Structured Light II. Guido Gerig CS 6320, Spring (thanks: slides Prof. S. Narasimhan, CMU, Marc Pollefeys, UNC)
|
|
|
- Amelia Flynn
- 5 years ago
- Views:
Transcription

1 Structured Light II Guido Gerig CS 6320, Spring 2013 (thanks: slides Prof. S. Narasimhan, CMU, Marc Pollefeys, UNC) s06/lectures/ppts/lec-17.ppt

2 Variant
3 Active triangulation: Structured light One of the cameras is replaced by a light emitter Correspondence problem is solved by searching the pattern in the camera image (pattern decoding) No geometric constraints


4 Space-time stereo Zhang, Curless and Seitz, CVPR 03
5 Faster Acquisition? Project multiple stripes/patterns simultaneously. Correspondence problem: which stripe/pattern is which? How to uniquely identify patterns? Zhang 2002: Works in real-time and on dynamic scenes
6 Coded structured light Correspondence without need for geometrical constraints For dense correspondence, we need many light planes: Move the projection device Project many stripes at once: needs encoding Each pixel set is distinguishable by its encoding Codewords for pixels: Grey levels Color Geometrical considerations
7 Codeword Classification Time-multiplexing: Binary codes N-ary codes Gray code + phase shift Spatial Codification De Bruijn sequences M-arrays Direct encoding Grey levels Colour


8 Pattern encoding/decoding A pattern is encoded when after projecting it onto a surface, a set of regions of the observed projection can be easily matched with the original pattern. Example: pattern with two-encoded-columns Pixels in red and yellow are directly matched with the pattern columns Object scene Codification using colors The process of matching an image region with its corresponding pattern region is known as pattern decoding similar to searching correspondences Decoding a projected pattern allows a large set of correspondences to be easily found thanks to the a priori knowledge of the light pattern
9 Pattern encoding/decoding Two ways of encoding the correspondences: single and double axis codification it determines how the triangulation is calculated Single-axis encoding Double-axis encoding Triangulation by line-to-plane intersection Triangulation by line-to-line intersection Decoding the pattern means locating points in the camera image whose corresponding point in the projector pattern is a priori known


10 Time-Coded Light Patterns Assign each stripe a unique illumination code over time [Posdamer 82] Time Space
11 Binary Coding: Bit Plane Stack Assign each stripe a unique illumination code over time [Posdamer 82] Time Space 0 1 0
 Every encoded point is identified by the sequence of intensities that it receives n patterns must be projected in")
12 Binary Coding (II) Binary coding Only two illumination levels are commonly used, which are coded as 0 and 1. Gray code can be used for robustness (adjacent stripes must only differ in 1 bit) Every encoded point is identified by the sequence of intensities that it receives n patterns must be projected in order to encode 2 n stripes Advantages Easy to segment the image patterns Need a large number of patterns to be projected
13 Binary Encoded Light Stripes
14 Binary Encoded Light Stripes Set of light planes are projected into the scene Individual light planes are indexed by an encoding scheme for the light patterns Obtained images form a bit-plane stack Bit-plane stack is used to uniquely address the light plane corresponding to every image point


15 Binary code projection
")
16 Time Multiplexing A set of patterns are successively projected onto the measuring surface, codeword for a given pixel is formed by a sequence of patterns. The most common structure of the patterns is a sequence of stripes increasing its width by the time single-axis encoding Advantages: high resolution a lot of 3D points High accuracy (order of m) Robustness against colorful objects since binary patterns can be used Drawbacks: Static objects only Large number of patterns Projected over time Example: 5 binary-encoded patterns which allows the measuring surface to be divided in 32 sub-regions




17 Binary Coding Example: 7 binary patterns proposed by Posdamer & Altschuler Projected over time Pattern 3 Pattern 2 Pattern 1 Codeword of this píxel: identifies the corresponding pattern stripe

18 Concept Gray Code

19 Structured Lighting: Swept-Planes Revisited Point Grey Flea2 ( x 768) Mitsubishi XD300U ( x 768) Swept-plane scanning recovers 3D depth using ray-plane intersection Use a data projector to replace manually-swept laser/shadow planes How to assign correspondence from projector planes to camera pixels? Solution: Project a spatially- and temporally-encoded image sequence What is the optimal image sequence to project?



![1982] Each image is a](/docs-images/90/102650946/images/20-5.jpg "bit-plane of the binary code")


 must be")
20 Structured Lighting: Binary Codes Point Grey Flea2 ( x 768) Mitsubishi XD300U ( x 768) Binary Image Sequence [Posdamer and Altschuler 1982] Each image is a bit-plane of the binary code for projector row/column Minimum of 10 images to encode 1024 columns or 768 rows In practice, 20 images are used to encode 1024 columns or 768 rows Projector and camera(s) must be synchronized

 Mitsubishi XD300U")





![[Inokuchi 1984]](/docs-images/90/102650946/images/21-11.jpg "Bin2Gray(B,G) 1 G B 2")
21 Structured Lighting: Gray Codes Point Grey Flea2 ( x 768) Mitsubishi XD300U ( x 768) Gray Code Image Sequence Each image is a bit-plane of the Gray code for each projector row/column Requires same number of images as a binary image sequence, but has better performance in practice [Inokuchi 1984] Bin2Gray(B,G) 1 G B 2 for i n-1 downto 0 3 G[i] B[i+1] xor B[i]

22 Gray Code Frank Gray (-> name of coding sequence) Code of neighboring projector pixels only differ by 1bit, possibility of error correction!

![1984] Implemented using a total of 42 images (2 to measure](/docs-images/90/102650946/images/23-2.jpg "dynamic range, 20 to encode rows, 20 to encode columns)")
 is brighter Decoding algorithm: Gray code binary code")
23 Gray Codes: Decoding Performance Recovered Rows Recovered Columns 3D Reconstruction using Structured Light [Inokuchi 1984] Implemented using a total of 42 images (2 to measure dynamic range, 20 to encode rows, 20 to encode columns) Individual bits assigned by detecting if bit-plane (or its inverse) is brighter Decoding algorithm: Gray code binary code integer row/column index


