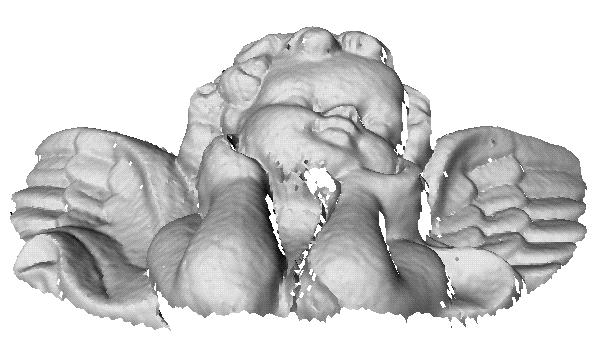
Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV Venus de Milo
|
|
|
- Derek McCormick
- 6 years ago
- Views:
Transcription
1 Vision Sensing


2 Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV 2007 Venus de Milo

3 The Digital Michelangelo Project, Stanford
4 How to sense 3D very accurately?







5 How to sense 3D very accurately? contact mechanical (CMM, jointed arm) range acquisition transmissive industrial CT MRI radar reflective non-optical optical ultrasound sonar





6 optical methods passive active shape from X: stereo motion shading texture focus defocus active variants of passive methods Stereo w. projected texture Active depth from defocus Photometric stereo time of flight triangulation
7 Triangulation Light Plane Object Laser Image Point Camera Depth from ray-plane triangulation: Intersect camera ray with light plane

8 Example: Laser scanner + very accurate < 0.01 mm more than 10sec per scan Cyberware face and head scanner

9 Example: Laser scanner Digital Michelangelo Project
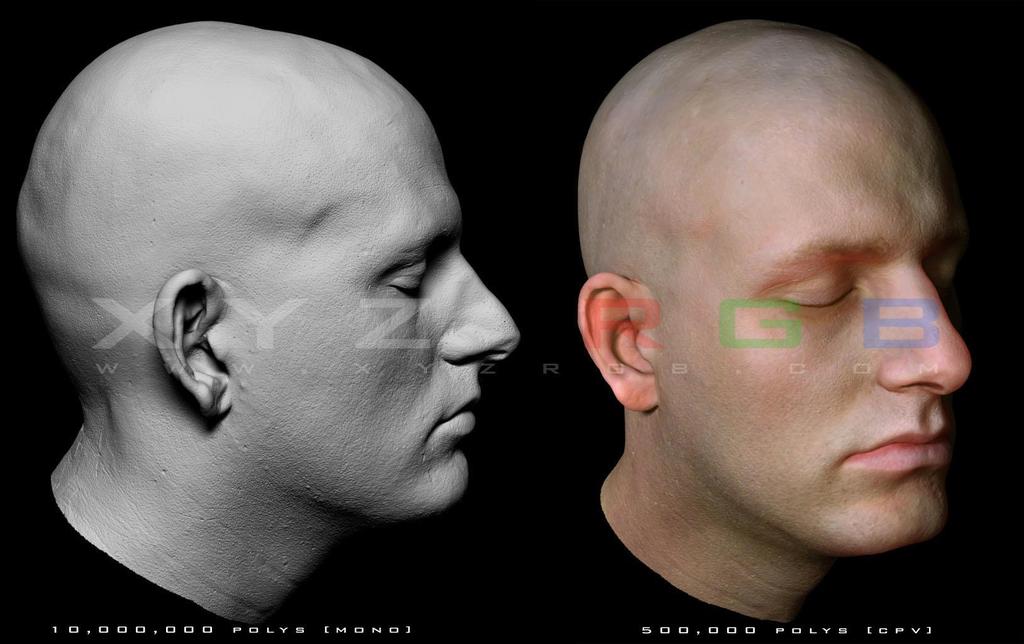
10 XYZRGB

11 Shadow scanning Desk Lamp Stick or pencil Camera Desk
12 Basic idea Calibration issues: where s the camera wrt. ground plane? where s the shadow plane? depends on light source position, shadow edge

13 Two Plane Version Advantages don t need to pre-calibrate the light source shadow plane determined from two shadow edges

14 Estimating shadow lines

15 Shadow scanning in action



16 Results accuracy: 0.1mm over 10cm ~ 0.1% error






17 Textured objects


18 Scanning with the sun accuracy: 1mm over 50cm ~ 0.5% error



19 Scanning with the sun accuracy: 1cm over 2m ~ 0.5% error
20 Faster Acquisition? Project multiple stripes simultaneously Correspondence problem: which stripe is which? Common types of patterns: Binary coded light striping Gray/color coded light striping
21 Binary Coding Faster: 2 n 1stripes in n images. Projected over time Example: 3 binary-encoded patterns which allows the measuring surface to be divided in 8 sub-regions Pattern 3 Pattern 2 Pattern 1
22 Binary Coding Assign each stripe a unique illumination code over time [Posdamer 82] Time Space




23 Binary Coding Example: 7 binary patterns proposed by Posdamer & Altschuler Projected over time Pattern 3 Pattern 2 Codeword of this píxel: identifies the corresponding pattern stripe Pattern 1




24 More complex patterns Works despite complex appearances Works in real-time and on dynamic scenes Need very few images (one or two). But needs a more complex correspondence algorithm Zhang et a



25 Continuum of Triangulation Methods Multi-stripe Multi-frame Single-stripe Single-frame Slow, robust Fast, fragile

26 Time-of-flight + No baseline, no parallax shadows + Mechanical alignment is not as critical Low depth accuracy Single viewpoint capture Miyagawa, R., Kanade, T., CCD-Based Range Finding Sensor, IEEE Transactions on Electron Devices, 1997 Working Volume: 1500mm - Accuracy: 7% Spatial Resolution: 1x32- Speed:??



