Computer Vision. 3D acquisition
|
|
|
- Jeremy Lyons
- 5 years ago
- Views:
Transcription

1 è Computer 3D acquisition
2 Acknowledgement Courtesy of Prof. Luc Van Gool
3 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional uni-directional multi-directional Shape-from - texture - contour - silhouettes - defocus - shading Stereo Time-of-flight Line scanning Structured light Photom. stereo
4 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional uni-directional multi-directional Shape-from - texture - contour - silhouettes - defocus - shading Stereo Time-of-flight Line scanning Structured light Photom. stereo

5 è Computer Stereo The underlying principle is triangulation :
6 è Computer (Passive) stereo Simple configuration :
7 A simple stereo setup identical cameras coplanar image planes è aligned x-axes

8 è Computer A simple stereo setup The HARD problem is finding the correspondences Notice : no reconstruction for the untextured back wall...
9 Correspondence problem : methods 1. correlation deformations small window noise! large window bad localisation 2. feature-based mainly edges and corners sparse depth image è 3. regularisation methods







10 3D city models

11 3D city models ground level Mobile mapping example for measuring




12 Uncalibrated reconstruction Tracking and Calibration Dense depth estimation 3D surface modeling Points and cameras Depth map 3D models



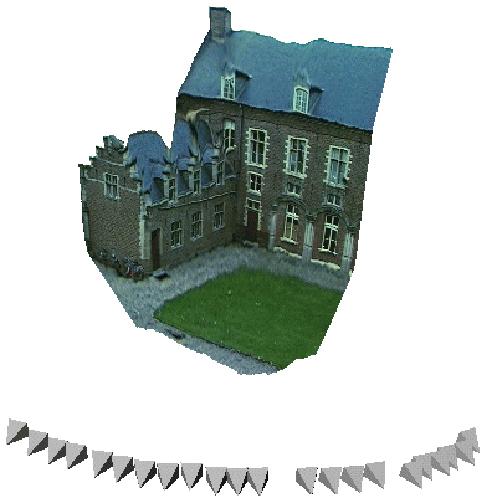
13 Uncalibrated reconstruction

14 Uncalibrated reconstruction - example è Univ. of Leuven

15 Shape-from-stills
16 Shape-from-stills Webservice, free for non-commercial use
17 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional uni-directional multi-directional Shape-from - texture - contour - silhouettes - defocus - shading Stereo Time-of-flight Line scanning Structured light Photom. stereo
18 LASER Active triangulation INTERSECTION LASER RAY AND VIEWING RAY = INTERSECTION LASER RAY AND OBJECT SURFACE LASER SPOT SEEN BY THE CAMERA CAMERA S CENTER OF PROJECTION
19 Active triangulation LASER? NO INTERSECTION IF SOME ERRORS IN THE LINE EQS! LASER SPOT SEEN BY THE CAMERA CAMERA S CENTER OF PROJECTION
20 Active triangulation LASER? NO INTERSECTION IF SOME ERRORS IN THE LINE EQS! Two lines do normally not intersect Noise disrupts triangulation LASER SPOT SEEN BY THE CAMERA CAMERA S CENTER OF PROJECTION
21 Active triangulation LASER WITH CYLINDRICAL LENSE IN FRONT INTERSECTION LASER PLANE & OBJECT SURFACE INTERSECTION LASER PLANE & VIEWING RAY POINT ON THE LASER LINE SEEN BY THE CAMERA CAMERA S CENTER OF PROJECTION
22 Active triangulation LASER WITH CYLINDRICAL LENSE IN FRONT INTERSECTION LASER PLANE & OBJECT SURFACE INTERSECTION LASER PLANE & VIEWING RAY A plane and a line do normally intersect Noise has little Influence on the triangulation POINT ON THE LASER LINE SEEN BY THE CAMERA CAMERA S CENTER OF PROJECTION

23 Active triangulation

24 Active triangulation Triangulation à 3D measurements Camera Projector

25 Active triangulation Camera image
26 Active triangulation



27 è Computer Active triangulation Example 1 Cyberware laser scanners Desktop model for small objects Medium-sized objects Body scanner Head scanner
28 è Computer Active triangulation Example 2 Minolta Portable desktop model
29 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional uni-directional multi-directional Shape-from - texture - contour - silhouettes - defocus - shading Stereo Time-of-flight Line scanning Structured light Photom. stereo
30 Structured Light Reconstruction Avoid problems due to correspondence Avoid problems due to surface appearance Much more accurate Very popular in industrial settings Reading: Marc Levoy s webpages (Stanford) Katsu Ikeuchi s webpages (U Tokyo) Peter Allen s webpages (Columbia)
31 Stereo Triangulation I J Correspondence is hard!
32 Structured Light Triangulation I J Correspondence becomes easier!

33 Structured Light Any spatio-temporal pattern of light projected on a surface (or volume). Cleverly illuminate the scene to extract scene properties (eg., 3D). Avoids problems of 3D estimation in scenes with complex texture/brdfs. Very popular in vision and successful in industrial applications (parts assembly, inspection, etc).
34 Light Stripe Scanning Single Stripe Light plane Source Camera Surface Optical triangulation Project a single stripe of laser light Scan it across the surface of the object This is a very precise version of structured light scanning Good for high resolution 3D, but needs many images and takes time
35 Triangulation Light Plane Ax By Cz D 0 Object Laser Camera Project laser stripe onto object
36 Triangulation Light Plane Ax By Cz D 0 Object Laser Image Point x ( ', y') Camera Depth from ray-plane triangulation: Intersect camera ray with light plane x y x' z / y' z / f f z Df Ax' By' Cf

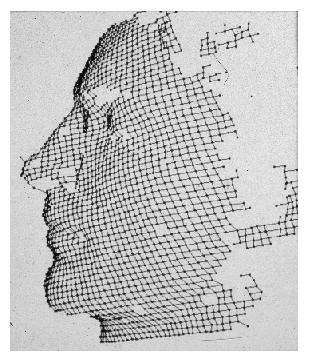
37 Example: Laser scanner Cyberware face and head scanner + very accurate < 0.01 mm more than 10sec per scan

