Stereo and structured light
|
|
|
- Allan Moody
- 5 years ago
- Views:
Transcription
1 Stereo and structured light , , Computational Photography Fall 2018, Lecture 20
2 Course announcements Homework 5 is still ongoing. - Make sure to download updated version! - Any questions about homework 5? How many of you attended Eric Fossum s talk? Guest lecture on Wednesday: Han Joo will talk about the panoptic studio.

3 CMU s Panoptic Studio
4 Overview of today s lecture Revisiting triangulation. Disparity. Stereo rectification. Stereo matching. Structured light. Binary coding. Dealing with global illumination. Epipolar imaging.
5 Slide credits Many of these slides were adapted directly from: Kris Kitani (16-385, Spring 2017). Srinivasa Narasimhan (16-820, Spring 2017). Mohit Gupta (Wisconsin).
6 Revisiting triangulation
7 How would you reconstruct 3D points? Left image Right image
8 How would you reconstruct 3D points? Left image Right image 1. Select point in one image
9 How would you reconstruct 3D points? Left image Right image 1. Select point in one image 2. Form epipolar line for that point in second image (how?)
10 How would you reconstruct 3D points? Left image Right image 1. Select point in one image 2. Form epipolar line for that point in second image (how?) 3. Find matching point along line (how?)

 3. Find matching point along line (how?) 4.")
11 How would you reconstruct 3D points? Left image Right image 1. Select point in one image 2. Form epipolar line for that point in second image (how?) 3. Find matching point along line (how?) 4. Perform triangulation (how?)


12 Triangulation 3D point left image right image left camera with matrix right camera with matrix
13 Stereo rectification
14 What s different between these two images?

15

16
17 Objects that are close move more or less?
18 The amount of horizontal movement is inversely proportional to

19 The amount of horizontal movement is inversely proportional to the distance from the camera. More formally
20 3D point image plane camera center camera center
21 (baseline)
22 How is X related to x? (baseline)

23 (baseline)
24 (baseline) How is X related to x?
25 (baseline)

26 (baseline) Disparity (wrt to camera origin of image plane)
27 (baseline) Disparity inversely proportional to depth

28 Real-time stereo sensing Nomad robot searches for meteorites in Antartica


29 Pre-collision braking Subaru Eyesight system
30 What other vision system uses disparity for depth sensing?
31
32
33
34
35


36 This is how 3D movies work
37 So can I compute depth using disparity from any two images of the same object?
38 So can I compute depth using disparity from any two images of the same object? 1. Need sufficient baseline 2. Images need to be rectified first (make epipolar lines horizontal)
39 How can you make the epipolar lines horizontal?
40 3D point image plane camera center camera center What s special about these two cameras?

41
42 When are epipolar lines horizontal? x x t
43 When are epipolar lines horizontal? When this relationship holds: R = I t = (T, 0, 0) x x t
44 When are epipolar lines horizontal? When this relationship holds: R = I t = (T, 0, 0) Let s try this out x t x This always has to hold:
 Let s try this out x t x This")
45 When are epipolar lines horizontal? When this relationship holds: R = I t = (T, 0, 0) Let s try this out x t x This always has to hold: Write out the constraint
 Let s try this out x t Write out the constraint x This always has to hold: The")
46 When are epipolar lines horizontal? When this relationship holds: R = I t = (T, 0, 0) Let s try this out x t Write out the constraint x This always has to hold: The image of a 3D point will always be on the same horizontal line y coordinate is always the same!


47 It s hard to make the image planes exactly parallel
48 How can you make the epipolar lines horizontal?
49 Use stereo rectification
50 What is stereo rectification? Reproject image planes onto a common plane parallel to the line between camera centers Need two homographies (3x3 transform), one for each input image reprojection C. Loop and Z. Zhang. Computing Rectifying Homographies for Stereo Vision.Computer Vision and Pattern Recognition, 1999.
51 Stereo Rectification 1. Rotate the right camera by R (aligns camera coordinate system orientation only) 2. Rotate (rectify) the left camera so that the epipole is at infinity 3. Rotate (rectify) the right camera so that the epipole is at infinity 4. Adjust the scale


52 What do we do after rectifying the two image planes?
53 Stereo matching

54 Depth Estimation via Stereo Matching
55 1. Rectify images (make epipolar lines horizontal) 2. For each pixel a. Find epipolar line b. Scan line for best match c. Compute depth from disparity How would you do this?
56 When are correspondences difficult?

57 When are correspondences difficult? textureless regions repeated patterns specularities
58 Structured light

59 Use controlled ( structured ) light to make correspondences easier Disparity between laser points on the same scanline in the images determines the 3-D coordinates of the laser point on object

60 Use controlled ( structured ) light to make correspondences easier
61 Structured light and two cameras laser I J
62 Structured light and one camera Projector acts like reverse camera I J

63 Structured Light Any spatio-temporal pattern of light projected on a surface (or volume). Cleverly illuminate the scene to extract scene properties (eg., 3D). Avoids problems of 3D estimation in scenes with complex texture/brdfs. Very popular in vision and successful in industrial applications (parts assembly, inspection, etc).


