Appearance Editing: Compensation Compliant Alterations to Physical Objects
|
|
|
- Barbra Harrison
- 5 years ago
- Views:
Transcription
1 Editing: Compensation Compliant Alterations to Physical Objects Daniel G. Aliaga Associate Professor of Purdue University
2 <slides removed>
3 Presentation Outline Previous work editing overview Formulations of compensation compliancy Solutions to improving/ensuring compliancy Additional tools to improve appearance editing Concluding thoughts and future work 29
4 Notation q i : surface point i n i : surface normal at q i A s (q i ): idealized surface albedo at q i under maximal projector illumination p j : projector j T(q i ): target appearance color at q i 30
5 Projector Light Radiance Availability Gamut of achievable colors depends on available light radiance at surface point q i Projector maximum illumination I max Projector-surface point visibility v ij Projector-surface point distance d ij Projector-surface point orientation (p j q i, n i ) Surface point albedo A s (q i ) L p q i = A s (q i ) P j=1 p j q i I max v ij n i p j q i 2 p j q i projector (p j, I max ) visible? (v ij ) d ij n i surface point (q i, A s q i ) 30
6 Method 1: Luminance Compliancy Simplest way to model compliancy is with a scalar value Luminance estimated by RGB color space intensity: I c (c R + c G + c[b])/3, or I c c R 2 + c G 2 + c B 2 Compensation compliant if the intensity of the target color at q i is less than or equal to the intensity of the available light radiance: I T q i I L p (q i ) I T(q i ) I L p (q i ) T(q i ) L p (q i ) Inaccuracy: does not model color s chrominance 31
7 Method 2: RGB Color Space Compliancy RGB channels encapsulate both a color s chrominance and luminance (in some intertwined way) Compensation compliant if each channel s target intensity is less than or equal the per channel available light radiance: T q i [R] L p q i [R] T q i [G] L p q i [G] T q i B L p q i B L p (q i )[G] T(q i )[R] T(q i )[B] L p (q i )[R] L p (q i )[B] T(q i )[G] T(q i ) L p (q i ) Inaccuracy: perceived chrominance not constant in each channel mixed in some intertwined way 32
8 Method 3: CIELAB Color Space Compliancy Accurate modeling of compensation compliancy must be able to precisely measure intensity at any given spectral wavelength or chrominance Lab space dissociates chrominance and luminance components L : lightness (a, b ): chrominance New function to compare luminance values at a given chrominance T q i L H i T q i a, T(q i )[b ] Generalize to a band to consider baseline illumination h i T q i a, T(q i )[b ] T q i L H i T q i a, T(q i )[b ] Incompliant colors Incompliant colors H L a a H Compliant colors Compliant colors Incompliant colors h Note: b omitted for simplicity 33 Compliancy Heightfield Band
9 Presentation Outline Previous work editing overview Formulations of compensation compliancy Solutions to improving/ensuring compliancy Additional tools to improve appearance editing Concluding thoughts and future work 34
10 Augmented AE Pipeline for Compliancy Acquisition & Calibration Light Transport Computation Editing Compensation Edited Scene Scene Projector Placement Modification Target Environment Light 35



11 Projector Placement Planning Goal: discover optimal projector positions to increase available light radiance to improve compliancy Sample each projector s position on imaginary sphere to find optimal combination Photo of Physical Object Photo of Edit Using 3 Projectors (abundant light) Photo of Edit Using Naïve Projector Location Photo of Edit Using Our Optimal Projector Location 36 [Law et al., IEEE Vis 2010]
12 Definition of Optimal Projector Placement Balance of compensation compliancy and light radiance efficiency Light radiance efficiency: low usage of projector illumination power Q k β = β c k + i=1 T(q i )δ i N C max compliancy term β: User specified importance weight c k : compliancy error for visible points + 1 β l k L max N i=1 T(q i )δ i : compliancy error for occluded points l k : average projector intensity value C max, L max : normalizing constants efficiency term 37
13 Placement Algorithm Observation: dense sampling of projector s positions on imaginary sphere is computationally expensive Solution: use iterative adaptive sampling routine θ 38 φ
14 Adaptive Projector Sampling Sparsely sample each projector s position across the specified θ and φ ranges θ 39 φ
15 Adaptive Projector Sampling Sparsely sample each projector s position across the specified θ and φ ranges Can specify ranges in θ and φ where projectors are prohibited θ Observer Viewing 39 φ
16 Adaptive Projector Sampling Select projector combination which yields optimal Q k value θ Observer Viewing 39 φ
17 Adaptive Projector Sampling Select projector combination which yields optimal Q k value Reduce next iteration s sampling range θ Observer Viewing 39 φ
18 Adaptive Projector Sampling Select projector combination which yields optimal Q k value Reduce next iteration s sampling range Sample next iteration (until a specified number of iterations) θ 39 φ

19 Synthetic Example 2 projector setup Target Edit Optimal Ad Hoc Projectors 40


20 Synthetic Example 2 projector setup Edit Compensation Compliancy Light Efficiency Ad Hoc Target not compliant compliant very compliant high light energy low light energy Optimal 40



21 Virtual Restoration Mexican vessels from Casas Grandes Region ( A.D.) Ad Hoc Projectors Optimized Projectors Photo of Original Vessels blurred text, inconsistent colors sharp text, consistent colors Photo of Virtually Restored Vessels blotchy blue color smooth blue color 41 Photo of Visualized Vessels
22 Virtual Restoration Mexican vessels from Casas Grandes Region ( A.D.) Photo of of Edit Edit with with Ad Optimized Hoc Projectors 41









23 California Map Original Map Temperature map visualization with annotations Desired Visualization Achieved Visualization Target Visualization Photo of Ad Hoc Projector Photo of Optimized Projector Ad Hoc Projector Optimized Projector 42
24 Augmented AE Pipeline for Compliancy Acquisition & Calibration Light Transport Computation Editing Compensation Edited Scene Scene Projector Placement Modification Target Environment Light 43

25 Modification Goal: modify colors of target appearance to decrease the amount of light radiance required for compliancy Use CIELAB color space Enables independent control over luminance and chrominance Easy to measure perceptual differences in colors with ΔE Photos of Edits 44 Photo of Physical Object Target Our Perceptually Similar Naïve Incompliant Luminance Reduced [Law et al., CGF 2011, IEEE VR 2012]
26 Perceptually-Based Goals Maintain the chrominance of target colors Maintain the color ratios of target colors Approximation to preserving color constancy Preserving color constancy suggests changes in illuminant, not object Keep loss of luminance to a minimum Bright appearances are desirable 45




27 Scene Deconstruction Target appearance is product of target appearance albedo and shading function Target Target Albedo Shading A patch groups a contiguous set of pixels sharing the same surface albedo color and the same target albedo color a d b c 2 1 (a,1) (a,2) (d,2) (b,1) (c,1) (c,2) Editing Patches 46 Physical Object Surface Patches Target Patches
28 Optimization Select one point r k to represent patch k Point should represent entire patch s compliancy behavior Point classification Compliant point colors Incompliant point colors Barely compliant point colors Incompliant color Barely compliant color L* Compliant color a* τ c Note: b omitted for simplicity 47