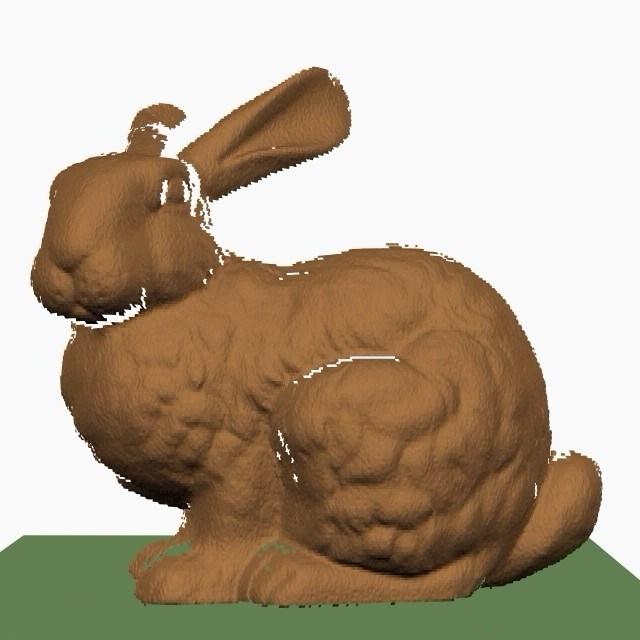
38 Example: Laser scanner Digital Michelangelo Project


")
39 Portable 3D laser scanner (this one by Minolta)
40 Faster Acquisition? Project multiple stripes simultaneously Correspondence problem: which stripe is which? Common types of patterns: Binary coded light striping Gray/color coded light striping
41 Binary Coding Faster: n 2 1 stripes in n images. Projected over time Example: 3 binary-encoded patterns which allows the measuring surface to be divided in 8 sub-regions Pattern 3 Pattern 2 Pattern 1
42 Binary Coding Assign each stripe a unique illumination code over time [Posdamer 82] Time Space



43 Binary Coding Example: 7 binary patterns proposed by Posdamer & Altschuler Projected over time Pattern 3 Pattern 2 Codeword of this píxel: identifies the corresponding pattern stripe Pattern 1



44 More complex patterns Works despite complex appearances Works in real-time and on dynamic scenes Need very few images (one or two). But needs a more complex correspondence algorithm Zhang et al
45 Continuum of Triangulation Methods Multi-stripe Multi-frame Single-stripe Single-frame Slow, robust Fast, fragile

46 è Computer One-shot implementation KULeuven 81: checkerboard pattern with column code example :

47 è Computer 3D reconstruction for the example

48 An application in agriculture


49 One-shot 3D acquisition Leuven ShapeCam


50 Shape + texture often needed Higher resolution Texture is also extracted

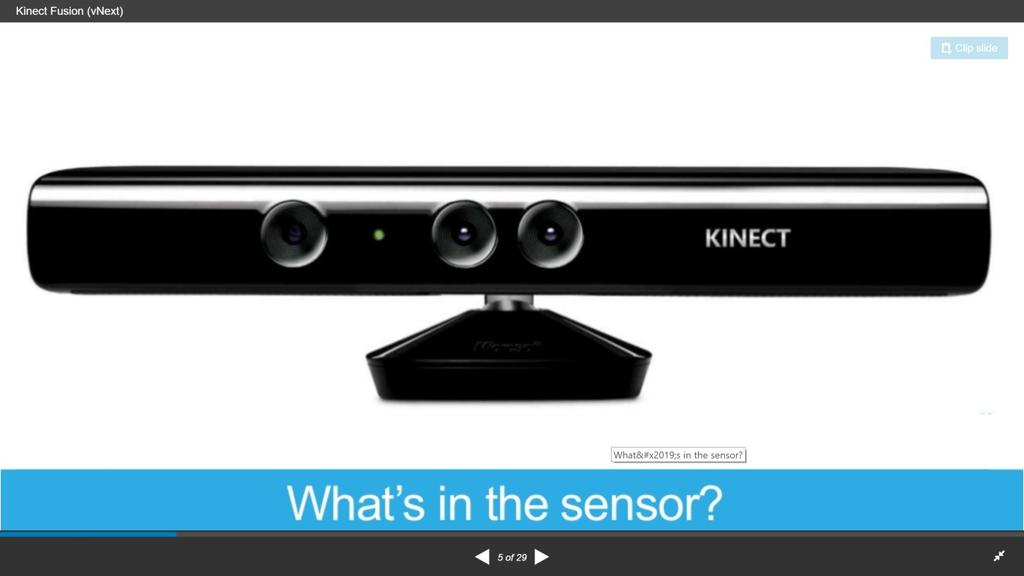
51 è Computer Active triangulation Recent, commercial example Kinect 3D camera, affordable and compact solution by Microsoft. Projects a 2D point pattern in the NIR, to make it invisible to the human eye

52 è Computer Kinect: 9x9 patches with locally unique code
53
54

55

56 Inside the Kinect Depth Camera

57 Kinect as one-shot, low-cost scanner Excerpt from the dense NIR dot pattern:

58 Face animation - input

59 Face animation replay + effects
60 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional uni-directional multi-directional Shape-from - texture - contour - silhouettes - defocus - shading Stereo Time-of-flight Line scanning Structured light Photom. stereo
61 Time-of-flight measurement of the time a modulated light signal needs to travel before returning to the sensor this time is proportional to the distance waves : 1. radar 2. sonar 3. optical radar low freq. electromagnetic acoustic waves optical waves è working principles : 1. pulsed 2. phase shifts




62 è Computer Time-of-flight Example 1: Cyrax Example 2: Riegl
63 Time-of-flight: example Cyrax 3D Laser Mapping System



64 Cyrax Accurate, detailed, fast measuring 2D / 3D CAD Integrated modeling
65 Cyrax (now Leica) 3 Components Laser Scanner Laptop Computer & Software Electronics & Power Supply Field Portable
66 Pulsed laser (time-of-flight) No reflectors needed Cyrax 2mm - 6mm accuracy Distance = C x T 2
67 Laser sweeps over surface 800 pts/sec 2mm min pt-to-pt spacing Cyrax 40ºx40º Field-of-view (max)