64 3D Scanning using structured light
65 Do we need to illuminate the scene point by point?
66 Light Stripe Scanning Single Stripe Light plane Source Camera Surface Faster optical triangulation: Project a single stripe of laser light Scan it across the surface of the object This is a very precise version of structured light scanning Good for high resolution 3D, but still needs many images and takes time
67 Triangulation Light Plane Object Ax + By + Cz + D = 0 Laser Camera Project laser stripe onto object
68 Triangulation Light Plane Object Ax + By + Cz + D = 0 Laser Image Point ( x', y ' ) Camera Depth from ray-plane triangulation: Intersect camera ray with light plane x y = = x' z / y ' z / f f z = Ax Df ' + By ' + Cf
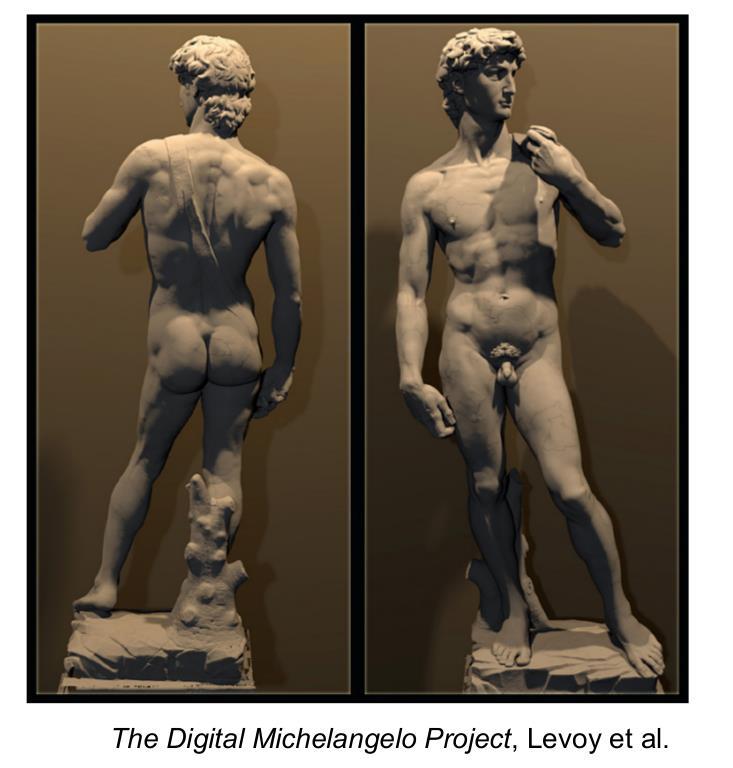
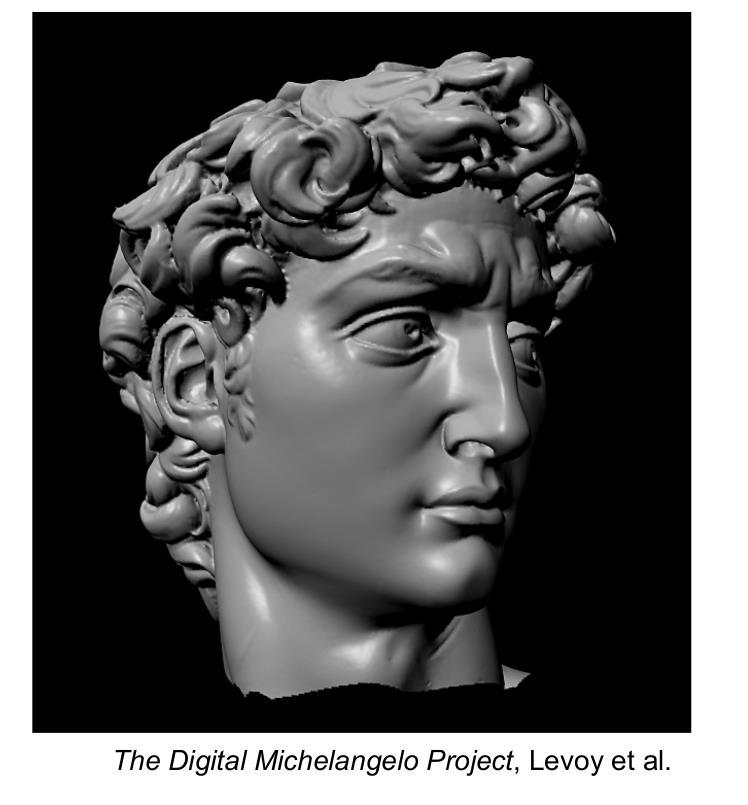
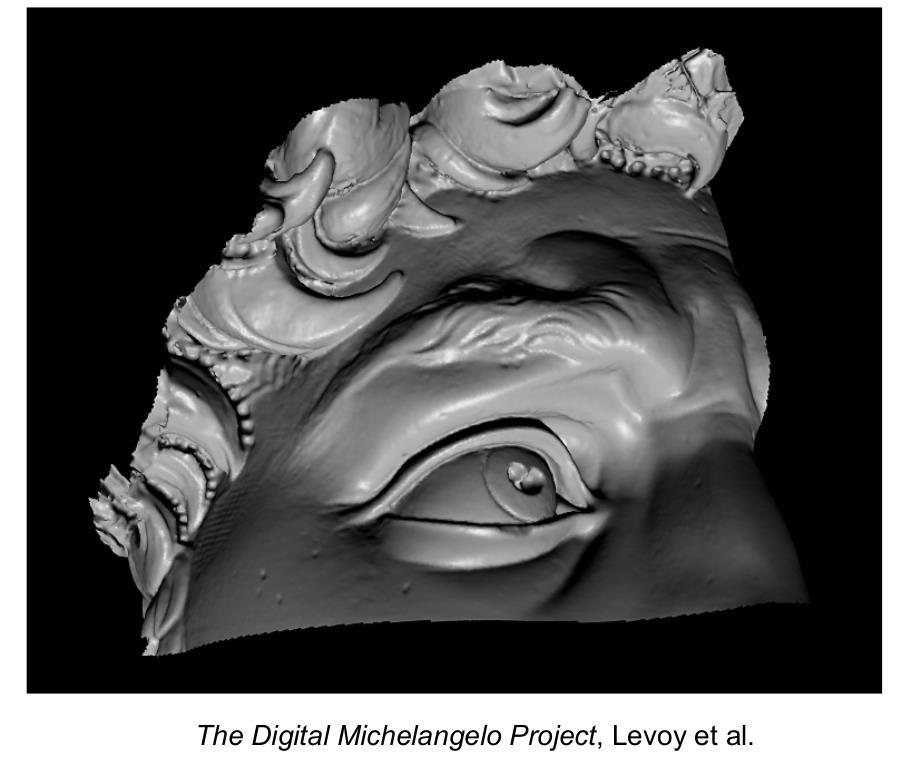
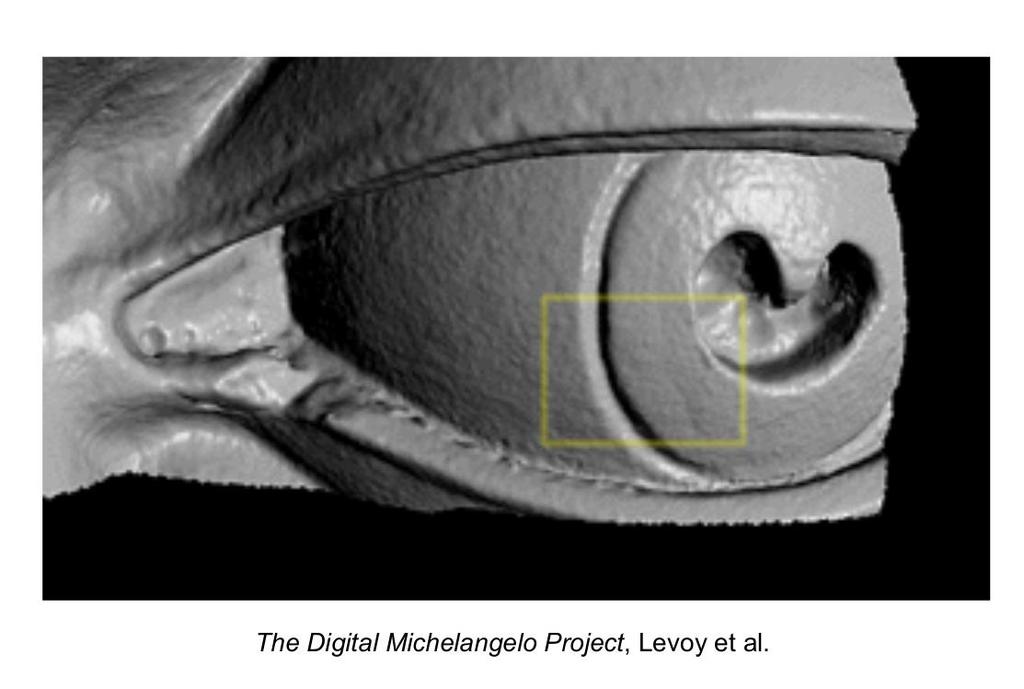
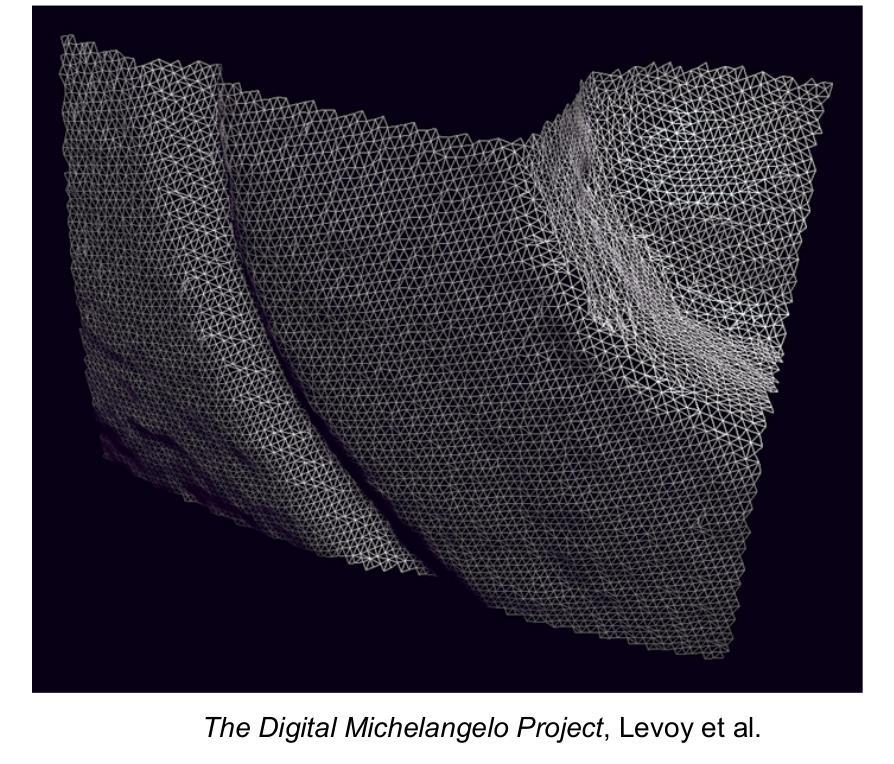
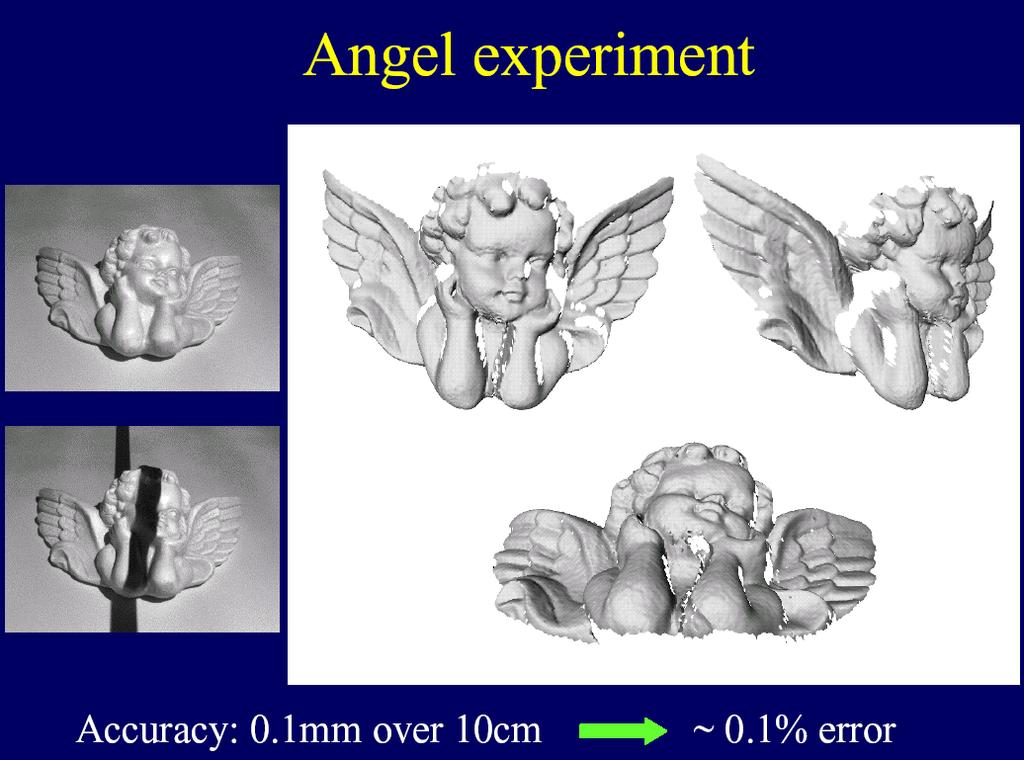
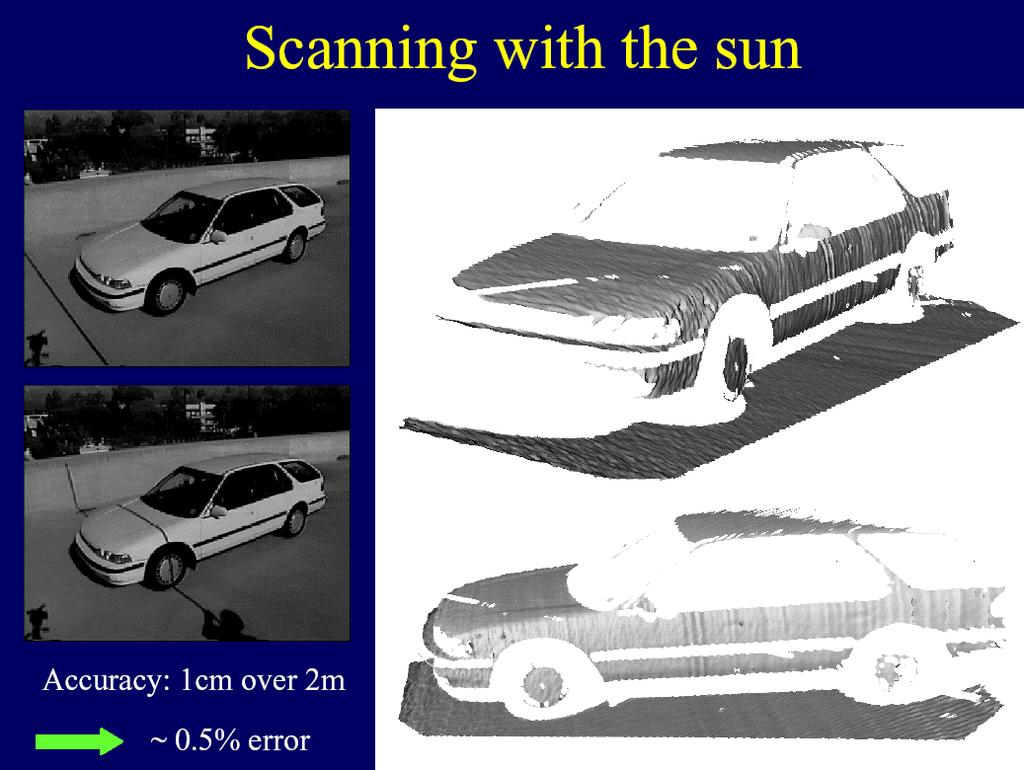
69 Example: Laser scanner Digital Michelangelo Project
70
71
72
73
74


