3D Deep Learning on Geometric Forms. Hao Su
|
|
|
- Erin Lawson
- 5 years ago
- Views:
Transcription



1 3D Deep Learning on Geometric Forms Hao Su
2 Many 3D representations are available Candidates: multi-view images depth map volumetric polygonal mesh point cloud primitive-based CAD models


3 3D representation Candidates: multi-view images depth map volumetric polygonal mesh point cloud Novel view image synthesis primitive-based CAD models [Su et al., ICCV15] [Dosovitskiy et al., ECCV16]
4 3D representation Candidates: multi-view images depth map volumetric polygonal mesh point cloud primitive-based CAD models

5 3D representation Candidates: multi-view images depth map volumetric polygonal mesh point cloud primitive-based CAD models
6 3D representation Candidates: multi-view images depth map volumetric polygonal mesh point cloud primitive-based CAD models


7 3D representation Candidates: multi-view images depth map volumetric polygonal mesh point cloud primitive-based CAD models

8 3D representation Candidates: multi-view images depth map volumetric polygonal mesh point cloud primitive-based CAD models a chair assembled by cuboids
9 Two groups of representations Candidates: Rasterized form (regular grids) Geometric form (irregular) multi-view images depth map volumetric polygonal mesh point cloud primitive-based CAD models

10 Extant 3D DNNs work on grid-like representations Candidates: multi-view images depth map volumetric polygonal mesh point cloud primitive-based CAD models
11 Ideally, a 3D representation should be Friendly to learning easily formulated as the input/output of a neural network fast forward-/backward- propagation etc.
12 Ideally, a 3D representation should be Friendly to learning easily formulated as the input/output of a neural network fast forward-/backward- propagation etc. Flexible can precisely model a great variety of shapes etc.
13 Ideally, a 3D representation should be Friendly to learning easily formulated as the output of a neural network fast forward-/backward- propagation etc. Flexible can precisely model a great variety of shapes etc. Geometrically manipulable for networks geometrically deformable, interpolable and extrapolable for networks convenient to impose structural constraints etc. Others
 Depth map Cannot model back")
14 The problem of grid representations Affability to learning Flexibility Geometric manipulability Multi-view images Volumetric occupancy Expensive to compute: O(N 3 ) Depth map Cannot model back side
15 Typical artifacts of volumetric reconstruction Missing or extra thin structures Volumes are hard for the network to rotate / deform / interpolate
16 Learn to analyze / generate Geometric Forms? Candidates: Rasterized form (regular grids) Geometric form (irregular) multi-view images depth map volumetric polygonal mesh point cloud primitive-based CAD models
17 Outline Motivation 3D point cloud / CAD model reconstruction 3D point cloud analysis, e.g., segmentation


18 3D point clouds A dual formulation of occupancy Flexibility Geometric manipulability Affability to learning Eulerian Prob. distribution Volumetric occupancy Lagrangian Particle filters Point clouds
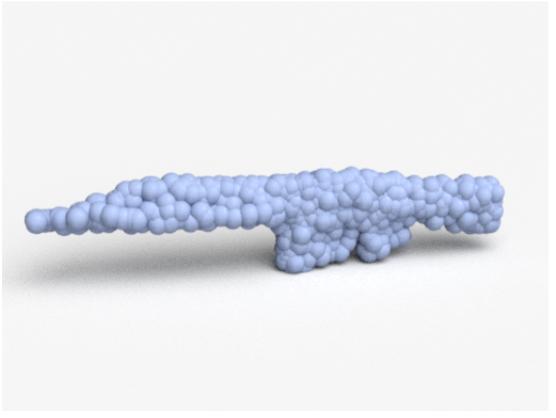
19 Result: 3D reconstruction from real Images Input Reconstructed 3D point cloud


20 Result: 3D reconstruction from real Images Input Reconstructed 3D point cloud
21 An end-to-end synthesis-for-learning system Image rendering sampling 8 >< >: (x 0 1,y 0 1,z 0 1) (x 0 2,y 0 2,z 0 2)... (x 0 n,y 0 n,z 0 n) 9 >= >; 3D model Groundtruth point cloud
22 An end-to-end learning system Image Deep Neural Network 8 >< >: Predicted set (x 1,y 1,z 1 ) (x 2,y 2,z 2 )... (x n,y n,z n ) 9 >= >; 8 >< >: (x 0 1,y 0 1,z 0 1) (x 0 2,y 0 2,z 0 2)... (x 0 n,y 0 n,z 0 n) 9 >= >; Groundtruth point cloud
23 An end-to-end learning system Image Predicted set Deep Neural Network 8 >< >: (x 1,y 1,z 1 ) (x 2,y 2,z 2 )... (x n,y n,z n ) 9 >= >; Point Set 8 >< >: (x 0 1,y 0 1,z 0 1) (x 0 2,y 0 2,z 0 2)... (x 0 n,y 0 n,z 0 n) 9 >= >; Distance Groundtruth point cloud
24 An end-to-end learning system Image Predicted set Deep Neural Network 8 >< >: (x 1,y 1,z 1 ) (x 2,y 2,z 2 )... (x n,y n,z n ) 9 >= >; Point Set 8 >< >: (x 0 1,y 0 1,z 0 1) (x 0 2,y 0 2,z 0 2)... (x 0 n,y 0 n,z 0 n) 9 >= >; Distance Groundtruth point cloud
25 Network architecture: Vanilla version Fully connected layer as predictor in standard classification network conv fully connected Encoder input point set Predictor shape embedding! "
26 Network architecture: Vanilla version Fully connected layer as predictor in standard classification network conv fully connected Encoder input point set Predictor & shape embedding! " Independently regress n*3 numbers from! " : # 3


27 Natural statistics of geometry Many objects, especially man-made objects, contain large smooth surfaces Deconvolution can generate locally smooth textures for images
28 Network architecture: Output from deconv branch Two branch version conv deconv fully connected set union input Encoder point set # ' =24*32=768 points # ( =256 points 3-channel map of XYZ coordinates Predictor
29 Network architecture: Output from deconv branch Two branch version conv deconv fully connected set union input Encoder point set # ' =24*32=768 points # ( =256 points 3-channel map of XYZ coordinates Predictor C = apple C1 C 2 C 1 2 R n 1 3 C 2 2 R n 2 3