68 Up to 100m range (50m rec) Cyrax Eye-safe Class 2

69 Step 1: Target the structure



70 Step 2: Scan the structure

71 Step 3: Model fitting in-the-field
72 Result

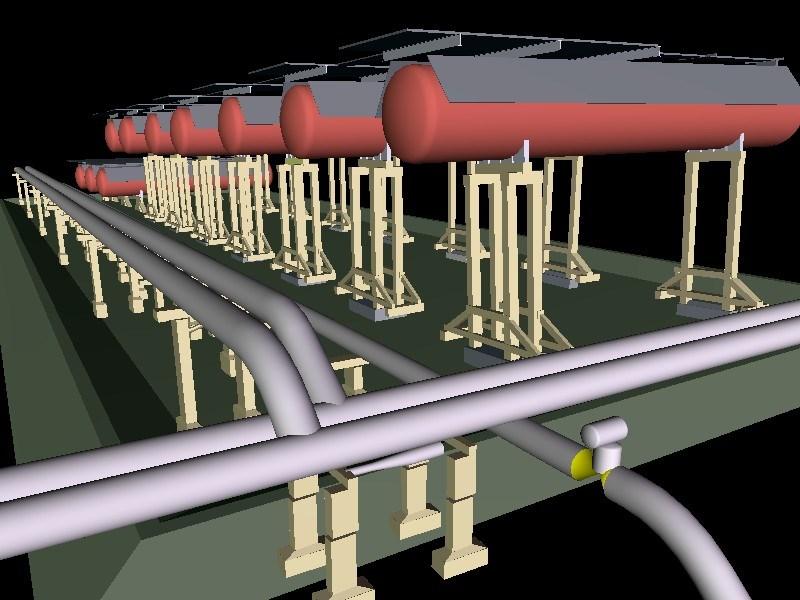
73 Project: As-built of Chevron hydrocarbon plant 400 x500 area 10 vessels; 5 pumps 6,000 objects 81 scans from 30 tripod locations Cyrax field time = 50 hrs
74 Man-hours Computer Cost Benefits Measuring & modeling Cyrax Manual Added Value Benefits Greater detail & no errors Higher accuracy Fewer construction errors 6 week schedule savings

75 Application Modeling movie sets Image courtesy of Tippett Studio

76 Lidar data with Riegl LMS-Z390i courtesy of RWTHAachen, L. Kobbelt et al.

77 Comparison Lidar - passive Image courtesy of Tippett Studio
78 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional uni-directional multi-directional Shape-from Stereo Time-of-flight Line scanning - texture Structured light - contour - silhouettes - defocus - shading Photom. stereo
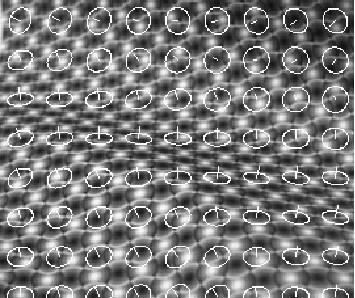
79 è Computer Shape-from-texture assumes a slanted and tilted surface to have a homogeneous texture inhomogeneity is regarded as the result of projection e.g. anisotropy in the statistics of edge orientations orientations deprojecting to maximally isotropic texture
80 è
81 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional uni-directional multi-directional Shape-from - texture - contour - silhouettes - defocus - shading Stereo Time-of-flight Line scanning Structured light Photom. stereo
82 Shape-from-silhouettes









83 Shape from silhouettes - uncalibrated tracking of tur ntable rotation volumetric modeling from silhouettes triangular textured surface mesh Turntable sequence Camera tracking VRML model
84 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional uni-directional multi-directional Shape-from - texture - contour - silhouettes Stereo Time-of-flight Line scanning Structured light Photom. stereo - defocus - shading