")

75 Portable 3D laser scanner (this one by Minolta)
76 Faster Acquisition?
77 Binary coding
78 Faster Acquisition? Project multiple stripes simultaneously What is the problem with this?
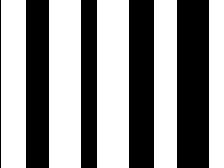
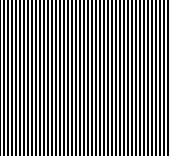
79 Faster Acquisition? Project multiple stripes simultaneously Correspondence problem: which stripe is which? Common types of patterns: Binary coded light striping Gray/color coded light striping
80 Binary Coding Faster: n 2 1 stripes in n images. Projected over time Example: 3 binary-encoded patterns which allows the measuring surface to be divided in 8 sub-regions Pattern 3 Pattern 2 Pattern 1

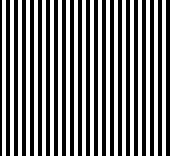
81 Binary Coding Assign each stripe a unique illumination code over time [Posdamer 82] Time Space




82 Binary Coding Example: 7 binary patterns proposed by Posdamer & Altschuler Projected over time Pattern 3 Pattern 2 Codeword of this píxel: identifies the corresponding pattern stripe Pattern 1



83 More complex patterns Works despite complex appearances Works in real-time and on dynamic scenes Need very few images (one or two). But needs a more complex correspondence algorithm