30 Network architecture: Output from deconv branch Two branch version conv deconv fully connected set union input Encoder point set # ' =24*32=768 points # ( =256 points 3-channel map of XYZ coordinates Predictor
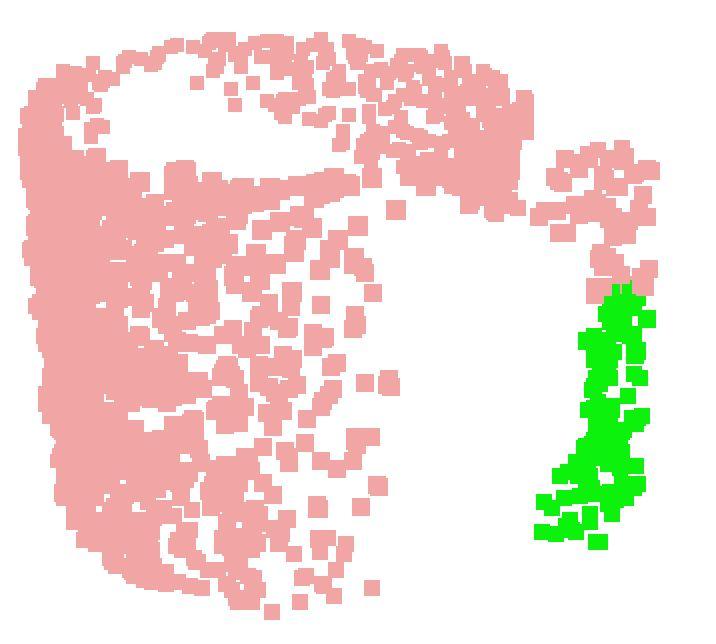
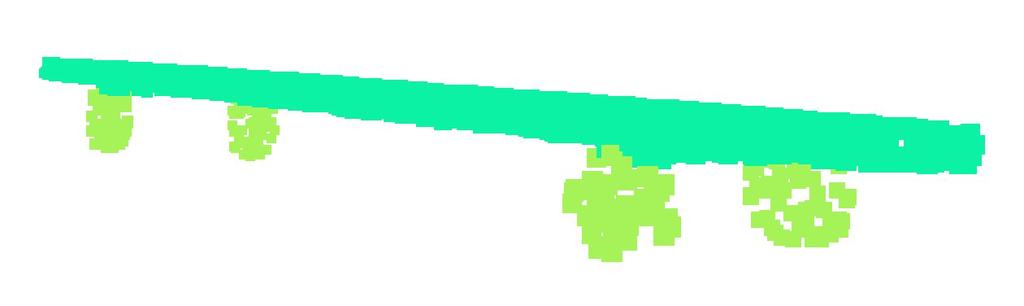
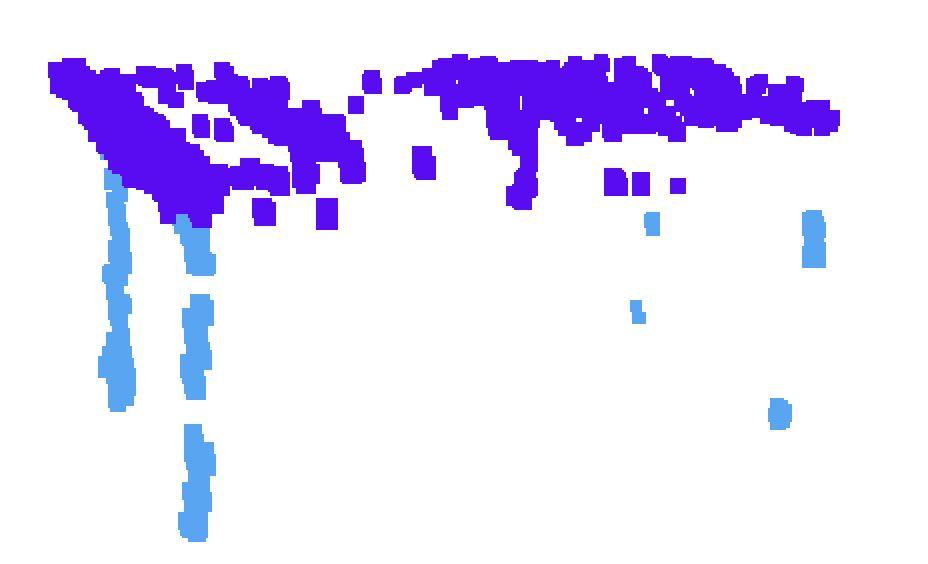
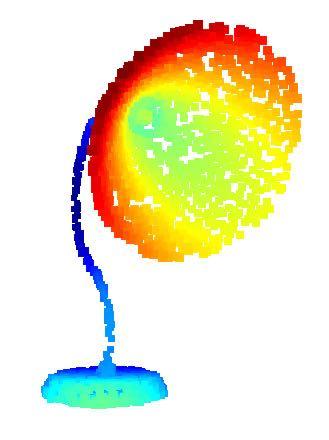
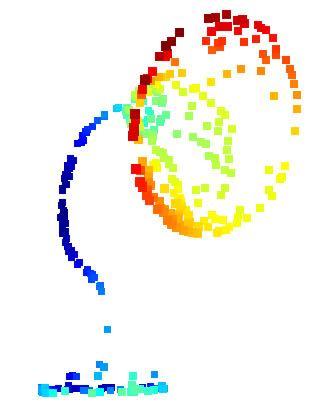
31 Network architecture: The role of two branches blue: deconv branch large, consistent, smooth structures red: fully-connected branch flexibly reconstruct intricate structures
32 An end-to-end learning system Deep Neural Network 8 >< >: Predicted set (x 1,y 1,z 1 ) (x 2,y 2,z 2 )... (x n,y n,z n ) 9 >= >; Point Set 8 >< >: (x 0 1,y 0 1,z 0 1) (x 0 2,y 0 2,z 0 2)... (x 0 n,y 0 n,z 0 n) 9 >= >; Loss Groundtruth point cloud
33 Distance metrics between point sets Given two sets of points, measure their discrepancy
34 Common distance metrics Worst case: Hausdorff distance (HD) Average case: Chamfer distance (CD) Optimal case: Earth Mover s distance (EMD)
35 Common distance metrics Worst case: Hausdorff distance (HD) d HD (S 1,S 2 ) = max{ max x i 2S 1 min y j 2S 2 kx i y j k, max y j 2S 2 min kx i y j k} x i 2S 1 A single farthest pair determines the distance. In other words, not robust to outliers!
36 Common distance metrics Worst case: Hausdorff distance (HD) Average case: Chamfer distance (CD) Average all the nearest neighbor distance by nearest neighbors
37 Common distance metrics Worst case: Hausdorff distance (HD) Average case: Chamfer distance (CD) Optimal case: Earth Mover s distance (EMD) Solves the optimal transportation (bipartite matching) problem!
38 Required properties of distance metrics Geometric requirement Induces a nice shape space In other words, a good metric should reflect the natural shape differences Computational requirement Defines a loss that is numerically easy to optimize
39 Required properties of distance metrics Geometric requirement Induces a nice shape space In other words, a good metric should reflect the natural shape differences Computational requirement Defines a loss that is numerically easy to optimize
40 How distance metric affects the learned geometry? A fundamental issue: there is always uncertainty in prediction By loss minimization, the network tends to predict a mean shape that averages out uncertainty in geometry
41 How distance metric affects the learned geometry? A fundamental issue: there is always uncertainty in prediction, due to limited network ability Insufficient training data inherent ambiguity of groundtruth for 2D-3D dimension lifting etc. By loss minimization, the network tends to predict a mean shape that averages out uncertainty in geometry
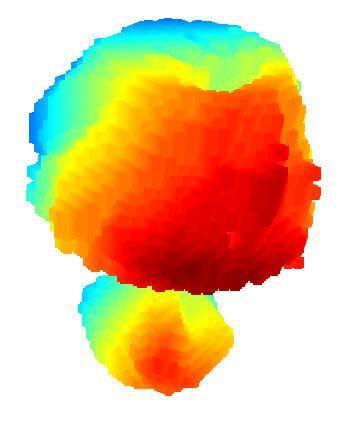
42 Mean shapes are affected by distance metric The mean shape carries characteristics of the distance metric x = argmin x E s S [d(x, s)] continuous hidden variable (radius) Input EMD mean Chamfer mean



![s)] continuous hidden](/docs-images/84/89278773/images/43-5.jpg "variable (radius)")

43 Mean shapes from distance metrics The mean shape carries characteristics of the distance metric x = argmin x E s S [d(x, s)] continuous hidden variable (radius) discrete hidden variable (add-on location) Input EMD mean Chamfer mean

44 Comparison of predictions by CD versus EMD Input Chamfer EMD

45 Lower prediction uncertainty, better mean shapes Can we reduce prediction uncertainty by factoring out the inherent ambiguity of groundtruth? Input Possible observations from a novel viewpoint

46 Predict multiple candidates Build a conditional shape sampler G(I,r) - ) is a random variable to perturb input - Can navigate the groundtruth distribution Can be trained by conditional VAE or our MoN loss

47 Multiple plausible 3D shape predictions 45 deg side view
48 Required properties of distance metrics Geometric requirement Induces a nice shape space In other words, a nice metric should reflect the natural shape difference Computational requirement Defines a loss function that is numerically easy to optimize
49 Computational requirement of metrics To be used as a loss function, the metric has to be Differentiable with respect to point locations Efficient to compute
50 Computational requirement of metrics Differentiable with respect to point location Chamfer distance Earth Mover s distance - Simple function of coordinates - In general positions, the correspondence is unique - With infinitesimal movement, the correspondence does not change Conclusion: differentiable almost everywhere
51 Computational requirement of metrics Efficient to compute Chamfer distance: trivially parallelizable on CUDA Earth Mover s distance: - Use coarse-to-fine approximation algorithm (Bertsekas, 1985) - Quite good approximation ratio - Parallelizable
")

52 Training Implemented in TensorFlow (python) Converge in ~2 days (the two branch version) Trained on 4 GPUs in parallel Training data rendered from 220K shapes in ShapeNet, covering ~2K categories
53 More Results

54 More visual results Good symmetry View 1 View 2 Input Prediction

55 More visual results Good details View 1 View 2 Input Prediction

56 Real-world results input observed view 90 Out of training categories input observed view 90
57 Comparison with state-of-the-art (volumetric)