85 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional uni-directional multi-directional Shape-from - texture - contour - silhouettes - defocus Stereo Time-of-flight Line scanning Structured light Photom. stereo - shading

86

87 PAMI, Stephen Soatto, UCLA, 2005

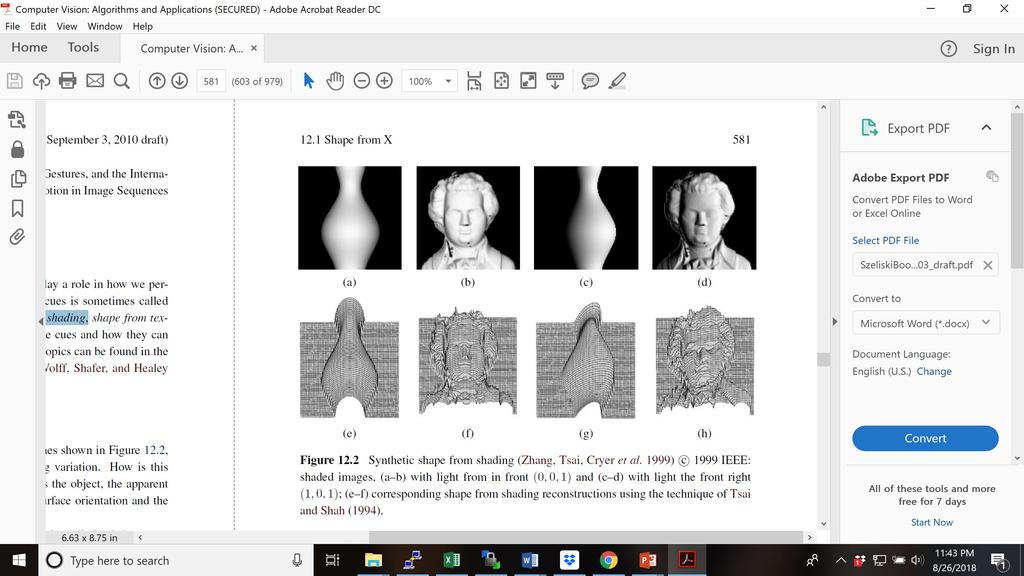
88 è Computer Shape-from-shading Uses directional lighting, often with known direction local intensity is brought into correspondence with orientation via reflectance maps orientation of an isolated patch cannot be derived uniquely extra assumptions on surface smoothness and known normals at the rim
89
90 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional uni-directional multi-directional Shape-from - texture - contour - silhouettes - defocus - shading Stereo Time-of-flight Line scanning Structured light Photom. stereo
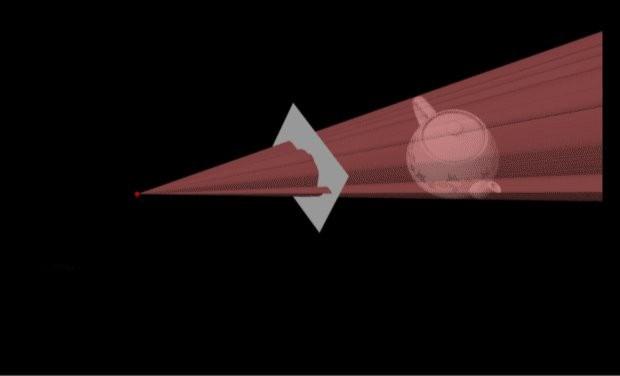
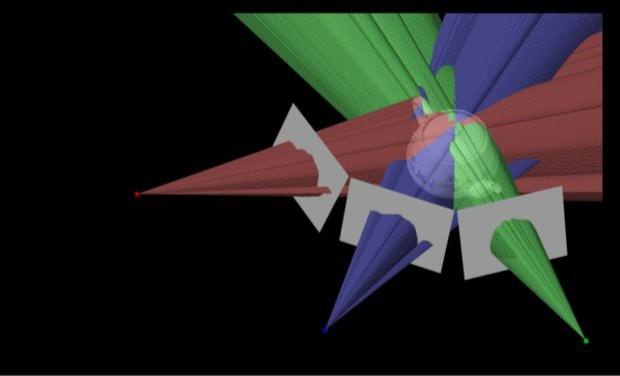
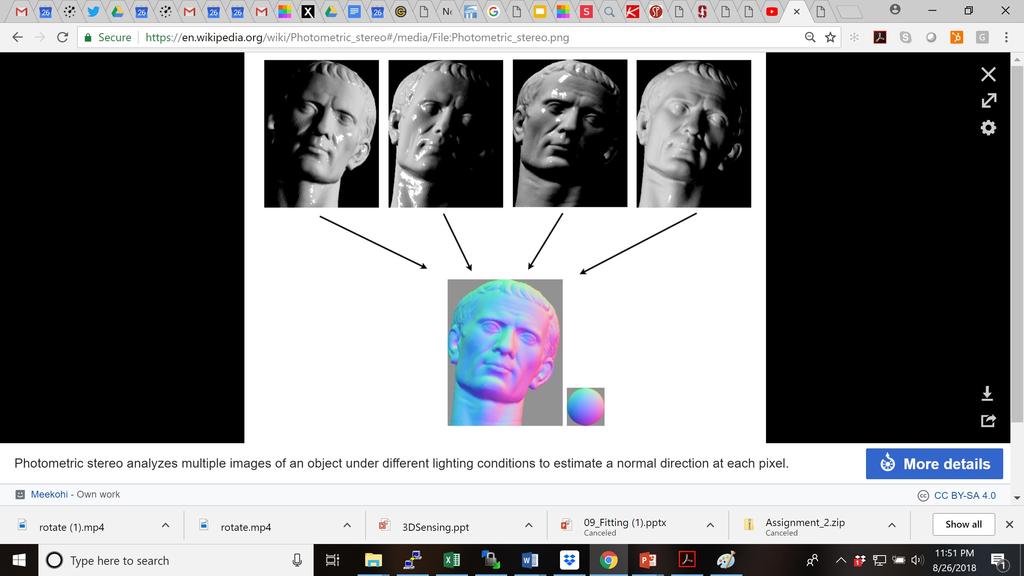
91 è Computer Photometric stereo Photometric stereo is a technique in computer vision for estimating the surface normals of objects by observing that object under different lighting conditions. It is based on the fact that the amount of light reflected by a surface is dependent on the orientation of the surface in relation to the light source and the observer. [1] By measuring the amount of light reflected into a camera, the space of possible surface orientations is limited. Given enough light sources from different angles, the surface orientation may be constrained to a single orientation or even overconstrained.
92 Mini-dome for photometric stereo Instead of working with multi-directional light applied simultaneously with the colour trick, one can also project from many directions in sequence
93