27 Comercial products Canesta Accuracy 1-2cm Not accurate enough for face modeling, but good enough for layer extraction.

28 Depth from Defocus
29 Depth from Defocus




30 Depth from Defocus + Hi resolution and accuracy, real-time Customized hardware Single view capture? Nayar, S.K., Watanabe, M., Noguchi, M., Real-Time Focus Range Sensor, ICCV 1995 Working Volume: 300mm - Accuracy: 0.2% Spatial Resolution: 512x480 - Speed: 30Hz




31 Capturing and Modeling Appearance





32 Computer Vision Appearance Underwater Imaging Computer Graphics Medical Imaging Satellite Imaging


33 Capture Face Appearance Debevec, Siggraph 2002
34 Image-Based Rendering / Recognition Schechner et. al. Multiplexed Illumi + +

35 Paul Debevec s Light Stage 3




36 Light Stage Data Original Resolution: Lighting through image recombination: Haeberli 92, Nimeroff 94, Wong 97


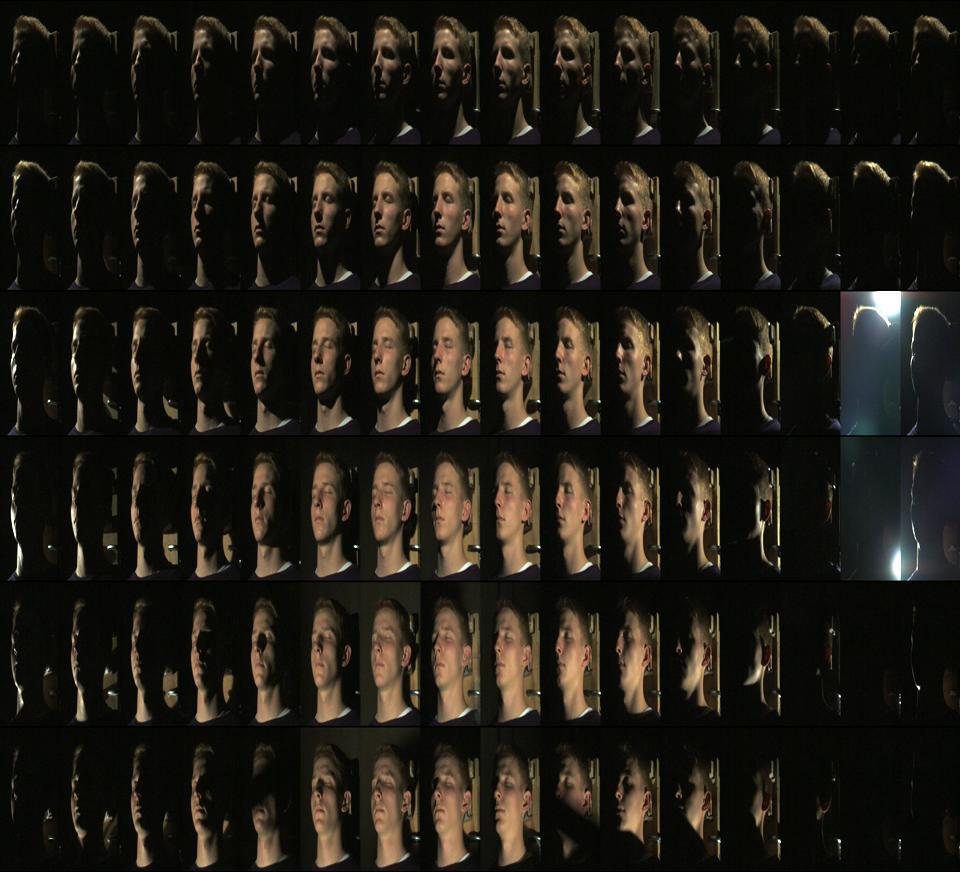
37 Shape Recovery BRDF Georghiades, Belhumeur & Kriegman Yale Face Database B Material Recognition Human Vision Rendering Object / Face Recognition
L2 Data Acquisition. Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods
 Structured light Range images Shape from shading Other methods") L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
3D Scanning. Qixing Huang Feb. 9 th Slide Credit: Yasutaka Furukawa
 3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
Structured light , , Computational Photography Fall 2017, Lecture 27
 Structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 27 Course announcements Homework 5 has been graded. - Mean: 129. - Median:
Structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 27 Course announcements Homework 5 has been graded. - Mean: 129. - Median:
Computer Vision. 3D acquisition
 è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
Stereo and structured light
 Stereo and structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 20 Course announcements Homework 5 is still ongoing. - Make sure
Stereo and structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 20 Course announcements Homework 5 is still ongoing. - Make sure
Overview of Active Vision Techniques
 SIGGRAPH 99 Course on 3D Photography Overview of Active Vision Techniques Brian Curless University of Washington Overview Introduction Active vision techniques Imaging radar Triangulation Moire Active
SIGGRAPH 99 Course on 3D Photography Overview of Active Vision Techniques Brian Curless University of Washington Overview Introduction Active vision techniques Imaging radar Triangulation Moire Active
Other Reconstruction Techniques
 Other Reconstruction Techniques Ruigang Yang CS 684 CS 684 Spring 2004 1 Taxonomy of Range Sensing From Brain Curless, SIGGRAPH 00 Lecture notes CS 684 Spring 2004 2 Taxonomy of Range Scanning (cont.)
Other Reconstruction Techniques Ruigang Yang CS 684 CS 684 Spring 2004 1 Taxonomy of Range Sensing From Brain Curless, SIGGRAPH 00 Lecture notes CS 684 Spring 2004 2 Taxonomy of Range Scanning (cont.)
Traditional pipeline for shape capture. Active range scanning. New pipeline for shape capture. Draw contours on model. Digitize lines with touch probe
 Traditional pipeline for shape capture Draw contours on model Active range scanning Digitize lines with touch probe Fit smooth surfaces CAD/CAM Texturing and animation 1 2 New pipeline for shape capture
Traditional pipeline for shape capture Draw contours on model Active range scanning Digitize lines with touch probe Fit smooth surfaces CAD/CAM Texturing and animation 1 2 New pipeline for shape capture
3D Photography: Stereo
 3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Perspective projection
 Sensors Ioannis Stamos Perspective projection Pinhole & the Perspective Projection (x,y) SCENE SCREEN Is there an image being formed on the screen?
Sensors Ioannis Stamos Perspective projection Pinhole & the Perspective Projection (x,y) SCENE SCREEN Is there an image being formed on the screen?
3D photography. Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/5/15
 3D photography Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/5/15 with slides by Szymon Rusinkiewicz, Richard Szeliski, Steve Seitz and Brian Curless Announcements Project #3 is due on 5/20.
3D photography Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/5/15 with slides by Szymon Rusinkiewicz, Richard Szeliski, Steve Seitz and Brian Curless Announcements Project #3 is due on 5/20.
Depth. Common Classification Tasks. Example: AlexNet. Another Example: Inception. Another Example: Inception. Depth
 Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
3D Object Representations. COS 526, Fall 2016 Princeton University
 3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
3D Photography: Active Ranging, Structured Light, ICP
 3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
Structured Light. Tobias Nöll Thanks to Marc Pollefeys, David Nister and David Lowe
 Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
Stereo vision. Many slides adapted from Steve Seitz
 Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
3D Computer Vision. Structured Light I. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light I Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light I Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Prof. Trevor Darrell Lecture 18: Multiview and Photometric Stereo
 C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 18: Multiview and Photometric Stereo Today Multiview stereo revisited Shape from large image collections Voxel Coloring Digital
C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 18: Multiview and Photometric Stereo Today Multiview stereo revisited Shape from large image collections Voxel Coloring Digital
Computational Optical Imaging - Optique Numerique. -- Active Light 3D--
 Computational Optical Imaging - Optique Numerique -- Active Light 3D-- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Overview 3D scanning techniques Laser triangulation Structured light Photometric
Computational Optical Imaging - Optique Numerique -- Active Light 3D-- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Overview 3D scanning techniques Laser triangulation Structured light Photometric
Structured Light II. Guido Gerig CS 6320, Spring (thanks: slides Prof. S. Narasimhan, CMU, Marc Pollefeys, UNC)
") Structured Light II Guido Gerig CS 6320, Spring 2013 (thanks: slides Prof. S. Narasimhan, CMU, Marc Pollefeys, UNC) http://www.cs.cmu.edu/afs/cs/academic/class/15385- s06/lectures/ppts/lec-17.ppt Variant
Structured Light II Guido Gerig CS 6320, Spring 2013 (thanks: slides Prof. S. Narasimhan, CMU, Marc Pollefeys, UNC) http://www.cs.cmu.edu/afs/cs/academic/class/15385- s06/lectures/ppts/lec-17.ppt Variant
Active Stereo Vision. COMP 4900D Winter 2012 Gerhard Roth
 Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
Sensing Deforming and Moving Objects with Commercial Off the Shelf Hardware
 Sensing Deforming and Moving Objects with Commercial Off the Shelf Hardware This work supported by: Philip Fong Florian Buron Stanford University Motivational Applications Human tissue modeling for surgical
Sensing Deforming and Moving Objects with Commercial Off the Shelf Hardware This work supported by: Philip Fong Florian Buron Stanford University Motivational Applications Human tissue modeling for surgical
Image-based modeling (IBM) and image-based rendering (IBR)
 and image-based rendering (IBR)") Image-based modeling (IBM) and image-based rendering (IBR) CS 248 - Introduction to Computer Graphics Autumn quarter, 2005 Slides for December 8 lecture The graphics pipeline modeling animation rendering
Image-based modeling (IBM) and image-based rendering (IBR) CS 248 - Introduction to Computer Graphics Autumn quarter, 2005 Slides for December 8 lecture The graphics pipeline modeling animation rendering
EECS 442 Computer vision. Stereo systems. Stereo vision Rectification Correspondence problem Active stereo vision systems
 EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
Mixed-Reality for Intuitive Photo-Realistic 3D-Model Generation
 Mixed-Reality for Intuitive Photo-Realistic 3D-Model Generation Wolfgang Sepp, Tim Bodenmueller, Michael Suppa, and Gerd Hirzinger DLR, Institut für Robotik und Mechatronik @ GI-Workshop VR/AR 2009 Folie
Mixed-Reality for Intuitive Photo-Realistic 3D-Model Generation Wolfgang Sepp, Tim Bodenmueller, Michael Suppa, and Gerd Hirzinger DLR, Institut für Robotik und Mechatronik @ GI-Workshop VR/AR 2009 Folie
3D Modeling of Objects Using Laser Scanning
 1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
Project 2 due today Project 3 out today. Readings Szeliski, Chapter 10 (through 10.5)
") Announcements Stereo Project 2 due today Project 3 out today Single image stereogram, by Niklas Een Readings Szeliski, Chapter 10 (through 10.5) Public Library, Stereoscopic Looking Room, Chicago, by Phillips,
Announcements Stereo Project 2 due today Project 3 out today Single image stereogram, by Niklas Een Readings Szeliski, Chapter 10 (through 10.5) Public Library, Stereoscopic Looking Room, Chicago, by Phillips,
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Stereo. Many slides adapted from Steve Seitz
 Stereo Many slides adapted from Steve Seitz Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image image 1 image 2 Dense depth map Binocular stereo Given a calibrated
Stereo Many slides adapted from Steve Seitz Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image image 1 image 2 Dense depth map Binocular stereo Given a calibrated
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Multi-view stereo Announcements Project 3 ( Autostitch ) due Monday 4/17 by 11:59pm Recommended Reading Szeliski Chapter 11.6 Multi-View Stereo: A Tutorial Furukawa