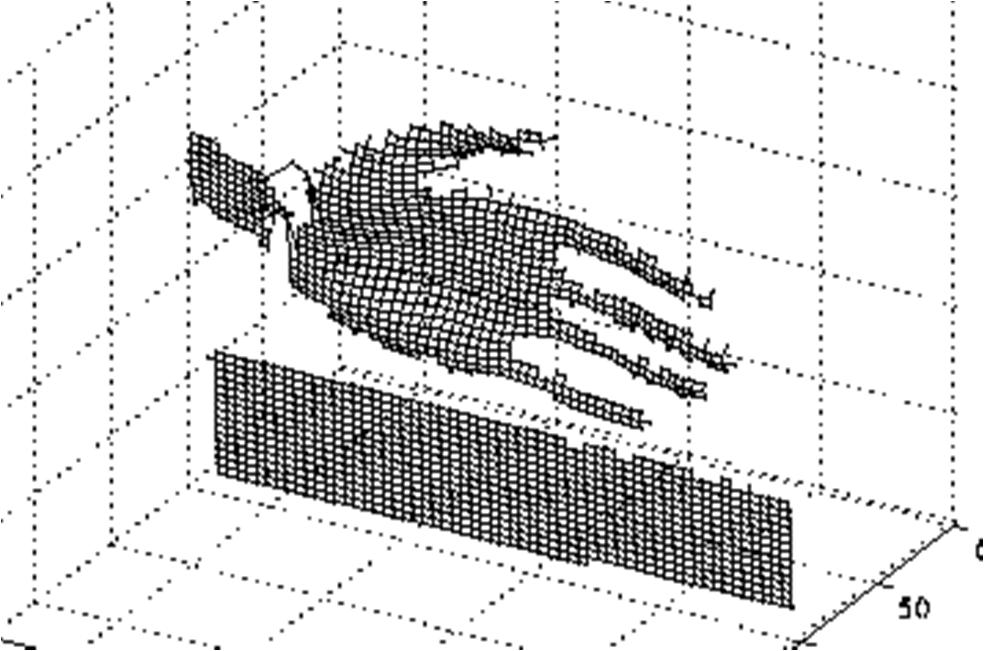
24 Examples

25 Alternatives
26 Towards higher precision and real time scanning
 Project Gray Code sequence Project set of 6 thin line patterns, detect line centers")

27 Line Shift Processing (Guehring et al.) Project Gray Code sequence Project set of 6 thin line patterns, detect line centers in image Combine line center positions with gray code encoding to resolve for ambiguities Obtain camera coordinates with subpixel accuracies for projector coordinates See Videometrics01-Guehring pdf for details

28 Gray Code + Phase Shifting (I) A sequence of binary patterns (Gray encoded) are projected in order to divide the object in regions Example: three binary patterns divide the object in 8 regions An additional periodical pattern is projected The periodical pattern is projected several times by shifting it in one direction in order to increase the resolution of the system similar to a laser scanner Gühring s line-shift technique Without the binary patterns we would not be able to distinguish among all the projected slits Every slit always falls in the same region

29 Industrial Inspection via line shift sequence
 Project set of patterns Project sin functions Interpolation")

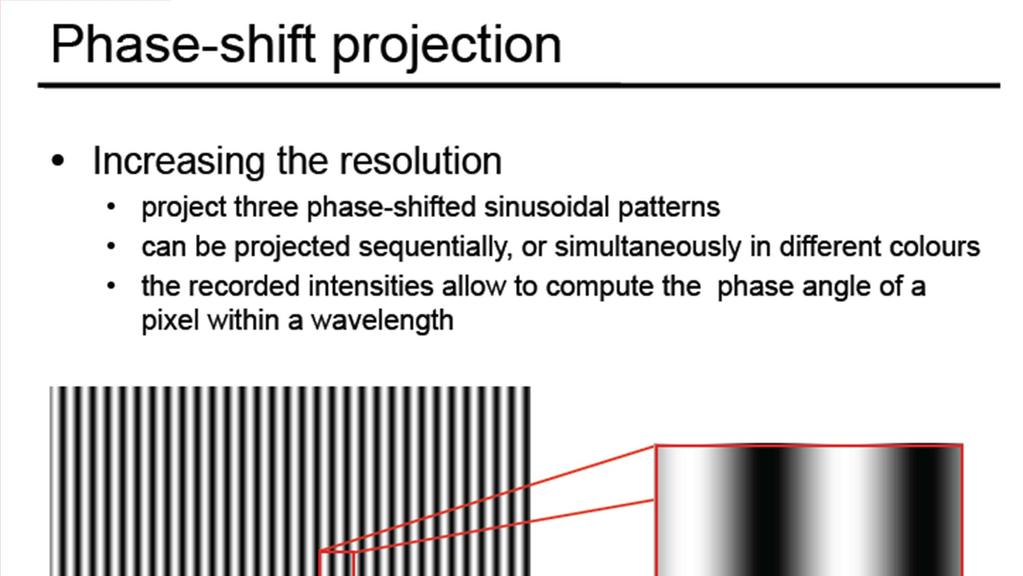
30 Phase Shift Method (Guehring etal.) Project set of patterns Project sin functions Interpolation between adjacent light planes Yields for each camera pixel corresponding strip with subpixel accuracy! See Videometrics01-Guehring pdf for details

31 Gray Code + Phase Shifting (II) Gray code + phase shifting Grey code: easy codification, low resolution Phase shifting: high resolution, neighborhood ambiguity Gray code + phase shifting: robust codification, no ambiguity and high resolution, but increase the number of projecting patterns

32 Source: n/machinevisionfs2011/coursematerial/mv-ss2011-structured.pdf
33
34
35
36
37
38 (or light stripes) (or light stripe)


39 See also:

40 N-ary codes Reduce the number of patterns by increasing the number of intensity levels used to encode the stripes. Multi grey levels instead of binary Multilevel gray code based on color. Alphabet of m symbols encodes m n stripes 3 patterns based on a n-ary code of 4 grey levels (Horn & Kiryati) 64 encoded stripes
41 Direct Codification Every encoded pixel is identified by its own intensity/color Since the codification is usually condensed in a unique pattern, the spectrum of intensities/colors used is very large Additional reference patterns must be projected in order to differentiate among all the projected intensities/colors: Ambient lighting (black pattern) Full illuminated (white pattern)
42 Introducing color in coding Allowing colors in coding is the same as augmenting code basis. This gives us more words with the same length. If the scene changes the color of projected light, then information can be lost. Reflectivity restrictions (neutral scene colors) have to be imposed to guarantee the correct decoding.
 T.")
43 Direct encoding with color Every encoded point of the pattern is identified by its colour Tajima and Iwakawa rainbow pattern (the rainbow is generated with a source of white light passing through a crystal prism) T. Sato patterns capable of cancelling the object colour by projecting three shifted patterns (it can be implemented with an LCD projector if few colours are projected)



44 Rainbow Pattern Assumes that the scene does not change the color of projected light
45 Direct Codification Every encoded pixel is identified by its own intensity/color Since the codification is usually condensed in a unique pattern, the spectrum of intensities/colors used is very large Additional reference patterns must be projected in order to differentiate among all the projected intensities/colors: Ambient lighting (black pattern) Full illuminated (white pattern) Advantages: Reduced number of patterns High resolution can be theoretically achieved Drawbacks: Very noisy in front of reflective properties of the objects, nonlinearities in the camera spectral response and projector spectrum non-standard light emitters are required in order to project single wave-lengths Low accuracy (order of 1 mm)
46 Spatial Coherence Coding in a single frame. Spatial Coherence can be local or global. The minimum number of pixels used to identify the projected code defines the accuracy of details to be recovered in the scene.