84 Continuum of Triangulation Methods Multi-stripe Multi-frame Single-stripe Single-frame Slow, robust Fast, fragile
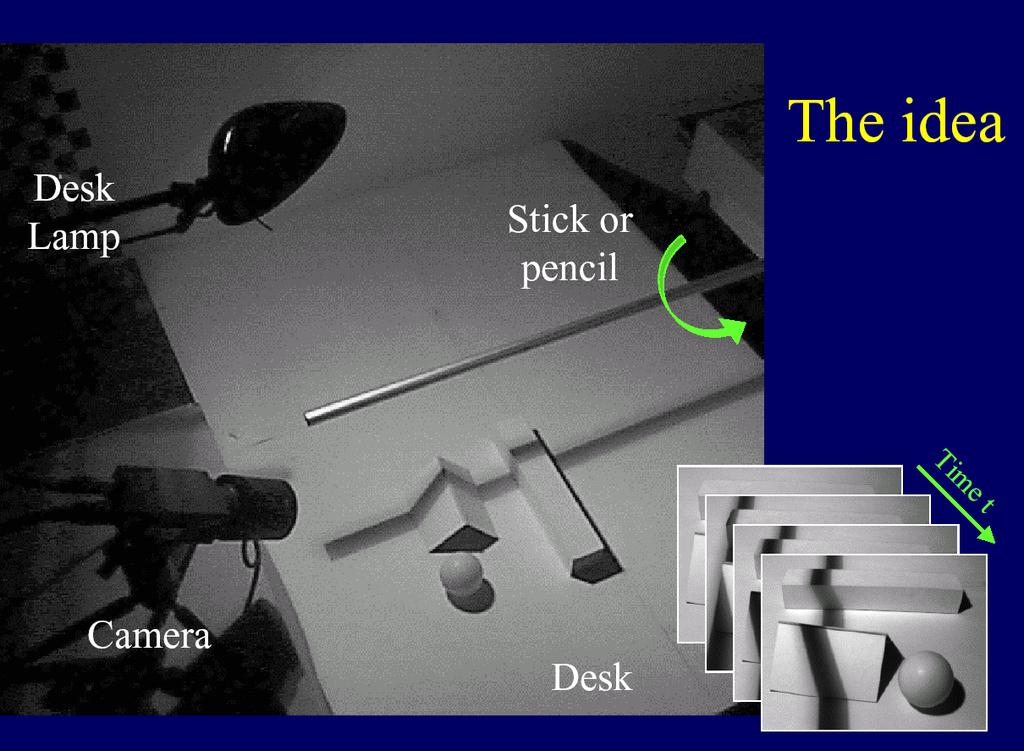
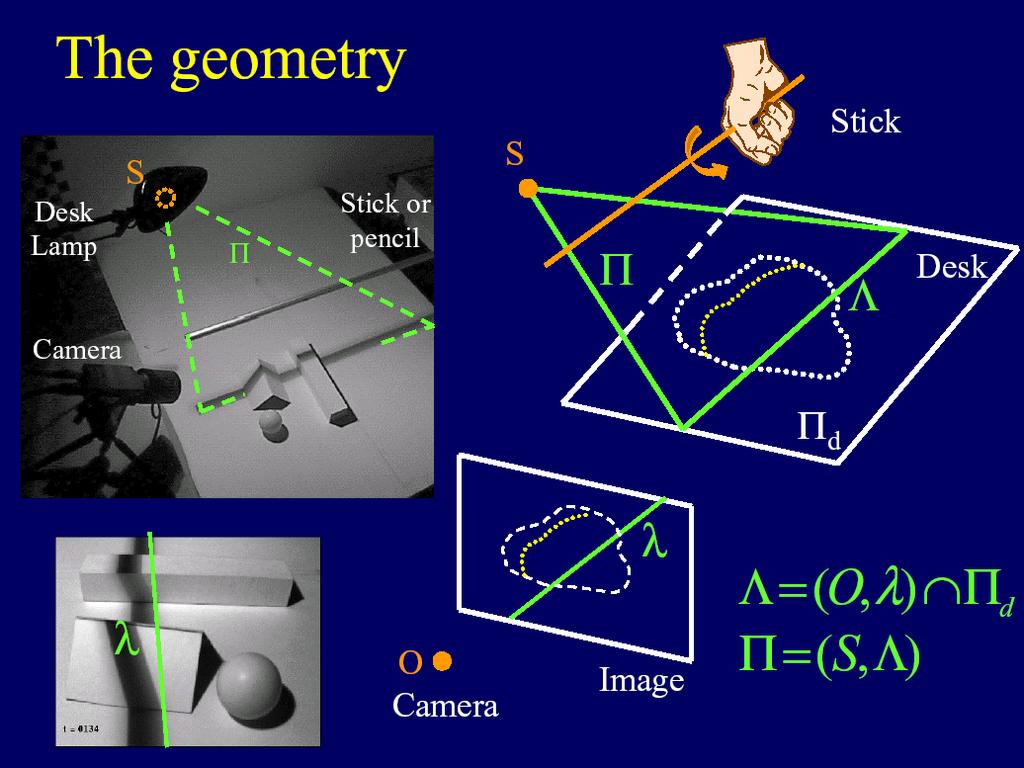
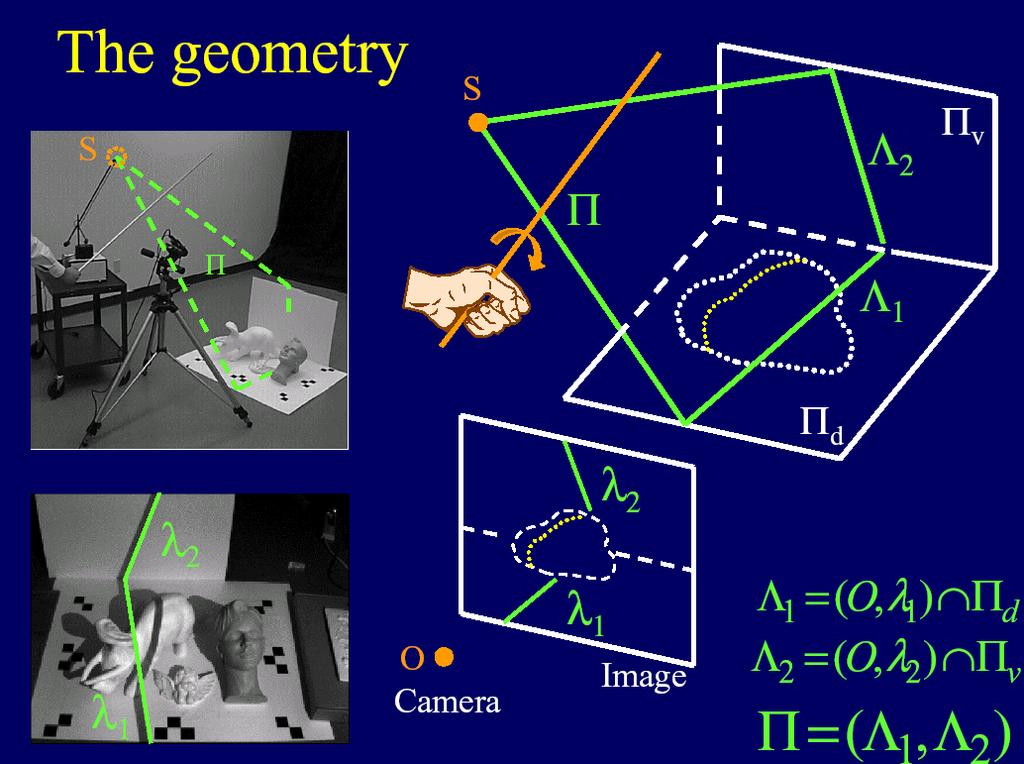
85 Using shadows
86
87
88
89
90
91
92 The 3D scanning pipeline

93 3D Model Acquisition Pipeline 3D Scanner


94 3D Model Acquisition Pipeline 3D Scanner View Planning

95 3D Model Acquisition Pipeline 3D Scanner View Planning Alignment
96 3D Model Acquisition Pipeline 3D Scanner View Planning Alignment Merging
97 3D Model Acquisition Pipeline 3D Scanner View Planning Alignment Done? Merging
98 3D Model Acquisition Pipeline 3D Scanner View Planning Alignment Done? Merging Display
99 Dealing with global illumination



100 Light Transport Volumetric Scattering Inter-reflections Light Source Direct Illumination Sub-surface scattering Scene 100 Slide adapted from Nayar et al
101 Why is global illumination a problem?
102 Bowl on a Marble Slab



103 Captured images under conventional Gray codes Lowest Frequency Illumination Highest Frequency Illumination Pattern 1 Pattern 4 Pattern 7 Pattern
104 Issues due to global illumination effects Strong Inter-reflections Blurring due to Sub-surface Scattering Low-frequency pattern High-frequency pattern
 Modulated Phase-Shifting (162")
105 3D Visualizations: State of the Art Errors due to interreflections Errors due to sub-surface scattering Conventional Gray (11 images) Modulated Phase-Shifting (162 images)
106 V-Groove Scene Inter-reflections


107 Conventional Gray codes Low frequency pattern Inverse Pattern Pattern Edge I = 0.16 I = 0.25 Captured Image Captured Image

")
108 Binarization error Errors due to inter-reflections Incorrect Binarization Ground-truth Binarization One (illuminated) Zero (not-illuminated)
109 Why is the Decoding Incorrect for Low-frequencies? Pattern Edge I = 0.16 I = 0.25 Captured Image Captured Image I = Direct + a. Global I = (1 a). Global a ~= 0, Direct < Global => I < I



110 Binarization for high-frequency pattern Pattern Inverse Pattern I = 0.25 I = 0.16 Captured Image I = Direct Global > Captured Image I = 0.5 Global

111 High-frequency Patterns are Decoded Correctly Captured Image Binary Decoding
112 Preventing errors due to long-range effects Logical Coding and Decoding 112
113 Logical Coding and Decoding = XOR Binarization Binarization Binarization Incorrect Binarization Correct Binarization
 1200 1100 1000 900 800 700 600 0 200 400 600 800 Pixels Ground Truth Gray Codes Our XOR-04")
114 Depth (mm) Depth Map Comparison Errors due to Inter-reflections Conventional Gray Codes (11 images) Our XOR-04 Codes (11 images) Pixels Ground Truth Gray Codes Our XOR-04 Codes
 XOR of Second-last Pattern with Patterns 1-8 XOR-04 Codes (10")
115 Making the Logical XOR Codes Base PlaneBase Plane Conventional Gray Codes (10 patterns) XOR of Last Pattern with Patterns 1-9 XOR-02 Codes (10 patterns) XOR of Second-last Pattern with Patterns 1-8 XOR-04 Codes (10 patterns)


116 Gray Codes with Low Spatial Frequencies Max min-stripe-width Gray Codes Conventional Gray Codes

 XOR-04 (10 images)")
117 Ensemble of Codes for General Scenes Conventional Gray (10 images) Max min-sw Gray (10 images) XOR-04 (10 images) XOR-02 (10 images)
118 Reconstructing General Scenes
 Return the")
 XOR-04 (10")
119 Ensemble of Codes for General Scenes Conventional Gray (10 images) Return the consistent value Max min-sw Gray (10 images) Ensemble of Codes (41 images) XOR-04 (10 images) XOR-02 (10 images)