58 Comparison with state-of-the-art (volumetric) Error metric: Chamfer Distance D-R2N2 (volumetric) Ours Ideal

59 Shape completion from depth map
60 How about learning to predict geometric forms? Candidates: Rasterized form (regular grids) Geometric form (irregular) multi-view images depth map volumetric polygonal mesh point cloud primitive-based CAD models
61 Primitive-based assembly We learn to predict a corresponding shape composed by primitives. It allows us to predict consistent compositions across objects.
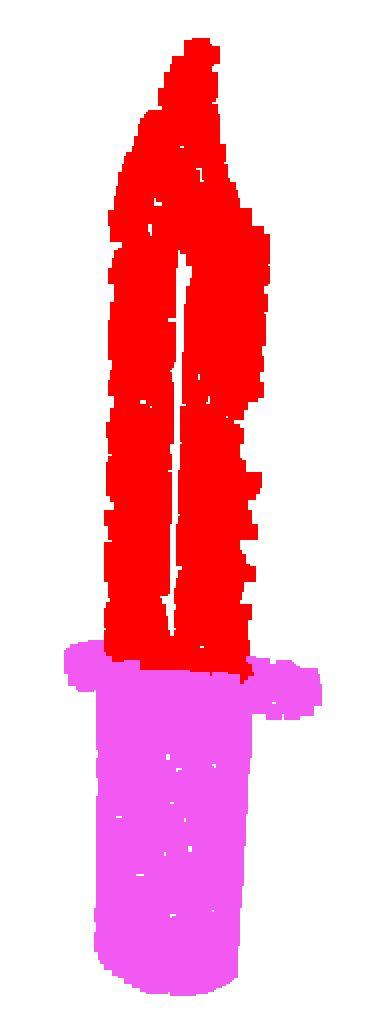
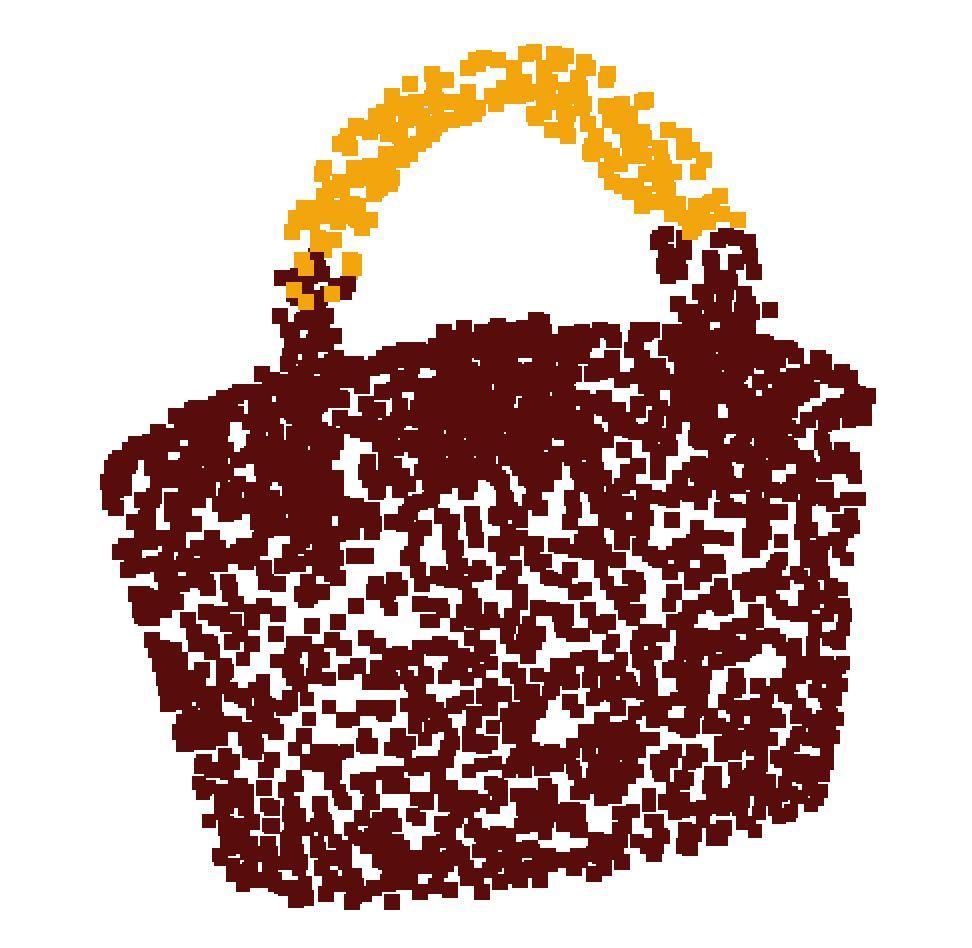
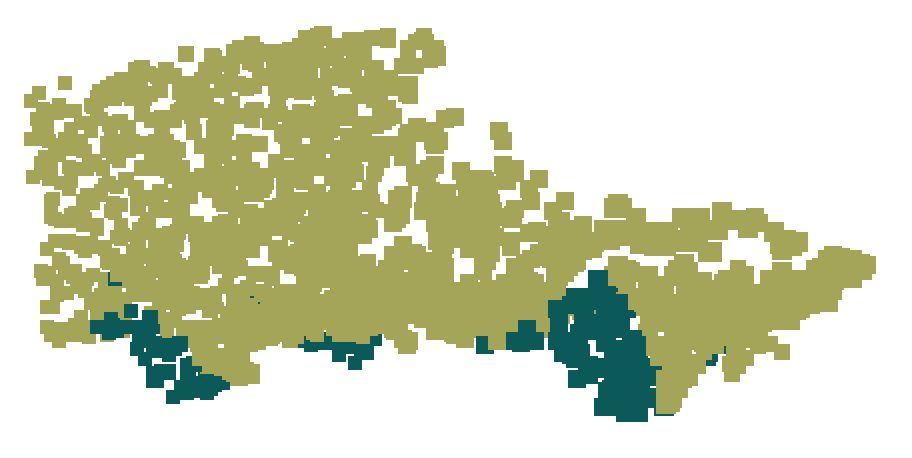
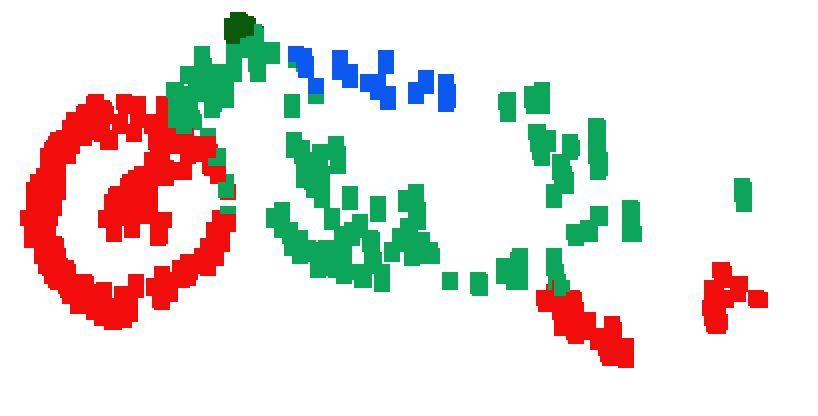
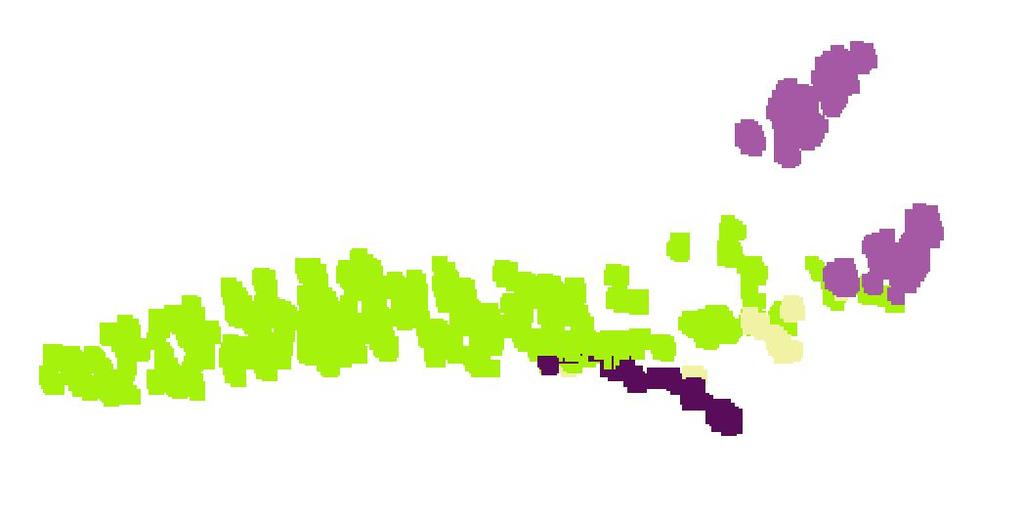
62 Unsupervised parsing Each point is colored according to the assigned primitive

63 Approach predict a high-dimensional point set Primitive parameters as a point: size, rotation, translation of M cuboids. Variable number of parts? We predict primitive existence probability


64 Loss function Loss Chamfer distance!




65 Consistent primitive configurations Primitive locations are consistent due to the smoothness of primitive prediction network
66 Unsupervised parsing Mean accuracy (face area) on Shape COSEG chairs.
67 Outline Motivation 3D point cloud / CAD model reconstruction 3D point cloud analysis


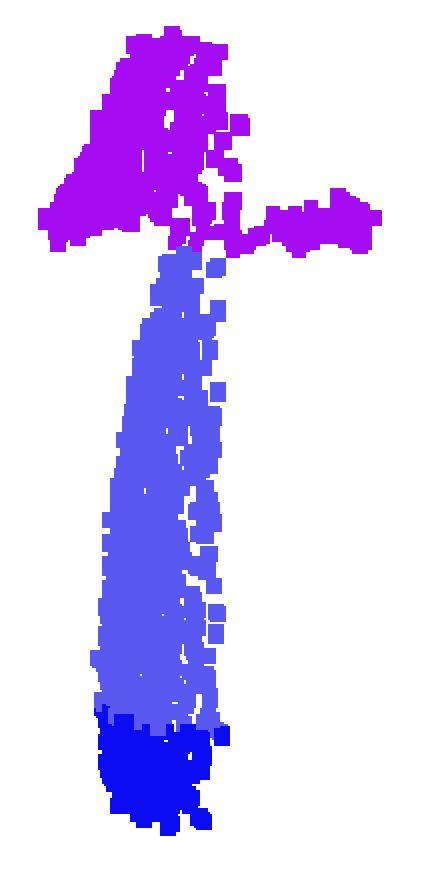
68 Deep Learning on Point Sets PointNet mug? table? car? Classification Part Segmentation Semantic Segmentation
 feature mlp (64,128,1024) transform shared nx64 nx64 shared nx1024 max pool 1024 global feature mlp (512,256,k) k output scores")
69 PointNet: deep net for unordered point set input Idea 1: Sort Idea 2: RNN Idea 3: Use symmetry function E.g. max, sum, weighted sum, L-norm, histogram, polynomial etc. Classification Network input points nx3 input transform nx3 mlp (64,64) feature mlp (64,128,1024) transform shared nx64 nx64 shared nx1024 max pool 1024 global feature mlp (512,256,k) k output scores point features T-Net 3x3 transform matrix multiply T-Net 64x64 transform matrix multiply n x 1088 Segmentation Network shared mlp (512,256) nx128 shared mlp (128,m) nxm output scores
70 Universal approximation to continuous set functions
71 Robustness to data corruption 100 Accuracy (%) PointNet VoxNet Missing Data Ratio (on ModelNet40 classification benchmark)



