3D Scanning. Qixing Huang Feb. 9 th Slide Credit: Yasutaka Furukawa
|
|
|
- Bernadette McDaniel
- 5 years ago
- Views:
Transcription








1 3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa
2 Geometry Reconstruction Pipeline
3 This Lecture Depth Sensing ICP for Pair-wise Alignment
4 Next Lecture Global Alignment Pairwise Multiple

5 Depth Sensing Contact Mechanical (CMM, jointed arm) Inertial (gyroscope, accelerometer) Ultrasonic trackers Magnetic trackers Range acquisition Transmissive Industrial CT Ultrasound MRI Reflective Non-optical Optical Radar Sonar Slide credit: Szymon Rusinkiewicz

6 Touch Probes Jointed arms with angular encoders Return position, orientation of tip Faro Arm Faro Technologies, Inc.
7 Depth Sensing Optical methods Passive Active Shape from X: stereo motion shading texture focus defocus Active variants of passive methods Stereo w. projected texture Active depth from defocus Photometric stereo Time of flight Triangulation


, time")

8 Pulsed Time of Flight Basic idea: send out pulse of light (usually laser), time how long it takes to return d 1 ct 2
9 Pulsed Time of Flight Advantages: Large working volume (up to 100 m.) Disadvantages: Not-so-great accuracy (at best ~5 mm.) Requires getting timing to ~30 picoseconds Often used for scanning buildings, rooms, archeological sites, etc.

10 AM Modulation Time of Flight Modulate a laser at frequency m, it returns with a phase shift Note the ambiguity in the measured phase! Range ambiguity of 1 / 2 m n n ν c d m
11 AM Modulation Time of Flight Accuracy / working volume tradeoff (e.g., noise ~ 1 / 500 working volume) In practice, often used for room-sized environments (cheaper, more accurate than pulsed time of flight)
12 Triangulation
13 Triangulation: Moving the Camera and Illumination Moving independently leads to problems with focus, resolution Most scanners mount camera and light source rigidly, move them as a unit
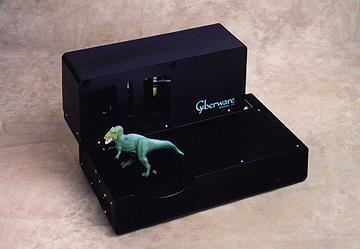

14 Triangulation: Moving the Camera and Illumination
15 Triangulation: Extending to 3D Possibility #1: add another mirror (flying spot) Possibility #2: project a stripe, not a dot Object Laser Camera
16 Pattern Design

17 Structured Light General Principle Zhang et al, 3DPVT (2002) Project a known pattern onto the scene and infer depth from the deformation of that pattern


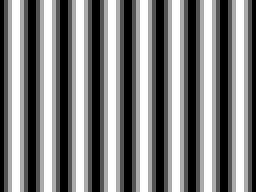
18 Time-Coded Light Patterns Assign each stripe a unique illumination code over time [Posdamer 82]
19 Time-Coded Light Patterns Assign each stripe a unique illumination code over time [Posdamer 82] Time Space
20 Binary Encoded Light Stripes Set of light planes are projected into the scene Individual light planes are indexed by an encoding scheme for the light patterns Obtained images are used to uniquely address the light plane corresponding to every image point

21 Binary Coding Example Codeword of this pixel: > Identifies the corresponding pattern stripe
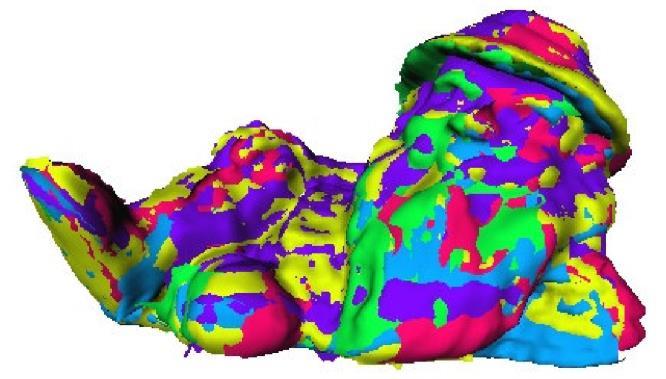
22 Accounting for Reflectance Because of surface reflectance and ambient light, distinguishing between black and white not always easy Solution: project all-white (and sometimes all-black) frame Permits multiple shades of gray