")
120 Shape Comparison Conventional Gray (11 images) Modulated Phase-Shifting (162 images) Our Technique (41 images)
 Error-Detection (all four codes")
121 Qualitative Light Transport Analysis Sub-surface Scattering (Both Gray codes agree) All four codes agree Inter-reflections (Both XOR codes agree) Error-Detection (all four codes different)
 Our Ensemble Codes (41")
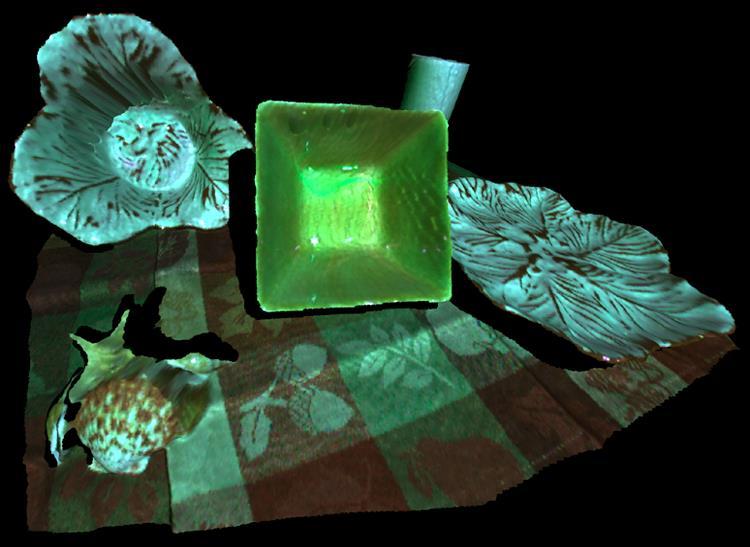
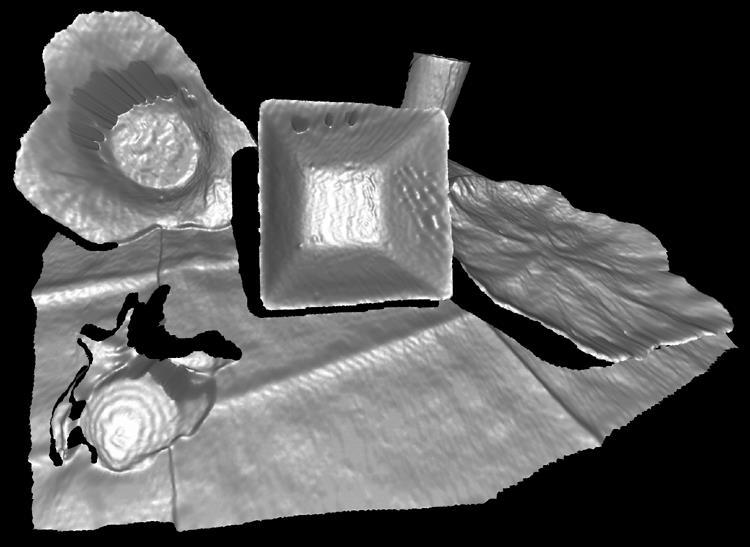
122 Translucent Wax Candle Errors due to strong sub-surface scattering Scene Modulated Phase- Shifting (162 images) Our Ensemble Codes (41 images)
123 Translucent Wax Object Errors due to strong sub-surface scattering Scene Modulated Phase- Shifting (162 images) Our Ensemble Codes (41 images)

124 Diffusion + Inter-reflections Ikea Lamp
 Our Ensemble Codes (41")
125 Depth-Map Comparison Regular Gray Codes (11 images) Our Ensemble Codes (41 images)

126 3D Visualization using our ensemble codes

127 Shower Curtain Diffusion + Inter-reflections Goal is to reconstruct the shape of the shower-curtain. Shape of the curtain is planar because it was taped to the rod to avoid movement while capture.



128 Shape Comparisons Regular Gray Codes (11 images) Phase-Shifting (18 images) Our XOR Codes (11 images)

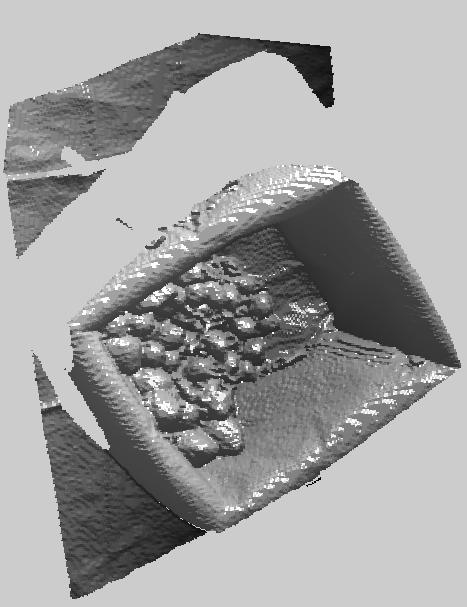
129 Fruit Basket: Multiple Effects Sub-surface Scattering Inter-reflections
130 Depth-maps with previous state of the art Regular Gray (11 images) Phase-Shifting (18 images)
 Modulated Phase-Shifting (162")
131 Depth-maps with previous state of the art Regular Gray (11 images) Modulated Phase-Shifting (162 images)
132 Depth-maps with our Ensemble Codes Our Ensemble Codes (41 images)

133 3D Visualizations with our ensemble codes

134 3D Visualization with our ensemble codes

135 Bowls and Milk: Multiple Effects Subsurface Scattering Interreflections
 Regular Gray Codes (11 images) Our XOR Codes (11")
136 Phase-Shifting (18 images) Modulated Phase-Shifting (162 images) Regular Gray Codes (11 images) Our XOR Codes (11 images)
137 3D Visualizations with our ensemble codes

138 Flower-Vase Diffusion Sub-surface Scattering
139 Comparison Phase-Shifting (18 images) Regular Gray Code (11 images) Modulated Phase-Shifting (162 images) Our Ensemble Codes (41 images)
 Our Ensemble Codes (41")
140 Comparison Phase-Shifting (18 images) Regular Gray Code (11 images) Modulated Phase-Shifting (162 images) Our Ensemble Codes (41 images)


141 Multiple Global Illumination Effects Wax Bowl Shape Using Ensemble Codes


142 Multiple Global Illumination Effects Deep Wax Container Shape Using Ensemble Codes

143 Lamp made of shiny brushed metal Strong and high-frequency inter-reflections
 Our Ensemble Codes (41")
144 Depth Map Comparison Regular Gray (11 images) Our Ensemble Codes (41 images)
145 Another look at epipolar imaging

146 Rectified camera-projector pair. Epipolar imaging camera

147 Regular Imaging Light Source Sensor
148 Regular Imaging Light Source Sensor
149 Regular Imaging Light Source Sensor
150 Regular Imaging Light Source Sensor
151 Epipolar Imaging Epipolar Plane Light Source Sensor & Mask
152 Epipolar Imaging Light Source Sensor & Mask
153 Epipolar Imaging Light Source Complete Image
154 Epipolar Imaging Light Source Sensor & Mask