94 Strongest 3D cues for us are 2D...
L2 Data Acquisition. Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods
 Structured light Range images Shape from shading Other methods") L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
Structured light , , Computational Photography Fall 2017, Lecture 27
 Structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 27 Course announcements Homework 5 has been graded. - Mean: 129. - Median:
Structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 27 Course announcements Homework 5 has been graded. - Mean: 129. - Median:
Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV Venus de Milo
 Vision Sensing Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV 2007 Venus de Milo The Digital Michelangelo Project, Stanford How to sense 3D very accurately? How to sense
Vision Sensing Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV 2007 Venus de Milo The Digital Michelangelo Project, Stanford How to sense 3D very accurately? How to sense
Stereo and structured light
 Stereo and structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 20 Course announcements Homework 5 is still ongoing. - Make sure
Stereo and structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 20 Course announcements Homework 5 is still ongoing. - Make sure
3D Scanning. Qixing Huang Feb. 9 th Slide Credit: Yasutaka Furukawa
 3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
3D Photography: Stereo
 3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
Overview of Active Vision Techniques
 SIGGRAPH 99 Course on 3D Photography Overview of Active Vision Techniques Brian Curless University of Washington Overview Introduction Active vision techniques Imaging radar Triangulation Moire Active
SIGGRAPH 99 Course on 3D Photography Overview of Active Vision Techniques Brian Curless University of Washington Overview Introduction Active vision techniques Imaging radar Triangulation Moire Active
3D Photography: Active Ranging, Structured Light, ICP
 3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
Structured Light. Tobias Nöll Thanks to Marc Pollefeys, David Nister and David Lowe
 Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
Outline. ETN-FPI Training School on Plenoptic Sensing
 Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Traditional pipeline for shape capture. Active range scanning. New pipeline for shape capture. Draw contours on model. Digitize lines with touch probe
 Traditional pipeline for shape capture Draw contours on model Active range scanning Digitize lines with touch probe Fit smooth surfaces CAD/CAM Texturing and animation 1 2 New pipeline for shape capture
Traditional pipeline for shape capture Draw contours on model Active range scanning Digitize lines with touch probe Fit smooth surfaces CAD/CAM Texturing and animation 1 2 New pipeline for shape capture
The main problem of photogrammetry
 Structured Light Structured Light The main problem of photogrammetry to recover shape from multiple views of a scene, we need to find correspondences between the images the matching/correspondence problem
Structured Light Structured Light The main problem of photogrammetry to recover shape from multiple views of a scene, we need to find correspondences between the images the matching/correspondence problem
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Other Reconstruction Techniques
 Other Reconstruction Techniques Ruigang Yang CS 684 CS 684 Spring 2004 1 Taxonomy of Range Sensing From Brain Curless, SIGGRAPH 00 Lecture notes CS 684 Spring 2004 2 Taxonomy of Range Scanning (cont.)
Other Reconstruction Techniques Ruigang Yang CS 684 CS 684 Spring 2004 1 Taxonomy of Range Sensing From Brain Curless, SIGGRAPH 00 Lecture notes CS 684 Spring 2004 2 Taxonomy of Range Scanning (cont.)
3D Computer Vision. Structured Light I. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light I Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light I Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Structured Light II. Guido Gerig CS 6320, Spring (thanks: slides Prof. S. Narasimhan, CMU, Marc Pollefeys, UNC)
") Structured Light II Guido Gerig CS 6320, Spring 2013 (thanks: slides Prof. S. Narasimhan, CMU, Marc Pollefeys, UNC) http://www.cs.cmu.edu/afs/cs/academic/class/15385- s06/lectures/ppts/lec-17.ppt Variant
Structured Light II Guido Gerig CS 6320, Spring 2013 (thanks: slides Prof. S. Narasimhan, CMU, Marc Pollefeys, UNC) http://www.cs.cmu.edu/afs/cs/academic/class/15385- s06/lectures/ppts/lec-17.ppt Variant
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Active Stereo Vision. COMP 4900D Winter 2012 Gerhard Roth
 Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
3D Object Representations. COS 526, Fall 2016 Princeton University
 3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
There are many cues in monocular vision which suggests that vision in stereo starts very early from two similar 2D images. Lets see a few...
 STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
Sensing Deforming and Moving Objects with Commercial Off the Shelf Hardware
 Sensing Deforming and Moving Objects with Commercial Off the Shelf Hardware This work supported by: Philip Fong Florian Buron Stanford University Motivational Applications Human tissue modeling for surgical
Sensing Deforming and Moving Objects with Commercial Off the Shelf Hardware This work supported by: Philip Fong Florian Buron Stanford University Motivational Applications Human tissue modeling for surgical
Depth. Common Classification Tasks. Example: AlexNet. Another Example: Inception. Another Example: Inception. Depth
 Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
EECS 442 Computer vision. Stereo systems. Stereo vision Rectification Correspondence problem Active stereo vision systems
 EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
Stereo vision. Many slides adapted from Steve Seitz
 Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Perspective projection
 Sensors Ioannis Stamos Perspective projection Pinhole & the Perspective Projection (x,y) SCENE SCREEN Is there an image being formed on the screen?
Sensors Ioannis Stamos Perspective projection Pinhole & the Perspective Projection (x,y) SCENE SCREEN Is there an image being formed on the screen?
3D Modeling of Objects Using Laser Scanning
 1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Computational Optical Imaging - Optique Numerique. -- Active Light 3D--
 Computational Optical Imaging - Optique Numerique -- Active Light 3D-- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Overview 3D scanning techniques Laser triangulation Structured light Photometric
Computational Optical Imaging - Optique Numerique -- Active Light 3D-- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Overview 3D scanning techniques Laser triangulation Structured light Photometric
Optical Active 3D Scanning. Gianpaolo Palma
 Optical Active 3D Scanning Gianpaolo Palma 3D Scanning Taxonomy SHAPE ACQUISTION CONTACT NO-CONTACT NO DESTRUCTIVE DESTRUCTIVE X-RAY MAGNETIC OPTICAL ACOUSTIC CMM ROBOTIC GANTRY SLICING ACTIVE PASSIVE
Optical Active 3D Scanning Gianpaolo Palma 3D Scanning Taxonomy SHAPE ACQUISTION CONTACT NO-CONTACT NO DESTRUCTIVE DESTRUCTIVE X-RAY MAGNETIC OPTICAL ACOUSTIC CMM ROBOTIC GANTRY SLICING ACTIVE PASSIVE
Depth Camera for Mobile Devices
 Depth Camera for Mobile Devices Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Stereo Cameras Structured Light Cameras Time of Flight (ToF) Camera Inferring 3D Points Given we have
Depth Camera for Mobile Devices Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Stereo Cameras Structured Light Cameras Time of Flight (ToF) Camera Inferring 3D Points Given we have
Making Machines See. Roberto Cipolla Department of Engineering. Research team