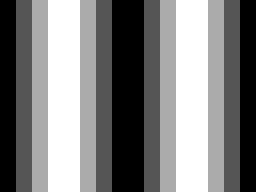
23 Multiple Shades of Gray




24 Multiple Shades of Gray
25 Temporal vs. Spatial Continuity Structured-light systems make certain assumptions about the scene: Temporal continuity assumption: Assume scene is static Assign stripes a code over time Spatial continuity assumption: Assume scene is one object Project a grid, pattern of dots, etc.

26 Grid Methods Assume exactly one continuous surface Count dots or grid lines Occlusions cause problems Some methods use dynamic programming


27 Codes Assuming Local Spatial Continuity Codeword


28 Codes Assuming Local Spatial Continuity [Zhang et al. 02] [Ozturk et al. 03]
29 Homework: How to handle moving objects?

30 Kinect Kinect combines structured light with two classic computer vision techniques: depth from focus, and depth from stereo Figure copied from Kinect for Windows SDK Quickstarts

31 The Kinect uses infrared laser light, with a speckle pattern Shpunt et al, PrimeSense patent application US 2008/
32 Depth from Stereo Uses Parallax The Kinect analyzes the shift of the speckle pattern by projecting from one location and observing from another
33 ICP for Pairwise Alignment

34 Pairwise Alignment ICP [Besel and Mckay 92]

35 ICP Formulation



36 ICP Variants Point-plane distance [Chen and Medioni 91] Stable sampling [Gelfand et al. 03] Robust norm
Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV Venus de Milo
 Vision Sensing Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV 2007 Venus de Milo The Digital Michelangelo Project, Stanford How to sense 3D very accurately? How to sense
Vision Sensing Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV 2007 Venus de Milo The Digital Michelangelo Project, Stanford How to sense 3D very accurately? How to sense
3D Photography: Active Ranging, Structured Light, ICP
 3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Photography: Stereo
 3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
L2 Data Acquisition. Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods
 Structured light Range images Shape from shading Other methods") L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
Active Stereo Vision. COMP 4900D Winter 2012 Gerhard Roth
 Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Computer Vision. 3D acquisition
 è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
Overview of Active Vision Techniques
 SIGGRAPH 99 Course on 3D Photography Overview of Active Vision Techniques Brian Curless University of Washington Overview Introduction Active vision techniques Imaging radar Triangulation Moire Active
SIGGRAPH 99 Course on 3D Photography Overview of Active Vision Techniques Brian Curless University of Washington Overview Introduction Active vision techniques Imaging radar Triangulation Moire Active
Lecture 19: Depth Cameras. Visual Computing Systems CMU , Fall 2013
 Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Perspective projection
 Sensors Ioannis Stamos Perspective projection Pinhole & the Perspective Projection (x,y) SCENE SCREEN Is there an image being formed on the screen?
Sensors Ioannis Stamos Perspective projection Pinhole & the Perspective Projection (x,y) SCENE SCREEN Is there an image being formed on the screen?
Structured Light II. Guido Gerig CS 6320, Spring (thanks: slides Prof. S. Narasimhan, CMU, Marc Pollefeys, UNC)
") Structured Light II Guido Gerig CS 6320, Spring 2013 (thanks: slides Prof. S. Narasimhan, CMU, Marc Pollefeys, UNC) http://www.cs.cmu.edu/afs/cs/academic/class/15385- s06/lectures/ppts/lec-17.ppt Variant
Structured Light II Guido Gerig CS 6320, Spring 2013 (thanks: slides Prof. S. Narasimhan, CMU, Marc Pollefeys, UNC) http://www.cs.cmu.edu/afs/cs/academic/class/15385- s06/lectures/ppts/lec-17.ppt Variant
Traditional pipeline for shape capture. Active range scanning. New pipeline for shape capture. Draw contours on model. Digitize lines with touch probe
 Traditional pipeline for shape capture Draw contours on model Active range scanning Digitize lines with touch probe Fit smooth surfaces CAD/CAM Texturing and animation 1 2 New pipeline for shape capture
Traditional pipeline for shape capture Draw contours on model Active range scanning Digitize lines with touch probe Fit smooth surfaces CAD/CAM Texturing and animation 1 2 New pipeline for shape capture
