The main problem of photogrammetry
|
|
|
- Dinah Pierce
- 6 years ago
- Views:
Transcription

1 Structured Light
2 Structured Light The main problem of photogrammetry to recover shape from multiple views of a scene, we need to find correspondences between the images the matching/correspondence problem is hard the 3D object geometry cannot be reconstructed in image regions without well-defined image points Structured light idea: find ways to simplify matching and guarantee dense coverage with homologous points general strategy: use illumination to create your own correspondences probably the most robust method in practice widely used (industrial metrology, entertainment,...) also known as active stereo or white light scanning
3 Basic Principle Light projection use a projector to create unambiguous correspondences with these correspondences, apply conventional stereo if we project a single point, matching is unique... but many images needed to cover the object Note: less sophisticated variants include dusting surfaces with chalk, spraying them with water, etc.

4 Variant Pattern projection project a pattern instead of a single point needs only a single image, one-shot recording...but matching is no longer unique (although still easier) more on this later
5 Line projection Extension for a calibrated camera rig, the epipolar geometry is known can project a line instead of a single point a lot fewer images needed (one for all points on a line) the line intersects each epipolar line in one point matching is still unique
6 But we can do better Observation a projector is just an inverse camera, ray direction is reversed the projector is described by the same geometric model projected pattern and image define two rays in space projector and one camera are sufficient for triangulation
7 Calibrated projection Projector-camera system must be calibrated (otherwise would not be able to triangulate) the projected pattern is known thus the depth depends only on the image point location depth computation reduces to table-lookup

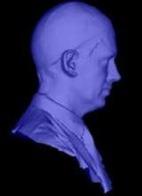
8 Laser stripe Line projection shine a laser through a cylindrical lens results in a planar sheet of light Example: the Digital Michelangelo Project laser line rigidly mounted to camera complete system is scanned across the object

9 Digital Michelangelo Project


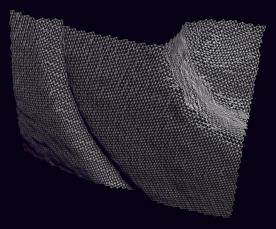
10 Digital Michelangelo Project

11 Pattern projectors Project multiple stripes or a grid avoids scanning, respectively taking multiple images only a single image is required to cover the scene... but stripes/grid points are no longer unique Which stripe matches which?... the correspondence problem again
12 Pattern projectors Answer 1: assume surface continuity... the ordering constraint, as in conventional stereo


13 Pattern projectors Answer 1: assume surface continuity

 difficult to use for coloured")
14 Pattern projectors Answer 2: coloured stripes or dots can be designed such that local patterns are unambiguous (c.f. bar-codes) difficult to use for coloured surfaces

15 Pattern projectors Answer 2: coloured stripes or dots can be designed such that local patterns are unambiguous (c.f. bar-codes) difficult to use for coloured surfaces
16 Multi-stripe Projectors Answer 3: time-coded light patterns best compromise between single stripes and stripe pattern Use a sequence of binary patterns (log N) images Each stripe has a unique binary illumination code Time Space

 images Each stripe has a unique binary")
17 Pattern projectors Answer 3: time-coded light patterns best compromise between single stripes and stripe pattern Use a sequence of binary patterns (log N) images Each stripe has a unique binary illumination code


18 Phase-shift projection Increasing the resolution project three phase-shifted sinusoidal patterns can be projected sequentially, or simultaneously in different colours the recorded intensities allow to compute the phase angle of a pixel within a wavelength
19 Phase-shift projection Phase angle from brightness values computing the phase angle from the three images although the method relies on brightness, the ambient light and the power of the projector need not be known observed intensities I = I base + I var cos(φ θ) I 0 = I base + I var cos(φ) I + = I base + I var cos(φ + θ)
20 Phase-shift projection Phase angle from brightness values computing the phase angle from the three images although the method relies on brightness, the ambient light and the power of the projector need not be known observed intensities I = I base + I var cos(φ θ) I 0 = I base + I var cos(φ) I + = I base + I var cos(φ + θ) removed dependence on I base removed dependence on I var I I + = 2I 0 I I + I base + I var cos(φ θ) I base I var cos(φ + θ) 2I base +2I var cos φ I base I var cos(φ θ) I base I var cos(φ + θ)
21 Phase-shift projection Phase angle from brightness values computing the phase angle from the three images although the method relies on brightness, the ambient light and the power of the projector need not be known observed intensities I = I base + I var cos(φ θ) I 0 = I base + I var cos(φ) I + = I base + I var cos(φ + θ) from trigonometry θ tan = 1 cos(θ) 2 sin(θ) cos(φ θ) = cos(φ) cos(θ) + sin(φ) sin(θ) cos(φ + θ) = cos(φ) cos(θ) sin(φ) sin(θ) cos(φ θ) cos(φ + θ) 2 cos φ cos(φ θ) cos(φ + θ) = 2 sin(φ) sin(θ) 2 cos(φ)(1 cos(θ))
22 Phase-shift projection Phase angle from brightness values computing the phase angle from the three images although the method relies on brightness, the ambient light and the power of the projector need not be known observed intensities I = I base + I var cos(φ θ) I 0 = I base + I var cos(φ) I + = I base + I var cos(φ + θ) from trigonometry θ tan = 1 cos(θ) 2 sin(θ) cos(φ θ) = cos(φ) cos(θ) + sin(φ) sin(θ) cos(φ + θ) = cos(φ) cos(θ) sin(φ) sin(θ) 2 sin(φ) sin(θ) 2 cos(φ)(1 cos(θ)) = tan(φ) sin(θ) 1 cos(θ) = tan(φ) tan(θ/2)
23 Phase-shift projection Phase angle from brightness values computing the phase angle from the three images although the method relies on brightness, the ambient light and the power of the projector need not be known observed intensities I = I base + I var cos(φ θ) I 0 = I base + I var cos(φ) I + = I base + I var cos(φ + θ) phase angle φ (0, 2π) = arctan I I + = tan(φ) 2I 0 I I + tan(θ/2) θ I I + tan 2 2I 0 I I +