 Making Machines See Roberto Cipolla Department of Engineering Research team http://www.eng.cam.ac.uk/~cipolla/people.html Cognitive Systems Engineering Cognitive Systems Engineering Introduction Making
Making Machines See Roberto Cipolla Department of Engineering Research team http://www.eng.cam.ac.uk/~cipolla/people.html Cognitive Systems Engineering Cognitive Systems Engineering Introduction Making
3D photography. Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/5/15
 3D photography Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/5/15 with slides by Szymon Rusinkiewicz, Richard Szeliski, Steve Seitz and Brian Curless Announcements Project #3 is due on 5/20.
3D photography Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/5/15 with slides by Szymon Rusinkiewicz, Richard Szeliski, Steve Seitz and Brian Curless Announcements Project #3 is due on 5/20.
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
CSc Topics in Computer Graphics 3D Photography
 CSc 83010 Topics in Computer Graphics 3D Photography Tuesdays 11:45-1:45 1:45 Room 3305 Ioannis Stamos istamos@hunter.cuny.edu Office: 1090F, Hunter North (Entrance at 69 th bw/ / Park and Lexington Avenues)
CSc 83010 Topics in Computer Graphics 3D Photography Tuesdays 11:45-1:45 1:45 Room 3305 Ioannis Stamos istamos@hunter.cuny.edu Office: 1090F, Hunter North (Entrance at 69 th bw/ / Park and Lexington Avenues)
Depth Sensors Kinect V2 A. Fornaser
 Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Multi-View Stereo for Static and Dynamic Scenes
 Multi-View Stereo for Static and Dynamic Scenes Wolfgang Burgard Jan 6, 2010 Main references Yasutaka Furukawa and Jean Ponce, Accurate, Dense and Robust Multi-View Stereopsis, 2007 C.L. Zitnick, S.B.
Multi-View Stereo for Static and Dynamic Scenes Wolfgang Burgard Jan 6, 2010 Main references Yasutaka Furukawa and Jean Ponce, Accurate, Dense and Robust Multi-View Stereopsis, 2007 C.L. Zitnick, S.B.
Binocular stereo. Given a calibrated binocular stereo pair, fuse it to produce a depth image. Where does the depth information come from?
 Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
ENGN D Photography / Spring 2018 / SYLLABUS
 ENGN 2502 3D Photography / Spring 2018 / SYLLABUS Description of the proposed course Over the last decade digital photography has entered the mainstream with inexpensive, miniaturized cameras routinely
ENGN 2502 3D Photography / Spring 2018 / SYLLABUS Description of the proposed course Over the last decade digital photography has entered the mainstream with inexpensive, miniaturized cameras routinely
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Image Based Reconstruction II
 Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Lecture 19: Depth Cameras. Visual Computing Systems CMU , Fall 2013
 Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Surround Structured Lighting for Full Object Scanning
 Surround Structured Lighting for Full Object Scanning Douglas Lanman, Daniel Crispell, and Gabriel Taubin Brown University, Dept. of Engineering August 21, 2007 1 Outline Introduction and Related Work
Surround Structured Lighting for Full Object Scanning Douglas Lanman, Daniel Crispell, and Gabriel Taubin Brown University, Dept. of Engineering August 21, 2007 1 Outline Introduction and Related Work
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo In this lecture, we ll first discuss another framework for describing stereo systems called active stereo, and then introduce the problem of volumetric stereo,
Lecture 8 Active stereo & Volumetric stereo In this lecture, we ll first discuss another framework for describing stereo systems called active stereo, and then introduce the problem of volumetric stereo,
CS4495/6495 Introduction to Computer Vision
 CS4495/6495 Introduction to Computer Vision 9C-L1 3D perception Some slides by Kelsey Hawkins Motivation Why do animals, people & robots need vision? To detect and recognize objects/landmarks Is that a
CS4495/6495 Introduction to Computer Vision 9C-L1 3D perception Some slides by Kelsey Hawkins Motivation Why do animals, people & robots need vision? To detect and recognize objects/landmarks Is that a
3D Computer Vision. Depth Cameras. Prof. Didier Stricker. Oliver Wasenmüller
 3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
A High Speed Face Measurement System
 A High Speed Face Measurement System Kazuhide HASEGAWA, Kazuyuki HATTORI and Yukio SATO Department of Electrical and Computer Engineering, Nagoya Institute of Technology Gokiso, Showa, Nagoya, Japan, 466-8555
A High Speed Face Measurement System Kazuhide HASEGAWA, Kazuyuki HATTORI and Yukio SATO Department of Electrical and Computer Engineering, Nagoya Institute of Technology Gokiso, Showa, Nagoya, Japan, 466-8555
PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO
 Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
A Desktop 3D Scanner Exploiting Rotation and Visual Rectification of Laser Profiles
 A Desktop 3D Scanner Exploiting Rotation and Visual Rectification of Laser Profiles Carlo Colombo, Dario Comanducci, and Alberto Del Bimbo Dipartimento di Sistemi ed Informatica Via S. Marta 3, I-5139
A Desktop 3D Scanner Exploiting Rotation and Visual Rectification of Laser Profiles Carlo Colombo, Dario Comanducci, and Alberto Del Bimbo Dipartimento di Sistemi ed Informatica Via S. Marta 3, I-5139
Project Ideas. Guido Gerig CS 6643, Computer Vision Spring 2016
 Project Ideas Guido Gerig CS 6643, Computer Vision Spring 2016 Final Project 3D CV Work on your own. Select a 3D vision method (examples given in slides). Develop a project that goes from input data to
Project Ideas Guido Gerig CS 6643, Computer Vision Spring 2016 Final Project 3D CV Work on your own. Select a 3D vision method (examples given in slides). Develop a project that goes from input data to
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Automatic Reconstruction of 3D Objects Using a Mobile Monoscopic Camera
 Automatic Reconstruction of 3D Objects Using a Mobile Monoscopic Camera Wolfgang Niem, Jochen Wingbermühle Universität Hannover Institut für Theoretische Nachrichtentechnik und Informationsverarbeitung
Automatic Reconstruction of 3D Objects Using a Mobile Monoscopic Camera Wolfgang Niem, Jochen Wingbermühle Universität Hannover Institut für Theoretische Nachrichtentechnik und Informationsverarbeitung
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Mapping textures on 3D geometric model using reflectance image
 Mapping textures on 3D geometric model using reflectance image Ryo Kurazume M. D. Wheeler Katsushi Ikeuchi The University of Tokyo Cyra Technologies, Inc. The University of Tokyo fkurazume,kig@cvl.iis.u-tokyo.ac.jp
Mapping textures on 3D geometric model using reflectance image Ryo Kurazume M. D. Wheeler Katsushi Ikeuchi The University of Tokyo Cyra Technologies, Inc. The University of Tokyo fkurazume,kig@cvl.iis.u-tokyo.ac.jp
The raycloud A Vision Beyond the Point Cloud
 The raycloud A Vision Beyond the Point Cloud Christoph STRECHA, Switzerland Key words: Photogrammetry, Aerial triangulation, Multi-view stereo, 3D vectorisation, Bundle Block Adjustment SUMMARY Measuring
The raycloud A Vision Beyond the Point Cloud Christoph STRECHA, Switzerland Key words: Photogrammetry, Aerial triangulation, Multi-view stereo, 3D vectorisation, Bundle Block Adjustment SUMMARY Measuring
Stereo. Many slides adapted from Steve Seitz
 Stereo Many slides adapted from Steve Seitz Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image image 1 image 2 Dense depth map Binocular stereo Given a calibrated
Stereo Many slides adapted from Steve Seitz Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image image 1 image 2 Dense depth map Binocular stereo Given a calibrated
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Range Sensors (time of flight) (1)