Structured light , , Computational Photography Fall 2017, Lecture 27
 Structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 27 Course announcements Homework 5 has been graded. - Mean: 129. - Median:
Structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 27 Course announcements Homework 5 has been graded. - Mean: 129. - Median:
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
CS4495/6495 Introduction to Computer Vision
 CS4495/6495 Introduction to Computer Vision 9C-L1 3D perception Some slides by Kelsey Hawkins Motivation Why do animals, people & robots need vision? To detect and recognize objects/landmarks Is that a
CS4495/6495 Introduction to Computer Vision 9C-L1 3D perception Some slides by Kelsey Hawkins Motivation Why do animals, people & robots need vision? To detect and recognize objects/landmarks Is that a
Structured Light. Tobias Nöll Thanks to Marc Pollefeys, David Nister and David Lowe
 Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
Stereo and structured light
 Stereo and structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 20 Course announcements Homework 5 is still ongoing. - Make sure
Stereo and structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 20 Course announcements Homework 5 is still ongoing. - Make sure
Image Based Reconstruction II
 Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
The main problem of photogrammetry
 Structured Light Structured Light The main problem of photogrammetry to recover shape from multiple views of a scene, we need to find correspondences between the images the matching/correspondence problem
Structured Light Structured Light The main problem of photogrammetry to recover shape from multiple views of a scene, we need to find correspondences between the images the matching/correspondence problem
Other Reconstruction Techniques
 Other Reconstruction Techniques Ruigang Yang CS 684 CS 684 Spring 2004 1 Taxonomy of Range Sensing From Brain Curless, SIGGRAPH 00 Lecture notes CS 684 Spring 2004 2 Taxonomy of Range Scanning (cont.)
Other Reconstruction Techniques Ruigang Yang CS 684 CS 684 Spring 2004 1 Taxonomy of Range Sensing From Brain Curless, SIGGRAPH 00 Lecture notes CS 684 Spring 2004 2 Taxonomy of Range Scanning (cont.)
3D Computer Vision. Structured Light I. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light I Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light I Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Binocular stereo. Given a calibrated binocular stereo pair, fuse it to produce a depth image. Where does the depth information come from?
 Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
3D Object Representations. COS 526, Fall 2016 Princeton University
 3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
3D Modeling of Objects Using Laser Scanning
 1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
3D Computer Vision. Depth Cameras. Prof. Didier Stricker. Oliver Wasenmüller
 3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D scanning. 3D scanning is a family of technologies created as a means of automatic measurement of geometric properties of objects.
 Acquiring 3D shape 3D scanning 3D scanning is a family of technologies created as a means of automatic measurement of geometric properties of objects. The produced digital model is formed by geometric
Acquiring 3D shape 3D scanning 3D scanning is a family of technologies created as a means of automatic measurement of geometric properties of objects. The produced digital model is formed by geometric
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Outline. ETN-FPI Training School on Plenoptic Sensing
 Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Depth. Common Classification Tasks. Example: AlexNet. Another Example: Inception. Another Example: Inception. Depth
 Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Chaplin, Modern Times, 1936
 Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Optical Active 3D Scanning. Gianpaolo Palma
 Optical Active 3D Scanning Gianpaolo Palma 3D Scanning Taxonomy SHAPE ACQUISTION CONTACT NO-CONTACT NO DESTRUCTIVE DESTRUCTIVE X-RAY MAGNETIC OPTICAL ACOUSTIC CMM ROBOTIC GANTRY SLICING ACTIVE PASSIVE
Optical Active 3D Scanning Gianpaolo Palma 3D Scanning Taxonomy SHAPE ACQUISTION CONTACT NO-CONTACT NO DESTRUCTIVE DESTRUCTIVE X-RAY MAGNETIC OPTICAL ACOUSTIC CMM ROBOTIC GANTRY SLICING ACTIVE PASSIVE
