Current Research at AASS Learning Systems Lab
|
|
|
- Domenic Harmon
- 5 years ago
- Views:
Transcription
1 Current Research at AASS Learning Systems Lab Achim Lilienthal, Tom Duckett, Henrik Andreasson, Grzegorz Cielniak, Li Jun, Martin Magnusson, Martin Persson, Alexander Skoglund, Christoffer Wahlgren Örebro University


")
 5) Topological")
 6) Dynamic")
 Acquiring Realistic 3D")
2 Contents 1) Robotic Platform A. Robotic Map Learning 2) SLAM (Tom Duckett with Udo Frese) 3) Semi-Autonomous Mapping (Martin Persson) 4) 3D Mapping (Martin Magnusson) 5) Topological Mapping (Christoffer Wahlgren) 6) Dynamic Mapping (with Peter Biber) 7) Acquiring Realistic 3D Models of Buildings (with Peter Biber)

3 1 Robotic Platform PeopleBot 2D Laserscanner Omnicam Thermal Camera Monocular Camera Gripper
4 1 Robotic Platform
5 1 Robotic Platform
 SLAM (Tom Duckett with Udo Frese) 3) Semi-Autonomous")
 6) Dynamic Mapping (with Peter Biber) 7)")
6 Contents 1) Robotic Platform A. Robotic Map Learning 2) SLAM (Tom Duckett with Udo Frese) 3) Semi-Autonomous Mapping (Martin Persson) 4) 3D Mapping (Martin Magnusson) 5) Topological Mapping (Christoffer Wahlgren) 6) Dynamic Mapping (with Peter Biber) 7) Acquiring Realistic 3D Models of Buildings (with Peter Biber)
7
 SLAM (Tom Duckett with Udo Frese) 3) Semi-Autonomous")
 6) Dynamic Mapping (with Peter Biber) 7)")
8 Contents 1) Robotic Platform A. Robotic Map Learning 2) SLAM (Tom Duckett with Udo Frese) 3) Semi-Autonomous Mapping (Martin Persson) 4) 3D Mapping (Martin Magnusson) 5) Topological Mapping (Christoffer Wahlgren) 6) Dynamic Mapping (with Peter Biber) 7) Acquiring Realistic 3D Models of Buildings (with Peter Biber)

9 4 3D Mapping 3D Scan Registration (Martin Magnusson)


10 4 3D Mapping 3D Scan Registration Autonomous Mining Vehicles Project Partners Atlas Copco Rock Drills Optab Optronikinnovation AB Robotdalen


11 4 3D Mapping Experimental Setup 40 cm 7 m

12 4 3D Mapping 3D-ICP pair corresponding (= closest) points Calculate the transformation that minimises the total distance between corresponding points repeat

13 4 3D Mapping 3D-NDT point cloud probability function minimise total distance repeat
 SLAM (Tom Duckett with Udo Frese) 3) Semi-Autonomous")
 6) Dynamic Mapping (with Peter Biber) 7)")
14 Contents 1) Robotic Platform A. Robotic Map Learning 2) SLAM (Tom Duckett with Udo Frese) 3) Semi-Autonomous Mapping (Martin Persson) 4) 3D Mapping (Martin Magnusson) 5) Topological Mapping (Christoffer Wahlgren) 6) Dynamic Mapping (with Peter Biber) 7) Acquiring Realistic 3D Models of Buildings (with Peter Biber)

15 5 Topological Map Building from Omnivision Appearance-based Approach (Omnicam)
16 5 Topological Map Building from Omnivision matching local features (SIFT) grey level image find interest points (corners or patterns) calculate gradient direction and magnitude (32x32 window) histogram of directions and magnitudes (16x8 bins) keypoint descriptor (vector of length 128)

17 5 Topological Map Building from Omnivision Feature Matching (relative match criterion)