 (1)") Range Sensors (time of flight) (1) Large range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic sensors, infra-red sensors
Range Sensors (time of flight) (1) Large range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic sensors, infra-red sensors
Other approaches to obtaining 3D structure
 Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Recap from Previous Lecture
 Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
10/5/09 1. d = 2. Range Sensors (time of flight) (2) Ultrasonic Sensor (time of flight, sound) (1) Ultrasonic Sensor (time of flight, sound) (2) 4.1.
 (2) Ultrasonic Sensor (time of flight, sound) (1) Ultrasonic Sensor (time of flight, sound) (2) 4.1.") Range Sensors (time of flight) (1) Range Sensors (time of flight) (2) arge range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic
Range Sensors (time of flight) (1) Range Sensors (time of flight) (2) arge range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic
What have we leaned so far?
 What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
3D scanning. 3D scanning is a family of technologies created as a means of automatic measurement of geometric properties of objects.
 Acquiring 3D shape 3D scanning 3D scanning is a family of technologies created as a means of automatic measurement of geometric properties of objects. The produced digital model is formed by geometric
Acquiring 3D shape 3D scanning 3D scanning is a family of technologies created as a means of automatic measurement of geometric properties of objects. The produced digital model is formed by geometric
3D shape from the structure of pencils of planes and geometric constraints
 3D shape from the structure of pencils of planes and geometric constraints Paper ID: 691 Abstract. Active stereo systems using structured light has been used as practical solutions for 3D measurements.
3D shape from the structure of pencils of planes and geometric constraints Paper ID: 691 Abstract. Active stereo systems using structured light has been used as practical solutions for 3D measurements.
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Design and Calibration of a Network of RGB-D Sensors for Robotic Applications over Large Workspaces
 Design and Calibration of a Network of RGB-D Sensors for Robotic Applications over Large Workspaces By: Rizwan Macknojia A thesis submitted to the Faculty of Graduate and Postdoctoral Studies In partial
Design and Calibration of a Network of RGB-D Sensors for Robotic Applications over Large Workspaces By: Rizwan Macknojia A thesis submitted to the Faculty of Graduate and Postdoctoral Studies In partial
AIT Inline Computational Imaging: Geometric calibration and image rectification
 AIT Inline Computational Imaging: Geometric calibration and image rectification B. Blaschitz, S. Štolc and S. Breuss AIT Austrian Institute of Technology GmbH Center for Vision, Automation & Control Vienna,
AIT Inline Computational Imaging: Geometric calibration and image rectification B. Blaschitz, S. Štolc and S. Breuss AIT Austrian Institute of Technology GmbH Center for Vision, Automation & Control Vienna,
CITS 4402 Computer Vision
 CITS 4402 Computer Vision Prof Ajmal Mian Lecture 12 3D Shape Analysis & Matching Overview of this lecture Revision of 3D shape acquisition techniques Representation of 3D data Applying 2D image techniques
CITS 4402 Computer Vision Prof Ajmal Mian Lecture 12 3D Shape Analysis & Matching Overview of this lecture Revision of 3D shape acquisition techniques Representation of 3D data Applying 2D image techniques
Stereo Vision A simple system. Dr. Gerhard Roth Winter 2012
 Stereo Vision A simple system Dr. Gerhard Roth Winter 2012 Stereo Stereo Ability to infer information on the 3-D structure and distance of a scene from two or more images taken from different viewpoints
Stereo Vision A simple system Dr. Gerhard Roth Winter 2012 Stereo Stereo Ability to infer information on the 3-D structure and distance of a scene from two or more images taken from different viewpoints
Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection
 Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection Svorad Štolc et al. svorad.stolc@ait.ac.at AIT Austrian Institute of Technology GmbH Center
Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection Svorad Štolc et al. svorad.stolc@ait.ac.at AIT Austrian Institute of Technology GmbH Center
Computer Vision at Cambridge: Reconstruction,Registration and Recognition
 Computer Vision at Cambridge: Reconstruction,Registration and Recognition Roberto Cipolla Research team http://www.eng.cam.ac.uk/~cipolla/people.html Cognitive Systems Engineering Cognitive Systems Engineering
Computer Vision at Cambridge: Reconstruction,Registration and Recognition Roberto Cipolla Research team http://www.eng.cam.ac.uk/~cipolla/people.html Cognitive Systems Engineering Cognitive Systems Engineering
Talk plan. 3d model. Applications: cultural heritage 5/9/ d shape reconstruction from photographs: a Multi-View Stereo approach
 Talk plan 3d shape reconstruction from photographs: a Multi-View Stereo approach Introduction Multi-View Stereo pipeline Carlos Hernández George Vogiatzis Yasutaka Furukawa Google Aston University Google
Talk plan 3d shape reconstruction from photographs: a Multi-View Stereo approach Introduction Multi-View Stereo pipeline Carlos Hernández George Vogiatzis Yasutaka Furukawa Google Aston University Google
Spacetime Stereo: A Unifying Framework for Depth from Triangulation. Abstract
 Spacetime Stereo: A Unifying Framework for Depth from Triangulation James Davis Diego Nehab Ravi Ramamoorthi Szymon Rusinkiewicz Honda Research Institute Princeton University Columbia University Princeton
Spacetime Stereo: A Unifying Framework for Depth from Triangulation James Davis Diego Nehab Ravi Ramamoorthi Szymon Rusinkiewicz Honda Research Institute Princeton University Columbia University Princeton
Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by ) Readings Szeliski, Chapter 10 (through 10.5)
 Readings Szeliski, Chapter 10 (through 10.5)") Announcements Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by email) One-page writeup (from project web page), specifying:» Your team members» Project goals. Be specific.
Announcements Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by email) One-page writeup (from project web page), specifying:» Your team members» Project goals. Be specific.
3DPIXA: options and challenges with wirebond inspection. Whitepaper
 3DPIXA: options and challenges with wirebond inspection Whitepaper Version Author(s) Date R01 Timo Eckhard, Maximilian Klammer 06.09.2017 R02 Timo Eckhard 18.10.2017 Executive Summary: Wirebond inspection
3DPIXA: options and challenges with wirebond inspection Whitepaper Version Author(s) Date R01 Timo Eckhard, Maximilian Klammer 06.09.2017 R02 Timo Eckhard 18.10.2017 Executive Summary: Wirebond inspection
ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows
 ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 29 January 2009 Figure 1: 3D Photography
ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 29 January 2009 Figure 1: 3D Photography
3D Computer Vision Introduction
 3D Computer Vision Introduction Tom Henderson CS 6320 S2014 tch@cs.utah.edu Acknowledgements: slides from Guido Gerig (Utah) & Marc Pollefeys, UNC Chapel Hill) Administration Classes: M & W, 1:25-2:45
3D Computer Vision Introduction Tom Henderson CS 6320 S2014 tch@cs.utah.edu Acknowledgements: slides from Guido Gerig (Utah) & Marc Pollefeys, UNC Chapel Hill) Administration Classes: M & W, 1:25-2:45
3D Sensing and Reconstruction Readings: Ch 12: , Ch 13: ,
 3D Sensing and Reconstruction Readings: Ch 12: 12.5-6, Ch 13: 13.1-3, 13.9.4 Perspective Geometry Camera Model Stereo Triangulation 3D Reconstruction by Space Carving 3D Shape from X means getting 3D coordinates