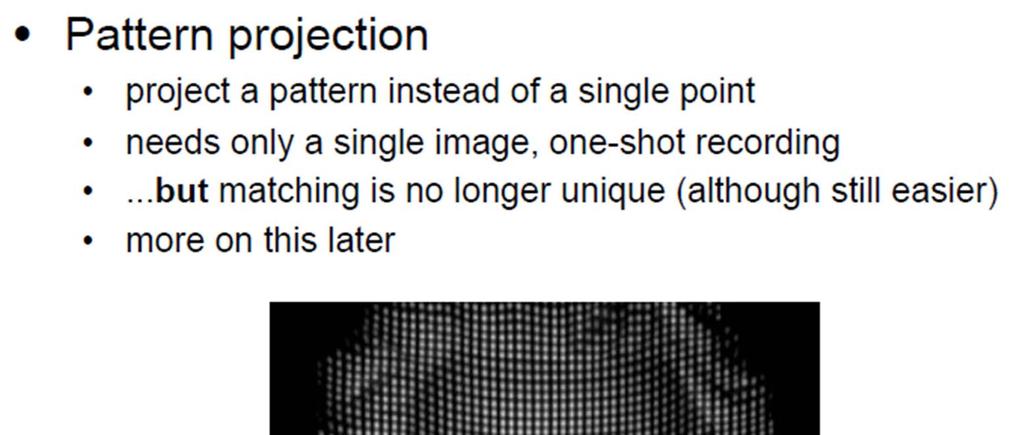
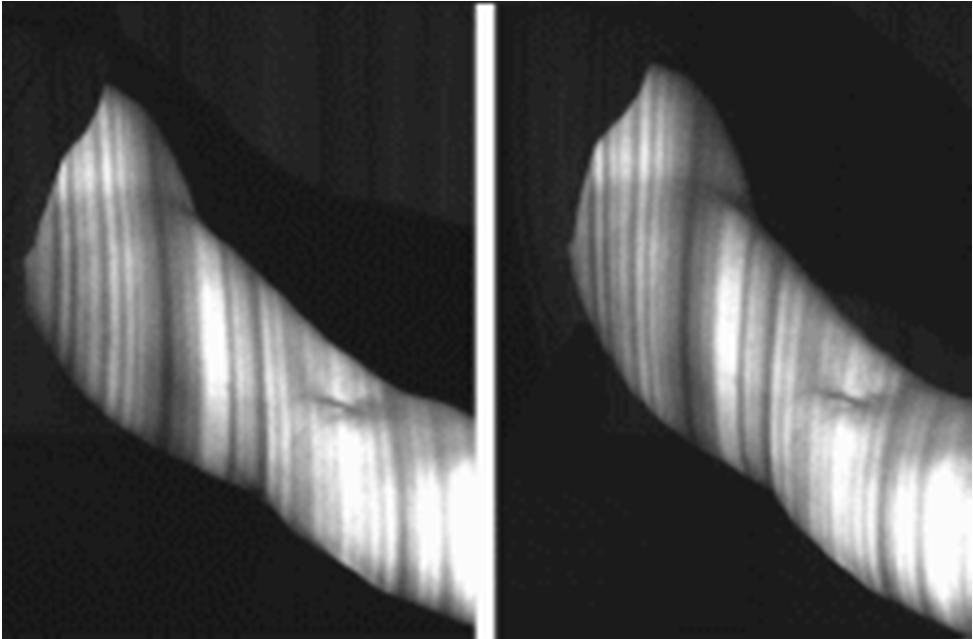
47 Real time by direct encoding Works despite complex appearances Works in real-time and on dynamic scenes Need very few images (one or two). But needs a more complex correspondence algorithm Zhang et al
.")
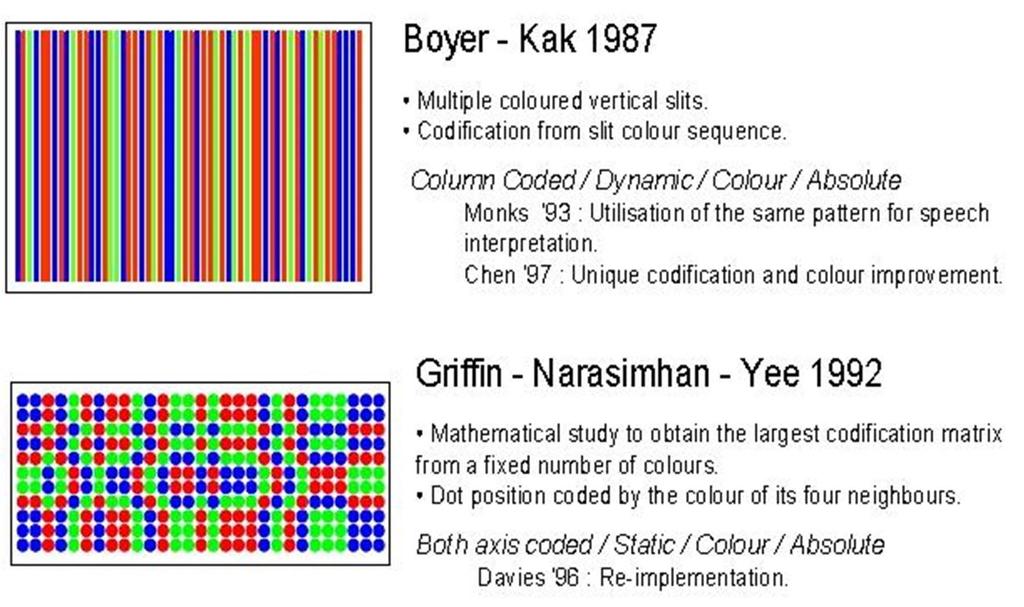
48 De Bruijn Sequences A De Bruijn sequence (or pseudorandom sequence) of order m over an alphabet of n symbols is a circular string of length n m that contains every substring of length m exactly once (in this case the windows are one-dimensional) m=4 (window size) n=2 (alphabet symbols) The De Bruijn sequences are used to define colored slit patterns (single axis codification) or grid patterns (double axis codification) In order to decode a certain slit it is only necessary to identify one of the windows in which it belongs to ) can resolve occlusion problem. Zhang et al.: 125 slits encoded with a De Bruijn sequence of 8 colors and window size of 3 slits Salvi et al.: grid of where a De Bruijn sequence of 3 colors and window size of 3 slits is used to encode the vertical and horizontal slits



49 M-Arrays An m-array is the bidimensional extension of a De Bruijn sequence. Every window of w h units appears only once. The window size is related with the size of the m-array and the number of symbols used Example: binary m- array of size 4 6 and window size of 2 2 Morano et al. M-array represented with an array of coloured dots M-array proposed by Vuylsteke et al. Represented with shape primitives Shape primitives used to represent every symbol of the alphabet

50 Some examples

51 Binary spatial coding


52 Problems in recovering pattern
53 Examples


54 Local spatial Coherence Medical Imaging Laboratory Departments of Biomedical Engineering and Radiology Johns Hopkins University School of Medicine Baltimore, MD 21205

 Gühring (113 slits)")
 Salvi (29x29")
 Spatial codification")
55 Experimental results Timemultiplexing Posdamer (128 stripes) Horn (64 stripes) Gühring (113 slits) De Bruijn Gühring De Bruijn (64 slits) Salvi (29x29 slits) Morano (45x45 dot array) Spatial codification Sato (64 slits) Direct codification
56 Discussion Structured Light Advantages robust - solves the correspondence problem fast - instantaneous recording, real-time processing Limitations less flexible than passive sensing: needs specialised equipment and suitable environment Applications industrial inspection entertainment healthcare heritage documentation..
57 Microsoft Kinect


58 Microsoft Kinect The Kinect combines structured light with two classic computer vision techniques: depth from focus, and depth from stereo.

