solutions Range Surfaces Mesh
Princeton University COS598B Lectures on 3D Modeling Generating 3D Meshes from Range Data Robert Kalnins Robert Osada Overview Range Images Optical Scanners Error sources and solutions Range Surfaces Mesh
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Virtual Reality Model of Koumokuten Generated from Measurement
 Virtual Reality Model of Koumokuten Generated from Measurement Hiroki UNTEN Graduate School of Information Science and Technology The University of Tokyo unten@cvl.iis.u-tokyo.ac.jp Katsushi IKEUCHI Graduate
Virtual Reality Model of Koumokuten Generated from Measurement Hiroki UNTEN Graduate School of Information Science and Technology The University of Tokyo unten@cvl.iis.u-tokyo.ac.jp Katsushi IKEUCHI Graduate
Stereo vision. Many slides adapted from Steve Seitz
 Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Lecture 14: Computer Vision
 CS/b: Artificial Intelligence II Prof. Olga Veksler Lecture : Computer Vision D shape from Images Stereo Reconstruction Many Slides are from Steve Seitz (UW), S. Narasimhan Outline Cues for D shape perception
CS/b: Artificial Intelligence II Prof. Olga Veksler Lecture : Computer Vision D shape from Images Stereo Reconstruction Many Slides are from Steve Seitz (UW), S. Narasimhan Outline Cues for D shape perception
Fundamentals of 3D. Lecture 3: Debriefing: Lecture 2 Rigid transformations Quaternions Iterative Closest Point (+Kd-trees)
") INF555 Fundamentals of 3D Lecture 3: Debriefing: Lecture 2 Rigid transformations Quaternions Iterative Closest Point (+Kd-trees) Frank Nielsen nielsen@lix.polytechnique.fr Harris-Stephens' combined corner/edge
INF555 Fundamentals of 3D Lecture 3: Debriefing: Lecture 2 Rigid transformations Quaternions Iterative Closest Point (+Kd-trees) Frank Nielsen nielsen@lix.polytechnique.fr Harris-Stephens' combined corner/edge
1999, Denis Zorin. Ray tracing
 Ray tracing Ray tracing shadow rays normal reflected ray pixel ray camera normal Ray casting/ray tracing Iterate over pixels, not objects. Effects that are difficult with Z-buffer, are easy with ray tracing:
Ray tracing Ray tracing shadow rays normal reflected ray pixel ray camera normal Ray casting/ray tracing Iterate over pixels, not objects. Effects that are difficult with Z-buffer, are easy with ray tracing:
3D Computer Vision. Depth Cameras. Prof. Didier Stricker. Oliver Wasenmüller
 3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Epipolar geometry. x x
 Two-view geometry Epipolar geometry X x x Baseline line connecting the two camera centers Epipolar Plane plane containing baseline (1D family) Epipoles = intersections of baseline with image planes = projections
Two-view geometry Epipolar geometry X x x Baseline line connecting the two camera centers Epipolar Plane plane containing baseline (1D family) Epipoles = intersections of baseline with image planes = projections
EECS 442 Computer vision. Stereo systems. Stereo vision Rectification Correspondence problem Active stereo vision systems
 EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
Structure from Motion. Prof. Marco Marcon
 Structure from Motion Prof. Marco Marcon Summing-up 2 Stereo is the most powerful clue for determining the structure of a scene Another important clue is the relative motion between the scene and (mono)
Structure from Motion Prof. Marco Marcon Summing-up 2 Stereo is the most powerful clue for determining the structure of a scene Another important clue is the relative motion between the scene and (mono)
Talk plan. 3d model. Applications: cultural heritage 5/9/ d shape reconstruction from photographs: a Multi-View Stereo approach
 Talk plan 3d shape reconstruction from photographs: a Multi-View Stereo approach Introduction Multi-View Stereo pipeline Carlos Hernández George Vogiatzis Yasutaka Furukawa Google Aston University Google
Talk plan 3d shape reconstruction from photographs: a Multi-View Stereo approach Introduction Multi-View Stereo pipeline Carlos Hernández George Vogiatzis Yasutaka Furukawa Google Aston University Google
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
CS201 Computer Vision Camera Geometry
 CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
Structured light , , Computational Photography Fall 2017, Lecture 27
 Structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 27 Course announcements Homework 5 has been graded. - Mean: 129. - Median:
Structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 27 Course announcements Homework 5 has been graded. - Mean: 129. - Median:
Binocular stereo. Given a calibrated binocular stereo pair, fuse it to produce a depth image. Where does the depth information come from?
 Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
Overview: Ray Tracing & The Perspective Projection Pipeline
 Overview: Ray Tracing & The Perspective Projection Pipeline Lecture #2 Thursday, August 28 2014 About this Lecture! This is an overview.! Think of it as a quick tour moving fast.! Some parts, e.g. math,
Overview: Ray Tracing & The Perspective Projection Pipeline Lecture #2 Thursday, August 28 2014 About this Lecture! This is an overview.! Think of it as a quick tour moving fast.! Some parts, e.g. math,
Mobile Point Fusion. Real-time 3d surface reconstruction out of depth images on a mobile platform
 Mobile Point Fusion Real-time 3d surface reconstruction out of depth images on a mobile platform Aaron Wetzler Presenting: Daniel Ben-Hoda Supervisors: Prof. Ron Kimmel Gal Kamar Yaron Honen Supported
Mobile Point Fusion Real-time 3d surface reconstruction out of depth images on a mobile platform Aaron Wetzler Presenting: Daniel Ben-Hoda Supervisors: Prof. Ron Kimmel Gal Kamar Yaron Honen Supported
Polygon Triangulation. (slides partially by Daniel Vlasic )
") Polygon Triangulation (slides partially by Daniel Vlasic ) Triangulation: Definition Triangulation of a simple polygon P: decomposition of P into triangles by a maximal set of non-intersecting diagonals
Polygon Triangulation (slides partially by Daniel Vlasic ) Triangulation: Definition Triangulation of a simple polygon P: decomposition of P into triangles by a maximal set of non-intersecting diagonals
IBM Pietà 3D Scanning Project :
 The IBM Pieta Project: A Historical Perspective Gabriel Taubin Brown University IBM Pietà 3D Scanning Project : 1998-2000 Shape Appearance http://www.research.ibm.com/pieta IBM Visual and Geometric Computing
The IBM Pieta Project: A Historical Perspective Gabriel Taubin Brown University IBM Pietà 3D Scanning Project : 1998-2000 Shape Appearance http://www.research.ibm.com/pieta IBM Visual and Geometric Computing
CS130 : Computer Graphics Lecture 2: Graphics Pipeline. Tamar Shinar Computer Science & Engineering UC Riverside
 CS130 : Computer Graphics Lecture 2: Graphics Pipeline Tamar Shinar Computer Science & Engineering UC Riverside Raster Devices and Images Raster Devices - raster displays show images as a rectangular array
CS130 : Computer Graphics Lecture 2: Graphics Pipeline Tamar Shinar Computer Science & Engineering UC Riverside Raster Devices and Images Raster Devices - raster displays show images as a rectangular array
TU/e. DBL Algorithms Curve and Network Reconstruction. Project coordinator: Mark de Berg
 DBL Algorithms Curve and Network Reconstruction Project coordinator: Mark de Berg The project in a nutshell solve complicated algorithmic problem in a team: design, analyze, and implement algorithm perform
DBL Algorithms Curve and Network Reconstruction Project coordinator: Mark de Berg The project in a nutshell solve complicated algorithmic problem in a team: design, analyze, and implement algorithm perform
Computer Vision. 3D acquisition
 è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
Lecture'9'&'10:'' Stereo'Vision'
 Lecture'9'&'10:'' Stereo'Vision' Dr.'Juan'Carlos'Niebles' Stanford'AI'Lab' ' Professor'FeiAFei'Li' Stanford'Vision'Lab' 1' Dimensionality'ReducIon'Machine'(3D'to'2D)' 3D world 2D image Point of observation
Lecture'9'&'10:'' Stereo'Vision' Dr.'Juan'Carlos'Niebles' Stanford'AI'Lab' ' Professor'FeiAFei'Li' Stanford'Vision'Lab' 1' Dimensionality'ReducIon'Machine'(3D'to'2D)' 3D world 2D image Point of observation
Structured Light. Tobias Nöll Thanks to Marc Pollefeys, David Nister and David Lowe
 Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO
 Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
CS 354R: Computer Game Technology
 CS 354R: Computer Game Technology Texture and Environment Maps Fall 2018 Texture Mapping Problem: colors, normals, etc. are only specified at vertices How do we add detail between vertices without incurring
CS 354R: Computer Game Technology Texture and Environment Maps Fall 2018 Texture Mapping Problem: colors, normals, etc. are only specified at vertices How do we add detail between vertices without incurring
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Camera Model and Calibration. Lecture-12
 Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
5.2 Surface Registration
 Spring 2018 CSCI 621: Digital Geometry Processing 5.2 Surface Registration Hao Li http://cs621.hao-li.com 1 Acknowledgement Images and Slides are courtesy of Prof. Szymon Rusinkiewicz, Princeton University
Spring 2018 CSCI 621: Digital Geometry Processing 5.2 Surface Registration Hao Li http://cs621.hao-li.com 1 Acknowledgement Images and Slides are courtesy of Prof. Szymon Rusinkiewicz, Princeton University
3D Photography: Stereo
 3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
XPM 2D Transformations Week 2, Lecture 3
 CS 430/585 Computer Graphics I XPM 2D Transformations Week 2, Lecture 3 David Breen, William Regli and Maxim Peysakhov Geometric and Intelligent Computing Laboratory Department of Computer Science Drexel
CS 430/585 Computer Graphics I XPM 2D Transformations Week 2, Lecture 3 David Breen, William Regli and Maxim Peysakhov Geometric and Intelligent Computing Laboratory Department of Computer Science Drexel
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Module 6: Pinhole camera model Lecture 32: Coordinate system conversion, Changing the image/world coordinate system
 The Lecture Contains: Back-projection of a 2D point to 3D 6.3 Coordinate system conversion file:///d /...(Ganesh%20Rana)/MY%20COURSE_Ganesh%20Rana/Prof.%20Sumana%20Gupta/FINAL%20DVSP/lecture%2032/32_1.htm[12/31/2015
The Lecture Contains: Back-projection of a 2D point to 3D 6.3 Coordinate system conversion file:///d /...(Ganesh%20Rana)/MY%20COURSE_Ganesh%20Rana/Prof.%20Sumana%20Gupta/FINAL%20DVSP/lecture%2032/32_1.htm[12/31/2015
Rectification and Distortion Correction
 Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
Advanced Computer Graphics Transformations. Matthias Teschner
 Advanced Computer Graphics Transformations Matthias Teschner Motivation Transformations are used To convert between arbitrary spaces, e.g. world space and other spaces, such as object space, camera space
Advanced Computer Graphics Transformations Matthias Teschner Motivation Transformations are used To convert between arbitrary spaces, e.g. world space and other spaces, such as object space, camera space
Stereo Observation Models
 Stereo Observation Models Gabe Sibley June 16, 2003 Abstract This technical report describes general stereo vision triangulation and linearized error modeling. 0.1 Standard Model Equations If the relative
Stereo Observation Models Gabe Sibley June 16, 2003 Abstract This technical report describes general stereo vision triangulation and linearized error modeling. 0.1 Standard Model Equations If the relative
CITS 4402 Computer Vision
 CITS 4402 Computer Vision Prof Ajmal Mian Lecture 12 3D Shape Analysis & Matching Overview of this lecture Revision of 3D shape acquisition techniques Representation of 3D data Applying 2D image techniques