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Depth Sensors Kinect V2 A. Fornaser
 Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
3D photography. Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/5/15
 3D photography Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/5/15 with slides by Szymon Rusinkiewicz, Richard Szeliski, Steve Seitz and Brian Curless Announcements Project #3 is due on 5/20.
3D photography Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/5/15 with slides by Szymon Rusinkiewicz, Richard Szeliski, Steve Seitz and Brian Curless Announcements Project #3 is due on 5/20.
Surround Structured Lighting for Full Object Scanning
 Surround Structured Lighting for Full Object Scanning Douglas Lanman, Daniel Crispell, and Gabriel Taubin Brown University, Dept. of Engineering August 21, 2007 1 Outline Introduction and Related Work
Surround Structured Lighting for Full Object Scanning Douglas Lanman, Daniel Crispell, and Gabriel Taubin Brown University, Dept. of Engineering August 21, 2007 1 Outline Introduction and Related Work
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
What have we leaned so far?
 What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
Stereo. Many slides adapted from Steve Seitz
 Stereo Many slides adapted from Steve Seitz Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image image 1 image 2 Dense depth map Binocular stereo Given a calibrated
Stereo Many slides adapted from Steve Seitz Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image image 1 image 2 Dense depth map Binocular stereo Given a calibrated
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Multi-view Stereo. Ivo Boyadzhiev CS7670: September 13, 2011
 Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond
 High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond New generation of interfaces Instead of interacting through indirect input devices (mice and keyboard), the user is interacting
High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond New generation of interfaces Instead of interacting through indirect input devices (mice and keyboard), the user is interacting
3D Perception. CS 4495 Computer Vision K. Hawkins. CS 4495 Computer Vision. 3D Perception. Kelsey Hawkins Robotics
 CS 4495 Computer Vision Kelsey Hawkins Robotics Motivation What do animals, people, and robots want to do with vision? Detect and recognize objects/landmarks Find location of objects with respect to themselves
CS 4495 Computer Vision Kelsey Hawkins Robotics Motivation What do animals, people, and robots want to do with vision? Detect and recognize objects/landmarks Find location of objects with respect to themselves
ROBOT SENSORS. 1. Proprioceptors
 ROBOT SENSORS Since the action capability is physically interacting with the environment, two types of sensors have to be used in any robotic system: - proprioceptors for the measurement of the robot s
ROBOT SENSORS Since the action capability is physically interacting with the environment, two types of sensors have to be used in any robotic system: - proprioceptors for the measurement of the robot s
EECS 442 Computer vision. Stereo systems. Stereo vision Rectification Correspondence problem Active stereo vision systems
 EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
Stereo vision. Many slides adapted from Steve Seitz
 Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
3D object recognition used by team robotto
 3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo In this lecture, we ll first discuss another framework for describing stereo systems called active stereo, and then introduce the problem of volumetric stereo,
Lecture 8 Active stereo & Volumetric stereo In this lecture, we ll first discuss another framework for describing stereo systems called active stereo, and then introduce the problem of volumetric stereo,
Sensing Deforming and Moving Objects with Commercial Off the Shelf Hardware
 Sensing Deforming and Moving Objects with Commercial Off the Shelf Hardware This work supported by: Philip Fong Florian Buron Stanford University Motivational Applications Human tissue modeling for surgical
Sensing Deforming and Moving Objects with Commercial Off the Shelf Hardware This work supported by: Philip Fong Florian Buron Stanford University Motivational Applications Human tissue modeling for surgical