29 Optimization Use gradient descent to shift pixels closer to compliancy Patch A Patch B (patch color shifting only) Uses two types of equations: 1. Patch color equations move each individual patch color to a compliant color c k(m+1) = c km + s km 48
30 Optimization Use gradient descent to shift pixels closer to compliancy Constrain with color constancy to preserve perceptual similarity Patch A Patch B (patch color shifting considering ratios) Uses two types of equations: 1. Patch color equations move each individual patch color to a compliant color c k(m+1) = c km + s km 2. Patch ratio equations maintain the color ratios between patches w k1 k 2 s k1 m R k1 k 2 s k2 m = w k1 k 2 R k1 k 2 c k2 m c k1 m 48
31 Optimization Details Discourage change in lightness (L ) Encourage change in the yellow/blue axis (b ) over the red/green axis (a ) Human visual system believed to be less sensitive to shifts in blue/yellow Sun is yellow/white and sky is blue Change in yellow/blue more likely to be perceived as a change in the illuminant instead of a change in the surface 49
32 Perceptual Comparison As compared to reducing luminance (naïve approach) 1. Our method results in brighter scenes with smaller perceptual differences 2. Color constancy is preserved, so perceived differences are even closer than ΔE suggests Our Method Lum. Reduction Scene L* ΔE L* ΔE ped-checker ped-argyle pumpkin house vases Our compute time is Seconds to a few minutes for simple scenes (low number of patches) About one hour for complex scenes (high number of patches) 50




 (wrong color)")

33 Pedestal-Checker Photos of Edits Ideal Albedo Target Perceptually Similar Naïve Incompliant Luminance Reduced Chrominance Zoom-ins Comparison (against ideal) Luminance Comparison (against ideal) (wrong color) (dimmer) 51 Perceptually Similar Naïve Incompliant Perceptually Similar Luminance Reduced





34 Pedestal-Argyle Photos of Edits Physical Object Target Perceptually Similar Naïve Incompliant Luminance Reduced 52 ghosting dimmer
 (paler)")




35 House (Extreme Case) (paler) Physical Object Incompliant Target Photo of Naïve Incompliant Edit Zoom-in 53 Ideal Albedo Perceptually Similar Compliant Target Photo of Compliant Edit Zoom-in
36 Editing in Environment Light Advantages Additional light radiance helps achieve spectrally brighter colors Supports scenes with altered and not altered objects Disadvantage Spectrally dark colors now incompliant Use compliancy band to model incompliancy Insufficient projector light Excessive environment light (baseline illumination level too high) 54
37 Modification Augmentation Augment dark room framework with the following Use compliancy band Single photograph E to capture per-pixel environment light New radiometric calibration images captures contributions with both environment light (E) and projector light Use multiple representative points per patch 55


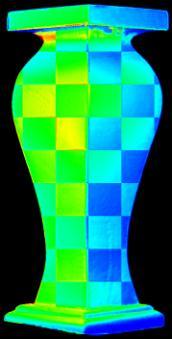
38 Jar with Isolines AE with isolines indicating height up the jar Object Under Environment Light Ideal Target Photo of Ideal Target in Dark Room Photo of Ideal Target in Lit Room Our Target Photo of Our Target In Lit Room 56







39 United States Map Visualization of areas at risk due to rising sea levels Ideal Target Photo of Ideal Target in Dark Room Map Under Environment Light Photograph of our Target in Lit Room 57 Our Target Photo of Our Target in Lit Room






40 Car Aerodynamics Car model augmented with aerodynamic lines Car Under Environment Light Zoom-in Ideal Target Photo of Ideal Target in Dark Room Error Zoom-in 58 Our Target Photo of Our Target in Lit Room Error
41 <slides removed>
Inverse Light Transport (and next Separation of Global and Direct Illumination)
") Inverse ight Transport (and next Separation of Global and Direct Illumination) CS434 Daniel G. Aliaga Department of Computer Science Purdue University Inverse ight Transport ight Transport Model transfer
Inverse ight Transport (and next Separation of Global and Direct Illumination) CS434 Daniel G. Aliaga Department of Computer Science Purdue University Inverse ight Transport ight Transport Model transfer
CS635 Spring Department of Computer Science Purdue University
 Inverse Light Transport CS635 Spring 200 Daniel G Aliaga Daniel G. Aliaga Department of Computer Science Purdue University Inverse Light Transport Light Transport Model transfer of light from source (e.g.,
Inverse Light Transport CS635 Spring 200 Daniel G Aliaga Daniel G. Aliaga Department of Computer Science Purdue University Inverse Light Transport Light Transport Model transfer of light from source (e.g.,
Lecture 1 Image Formation.
 Lecture 1 Image Formation peimt@bit.edu.cn 1 Part 3 Color 2 Color v The light coming out of sources or reflected from surfaces has more or less energy at different wavelengths v The visual system responds
Lecture 1 Image Formation peimt@bit.edu.cn 1 Part 3 Color 2 Color v The light coming out of sources or reflected from surfaces has more or less energy at different wavelengths v The visual system responds
CSE 167: Lecture #7: Color and Shading. Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2011
 CSE 167: Introduction to Computer Graphics Lecture #7: Color and Shading Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2011 Announcements Homework project #3 due this Friday,
CSE 167: Introduction to Computer Graphics Lecture #7: Color and Shading Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2011 Announcements Homework project #3 due this Friday,
Colour Reading: Chapter 6. Black body radiators
 Colour Reading: Chapter 6 Light is produced in different amounts at different wavelengths by each light source Light is differentially reflected at each wavelength, which gives objects their natural colours
Colour Reading: Chapter 6 Light is produced in different amounts at different wavelengths by each light source Light is differentially reflected at each wavelength, which gives objects their natural colours
Photometric Stereo.
 Photometric Stereo Photometric Stereo v.s.. Structure from Shading [1] Photometric stereo is a technique in computer vision for estimating the surface normals of objects by observing that object under
Photometric Stereo Photometric Stereo v.s.. Structure from Shading [1] Photometric stereo is a technique in computer vision for estimating the surface normals of objects by observing that object under
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Light & Perception Announcements Quiz on Tuesday Project 3 code due Monday, April 17, by 11:59pm artifact due Wednesday, April 19, by 11:59pm Can we determine shape
CS5670: Computer Vision Noah Snavely Light & Perception Announcements Quiz on Tuesday Project 3 code due Monday, April 17, by 11:59pm artifact due Wednesday, April 19, by 11:59pm Can we determine shape
Introduction to color science
 Introduction to color science Trichromacy Spectral matching functions CIE XYZ color system xy-chromaticity diagram Color gamut Color temperature Color balancing algorithms Digital Image Processing: Bernd
Introduction to color science Trichromacy Spectral matching functions CIE XYZ color system xy-chromaticity diagram Color gamut Color temperature Color balancing algorithms Digital Image Processing: Bernd
Why does a visual system need color? Color. Why does a visual system need color? (an incomplete list ) Lecture outline. Reading: Optional reading:
 Lecture outline. Reading: Optional reading:") Today Color Why does a visual system need color? Reading: Chapter 6, Optional reading: Chapter 4 of Wandell, Foundations of Vision, Sinauer, 1995 has a good treatment of this. Feb. 17, 2005 MIT 6.869 Prof.