155 Epipolar Imaging Light Source Sensor & Mask
156 References Basic reading: Szeliski textbook, Sections 7.1, 11.1, Lanman and Taubin, Build Your Own 3D Scanner: Optical Triangulation for Beginners, SIGGRAPH course this very comprehensive course has everything you need to know about 3D scanning using structured light, including details on how to build your own. Gupta et al., A Practical Approach to 3D Scanning in the Presence of Interreflections, Subsurface Scattering and Defocus, IJCV this paper has a very detailed treatment of problems to structured-light-based 3D scanning caused because of global illumination, and proposes the robust XOR patterns we discussed. Additional reading: Gupta et al., A Combined Theory of Defocused Illumination and Global Light Transport, IJCV an earlier paper discussing global illumination and 3D scanning with structured light. O Toole et al., Homogeneous codes for energy-efficient illumination and imaging, SIGGRAPH the epipolar imaging paper we covered in a previous class also includes a discussion of how epipolar imaging helps when performing stereo-based 3D scanning in the presence of global illumination.
157 References Basic reading: Szeliski textbook, Section 8.1 (not ), Chapter 11, Section Hartley and Zisserman, Section
Structured light , , Computational Photography Fall 2017, Lecture 27
 Structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 27 Course announcements Homework 5 has been graded. - Mean: 129. - Median:
Structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 27 Course announcements Homework 5 has been graded. - Mean: 129. - Median:
L2 Data Acquisition. Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods
 Structured light Range images Shape from shading Other methods") L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
Stereo Vision Computer Vision (Kris Kitani) Carnegie Mellon University
 Carnegie Mellon University") Stereo Vision 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University What s different between these two images? Objects that are close move more or less? The amount of horizontal movement is
Stereo Vision 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University What s different between these two images? Objects that are close move more or less? The amount of horizontal movement is
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Project 2 due today Project 3 out today. Readings Szeliski, Chapter 10 (through 10.5)
") Announcements Stereo Project 2 due today Project 3 out today Single image stereogram, by Niklas Een Readings Szeliski, Chapter 10 (through 10.5) Public Library, Stereoscopic Looking Room, Chicago, by Phillips,
Announcements Stereo Project 2 due today Project 3 out today Single image stereogram, by Niklas Een Readings Szeliski, Chapter 10 (through 10.5) Public Library, Stereoscopic Looking Room, Chicago, by Phillips,
Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV Venus de Milo
 Vision Sensing Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV 2007 Venus de Milo The Digital Michelangelo Project, Stanford How to sense 3D very accurately? How to sense
Vision Sensing Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV 2007 Venus de Milo The Digital Michelangelo Project, Stanford How to sense 3D very accurately? How to sense
CS5670: Computer Vision
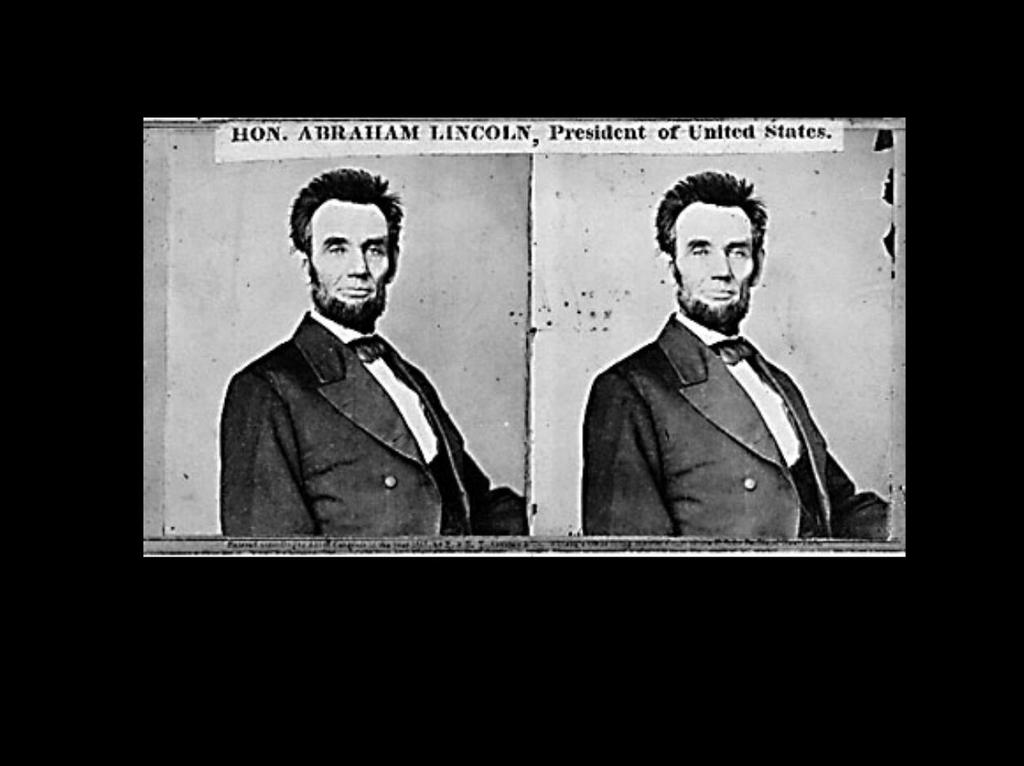
 CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
Computer Vision. 3D acquisition
 è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
Stereo vision. Many slides adapted from Steve Seitz
 Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Binocular stereo. Given a calibrated binocular stereo pair, fuse it to produce a depth image. Where does the depth information come from?
 Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
Computational light transport
 Computational light transport http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 19 Course announcements Homework 5 has been posted. - Due on
Computational light transport http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 19 Course announcements Homework 5 has been posted. - Due on
Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by ) Readings Szeliski, Chapter 10 (through 10.5)
 Readings Szeliski, Chapter 10 (through 10.5)") Announcements Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by email) One-page writeup (from project web page), specifying:» Your team members» Project goals. Be specific.
Announcements Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by email) One-page writeup (from project web page), specifying:» Your team members» Project goals. Be specific.
Today. Stereo (two view) reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography
 reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography") Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Structured Light. Tobias Nöll Thanks to Marc Pollefeys, David Nister and David Lowe
 Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
Image Based Reconstruction II
 Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Recap from Previous Lecture
 Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
There are many cues in monocular vision which suggests that vision in stereo starts very early from two similar 2D images. Lets see a few...
 STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
What have we leaned so far?
 What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
Stereo. Many slides adapted from Steve Seitz
 Stereo Many slides adapted from Steve Seitz Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image image 1 image 2 Dense depth map Binocular stereo Given a calibrated
Stereo Many slides adapted from Steve Seitz Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image image 1 image 2 Dense depth map Binocular stereo Given a calibrated
Structured Light 3D Scanning in the Presence of Global Illumination
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Structured Light 3D Scanning in the Presence of Global Illumination Gupta, M.; Agrawal, A.; Veeraraghavan, A.; Narasimhan, S. TR2011-036 June
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Structured Light 3D Scanning in the Presence of Global Illumination Gupta, M.; Agrawal, A.; Veeraraghavan, A.; Narasimhan, S. TR2011-036 June
Two-view geometry Computer Vision Spring 2018, Lecture 10
 Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
3D Computer Vision. Structured Light I. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light I Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light I Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
More computational light transport
 More computational light transport http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 23 Course announcements Sign-up for final project checkpoint
More computational light transport http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 23 Course announcements Sign-up for final project checkpoint
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
Structured Light II. Guido Gerig CS 6320, Spring (thanks: slides Prof. S. Narasimhan, CMU, Marc Pollefeys, UNC)
") Structured Light II Guido Gerig CS 6320, Spring 2013 (thanks: slides Prof. S. Narasimhan, CMU, Marc Pollefeys, UNC) http://www.cs.cmu.edu/afs/cs/academic/class/15385- s06/lectures/ppts/lec-17.ppt Variant
Structured Light II Guido Gerig CS 6320, Spring 2013 (thanks: slides Prof. S. Narasimhan, CMU, Marc Pollefeys, UNC) http://www.cs.cmu.edu/afs/cs/academic/class/15385- s06/lectures/ppts/lec-17.ppt Variant
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1)
 (New book: 7.2.1, old book: 11.1)") Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Lecture 9 & 10: Stereo Vision
 Lecture 9 & 10: Stereo Vision Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? IntroducEon to stereo vision Epipolar geometry: a gentle intro Parallel images Image receficaeon Solving
Lecture 9 & 10: Stereo Vision Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? IntroducEon to stereo vision Epipolar geometry: a gentle intro Parallel images Image receficaeon Solving
3D object recognition used by team robotto
 3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
EECS 442 Computer vision. Stereo systems. Stereo vision Rectification Correspondence problem Active stereo vision systems
 EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
3D Scanning. Qixing Huang Feb. 9 th Slide Credit: Yasutaka Furukawa
 3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
Lecture 14: Computer Vision
 CS/b: Artificial Intelligence II Prof. Olga Veksler Lecture : Computer Vision D shape from Images Stereo Reconstruction Many Slides are from Steve Seitz (UW), S. Narasimhan Outline Cues for D shape perception
CS/b: Artificial Intelligence II Prof. Olga Veksler Lecture : Computer Vision D shape from Images Stereo Reconstruction Many Slides are from Steve Seitz (UW), S. Narasimhan Outline Cues for D shape perception
Lecture 6 Stereo Systems Multi-view geometry