59

60 Microsoft Kinect
61

62 Decoding table
63 Decoding table vertices d(0) d(1) d(2) d(3) V(00) V(01) V(02) V(10) V(11) V(12) th transition V(20) V(21) V(22)


64 Experiment
65 Spatial Codification Project a certain kind of spatial pattern so that a set of neighborhood points appears in the pattern only once. Then the codeword that labels a certain point of the pattern is obtained from a neighborhood of the point around it. The codification is condensed in a unique pattern instead of multiplexing it along time The size of the neighborhood (window size) is proportional to the number of encoded points and inversely proportional to the number of used colors The aim of these techniques is to obtain a one-shot measurement system moving objects can be measured Drawbacks: Advantages: Moving objects supported Possibility to condense the codification to a unique pattern Discontinuities on the object surface can produce erroneous window decoding (occlusions problem) The higher the number of used colours, the more difficult to correctly identify them when measuring nonneutral surfaces Maximum resolution cannot be reached


66

67 Results
68 Conclusions Types of techniques Time-multiplexing Spatial codification Highest resolution High accuracy Easy implementation Can measure moving objects A unique pattern is required Inapplicability to moving objects Large number of patterns Lower resolution than timemultiplexing More complex decoding stage Occlusions problem Direct codification High resolution Few patterns Very sensitive to image noise Inapplicability to moving objects
69 Guidelines Requirements High accuracy Highest resolution Static objects No matter the number of patterns High accuracy High resolution Static objects Minimum number of patterns High accuracy Good resolution Moving objects Best technique Phase shift + Gray code Gühring s line-shift technique N-ary pattern Horn & Kiryati Caspi et al. De Bruijn pattern Zhang et al.
Structured Light. Tobias Nöll Thanks to Marc Pollefeys, David Nister and David Lowe
 Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
3D Computer Vision. Structured Light I. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light I Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light I Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Optical Imaging Techniques and Applications
 Optical Imaging Techniques and Applications Jason Geng, Ph.D. Vice President IEEE Intelligent Transportation Systems Society jason.geng@ieee.org Outline Structured light 3D surface imaging concept Classification
Optical Imaging Techniques and Applications Jason Geng, Ph.D. Vice President IEEE Intelligent Transportation Systems Society jason.geng@ieee.org Outline Structured light 3D surface imaging concept Classification
3D Scanning. Qixing Huang Feb. 9 th Slide Credit: Yasutaka Furukawa
 3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
Surround Structured Lighting for Full Object Scanning
 Surround Structured Lighting for Full Object Scanning Douglas Lanman, Daniel Crispell, and Gabriel Taubin Brown University, Dept. of Engineering August 21, 2007 1 Outline Introduction and Related Work
Surround Structured Lighting for Full Object Scanning Douglas Lanman, Daniel Crispell, and Gabriel Taubin Brown University, Dept. of Engineering August 21, 2007 1 Outline Introduction and Related Work
The main problem of photogrammetry
 Structured Light Structured Light The main problem of photogrammetry to recover shape from multiple views of a scene, we need to find correspondences between the images the matching/correspondence problem
Structured Light Structured Light The main problem of photogrammetry to recover shape from multiple views of a scene, we need to find correspondences between the images the matching/correspondence problem
L2 Data Acquisition. Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods
 Structured light Range images Shape from shading Other methods") L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
Computational Optical Imaging - Optique Numerique. -- Active Light 3D--
 Computational Optical Imaging - Optique Numerique -- Active Light 3D-- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Overview 3D scanning techniques Laser triangulation Structured light Photometric
Computational Optical Imaging - Optique Numerique -- Active Light 3D-- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Overview 3D scanning techniques Laser triangulation Structured light Photometric
Stereo and structured light
 Stereo and structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 20 Course announcements Homework 5 is still ongoing. - Make sure
Stereo and structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 20 Course announcements Homework 5 is still ongoing. - Make sure
Optical Active 3D Scanning. Gianpaolo Palma
 Optical Active 3D Scanning Gianpaolo Palma 3D Scanning Taxonomy SHAPE ACQUISTION CONTACT NO-CONTACT NO DESTRUCTIVE DESTRUCTIVE X-RAY MAGNETIC OPTICAL ACOUSTIC CMM ROBOTIC GANTRY SLICING ACTIVE PASSIVE
Optical Active 3D Scanning Gianpaolo Palma 3D Scanning Taxonomy SHAPE ACQUISTION CONTACT NO-CONTACT NO DESTRUCTIVE DESTRUCTIVE X-RAY MAGNETIC OPTICAL ACOUSTIC CMM ROBOTIC GANTRY SLICING ACTIVE PASSIVE
ENGN 2911 I: 3D Photography and Geometry Processing Assignment 2: Structured Light for 3D Scanning
 ENGN 2911 I: 3D Photography and Geometry Processing Assignment 2: Structured Light for 3D Scanning Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 26 February 2009 Figure 1: Structured
ENGN 2911 I: 3D Photography and Geometry Processing Assignment 2: Structured Light for 3D Scanning Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 26 February 2009 Figure 1: Structured
Structured light , , Computational Photography Fall 2017, Lecture 27
 Structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 27 Course announcements Homework 5 has been graded. - Mean: 129. - Median:
Structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 27 Course announcements Homework 5 has been graded. - Mean: 129. - Median:
HIGH SPEED 3-D MEASUREMENT SYSTEM USING INCOHERENT LIGHT SOURCE FOR HUMAN PERFORMANCE ANALYSIS
 HIGH SPEED 3-D MEASUREMENT SYSTEM USING INCOHERENT LIGHT SOURCE FOR HUMAN PERFORMANCE ANALYSIS Takeo MIYASAKA, Kazuhiro KURODA, Makoto HIROSE and Kazuo ARAKI School of Computer and Cognitive Sciences,
HIGH SPEED 3-D MEASUREMENT SYSTEM USING INCOHERENT LIGHT SOURCE FOR HUMAN PERFORMANCE ANALYSIS Takeo MIYASAKA, Kazuhiro KURODA, Makoto HIROSE and Kazuo ARAKI School of Computer and Cognitive Sciences,