Today Color Why does a visual system need color? Reading: Chapter 6, Optional reading: Chapter 4 of Wandell, Foundations of Vision, Sinauer, 1995 has a good treatment of this. Feb. 17, 2005 MIT 6.869 Prof.
Color. Reading: Optional reading: Chapter 6, Forsyth & Ponce. Chapter 4 of Wandell, Foundations of Vision, Sinauer, 1995 has a good treatment of this.
 Today Color Reading: Chapter 6, Forsyth & Ponce Optional reading: Chapter 4 of Wandell, Foundations of Vision, Sinauer, 1995 has a good treatment of this. Feb. 17, 2005 MIT 6.869 Prof. Freeman Why does
Today Color Reading: Chapter 6, Forsyth & Ponce Optional reading: Chapter 4 of Wandell, Foundations of Vision, Sinauer, 1995 has a good treatment of this. Feb. 17, 2005 MIT 6.869 Prof. Freeman Why does
CSE 167: Introduction to Computer Graphics Lecture #6: Colors. Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2013
 CSE 167: Introduction to Computer Graphics Lecture #6: Colors Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2013 Announcements Homework project #3 due this Friday, October 18
CSE 167: Introduction to Computer Graphics Lecture #6: Colors Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2013 Announcements Homework project #3 due this Friday, October 18
Global Illumination. Frank Dellaert Some slides by Jim Rehg, Philip Dutre
 Global Illumination Frank Dellaert Some slides by Jim Rehg, Philip Dutre Color and Radiometry What is color? What is Color? A perceptual attribute of objects and scenes constructed by the visual system
Global Illumination Frank Dellaert Some slides by Jim Rehg, Philip Dutre Color and Radiometry What is color? What is Color? A perceptual attribute of objects and scenes constructed by the visual system
Illumination and Reflectance
 COMP 546 Lecture 12 Illumination and Reflectance Tues. Feb. 20, 2018 1 Illumination and Reflectance Shading Brightness versus Lightness Color constancy Shading on a sunny day N(x) L N L Lambert s (cosine)
COMP 546 Lecture 12 Illumination and Reflectance Tues. Feb. 20, 2018 1 Illumination and Reflectance Shading Brightness versus Lightness Color constancy Shading on a sunny day N(x) L N L Lambert s (cosine)
Computer Vision 2. SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung. Computer Vision 2 Dr. Benjamin Guthier
 Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 3. HIGH DYNAMIC RANGE Computer Vision 2 Dr. Benjamin Guthier Pixel Value Content of this
Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 3. HIGH DYNAMIC RANGE Computer Vision 2 Dr. Benjamin Guthier Pixel Value Content of this
IMAGE PROCESSING >FILTERS AND EDGE DETECTION FOR COLOR IMAGES UTRECHT UNIVERSITY RONALD POPPE
 IMAGE PROCESSING >FILTERS AND EDGE DETECTION FOR COLOR IMAGES UTRECHT UNIVERSITY RONALD POPPE OUTLINE Filters for color images Edge detection for color images Canny edge detection FILTERS FOR COLOR IMAGES
IMAGE PROCESSING >FILTERS AND EDGE DETECTION FOR COLOR IMAGES UTRECHT UNIVERSITY RONALD POPPE OUTLINE Filters for color images Edge detection for color images Canny edge detection FILTERS FOR COLOR IMAGES
Siggraph Course 2017 Path Tracing in Production Part 1 Manuka: Weta Digital's Spectral Renderer
 Siggraph Course 2017 Path Tracing in Production Part 1 Manuka: Weta Digital's Spectral Renderer Johannes Hanika, Weta Digital 1 Motivation Weta Digital is a VFX house we care about matching plate a lot
Siggraph Course 2017 Path Tracing in Production Part 1 Manuka: Weta Digital's Spectral Renderer Johannes Hanika, Weta Digital 1 Motivation Weta Digital is a VFX house we care about matching plate a lot
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 02 130124 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Basics Image Formation Image Processing 3 Intelligent
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 02 130124 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Basics Image Formation Image Processing 3 Intelligent
Projecting Restorations in Real-Time for Real-World Objects
 Projecting Restorations in Real-Time for Real-World Objects Alvin J. Law, Daniel G. Aliaga, Yu Hong Yeung, Purdue University, U.S.A. Richard McCoy, Indianapolis Museum of Art, U.S.A. Amy McKune, Eiteljorg
Projecting Restorations in Real-Time for Real-World Objects Alvin J. Law, Daniel G. Aliaga, Yu Hong Yeung, Purdue University, U.S.A. Richard McCoy, Indianapolis Museum of Art, U.S.A. Amy McKune, Eiteljorg
Color. Computational Photography MIT Feb. 14, 2006 Bill Freeman and Fredo Durand
 Color Computational Photography MIT Feb. 14, 2006 Bill Freeman and Fredo Durand Why does a visual system need color? http://www.hobbylinc.com/gr/pll/pll5019.jpg Why does a visual system need color? (an
Color Computational Photography MIT Feb. 14, 2006 Bill Freeman and Fredo Durand Why does a visual system need color? http://www.hobbylinc.com/gr/pll/pll5019.jpg Why does a visual system need color? (an
Computer Graphics. Illumination and Shading
 Rendering Pipeline modelling of geometry transformation into world coordinates placement of cameras and light sources transformation into camera coordinates backface culling projection clipping w.r.t.
Rendering Pipeline modelling of geometry transformation into world coordinates placement of cameras and light sources transformation into camera coordinates backface culling projection clipping w.r.t.