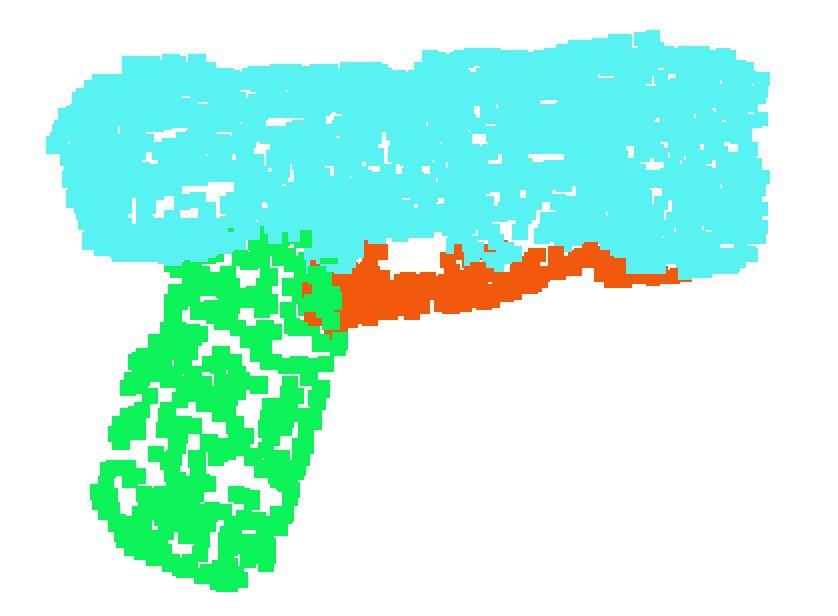



72 Partial object part segmentation table mug motorbike car lamp guitar back airplane seat Partial Inputs chair legs
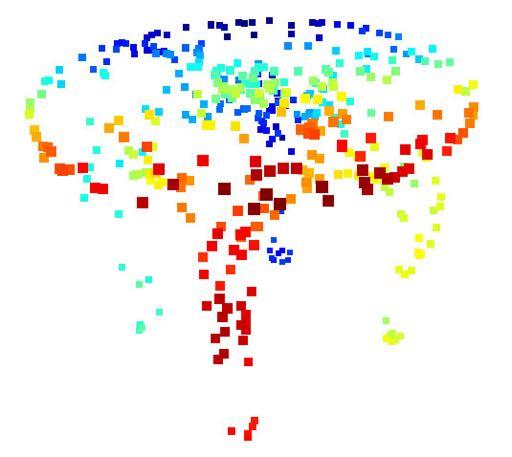
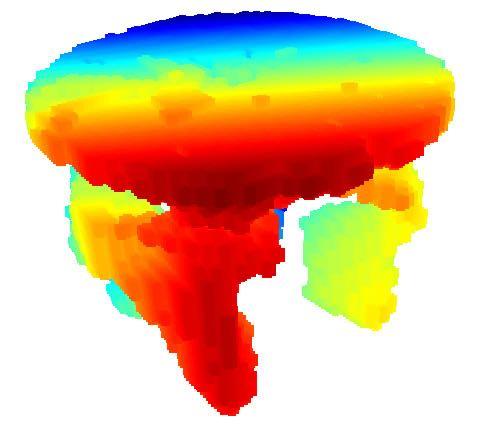