3D Sensing and Reconstruction Readings: Ch 12: 12.5-6, Ch 13: 13.1-3, 13.9.4 Perspective Geometry Camera Model Stereo Triangulation 3D Reconstruction by Space Carving 3D Shape from X means getting 3D coordinates
Recap: Features and filters. Recap: Grouping & fitting. Now: Multiple views 10/29/2008. Epipolar geometry & stereo vision. Why multiple views?
 Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Project 2 due today Project 3 out today. Readings Szeliski, Chapter 10 (through 10.5)
") Announcements Stereo Project 2 due today Project 3 out today Single image stereogram, by Niklas Een Readings Szeliski, Chapter 10 (through 10.5) Public Library, Stereoscopic Looking Room, Chicago, by Phillips,
Announcements Stereo Project 2 due today Project 3 out today Single image stereogram, by Niklas Een Readings Szeliski, Chapter 10 (through 10.5) Public Library, Stereoscopic Looking Room, Chicago, by Phillips,
3D Scanning Method for Fast Motion using Single Grid Pattern with Coarse-to-fine Technique
 3D Scanning Method for Fast Motion using Single Grid Pattern with Coarse-to-fine Technique Ryo Furukawa Faculty of information sciences, Hiroshima City University, Japan ryo-f@cs.hiroshima-cu.ac.jp Hiroshi
3D Scanning Method for Fast Motion using Single Grid Pattern with Coarse-to-fine Technique Ryo Furukawa Faculty of information sciences, Hiroshima City University, Japan ryo-f@cs.hiroshima-cu.ac.jp Hiroshi
Measurement of 3D Foot Shape Deformation in Motion
 Measurement of 3D Foot Shape Deformation in Motion Makoto Kimura Masaaki Mochimaru Takeo Kanade Digital Human Research Center National Institute of Advanced Industrial Science and Technology, Japan The
Measurement of 3D Foot Shape Deformation in Motion Makoto Kimura Masaaki Mochimaru Takeo Kanade Digital Human Research Center National Institute of Advanced Industrial Science and Technology, Japan The
Optical Imaging Techniques and Applications
 Optical Imaging Techniques and Applications Jason Geng, Ph.D. Vice President IEEE Intelligent Transportation Systems Society jason.geng@ieee.org Outline Structured light 3D surface imaging concept Classification
Optical Imaging Techniques and Applications Jason Geng, Ph.D. Vice President IEEE Intelligent Transportation Systems Society jason.geng@ieee.org Outline Structured light 3D surface imaging concept Classification
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
AN AUTOMATIC 3D RECONSTRUCTION METHOD BASED ON MULTI-VIEW STEREO VISION FOR THE MOGAO GROTTOES
 The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XL-4/W5, 05 Indoor-Outdoor Seamless Modelling, Mapping and avigation, May 05, Tokyo, Japan A AUTOMATIC
The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XL-4/W5, 05 Indoor-Outdoor Seamless Modelling, Mapping and avigation, May 05, Tokyo, Japan A AUTOMATIC
Volume Illumination and Segmentation
 Volume Illumination and Segmentation Computer Animation and Visualisation Lecture 13 Institute for Perception, Action & Behaviour School of Informatics Overview Volume illumination Segmentation Volume
Volume Illumination and Segmentation Computer Animation and Visualisation Lecture 13 Institute for Perception, Action & Behaviour School of Informatics Overview Volume illumination Segmentation Volume
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
AUTOMATED 4 AXIS ADAYfIVE SCANNING WITH THE DIGIBOTICS LASER DIGITIZER
 AUTOMATED 4 AXIS ADAYfIVE SCANNING WITH THE DIGIBOTICS LASER DIGITIZER INTRODUCTION The DIGIBOT 3D Laser Digitizer is a high performance 3D input device which combines laser ranging technology, personal
AUTOMATED 4 AXIS ADAYfIVE SCANNING WITH THE DIGIBOTICS LASER DIGITIZER INTRODUCTION The DIGIBOT 3D Laser Digitizer is a high performance 3D input device which combines laser ranging technology, personal
IMAGE-BASED RENDERING
 IMAGE-BASED RENDERING 1. What is Image-Based Rendering? - The synthesis of new views of a scene from pre-recorded pictures.!"$#% "'&( )*+,-/.). #0 1 ' 2"&43+5+, 2. Why? (1) We really enjoy visual magic!
IMAGE-BASED RENDERING 1. What is Image-Based Rendering? - The synthesis of new views of a scene from pre-recorded pictures.!"$#% "'&( )*+,-/.). #0 1 ' 2"&43+5+, 2. Why? (1) We really enjoy visual magic!
Photoneo's brand new PhoXi 3D Camera is the highest resolution and highest accuracy area based 3D
 Company: Photoneo s.r.o. Germany Contact: Veronika Pulisova E-mail: pulisova@photoneo.com PhoXi 3D Camera Author: Tomas Kovacovsky & Jan Zizka Description of the innovation: General description Photoneo's
Company: Photoneo s.r.o. Germany Contact: Veronika Pulisova E-mail: pulisova@photoneo.com PhoXi 3D Camera Author: Tomas Kovacovsky & Jan Zizka Description of the innovation: General description Photoneo's
Why study Computer Vision?
 Computer Vision Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance
Computer Vision Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance
Introduction to Computer Vision. Week 10, Winter 2010 Instructor: Prof. Ko Nishino
 Introduction to Computer Vision Week 10, Winter 2010 Instructor: Prof. Ko Nishino Today How do we recover geometry from 2 views? Stereo Can we recover geometry from a sequence of images Structure-from-Motion
Introduction to Computer Vision Week 10, Winter 2010 Instructor: Prof. Ko Nishino Today How do we recover geometry from 2 views? Stereo Can we recover geometry from a sequence of images Structure-from-Motion
3D Models from Range Sensors. Gianpaolo Palma
 3D Models from Range Sensors Gianpaolo Palma Who Gianpaolo Palma Researcher at Visual Computing Laboratory (ISTI-CNR) Expertise: 3D scanning, Mesh Processing, Computer Graphics E-mail: gianpaolo.palma@isti.cnr.it
3D Models from Range Sensors Gianpaolo Palma Who Gianpaolo Palma Researcher at Visual Computing Laboratory (ISTI-CNR) Expertise: 3D scanning, Mesh Processing, Computer Graphics E-mail: gianpaolo.palma@isti.cnr.it
Geometric Modeling. Bing-Yu Chen National Taiwan University The University of Tokyo
 Geometric Modeling Bing-Yu Chen National Taiwan University The University of Tokyo What are 3D Objects? 3D Object Representations What are 3D objects? The Graphics Process 3D Object Representations Raw
Geometric Modeling Bing-Yu Chen National Taiwan University The University of Tokyo What are 3D Objects? 3D Object Representations What are 3D objects? The Graphics Process 3D Object Representations Raw
Constructing a 3D Object Model from Multiple Visual Features
 Constructing a 3D Object Model from Multiple Visual Features Jiang Yu Zheng Faculty of Computer Science and Systems Engineering Kyushu Institute of Technology Iizuka, Fukuoka 820, Japan Abstract This work
Constructing a 3D Object Model from Multiple Visual Features Jiang Yu Zheng Faculty of Computer Science and Systems Engineering Kyushu Institute of Technology Iizuka, Fukuoka 820, Japan Abstract This work
A New Way to 3D Scan. Photo-based Scanning Saves Time and Money. A White Paper by Alan Walford, Eos Systems Inc.
 A New Way to 3D Scan Photo-based Scanning Saves Time and Money A White Paper by Alan Walford, Eos Systems Inc. Introduction Do you need to create dense 3D point clouds and detailed surface models of physical
A New Way to 3D Scan Photo-based Scanning Saves Time and Money A White Paper by Alan Walford, Eos Systems Inc. Introduction Do you need to create dense 3D point clouds and detailed surface models of physical
EECS 442 Computer vision. Announcements
 EECS 442 Computer vision Announcements Midterm released after class (at 5pm) You ll have 46 hours to solve it. it s take home; you can use your notes and the books no internet must work on it individually
EECS 442 Computer vision Announcements Midterm released after class (at 5pm) You ll have 46 hours to solve it. it s take home; you can use your notes and the books no internet must work on it individually