A Survey of Light Source Detection Methods
 A Survey of Light Source Detection Methods Nathan Funk University of Alberta Mini-Project for CMPUT 603 November 30, 2003 Abstract This paper provides an overview of the most prominent techniques for light
A Survey of Light Source Detection Methods Nathan Funk University of Alberta Mini-Project for CMPUT 603 November 30, 2003 Abstract This paper provides an overview of the most prominent techniques for light
CPSC / Illumination and Shading
 CPSC 599.64 / 601.64 Rendering Pipeline usually in one step modelling of geometry transformation into world coordinate system placement of cameras and light sources transformation into camera coordinate
CPSC 599.64 / 601.64 Rendering Pipeline usually in one step modelling of geometry transformation into world coordinate system placement of cameras and light sources transformation into camera coordinate
Lighting and Shading Computer Graphics I Lecture 7. Light Sources Phong Illumination Model Normal Vectors [Angel, Ch
 15-462 Computer Graphics I Lecture 7 Lighting and Shading February 12, 2002 Frank Pfenning Carnegie Mellon University http://www.cs.cmu.edu/~fp/courses/graphics/ Light Sources Phong Illumination Model
15-462 Computer Graphics I Lecture 7 Lighting and Shading February 12, 2002 Frank Pfenning Carnegie Mellon University http://www.cs.cmu.edu/~fp/courses/graphics/ Light Sources Phong Illumination Model
Illumination and Shading
 Illumination and Shading Illumination (Lighting)! Model the interaction of light with surface points to determine their final color and brightness! The illumination can be computed either at vertices or
Illumination and Shading Illumination (Lighting)! Model the interaction of light with surface points to determine their final color and brightness! The illumination can be computed either at vertices or
Light Transport CS434. Daniel G. Aliaga Department of Computer Science Purdue University
 Light Transport CS434 Daniel G. Aliaga Department of Computer Science Purdue University Topics Local and Global Illumination Models Helmholtz Reciprocity Dual Photography/Light Transport (in Real-World)
Light Transport CS434 Daniel G. Aliaga Department of Computer Science Purdue University Topics Local and Global Illumination Models Helmholtz Reciprocity Dual Photography/Light Transport (in Real-World)
Peripheral drift illusion
 Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Today. Global illumination. Shading. Interactive applications. Rendering pipeline. Computergrafik. Shading Introduction Local shading models
 Computergrafik Matthias Zwicker Universität Bern Herbst 2009 Today Introduction Local shading models Light sources strategies Compute interaction of light with surfaces Requires simulation of physics Global
Computergrafik Matthias Zwicker Universität Bern Herbst 2009 Today Introduction Local shading models Light sources strategies Compute interaction of light with surfaces Requires simulation of physics Global
CS770/870 Spring 2017 Color and Shading
 Preview CS770/870 Spring 2017 Color and Shading Related material Cunningham: Ch 5 Hill and Kelley: Ch. 8 Angel 5e: 6.1-6.8 Angel 6e: 5.1-5.5 Making the scene more realistic Color models representing the
Preview CS770/870 Spring 2017 Color and Shading Related material Cunningham: Ch 5 Hill and Kelley: Ch. 8 Angel 5e: 6.1-6.8 Angel 6e: 5.1-5.5 Making the scene more realistic Color models representing the
Homework #1. Displays, Alpha Compositing, Image Processing, Affine Transformations, Hierarchical Modeling
 Computer Graphics Instructor: Brian Curless CSE 457 Spring 2014 Homework #1 Displays, Alpha Compositing, Image Processing, Affine Transformations, Hierarchical Modeling Assigned: Saturday, April th Due:
Computer Graphics Instructor: Brian Curless CSE 457 Spring 2014 Homework #1 Displays, Alpha Compositing, Image Processing, Affine Transformations, Hierarchical Modeling Assigned: Saturday, April th Due:
Starting this chapter
 Computer Vision 5. Source, Shadow, Shading Department of Computer Engineering Jin-Ho Choi 05, April, 2012. 1/40 Starting this chapter The basic radiometric properties of various light sources Develop models
Computer Vision 5. Source, Shadow, Shading Department of Computer Engineering Jin-Ho Choi 05, April, 2012. 1/40 Starting this chapter The basic radiometric properties of various light sources Develop models
Image-Based Modeling and Rendering
 Traditional Computer Graphics Image-Based Modeling and Rendering Thomas Funkhouser Princeton University COS 426 Guest Lecture Spring 2003 How would you model and render this scene? (Jensen) How about this
Traditional Computer Graphics Image-Based Modeling and Rendering Thomas Funkhouser Princeton University COS 426 Guest Lecture Spring 2003 How would you model and render this scene? (Jensen) How about this
CS635 Spring Department of Computer Science Purdue University
 Color and Perception CS635 Spring 2010 Daniel G Aliaga Daniel G. Aliaga Department of Computer Science Purdue University Elements of Color Perception 2 Elements of Color Physics: Illumination Electromagnetic
Color and Perception CS635 Spring 2010 Daniel G Aliaga Daniel G. Aliaga Department of Computer Science Purdue University Elements of Color Perception 2 Elements of Color Physics: Illumination Electromagnetic
Announcements. Lighting. Camera s sensor. HW1 has been posted See links on web page for readings on color. Intro Computer Vision.
 Announcements HW1 has been posted See links on web page for readings on color. Introduction to Computer Vision CSE 152 Lecture 6 Deviations from the lens model Deviations from this ideal are aberrations
Announcements HW1 has been posted See links on web page for readings on color. Introduction to Computer Vision CSE 152 Lecture 6 Deviations from the lens model Deviations from this ideal are aberrations
Lecture 12 Color model and color image processing
 Lecture 12 Color model and color image processing Color fundamentals Color models Pseudo color image Full color image processing Color fundamental The color that humans perceived in an object are determined
Lecture 12 Color model and color image processing Color fundamentals Color models Pseudo color image Full color image processing Color fundamental The color that humans perceived in an object are determined
CSE 681 Illumination and Phong Shading
 CSE 681 Illumination and Phong Shading Physics tells us What is Light? We don t see objects, we see light reflected off of objects Light is a particle and a wave The frequency of light What is Color? Our
CSE 681 Illumination and Phong Shading Physics tells us What is Light? We don t see objects, we see light reflected off of objects Light is a particle and a wave The frequency of light What is Color? Our
Projector Placement Planning for High Quality Visualizations on Real-World Colored Objects
 Projector Placement Planning for High Quality Visualizations on Real-World Colored Objects Alvin J. Law, Daniel G. Aliaga, Member, IEEE, and Aditi Majumder, Member, IEEE Abstract Many visualization applications
Projector Placement Planning for High Quality Visualizations on Real-World Colored Objects Alvin J. Law, Daniel G. Aliaga, Member, IEEE, and Aditi Majumder, Member, IEEE Abstract Many visualization applications
CSE 167: Introduction to Computer Graphics Lecture #6: Lights. Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2016
 CSE 167: Introduction to Computer Graphics Lecture #6: Lights Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2016 Announcements Thursday in class: midterm #1 Closed book Material
CSE 167: Introduction to Computer Graphics Lecture #6: Lights Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2016 Announcements Thursday in class: midterm #1 Closed book Material
Shadow detection and removal from a single image
 Shadow detection and removal from a single image Corina BLAJOVICI, Babes-Bolyai University, Romania Peter Jozsef KISS, University of Pannonia, Hungary Zoltan BONUS, Obuda University, Hungary Laszlo VARGA,