18 5 Topological Map Building from Omnivision Results
 SLAM (Tom Duckett with")
 4) 3D Mapping (Martin Magnusson) 5)")
 7) Acquiring")
19 Contents 1) Robotic Platform A. Robotic Map Learning 2) SLAM (Tom Duckett with Udo Frese) 3) Semi-Autonomous Mapping (Martin Persson) 4) 3D Mapping (Martin Magnusson) 5) Topological Mapping (Christoffer Wahlgren) 6) Dynamic Mapping (with Peter Biber) 7) Acquiring Realistic 3D Models of Buildings
20 6 Dynamic Mapping Remaining Challenges for Mapping and Localisation long-term operation moving people, temporary objects, rearranged furniture large and dynamic environments living together with people Consequences for M&L Algorithms coping with dynamic environments continuous and lifelong learning
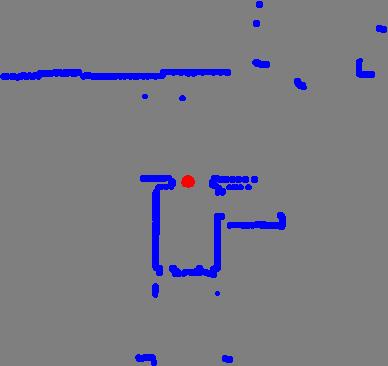
21 6 Dynamic Mapping Simple Learn Once Map only one entry: distance is d d d d dynamic map should represent both distances t
22 6 Dynamic Mapping Suggested Solution: Dynamic Map sample-based representation interpretation by robust statistics (median, MAD) updating the dynamic map by replacing samples mean sample lifetime λ maintain map at several time-scales (5 scales) Stability Plasticity λ λ λ λ λ



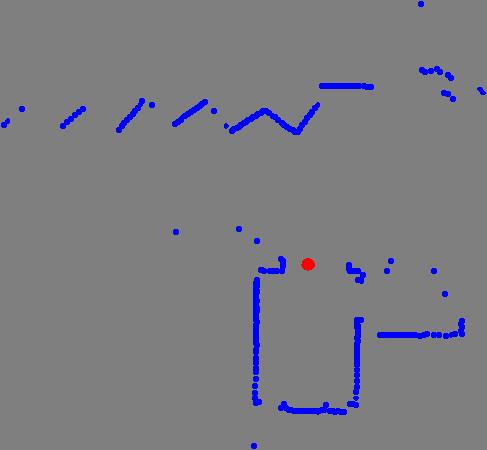

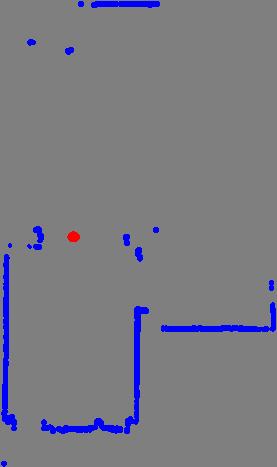




23 6 Dynamic Mapping Stability Plasticity Oct 25 Oct 26 Oct 29
 SLAM (Tom Duckett with Udo Frese) 3)")
 Topological Mapping (Christoffer Wahlgren) 6) Dynamic Mapping (with")
24 Contents 1) Robotic Platform A. Robotic Map Learning 2) SLAM (Tom Duckett with Udo Frese) 3) Semi-Autonomous Mapping (Martin Persson) 4) 3D Mapping (Martin Magnusson) 5) Topological Mapping (Christoffer Wahlgren) 6) Dynamic Mapping (with Peter Biber) 7) Acquiring Realistic 3D Models of Buildings


25 7 Acquiring Realistic 3D Models of Buildings Joint work with Peter Biber 2D map from laser scans 3D model from 2D laser map texture added by multi-resolution blending

26 7 Acquiring Realistic 3D Models of Buildings

27 7 Acquiring Realistic 3D Models of Buildings
 Reinforcement Learning for Time-Optimal Control (with Tomás Martinéz-Marín) 9)")
 Vision-Based Recognition of Places (Henrik")
28 Contents B. Learning Control 8) Reinforcement Learning for Time-Optimal Control (with Tomás Martinéz-Marín) 9) Task-Non-Specific Learning of New Skills 10) Teaching by Demonstration (Alexander Skoglund) C. Recognition Systems for Autonomous Robots 11) Vision-Based Recognition of Places (Henrik Andreasson) 12) Detection and Tracking of Multiple Persons (Grzegorz Cielniak) D. Mobile Robot Olfaction
29 8 RL for Time-Optimal Control Visual Servoing and RL (with Tomás Martinéz-Marín) full screen full screen
 Reinforcement Learning for Time-Optimal Control (with Tomás Martinéz-Marín) 9) Task-Non-Specific Learning of New Skills (Li Jun) 10) Teaching by Demonstration (Alexander")
30 Contents B. Learning Control 8) Reinforcement Learning for Time-Optimal Control (with Tomás Martinéz-Marín) 9) Task-Non-Specific Learning of New Skills (Li Jun) 10) Teaching by Demonstration (Alexander Skoglund) C. Recognition Systems for Autonomous Robots 11) Vision-Based Recognition of Places 12) Detection and Tracking of Multiple Persons (Grzegorz Cielniak) D. Mobile Robot Olfaction
31 12 Person Detection and Tracking Multiperson Tracking full screen
 t = ( p, v) = ( x, y,")
 full screen full screen")
32 12 Person Detection and Tracking Ellipse Model State x ( i) t = ( p, v) = ( x, y, w, h, d, v Dynamic model: random walk x, v y, v w, v h ) full screen full screen
33 12 Person Detection and Tracking Tracking and Following Persons Combined with Face Tracking full screen
34 Current Research at AASS Learning Systems Lab Tom Duckett, Achim Lilienthal Thank you! Örebro University