CS5670: Computer Vision Noah Snavely Multi-view stereo Announcements Project 3 ( Autostitch ) due Monday 4/17 by 11:59pm Recommended Reading Szeliski Chapter 11.6 Multi-View Stereo: A Tutorial Furukawa
Image Based Reconstruction II
 Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Binocular stereo. Given a calibrated binocular stereo pair, fuse it to produce a depth image. Where does the depth information come from?
 Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Computer and Machine Vision
 Computer and Machine Vision Lecture Week 12 Part-2 Additional 3D Scene Considerations March 29, 2014 Sam Siewert Outline of Week 12 Computer Vision APIs and Languages Alternatives to C++ and OpenCV API
Computer and Machine Vision Lecture Week 12 Part-2 Additional 3D Scene Considerations March 29, 2014 Sam Siewert Outline of Week 12 Computer Vision APIs and Languages Alternatives to C++ and OpenCV API
Surround Structured Lighting for Full Object Scanning
 Surround Structured Lighting for Full Object Scanning Douglas Lanman, Daniel Crispell, and Gabriel Taubin Brown University, Dept. of Engineering August 21, 2007 1 Outline Introduction and Related Work
Surround Structured Lighting for Full Object Scanning Douglas Lanman, Daniel Crispell, and Gabriel Taubin Brown University, Dept. of Engineering August 21, 2007 1 Outline Introduction and Related Work
Project Ideas. Guido Gerig CS 6643, Computer Vision Spring 2016
 Project Ideas Guido Gerig CS 6643, Computer Vision Spring 2016 Final Project 3D CV Work on your own. Select a 3D vision method (examples given in slides). Develop a project that goes from input data to
Project Ideas Guido Gerig CS 6643, Computer Vision Spring 2016 Final Project 3D CV Work on your own. Select a 3D vision method (examples given in slides). Develop a project that goes from input data to
Estimating the surface normal of artwork using a DLP projector
 Estimating the surface normal of artwork using a DLP projector KOICHI TAKASE 1 AND ROY S. BERNS 2 1 TOPPAN Printing co., ltd. 2 Munsell Color Science Laboratory, Rochester Institute of Technology Summary:
Estimating the surface normal of artwork using a DLP projector KOICHI TAKASE 1 AND ROY S. BERNS 2 1 TOPPAN Printing co., ltd. 2 Munsell Color Science Laboratory, Rochester Institute of Technology Summary:
Recap from Previous Lecture
 Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
ENGN D Photography / Spring 2018 / SYLLABUS
 ENGN 2502 3D Photography / Spring 2018 / SYLLABUS Description of the proposed course Over the last decade digital photography has entered the mainstream with inexpensive, miniaturized cameras routinely
ENGN 2502 3D Photography / Spring 2018 / SYLLABUS Description of the proposed course Over the last decade digital photography has entered the mainstream with inexpensive, miniaturized cameras routinely
Lecture 19: Depth Cameras. Visual Computing Systems CMU , Fall 2013
 Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
CS4495/6495 Introduction to Computer Vision
 CS4495/6495 Introduction to Computer Vision 9C-L1 3D perception Some slides by Kelsey Hawkins Motivation Why do animals, people & robots need vision? To detect and recognize objects/landmarks Is that a
CS4495/6495 Introduction to Computer Vision 9C-L1 3D perception Some slides by Kelsey Hawkins Motivation Why do animals, people & robots need vision? To detect and recognize objects/landmarks Is that a
ENGN 2911 I: 3D Photography and Geometry Processing Assignment 2: Structured Light for 3D Scanning
 ENGN 2911 I: 3D Photography and Geometry Processing Assignment 2: Structured Light for 3D Scanning Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 26 February 2009 Figure 1: Structured
ENGN 2911 I: 3D Photography and Geometry Processing Assignment 2: Structured Light for 3D Scanning Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 26 February 2009 Figure 1: Structured
Talk plan. 3d model. Applications: cultural heritage 5/9/ d shape reconstruction from photographs: a Multi-View Stereo approach
 Talk plan 3d shape reconstruction from photographs: a Multi-View Stereo approach Introduction Multi-View Stereo pipeline Carlos Hernández George Vogiatzis Yasutaka Furukawa Google Aston University Google
Talk plan 3d shape reconstruction from photographs: a Multi-View Stereo approach Introduction Multi-View Stereo pipeline Carlos Hernández George Vogiatzis Yasutaka Furukawa Google Aston University Google
12/3/2009. What is Computer Vision? Applications. Application: Assisted driving Pedestrian and car detection. Application: Improving online search
 Introduction to Artificial Intelligence V22.0472-001 Fall 2009 Lecture 26: Computer Vision Rob Fergus Dept of Computer Science, Courant Institute, NYU Slides from Andrew Zisserman What is Computer Vision?
Introduction to Artificial Intelligence V22.0472-001 Fall 2009 Lecture 26: Computer Vision Rob Fergus Dept of Computer Science, Courant Institute, NYU Slides from Andrew Zisserman What is Computer Vision?
Filter Flow: Supplemental Material