Shadow detection and removal from a single image Corina BLAJOVICI, Babes-Bolyai University, Romania Peter Jozsef KISS, University of Pannonia, Hungary Zoltan BONUS, Obuda University, Hungary Laszlo VARGA,
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 20: Light, reflectance and photometric stereo Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Properties
CS6670: Computer Vision Noah Snavely Lecture 20: Light, reflectance and photometric stereo Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Properties
Today. Global illumination. Shading. Interactive applications. Rendering pipeline. Computergrafik. Shading Introduction Local shading models
 Computergrafik Thomas Buchberger, Matthias Zwicker Universität Bern Herbst 2008 Today Introduction Local shading models Light sources strategies Compute interaction of light with surfaces Requires simulation
Computergrafik Thomas Buchberger, Matthias Zwicker Universität Bern Herbst 2008 Today Introduction Local shading models Light sources strategies Compute interaction of light with surfaces Requires simulation
ON-SCREEN DISPLAY (OSD) GUIDE FOR PRO-T890 HD CAMERA
 GUIDE FOR PRO-T890 HD CAMERA") ON-SCREEN DISPLAY (OSD) GUIDE FOR PRO-T890 HD CAMERA EN CONTENTS CONTENTS...2 INTRODUCTION...3 OPERATING THE OSD...4 MAIN MENU...5 OUTPUT MODE...7 EXPOSURE...8 SPECIAL...9 SPECIAL - DPC...10 ADJUST...11
ON-SCREEN DISPLAY (OSD) GUIDE FOR PRO-T890 HD CAMERA EN CONTENTS CONTENTS...2 INTRODUCTION...3 OPERATING THE OSD...4 MAIN MENU...5 OUTPUT MODE...7 EXPOSURE...8 SPECIAL...9 SPECIAL - DPC...10 ADJUST...11
Assignment 4: Seamless Editing
 Assignment 4: Seamless Editing - EE Affiliate I. INTRODUCTION This assignment discusses and eventually implements the techniques of seamless cloning as detailed in the research paper [1]. First, a summary
Assignment 4: Seamless Editing - EE Affiliate I. INTRODUCTION This assignment discusses and eventually implements the techniques of seamless cloning as detailed in the research paper [1]. First, a summary
Photo-realistic Renderings for Machines Seong-heum Kim
 Photo-realistic Renderings for Machines 20105034 Seong-heum Kim CS580 Student Presentations 2016.04.28 Photo-realistic Renderings for Machines Scene radiances Model descriptions (Light, Shape, Material,
Photo-realistic Renderings for Machines 20105034 Seong-heum Kim CS580 Student Presentations 2016.04.28 Photo-realistic Renderings for Machines Scene radiances Model descriptions (Light, Shape, Material,
CMSC427 Shading Intro. Credit: slides from Dr. Zwicker
 CMSC427 Shading Intro Credit: slides from Dr. Zwicker 2 Today Shading Introduction Radiometry & BRDFs Local shading models Light sources Shading strategies Shading Compute interaction of light with surfaces
CMSC427 Shading Intro Credit: slides from Dr. Zwicker 2 Today Shading Introduction Radiometry & BRDFs Local shading models Light sources Shading strategies Shading Compute interaction of light with surfaces
A New Image Based Ligthing Method: Practical Shadow-Based Light Reconstruction
 A New Image Based Ligthing Method: Practical Shadow-Based Light Reconstruction Jaemin Lee and Ergun Akleman Visualization Sciences Program Texas A&M University Abstract In this paper we present a practical
A New Image Based Ligthing Method: Practical Shadow-Based Light Reconstruction Jaemin Lee and Ergun Akleman Visualization Sciences Program Texas A&M University Abstract In this paper we present a practical
Homework #1. Displays, Image Processing, Affine Transformations, Hierarchical Modeling
 Computer Graphics Instructor: Brian Curless CSE 457 Spring 215 Homework #1 Displays, Image Processing, Affine Transformations, Hierarchical Modeling Assigned: Thursday, April 9 th Due: Thursday, April
Computer Graphics Instructor: Brian Curless CSE 457 Spring 215 Homework #1 Displays, Image Processing, Affine Transformations, Hierarchical Modeling Assigned: Thursday, April 9 th Due: Thursday, April
The Gain setting for Landsat 7 (High or Low Gain) depends on: Sensor Calibration - Application. the surface cover types of the earth and the sun angle
 depends on: Sensor Calibration - Application. the surface cover types of the earth and the sun angle") Sensor Calibration - Application Station Identifier ASN Scene Center atitude 34.840 (34 3'0.64"N) Day Night DAY Scene Center ongitude 33.03270 (33 0'7.72"E) WRS Path WRS Row 76 036 Corner Upper eft atitude
Sensor Calibration - Application Station Identifier ASN Scene Center atitude 34.840 (34 3'0.64"N) Day Night DAY Scene Center ongitude 33.03270 (33 0'7.72"E) WRS Path WRS Row 76 036 Corner Upper eft atitude
Efficient Nonlinear Image Processing Algorithms
 Efficient Nonlinear Image Processing Algorithms SANJIT K. MITRA Department of Electrical & Computer Engineering University of California Santa Barbara, California Outline Introduction Quadratic Volterra
Efficient Nonlinear Image Processing Algorithms SANJIT K. MITRA Department of Electrical & Computer Engineering University of California Santa Barbara, California Outline Introduction Quadratic Volterra
Lecture #13. Point (pixel) transformations. Neighborhood processing. Color segmentation
 transformations. Neighborhood processing. Color segmentation") Lecture #13 Point (pixel) transformations Color modification Color slicing Device independent color Color balancing Neighborhood processing Smoothing Sharpening Color segmentation Color Transformations
Lecture #13 Point (pixel) transformations Color modification Color slicing Device independent color Color balancing Neighborhood processing Smoothing Sharpening Color segmentation Color Transformations
Hiding a Second Appearance in a Physical Relief Surface
 Hiding a Second Appearance in a Physical Relief Surface Yi-Liu Chao and Daniel G. Aliaga Department of Computer Science, Purdue University, West Lafayette, Indiana, USA {chao1, aliaga}@cs.purdue.edu Abstract.
Hiding a Second Appearance in a Physical Relief Surface Yi-Liu Chao and Daniel G. Aliaga Department of Computer Science, Purdue University, West Lafayette, Indiana, USA {chao1, aliaga}@cs.purdue.edu Abstract.
CPSC 314 LIGHTING AND SHADING
 CPSC 314 LIGHTING AND SHADING UGRAD.CS.UBC.CA/~CS314 slide credits: Mikhail Bessmeltsev et al 1 THE RENDERING PIPELINE Vertices and attributes Vertex Shader Modelview transform Per-vertex attributes Vertex
CPSC 314 LIGHTING AND SHADING UGRAD.CS.UBC.CA/~CS314 slide credits: Mikhail Bessmeltsev et al 1 THE RENDERING PIPELINE Vertices and attributes Vertex Shader Modelview transform Per-vertex attributes Vertex
Hyperspectral Remote Sensing
 Hyperspectral Remote Sensing Multi-spectral: Several comparatively wide spectral bands Hyperspectral: Many (could be hundreds) very narrow spectral bands GEOG 4110/5100 30 AVIRIS: Airborne Visible/Infrared
Hyperspectral Remote Sensing Multi-spectral: Several comparatively wide spectral bands Hyperspectral: Many (could be hundreds) very narrow spectral bands GEOG 4110/5100 30 AVIRIS: Airborne Visible/Infrared
this is processed giving us: perceived color that we actually experience and base judgments upon.
 color we have been using r, g, b.. why what is a color? can we get all colors this way? how does wavelength fit in here, what part is physics, what part is physiology can i use r, g, b for simulation of
color we have been using r, g, b.. why what is a color? can we get all colors this way? how does wavelength fit in here, what part is physics, what part is physiology can i use r, g, b for simulation of
Soft shadows. Steve Marschner Cornell University CS 569 Spring 2008, 21 February
 Soft shadows Steve Marschner Cornell University CS 569 Spring 2008, 21 February Soft shadows are what we normally see in the real world. If you are near a bare halogen bulb, a stage spotlight, or other
Soft shadows Steve Marschner Cornell University CS 569 Spring 2008, 21 February Soft shadows are what we normally see in the real world. If you are near a bare halogen bulb, a stage spotlight, or other
High Dynamic Range Imaging.