73 Visualization of what are learned, by reconstruction Critical Point Sets Original Shape A compact summarization of the input set. Saliency!
74 To sum up We explore geometric representations as input / output of networks A space rich of open problems and opportunities Papers: Hao Su*, Haoqiang Fan*, Leonidas Guibas, A Point Set Generation Network for 3D Object Reconstruction from a Single Image, arxiv Hao Su*, Charles Qi*, Kaichun Mo, Leonidas Guibas, PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation, arxiv Shubham Tulsiani, Hao Su, Leonidas Guibas, Alexei Efros, Jitendra Malik, Learning Shape Abstractions by Assembling Volumetric Primitives, arxiv Codes will be released soon!
75 Thank You!
Seeing the unseen. Data-driven 3D Understanding from Single Images. Hao Su
 Seeing the unseen Data-driven 3D Understanding from Single Images Hao Su Image world Shape world 3D perception from a single image Monocular vision a typical prey a typical predator Cited from https://en.wikipedia.org/wiki/binocular_vision
Seeing the unseen Data-driven 3D Understanding from Single Images Hao Su Image world Shape world 3D perception from a single image Monocular vision a typical prey a typical predator Cited from https://en.wikipedia.org/wiki/binocular_vision
CS468: 3D Deep Learning on Point Cloud Data. class label part label. Hao Su. image. May 10, 2017
 CS468: 3D Deep Learning on Point Cloud Data class label part label Hao Su image. May 10, 2017 Agenda Point cloud generation Point cloud analysis CVPR 17, Point Set Generation Pipeline render CVPR 17, Point
CS468: 3D Deep Learning on Point Cloud Data class label part label Hao Su image. May 10, 2017 Agenda Point cloud generation Point cloud analysis CVPR 17, Point Set Generation Pipeline render CVPR 17, Point
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation. Charles R. Qi* Hao Su* Kaichun Mo Leonidas J. Guibas
 PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation Charles R. Qi* Hao Su* Kaichun Mo Leonidas J. Guibas Big Data + Deep Representation Learning Robot Perception Augmented Reality
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation Charles R. Qi* Hao Su* Kaichun Mo Leonidas J. Guibas Big Data + Deep Representation Learning Robot Perception Augmented Reality
3D Deep Learning
 3D Deep Learning Tutorial@CVPR2017 Hao Su (UCSD) Leonidas Guibas (Stanford) Michael Bronstein (Università della Svizzera Italiana) Evangelos Kalogerakis (UMass) Jimei Yang (Adobe Research) Charles Qi (Stanford)
3D Deep Learning Tutorial@CVPR2017 Hao Su (UCSD) Leonidas Guibas (Stanford) Michael Bronstein (Università della Svizzera Italiana) Evangelos Kalogerakis (UMass) Jimei Yang (Adobe Research) Charles Qi (Stanford)
PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space
 PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space Sikai Zhong February 14, 2018 COMPUTER SCIENCE Table of contents 1. PointNet 2. PointNet++ 3. Experiments 1 PointNet Property
PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space Sikai Zhong February 14, 2018 COMPUTER SCIENCE Table of contents 1. PointNet 2. PointNet++ 3. Experiments 1 PointNet Property
Learning to generate 3D shapes
 Learning to generate 3D shapes Subhransu Maji College of Information and Computer Sciences University of Massachusetts, Amherst http://people.cs.umass.edu/smaji August 10, 2018 @ Caltech Creating 3D shapes
Learning to generate 3D shapes Subhransu Maji College of Information and Computer Sciences University of Massachusetts, Amherst http://people.cs.umass.edu/smaji August 10, 2018 @ Caltech Creating 3D shapes
POINT CLOUD DEEP LEARNING
 POINT CLOUD DEEP LEARNING Innfarn Yoo, 3/29/28 / 57 Introduction AGENDA Previous Work Method Result Conclusion 2 / 57 INTRODUCTION 3 / 57 2D OBJECT CLASSIFICATION Deep Learning for 2D Object Classification
POINT CLOUD DEEP LEARNING Innfarn Yoo, 3/29/28 / 57 Introduction AGENDA Previous Work Method Result Conclusion 2 / 57 INTRODUCTION 3 / 57 2D OBJECT CLASSIFICATION Deep Learning for 2D Object Classification
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material
 Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
3D Object Recognition and Scene Understanding from RGB-D Videos. Yu Xiang Postdoctoral Researcher University of Washington
 3D Object Recognition and Scene Understanding from RGB-D Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World
3D Object Recognition and Scene Understanding from RGB-D Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World
ECCV Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016
 ECCV 2016 Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016 Fundamental Question What is a good vector representation of an object? Something that can be easily predicted from 2D
ECCV 2016 Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016 Fundamental Question What is a good vector representation of an object? Something that can be easily predicted from 2D
Deep Learning on Point Sets for 3D Classification and Segmentation
 Deep Learning on Point Sets for 3D Classification and Segmentation Charles Ruizhongtai Qi Stanford University rqi@stanford.edu Abstract Point cloud is an important type of geometric data structure. Due
Deep Learning on Point Sets for 3D Classification and Segmentation Charles Ruizhongtai Qi Stanford University rqi@stanford.edu Abstract Point cloud is an important type of geometric data structure. Due
Supplementary A. Overview. C. Time and Space Complexity. B. Shape Retrieval. D. Permutation Invariant SOM. B.1. Dataset
 Supplementary A. Overview This supplementary document provides more technical details and experimental results to the main paper. Shape retrieval experiments are demonstrated with ShapeNet Core55 dataset
Supplementary A. Overview This supplementary document provides more technical details and experimental results to the main paper. Shape retrieval experiments are demonstrated with ShapeNet Core55 dataset
Perceiving the 3D World from Images and Videos. Yu Xiang Postdoctoral Researcher University of Washington
 Perceiving the 3D World from Images and Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World 3 Understand
Perceiving the 3D World from Images and Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World 3 Understand
Learning from 3D Data
 Learning from 3D Data Thomas Funkhouser Princeton University* * On sabbatical at Stanford and Google Disclaimer: I am talking about the work of these people Shuran Song Andy Zeng Fisher Yu Yinda Zhang
Learning from 3D Data Thomas Funkhouser Princeton University* * On sabbatical at Stanford and Google Disclaimer: I am talking about the work of these people Shuran Song Andy Zeng Fisher Yu Yinda Zhang
Using Faster-RCNN to Improve Shape Detection in LIDAR
 Using Faster-RCNN to Improve Shape Detection in LIDAR TJ Melanson Stanford University Stanford, CA 94305 melanson@stanford.edu Abstract In this paper, I propose a method for extracting objects from unordered
Using Faster-RCNN to Improve Shape Detection in LIDAR TJ Melanson Stanford University Stanford, CA 94305 melanson@stanford.edu Abstract In this paper, I propose a method for extracting objects from unordered
Photo-realistic Renderings for Machines Seong-heum Kim
 Photo-realistic Renderings for Machines 20105034 Seong-heum Kim CS580 Student Presentations 2016.04.28 Photo-realistic Renderings for Machines Scene radiances Model descriptions (Light, Shape, Material,
Photo-realistic Renderings for Machines 20105034 Seong-heum Kim CS580 Student Presentations 2016.04.28 Photo-realistic Renderings for Machines Scene radiances Model descriptions (Light, Shape, Material,
3D Shape Segmentation with Projective Convolutional Networks
 3D Shape Segmentation with Projective Convolutional Networks Evangelos Kalogerakis 1 Melinos Averkiou 2 Subhransu Maji 1 Siddhartha Chaudhuri 3 1 University of Massachusetts Amherst 2 University of Cyprus
3D Shape Segmentation with Projective Convolutional Networks Evangelos Kalogerakis 1 Melinos Averkiou 2 Subhransu Maji 1 Siddhartha Chaudhuri 3 1 University of Massachusetts Amherst 2 University of Cyprus
3D Shape Analysis with Multi-view Convolutional Networks. Evangelos Kalogerakis
 3D Shape Analysis with Multi-view Convolutional Networks Evangelos Kalogerakis 3D model repositories [3D Warehouse - video] 3D geometry acquisition [KinectFusion - video] 3D shapes come in various flavors
3D Shape Analysis with Multi-view Convolutional Networks Evangelos Kalogerakis 3D model repositories [3D Warehouse - video] 3D geometry acquisition [KinectFusion - video] 3D shapes come in various flavors
Three-Dimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients
 ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
An Empirical Study of Generative Adversarial Networks for Computer Vision Tasks
 An Empirical Study of Generative Adversarial Networks for Computer Vision Tasks Report for Undergraduate Project - CS396A Vinayak Tantia (Roll No: 14805) Guide: Prof Gaurav Sharma CSE, IIT Kanpur, India
An Empirical Study of Generative Adversarial Networks for Computer Vision Tasks Report for Undergraduate Project - CS396A Vinayak Tantia (Roll No: 14805) Guide: Prof Gaurav Sharma CSE, IIT Kanpur, India
Lecture notes: Object modeling
 Lecture notes: Object modeling One of the classic problems in computer vision is to construct a model of an object from an image of the object. An object model has the following general principles: Compact
Lecture notes: Object modeling One of the classic problems in computer vision is to construct a model of an object from an image of the object. An object model has the following general principles: Compact
Pose estimation using a variety of techniques
 Pose estimation using a variety of techniques Keegan Go Stanford University keegango@stanford.edu Abstract Vision is an integral part robotic systems a component that is needed for robots to interact robustly
Pose estimation using a variety of techniques Keegan Go Stanford University keegango@stanford.edu Abstract Vision is an integral part robotic systems a component that is needed for robots to interact robustly
Cross-domain Deep Encoding for 3D Voxels and 2D Images
 Cross-domain Deep Encoding for 3D Voxels and 2D Images Jingwei Ji Stanford University jingweij@stanford.edu Danyang Wang Stanford University danyangw@stanford.edu 1. Introduction 3D reconstruction is one
Cross-domain Deep Encoding for 3D Voxels and 2D Images Jingwei Ji Stanford University jingweij@stanford.edu Danyang Wang Stanford University danyangw@stanford.edu 1. Introduction 3D reconstruction is one
Paper Motivation. Fixed geometric structures of CNN models. CNNs are inherently limited to model geometric transformations
 Paper Motivation Fixed geometric structures of CNN models CNNs are inherently limited to model geometric transformations Higher-level features combine lower-level features at fixed positions as a weighted