Optimal Decoding of Stripe Patterns with Window Uniqueness Constraint
 Optimal Decoding of Stripe Patterns with Window Uniqueness Constraint Shuntaro Yamazaki and Masaaki Mochimaru Digital Human Research Center National Institute of Advanced Industrial Science and Technology
Optimal Decoding of Stripe Patterns with Window Uniqueness Constraint Shuntaro Yamazaki and Masaaki Mochimaru Digital Human Research Center National Institute of Advanced Industrial Science and Technology
Robust and Accurate One-shot 3D Reconstruction by 2C1P System with Wave Grid Pattern
 Robust and Accurate One-shot 3D Reconstruction by 2C1P System with Wave Grid Pattern Nozomu Kasuya Kagoshima University Kagoshima, Japan AIST Tsukuba, Japan nozomu.kasuya@aist.go.jp Ryusuke Sagawa AIST
Robust and Accurate One-shot 3D Reconstruction by 2C1P System with Wave Grid Pattern Nozomu Kasuya Kagoshima University Kagoshima, Japan AIST Tsukuba, Japan nozomu.kasuya@aist.go.jp Ryusuke Sagawa AIST
Computer Vision. 3D acquisition
 è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
3D Photography: Stereo
 3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV Venus de Milo
 Vision Sensing Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV 2007 Venus de Milo The Digital Michelangelo Project, Stanford How to sense 3D very accurately? How to sense
Vision Sensing Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV 2007 Venus de Milo The Digital Michelangelo Project, Stanford How to sense 3D very accurately? How to sense
Hamming Color Code for Dense and Robust One-shot 3D Scanning
 YAMAZAKI, NUKADA, MOCHIMARU: HAMMING COLOR CODE 1 Hamming Color Code for Dense and Robust One-shot 3D Scanning Shuntaro Yamazaki 1 http://www.dh.aist.go.jp/~shun/ Akira Nukada 2 nukada@matsulab.is.titech.ac.jp
YAMAZAKI, NUKADA, MOCHIMARU: HAMMING COLOR CODE 1 Hamming Color Code for Dense and Robust One-shot 3D Scanning Shuntaro Yamazaki 1 http://www.dh.aist.go.jp/~shun/ Akira Nukada 2 nukada@matsulab.is.titech.ac.jp
Unstructured Light Scanning to Overcome Interreflections
 Unstructured Light Scanning to Overcome Interreflections Vincent Couture Universite de Montre al Nicolas Martin Universite de Montre al Se bastien Roy Universite de Montre al chapdelv@iro.umontreal.ca
Unstructured Light Scanning to Overcome Interreflections Vincent Couture Universite de Montre al Nicolas Martin Universite de Montre al Se bastien Roy Universite de Montre al chapdelv@iro.umontreal.ca
3D Photography: Active Ranging, Structured Light, ICP
 3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Object Representations. COS 526, Fall 2016 Princeton University
 3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
Binocular stereo. Given a calibrated binocular stereo pair, fuse it to produce a depth image. Where does the depth information come from?
 Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
A Coded Structured Light Projection Method for High-Frame-Rate 3D Image Acquisition
 A Coded Structured Light Projection Method for High-Frame-Rate D Image Acquisition 0 Idaku Ishii Hiroshima University Japan. Introduction Three-dimensional measurement technology has recently been used
A Coded Structured Light Projection Method for High-Frame-Rate D Image Acquisition 0 Idaku Ishii Hiroshima University Japan. Introduction Three-dimensional measurement technology has recently been used
Motion-Aware Structured Light Using Spatio-Temporal Decodable Patterns
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Motion-Aware Structured Light Using Spatio-Temporal Decodable Patterns Taguchi, Y.; Agrawal, A.; Tuzel, O. TR2012-077 October 2012 Abstract
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Motion-Aware Structured Light Using Spatio-Temporal Decodable Patterns Taguchi, Y.; Agrawal, A.; Tuzel, O. TR2012-077 October 2012 Abstract
Active Stereo Vision. COMP 4900D Winter 2012 Gerhard Roth
 Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Handy Rangefinder for Active Robot Vision
 Handy Rangefinder for Active Robot Vision Kazuyuki Hattori Yukio Sato Department of Electrical and Computer Engineering Nagoya Institute of Technology Showa, Nagoya 466, Japan Abstract A compact and high-speed
Handy Rangefinder for Active Robot Vision Kazuyuki Hattori Yukio Sato Department of Electrical and Computer Engineering Nagoya Institute of Technology Showa, Nagoya 466, Japan Abstract A compact and high-speed
Color-Stripe Structured Light Robust to Surface Color and Discontinuity
 Preprint Kwang Hee Lee, Changsoo Je, and Sang Wook Lee. Color-Stripe Structured Light Robust to Surface Color and Discontinuity. Computer Vision - ACCV 2007, LNCS 4844 (8th Asian Conference on Computer
Preprint Kwang Hee Lee, Changsoo Je, and Sang Wook Lee. Color-Stripe Structured Light Robust to Surface Color and Discontinuity. Computer Vision - ACCV 2007, LNCS 4844 (8th Asian Conference on Computer
Entire Shape Acquisition Technique Using Multiple Projectors and Cameras with Parallel Pattern Projection
 [DOI: 10.2197/ipsjtcva.4.1] Research Paper Entire Shape Acquisition Technique Using Multiple Projectors and Cameras with Parallel Pattern Projection Ryo Furukawa 1,a) Ryusuke Sagawa 2 Hiroshi Kawasaki
[DOI: 10.2197/ipsjtcva.4.1] Research Paper Entire Shape Acquisition Technique Using Multiple Projectors and Cameras with Parallel Pattern Projection Ryo Furukawa 1,a) Ryusuke Sagawa 2 Hiroshi Kawasaki
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Novel Approaches in Structured Light Illumination
 University of Kentucky UKnowledge University of Kentucky Doctoral Dissertations Graduate School 2010 Novel Approaches in Structured Light Illumination Yongchang Wang University of Kentucky, ychwang6@gmail.com
University of Kentucky UKnowledge University of Kentucky Doctoral Dissertations Graduate School 2010 Novel Approaches in Structured Light Illumination Yongchang Wang University of Kentucky, ychwang6@gmail.com
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Stereo. Many slides adapted from Steve Seitz
 Stereo Many slides adapted from Steve Seitz Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image image 1 image 2 Dense depth map Binocular stereo Given a calibrated
Stereo Many slides adapted from Steve Seitz Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image image 1 image 2 Dense depth map Binocular stereo Given a calibrated
Optimised De Bruijn patterns for one-shot shape acquisition
 Image and Vision Computing 23 (2005) 707 720 www.elsevier.com/locate/imavis Optimised De Bruijn patterns for one-shot shape acquisition Jordi Pagès a, Joaquim Salvi a, *, Christophe Collewet b, Josep Forest