 High Dynamic Range Imaging High Dynamic Range [3] In photography, dynamic range (DR) is measured in exposure value (EV) differences or stops, between the brightest and darkest parts of the image that show
High Dynamic Range Imaging High Dynamic Range [3] In photography, dynamic range (DR) is measured in exposure value (EV) differences or stops, between the brightest and darkest parts of the image that show
Applying Synthetic Images to Learning Grasping Orientation from Single Monocular Images
 Applying Synthetic Images to Learning Grasping Orientation from Single Monocular Images 1 Introduction - Steve Chuang and Eric Shan - Determining object orientation in images is a well-established topic
Applying Synthetic Images to Learning Grasping Orientation from Single Monocular Images 1 Introduction - Steve Chuang and Eric Shan - Determining object orientation in images is a well-established topic
Photometric Stereo. Lighting and Photometric Stereo. Computer Vision I. Last lecture in a nutshell BRDF. CSE252A Lecture 7
 Lighting and Photometric Stereo Photometric Stereo HW will be on web later today CSE5A Lecture 7 Radiometry of thin lenses δa Last lecture in a nutshell δa δa'cosα δacos β δω = = ( z' / cosα ) ( z / cosα
Lighting and Photometric Stereo Photometric Stereo HW will be on web later today CSE5A Lecture 7 Radiometry of thin lenses δa Last lecture in a nutshell δa δa'cosα δacos β δω = = ( z' / cosα ) ( z / cosα
IASI spectral calibration monitoring on MetOp-A and MetOp-B
 IASI spectral calibration monitoring on MetOp-A and MetOp-B E. Jacquette (1), B. Tournier (2), E. Péquignot (1), J. Donnadille (2), D. Jouglet (1), V. Lonjou (1), J. Chinaud (1), C. Baque (3), L. Buffet
IASI spectral calibration monitoring on MetOp-A and MetOp-B E. Jacquette (1), B. Tournier (2), E. Péquignot (1), J. Donnadille (2), D. Jouglet (1), V. Lonjou (1), J. Chinaud (1), C. Baque (3), L. Buffet
Motion Estimation. There are three main types (or applications) of motion estimation:
 of motion estimation:") Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting
 Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
(Sample) Final Exam with brief answers
 Final Exam with brief answers") Name: Perm #: (Sample) Final Exam with brief answers CS/ECE 181B Intro to Computer Vision March 24, 2017 noon 3:00 pm This is a closed-book test. There are also a few pages of equations, etc. included
Name: Perm #: (Sample) Final Exam with brief answers CS/ECE 181B Intro to Computer Vision March 24, 2017 noon 3:00 pm This is a closed-book test. There are also a few pages of equations, etc. included
Local invariant features
 Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Bilevel Sparse Coding
 Adobe Research 345 Park Ave, San Jose, CA Mar 15, 2013 Outline 1 2 The learning model The learning algorithm 3 4 Sparse Modeling Many types of sensory data, e.g., images and audio, are in high-dimensional
Adobe Research 345 Park Ave, San Jose, CA Mar 15, 2013 Outline 1 2 The learning model The learning algorithm 3 4 Sparse Modeling Many types of sensory data, e.g., images and audio, are in high-dimensional
Shape from shading. Surface brightness and Surface Orientation --> Reflectance map READING: Nalwa Chapter 5. BKP Horn, Chapter 10.
 Shape from shading Surface brightness and Surface Orientation --> Reflectance map READING: Nalwa Chapter 5. BKP Horn, Chapter 10. May 2004 SFS 1 Shading produces a compelling perception of 3-D shape. One
Shape from shading Surface brightness and Surface Orientation --> Reflectance map READING: Nalwa Chapter 5. BKP Horn, Chapter 10. May 2004 SFS 1 Shading produces a compelling perception of 3-D shape. One
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Capturing light. Source: A. Efros
 Capturing light Source: A. Efros Review Pinhole projection models What are vanishing points and vanishing lines? What is orthographic projection? How can we approximate orthographic projection? Lenses
Capturing light Source: A. Efros Review Pinhole projection models What are vanishing points and vanishing lines? What is orthographic projection? How can we approximate orthographic projection? Lenses
S2 MPC Data Quality Report Ref. S2-PDGS-MPC-DQR
 S2 MPC Data Quality Report Ref. S2-PDGS-MPC-DQR 2/13 Authors Table Name Company Responsibility Date Signature Written by S. Clerc & MPC Team ACRI/Argans Technical Manager 2015-11-30 Verified by O. Devignot
S2 MPC Data Quality Report Ref. S2-PDGS-MPC-DQR 2/13 Authors Table Name Company Responsibility Date Signature Written by S. Clerc & MPC Team ACRI/Argans Technical Manager 2015-11-30 Verified by O. Devignot
Visualisatie BMT. Rendering. Arjan Kok
 Visualisatie BMT Rendering Arjan Kok a.j.f.kok@tue.nl 1 Lecture overview Color Rendering Illumination 2 Visualization pipeline Raw Data Data Enrichment/Enhancement Derived Data Visualization Mapping Abstract
Visualisatie BMT Rendering Arjan Kok a.j.f.kok@tue.nl 1 Lecture overview Color Rendering Illumination 2 Visualization pipeline Raw Data Data Enrichment/Enhancement Derived Data Visualization Mapping Abstract
CS 428: Fall Introduction to. Raytracing. Andrew Nealen, Rutgers, /18/2009 1
 CS 428: Fall 2009 Introduction to Computer Graphics Raytracing 11/18/2009 1 Forward ray tracing From the light sources Simulate light transport one ray at a time Rays start from lights + bounce around
CS 428: Fall 2009 Introduction to Computer Graphics Raytracing 11/18/2009 1 Forward ray tracing From the light sources Simulate light transport one ray at a time Rays start from lights + bounce around
CS 563 Advanced Topics in Computer Graphics Film and Image Pipeline (Ch. 8) Physically Based Rendering by Travis Grant.