Paper Motivation Fixed geometric structures of CNN models CNNs are inherently limited to model geometric transformations Higher-level features combine lower-level features at fixed positions as a weighted
L1 - Introduction. Contents. Introduction of CAD/CAM system Components of CAD/CAM systems Basic concepts of graphics programming
 L1 - Introduction Contents Introduction of CAD/CAM system Components of CAD/CAM systems Basic concepts of graphics programming 1 Definitions Computer-Aided Design (CAD) The technology concerned with the
L1 - Introduction Contents Introduction of CAD/CAM system Components of CAD/CAM systems Basic concepts of graphics programming 1 Definitions Computer-Aided Design (CAD) The technology concerned with the
AI Ukraine Point cloud labeling using machine learning
 AI Ukraine - 2017 Point cloud labeling using machine learning Andrii Babii apratster@gmail.com Data sources 1. LIDAR 2. 3D IR cameras 3. Generated from 2D sources 3D dataset: http://kos.informatik.uni-osnabrueck.de/3dscans/
AI Ukraine - 2017 Point cloud labeling using machine learning Andrii Babii apratster@gmail.com Data sources 1. LIDAR 2. 3D IR cameras 3. Generated from 2D sources 3D dataset: http://kos.informatik.uni-osnabrueck.de/3dscans/
Su et al. Shape Descriptors - III
 Su et al. Shape Descriptors - III Siddhartha Chaudhuri http://www.cse.iitb.ac.in/~cs749 Funkhouser; Feng, Liu, Gong Recap Global A shape descriptor is a set of numbers that describes a shape in a way that
Su et al. Shape Descriptors - III Siddhartha Chaudhuri http://www.cse.iitb.ac.in/~cs749 Funkhouser; Feng, Liu, Gong Recap Global A shape descriptor is a set of numbers that describes a shape in a way that
arxiv: v1 [cs.cv] 28 Nov 2018
![arxiv: v1 [cs.cv] 28 Nov 2018](/thumbs/91/104803963.jpg "arxiv: v1 [cs.cv] 28 Nov 2018") MeshNet: Mesh Neural Network for 3D Shape Representation Yutong Feng, 1 Yifan Feng, 2 Haoxuan You, 1 Xibin Zhao 1, Yue Gao 1 1 BNRist, KLISS, School of Software, Tsinghua University, China. 2 School of
MeshNet: Mesh Neural Network for 3D Shape Representation Yutong Feng, 1 Yifan Feng, 2 Haoxuan You, 1 Xibin Zhao 1, Yue Gao 1 1 BNRist, KLISS, School of Software, Tsinghua University, China. 2 School of
Learning Efficient Point Cloud Generation for Dense 3D Object Reconstruction
 Learning Efficient Point Cloud Generation for Dense 3D Object Reconstruction Chen-Hsuan Lin Chen Kong Simon Lucey The Robotics Institute Carnegie Mellon University chlin@cmu.edu, {chenk,slucey}@cs.cmu.edu
Learning Efficient Point Cloud Generation for Dense 3D Object Reconstruction Chen-Hsuan Lin Chen Kong Simon Lucey The Robotics Institute Carnegie Mellon University chlin@cmu.edu, {chenk,slucey}@cs.cmu.edu
MULTI-LEVEL 3D CONVOLUTIONAL NEURAL NETWORK FOR OBJECT RECOGNITION SAMBIT GHADAI XIAN LEE ADITYA BALU SOUMIK SARKAR ADARSH KRISHNAMURTHY
 MULTI-LEVEL 3D CONVOLUTIONAL NEURAL NETWORK FOR OBJECT RECOGNITION SAMBIT GHADAI XIAN LEE ADITYA BALU SOUMIK SARKAR ADARSH KRISHNAMURTHY Outline Object Recognition Multi-Level Volumetric Representations
MULTI-LEVEL 3D CONVOLUTIONAL NEURAL NETWORK FOR OBJECT RECOGNITION SAMBIT GHADAI XIAN LEE ADITYA BALU SOUMIK SARKAR ADARSH KRISHNAMURTHY Outline Object Recognition Multi-Level Volumetric Representations
arxiv: v1 [cs.cv] 21 Jun 2017
![arxiv: v1 [cs.cv] 21 Jun 2017](/thumbs/82/85530580.jpg "arxiv: v1 [cs.cv] 21 Jun 2017") Learning Efficient Point Cloud Generation for Dense 3D Object Reconstruction arxiv:1706.07036v1 [cs.cv] 21 Jun 2017 Chen-Hsuan Lin, Chen Kong, Simon Lucey The Robotics Institute Carnegie Mellon University
Learning Efficient Point Cloud Generation for Dense 3D Object Reconstruction arxiv:1706.07036v1 [cs.cv] 21 Jun 2017 Chen-Hsuan Lin, Chen Kong, Simon Lucey The Robotics Institute Carnegie Mellon University
Multi-view 3D Models from Single Images with a Convolutional Network
 Multi-view 3D Models from Single Images with a Convolutional Network Maxim Tatarchenko University of Freiburg Skoltech - 2nd Christmas Colloquium on Computer Vision Humans have prior knowledge about 3D
Multi-view 3D Models from Single Images with a Convolutional Network Maxim Tatarchenko University of Freiburg Skoltech - 2nd Christmas Colloquium on Computer Vision Humans have prior knowledge about 3D
3D model classification using convolutional neural network
 3D model classification using convolutional neural network JunYoung Gwak Stanford jgwak@cs.stanford.edu Abstract Our goal is to classify 3D models directly using convolutional neural network. Most of existing
3D model classification using convolutional neural network JunYoung Gwak Stanford jgwak@cs.stanford.edu Abstract Our goal is to classify 3D models directly using convolutional neural network. Most of existing
Neural Networks and Deep Learning
 Neural Networks and Deep Learning Example Learning Problem Example Learning Problem Celebrity Faces in the Wild Machine Learning Pipeline Raw data Feature extract. Feature computation Inference: prediction,
Neural Networks and Deep Learning Example Learning Problem Example Learning Problem Celebrity Faces in the Wild Machine Learning Pipeline Raw data Feature extract. Feature computation Inference: prediction,
Meshless Modeling, Animating, and Simulating Point-Based Geometry
 Meshless Modeling, Animating, and Simulating Point-Based Geometry Xiaohu Guo SUNY @ Stony Brook Email: xguo@cs.sunysb.edu http://www.cs.sunysb.edu/~xguo Graphics Primitives - Points The emergence of points
Meshless Modeling, Animating, and Simulating Point-Based Geometry Xiaohu Guo SUNY @ Stony Brook Email: xguo@cs.sunysb.edu http://www.cs.sunysb.edu/~xguo Graphics Primitives - Points The emergence of points
Preparation Meeting. Recent Advances in the Analysis of 3D Shapes. Emanuele Rodolà Matthias Vestner Thomas Windheuser Daniel Cremers
 Preparation Meeting Recent Advances in the Analysis of 3D Shapes Emanuele Rodolà Matthias Vestner Thomas Windheuser Daniel Cremers What You Will Learn in the Seminar Get an overview on state of the art
Preparation Meeting Recent Advances in the Analysis of 3D Shapes Emanuele Rodolà Matthias Vestner Thomas Windheuser Daniel Cremers What You Will Learn in the Seminar Get an overview on state of the art
LEARNING TO GENERATE CHAIRS WITH CONVOLUTIONAL NEURAL NETWORKS
 LEARNING TO GENERATE CHAIRS WITH CONVOLUTIONAL NEURAL NETWORKS Alexey Dosovitskiy, Jost Tobias Springenberg and Thomas Brox University of Freiburg Presented by: Shreyansh Daftry Visual Learning and Recognition
LEARNING TO GENERATE CHAIRS WITH CONVOLUTIONAL NEURAL NETWORKS Alexey Dosovitskiy, Jost Tobias Springenberg and Thomas Brox University of Freiburg Presented by: Shreyansh Daftry Visual Learning and Recognition
Announcements. Recognition. Recognition. Recognition. Recognition. Homework 3 is due May 18, 11:59 PM Reading: Computer Vision I CSE 152 Lecture 14
 Announcements Computer Vision I CSE 152 Lecture 14 Homework 3 is due May 18, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images Given
Announcements Computer Vision I CSE 152 Lecture 14 Homework 3 is due May 18, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images Given
Discovering Similarities in 3D Data
 Discovering Similarities in 3D Data Vladimir Kim, Tianqiang Liu, Sid Chaudhuri, Steve Diverdi, Wilmot Li, Niloy Mitra, Yaron Lipman, Thomas Funkhouser Motivation 3D data is widely available Medicine Mechanical
Discovering Similarities in 3D Data Vladimir Kim, Tianqiang Liu, Sid Chaudhuri, Steve Diverdi, Wilmot Li, Niloy Mitra, Yaron Lipman, Thomas Funkhouser Motivation 3D data is widely available Medicine Mechanical
GAL: Geometric Adversarial Loss for Single-View 3D-Object Reconstruction
 GAL: Geometric Adversarial Loss for Single-View 3D-Object Reconstruction Li Jiang 1, Shaoshuai Shi 1, Xiaojuan Qi 1, and Jiaya Jia 1,2 1 The Chinese University of Hong Kong 2 Tencent YouTu Lab {lijiang,
GAL: Geometric Adversarial Loss for Single-View 3D-Object Reconstruction Li Jiang 1, Shaoshuai Shi 1, Xiaojuan Qi 1, and Jiaya Jia 1,2 1 The Chinese University of Hong Kong 2 Tencent YouTu Lab {lijiang,
Edge and corner detection
 Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Point2Sequence: Learning the Shape Representation of 3D Point Clouds with an Attention-based Sequence to Sequence Network
 Point2Sequence: Learning the Shape Representation of 3D Point Clouds with an Attention-based Sequence to Sequence Network Xinhai Liu, Zhizhong Han,2, Yu-Shen Liu, Matthias Zwicker 2 School of Software,
Point2Sequence: Learning the Shape Representation of 3D Point Clouds with an Attention-based Sequence to Sequence Network Xinhai Liu, Zhizhong Han,2, Yu-Shen Liu, Matthias Zwicker 2 School of Software,
Classifying Depositional Environments in Satellite Images
 Classifying Depositional Environments in Satellite Images Alex Miltenberger and Rayan Kanfar Department of Geophysics School of Earth, Energy, and Environmental Sciences Stanford University 1 Introduction
Classifying Depositional Environments in Satellite Images Alex Miltenberger and Rayan Kanfar Department of Geophysics School of Earth, Energy, and Environmental Sciences Stanford University 1 Introduction
A New Shape Matching Measure for Nonlinear Distorted Object Recognition
 A New Shape Matching Measure for Nonlinear Distorted Object Recognition S. Srisuky, M. Tamsriy, R. Fooprateepsiri?, P. Sookavatanay and K. Sunaty Department of Computer Engineeringy, Department of Information
A New Shape Matching Measure for Nonlinear Distorted Object Recognition S. Srisuky, M. Tamsriy, R. Fooprateepsiri?, P. Sookavatanay and K. Sunaty Department of Computer Engineeringy, Department of Information
11 - Spatial Data Structures
 11 - Spatial Data Structures cknowledgement: Marco Tarini Types of Queries Graphic applications often require spatial queries Find the k points closer to a specific point p (k-nearest Neighbours, knn)
11 - Spatial Data Structures cknowledgement: Marco Tarini Types of Queries Graphic applications often require spatial queries Find the k points closer to a specific point p (k-nearest Neighbours, knn)
CAPNet: Continuous Approximation Projection For 3D Point Cloud Reconstruction Using 2D Supervision
 CAPNet: Continuous Approximation Projection For 3D Point Cloud Reconstruction Using 2D Supervision Navaneet K L *, Priyanka Mandikal * and R. Venkatesh Babu Video Analytics Lab, IISc, Bangalore, India
CAPNet: Continuous Approximation Projection For 3D Point Cloud Reconstruction Using 2D Supervision Navaneet K L *, Priyanka Mandikal * and R. Venkatesh Babu Video Analytics Lab, IISc, Bangalore, India
Shape Context Matching For Efficient OCR
 Matching For Efficient OCR May 14, 2012 Matching For Efficient OCR Table of contents 1 Motivation Background 2 What is a? Matching s Simliarity Measure 3 Matching s via Pyramid Matching Matching For Efficient