35 Current Research at AASS Learning Systems Lab Örebro University
AASS, Örebro University
 Henrik Andreasson, Abdelbaki Bouguerra, Marcello Mobile Cirillo, Robotics Dimitar Dimitrov, and Olfaction Dimiter Driankov, Lab, Martin Magnusson, Federico Pecora, and Achim J. Lilienthal AASS, Örebro
Henrik Andreasson, Abdelbaki Bouguerra, Marcello Mobile Cirillo, Robotics Dimitar Dimitrov, and Olfaction Dimiter Driankov, Lab, Martin Magnusson, Federico Pecora, and Achim J. Lilienthal AASS, Örebro
Has Something Changed Here? Autonomous Difference Detection for Security Patrol Robots
 Has Something Changed Here? Autonomous Difference Detection for Security Patrol Robots Henrik Andreasson, Martin Magnusson and Achim Lilienthal Centre of Applied Autonomous Sensor Systems, Dept. of Technology,
Has Something Changed Here? Autonomous Difference Detection for Security Patrol Robots Henrik Andreasson, Martin Magnusson and Achim Lilienthal Centre of Applied Autonomous Sensor Systems, Dept. of Technology,
Vision Aided 3D Laser Scanner Based Registration
 1 Vision Aided 3D Laser Scanner Based Registration Henrik Andreasson Achim Lilienthal Centre of Applied Autonomous Sensor Systems, Dept. of Technology, Örebro University, Sweden Abstract This paper describes
1 Vision Aided 3D Laser Scanner Based Registration Henrik Andreasson Achim Lilienthal Centre of Applied Autonomous Sensor Systems, Dept. of Technology, Örebro University, Sweden Abstract This paper describes
Automatic Appearance-Based Loop Detection from Three-Dimensional Laser Data Using the Normal Distributions Transform
 Automatic Appearance-Based Loop Detection from Three-Dimensional Laser Data Using the Normal Distributions Transform Martin Magnusson and Henrik Andreasson Center for Applied Autonomous Sensor Systems
Automatic Appearance-Based Loop Detection from Three-Dimensional Laser Data Using the Normal Distributions Transform Martin Magnusson and Henrik Andreasson Center for Applied Autonomous Sensor Systems
Mobile Robotics contact: and Olfaction Lab,
 Prof. Achim J. Lilienthal Mobile Robotics contact: and Olfaction Lab, www.aass.oru.se/~lilien AASS, Örebro achim.lilienthal@oru.se University 1 Prof. Achim J. Lilienthal Mobile Robotics contact: and Olfaction
Prof. Achim J. Lilienthal Mobile Robotics contact: and Olfaction Lab, www.aass.oru.se/~lilien AASS, Örebro achim.lilienthal@oru.se University 1 Prof. Achim J. Lilienthal Mobile Robotics contact: and Olfaction
Intra-Logistics with Integrated Automatic Deployment: Safe and Scalable Fleets in Shared Spaces
 Intra-Logistics with Integrated Automatic Deployment: Safe and Scalable Fleets in Shared Spaces H2020-ICT-2016-2017 Grant agreement no: 732737 DELIVERABLE 1.2 Precise localisation and mapping in dynamic
Intra-Logistics with Integrated Automatic Deployment: Safe and Scalable Fleets in Shared Spaces H2020-ICT-2016-2017 Grant agreement no: 732737 DELIVERABLE 1.2 Precise localisation and mapping in dynamic
Normal Distribution Transform with Point Projection for 3D Point Cloud Registration
 Normal Distribution Transform with Point Projection for 3D Point Cloud Registration Mouna Attia Université de Tunis El Manar Faculté des Sciences de Tunis Labotory: URAPOP 2092, Tunis, Tunisie Email: mounaattia.info@gmail.com
Normal Distribution Transform with Point Projection for 3D Point Cloud Registration Mouna Attia Université de Tunis El Manar Faculté des Sciences de Tunis Labotory: URAPOP 2092, Tunis, Tunisie Email: mounaattia.info@gmail.com
Evaluation of 3D Registration Reliability and Speed A Comparison of ICP and NDT
 Evaluation of 3D Registration Reliability and Speed A Comparison of ICP and NDT Martin Magnusson, Andreas Nüchter, Christopher Lörken, Achim J. Lilienthal, and Joachim Hertzberg Abstract To advance robotic
Evaluation of 3D Registration Reliability and Speed A Comparison of ICP and NDT Martin Magnusson, Andreas Nüchter, Christopher Lörken, Achim J. Lilienthal, and Joachim Hertzberg Abstract To advance robotic
3D Scan Matching for Mobile Robots with Application to Mine Mapping
 Licentiate Thesis 3D Scan Matching for Mobile Robots with Application to Mine Mapping Martin Magnusson Technology Studies from the Department of Technology at Örebro University 17 örebro 2006 3D Scan