24 Phase-shift projection Total phase the phase angle only determines the relative position within one cycle of the periodic sine wave need to know which stripe we are in (c.f. GPS phase ambiguity) achieved by ordering assumption, or combination with stereo
25 Phase-shift projection Total phase phase angle within a period from intensity number of period from stereo triangulation stereo matching is easy: only N possibilities absolute phase φ(x, y) =2π k(x, y)+φ (x, y) k [0...N 1] from stereo from phase-shift number of periods (stripes)

26 Phase-shift Projection Realtime in-hand scanning


27 Simple stripe projector Quite accurate systems surprisingly cheap cost <100 CHF: webcam, handheld line-laser, calibration board software freely available from TU Braunschweig




28 Industrial systems Many vendors big business - maybe the success story of image-based metrology



29 Consumer application Now people have it in their living room Xbox Kinect - periodic infrared dot pattern
30 Structured Light Advantages robust - solves the correspondence problem fast - instantaneous recording, real-time processing Limitations less flexible than passive sensing: needs specialised equipment and suitable environment Applications industrial inspection entertainment healthcare heritage documentation...
Structured Light II. Guido Gerig CS 6320, Spring (thanks: slides Prof. S. Narasimhan, CMU, Marc Pollefeys, UNC)
") Structured Light II Guido Gerig CS 6320, Spring 2013 (thanks: slides Prof. S. Narasimhan, CMU, Marc Pollefeys, UNC) http://www.cs.cmu.edu/afs/cs/academic/class/15385- s06/lectures/ppts/lec-17.ppt Variant
Structured Light II Guido Gerig CS 6320, Spring 2013 (thanks: slides Prof. S. Narasimhan, CMU, Marc Pollefeys, UNC) http://www.cs.cmu.edu/afs/cs/academic/class/15385- s06/lectures/ppts/lec-17.ppt Variant
3D Computer Vision. Structured Light I. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light I Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light I Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
L2 Data Acquisition. Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods
 Structured light Range images Shape from shading Other methods") L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
Active Stereo Vision. COMP 4900D Winter 2012 Gerhard Roth
 Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
Structured Light. Tobias Nöll Thanks to Marc Pollefeys, David Nister and David Lowe
 Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
3D Scanning. Qixing Huang Feb. 9 th Slide Credit: Yasutaka Furukawa
 3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
Depth Sensors Kinect V2 A. Fornaser
 Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Computer Vision. 3D acquisition
 è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
Introduction to 3D Machine Vision
 Introduction to 3D Machine Vision 1 Many methods for 3D machine vision Use Triangulation (Geometry) to Determine the Depth of an Object By Different Methods: Single Line Laser Scan Stereo Triangulation
Introduction to 3D Machine Vision 1 Many methods for 3D machine vision Use Triangulation (Geometry) to Determine the Depth of an Object By Different Methods: Single Line Laser Scan Stereo Triangulation
There are many cues in monocular vision which suggests that vision in stereo starts very early from two similar 2D images. Lets see a few...
 STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Outline. ETN-FPI Training School on Plenoptic Sensing
 Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
3D Photography: Active Ranging, Structured Light, ICP
 3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Time-of-flight basics
 Contents 1. Introduction... 2 2. Glossary of Terms... 3 3. Recovering phase from cross-correlation... 4 4. Time-of-flight operating principle: the lock-in amplifier... 6 5. The time-of-flight sensor pixel...
Contents 1. Introduction... 2 2. Glossary of Terms... 3 3. Recovering phase from cross-correlation... 4 4. Time-of-flight operating principle: the lock-in amplifier... 6 5. The time-of-flight sensor pixel...
3D Computer Vision. Depth Cameras. Prof. Didier Stricker. Oliver Wasenmüller
 3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Structured light , , Computational Photography Fall 2017, Lecture 27
 Structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 27 Course announcements Homework 5 has been graded. - Mean: 129. - Median:
Structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 27 Course announcements Homework 5 has been graded. - Mean: 129. - Median:
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Stereo and structured light
 Stereo and structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 20 Course announcements Homework 5 is still ongoing. - Make sure
Stereo and structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 20 Course announcements Homework 5 is still ongoing. - Make sure
Dense 3-D surface acquisition by structured light using off-the-shelf components