 Lecture 6 Stereo Systems Multi-view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-5-Feb-4 Lecture 6 Stereo Systems Multi-view geometry Stereo systems
Lecture 6 Stereo Systems Multi-view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-5-Feb-4 Lecture 6 Stereo Systems Multi-view geometry Stereo systems
Rectification and Disparity
 Rectification and Disparity Nassir Navab Slides prepared by Christian Unger What is Stereo Vision? Introduction A technique aimed at inferring dense depth measurements efficiently using two cameras. Wide
Rectification and Disparity Nassir Navab Slides prepared by Christian Unger What is Stereo Vision? Introduction A technique aimed at inferring dense depth measurements efficiently using two cameras. Wide
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Stereo II CSE 576. Ali Farhadi. Several slides from Larry Zitnick and Steve Seitz
 Stereo II CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Camera parameters A camera is described by several parameters Translation T of the optical center from the origin of world
Stereo II CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Camera parameters A camera is described by several parameters Translation T of the optical center from the origin of world
ENGN D Photography / Spring 2018 / SYLLABUS
 ENGN 2502 3D Photography / Spring 2018 / SYLLABUS Description of the proposed course Over the last decade digital photography has entered the mainstream with inexpensive, miniaturized cameras routinely
ENGN 2502 3D Photography / Spring 2018 / SYLLABUS Description of the proposed course Over the last decade digital photography has entered the mainstream with inexpensive, miniaturized cameras routinely
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision
 Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Lecture'9'&'10:'' Stereo'Vision'
 Lecture'9'&'10:'' Stereo'Vision' Dr.'Juan'Carlos'Niebles' Stanford'AI'Lab' ' Professor'FeiAFei'Li' Stanford'Vision'Lab' 1' Dimensionality'ReducIon'Machine'(3D'to'2D)' 3D world 2D image Point of observation
Lecture'9'&'10:'' Stereo'Vision' Dr.'Juan'Carlos'Niebles' Stanford'AI'Lab' ' Professor'FeiAFei'Li' Stanford'Vision'Lab' 1' Dimensionality'ReducIon'Machine'(3D'to'2D)' 3D world 2D image Point of observation
Lecture 19: Depth Cameras. Visual Computing Systems CMU , Fall 2013
 Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Correspondence and Stereopsis. Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri]
![Correspondence and Stereopsis. Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri]](/thumbs/80/81283374.jpg "Correspondence and Stereopsis. Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri]") Correspondence and Stereopsis Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri] Introduction Disparity: Informally: difference between two pictures Allows us to gain a strong
Correspondence and Stereopsis Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri] Introduction Disparity: Informally: difference between two pictures Allows us to gain a strong
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Geometric camera models and calibration
 Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Image correspondences and structure from motion
 Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
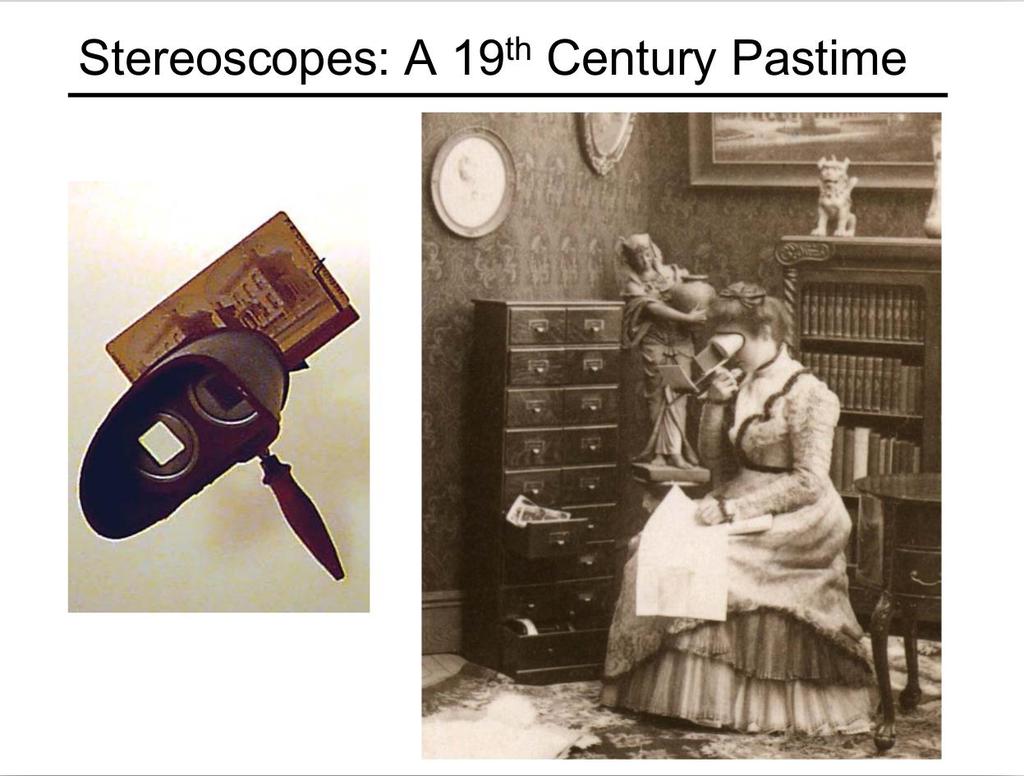
Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923
 Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923 Teesta suspension bridge-darjeeling, India Mark Twain at Pool Table", no date, UCR Museum of Photography Woman getting eye exam during
Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923 Teesta suspension bridge-darjeeling, India Mark Twain at Pool Table", no date, UCR Museum of Photography Woman getting eye exam during
Lecture 14: Basic Multi-View Geometry
 Lecture 14: Basic Multi-View Geometry Stereo If I needed to find out how far point is away from me, I could use triangulation and two views scene point image plane optical center (Graphic from Khurram
Lecture 14: Basic Multi-View Geometry Stereo If I needed to find out how far point is away from me, I could use triangulation and two views scene point image plane optical center (Graphic from Khurram
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Final project bits and pieces
 Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
3D Photography: Active Ranging, Structured Light, ICP
 3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
Chaplin, Modern Times, 1936
 Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
CONTENTS. High-Accuracy Stereo Depth Maps Using Structured Light. Yeojin Yoon
 [Paper Seminar 7] CVPR2003, Vol.1, pp.195-202 High-Accuracy Stereo Depth Maps Using Structured Light Daniel Scharstein Middlebury College Richard Szeliski Microsoft Research 2012. 05. 30. Yeojin Yoon Introduction
[Paper Seminar 7] CVPR2003, Vol.1, pp.195-202 High-Accuracy Stereo Depth Maps Using Structured Light Daniel Scharstein Middlebury College Richard Szeliski Microsoft Research 2012. 05. 30. Yeojin Yoon Introduction
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Stereo Vision 2 Inferring 3D from 2D Model based pose estimation single (calibrated) camera > Can
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Stereo Vision 2 Inferring 3D from 2D Model based pose estimation single (calibrated) camera > Can
3D Photography: Stereo
 3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
A virtual tour of free viewpoint rendering
 A virtual tour of free viewpoint rendering Cédric Verleysen ICTEAM institute, Université catholique de Louvain, Belgium cedric.verleysen@uclouvain.be Organization of the presentation Context Acquisition
A virtual tour of free viewpoint rendering Cédric Verleysen ICTEAM institute, Université catholique de Louvain, Belgium cedric.verleysen@uclouvain.be Organization of the presentation Context Acquisition
Overview of Active Vision Techniques
 SIGGRAPH 99 Course on 3D Photography Overview of Active Vision Techniques Brian Curless University of Washington Overview Introduction Active vision techniques Imaging radar Triangulation Moire Active
SIGGRAPH 99 Course on 3D Photography Overview of Active Vision Techniques Brian Curless University of Washington Overview Introduction Active vision techniques Imaging radar Triangulation Moire Active
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Rectification. Dr. Gerhard Roth
 Rectification Dr. Gerhard Roth Problem Definition Given a pair of stereo images, the intrinsic parameters of each camera, and the extrinsic parameters of the system, R, and, compute the image transformation
Rectification Dr. Gerhard Roth Problem Definition Given a pair of stereo images, the intrinsic parameters of each camera, and the extrinsic parameters of the system, R, and, compute the image transformation
ENGN 2911 I: 3D Photography and Geometry Processing Assignment 2: Structured Light for 3D Scanning
 ENGN 2911 I: 3D Photography and Geometry Processing Assignment 2: Structured Light for 3D Scanning Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 26 February 2009 Figure 1: Structured
ENGN 2911 I: 3D Photography and Geometry Processing Assignment 2: Structured Light for 3D Scanning Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 26 February 2009 Figure 1: Structured
Epipolar Geometry and Stereo Vision
 CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Step-by-Step Model Buidling
 Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
12/3/2009. What is Computer Vision? Applications. Application: Assisted driving Pedestrian and car detection. Application: Improving online search
 Introduction to Artificial Intelligence V22.0472-001 Fall 2009 Lecture 26: Computer Vision Rob Fergus Dept of Computer Science, Courant Institute, NYU Slides from Andrew Zisserman What is Computer Vision?
Introduction to Artificial Intelligence V22.0472-001 Fall 2009 Lecture 26: Computer Vision Rob Fergus Dept of Computer Science, Courant Institute, NYU Slides from Andrew Zisserman What is Computer Vision?
Recap: Features and filters. Recap: Grouping & fitting. Now: Multiple views 10/29/2008. Epipolar geometry & stereo vision. Why multiple views?
 Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Camera Calibration. Schedule. Jesus J Caban. Note: You have until next Monday to let me know. ! Today:! Camera calibration
 Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
3D photography. Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/5/15
 3D photography Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/5/15 with slides by Szymon Rusinkiewicz, Richard Szeliski, Steve Seitz and Brian Curless Announcements Project #3 is due on 5/20.
3D photography Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/5/15 with slides by Szymon Rusinkiewicz, Richard Szeliski, Steve Seitz and Brian Curless Announcements Project #3 is due on 5/20.
Cameras and Stereo CSE 455. Linda Shapiro
 Cameras and Stereo CSE 455 Linda Shapiro 1 Müller-Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html What do you know about perspective projection? Vertical lines? Other lines? 2 Image formation