Matching For Efficient OCR May 14, 2012 Matching For Efficient OCR Table of contents 1 Motivation Background 2 What is a? Matching s Simliarity Measure 3 Matching s via Pyramid Matching Matching For Efficient
Matching and Recognition in 3D. Based on slides by Tom Funkhouser and Misha Kazhdan
 Matching and Recognition in 3D Based on slides by Tom Funkhouser and Misha Kazhdan From 2D to 3D: Some Things Easier No occlusion (but sometimes missing data instead) Segmenting objects often simpler From
Matching and Recognition in 3D Based on slides by Tom Funkhouser and Misha Kazhdan From 2D to 3D: Some Things Easier No occlusion (but sometimes missing data instead) Segmenting objects often simpler From
Surface Reconstruction. Gianpaolo Palma
 Surface Reconstruction Gianpaolo Palma Surface reconstruction Input Point cloud With or without normals Examples: multi-view stereo, union of range scan vertices Range scans Each scan is a triangular mesh
Surface Reconstruction Gianpaolo Palma Surface reconstruction Input Point cloud With or without normals Examples: multi-view stereo, union of range scan vertices Range scans Each scan is a triangular mesh
APPENDIX: DETAILS ABOUT THE DISTANCE TRANSFORM
 APPENDIX: DETAILS ABOUT THE DISTANCE TRANSFORM To speed up the closest-point distance computation, 3D Euclidean Distance Transform (DT) can be used in the proposed method. A DT is a uniform discretization
APPENDIX: DETAILS ABOUT THE DISTANCE TRANSFORM To speed up the closest-point distance computation, 3D Euclidean Distance Transform (DT) can be used in the proposed method. A DT is a uniform discretization
Akarsh Pokkunuru EECS Department Contractive Auto-Encoders: Explicit Invariance During Feature Extraction
 Akarsh Pokkunuru EECS Department 03-16-2017 Contractive Auto-Encoders: Explicit Invariance During Feature Extraction 1 AGENDA Introduction to Auto-encoders Types of Auto-encoders Analysis of different
Akarsh Pokkunuru EECS Department 03-16-2017 Contractive Auto-Encoders: Explicit Invariance During Feature Extraction 1 AGENDA Introduction to Auto-encoders Types of Auto-encoders Analysis of different
Direct Rendering. Direct Rendering Goals
 May 2, 2005 Goals General Goals Small memory footprint Fast rendering High-quality results identical to those of Saffron V1 using distance-based anti-aliasing and alignment zones Goals Specific Goals Avoid
May 2, 2005 Goals General Goals Small memory footprint Fast rendering High-quality results identical to those of Saffron V1 using distance-based anti-aliasing and alignment zones Goals Specific Goals Avoid
Octree Generating Networks: Efficient Convolutional Architectures for High-resolution 3D Outputs Supplementary Material
 Octree Generating Networks: Efficient Convolutional Architectures for High-resolution 3D Outputs Supplementary Material Peak memory usage, GB 10 1 0.1 0.01 OGN Quadratic Dense Cubic Iteration time, s 10
Octree Generating Networks: Efficient Convolutional Architectures for High-resolution 3D Outputs Supplementary Material Peak memory usage, GB 10 1 0.1 0.01 OGN Quadratic Dense Cubic Iteration time, s 10
Medial Scaffolds for 3D data modelling: status and challenges. Frederic Fol Leymarie
 Medial Scaffolds for 3D data modelling: status and challenges Frederic Fol Leymarie Outline Background Method and some algorithmic details Applications Shape representation: From the Medial Axis to the
Medial Scaffolds for 3D data modelling: status and challenges Frederic Fol Leymarie Outline Background Method and some algorithmic details Applications Shape representation: From the Medial Axis to the
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Prediction using Convolutional Neural Networks
 Overview Structured Prediction using Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Structured predictions for low level computer
Overview Structured Prediction using Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Structured predictions for low level computer
Modeling and Analyzing 3D Shapes using Clues from 2D Images. Minglun Gong Dept. of CS, Memorial Univ.
 Modeling and Analyzing 3D Shapes using Clues from 2D Images Minglun Gong Dept. of CS, Memorial Univ. Modeling Flowers from Images Reconstructing 3D flower petal shapes from a single image is difficult
Modeling and Analyzing 3D Shapes using Clues from 2D Images Minglun Gong Dept. of CS, Memorial Univ. Modeling Flowers from Images Reconstructing 3D flower petal shapes from a single image is difficult
Separating Objects and Clutter in Indoor Scenes
 Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
CAPNet: Continuous Approximation Projection For 3D Point Cloud Reconstruction Using 2D Supervision
 CAPNet: Continuous Approximation Projection For 3D Point Cloud Reconstruction Using 2D Supervision Navaneet K L *, Priyanka Mandikal *, Mayank Agarwal, and R. Venkatesh Babu Video Analytics Lab, CDS, Indian
CAPNet: Continuous Approximation Projection For 3D Point Cloud Reconstruction Using 2D Supervision Navaneet K L *, Priyanka Mandikal *, Mayank Agarwal, and R. Venkatesh Babu Video Analytics Lab, CDS, Indian
Imagining the Unseen: Stability-based Cuboid Arrangements for Scene Understanding
 : Stability-based Cuboid Arrangements for Scene Understanding Tianjia Shao* Aron Monszpart Youyi Zheng Bongjin Koo Weiwei Xu Kun Zhou * Niloy J. Mitra * Background A fundamental problem for single view
: Stability-based Cuboid Arrangements for Scene Understanding Tianjia Shao* Aron Monszpart Youyi Zheng Bongjin Koo Weiwei Xu Kun Zhou * Niloy J. Mitra * Background A fundamental problem for single view
Hybrid Rendering for Collaborative, Immersive Virtual Environments
 Hybrid Rendering for Collaborative, Immersive Virtual Environments Stephan Würmlin wuermlin@inf.ethz.ch Outline! Rendering techniques GBR, IBR and HR! From images to models! Novel view generation! Putting
Hybrid Rendering for Collaborative, Immersive Virtual Environments Stephan Würmlin wuermlin@inf.ethz.ch Outline! Rendering techniques GBR, IBR and HR! From images to models! Novel view generation! Putting
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material
 DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
Part-Based Models for Object Class Recognition Part 3
 High Level Computer Vision! Part-Based Models for Object Class Recognition Part 3 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de! http://www.d2.mpi-inf.mpg.de/cv ! State-of-the-Art
High Level Computer Vision! Part-Based Models for Object Class Recognition Part 3 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de! http://www.d2.mpi-inf.mpg.de/cv ! State-of-the-Art
Adaptive Point Cloud Rendering
 1 Adaptive Point Cloud Rendering Project Plan Final Group: May13-11 Christopher Jeffers Eric Jensen Joel Rausch Client: Siemens PLM Software Client Contact: Michael Carter Adviser: Simanta Mitra 4/29/13
1 Adaptive Point Cloud Rendering Project Plan Final Group: May13-11 Christopher Jeffers Eric Jensen Joel Rausch Client: Siemens PLM Software Client Contact: Michael Carter Adviser: Simanta Mitra 4/29/13
Depth Estimation Using Collection of Models
 Depth Estimation Using Collection of Models Karankumar Thakkar 1, Viral Borisagar 2 PG scholar 1, Assistant Professor 2 Computer Science & Engineering Department 1, 2 Government Engineering College, Sector
Depth Estimation Using Collection of Models Karankumar Thakkar 1, Viral Borisagar 2 PG scholar 1, Assistant Professor 2 Computer Science & Engineering Department 1, 2 Government Engineering College, Sector
ADAPTIVE FINITE ELEMENT
 Finite Element Methods In Linear Structural Mechanics Univ. Prof. Dr. Techn. G. MESCHKE SHORT PRESENTATION IN ADAPTIVE FINITE ELEMENT Abdullah ALSAHLY By Shorash MIRO Computational Engineering Ruhr Universität
Finite Element Methods In Linear Structural Mechanics Univ. Prof. Dr. Techn. G. MESCHKE SHORT PRESENTATION IN ADAPTIVE FINITE ELEMENT Abdullah ALSAHLY By Shorash MIRO Computational Engineering Ruhr Universität
Structure-oriented Networks of Shape Collections
 Structure-oriented Networks of Shape Collections Noa Fish 1 Oliver van Kaick 2 Amit Bermano 3 Daniel Cohen-Or 1 1 Tel Aviv University 2 Carleton University 3 Princeton University 1 pplementary material
Structure-oriented Networks of Shape Collections Noa Fish 1 Oliver van Kaick 2 Amit Bermano 3 Daniel Cohen-Or 1 1 Tel Aviv University 2 Carleton University 3 Princeton University 1 pplementary material
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
COMPUTER GRAPHICS COURSE. Rendering Pipelines
 COMPUTER GRAPHICS COURSE Rendering Pipelines Georgios Papaioannou - 2014 A Rendering Pipeline Rendering or Graphics Pipeline is the sequence of steps that we use to create the final image Many graphics/rendering
COMPUTER GRAPHICS COURSE Rendering Pipelines Georgios Papaioannou - 2014 A Rendering Pipeline Rendering or Graphics Pipeline is the sequence of steps that we use to create the final image Many graphics/rendering
LSTM and its variants for visual recognition. Xiaodan Liang Sun Yat-sen University
 LSTM and its variants for visual recognition Xiaodan Liang xdliang328@gmail.com Sun Yat-sen University Outline Context Modelling with CNN LSTM and its Variants LSTM Architecture Variants Application in
LSTM and its variants for visual recognition Xiaodan Liang xdliang328@gmail.com Sun Yat-sen University Outline Context Modelling with CNN LSTM and its Variants LSTM Architecture Variants Application in
arxiv: v1 [cs.cv] 30 Sep 2018
![arxiv: v1 [cs.cv] 30 Sep 2018](/thumbs/89/99613806.jpg "arxiv: v1 [cs.cv] 30 Sep 2018") 3D-PSRNet: Part Segmented 3D Point Cloud Reconstruction From a Single Image Priyanka Mandikal, Navaneet K L, and R. Venkatesh Babu arxiv:1810.00461v1 [cs.cv] 30 Sep 2018 Indian Institute of Science, Bangalore,
3D-PSRNet: Part Segmented 3D Point Cloud Reconstruction From a Single Image Priyanka Mandikal, Navaneet K L, and R. Venkatesh Babu arxiv:1810.00461v1 [cs.cv] 30 Sep 2018 Indian Institute of Science, Bangalore,
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
arxiv: v1 [cs.cv] 31 Mar 2016
![arxiv: v1 [cs.cv] 31 Mar 2016](/thumbs/92/108399479.jpg "arxiv: v1 [cs.cv] 31 Mar 2016") Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
arxiv: v1 [cs.cv] 10 Sep 2018
![arxiv: v1 [cs.cv] 10 Sep 2018](/thumbs/93/117973766.jpg "arxiv: v1 [cs.cv] 10 Sep 2018") Deep Single-View 3D Object Reconstruction with Visual Hull Embedding Hanqing Wang 1 Jiaolong Yang 2 Wei Liang 1 Xin Tong 2 1 Beijing Institute of Technology 2 Microsoft Research {hanqingwang,liangwei}@bit.edu.cn
Deep Single-View 3D Object Reconstruction with Visual Hull Embedding Hanqing Wang 1 Jiaolong Yang 2 Wei Liang 1 Xin Tong 2 1 Beijing Institute of Technology 2 Microsoft Research {hanqingwang,liangwei}@bit.edu.cn
Deep 3D Machine Learning for Reconstruction and Repair of 3D Surfaces