 Dense 3-D surface acquisition by structured light using off-the-shelf components Jens Gühring * Institute for Photogrammetry University of Stuttgart/Germany ABSTRACT This paper describes the implementation
Dense 3-D surface acquisition by structured light using off-the-shelf components Jens Gühring * Institute for Photogrammetry University of Stuttgart/Germany ABSTRACT This paper describes the implementation
3D Photography: Stereo
 3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
Depth. Common Classification Tasks. Example: AlexNet. Another Example: Inception. Another Example: Inception. Depth
 Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Today. Stereo (two view) reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography
 reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography") Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Epipolar geometry contd.
 Epipolar geometry contd. Estimating F 8-point algorithm The fundamental matrix F is defined by x' T Fx = 0 for any pair of matches x and x in two images. Let x=(u,v,1) T and x =(u,v,1) T, each match gives
Epipolar geometry contd. Estimating F 8-point algorithm The fundamental matrix F is defined by x' T Fx = 0 for any pair of matches x and x in two images. Let x=(u,v,1) T and x =(u,v,1) T, each match gives
3D Computer Vision 1
 3D Computer Vision 1 Multiview Stereo Multiview Stereo Multiview Stereo https://www.youtube.com/watch?v=ugkb7itpnae Shape from silhouette Shape from silhouette Shape from silhouette Shape from silhouette
3D Computer Vision 1 Multiview Stereo Multiview Stereo Multiview Stereo https://www.youtube.com/watch?v=ugkb7itpnae Shape from silhouette Shape from silhouette Shape from silhouette Shape from silhouette
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Project 2 due today Project 3 out today. Readings Szeliski, Chapter 10 (through 10.5)
") Announcements Stereo Project 2 due today Project 3 out today Single image stereogram, by Niklas Een Readings Szeliski, Chapter 10 (through 10.5) Public Library, Stereoscopic Looking Room, Chicago, by Phillips,
Announcements Stereo Project 2 due today Project 3 out today Single image stereogram, by Niklas Een Readings Szeliski, Chapter 10 (through 10.5) Public Library, Stereoscopic Looking Room, Chicago, by Phillips,
Lecture 17: Recursive Ray Tracing. Where is the way where light dwelleth? Job 38:19
 Lecture 17: Recursive Ray Tracing Where is the way where light dwelleth? Job 38:19 1. Raster Graphics Typical graphics terminals today are raster displays. A raster display renders a picture scan line
Lecture 17: Recursive Ray Tracing Where is the way where light dwelleth? Job 38:19 1. Raster Graphics Typical graphics terminals today are raster displays. A raster display renders a picture scan line
AUTOMATED CALIBRATION TECHNIQUE FOR PHOTOGRAMMETRIC SYSTEM BASED ON A MULTI-MEDIA PROJECTOR AND A CCD CAMERA
 AUTOMATED CALIBRATION TECHNIQUE FOR PHOTOGRAMMETRIC SYSTEM BASED ON A MULTI-MEDIA PROJECTOR AND A CCD CAMERA V. A. Knyaz * GosNIIAS, State Research Institute of Aviation System, 539 Moscow, Russia knyaz@gosniias.ru
AUTOMATED CALIBRATION TECHNIQUE FOR PHOTOGRAMMETRIC SYSTEM BASED ON A MULTI-MEDIA PROJECTOR AND A CCD CAMERA V. A. Knyaz * GosNIIAS, State Research Institute of Aviation System, 539 Moscow, Russia knyaz@gosniias.ru
3D data merging using Holoimage
 Iowa State University From the SelectedWorks of Song Zhang September, 27 3D data merging using Holoimage Song Zhang, Harvard University Shing-Tung Yau, Harvard University Available at: https://works.bepress.com/song_zhang/34/
Iowa State University From the SelectedWorks of Song Zhang September, 27 3D data merging using Holoimage Song Zhang, Harvard University Shing-Tung Yau, Harvard University Available at: https://works.bepress.com/song_zhang/34/
12/3/2009. What is Computer Vision? Applications. Application: Assisted driving Pedestrian and car detection. Application: Improving online search
 Introduction to Artificial Intelligence V22.0472-001 Fall 2009 Lecture 26: Computer Vision Rob Fergus Dept of Computer Science, Courant Institute, NYU Slides from Andrew Zisserman What is Computer Vision?
Introduction to Artificial Intelligence V22.0472-001 Fall 2009 Lecture 26: Computer Vision Rob Fergus Dept of Computer Science, Courant Institute, NYU Slides from Andrew Zisserman What is Computer Vision?
Information page for written examinations at Linköping University TER2
 Information page for written examinations at Linköping University Examination date 2016-08-19 Room (1) TER2 Time 8-12 Course code Exam code Course name Exam name Department Number of questions in the examination
Information page for written examinations at Linköping University Examination date 2016-08-19 Room (1) TER2 Time 8-12 Course code Exam code Course name Exam name Department Number of questions in the examination
Range Sensors (time of flight) (1)
 (1)") Range Sensors (time of flight) (1) Large range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic sensors, infra-red sensors