Image and Vision Computing 23 (2005) 707 720 www.elsevier.com/locate/imavis Optimised De Bruijn patterns for one-shot shape acquisition Jordi Pagès a, Joaquim Salvi a, *, Christophe Collewet b, Josep Forest
Stereo vision. Many slides adapted from Steve Seitz
 Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
There are many cues in monocular vision which suggests that vision in stereo starts very early from two similar 2D images. Lets see a few...
 STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
Optimized Projection Pattern Supplementing Stereo Systems
 Optimized Projection Pattern Supplementing Stereo Systems Jongwoo Lim Honda Research Institute USA inc. Mountain View, CA 944, USA jlim@honda-ri.com Abstract Stereo camera systems are widely used in many
Optimized Projection Pattern Supplementing Stereo Systems Jongwoo Lim Honda Research Institute USA inc. Mountain View, CA 944, USA jlim@honda-ri.com Abstract Stereo camera systems are widely used in many
Visual Perception Sensors
 G. Glaser Visual Perception Sensors 1 / 27 MIN Faculty Department of Informatics Visual Perception Sensors Depth Determination Gerrit Glaser University of Hamburg Faculty of Mathematics, Informatics and
G. Glaser Visual Perception Sensors 1 / 27 MIN Faculty Department of Informatics Visual Perception Sensors Depth Determination Gerrit Glaser University of Hamburg Faculty of Mathematics, Informatics and
Assignment 2: Stereo and 3D Reconstruction from Disparity
 CS 6320, 3D Computer Vision Spring 2013, Prof. Guido Gerig Assignment 2: Stereo and 3D Reconstruction from Disparity Out: Mon Feb-11-2013 Due: Mon Feb-25-2013, midnight (theoretical and practical parts,
CS 6320, 3D Computer Vision Spring 2013, Prof. Guido Gerig Assignment 2: Stereo and 3D Reconstruction from Disparity Out: Mon Feb-11-2013 Due: Mon Feb-25-2013, midnight (theoretical and practical parts,
3D Computer Vision. Depth Cameras. Prof. Didier Stricker. Oliver Wasenmüller
 3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Scanning Method for Fast Motion using Single Grid Pattern with Coarse-to-fine Technique
 3D Scanning Method for Fast Motion using Single Grid Pattern with Coarse-to-fine Technique Ryo Furukawa Faculty of information sciences, Hiroshima City University, Japan ryo-f@cs.hiroshima-cu.ac.jp Hiroshi
3D Scanning Method for Fast Motion using Single Grid Pattern with Coarse-to-fine Technique Ryo Furukawa Faculty of information sciences, Hiroshima City University, Japan ryo-f@cs.hiroshima-cu.ac.jp Hiroshi
What have we leaned so far?
 What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
ENGN D Photography / Spring 2018 / SYLLABUS
 ENGN 2502 3D Photography / Spring 2018 / SYLLABUS Description of the proposed course Over the last decade digital photography has entered the mainstream with inexpensive, miniaturized cameras routinely
ENGN 2502 3D Photography / Spring 2018 / SYLLABUS Description of the proposed course Over the last decade digital photography has entered the mainstream with inexpensive, miniaturized cameras routinely
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
3D graphics, raster and colors CS312 Fall 2010
 Computer Graphics 3D graphics, raster and colors CS312 Fall 2010 Shift in CG Application Markets 1989-2000 2000 1989 3D Graphics Object description 3D graphics model Visualization 2D projection that simulates
Computer Graphics 3D graphics, raster and colors CS312 Fall 2010 Shift in CG Application Markets 1989-2000 2000 1989 3D Graphics Object description 3D graphics model Visualization 2D projection that simulates
CONTENTS. High-Accuracy Stereo Depth Maps Using Structured Light. Yeojin Yoon
 [Paper Seminar 7] CVPR2003, Vol.1, pp.195-202 High-Accuracy Stereo Depth Maps Using Structured Light Daniel Scharstein Middlebury College Richard Szeliski Microsoft Research 2012. 05. 30. Yeojin Yoon Introduction
[Paper Seminar 7] CVPR2003, Vol.1, pp.195-202 High-Accuracy Stereo Depth Maps Using Structured Light Daniel Scharstein Middlebury College Richard Szeliski Microsoft Research 2012. 05. 30. Yeojin Yoon Introduction
Temporally-Consistent Phase Unwrapping for a Stereo-Assisted Structured Light System
 Temporally-Consistent Phase Unwrapping for a Stereo-Assisted Structured Light System Ricardo R. Garcia and Avideh Zakhor Department of Electrical Engineering and Computer Science University of California,
Temporally-Consistent Phase Unwrapping for a Stereo-Assisted Structured Light System Ricardo R. Garcia and Avideh Zakhor Department of Electrical Engineering and Computer Science University of California,
Recap from Previous Lecture
 Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Chaplin, Modern Times, 1936
 Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
UNIT-2 IMAGE REPRESENTATION IMAGE REPRESENTATION IMAGE SENSORS IMAGE SENSORS- FLEX CIRCUIT ASSEMBLY
 18-08-2016 UNIT-2 In the following slides we will consider what is involved in capturing a digital image of a real-world scene Image sensing and representation Image Acquisition Sampling and quantisation
18-08-2016 UNIT-2 In the following slides we will consider what is involved in capturing a digital image of a real-world scene Image sensing and representation Image Acquisition Sampling and quantisation
Surround Structured Lighting for Full Object Scanning
 Surround Structured Lighting for Full Object Scanning Douglas Lanman, Daniel Crispell, and Gabriel Taubin Department of Engineering, Brown University {dlanman,daniel crispell,taubin}@brown.edu Abstract
Surround Structured Lighting for Full Object Scanning Douglas Lanman, Daniel Crispell, and Gabriel Taubin Department of Engineering, Brown University {dlanman,daniel crispell,taubin}@brown.edu Abstract
Metrology and Sensing
 Metrology and Sensing Lecture 4: Fringe projection 2016-11-08 Herbert Gross Winter term 2016 www.iap.uni-jena.de 2 Preliminary Schedule No Date Subject Detailed Content 1 18.10. Introduction Introduction,
Metrology and Sensing Lecture 4: Fringe projection 2016-11-08 Herbert Gross Winter term 2016 www.iap.uni-jena.de 2 Preliminary Schedule No Date Subject Detailed Content 1 18.10. Introduction Introduction,
3D Modeling of Objects Using Laser Scanning
 1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision
 Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Other Reconstruction Techniques
 Other Reconstruction Techniques Ruigang Yang CS 684 CS 684 Spring 2004 1 Taxonomy of Range Sensing From Brain Curless, SIGGRAPH 00 Lecture notes CS 684 Spring 2004 2 Taxonomy of Range Scanning (cont.)