Licentiate Thesis 3D Scan Matching for Mobile Robots with Application to Mine Mapping Martin Magnusson Technology Studies from the Department of Technology at Örebro University 17 örebro 2006 3D Scan
Mini-SLAM: Minimalistic Visual SLAM in Large-Scale Environments Based on a New Interpretation of Image Similarity
 Mini-SLAM: Minimalistic Visual SLAM in Large-Scale Environments Based on a New Interpretation of Image Similarity Henrik Andreasson, Tom Duckett and Achim Lilienthal Applied Autonomous Sensor Systems Örebro
Mini-SLAM: Minimalistic Visual SLAM in Large-Scale Environments Based on a New Interpretation of Image Similarity Henrik Andreasson, Tom Duckett and Achim Lilienthal Applied Autonomous Sensor Systems Örebro
3D Modelling for Underground Mining Vehicles
 3D Modelling for Underground Mining Vehicles Martin Magnusson Rolf Elsrud Lars-Erik Skagerlund Tom Duckett Örebro University Atlas Copco Rock Drills Optab Örebro University martin.magnusson@tech.oru.se
3D Modelling for Underground Mining Vehicles Martin Magnusson Rolf Elsrud Lars-Erik Skagerlund Tom Duckett Örebro University Atlas Copco Rock Drills Optab Örebro University martin.magnusson@tech.oru.se
Learning to Close the Loop from 3D Point Clouds
 Learning to Close the Loop from 3D Point Clouds Karl Granström and Thomas B. Schön Div. of Automatic Control, Dept. of Electrical Engineering Linköping University, Sweden {karl, schon}@isy.liu.se Abstract
Learning to Close the Loop from 3D Point Clouds Karl Granström and Thomas B. Schön Div. of Automatic Control, Dept. of Electrical Engineering Linköping University, Sweden {karl, schon}@isy.liu.se Abstract
Simultaneous Localization and Mapping (SLAM)
") Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
Achim J. Lilienthal Mobile Robotics and Olfaction Lab, AASS, Örebro University
 Achim J. Lilienthal Mobile Robotics and Olfaction Lab, Room T1227, Mo, 11-12 o'clock AASS, Örebro University (please drop me an email in advance) achim.lilienthal@oru.se 1 4. Admin Course Plan Rafael C.
Achim J. Lilienthal Mobile Robotics and Olfaction Lab, Room T1227, Mo, 11-12 o'clock AASS, Örebro University (please drop me an email in advance) achim.lilienthal@oru.se 1 4. Admin Course Plan Rafael C.
Multi Channel Generalized-ICP
 Multi Channel Generalized-ICP James Servos and Steven L. Waslander University of Waterloo, Waterloo, ON, Canada, N2L 3G1 Abstract Current state of the art scan registration algorithms which use only positional
Multi Channel Generalized-ICP James Servos and Steven L. Waslander University of Waterloo, Waterloo, ON, Canada, N2L 3G1 Abstract Current state of the art scan registration algorithms which use only positional
Linköping University Post Print. Learning to Close the Loop from 3D Point Clouds
 Linköping University Post Print Learning to Close the Loop from 3D Point Clouds Karl Granström and Thomas Schön N.B.: When citing this work, cite the original article. 2 IEEE. Personal use of this material
Linköping University Post Print Learning to Close the Loop from 3D Point Clouds Karl Granström and Thomas Schön N.B.: When citing this work, cite the original article. 2 IEEE. Personal use of this material
Preprint.
 http://www.diva-portal.org Preprint This is the submitted version of a paper presented at IEEE international conference on robotics and automation, ICRA 2008, Pasadena, CA, USA, 19-23 May 2008. Citation
http://www.diva-portal.org Preprint This is the submitted version of a paper presented at IEEE international conference on robotics and automation, ICRA 2008, Pasadena, CA, USA, 19-23 May 2008. Citation
Simultaneous Localization
 Simultaneous Localization and Mapping (SLAM) RSS Technical Lecture 16 April 9, 2012 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 Navigation Overview Where am I? Where am I going? Localization Assumed
Simultaneous Localization and Mapping (SLAM) RSS Technical Lecture 16 April 9, 2012 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 Navigation Overview Where am I? Where am I going? Localization Assumed
Comparative Evaluation of Range Sensor Accuracy in Indoor Environments