 Filter Flow: Supplemental Material Steven M. Seitz University of Washington Simon Baker Microsoft Research We include larger images and a number of additional results obtained using Filter Flow [5]. 1
Filter Flow: Supplemental Material Steven M. Seitz University of Washington Simon Baker Microsoft Research We include larger images and a number of additional results obtained using Filter Flow [5]. 1
Computational Imaging for Self-Driving Vehicles
 CVPR 2018 Computational Imaging for Self-Driving Vehicles Jan Kautz--------Ramesh Raskar--------Achuta Kadambi--------Guy Satat Computational Imaging for Self-Driving Vehicles Jan Kautz--------Ramesh Raskar--------Achuta
CVPR 2018 Computational Imaging for Self-Driving Vehicles Jan Kautz--------Ramesh Raskar--------Achuta Kadambi--------Guy Satat Computational Imaging for Self-Driving Vehicles Jan Kautz--------Ramesh Raskar--------Achuta
Outline. ETN-FPI Training School on Plenoptic Sensing
 Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
CS4670/5760: Computer Vision Kavita Bala Scott Wehrwein. Lecture 23: Photometric Stereo
 CS4670/5760: Computer Vision Kavita Bala Scott Wehrwein Lecture 23: Photometric Stereo Announcements PA3 Artifact due tonight PA3 Demos Thursday Signups close at 4:30 today No lecture on Friday Last Time:
CS4670/5760: Computer Vision Kavita Bala Scott Wehrwein Lecture 23: Photometric Stereo Announcements PA3 Artifact due tonight PA3 Demos Thursday Signups close at 4:30 today No lecture on Friday Last Time:
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Other approaches to obtaining 3D structure
 Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Optical Guidance. Sanford L. Meeks. July 22, 2010
 Optical Guidance Sanford L. Meeks July 22, 2010 Optical Tracking Optical tracking is a means of determining in real-time the position of a patient relative to the treatment unit. Markerbased systems track
Optical Guidance Sanford L. Meeks July 22, 2010 Optical Tracking Optical tracking is a means of determining in real-time the position of a patient relative to the treatment unit. Markerbased systems track
Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection
 Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection Svorad Štolc et al. svorad.stolc@ait.ac.at AIT Austrian Institute of Technology GmbH Center
Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection Svorad Štolc et al. svorad.stolc@ait.ac.at AIT Austrian Institute of Technology GmbH Center
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Passive 3D Photography
 SIGGRAPH 99 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University http:// ://www.cs.cmu.edu/~seitz Talk Outline. Visual Cues 2. Classical Vision Algorithms 3. State of
SIGGRAPH 99 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University http:// ://www.cs.cmu.edu/~seitz Talk Outline. Visual Cues 2. Classical Vision Algorithms 3. State of
Spacetime Stereo: A Unifying Framework for Depth from Triangulation. Abstract
 Spacetime Stereo: A Unifying Framework for Depth from Triangulation James Davis Diego Nehab Ravi Ramamoorthi Szymon Rusinkiewicz Honda Research Institute Princeton University Columbia University Princeton
Spacetime Stereo: A Unifying Framework for Depth from Triangulation James Davis Diego Nehab Ravi Ramamoorthi Szymon Rusinkiewicz Honda Research Institute Princeton University Columbia University Princeton
Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by ) Readings Szeliski, Chapter 10 (through 10.5)
 Readings Szeliski, Chapter 10 (through 10.5)") Announcements Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by email) One-page writeup (from project web page), specifying:» Your team members» Project goals. Be specific.
Announcements Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by email) One-page writeup (from project web page), specifying:» Your team members» Project goals. Be specific.
Rendering. Converting a 3D scene to a 2D image. Camera. Light. Rendering. View Plane
 Rendering Pipeline Rendering Converting a 3D scene to a 2D image Rendering Light Camera 3D Model View Plane Rendering Converting a 3D scene to a 2D image Basic rendering tasks: Modeling: creating the world
Rendering Pipeline Rendering Converting a 3D scene to a 2D image Rendering Light Camera 3D Model View Plane Rendering Converting a 3D scene to a 2D image Basic rendering tasks: Modeling: creating the world
There are many cues in monocular vision which suggests that vision in stereo starts very early from two similar 2D images. Lets see a few...
 STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
Today. Stereo (two view) reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography
 reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography") Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Laser Eye a new 3D sensor for active vision