Range Sensors (time of flight) (1) Large range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic sensors, infra-red sensors
CONTENTS. High-Accuracy Stereo Depth Maps Using Structured Light. Yeojin Yoon
 [Paper Seminar 7] CVPR2003, Vol.1, pp.195-202 High-Accuracy Stereo Depth Maps Using Structured Light Daniel Scharstein Middlebury College Richard Szeliski Microsoft Research 2012. 05. 30. Yeojin Yoon Introduction
[Paper Seminar 7] CVPR2003, Vol.1, pp.195-202 High-Accuracy Stereo Depth Maps Using Structured Light Daniel Scharstein Middlebury College Richard Szeliski Microsoft Research 2012. 05. 30. Yeojin Yoon Introduction
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Advanced Vision Guided Robotics. David Bruce Engineering Manager FANUC America Corporation
 Advanced Vision Guided Robotics David Bruce Engineering Manager FANUC America Corporation Traditional Vision vs. Vision based Robot Guidance Traditional Machine Vision Determine if a product passes or
Advanced Vision Guided Robotics David Bruce Engineering Manager FANUC America Corporation Traditional Vision vs. Vision based Robot Guidance Traditional Machine Vision Determine if a product passes or
3D Sensing and Reconstruction Readings: Ch 12: , Ch 13: ,
 3D Sensing and Reconstruction Readings: Ch 12: 12.5-6, Ch 13: 13.1-3, 13.9.4 Perspective Geometry Camera Model Stereo Triangulation 3D Reconstruction by Space Carving 3D Shape from X means getting 3D coordinates
3D Sensing and Reconstruction Readings: Ch 12: 12.5-6, Ch 13: 13.1-3, 13.9.4 Perspective Geometry Camera Model Stereo Triangulation 3D Reconstruction by Space Carving 3D Shape from X means getting 3D coordinates
Unit 3 Multiple View Geometry
 Unit 3 Multiple View Geometry Relations between images of a scene Recovering the cameras Recovering the scene structure http://www.robots.ox.ac.uk/~vgg/hzbook/hzbook1.html 3D structure from images Recover
Unit 3 Multiple View Geometry Relations between images of a scene Recovering the cameras Recovering the scene structure http://www.robots.ox.ac.uk/~vgg/hzbook/hzbook1.html 3D structure from images Recover
Lecture 19: Depth Cameras. Visual Computing Systems CMU , Fall 2013
 Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Experiment 1: Diffraction from a Single Slit
 012-05880D Slit Accessory Experiment 1: Diffraction from a Single Slit Purpose Theory EQUIPMENT REQUIRED track and from the Basic Optics System (OS-8515) Diode Laser (OS-8525) Single Slit Disk (OS-8523)
012-05880D Slit Accessory Experiment 1: Diffraction from a Single Slit Purpose Theory EQUIPMENT REQUIRED track and from the Basic Optics System (OS-8515) Diode Laser (OS-8525) Single Slit Disk (OS-8523)
SL A Tordivel - Thor Vollset -Stereo Vision and structured illumination creates dense 3D Images Page 1
 Tordivel ASTORDIVEL 2000-2015 Scorpion Vision Software Scorpion Stinger are trademarks SL-2010-0001-A AS - Scorpion Visionand 8 and 3DMaMa Tordivel ASof Tordivel AS 2000-2010 Page 1 Stereo Vision and structured
Tordivel ASTORDIVEL 2000-2015 Scorpion Vision Software Scorpion Stinger are trademarks SL-2010-0001-A AS - Scorpion Visionand 8 and 3DMaMa Tordivel ASof Tordivel AS 2000-2010 Page 1 Stereo Vision and structured
Metrology and Sensing
 Metrology and Sensing Lecture 4: Fringe projection 2016-11-08 Herbert Gross Winter term 2016 www.iap.uni-jena.de 2 Preliminary Schedule No Date Subject Detailed Content 1 18.10. Introduction Introduction,
Metrology and Sensing Lecture 4: Fringe projection 2016-11-08 Herbert Gross Winter term 2016 www.iap.uni-jena.de 2 Preliminary Schedule No Date Subject Detailed Content 1 18.10. Introduction Introduction,
Flexible Calibration of a Portable Structured Light System through Surface Plane
 Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Computer Vision cmput 428/615
 Computer Vision cmput 428/615 Basic 2D and 3D geometry and Camera models Martin Jagersand The equation of projection Intuitively: How do we develop a consistent mathematical framework for projection calculations?
Computer Vision cmput 428/615 Basic 2D and 3D geometry and Camera models Martin Jagersand The equation of projection Intuitively: How do we develop a consistent mathematical framework for projection calculations?
Image Guided Phase Unwrapping for Real Time 3D Scanning
 Image Guided Phase Unwrapping for Real Time 3D Scanning Thilo Borgmann, Michael Tok and Thomas Sikora Communication Systems Group Technische Universität Berlin Abstract 3D reconstructions produced by active
Image Guided Phase Unwrapping for Real Time 3D Scanning Thilo Borgmann, Michael Tok and Thomas Sikora Communication Systems Group Technische Universität Berlin Abstract 3D reconstructions produced by active
ENGN D Photography / Spring 2018 / SYLLABUS
 ENGN 2502 3D Photography / Spring 2018 / SYLLABUS Description of the proposed course Over the last decade digital photography has entered the mainstream with inexpensive, miniaturized cameras routinely
ENGN 2502 3D Photography / Spring 2018 / SYLLABUS Description of the proposed course Over the last decade digital photography has entered the mainstream with inexpensive, miniaturized cameras routinely
Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by ) Readings Szeliski, Chapter 10 (through 10.5)
 Readings Szeliski, Chapter 10 (through 10.5)") Announcements Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by email) One-page writeup (from project web page), specifying:» Your team members» Project goals. Be specific.
Announcements Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by email) One-page writeup (from project web page), specifying:» Your team members» Project goals. Be specific.
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
3D Scanning. Lecture courtesy of Szymon Rusinkiewicz Princeton University
 3D Scanning Lecture courtesy of Szymon Rusinkiewicz Princeton University Computer Graphics Pipeline 3D Scanning Shape Motion Rendering Lighting and Reflectance Human time = expensive Sensors = cheap Computer
3D Scanning Lecture courtesy of Szymon Rusinkiewicz Princeton University Computer Graphics Pipeline 3D Scanning Shape Motion Rendering Lighting and Reflectance Human time = expensive Sensors = cheap Computer
Agenda. DLP 3D scanning Introduction DLP 3D scanning SDK Introduction Advance features for existing SDK
 Agenda DLP 3D scanning Introduction DLP 3D scanning SDK Introduction Advance features for existing SDK Increasing scanning speed from 20Hz to 400Hz Improve the lost point cloud 3D Machine Vision Applications:
Agenda DLP 3D scanning Introduction DLP 3D scanning SDK Introduction Advance features for existing SDK Increasing scanning speed from 20Hz to 400Hz Improve the lost point cloud 3D Machine Vision Applications:
Enhanced two-frequency phase-shifting method
 Research Article Vol. 55, No. 16 / June 1 016 / Applied Optics 4395 Enhanced two-frequency phase-shifting method JAE-SANG HYUN AND SONG ZHANG* School of Mechanical Engineering, Purdue University, West
Research Article Vol. 55, No. 16 / June 1 016 / Applied Optics 4395 Enhanced two-frequency phase-shifting method JAE-SANG HYUN AND SONG ZHANG* School of Mechanical Engineering, Purdue University, West
Interference. Electric fields from two different sources at a single location add together. The same is true for magnetic fields at a single location.
 Interference Electric fields from two different sources at a single location add together. The same is true for magnetic fields at a single location. Thus, interacting electromagnetic waves also add together.
Interference Electric fields from two different sources at a single location add together. The same is true for magnetic fields at a single location. Thus, interacting electromagnetic waves also add together.
EECS 442 Computer vision. Stereo systems. Stereo vision Rectification Correspondence problem Active stereo vision systems
 EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
Computer Science 426 Midterm 3/11/04, 1:30PM-2:50PM
 NAME: Login name: Computer Science 46 Midterm 3//4, :3PM-:5PM This test is 5 questions, of equal weight. Do all of your work on these pages (use the back for scratch space), giving the answer in the space
NAME: Login name: Computer Science 46 Midterm 3//4, :3PM-:5PM This test is 5 questions, of equal weight. Do all of your work on these pages (use the back for scratch space), giving the answer in the space
Structure from Motion. Prof. Marco Marcon
 Structure from Motion Prof. Marco Marcon Summing-up 2 Stereo is the most powerful clue for determining the structure of a scene Another important clue is the relative motion between the scene and (mono)
Structure from Motion Prof. Marco Marcon Summing-up 2 Stereo is the most powerful clue for determining the structure of a scene Another important clue is the relative motion between the scene and (mono)
Robust and Accurate One-shot 3D Reconstruction by 2C1P System with Wave Grid Pattern
 Robust and Accurate One-shot 3D Reconstruction by 2C1P System with Wave Grid Pattern Nozomu Kasuya Kagoshima University Kagoshima, Japan AIST Tsukuba, Japan nozomu.kasuya@aist.go.jp Ryusuke Sagawa AIST
Robust and Accurate One-shot 3D Reconstruction by 2C1P System with Wave Grid Pattern Nozomu Kasuya Kagoshima University Kagoshima, Japan AIST Tsukuba, Japan nozomu.kasuya@aist.go.jp Ryusuke Sagawa AIST
3D scanning. 3D scanning is a family of technologies created as a means of automatic measurement of geometric properties of objects.
 Acquiring 3D shape 3D scanning 3D scanning is a family of technologies created as a means of automatic measurement of geometric properties of objects. The produced digital model is formed by geometric
Acquiring 3D shape 3D scanning 3D scanning is a family of technologies created as a means of automatic measurement of geometric properties of objects. The produced digital model is formed by geometric
Rectification and Disparity
 Rectification and Disparity Nassir Navab Slides prepared by Christian Unger What is Stereo Vision? Introduction A technique aimed at inferring dense depth measurements efficiently using two cameras. Wide