 Comparative Evaluation of Range Sensor Accuracy in Indoor Environments Todor Stoyanov, Athanasia Louloudi, Henrik Andreasson and Achim J. Lilienthal Center of Applied Autonomous Sensor Systems (AASS),
Comparative Evaluation of Range Sensor Accuracy in Indoor Environments Todor Stoyanov, Athanasia Louloudi, Henrik Andreasson and Achim J. Lilienthal Center of Applied Autonomous Sensor Systems (AASS),
Collecting outdoor datasets for benchmarking vision based robot localization
 Collecting outdoor datasets for benchmarking vision based robot localization Emanuele Frontoni*, Andrea Ascani, Adriano Mancini, Primo Zingaretti Department of Ingegneria Infromatica, Gestionale e dell
Collecting outdoor datasets for benchmarking vision based robot localization Emanuele Frontoni*, Andrea Ascani, Adriano Mancini, Primo Zingaretti Department of Ingegneria Infromatica, Gestionale e dell
Using RGB Information to Improve NDT Distribution Generation and Registration Convergence
 Using RGB Information to Improve NDT Distribution Generation and Registration Convergence James Servos and Steven L. Waslander University of Waterloo, Waterloo, ON, Canada, N2L 3G1 Abstract Unmanned vehicles
Using RGB Information to Improve NDT Distribution Generation and Registration Convergence James Servos and Steven L. Waslander University of Waterloo, Waterloo, ON, Canada, N2L 3G1 Abstract Unmanned vehicles
Eppur si muove ( And yet it moves )
") Eppur si muove ( And yet it moves ) - Galileo Galilei University of Texas at Arlington Tracking of Image Features CSE 4392-5369 Vision-based Robot Sensing, Localization and Control Dr. Gian Luca Mariottini,
Eppur si muove ( And yet it moves ) - Galileo Galilei University of Texas at Arlington Tracking of Image Features CSE 4392-5369 Vision-based Robot Sensing, Localization and Control Dr. Gian Luca Mariottini,
Appearance-based Visual Localisation in Outdoor Environments with an Omnidirectional Camera
 52. Internationales Wissenschaftliches Kolloquium Technische Universität Ilmenau 10. - 13. September 2007 M. Schenderlein / K. Debes / A. Koenig / H.-M. Gross Appearance-based Visual Localisation in Outdoor
52. Internationales Wissenschaftliches Kolloquium Technische Universität Ilmenau 10. - 13. September 2007 M. Schenderlein / K. Debes / A. Koenig / H.-M. Gross Appearance-based Visual Localisation in Outdoor
Automatic Generation of Indoor VR-Models by a Mobile Robot with a Laser Range Finder and a Color Camera
 Automatic Generation of Indoor VR-Models by a Mobile Robot with a Laser Range Finder and a Color Camera Christian Weiss and Andreas Zell Universität Tübingen, Wilhelm-Schickard-Institut für Informatik,
Automatic Generation of Indoor VR-Models by a Mobile Robot with a Laser Range Finder and a Color Camera Christian Weiss and Andreas Zell Universität Tübingen, Wilhelm-Schickard-Institut für Informatik,
Fast 3D Mapping in Highly Dynamic Environments using Normal Distributions Transform Occupancy Maps
 Fast 3D Mapping in Highly Dynamic Environments using Normal Distributions Transform Occupancy Maps Jari Saarinen, Todor Stoyanov, Henrik Andreasson and Achim J. Lilienthal Abstract Autonomous vehicles
Fast 3D Mapping in Highly Dynamic Environments using Normal Distributions Transform Occupancy Maps Jari Saarinen, Todor Stoyanov, Henrik Andreasson and Achim J. Lilienthal Abstract Autonomous vehicles
3D Point Cloud Processing
 3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview
 Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Image Matching. AKA: Image registration, the correspondence problem, Tracking,
 Image Matching AKA: Image registration, the correspondence problem, Tracking, What Corresponds to What? Daisy? Daisy From: www.amphian.com Relevant for Analysis of Image Pairs (or more) Also Relevant for
Image Matching AKA: Image registration, the correspondence problem, Tracking, What Corresponds to What? Daisy? Daisy From: www.amphian.com Relevant for Analysis of Image Pairs (or more) Also Relevant for
Removing Moving Objects from Point Cloud Scenes
 Removing Moving Objects from Point Cloud Scenes Krystof Litomisky and Bir Bhanu University of California, Riverside krystof@litomisky.com, bhanu@ee.ucr.edu Abstract. Three-dimensional simultaneous localization