 Laser Eye a new 3D sensor for active vision Piotr Jasiobedzki1, Michael Jenkin2, Evangelos Milios2' Brian Down1, John Tsotsos1, Todd Campbell3 1 Dept. of Computer Science, University of Toronto Toronto,
Laser Eye a new 3D sensor for active vision Piotr Jasiobedzki1, Michael Jenkin2, Evangelos Milios2' Brian Down1, John Tsotsos1, Todd Campbell3 1 Dept. of Computer Science, University of Toronto Toronto,
Image-Based Modeling and Rendering. Image-Based Modeling and Rendering. Final projects IBMR. What we have learnt so far. What IBMR is about
 Image-Based Modeling and Rendering Image-Based Modeling and Rendering MIT EECS 6.837 Frédo Durand and Seth Teller 1 Some slides courtesy of Leonard McMillan, Wojciech Matusik, Byong Mok Oh, Max Chen 2
Image-Based Modeling and Rendering Image-Based Modeling and Rendering MIT EECS 6.837 Frédo Durand and Seth Teller 1 Some slides courtesy of Leonard McMillan, Wojciech Matusik, Byong Mok Oh, Max Chen 2
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
Lecture 9 & 10: Stereo Vision
 Lecture 9 & 10: Stereo Vision Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? IntroducEon to stereo vision Epipolar geometry: a gentle intro Parallel images Image receficaeon Solving
Lecture 9 & 10: Stereo Vision Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? IntroducEon to stereo vision Epipolar geometry: a gentle intro Parallel images Image receficaeon Solving
Making Machines See. Roberto Cipolla Department of Engineering. Research team
 Making Machines See Roberto Cipolla Department of Engineering Research team http://www.eng.cam.ac.uk/~cipolla/people.html Cognitive Systems Engineering Cognitive Systems Engineering Introduction Making
Making Machines See Roberto Cipolla Department of Engineering Research team http://www.eng.cam.ac.uk/~cipolla/people.html Cognitive Systems Engineering Cognitive Systems Engineering Introduction Making
Photometric stereo. Recovering the surface f(x,y) Three Source Photometric stereo: Step1. Reflectance Map of Lambertian Surface
 Three Source Photometric stereo: Step1. Reflectance Map of Lambertian Surface") Photometric stereo Illumination Cones and Uncalibrated Photometric Stereo Single viewpoint, multiple images under different lighting. 1. Arbitrary known BRDF, known lighting 2. Lambertian BRDF, known lighting
Photometric stereo Illumination Cones and Uncalibrated Photometric Stereo Single viewpoint, multiple images under different lighting. 1. Arbitrary known BRDF, known lighting 2. Lambertian BRDF, known lighting
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo In this lecture, we ll first discuss another framework for describing stereo systems called active stereo, and then introduce the problem of volumetric stereo,
Lecture 8 Active stereo & Volumetric stereo In this lecture, we ll first discuss another framework for describing stereo systems called active stereo, and then introduce the problem of volumetric stereo,
3D scanning. 3D scanning is a family of technologies created as a means of automatic measurement of geometric properties of objects.
 Acquiring 3D shape 3D scanning 3D scanning is a family of technologies created as a means of automatic measurement of geometric properties of objects. The produced digital model is formed by geometric
Acquiring 3D shape 3D scanning 3D scanning is a family of technologies created as a means of automatic measurement of geometric properties of objects. The produced digital model is formed by geometric
Computer Vision I - Image Matching and Image Formation
 Computer Vision I - Image Matching and Image Formation Carsten Rother 10/12/2014 Computer Vision I: Image Formation Process Computer Vision I: Image Formation Process 10/12/2014 2 Roadmap for next five
Computer Vision I - Image Matching and Image Formation Carsten Rother 10/12/2014 Computer Vision I: Image Formation Process Computer Vision I: Image Formation Process 10/12/2014 2 Roadmap for next five
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
Handy Rangefinder for Active Robot Vision
 Handy Rangefinder for Active Robot Vision Kazuyuki Hattori Yukio Sato Department of Electrical and Computer Engineering Nagoya Institute of Technology Showa, Nagoya 466, Japan Abstract A compact and high-speed
Handy Rangefinder for Active Robot Vision Kazuyuki Hattori Yukio Sato Department of Electrical and Computer Engineering Nagoya Institute of Technology Showa, Nagoya 466, Japan Abstract A compact and high-speed
Chaplin, Modern Times, 1936
 Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Measurement of 3D Foot Shape Deformation in Motion
 Measurement of 3D Foot Shape Deformation in Motion Makoto Kimura Masaaki Mochimaru Takeo Kanade Digital Human Research Center National Institute of Advanced Industrial Science and Technology, Japan The
Measurement of 3D Foot Shape Deformation in Motion Makoto Kimura Masaaki Mochimaru Takeo Kanade Digital Human Research Center National Institute of Advanced Industrial Science and Technology, Japan The