 Physically Based Rendering by Travis Grant.") CS 563 Advanced Topics in Computer Graphics Film and Image Pipeline (Ch. 8) Physically Based Rendering by Travis Grant grant_travis@emc.com Basic Challenge: Film and Image Pipeline PBRT s output (EXR)
CS 563 Advanced Topics in Computer Graphics Film and Image Pipeline (Ch. 8) Physically Based Rendering by Travis Grant grant_travis@emc.com Basic Challenge: Film and Image Pipeline PBRT s output (EXR)
Image Acquisition Image Digitization Spatial domain Intensity domain Image Characteristics
 Image Acquisition Image Digitization Spatial domain Intensity domain Image Characteristics 1 What is an Image? An image is a projection of a 3D scene into a 2D projection plane. An image can be defined
Image Acquisition Image Digitization Spatial domain Intensity domain Image Characteristics 1 What is an Image? An image is a projection of a 3D scene into a 2D projection plane. An image can be defined
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 21: Light, reflectance and photometric stereo Announcements Final projects Midterm reports due November 24 (next Tuesday) by 11:59pm (upload to CMS) State the
CS6670: Computer Vision Noah Snavely Lecture 21: Light, reflectance and photometric stereo Announcements Final projects Midterm reports due November 24 (next Tuesday) by 11:59pm (upload to CMS) State the
An Algorithm to Determine the Chromaticity Under Non-uniform Illuminant
 An Algorithm to Determine the Chromaticity Under Non-uniform Illuminant Sivalogeswaran Ratnasingam and Steve Collins Department of Engineering Science, University of Oxford, OX1 3PJ, Oxford, United Kingdom
An Algorithm to Determine the Chromaticity Under Non-uniform Illuminant Sivalogeswaran Ratnasingam and Steve Collins Department of Engineering Science, University of Oxford, OX1 3PJ, Oxford, United Kingdom
Computer Graphics. Illumination and Shading
 () Illumination and Shading Dr. Ayman Eldeib Lighting So given a 3-D triangle and a 3-D viewpoint, we can set the right pixels But what color should those pixels be? If we re attempting to create a realistic
() Illumination and Shading Dr. Ayman Eldeib Lighting So given a 3-D triangle and a 3-D viewpoint, we can set the right pixels But what color should those pixels be? If we re attempting to create a realistic
MRO CRISM TRR3 Hyperspectral Data Filtering
 MRO CRISM TRR3 Hyperspectral Data Filtering CRISM Data User's Workshop 03/18/12 F. Seelos, CRISM SOC CRISM PDS-Delivered VNIR TRR3 I/F 3-Panel Plot False Color RGB Composite Composite band distribution
MRO CRISM TRR3 Hyperspectral Data Filtering CRISM Data User's Workshop 03/18/12 F. Seelos, CRISM SOC CRISM PDS-Delivered VNIR TRR3 I/F 3-Panel Plot False Color RGB Composite Composite band distribution
CENG 477 Introduction to Computer Graphics. Ray Tracing: Shading
 CENG 477 Introduction to Computer Graphics Ray Tracing: Shading Last Week Until now we learned: How to create the primary rays from the given camera and image plane parameters How to intersect these rays
CENG 477 Introduction to Computer Graphics Ray Tracing: Shading Last Week Until now we learned: How to create the primary rays from the given camera and image plane parameters How to intersect these rays
Region-based Segmentation
 Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
A Novel Approach for Shadow Removal Based on Intensity Surface Approximation
 A Novel Approach for Shadow Removal Based on Intensity Surface Approximation Eli Arbel THESIS SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE MASTER DEGREE University of Haifa Faculty of Social
A Novel Approach for Shadow Removal Based on Intensity Surface Approximation Eli Arbel THESIS SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE MASTER DEGREE University of Haifa Faculty of Social
Multimedia Technology CHAPTER 4. Video and Animation
 CHAPTER 4 Video and Animation - Both video and animation give us a sense of motion. They exploit some properties of human eye s ability of viewing pictures. - Motion video is the element of multimedia
CHAPTER 4 Video and Animation - Both video and animation give us a sense of motion. They exploit some properties of human eye s ability of viewing pictures. - Motion video is the element of multimedia
Using a Raster Display Device for Photometric Stereo
 DEPARTMEN T OF COMP UTING SC IENC E Using a Raster Display Device for Photometric Stereo Nathan Funk & Yee-Hong Yang CRV 2007 May 30, 2007 Overview 2 MODEL 3 EXPERIMENTS 4 CONCLUSIONS 5 QUESTIONS 1. Background
DEPARTMEN T OF COMP UTING SC IENC E Using a Raster Display Device for Photometric Stereo Nathan Funk & Yee-Hong Yang CRV 2007 May 30, 2007 Overview 2 MODEL 3 EXPERIMENTS 4 CONCLUSIONS 5 QUESTIONS 1. Background
Lecture 15: Shading-I. CITS3003 Graphics & Animation
 Lecture 15: Shading-I CITS3003 Graphics & Animation E. Angel and D. Shreiner: Interactive Computer Graphics 6E Addison-Wesley 2012 Objectives Learn that with appropriate shading so objects appear as threedimensional
Lecture 15: Shading-I CITS3003 Graphics & Animation E. Angel and D. Shreiner: Interactive Computer Graphics 6E Addison-Wesley 2012 Objectives Learn that with appropriate shading so objects appear as threedimensional
Spectral Images and the Retinex Model
 Spectral Images and the Retine Model Anahit Pogosova 1, Tuija Jetsu 1, Ville Heikkinen 2, Markku Hauta-Kasari 1, Timo Jääskeläinen 2 and Jussi Parkkinen 1 1 Department of Computer Science and Statistics,
Spectral Images and the Retine Model Anahit Pogosova 1, Tuija Jetsu 1, Ville Heikkinen 2, Markku Hauta-Kasari 1, Timo Jääskeläinen 2 and Jussi Parkkinen 1 1 Department of Computer Science and Statistics,
ELEC Dr Reji Mathew Electrical Engineering UNSW
 ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Dynamic Range and Weber s Law HVS is capable of operating over an enormous dynamic range, However, sensitivity is far from uniform over this range Example:
ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Dynamic Range and Weber s Law HVS is capable of operating over an enormous dynamic range, However, sensitivity is far from uniform over this range Example:
Multi-stable Perception. Necker Cube
 Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
The Shading Probe: Fast Appearance Acquisition for Mobile AR
 The Shading Probe: Fast Appearance Acquisition for Mobile AR Dan Andrei Calian * Kenny Mitchell Derek Nowrouzezahrai Jan Kautz * * University College London Disney Research Zürich University of Montreal
The Shading Probe: Fast Appearance Acquisition for Mobile AR Dan Andrei Calian * Kenny Mitchell Derek Nowrouzezahrai Jan Kautz * * University College London Disney Research Zürich University of Montreal
A Statistical Consistency Check for the Space Carving Algorithm.