Removing Moving Objects from Point Cloud Scenes Krystof Litomisky and Bir Bhanu University of California, Riverside krystof@litomisky.com, bhanu@ee.ucr.edu Abstract. Three-dimensional simultaneous localization
6D SLAM with Kurt3D. Andreas Nüchter, Kai Lingemann, Joachim Hertzberg
 6D SLAM with Kurt3D Andreas Nüchter, Kai Lingemann, Joachim Hertzberg University of Osnabrück, Institute of Computer Science Knowledge Based Systems Research Group Albrechtstr. 28, D-4969 Osnabrück, Germany
6D SLAM with Kurt3D Andreas Nüchter, Kai Lingemann, Joachim Hertzberg University of Osnabrück, Institute of Computer Science Knowledge Based Systems Research Group Albrechtstr. 28, D-4969 Osnabrück, Germany
ME132 February 3, 2011
 ME132 February 3, 2011 Outline: - active sensors - introduction to lab setup (Player/Stage) - lab assignment - brief overview of OpenCV ME132 February 3, 2011 Outline: - active sensors - introduction to
ME132 February 3, 2011 Outline: - active sensors - introduction to lab setup (Player/Stage) - lab assignment - brief overview of OpenCV ME132 February 3, 2011 Outline: - active sensors - introduction to
Loop detection and extended target tracking using laser data
 Licentiate seminar 1(39) Loop detection and extended target tracking using laser data Karl Granström Division of Automatic Control Department of Electrical Engineering Linköping University Linköping, Sweden
Licentiate seminar 1(39) Loop detection and extended target tracking using laser data Karl Granström Division of Automatic Control Department of Electrical Engineering Linköping University Linköping, Sweden
SIFT, SURF and Seasons: Appearance-based Long-term Localization in Outdoor Environments
 See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/222546832, and Seasons: Appearance-based Long-term Localization in Outdoor Environments Article
See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/222546832, and Seasons: Appearance-based Long-term Localization in Outdoor Environments Article
3D Environment Reconstruction
 3D Environment Reconstruction Using Modified Color ICP Algorithm by Fusion of a Camera and a 3D Laser Range Finder The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15,
3D Environment Reconstruction Using Modified Color ICP Algorithm by Fusion of a Camera and a 3D Laser Range Finder The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15,
Large-Scale. Point Cloud Processing Tutorial. Application: Mobile Mapping
 Large-Scale 3D Point Cloud Processing Tutorial 2013 Application: Mobile Mapping The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well
Large-Scale 3D Point Cloud Processing Tutorial 2013 Application: Mobile Mapping The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well
Appearance-based Tracking of Persons with an Omnidirectional Vision Sensor
 Appearance-based Tracking of Persons with an Omnidirectional Vision Sensor Grzegorz Cielniak 1, Mihajlo Miladinovic 1, Daniel Hammarin 1, Linus Göranson 1, Achim Lilienthal 2 and Tom Duckett 1 1 Dept.
Appearance-based Tracking of Persons with an Omnidirectional Vision Sensor Grzegorz Cielniak 1, Mihajlo Miladinovic 1, Daniel Hammarin 1, Linus Göranson 1, Achim Lilienthal 2 and Tom Duckett 1 1 Dept.
Robot Mapping. SLAM Front-Ends. Cyrill Stachniss. Partial image courtesy: Edwin Olson 1
 Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
On the Accuracy of the 3D Normal Distributions Transform as a Tool for Spatial Representation
 On the Accuracy of the 3D Normal Distributions Transform as a Tool for Spatial Representation Todor Stoyanov, Martin Magnusson, Håkan Almqvist and Achim J. Lilienthal Center of Applied Autonomous Sensor
On the Accuracy of the 3D Normal Distributions Transform as a Tool for Spatial Representation Todor Stoyanov, Martin Magnusson, Håkan Almqvist and Achim J. Lilienthal Center of Applied Autonomous Sensor
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
CS 4495 Computer Vision A. Bobick. CS 4495 Computer Vision. Features 2 SIFT descriptor. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
A Genetic Algorithm for Simultaneous Localization and Mapping
 A Genetic Algorithm for Simultaneous Localization and Mapping Tom Duckett Centre for Applied Autonomous Sensor Systems Dept. of Technology, Örebro University SE-70182 Örebro, Sweden http://www.aass.oru.se