The main problem of photogrammetry
 Structured Light Structured Light The main problem of photogrammetry to recover shape from multiple views of a scene, we need to find correspondences between the images the matching/correspondence problem
Structured Light Structured Light The main problem of photogrammetry to recover shape from multiple views of a scene, we need to find correspondences between the images the matching/correspondence problem
Optical Imaging Techniques and Applications
 Optical Imaging Techniques and Applications Jason Geng, Ph.D. Vice President IEEE Intelligent Transportation Systems Society jason.geng@ieee.org Outline Structured light 3D surface imaging concept Classification
Optical Imaging Techniques and Applications Jason Geng, Ph.D. Vice President IEEE Intelligent Transportation Systems Society jason.geng@ieee.org Outline Structured light 3D surface imaging concept Classification
Multi-view reconstruction for projector camera systems based on bundle adjustment
 Multi-view reconstruction for projector camera systems based on bundle adjustment Ryo Furuakwa, Faculty of Information Sciences, Hiroshima City Univ., Japan, ryo-f@hiroshima-cu.ac.jp Kenji Inose, Hiroshi
Multi-view reconstruction for projector camera systems based on bundle adjustment Ryo Furuakwa, Faculty of Information Sciences, Hiroshima City Univ., Japan, ryo-f@hiroshima-cu.ac.jp Kenji Inose, Hiroshi
Space-Time Stereo. 1 Introduction. Spacetime Stereo. Paper ID: 521. Abstract
 Space-Time Stereo Paper ID: 521 Abstract Depth from triangulation has traditionally been treated in a number of separate threads in the computer vision literature, with methods like stereo, laser scanning,
Space-Time Stereo Paper ID: 521 Abstract Depth from triangulation has traditionally been treated in a number of separate threads in the computer vision literature, with methods like stereo, laser scanning,
Lecture 10 Multi-view Stereo (3D Dense Reconstruction) Davide Scaramuzza
 Davide Scaramuzza") Lecture 10 Multi-view Stereo (3D Dense Reconstruction) Davide Scaramuzza REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time, ICRA 14, by Pizzoli, Forster, Scaramuzza [M. Pizzoli, C. Forster,
Lecture 10 Multi-view Stereo (3D Dense Reconstruction) Davide Scaramuzza REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time, ICRA 14, by Pizzoli, Forster, Scaramuzza [M. Pizzoli, C. Forster,
Some books on linear algebra
 Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
A High Speed Face Measurement System
 A High Speed Face Measurement System Kazuhide HASEGAWA, Kazuyuki HATTORI and Yukio SATO Department of Electrical and Computer Engineering, Nagoya Institute of Technology Gokiso, Showa, Nagoya, Japan, 466-8555
A High Speed Face Measurement System Kazuhide HASEGAWA, Kazuyuki HATTORI and Yukio SATO Department of Electrical and Computer Engineering, Nagoya Institute of Technology Gokiso, Showa, Nagoya, Japan, 466-8555
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus
 Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
Non-line-of-sight imaging
 Non-line-of-sight imaging http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 25 Course announcements Homework 6 will be posted tonight. - Will
Non-line-of-sight imaging http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 25 Course announcements Homework 6 will be posted tonight. - Will
DEPTH AND GEOMETRY FROM A SINGLE 2D IMAGE USING TRIANGULATION
 2012 IEEE International Conference on Multimedia and Expo Workshops DEPTH AND GEOMETRY FROM A SINGLE 2D IMAGE USING TRIANGULATION Yasir Salih and Aamir S. Malik, Senior Member IEEE Centre for Intelligent
2012 IEEE International Conference on Multimedia and Expo Workshops DEPTH AND GEOMETRY FROM A SINGLE 2D IMAGE USING TRIANGULATION Yasir Salih and Aamir S. Malik, Senior Member IEEE Centre for Intelligent
CSE 4392/5369. Dr. Gian Luca Mariottini, Ph.D.
 University of Texas at Arlington CSE 4392/5369 Introduction to Vision Sensing Dr. Gian Luca Mariottini, Ph.D. Department of Computer Science and Engineering University of Texas at Arlington WEB : http://ranger.uta.edu/~gianluca
University of Texas at Arlington CSE 4392/5369 Introduction to Vision Sensing Dr. Gian Luca Mariottini, Ph.D. Department of Computer Science and Engineering University of Texas at Arlington WEB : http://ranger.uta.edu/~gianluca
The 7d plenoptic function, indexing all light.
 Previous Lecture The 7d plenoptic function, indexing all light. Lightfields: a 4d (not 5d!) data structure which captures all outgoing light from a region and permits reconstruction of arbitrary synthetic
Previous Lecture The 7d plenoptic function, indexing all light. Lightfields: a 4d (not 5d!) data structure which captures all outgoing light from a region and permits reconstruction of arbitrary synthetic
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
3D Computer Vision Introduction