 Deep 3D Machine Learning for Reconstruction and Repair of 3D Surfaces TalkID 23152 This session will give the audience a quick overview of recent developments in the field of 3D surface analysis with deep
Deep 3D Machine Learning for Reconstruction and Repair of 3D Surfaces TalkID 23152 This session will give the audience a quick overview of recent developments in the field of 3D surface analysis with deep
Does the Brain do Inverse Graphics?
 Does the Brain do Inverse Graphics? Geoffrey Hinton, Alex Krizhevsky, Navdeep Jaitly, Tijmen Tieleman & Yichuan Tang Department of Computer Science University of Toronto The representation used by the
Does the Brain do Inverse Graphics? Geoffrey Hinton, Alex Krizhevsky, Navdeep Jaitly, Tijmen Tieleman & Yichuan Tang Department of Computer Science University of Toronto The representation used by the
Analysis and Synthesis of 3D Shape Families via Deep Learned Generative Models of Surfaces
 Analysis and Synthesis of 3D Shape Families via Deep Learned Generative Models of Surfaces Haibin Huang, Evangelos Kalogerakis, Benjamin Marlin University of Massachusetts Amherst Given an input 3D shape
Analysis and Synthesis of 3D Shape Families via Deep Learned Generative Models of Surfaces Haibin Huang, Evangelos Kalogerakis, Benjamin Marlin University of Massachusetts Amherst Given an input 3D shape
arxiv: v1 [cs.gr] 22 Sep 2017
![arxiv: v1 [cs.gr] 22 Sep 2017](/thumbs/75/72203215.jpg "arxiv: v1 [cs.gr] 22 Sep 2017") Hierarchical Detail Enhancing Mesh-Based Shape Generation with 3D Generative Adversarial Network arxiv:1709.07581v1 [cs.gr] 22 Sep 2017 Chiyu Max Jiang University of California Berkeley, CA 94720 chiyu.jiang@berkeley.edu
Hierarchical Detail Enhancing Mesh-Based Shape Generation with 3D Generative Adversarial Network arxiv:1709.07581v1 [cs.gr] 22 Sep 2017 Chiyu Max Jiang University of California Berkeley, CA 94720 chiyu.jiang@berkeley.edu
Urban Scene Segmentation, Recognition and Remodeling. Part III. Jinglu Wang 11/24/2016 ACCV 2016 TUTORIAL
 Part III Jinglu Wang Urban Scene Segmentation, Recognition and Remodeling 102 Outline Introduction Related work Approaches Conclusion and future work o o - - ) 11/7/16 103 Introduction Motivation Motivation
Part III Jinglu Wang Urban Scene Segmentation, Recognition and Remodeling 102 Outline Introduction Related work Approaches Conclusion and future work o o - - ) 11/7/16 103 Introduction Motivation Motivation
Scalar Visualization
 Scalar Visualization Visualizing scalar data Popular scalar visualization techniques Color mapping Contouring Height plots outline Recap of Chap 4: Visualization Pipeline 1. Data Importing 2. Data Filtering
Scalar Visualization Visualizing scalar data Popular scalar visualization techniques Color mapping Contouring Height plots outline Recap of Chap 4: Visualization Pipeline 1. Data Importing 2. Data Filtering
03 - Reconstruction. Acknowledgements: Olga Sorkine-Hornung. CSCI-GA Geometric Modeling - Spring 17 - Daniele Panozzo
 3 - Reconstruction Acknowledgements: Olga Sorkine-Hornung Geometry Acquisition Pipeline Scanning: results in range images Registration: bring all range images to one coordinate system Stitching/ reconstruction:
3 - Reconstruction Acknowledgements: Olga Sorkine-Hornung Geometry Acquisition Pipeline Scanning: results in range images Registration: bring all range images to one coordinate system Stitching/ reconstruction:
Computer Graphics Global Illumination
 Computer Graphics 2016 14. Global Illumination Hongxin Zhang State Key Lab of CAD&CG, Zhejiang University 2017-01-09 Course project - Tomorrow - 3 min presentation - 2 min demo Outline - Shadows - Radiosity
Computer Graphics 2016 14. Global Illumination Hongxin Zhang State Key Lab of CAD&CG, Zhejiang University 2017-01-09 Course project - Tomorrow - 3 min presentation - 2 min demo Outline - Shadows - Radiosity
3D Rasterization II COS 426
 3D Rasterization II COS 426 3D Rendering Pipeline (for direct illumination) 3D Primitives Modeling Transformation Lighting Viewing Transformation Projection Transformation Clipping Viewport Transformation
3D Rasterization II COS 426 3D Rendering Pipeline (for direct illumination) 3D Primitives Modeling Transformation Lighting Viewing Transformation Projection Transformation Clipping Viewport Transformation
Natural Language Processing CS 6320 Lecture 6 Neural Language Models. Instructor: Sanda Harabagiu
 Natural Language Processing CS 6320 Lecture 6 Neural Language Models Instructor: Sanda Harabagiu In this lecture We shall cover: Deep Neural Models for Natural Language Processing Introduce Feed Forward
Natural Language Processing CS 6320 Lecture 6 Neural Language Models Instructor: Sanda Harabagiu In this lecture We shall cover: Deep Neural Models for Natural Language Processing Introduce Feed Forward
CRF Based Point Cloud Segmentation Jonathan Nation
 CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018
 Qixing Huang August 29 th 2018") CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018 3D Vision Understanding geometric relations between images and the 3D world between images Obtaining 3D information
CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018 3D Vision Understanding geometric relations between images and the 3D world between images Obtaining 3D information
Path Planning. Marcello Restelli. Dipartimento di Elettronica e Informazione Politecnico di Milano tel:
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02 2399 3470 Path Planning Robotica for Computer Engineering students A.A. 2006/2007
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02 2399 3470 Path Planning Robotica for Computer Engineering students A.A. 2006/2007
From processing to learning on graphs
 From processing to learning on graphs Patrick Pérez Maths and Images in Paris IHP, 2 March 2017 Signals on graphs Natural graph: mesh, network, etc., related to a real structure, various signals can live
From processing to learning on graphs Patrick Pérez Maths and Images in Paris IHP, 2 March 2017 Signals on graphs Natural graph: mesh, network, etc., related to a real structure, various signals can live
Geometric Representations. Stelian Coros
 Geometric Representations Stelian Coros Geometric Representations Languages for describing shape Boundary representations Polygonal meshes Subdivision surfaces Implicit surfaces Volumetric models Parametric
Geometric Representations Stelian Coros Geometric Representations Languages for describing shape Boundary representations Polygonal meshes Subdivision surfaces Implicit surfaces Volumetric models Parametric
Discrete representations of geometric objects: Features, data structures and adequacy for dynamic simulation. Part I : Solid geometry
 Discrete representations of geometric objects: Features, data structures and adequacy for dynamic simulation. Surfaces Part I : Solid geometry hachar Fleishman Tel Aviv University David Levin Claudio T.
Discrete representations of geometric objects: Features, data structures and adequacy for dynamic simulation. Surfaces Part I : Solid geometry hachar Fleishman Tel Aviv University David Levin Claudio T.
Boundary Fragment Matching and Articulated Pose Under Occlusion. Nicholas R. Howe
 Boundary Fragment Matching and Articulated Pose Under Occlusion Nicholas R. Howe Low-Budget Motion Capture Constraints (informal/archived footage): Single camera No body markers Consequent Challenges:
Boundary Fragment Matching and Articulated Pose Under Occlusion Nicholas R. Howe Low-Budget Motion Capture Constraints (informal/archived footage): Single camera No body markers Consequent Challenges:
Semi-Supervised Hierarchical Models for 3D Human Pose Reconstruction
 Semi-Supervised Hierarchical Models for 3D Human Pose Reconstruction Atul Kanaujia, CBIM, Rutgers Cristian Sminchisescu, TTI-C Dimitris Metaxas,CBIM, Rutgers 3D Human Pose Inference Difficulties Towards
Semi-Supervised Hierarchical Models for 3D Human Pose Reconstruction Atul Kanaujia, CBIM, Rutgers Cristian Sminchisescu, TTI-C Dimitris Metaxas,CBIM, Rutgers 3D Human Pose Inference Difficulties Towards
Large Scale 3D Reconstruction (50 mins) Yasutaka Washington University in St. Louis
 Yasutaka Washington University in St. Louis") Large Scale 3D Reconstruction (50 mins) Yasutaka Furukawa @ Washington University in St. Louis Outline 1. Large scale MVS for organized photos (Aerial photos) 2. Large scale MVS for unorganized photos
Large Scale 3D Reconstruction (50 mins) Yasutaka Furukawa @ Washington University in St. Louis Outline 1. Large scale MVS for organized photos (Aerial photos) 2. Large scale MVS for unorganized photos
Computer Vision I - Appearance-based Matching and Projective Geometry
 Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 05/11/2015 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 05/11/2015 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Supplementary Material for Ensemble Diffusion for Retrieval
 Supplementary Material for Ensemble Diffusion for Retrieval Song Bai 1, Zhichao Zhou 1, Jingdong Wang, Xiang Bai 1, Longin Jan Latecki 3, Qi Tian 4 1 Huazhong University of Science and Technology, Microsoft
Supplementary Material for Ensemble Diffusion for Retrieval Song Bai 1, Zhichao Zhou 1, Jingdong Wang, Xiang Bai 1, Longin Jan Latecki 3, Qi Tian 4 1 Huazhong University of Science and Technology, Microsoft
arxiv: v1 [cs.cv] 27 Jan 2019
![arxiv: v1 [cs.cv] 27 Jan 2019](/thumbs/95/122752774.jpg "arxiv: v1 [cs.cv] 27 Jan 2019") : Euclidean Point Cloud Auto-Encoder and Sampler Edoardo Remelli 1 Pierre Baque 1 Pascal Fua 1 Abstract arxiv:1901.09394v1 [cs.cv] 27 Jan 2019 Most algorithms that rely on deep learning-based approaches
: Euclidean Point Cloud Auto-Encoder and Sampler Edoardo Remelli 1 Pierre Baque 1 Pascal Fua 1 Abstract arxiv:1901.09394v1 [cs.cv] 27 Jan 2019 Most algorithms that rely on deep learning-based approaches
Synthesis of Textures with Intricate Geometries using BTF and Large Number of Textured Micropolygons. Abstract. 2. Related studies. 1.
 Synthesis of Textures with Intricate Geometries using BTF and Large Number of Textured Micropolygons sub047 Abstract BTF has been studied extensively and much progress has been done for measurements, compression
Synthesis of Textures with Intricate Geometries using BTF and Large Number of Textured Micropolygons sub047 Abstract BTF has been studied extensively and much progress has been done for measurements, compression
Locally Weighted Least Squares Regression for Image Denoising, Reconstruction and Up-sampling
 Locally Weighted Least Squares Regression for Image Denoising, Reconstruction and Up-sampling Moritz Baecher May 15, 29 1 Introduction Edge-preserving smoothing and super-resolution are classic and important
Locally Weighted Least Squares Regression for Image Denoising, Reconstruction and Up-sampling Moritz Baecher May 15, 29 1 Introduction Edge-preserving smoothing and super-resolution are classic and important