 A Statistical Consistency Check for the Space Carving Algorithm. A. Broadhurst and R. Cipolla Dept. of Engineering, Univ. of Cambridge, Cambridge, CB2 1PZ aeb29 cipolla @eng.cam.ac.uk Abstract This paper
A Statistical Consistency Check for the Space Carving Algorithm. A. Broadhurst and R. Cipolla Dept. of Engineering, Univ. of Cambridge, Cambridge, CB2 1PZ aeb29 cipolla @eng.cam.ac.uk Abstract This paper
Object Oriented Shadow Detection and an Enhanced Method for Shadow Removal
 Object Oriented Shadow Detection and an Enhanced Method for Shadow Removal Divya S Kumar Department of Computer Science and Engineering Sree Buddha College of Engineering, Alappuzha, India divyasreekumar91@gmail.com
Object Oriented Shadow Detection and an Enhanced Method for Shadow Removal Divya S Kumar Department of Computer Science and Engineering Sree Buddha College of Engineering, Alappuzha, India divyasreekumar91@gmail.com
Announcements. Camera Calibration. Thin Lens: Image of Point. Limits for pinhole cameras. f O Z
 Announcements Introduction to Computer Vision CSE 152 Lecture 5 Assignment 1 has been posted. See links on web page for reading Irfanview: http://www.irfanview.com/ is a good windows utility for manipulating
Announcements Introduction to Computer Vision CSE 152 Lecture 5 Assignment 1 has been posted. See links on web page for reading Irfanview: http://www.irfanview.com/ is a good windows utility for manipulating
COLOR FIDELITY OF CHROMATIC DISTRIBUTIONS BY TRIAD ILLUMINANT COMPARISON. Marcel P. Lucassen, Theo Gevers, Arjan Gijsenij
 COLOR FIDELITY OF CHROMATIC DISTRIBUTIONS BY TRIAD ILLUMINANT COMPARISON Marcel P. Lucassen, Theo Gevers, Arjan Gijsenij Intelligent Systems Lab Amsterdam, University of Amsterdam ABSTRACT Performance
COLOR FIDELITY OF CHROMATIC DISTRIBUTIONS BY TRIAD ILLUMINANT COMPARISON Marcel P. Lucassen, Theo Gevers, Arjan Gijsenij Intelligent Systems Lab Amsterdam, University of Amsterdam ABSTRACT Performance
HiTi. Color Management Utility Instructions
 HiTi Color Management Utility Instructions Benefits of using color management. Improve the consistency of printed colors against the colors displayed on the display screen. Users can also remotely fine
HiTi Color Management Utility Instructions Benefits of using color management. Improve the consistency of printed colors against the colors displayed on the display screen. Users can also remotely fine
Game Programming. Bing-Yu Chen National Taiwan University
 Game Programming Bing-Yu Chen National Taiwan University What is Computer Graphics? Definition the pictorial synthesis of real or imaginary objects from their computer-based models descriptions OUTPUT
Game Programming Bing-Yu Chen National Taiwan University What is Computer Graphics? Definition the pictorial synthesis of real or imaginary objects from their computer-based models descriptions OUTPUT
Reprint (R30) Accurate Chromaticity Measurements of Lighting Components. Reprinted with permission from Craig J. Coley The Communications Repair depot
 Accurate Chromaticity Measurements of Lighting Components. Reprinted with permission from Craig J. Coley The Communications Repair depot") Reprint (R30) Accurate Chromaticity Measurements of Lighting Components Reprinted with permission from Craig J. Coley The Communications Repair depot June 2006 Gooch & Housego 4632 36 th Street, Orlando,
Reprint (R30) Accurate Chromaticity Measurements of Lighting Components Reprinted with permission from Craig J. Coley The Communications Repair depot June 2006 Gooch & Housego 4632 36 th Street, Orlando,
Optic Flow and Basics Towards Horn-Schunck 1
 Optic Flow and Basics Towards Horn-Schunck 1 Lecture 7 See Section 4.1 and Beginning of 4.2 in Reinhard Klette: Concise Computer Vision Springer-Verlag, London, 2014 1 See last slide for copyright information.
Optic Flow and Basics Towards Horn-Schunck 1 Lecture 7 See Section 4.1 and Beginning of 4.2 in Reinhard Klette: Concise Computer Vision Springer-Verlag, London, 2014 1 See last slide for copyright information.
Today s class. Simple shadows Shading Lighting in OpenGL. Informationsteknologi. Wednesday, November 21, 2007 Computer Graphics - Class 10 1
 Today s class Simple shadows Shading Lighting in OpenGL Wednesday, November 21, 27 Computer Graphics - Class 1 1 Simple shadows Simple shadows can be gotten by using projection matrices Consider a light
Today s class Simple shadows Shading Lighting in OpenGL Wednesday, November 21, 27 Computer Graphics - Class 1 1 Simple shadows Simple shadows can be gotten by using projection matrices Consider a light
Dynamic range Physically Based Rendering. High dynamic range imaging. HDR image capture Exposure time from 30 s to 1 ms in 1-stop increments.
 Dynamic range Ambient luminance levels for some common lighting environments: 094 Physically Based Rendering Sun and Sky and Colour and Environment Maps Jeppe Revall Frisvad Condition Illumination cd/m
Dynamic range Ambient luminance levels for some common lighting environments: 094 Physically Based Rendering Sun and Sky and Colour and Environment Maps Jeppe Revall Frisvad Condition Illumination cd/m
Characterizing and Controlling the. Spectral Output of an HDR Display
 Characterizing and Controlling the Spectral Output of an HDR Display Ana Radonjić, Christopher G. Broussard, and David H. Brainard Department of Psychology, University of Pennsylvania, Philadelphia, PA
Characterizing and Controlling the Spectral Output of an HDR Display Ana Radonjić, Christopher G. Broussard, and David H. Brainard Department of Psychology, University of Pennsylvania, Philadelphia, PA
CS635 Spring Department of Computer Science Purdue University
 Light Transport CS635 Spring 2010 Daniel G Aliaga Daniel G. Aliaga Department of Computer Science Purdue University Topics Local and GlobalIllumination Models Helmholtz Reciprocity Dual Photography/Light
Light Transport CS635 Spring 2010 Daniel G Aliaga Daniel G. Aliaga Department of Computer Science Purdue University Topics Local and GlobalIllumination Models Helmholtz Reciprocity Dual Photography/Light
Color Appearance in Image Displays. O Canada!
 Color Appearance in Image Displays Mark D. Fairchild RIT Munsell Color Science Laboratory ISCC/CIE Expert Symposium 75 Years of the CIE Standard Colorimetric Observer Ottawa 26 O Canada Image Colorimetry
Color Appearance in Image Displays Mark D. Fairchild RIT Munsell Color Science Laboratory ISCC/CIE Expert Symposium 75 Years of the CIE Standard Colorimetric Observer Ottawa 26 O Canada Image Colorimetry
The Elements of Colour
 Color science 1 The Elements of Colour Perceived light of different wavelengths is in approximately equal weights achromatic.
Color science 1 The Elements of Colour Perceived light of different wavelengths is in approximately equal weights achromatic.
Point based global illumination is now a standard tool for film quality renderers. Since it started out as a real time technique it is only natural
 1 Point based global illumination is now a standard tool for film quality renderers. Since it started out as a real time technique it is only natural to consider using it in video games too. 2 I hope that
1 Point based global illumination is now a standard tool for film quality renderers. Since it started out as a real time technique it is only natural to consider using it in video games too. 2 I hope that