CITS 4402 Computer Vision Prof Ajmal Mian Lecture 12 3D Shape Analysis & Matching Overview of this lecture Revision of 3D shape acquisition techniques Representation of 3D data Applying 2D image techniques
GABRIELE GUIDI, PHD POLITECNICO DI MILANO, ITALY VISITING SCHOLAR AT INDIANA UNIVERSITY NOV OCT D IMAGE FUSION
 GABRIELE GUIDI, PHD POLITECNICO DI MILANO, ITALY VISITING SCHOLAR AT INDIANA UNIVERSITY NOV 2017 - OCT 2018 3D IMAGE FUSION 3D IMAGE FUSION WHAT A 3D IMAGE IS? A cloud of 3D points collected from a 3D
GABRIELE GUIDI, PHD POLITECNICO DI MILANO, ITALY VISITING SCHOLAR AT INDIANA UNIVERSITY NOV 2017 - OCT 2018 3D IMAGE FUSION 3D IMAGE FUSION WHAT A 3D IMAGE IS? A cloud of 3D points collected from a 3D
lecture 19 Shadows - ray tracing - shadow mapping - ambient occlusion Interreflections
 lecture 19 Shadows - ray tracing - shadow mapping - ambient occlusion Interreflections In cinema and photography, shadows are important for setting mood and directing attention. Shadows indicate spatial
lecture 19 Shadows - ray tracing - shadow mapping - ambient occlusion Interreflections In cinema and photography, shadows are important for setting mood and directing attention. Shadows indicate spatial
There are many cues in monocular vision which suggests that vision in stereo starts very early from two similar 2D images. Lets see a few...
 STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
Lecture 10: Multi-view geometry
 Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
XPM 2D Transformations Week 2, Lecture 3
 CS 430/585 Computer Graphics I XPM 2D Transformations Week 2, Lecture 3 David Breen, William Regli and Maxim Peysakhov Geometric and Intelligent Computing Laboratory Department of Computer Science Drexel
CS 430/585 Computer Graphics I XPM 2D Transformations Week 2, Lecture 3 David Breen, William Regli and Maxim Peysakhov Geometric and Intelligent Computing Laboratory Department of Computer Science Drexel
DESIGN AND EVALUATION OF A PHOTOGRAMMETRIC 3D SURFACE SCANNER
 DESIGN AND EVALUATION OF A PHOTOGRAMMETRIC 3D SURFACE SCANNER A. Prokos 1, G. Karras 1, L. Grammatikopoulos 2 1 Department of Surveying, National Technical University of Athens (NTUA), GR-15780 Athens,
DESIGN AND EVALUATION OF A PHOTOGRAMMETRIC 3D SURFACE SCANNER A. Prokos 1, G. Karras 1, L. Grammatikopoulos 2 1 Department of Surveying, National Technical University of Athens (NTUA), GR-15780 Athens,
Epipolar Geometry Prof. D. Stricker. With slides from A. Zisserman, S. Lazebnik, Seitz
 Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
Scan Matching. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Registration D.A. Forsyth, UIUC
 Registration D.A. Forsyth, UIUC Registration Place a geometric model in correspondence with an image could be 2D or 3D model up to some transformations possibly up to deformation Applications very important
Registration D.A. Forsyth, UIUC Registration Place a geometric model in correspondence with an image could be 2D or 3D model up to some transformations possibly up to deformation Applications very important
Registration of Moving Surfaces by Means of One-Shot Laser Projection
 Registration of Moving Surfaces by Means of One-Shot Laser Projection Carles Matabosch 1,DavidFofi 2, Joaquim Salvi 1, and Josep Forest 1 1 University of Girona, Institut d Informatica i Aplicacions, Girona,
Registration of Moving Surfaces by Means of One-Shot Laser Projection Carles Matabosch 1,DavidFofi 2, Joaquim Salvi 1, and Josep Forest 1 1 University of Girona, Institut d Informatica i Aplicacions, Girona,