Cameras and Stereo CSE 455 Linda Shapiro 1 Müller-Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html What do you know about perspective projection? Vertical lines? Other lines? 2 Image formation
Depth. Common Classification Tasks. Example: AlexNet. Another Example: Inception. Another Example: Inception. Depth
 Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
1 Projective Geometry
 CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
Three-Dimensional Sensors Lecture 2: Projected-Light Depth Cameras
 Three-Dimensional Sensors Lecture 2: Projected-Light Depth Cameras Radu Horaud INRIA Grenoble Rhone-Alpes, France Radu.Horaud@inria.fr http://perception.inrialpes.fr/ Outline The geometry of active stereo.
Three-Dimensional Sensors Lecture 2: Projected-Light Depth Cameras Radu Horaud INRIA Grenoble Rhone-Alpes, France Radu.Horaud@inria.fr http://perception.inrialpes.fr/ Outline The geometry of active stereo.
Epipolar Geometry Prof. D. Stricker. With slides from A. Zisserman, S. Lazebnik, Seitz
 Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
Light transport matrices
 Light transport matrices http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 18 Course announcements Homework 5 has been posted. - Due on Friday
Light transport matrices http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 18 Course announcements Homework 5 has been posted. - Due on Friday
Computer Vision. Exercise Session 6 Stereo matching. Institute of Visual Computing
 Computer Vision Exercise Session 6 Stereo matching Assignment 6 3 Tasks: Disparity computation Winner-takes-all Graph-cut Textured 3D model Stereo Setup Bring two views to standard stereo setup Epipoles
Computer Vision Exercise Session 6 Stereo matching Assignment 6 3 Tasks: Disparity computation Winner-takes-all Graph-cut Textured 3D model Stereo Setup Bring two views to standard stereo setup Epipoles
Stereo. Outline. Multiple views 3/29/2017. Thurs Mar 30 Kristen Grauman UT Austin. Multi-view geometry, matching, invariant features, stereo vision
 Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Lecture 6 Stereo Systems Multi- view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-24-Jan-15
 Lecture 6 Stereo Systems Multi- view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-24-Jan-15 Lecture 6 Stereo Systems Multi- view geometry Stereo systems
Lecture 6 Stereo Systems Multi- view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-24-Jan-15 Lecture 6 Stereo Systems Multi- view geometry Stereo systems
Rectification and Distortion Correction
 Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
Computer Vision I. Announcements. Random Dot Stereograms. Stereo III. CSE252A Lecture 16
 Announcements Stereo III CSE252A Lecture 16 HW1 being returned HW3 assigned and due date extended until 11/27/12 No office hours today No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in
Announcements Stereo III CSE252A Lecture 16 HW1 being returned HW3 assigned and due date extended until 11/27/12 No office hours today No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Light Transport CS434. Daniel G. Aliaga Department of Computer Science Purdue University
 Light Transport CS434 Daniel G. Aliaga Department of Computer Science Purdue University Topics Local and Global Illumination Models Helmholtz Reciprocity Dual Photography/Light Transport (in Real-World)
Light Transport CS434 Daniel G. Aliaga Department of Computer Science Purdue University Topics Local and Global Illumination Models Helmholtz Reciprocity Dual Photography/Light Transport (in Real-World)
Optical Active 3D Scanning. Gianpaolo Palma
 Optical Active 3D Scanning Gianpaolo Palma 3D Scanning Taxonomy SHAPE ACQUISTION CONTACT NO-CONTACT NO DESTRUCTIVE DESTRUCTIVE X-RAY MAGNETIC OPTICAL ACOUSTIC CMM ROBOTIC GANTRY SLICING ACTIVE PASSIVE
Optical Active 3D Scanning Gianpaolo Palma 3D Scanning Taxonomy SHAPE ACQUISTION CONTACT NO-CONTACT NO DESTRUCTIVE DESTRUCTIVE X-RAY MAGNETIC OPTICAL ACOUSTIC CMM ROBOTIC GANTRY SLICING ACTIVE PASSIVE
Estimating the surface normal of artwork using a DLP projector
 Estimating the surface normal of artwork using a DLP projector KOICHI TAKASE 1 AND ROY S. BERNS 2 1 TOPPAN Printing co., ltd. 2 Munsell Color Science Laboratory, Rochester Institute of Technology Summary:
Estimating the surface normal of artwork using a DLP projector KOICHI TAKASE 1 AND ROY S. BERNS 2 1 TOPPAN Printing co., ltd. 2 Munsell Color Science Laboratory, Rochester Institute of Technology Summary:
Stereo Vision A simple system. Dr. Gerhard Roth Winter 2012
 Stereo Vision A simple system Dr. Gerhard Roth Winter 2012 Stereo Stereo Ability to infer information on the 3-D structure and distance of a scene from two or more images taken from different viewpoints
Stereo Vision A simple system Dr. Gerhard Roth Winter 2012 Stereo Stereo Ability to infer information on the 3-D structure and distance of a scene from two or more images taken from different viewpoints
Surround Structured Lighting for Full Object Scanning
 Surround Structured Lighting for Full Object Scanning Douglas Lanman, Daniel Crispell, and Gabriel Taubin Brown University, Dept. of Engineering August 21, 2007 1 Outline Introduction and Related Work
Surround Structured Lighting for Full Object Scanning Douglas Lanman, Daniel Crispell, and Gabriel Taubin Brown University, Dept. of Engineering August 21, 2007 1 Outline Introduction and Related Work
3D Computer Vision. Depth Cameras. Prof. Didier Stricker. Oliver Wasenmüller
 3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
CS 2770: Intro to Computer Vision. Multiple Views. Prof. Adriana Kovashka University of Pittsburgh March 14, 2017
 CS 277: Intro to Computer Vision Multiple Views Prof. Adriana Kovashka Universit of Pittsburgh March 4, 27 Plan for toda Affine and projective image transformations Homographies and image mosaics Stereo
CS 277: Intro to Computer Vision Multiple Views Prof. Adriana Kovashka Universit of Pittsburgh March 4, 27 Plan for toda Affine and projective image transformations Homographies and image mosaics Stereo
Flexible Calibration of a Portable Structured Light System through Surface Plane
 Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
The main problem of photogrammetry
 Structured Light Structured Light The main problem of photogrammetry to recover shape from multiple views of a scene, we need to find correspondences between the images the matching/correspondence problem
Structured Light Structured Light The main problem of photogrammetry to recover shape from multiple views of a scene, we need to find correspondences between the images the matching/correspondence problem
Image warping and stitching
 Image warping and stitching May 5 th, 2015 Yong Jae Lee UC Davis PS2 due next Friday Announcements 2 Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 3 Alignment
Image warping and stitching May 5 th, 2015 Yong Jae Lee UC Davis PS2 due next Friday Announcements 2 Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 3 Alignment
3D Shape and Indirect Appearance By Structured Light Transport
 3D Shape and Indirect Appearance By Structured Light Transport CVPR 2014 - Best paper honorable mention Matthew O Toole, John Mather, Kiriakos N. Kutulakos Department of Computer Science University of
3D Shape and Indirect Appearance By Structured Light Transport CVPR 2014 - Best paper honorable mention Matthew O Toole, John Mather, Kiriakos N. Kutulakos Department of Computer Science University of
CS 231A: Computer Vision (Winter 2018) Problem Set 2
 Problem Set 2") CS 231A: Computer Vision (Winter 2018) Problem Set 2 Due Date: Feb 09 2018, 11:59pm Note: In this PS, using python2 is recommended, as the data files are dumped with python2. Using python3 might cause
CS 231A: Computer Vision (Winter 2018) Problem Set 2 Due Date: Feb 09 2018, 11:59pm Note: In this PS, using python2 is recommended, as the data files are dumped with python2. Using python3 might cause
Lecture 10: Multi-view geometry
 Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Image warping , , Computational Photography Fall 2017, Lecture 10
 Image warping http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 10 Course announcements Second make-up lecture on Friday, October 6 th, noon-1:30
Image warping http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 10 Course announcements Second make-up lecture on Friday, October 6 th, noon-1:30
Reminder: Lecture 20: The Eight-Point Algorithm. Essential/Fundamental Matrix. E/F Matrix Summary. Computing F. Computing F from Point Matches
 Reminder: Lecture 20: The Eight-Point Algorithm F = -0.00310695-0.0025646 2.96584-0.028094-0.00771621 56.3813 13.1905-29.2007-9999.79 Readings T&V 7.3 and 7.4 Essential/Fundamental Matrix E/F Matrix Summary
Reminder: Lecture 20: The Eight-Point Algorithm F = -0.00310695-0.0025646 2.96584-0.028094-0.00771621 56.3813 13.1905-29.2007-9999.79 Readings T&V 7.3 and 7.4 Essential/Fundamental Matrix E/F Matrix Summary