Rectification and Disparity Nassir Navab Slides prepared by Christian Unger What is Stereo Vision? Introduction A technique aimed at inferring dense depth measurements efficiently using two cameras. Wide
Traditional pipeline for shape capture. Active range scanning. New pipeline for shape capture. Draw contours on model. Digitize lines with touch probe
 Traditional pipeline for shape capture Draw contours on model Active range scanning Digitize lines with touch probe Fit smooth surfaces CAD/CAM Texturing and animation 1 2 New pipeline for shape capture
Traditional pipeline for shape capture Draw contours on model Active range scanning Digitize lines with touch probe Fit smooth surfaces CAD/CAM Texturing and animation 1 2 New pipeline for shape capture
Sensing Deforming and Moving Objects with Commercial Off the Shelf Hardware
 Sensing Deforming and Moving Objects with Commercial Off the Shelf Hardware This work supported by: Philip Fong Florian Buron Stanford University Motivational Applications Human tissue modeling for surgical
Sensing Deforming and Moving Objects with Commercial Off the Shelf Hardware This work supported by: Philip Fong Florian Buron Stanford University Motivational Applications Human tissue modeling for surgical
Binocular stereo. Given a calibrated binocular stereo pair, fuse it to produce a depth image. Where does the depth information come from?
 Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
Optical Active 3D Scanning. Gianpaolo Palma
 Optical Active 3D Scanning Gianpaolo Palma 3D Scanning Taxonomy SHAPE ACQUISTION CONTACT NO-CONTACT NO DESTRUCTIVE DESTRUCTIVE X-RAY MAGNETIC OPTICAL ACOUSTIC CMM ROBOTIC GANTRY SLICING ACTIVE PASSIVE
Optical Active 3D Scanning Gianpaolo Palma 3D Scanning Taxonomy SHAPE ACQUISTION CONTACT NO-CONTACT NO DESTRUCTIVE DESTRUCTIVE X-RAY MAGNETIC OPTICAL ACOUSTIC CMM ROBOTIC GANTRY SLICING ACTIVE PASSIVE
Stereo vision. Many slides adapted from Steve Seitz
 Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV Venus de Milo
 Vision Sensing Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV 2007 Venus de Milo The Digital Michelangelo Project, Stanford How to sense 3D very accurately? How to sense
Vision Sensing Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV 2007 Venus de Milo The Digital Michelangelo Project, Stanford How to sense 3D very accurately? How to sense
Computer Vision. Coordinates. Prof. Flávio Cardeal DECOM / CEFET- MG.
 Computer Vision Coordinates Prof. Flávio Cardeal DECOM / CEFET- MG cardeal@decom.cefetmg.br Abstract This lecture discusses world coordinates and homogeneous coordinates, as well as provides an overview
Computer Vision Coordinates Prof. Flávio Cardeal DECOM / CEFET- MG cardeal@decom.cefetmg.br Abstract This lecture discusses world coordinates and homogeneous coordinates, as well as provides an overview
10/5/09 1. d = 2. Range Sensors (time of flight) (2) Ultrasonic Sensor (time of flight, sound) (1) Ultrasonic Sensor (time of flight, sound) (2) 4.1.
 (2) Ultrasonic Sensor (time of flight, sound) (1) Ultrasonic Sensor (time of flight, sound) (2) 4.1.") Range Sensors (time of flight) (1) Range Sensors (time of flight) (2) arge range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic
Range Sensors (time of flight) (1) Range Sensors (time of flight) (2) arge range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic
PHYSICS 1040L LAB LAB 7: DIFFRACTION & INTERFERENCE
 PHYSICS 1040L LAB LAB 7: DIFFRACTION & INTERFERENCE Object: To investigate the diffraction and interference of light, Apparatus: Lasers, optical bench, single and double slits. screen and mounts. Theory:
PHYSICS 1040L LAB LAB 7: DIFFRACTION & INTERFERENCE Object: To investigate the diffraction and interference of light, Apparatus: Lasers, optical bench, single and double slits. screen and mounts. Theory:
Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction
 Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction Carsten Rother 09/12/2013 Computer Vision I: Multi-View 3D reconstruction Roadmap this lecture Computer Vision I: Multi-View
Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction Carsten Rother 09/12/2013 Computer Vision I: Multi-View 3D reconstruction Roadmap this lecture Computer Vision I: Multi-View
SM 2. Date: Section: Objective: The Pythagorean Theorem: In a triangle, or
 SM 2 Date: Section: Objective: The Pythagorean Theorem: In a triangle, or. It doesn t matter which leg is a and which leg is b. The hypotenuse is the side across from the right angle. To find the length
SM 2 Date: Section: Objective: The Pythagorean Theorem: In a triangle, or. It doesn t matter which leg is a and which leg is b. The hypotenuse is the side across from the right angle. To find the length
Stereo Wrap + Motion. Computer Vision I. CSE252A Lecture 17
 Stereo Wrap + Motion CSE252A Lecture 17 Some Issues Ambiguity Window size Window shape Lighting Half occluded regions Problem of Occlusion Stereo Constraints CONSTRAINT BRIEF DESCRIPTION 1-D Epipolar Search