A Genetic Algorithm for Simultaneous Localization and Mapping Tom Duckett Centre for Applied Autonomous Sensor Systems Dept. of Technology, Örebro University SE-70182 Örebro, Sweden http://www.aass.oru.se
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
Normal Distributions Transform Monte-Carlo Localization (NDT-MCL)
") Normal Distributions Transform Monte-Carlo Localization (NDT-MCL) Jari Saarinen, Henrik Andreasson, Todor Stoyanov and Achim J. Lilienthal Abstract Industrial applications often impose hard requirements
Normal Distributions Transform Monte-Carlo Localization (NDT-MCL) Jari Saarinen, Henrik Andreasson, Todor Stoyanov and Achim J. Lilienthal Abstract Industrial applications often impose hard requirements
THE ANNALS OF DUNAREA DE JOS UNIVERSITY OF GALATI FASCICLE III, 2007 ISSN X ELECTROTECHNICS, ELECTRONICS, AUTOMATIC CONTROL, INFORMATICS
 ELECTROTECHNICS, ELECTRONICS, AUTOMATIC CONTROL, INFORMATICS SIFT BASE ALGORITHM FOR POINT FEATURE TRACKING Adrian Burlacu, Cosmin Copot and Corneliu Lazar Gh. Asachi Technical University of Iasi, epartment
ELECTROTECHNICS, ELECTRONICS, AUTOMATIC CONTROL, INFORMATICS SIFT BASE ALGORITHM FOR POINT FEATURE TRACKING Adrian Burlacu, Cosmin Copot and Corneliu Lazar Gh. Asachi Technical University of Iasi, epartment
QUANTITATIVE PERFORMANCE EVALUATION OF A PEOPLE TRACKING SYSTEM ON A MOBILE ROBOT
 QUANTITATIVE PERFORMANCE EVALUATION OF A PEOPLE TRACKING SYSTEM ON A MOBILE ROBOT Grzegorz Cielniak 1, André Treptow 2 and Tom Duckett 1 1 AASS, Department of Technology, University of Örebro, Örebro,
QUANTITATIVE PERFORMANCE EVALUATION OF A PEOPLE TRACKING SYSTEM ON A MOBILE ROBOT Grzegorz Cielniak 1, André Treptow 2 and Tom Duckett 1 1 AASS, Department of Technology, University of Örebro, Örebro,
Learning to close loops from range data
 Learning to close loops from range data Karl Granström, Thomas Schön and Juan I Nieto Linköping University Post Print N.B.: When citing this work, cite the original article. Original Publication: Karl
Learning to close loops from range data Karl Granström, Thomas Schön and Juan I Nieto Linköping University Post Print N.B.: When citing this work, cite the original article. Original Publication: Karl
Image Features: Detection, Description, and Matching and their Applications
 Image Features: Detection, Description, and Matching and their Applications Image Representation: Global Versus Local Features Features/ keypoints/ interset points are interesting locations in the image.
Image Features: Detection, Description, and Matching and their Applications Image Representation: Global Versus Local Features Features/ keypoints/ interset points are interesting locations in the image.
Evaluation of interest point detectors for Visual SLAM
 Evaluation of interest point detectors for Visual SLAM Mónica Ballesta, Arturo Gil, Óscar Reinoso Systems Engineering Department Miguel Hernández University 03202 Elche (Alicante), SPAIN Email: {mballesta,
Evaluation of interest point detectors for Visual SLAM Mónica Ballesta, Arturo Gil, Óscar Reinoso Systems Engineering Department Miguel Hernández University 03202 Elche (Alicante), SPAIN Email: {mballesta,
3D Laserscanner App for Indoor Measurements
 3D Laserscanner App for Indoor Measurements V&R Vision & Robotics GmbH Prof. Dr.-Ing. Dietrich Paulus, Dipl.-Inform. Johannes Pellenz info@vision-robotics.de 20. April 2011 vr 3D Laserscanner App for Indoor
3D Laserscanner App for Indoor Measurements V&R Vision & Robotics GmbH Prof. Dr.-Ing. Dietrich Paulus, Dipl.-Inform. Johannes Pellenz info@vision-robotics.de 20. April 2011 vr 3D Laserscanner App for Indoor
Visual Recognition and Search April 18, 2008 Joo Hyun Kim
 Visual Recognition and Search April 18, 2008 Joo Hyun Kim Introduction Suppose a stranger in downtown with a tour guide book?? Austin, TX 2 Introduction Look at guide What s this? Found Name of place Where
Visual Recognition and Search April 18, 2008 Joo Hyun Kim Introduction Suppose a stranger in downtown with a tour guide book?? Austin, TX 2 Introduction Look at guide What s this? Found Name of place Where
5. Tests and results Scan Matching Optimization Parameters Influence