Ch 22 Inspection Technologies
 Ch 22 Inspection Technologies Sections: 1. Inspection Metrology 2. Contact vs. Noncontact Inspection Techniques 3. Conventional Measuring and Gaging Techniques 4. Coordinate Measuring Machines 5. Surface
Ch 22 Inspection Technologies Sections: 1. Inspection Metrology 2. Contact vs. Noncontact Inspection Techniques 3. Conventional Measuring and Gaging Techniques 4. Coordinate Measuring Machines 5. Surface
Image-based modeling (IBM) and image-based rendering (IBR)
 and image-based rendering (IBR)") Image-based modeling (IBM) and image-based rendering (IBR) CS 248 - Introduction to Computer Graphics Autumn quarter, 2005 Slides for December 8 lecture The graphics pipeline modeling animation rendering
Image-based modeling (IBM) and image-based rendering (IBR) CS 248 - Introduction to Computer Graphics Autumn quarter, 2005 Slides for December 8 lecture The graphics pipeline modeling animation rendering
Visual Perception Sensors
 G. Glaser Visual Perception Sensors 1 / 27 MIN Faculty Department of Informatics Visual Perception Sensors Depth Determination Gerrit Glaser University of Hamburg Faculty of Mathematics, Informatics and
G. Glaser Visual Perception Sensors 1 / 27 MIN Faculty Department of Informatics Visual Perception Sensors Depth Determination Gerrit Glaser University of Hamburg Faculty of Mathematics, Informatics and
Range Sensors (time of flight) (1)
 (1)") Range Sensors (time of flight) (1) Large range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic sensors, infra-red sensors
Range Sensors (time of flight) (1) Large range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic sensors, infra-red sensors
3D Scanning. Lecture courtesy of Szymon Rusinkiewicz Princeton University
 3D Scanning Lecture courtesy of Szymon Rusinkiewicz Princeton University Computer Graphics Pipeline 3D Scanning Shape Motion Rendering Lighting and Reflectance Human time = expensive Sensors = cheap Computer
3D Scanning Lecture courtesy of Szymon Rusinkiewicz Princeton University Computer Graphics Pipeline 3D Scanning Shape Motion Rendering Lighting and Reflectance Human time = expensive Sensors = cheap Computer
There are many cues in monocular vision which suggests that vision in stereo starts very early from two similar 2D images. Lets see a few...
 STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
Computational Optical Imaging - Optique Numerique. -- Active Light 3D--
 Computational Optical Imaging - Optique Numerique -- Active Light 3D-- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Overview 3D scanning techniques Laser triangulation Structured light Photometric
Computational Optical Imaging - Optique Numerique -- Active Light 3D-- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Overview 3D scanning techniques Laser triangulation Structured light Photometric
10/5/09 1. d = 2. Range Sensors (time of flight) (2) Ultrasonic Sensor (time of flight, sound) (1) Ultrasonic Sensor (time of flight, sound) (2) 4.1.
 (2) Ultrasonic Sensor (time of flight, sound) (1) Ultrasonic Sensor (time of flight, sound) (2) 4.1.") Range Sensors (time of flight) (1) Range Sensors (time of flight) (2) arge range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic
Range Sensors (time of flight) (1) Range Sensors (time of flight) (2) arge range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Epipolar geometry contd.
 Epipolar geometry contd. Estimating F 8-point algorithm The fundamental matrix F is defined by x' T Fx = 0 for any pair of matches x and x in two images. Let x=(u,v,1) T and x =(u,v,1) T, each match gives
Epipolar geometry contd. Estimating F 8-point algorithm The fundamental matrix F is defined by x' T Fx = 0 for any pair of matches x and x in two images. Let x=(u,v,1) T and x =(u,v,1) T, each match gives
Advanced Digital Photography and Geometry Capture. Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015
 Advanced Digital Photography and Geometry Capture Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015 Eye of a Fly AWARE-2 Duke University http://www.nanowerk.com/spotlight/spotid=3744.php
Advanced Digital Photography and Geometry Capture Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015 Eye of a Fly AWARE-2 Duke University http://www.nanowerk.com/spotlight/spotid=3744.php
Surface Registration. Gianpaolo Palma
 Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
3D Models from Range Sensors. Gianpaolo Palma
 3D Models from Range Sensors Gianpaolo Palma Who Gianpaolo Palma Researcher at Visual Computing Laboratory (ISTI-CNR) Expertise: 3D scanning, Mesh Processing, Computer Graphics E-mail: gianpaolo.palma@isti.cnr.it
3D Models from Range Sensors Gianpaolo Palma Who Gianpaolo Palma Researcher at Visual Computing Laboratory (ISTI-CNR) Expertise: 3D scanning, Mesh Processing, Computer Graphics E-mail: gianpaolo.palma@isti.cnr.it
Sensor technology for mobile robots
 Laser application, vision application, sonar application and sensor fusion (6wasserf@informatik.uni-hamburg.de) Outline Introduction Mobile robots perception Definitions Sensor classification Sensor Performance
Laser application, vision application, sonar application and sensor fusion (6wasserf@informatik.uni-hamburg.de) Outline Introduction Mobile robots perception Definitions Sensor classification Sensor Performance
CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018
 Qixing Huang August 29 th 2018") CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018 3D Vision Understanding geometric relations between images and the 3D world between images Obtaining 3D information
CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018 3D Vision Understanding geometric relations between images and the 3D world between images Obtaining 3D information
MotionCam-3D. The highest resolution and highest accuracy area based 3D camera in the world. Jan Zizka, CEO AWARD 2018
 MotionCam-3D AWARD 2018 The highest resolution and highest accuracy area based 3D camera in the world Jan Zizka, CEO 3D Scanning Scanning of static scenes 3D Scanners Scanning in motion 3D Cameras Ensenso
MotionCam-3D AWARD 2018 The highest resolution and highest accuracy area based 3D camera in the world Jan Zizka, CEO 3D Scanning Scanning of static scenes 3D Scanners Scanning in motion 3D Cameras Ensenso
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Mixed-Reality for Intuitive Photo-Realistic 3D-Model Generation
 Mixed-Reality for Intuitive Photo-Realistic 3D-Model Generation Wolfgang Sepp, Tim Bodenmueller, Michael Suppa, and Gerd Hirzinger DLR, Institut für Robotik und Mechatronik @ GI-Workshop VR/AR 2009 Folie
Mixed-Reality for Intuitive Photo-Realistic 3D-Model Generation Wolfgang Sepp, Tim Bodenmueller, Michael Suppa, and Gerd Hirzinger DLR, Institut für Robotik und Mechatronik @ GI-Workshop VR/AR 2009 Folie
A High Speed Face Measurement System
 A High Speed Face Measurement System Kazuhide HASEGAWA, Kazuyuki HATTORI and Yukio SATO Department of Electrical and Computer Engineering, Nagoya Institute of Technology Gokiso, Showa, Nagoya, Japan, 466-8555
A High Speed Face Measurement System Kazuhide HASEGAWA, Kazuyuki HATTORI and Yukio SATO Department of Electrical and Computer Engineering, Nagoya Institute of Technology Gokiso, Showa, Nagoya, Japan, 466-8555
Advanced Digital Photography and Geometry Capture. Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015
 Advanced Digital Photography and Geometry Capture Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015 Eye of a Fly AWARE-2 Duke University http://www.nanowerk.com/spotlight/spotid=3744.php
Advanced Digital Photography and Geometry Capture Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015 Eye of a Fly AWARE-2 Duke University http://www.nanowerk.com/spotlight/spotid=3744.php
5.2 Surface Registration
 Spring 2018 CSCI 621: Digital Geometry Processing 5.2 Surface Registration Hao Li http://cs621.hao-li.com 1 Acknowledgement Images and Slides are courtesy of Prof. Szymon Rusinkiewicz, Princeton University
Spring 2018 CSCI 621: Digital Geometry Processing 5.2 Surface Registration Hao Li http://cs621.hao-li.com 1 Acknowledgement Images and Slides are courtesy of Prof. Szymon Rusinkiewicz, Princeton University
Other approaches to obtaining 3D structure
 Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
A 3-D Scanner Capturing Range and Color for the Robotics Applications
 J.Haverinen & J.Röning, A 3-D Scanner Capturing Range and Color for the Robotics Applications, 24th Workshop of the AAPR - Applications of 3D-Imaging and Graph-based Modeling, May 25-26, Villach, Carinthia,