Stereo Wrap + Motion CSE252A Lecture 17 Some Issues Ambiguity Window size Window shape Lighting Half occluded regions Problem of Occlusion Stereo Constraints CONSTRAINT BRIEF DESCRIPTION 1-D Epipolar Search
Embedded Phase Shifting: Robust Phase Shifting with Embedded Signals
 Embedded Phase Shifting: Robust Phase Shifting with Embedded Signals Daniel Moreno Kilho Son Gabriel Taubin Brown University, Providence, RI, USA {daniel moreno, kilho son, gabriel taubin}@brown.edu Abstract
Embedded Phase Shifting: Robust Phase Shifting with Embedded Signals Daniel Moreno Kilho Son Gabriel Taubin Brown University, Providence, RI, USA {daniel moreno, kilho son, gabriel taubin}@brown.edu Abstract
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Precise Dynamic Measurement of Structures Automatically Utilizing Adaptive Targeting
 Precise Dynamic Measurement of Structures Automatically Utilizing Adaptive Targeting Gary Robertson ShapeQuest Inc. Ottawa, Canada gary@shapecapture.com Commission V KEY WORDS: Automated measurement, binary
Precise Dynamic Measurement of Structures Automatically Utilizing Adaptive Targeting Gary Robertson ShapeQuest Inc. Ottawa, Canada gary@shapecapture.com Commission V KEY WORDS: Automated measurement, binary
COMP30019 Graphics and Interaction Ray Tracing
 COMP30019 Graphics and Interaction Ray Tracing Department of Computer Science and Software Engineering The Lecture outline Ray tracing Recursive Ray Tracing Binary Space Partition (BSP) Trees Refraction
COMP30019 Graphics and Interaction Ray Tracing Department of Computer Science and Software Engineering The Lecture outline Ray tracing Recursive Ray Tracing Binary Space Partition (BSP) Trees Refraction
Recap from Previous Lecture
 Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Handheld Augmented Reality. Reto Lindegger
 Handheld Augmented Reality Reto Lindegger lreto@ethz.ch 1 AUGMENTED REALITY 2 A Definition Three important characteristics: Combines real and virtual environment Interactive in real-time Registered in
Handheld Augmented Reality Reto Lindegger lreto@ethz.ch 1 AUGMENTED REALITY 2 A Definition Three important characteristics: Combines real and virtual environment Interactive in real-time Registered in
Chapter 37. Wave Optics
 Chapter 37 Wave Optics Wave Optics Wave optics is a study concerned with phenomena that cannot be adequately explained by geometric (ray) optics. Sometimes called physical optics These phenomena include:
Chapter 37 Wave Optics Wave Optics Wave optics is a study concerned with phenomena that cannot be adequately explained by geometric (ray) optics. Sometimes called physical optics These phenomena include:
Unit 2: Trigonometry. This lesson is not covered in your workbook. It is a review of trigonometry topics from previous courses.
 Unit 2: Trigonometry This lesson is not covered in your workbook. It is a review of trigonometry topics from previous courses. Pythagorean Theorem Recall that, for any right angled triangle, the square
Unit 2: Trigonometry This lesson is not covered in your workbook. It is a review of trigonometry topics from previous courses. Pythagorean Theorem Recall that, for any right angled triangle, the square
Tecnologie per la ricostruzione di modelli 3D da immagini. Marco Callieri ISTI-CNR, Pisa, Italy
 Tecnologie per la ricostruzione di modelli 3D da immagini Marco Callieri ISTI-CNR, Pisa, Italy Who am I? Marco Callieri PhD in computer science Always had the like for 3D graphics... Researcher at the
Tecnologie per la ricostruzione di modelli 3D da immagini Marco Callieri ISTI-CNR, Pisa, Italy Who am I? Marco Callieri PhD in computer science Always had the like for 3D graphics... Researcher at the
Design and Calibration of a Network of RGB-D Sensors for Robotic Applications over Large Workspaces
 Design and Calibration of a Network of RGB-D Sensors for Robotic Applications over Large Workspaces By: Rizwan Macknojia A thesis submitted to the Faculty of Graduate and Postdoctoral Studies In partial
Design and Calibration of a Network of RGB-D Sensors for Robotic Applications over Large Workspaces By: Rizwan Macknojia A thesis submitted to the Faculty of Graduate and Postdoctoral Studies In partial
UNIT 102-9: INTERFERENCE AND DIFFRACTION
 Name St.No. - Date(YY/MM/DD) / / Section Group # UNIT 102-9: INTERFERENCE AND DIFFRACTION Patterns created by interference of light in a thin film. OBJECTIVES 1. Understand the creation of double-slit
Name St.No. - Date(YY/MM/DD) / / Section Group # UNIT 102-9: INTERFERENCE AND DIFFRACTION Patterns created by interference of light in a thin film. OBJECTIVES 1. Understand the creation of double-slit
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
3D Object Representations. COS 526, Fall 2016 Princeton University
 3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
Extraction of surface normal and index of refraction using a pair of passive infrared polarimetric sensors
 Extraction of surface normal and index of refraction using a pair of passive infrared polarimetric sensors Firooz Sadjadi Lockheed Martin Corporation Saint Paul, Minnesota firooz.sadjadi@ieee.org Farzad