Other Reconstruction Techniques Ruigang Yang CS 684 CS 684 Spring 2004 1 Taxonomy of Range Sensing From Brain Curless, SIGGRAPH 00 Lecture notes CS 684 Spring 2004 2 Taxonomy of Range Scanning (cont.)
Agenda. DLP 3D scanning Introduction DLP 3D scanning SDK Introduction Advance features for existing SDK
 Agenda DLP 3D scanning Introduction DLP 3D scanning SDK Introduction Advance features for existing SDK Increasing scanning speed from 20Hz to 400Hz Improve the lost point cloud 3D Machine Vision Applications:
Agenda DLP 3D scanning Introduction DLP 3D scanning SDK Introduction Advance features for existing SDK Increasing scanning speed from 20Hz to 400Hz Improve the lost point cloud 3D Machine Vision Applications:
Sensing Deforming and Moving Objects with Commercial Off the Shelf Hardware
 Sensing Deforming and Moving Objects with Commercial Off the Shelf Hardware This work supported by: Philip Fong Florian Buron Stanford University Motivational Applications Human tissue modeling for surgical
Sensing Deforming and Moving Objects with Commercial Off the Shelf Hardware This work supported by: Philip Fong Florian Buron Stanford University Motivational Applications Human tissue modeling for surgical
Depth. Common Classification Tasks. Example: AlexNet. Another Example: Inception. Another Example: Inception. Depth
 Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Metrology and Sensing
 Metrology and Sensing Lecture 4: Fringe projection 2018-11-09 Herbert Gross Winter term 2018 www.iap.uni-jena.de 2 Schedule Optical Metrology and Sensing 2018 No Date Subject Detailed Content 1 16.10.
Metrology and Sensing Lecture 4: Fringe projection 2018-11-09 Herbert Gross Winter term 2018 www.iap.uni-jena.de 2 Schedule Optical Metrology and Sensing 2018 No Date Subject Detailed Content 1 16.10.
EECS 442 Computer vision. Stereo systems. Stereo vision Rectification Correspondence problem Active stereo vision systems
 EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
A High Speed Face Measurement System
 A High Speed Face Measurement System Kazuhide HASEGAWA, Kazuyuki HATTORI and Yukio SATO Department of Electrical and Computer Engineering, Nagoya Institute of Technology Gokiso, Showa, Nagoya, Japan, 466-8555
A High Speed Face Measurement System Kazuhide HASEGAWA, Kazuyuki HATTORI and Yukio SATO Department of Electrical and Computer Engineering, Nagoya Institute of Technology Gokiso, Showa, Nagoya, Japan, 466-8555
COLOR MULTIPLEXED SINGLE PATTERN SLI
 University of Kentucky UKnowledge University of Kentucky Master's Theses Graduate School 2008 COLOR MULTIPLEXED SINGLE PATTERN SLI Neelima Mandava University of Kentucky, Neelima.Mandava@gmail.com Click
University of Kentucky UKnowledge University of Kentucky Master's Theses Graduate School 2008 COLOR MULTIPLEXED SINGLE PATTERN SLI Neelima Mandava University of Kentucky, Neelima.Mandava@gmail.com Click
Outline. ETN-FPI Training School on Plenoptic Sensing
 Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Abstract In this paper, we propose a new technique to achieve one-shot scan using single color and static pattern projector; such a method is ideal
 Abstract In this paper, we propose a new technique to achieve one-shot scan using single color and static pattern projector; such a method is ideal for acquisition of moving objects. Since projector-camera
Abstract In this paper, we propose a new technique to achieve one-shot scan using single color and static pattern projector; such a method is ideal for acquisition of moving objects. Since projector-camera
Embedded Phase Shifting: Robust Phase Shifting with Embedded Signals
 Embedded Phase Shifting: Robust Phase Shifting with Embedded Signals Daniel Moreno Kilho Son Gabriel Taubin Brown University, Providence, RI, USA {daniel moreno, kilho son, gabriel taubin}@brown.edu Abstract
Embedded Phase Shifting: Robust Phase Shifting with Embedded Signals Daniel Moreno Kilho Son Gabriel Taubin Brown University, Providence, RI, USA {daniel moreno, kilho son, gabriel taubin}@brown.edu Abstract
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
IEEE JOURNAL OF SELECTED TOPICS IN SIGNAL PROCESSING, VOL. 6, NO. 5, SEPTEMBER
 IEEE JOURNAL OF SELECTED TOPICS IN SIGNAL PROCESSING, VOL. 6, NO. 5, SEPTEMBER 2012 411 Consistent Stereo-Assisted Absolute Phase Unwrapping Methods for Structured Light Systems Ricardo R. Garcia, Student
IEEE JOURNAL OF SELECTED TOPICS IN SIGNAL PROCESSING, VOL. 6, NO. 5, SEPTEMBER 2012 411 Consistent Stereo-Assisted Absolute Phase Unwrapping Methods for Structured Light Systems Ricardo R. Garcia, Student
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Capturing, Modeling, Rendering 3D Structures
 Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Exploiting Time-Multiplexing Structured Light with Picoprojectors
 Exploiting Time-Multiplexing Structured Light with Picoprojectors Mario Valerio Giuffrida a, Giovanni Maria Farinella a, Sebastiano Battiato a, Mirko Guarnera b a IPLab, DMI, University of Catania, Viale
Exploiting Time-Multiplexing Structured Light with Picoprojectors Mario Valerio Giuffrida a, Giovanni Maria Farinella a, Sebastiano Battiato a, Mirko Guarnera b a IPLab, DMI, University of Catania, Viale
Lecture 19: Depth Cameras. Visual Computing Systems CMU , Fall 2013
 Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Dense 3-D surface acquisition by structured light using off-the-shelf components
 Dense 3-D surface acquisition by structured light using off-the-shelf components Jens Gühring * Institute for Photogrammetry University of Stuttgart/Germany ABSTRACT This paper describes the implementation
Dense 3-D surface acquisition by structured light using off-the-shelf components Jens Gühring * Institute for Photogrammetry University of Stuttgart/Germany ABSTRACT This paper describes the implementation
Depth Sensors Kinect V2 A. Fornaser
 Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Multiview Projectors/Cameras System for 3D Reconstruction of Dynamic Scenes
 Multiview Projectors/Cameras System for 3D Reconstruction of Dynamic Scenes Ryo Furukawa Hiroshima City University, Hiroshima, Japan ryo-f@hiroshima-cu.ac.jp Ryusuke Sagawa National Institute of Advanced
Multiview Projectors/Cameras System for 3D Reconstruction of Dynamic Scenes Ryo Furukawa Hiroshima City University, Hiroshima, Japan ryo-f@hiroshima-cu.ac.jp Ryusuke Sagawa National Institute of Advanced
DEVELOPMENT OF REAL TIME 3-D MEASUREMENT SYSTEM USING INTENSITY RATIO METHOD