J.Haverinen & J.Röning, A 3-D Scanner Capturing Range and Color for the Robotics Applications, 24th Workshop of the AAPR - Applications of 3D-Imaging and Graph-based Modeling, May 25-26, Villach, Carinthia,
Optical Imaging Techniques and Applications
 Optical Imaging Techniques and Applications Jason Geng, Ph.D. Vice President IEEE Intelligent Transportation Systems Society jason.geng@ieee.org Outline Structured light 3D surface imaging concept Classification
Optical Imaging Techniques and Applications Jason Geng, Ph.D. Vice President IEEE Intelligent Transportation Systems Society jason.geng@ieee.org Outline Structured light 3D surface imaging concept Classification
An Evaluation of Volumetric Interest Points
 An Evaluation of Volumetric Interest Points Tsz-Ho YU Oliver WOODFORD Roberto CIPOLLA Machine Intelligence Lab Department of Engineering, University of Cambridge About this project We conducted the first
An Evaluation of Volumetric Interest Points Tsz-Ho YU Oliver WOODFORD Roberto CIPOLLA Machine Intelligence Lab Department of Engineering, University of Cambridge About this project We conducted the first
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Computational Imaging for Self-Driving Vehicles
 CVPR 2018 Computational Imaging for Self-Driving Vehicles Jan Kautz--------Ramesh Raskar--------Achuta Kadambi--------Guy Satat Computational Imaging for Self-Driving Vehicles Jan Kautz--------Ramesh Raskar--------Achuta
CVPR 2018 Computational Imaging for Self-Driving Vehicles Jan Kautz--------Ramesh Raskar--------Achuta Kadambi--------Guy Satat Computational Imaging for Self-Driving Vehicles Jan Kautz--------Ramesh Raskar--------Achuta
GABRIELE GUIDI, PHD POLITECNICO DI MILANO, ITALY VISITING SCHOLAR AT INDIANA UNIVERSITY NOV OCT D IMAGE FUSION
 GABRIELE GUIDI, PHD POLITECNICO DI MILANO, ITALY VISITING SCHOLAR AT INDIANA UNIVERSITY NOV 2017 - OCT 2018 3D IMAGE FUSION 3D IMAGE FUSION WHAT A 3D IMAGE IS? A cloud of 3D points collected from a 3D
GABRIELE GUIDI, PHD POLITECNICO DI MILANO, ITALY VISITING SCHOLAR AT INDIANA UNIVERSITY NOV 2017 - OCT 2018 3D IMAGE FUSION 3D IMAGE FUSION WHAT A 3D IMAGE IS? A cloud of 3D points collected from a 3D
Stereo Vision A simple system. Dr. Gerhard Roth Winter 2012
 Stereo Vision A simple system Dr. Gerhard Roth Winter 2012 Stereo Stereo Ability to infer information on the 3-D structure and distance of a scene from two or more images taken from different viewpoints
Stereo Vision A simple system Dr. Gerhard Roth Winter 2012 Stereo Stereo Ability to infer information on the 3-D structure and distance of a scene from two or more images taken from different viewpoints
Lecture 9 & 10: Stereo Vision
 Lecture 9 & 10: Stereo Vision Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? IntroducEon to stereo vision Epipolar geometry: a gentle intro Parallel images Image receficaeon Solving
Lecture 9 & 10: Stereo Vision Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? IntroducEon to stereo vision Epipolar geometry: a gentle intro Parallel images Image receficaeon Solving
Computer and Machine Vision
 Computer and Machine Vision Lecture Week 12 Part-2 Additional 3D Scene Considerations March 29, 2014 Sam Siewert Outline of Week 12 Computer Vision APIs and Languages Alternatives to C++ and OpenCV API
Computer and Machine Vision Lecture Week 12 Part-2 Additional 3D Scene Considerations March 29, 2014 Sam Siewert Outline of Week 12 Computer Vision APIs and Languages Alternatives to C++ and OpenCV API
Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection
 Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection Svorad Štolc et al. svorad.stolc@ait.ac.at AIT Austrian Institute of Technology GmbH Center
Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection Svorad Štolc et al. svorad.stolc@ait.ac.at AIT Austrian Institute of Technology GmbH Center
Depth Camera for Mobile Devices
 Depth Camera for Mobile Devices Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Stereo Cameras Structured Light Cameras Time of Flight (ToF) Camera Inferring 3D Points Given we have
Depth Camera for Mobile Devices Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Stereo Cameras Structured Light Cameras Time of Flight (ToF) Camera Inferring 3D Points Given we have
Outline Sensors. EE Sensors. H.I. Bozma. Electric Electronic Engineering Bogazici University. December 13, 2017