Extraction of surface normal and index of refraction using a pair of passive infrared polarimetric sensors Firooz Sadjadi Lockheed Martin Corporation Saint Paul, Minnesota firooz.sadjadi@ieee.org Farzad
Camera Calibration and Light Source Estimation from Images with Shadows
 Camera Calibration and Light Source Estimation from Images with Shadows Xiaochun Cao and Mubarak Shah Computer Vision Lab, University of Central Florida, Orlando, FL, 32816 Abstract In this paper, we describe
Camera Calibration and Light Source Estimation from Images with Shadows Xiaochun Cao and Mubarak Shah Computer Vision Lab, University of Central Florida, Orlando, FL, 32816 Abstract In this paper, we describe
Overview of Active Vision Techniques
 SIGGRAPH 99 Course on 3D Photography Overview of Active Vision Techniques Brian Curless University of Washington Overview Introduction Active vision techniques Imaging radar Triangulation Moire Active
SIGGRAPH 99 Course on 3D Photography Overview of Active Vision Techniques Brian Curless University of Washington Overview Introduction Active vision techniques Imaging radar Triangulation Moire Active
Problem Solving 10: Double-Slit Interference
 MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of hysics roblem Solving 10: Double-Slit Interference OBJECTIVES 1. To introduce the concept of interference. 2. To find the conditions for constructive
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of hysics roblem Solving 10: Double-Slit Interference OBJECTIVES 1. To introduce the concept of interference. 2. To find the conditions for constructive
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo In this lecture, we ll first discuss another framework for describing stereo systems called active stereo, and then introduce the problem of volumetric stereo,
Lecture 8 Active stereo & Volumetric stereo In this lecture, we ll first discuss another framework for describing stereo systems called active stereo, and then introduce the problem of volumetric stereo,
3D Modeling of Objects Using Laser Scanning
 1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
2 Depth Camera Assessment
 2 Depth Camera Assessment The driving question of this chapter is how competitive cheap consumer depth cameras, namely the Microsoft Kinect and the SoftKinetic DepthSense, are compared to state-of-the-art
2 Depth Camera Assessment The driving question of this chapter is how competitive cheap consumer depth cameras, namely the Microsoft Kinect and the SoftKinetic DepthSense, are compared to state-of-the-art
Comments on Consistent Depth Maps Recovery from a Video Sequence
 Comments on Consistent Depth Maps Recovery from a Video Sequence N.P. van der Aa D.S. Grootendorst B.F. Böggemann R.T. Tan Technical Report UU-CS-2011-014 May 2011 Department of Information and Computing
Comments on Consistent Depth Maps Recovery from a Video Sequence N.P. van der Aa D.S. Grootendorst B.F. Böggemann R.T. Tan Technical Report UU-CS-2011-014 May 2011 Department of Information and Computing
Single slit diffraction
 Single slit diffraction Book page 364-367 Review double slit Core Assume paths of the two rays are parallel This is a good assumption if D >>> d PD = R 2 R 1 = dsin θ since sin θ = PD d Constructive interference
Single slit diffraction Book page 364-367 Review double slit Core Assume paths of the two rays are parallel This is a good assumption if D >>> d PD = R 2 R 1 = dsin θ since sin θ = PD d Constructive interference
Chapter 37. Interference of Light Waves
 Chapter 37 Interference of Light Waves Wave Optics Wave optics is a study concerned with phenomena that cannot be adequately explained by geometric (ray) optics These phenomena include: Interference Diffraction
Chapter 37 Interference of Light Waves Wave Optics Wave optics is a study concerned with phenomena that cannot be adequately explained by geometric (ray) optics These phenomena include: Interference Diffraction
Math Boot Camp: Coordinate Systems
 Math Boot Camp: Coordinate Systems You can skip this boot camp if you can answer the following question: Staying on a sphere of radius R, what is the shortest distance between the point (0, 0, R) on the
Math Boot Camp: Coordinate Systems You can skip this boot camp if you can answer the following question: Staying on a sphere of radius R, what is the shortest distance between the point (0, 0, R) on the
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
X-ray tomography. X-ray tomography. Applications in Science. X-Rays. Notes. Notes. Notes. Notes
 X-ray tomography Important application of the Fast Fourier transform: X-ray tomography. Also referred to as CAT scan (Computerized Axial Tomography) X-ray tomography This has revolutionized medical diagnosis.
X-ray tomography Important application of the Fast Fourier transform: X-ray tomography. Also referred to as CAT scan (Computerized Axial Tomography) X-ray tomography This has revolutionized medical diagnosis.