 3D Computer Vision Introduction Tom Henderson CS 6320 S2014 tch@cs.utah.edu Acknowledgements: slides from Guido Gerig (Utah) & Marc Pollefeys, UNC Chapel Hill) Administration Classes: M & W, 1:25-2:45
3D Computer Vision Introduction Tom Henderson CS 6320 S2014 tch@cs.utah.edu Acknowledgements: slides from Guido Gerig (Utah) & Marc Pollefeys, UNC Chapel Hill) Administration Classes: M & W, 1:25-2:45
Stereo. Outline. Multiple views 3/29/2017. Thurs Mar 30 Kristen Grauman UT Austin. Multi-view geometry, matching, invariant features, stereo vision
 Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Mapping textures on 3D geometric model using reflectance image
 Mapping textures on 3D geometric model using reflectance image Ryo Kurazume M. D. Wheeler Katsushi Ikeuchi The University of Tokyo Cyra Technologies, Inc. The University of Tokyo fkurazume,kig@cvl.iis.u-tokyo.ac.jp
Mapping textures on 3D geometric model using reflectance image Ryo Kurazume M. D. Wheeler Katsushi Ikeuchi The University of Tokyo Cyra Technologies, Inc. The University of Tokyo fkurazume,kig@cvl.iis.u-tokyo.ac.jp
HIGH SPEED 3-D MEASUREMENT SYSTEM USING INCOHERENT LIGHT SOURCE FOR HUMAN PERFORMANCE ANALYSIS
 HIGH SPEED 3-D MEASUREMENT SYSTEM USING INCOHERENT LIGHT SOURCE FOR HUMAN PERFORMANCE ANALYSIS Takeo MIYASAKA, Kazuhiro KURODA, Makoto HIROSE and Kazuo ARAKI School of Computer and Cognitive Sciences,
HIGH SPEED 3-D MEASUREMENT SYSTEM USING INCOHERENT LIGHT SOURCE FOR HUMAN PERFORMANCE ANALYSIS Takeo MIYASAKA, Kazuhiro KURODA, Makoto HIROSE and Kazuo ARAKI School of Computer and Cognitive Sciences,
Faces and Image-Based Lighting
 Announcements Faces and Image-Based Lighting Project #3 artifacts voting Final project: Demo on 6/25 (Wednesday) 13:30pm in this room Reports and videos due on 6/26 (Thursday) 11:59pm Digital Visual Effects,
Announcements Faces and Image-Based Lighting Project #3 artifacts voting Final project: Demo on 6/25 (Wednesday) 13:30pm in this room Reports and videos due on 6/26 (Thursday) 11:59pm Digital Visual Effects,
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.
![All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.](/thumbs/91/106597332.jpg "All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.") All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
3D Scanning. Lecture courtesy of Szymon Rusinkiewicz Princeton University
 3D Scanning Lecture courtesy of Szymon Rusinkiewicz Princeton University Computer Graphics Pipeline 3D Scanning Shape Motion Rendering Lighting and Reflectance Human time = expensive Sensors = cheap Computer
3D Scanning Lecture courtesy of Szymon Rusinkiewicz Princeton University Computer Graphics Pipeline 3D Scanning Shape Motion Rendering Lighting and Reflectance Human time = expensive Sensors = cheap Computer
ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows
 ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 29 January 2009 Figure 1: 3D Photography
ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 29 January 2009 Figure 1: 3D Photography
A Comparison between Active and Passive 3D Vision Sensors: BumblebeeXB3 and Microsoft Kinect
 A Comparison between Active and Passive 3D Vision Sensors: BumblebeeXB3 and Microsoft Kinect Diana Beltran and Luis Basañez Technical University of Catalonia, Barcelona, Spain {diana.beltran,luis.basanez}@upc.edu
A Comparison between Active and Passive 3D Vision Sensors: BumblebeeXB3 and Microsoft Kinect Diana Beltran and Luis Basañez Technical University of Catalonia, Barcelona, Spain {diana.beltran,luis.basanez}@upc.edu
Using a Raster Display Device for Photometric Stereo
 DEPARTMEN T OF COMP UTING SC IENC E Using a Raster Display Device for Photometric Stereo Nathan Funk & Yee-Hong Yang CRV 2007 May 30, 2007 Overview 2 MODEL 3 EXPERIMENTS 4 CONCLUSIONS 5 QUESTIONS 1. Background
DEPARTMEN T OF COMP UTING SC IENC E Using a Raster Display Device for Photometric Stereo Nathan Funk & Yee-Hong Yang CRV 2007 May 30, 2007 Overview 2 MODEL 3 EXPERIMENTS 4 CONCLUSIONS 5 QUESTIONS 1. Background
Ligh%ng and Reflectance
 Ligh%ng and Reflectance 2 3 4 Ligh%ng Ligh%ng can have a big effect on how an object looks. Modeling the effect of ligh%ng can be used for: Recogni%on par%cularly face recogni%on Shape reconstruc%on Mo%on
Ligh%ng and Reflectance 2 3 4 Ligh%ng Ligh%ng can have a big effect on how an object looks. Modeling the effect of ligh%ng can be used for: Recogni%on par%cularly face recogni%on Shape reconstruc%on Mo%on
Image-Based Modeling and Rendering
 Image-Based Modeling and Rendering Richard Szeliski Microsoft Research IPAM Graduate Summer School: Computer Vision July 26, 2013 How far have we come? Light Fields / Lumigraph - 1996 Richard Szeliski
Image-Based Modeling and Rendering Richard Szeliski Microsoft Research IPAM Graduate Summer School: Computer Vision July 26, 2013 How far have we come? Light Fields / Lumigraph - 1996 Richard Szeliski