 Electric Electronic Engineering Bogazici University December 13, 2017 Absolute position measurement Outline Motion Odometry Inertial systems Environmental Tactile Proximity Sensing Ground-Based RF Beacons
Electric Electronic Engineering Bogazici University December 13, 2017 Absolute position measurement Outline Motion Odometry Inertial systems Environmental Tactile Proximity Sensing Ground-Based RF Beacons
Fundamental matrix. Let p be a point in left image, p in right image. Epipolar relation. Epipolar mapping described by a 3x3 matrix F
 Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix F Fundamental
Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix F Fundamental
Photoneo's brand new PhoXi 3D Camera is the highest resolution and highest accuracy area based 3D
 Company: Photoneo s.r.o. Germany Contact: Veronika Pulisova E-mail: pulisova@photoneo.com PhoXi 3D Camera Author: Tomas Kovacovsky & Jan Zizka Description of the innovation: General description Photoneo's
Company: Photoneo s.r.o. Germany Contact: Veronika Pulisova E-mail: pulisova@photoneo.com PhoXi 3D Camera Author: Tomas Kovacovsky & Jan Zizka Description of the innovation: General description Photoneo's
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
A Full-Range of 3D Body Scanning Solutions
 Abstract A Full-Range of 3D Body Scanning Solutions Jean-Loup RENNESSON TELMAT Industrie SA, Soultz, France TELMAT extends its range of 3D body scanning solutions named SYMCAD to fulfill a wide scope of
Abstract A Full-Range of 3D Body Scanning Solutions Jean-Loup RENNESSON TELMAT Industrie SA, Soultz, France TELMAT extends its range of 3D body scanning solutions named SYMCAD to fulfill a wide scope of
ENGN 2911 I: 3D Photography and Geometry Processing Assignment 2: Structured Light for 3D Scanning
 ENGN 2911 I: 3D Photography and Geometry Processing Assignment 2: Structured Light for 3D Scanning Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 26 February 2009 Figure 1: Structured
ENGN 2911 I: 3D Photography and Geometry Processing Assignment 2: Structured Light for 3D Scanning Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 26 February 2009 Figure 1: Structured
Complex Sensors: Cameras, Visual Sensing. The Robotics Primer (Ch. 9) ECE 497: Introduction to Mobile Robotics -Visual Sensors
 ECE 497: Introduction to Mobile Robotics -Visual Sensors") Complex Sensors: Cameras, Visual Sensing The Robotics Primer (Ch. 9) Bring your laptop and robot everyday DO NOT unplug the network cables from the desktop computers or the walls Tuesday s Quiz is on Visual
Complex Sensors: Cameras, Visual Sensing The Robotics Primer (Ch. 9) Bring your laptop and robot everyday DO NOT unplug the network cables from the desktop computers or the walls Tuesday s Quiz is on Visual
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Registration of Dynamic Range Images
 Registration of Dynamic Range Images Tan-Chi Ho 1,2 Jung-Hong Chuang 1 Wen-Wei Lin 2 Song-Sun Lin 2 1 Department of Computer Science National Chiao-Tung University 2 Department of Applied Mathematics National
Registration of Dynamic Range Images Tan-Chi Ho 1,2 Jung-Hong Chuang 1 Wen-Wei Lin 2 Song-Sun Lin 2 1 Department of Computer Science National Chiao-Tung University 2 Department of Applied Mathematics National
Finally: Motion and tracking. Motion 4/20/2011. CS 376 Lecture 24 Motion 1. Video. Uses of motion. Motion parallax. Motion field
 Finally: Motion and tracking Tracking objects, video analysis, low level motion Motion Wed, April 20 Kristen Grauman UT-Austin Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys, and S. Lazebnik
Finally: Motion and tracking Tracking objects, video analysis, low level motion Motion Wed, April 20 Kristen Grauman UT-Austin Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys, and S. Lazebnik
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
EE565:Mobile Robotics Lecture 3
 EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
3D shape from the structure of pencils of planes and geometric constraints
 3D shape from the structure of pencils of planes and geometric constraints Paper ID: 691 Abstract. Active stereo systems using structured light has been used as practical solutions for 3D measurements.
3D shape from the structure of pencils of planes and geometric constraints Paper ID: 691 Abstract. Active stereo systems using structured light has been used as practical solutions for 3D measurements.