 DEVELOPMENT OF REAL TIME 3-D MEASUREMENT SYSTEM USING INTENSITY RATIO METHOD Takeo MIYASAKA and Kazuo ARAKI Graduate School of Computer and Cognitive Sciences, Chukyo University, Japan miyasaka@grad.sccs.chukto-u.ac.jp,
DEVELOPMENT OF REAL TIME 3-D MEASUREMENT SYSTEM USING INTENSITY RATIO METHOD Takeo MIYASAKA and Kazuo ARAKI Graduate School of Computer and Cognitive Sciences, Chukyo University, Japan miyasaka@grad.sccs.chukto-u.ac.jp,
Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by ) Readings Szeliski, Chapter 10 (through 10.5)
 Readings Szeliski, Chapter 10 (through 10.5)") Announcements Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by email) One-page writeup (from project web page), specifying:» Your team members» Project goals. Be specific.
Announcements Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by email) One-page writeup (from project web page), specifying:» Your team members» Project goals. Be specific.
Color-Stripe Structured Light Robust to Surface Color and Discontinuity
 Color-Stripe Structured Light Robust to Surface Color and Discontinuity Kwang Hee Lee, Changsoo Je, and Sang Wook Lee Dept. of Media Technology Sogang University Shinsu-dong 1, Mapo-gu, Seoul 121-742,
Color-Stripe Structured Light Robust to Surface Color and Discontinuity Kwang Hee Lee, Changsoo Je, and Sang Wook Lee Dept. of Media Technology Sogang University Shinsu-dong 1, Mapo-gu, Seoul 121-742,
CS 4495/7495 Computer Vision Frank Dellaert, Fall 07. Dense Stereo Some Slides by Forsyth & Ponce, Jim Rehg, Sing Bing Kang
 CS 4495/7495 Computer Vision Frank Dellaert, Fall 07 Dense Stereo Some Slides by Forsyth & Ponce, Jim Rehg, Sing Bing Kang Etymology Stereo comes from the Greek word for solid (στερεο), and the term can
CS 4495/7495 Computer Vision Frank Dellaert, Fall 07 Dense Stereo Some Slides by Forsyth & Ponce, Jim Rehg, Sing Bing Kang Etymology Stereo comes from the Greek word for solid (στερεο), and the term can
Registration of Moving Surfaces by Means of One-Shot Laser Projection
 Registration of Moving Surfaces by Means of One-Shot Laser Projection Carles Matabosch 1,DavidFofi 2, Joaquim Salvi 1, and Josep Forest 1 1 University of Girona, Institut d Informatica i Aplicacions, Girona,
Registration of Moving Surfaces by Means of One-Shot Laser Projection Carles Matabosch 1,DavidFofi 2, Joaquim Salvi 1, and Josep Forest 1 1 University of Girona, Institut d Informatica i Aplicacions, Girona,
Finally: Motion and tracking. Motion 4/20/2011. CS 376 Lecture 24 Motion 1. Video. Uses of motion. Motion parallax. Motion field
 Finally: Motion and tracking Tracking objects, video analysis, low level motion Motion Wed, April 20 Kristen Grauman UT-Austin Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys, and S. Lazebnik
Finally: Motion and tracking Tracking objects, video analysis, low level motion Motion Wed, April 20 Kristen Grauman UT-Austin Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys, and S. Lazebnik
3D object recognition used by team robotto
 3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
Mirror Based Framework for Human Body Measurement
 362 Mirror Based Framework for Human Body Measurement 1 Takeshi Hashimoto, 2 Takayuki Suzuki, 3 András Rövid 1 Dept. of Electrical and Electronics Engineering, Shizuoka University 5-1, 3-chome Johoku,
362 Mirror Based Framework for Human Body Measurement 1 Takeshi Hashimoto, 2 Takayuki Suzuki, 3 András Rövid 1 Dept. of Electrical and Electronics Engineering, Shizuoka University 5-1, 3-chome Johoku,
Defect Inspection of Liquid-Crystal-Display (LCD) Panels in Repetitive Pattern Images Using 2D Fourier Image Reconstruction
 Panels in Repetitive Pattern Images Using 2D Fourier Image Reconstruction") Defect Inspection of Liquid-Crystal-Display (LCD) Panels in Repetitive Pattern Images Using D Fourier Image Reconstruction Du-Ming Tsai, and Yan-Hsin Tseng Department of Industrial Engineering and Management
Defect Inspection of Liquid-Crystal-Display (LCD) Panels in Repetitive Pattern Images Using D Fourier Image Reconstruction Du-Ming Tsai, and Yan-Hsin Tseng Department of Industrial Engineering and Management
A PHOTOGRAMMETRIC METHOD FOR ENHANCING THE DETECTION OF BONE FRAGMENTS AND OTHER HAZARD MATERIALS IN CHICKEN FILETS
 A PHOTOGRAMMETRIC METHOD FOR ENHANCING THE DETECTION OF BONE FRAGMENTS AND OTHER HAZARD MATERIALS IN CHICKEN FILETS S. Barnea a,* V. Alchanatis b H. Stern a a Dept. of Industrial Engineering and Management,
A PHOTOGRAMMETRIC METHOD FOR ENHANCING THE DETECTION OF BONE FRAGMENTS AND OTHER HAZARD MATERIALS IN CHICKEN FILETS S. Barnea a,* V. Alchanatis b H. Stern a a Dept. of Industrial Engineering and Management,
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo In this lecture, we ll first discuss another framework for describing stereo systems called active stereo, and then introduce the problem of volumetric stereo,
Lecture 8 Active stereo & Volumetric stereo In this lecture, we ll first discuss another framework for describing stereo systems called active stereo, and then introduce the problem of volumetric stereo,
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Multi-Projector Color Structured-Light Vision
 Preprint Changsoo Je, Kwang Hee Lee, and Sang Wook Lee. Multi-Projector Color Structured-Light Vision. Signal Processing: Image Communication, Volume 8, Issue 9, pp. 046-058, October, 03. http://dx.doi.org/0.06/j.image.03.05.005
Preprint Changsoo Je, Kwang Hee Lee, and Sang Wook Lee. Multi-Projector Color Structured-Light Vision. Signal Processing: Image Communication, Volume 8, Issue 9, pp. 046-058, October, 03. http://dx.doi.org/0.06/j.image.03.05.005
CS4495/6495 Introduction to Computer Vision. 3B-L3 Stereo correspondence
 CS4495/6495 Introduction to Computer Vision 3B-L3 Stereo correspondence For now assume parallel image planes Assume parallel (co-planar) image planes Assume same focal lengths Assume epipolar lines are
CS4495/6495 Introduction to Computer Vision 3B-L3 Stereo correspondence For now assume parallel image planes Assume parallel (co-planar) image planes Assume same focal lengths Assume epipolar lines are
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Measurement of 3D Foot Shape Deformation in Motion
 Measurement of 3D Foot Shape Deformation in Motion Makoto Kimura Masaaki Mochimaru Takeo Kanade Digital Human Research Center National Institute of Advanced Industrial Science and Technology, Japan The
Measurement of 3D Foot Shape Deformation in Motion Makoto Kimura Masaaki Mochimaru Takeo Kanade Digital Human Research Center National Institute of Advanced Industrial Science and Technology, Japan The