 126 5. Tests and results This chapter presents results obtained using the proposed method on simulated and real data. First, it is analyzed the scan matching optimization; after that, the Scan Matching
126 5. Tests and results This chapter presents results obtained using the proposed method on simulated and real data. First, it is analyzed the scan matching optimization; after that, the Scan Matching
Ensemble of Bayesian Filters for Loop Closure Detection
 Ensemble of Bayesian Filters for Loop Closure Detection Mohammad Omar Salameh, Azizi Abdullah, Shahnorbanun Sahran Pattern Recognition Research Group Center for Artificial Intelligence Faculty of Information
Ensemble of Bayesian Filters for Loop Closure Detection Mohammad Omar Salameh, Azizi Abdullah, Shahnorbanun Sahran Pattern Recognition Research Group Center for Artificial Intelligence Faculty of Information
PRECEDING VEHICLE TRACKING IN STEREO IMAGES VIA 3D FEATURE MATCHING
 PRECEDING VEHICLE TRACKING IN STEREO IMAGES VIA 3D FEATURE MATCHING Daniel Weingerl, Wilfried Kubinger, Corinna Engelhardt-Nowitzki UAS Technikum Wien: Department for Advanced Engineering Technologies,
PRECEDING VEHICLE TRACKING IN STEREO IMAGES VIA 3D FEATURE MATCHING Daniel Weingerl, Wilfried Kubinger, Corinna Engelhardt-Nowitzki UAS Technikum Wien: Department for Advanced Engineering Technologies,
Features Points. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Feature descriptors and matching
 Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
GeoSLAM Overview. The experts in go-anywhere 3D mobile mapping technology
 GeoSLAM Overview The experts in go-anywhere 3D mobile mapping technology 1 About GeoSLAM The experts in go-anywhere 3D mobile mapping technology 2 Who We Are GeoSLAM is a global market leader in go-anywhere
GeoSLAM Overview The experts in go-anywhere 3D mobile mapping technology 1 About GeoSLAM The experts in go-anywhere 3D mobile mapping technology 2 Who We Are GeoSLAM is a global market leader in go-anywhere
A visual bag of words method for interactive qualitative localization and mapping
 A visual bag of words method for interactive qualitative localization and mapping David FILLIAT ENSTA - 32 boulevard Victor - 7515 PARIS - France Email: david.filliat@ensta.fr Abstract Localization for
A visual bag of words method for interactive qualitative localization and mapping David FILLIAT ENSTA - 32 boulevard Victor - 7515 PARIS - France Email: david.filliat@ensta.fr Abstract Localization for
A Rapid Automatic Image Registration Method Based on Improved SIFT
 Available online at www.sciencedirect.com Procedia Environmental Sciences 11 (2011) 85 91 A Rapid Automatic Image Registration Method Based on Improved SIFT Zhu Hongbo, Xu Xuejun, Wang Jing, Chen Xuesong,
Available online at www.sciencedirect.com Procedia Environmental Sciences 11 (2011) 85 91 A Rapid Automatic Image Registration Method Based on Improved SIFT Zhu Hongbo, Xu Xuejun, Wang Jing, Chen Xuesong,
Implementation and Comparison of Feature Detection Methods in Image Mosaicing
 IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p-ISSN: 2278-8735 PP 07-11 www.iosrjournals.org Implementation and Comparison of Feature Detection Methods in Image
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p-ISSN: 2278-8735 PP 07-11 www.iosrjournals.org Implementation and Comparison of Feature Detection Methods in Image
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
AUTOMATIC FEATURE-BASED POINT CLOUD REGISTRATION FOR A MOVING SENSOR PLATFORM
 AUTOMATIC FEATURE-BASED POINT CLOUD REGISTRATION FOR A MOVING SENSOR PLATFORM Martin Weinmann, André Dittrich, Stefan Hinz, and Boris Jutzi Institute of Photogrammetry and Remote Sensing, Karlsruhe Institute
AUTOMATIC FEATURE-BASED POINT CLOUD REGISTRATION FOR A MOVING SENSOR PLATFORM Martin Weinmann, André Dittrich, Stefan Hinz, and Boris Jutzi Institute of Photogrammetry and Remote Sensing, Karlsruhe Institute
Vehicle Tracking using Optical Features
 Vehicle Tracking using Optical Features Songlin Piao Robotics Research Lab University of Kaiserslautern, Germany Outline Motivation State-of-Art Proposed System Experiments Conclusion Motivation Autonomous
Vehicle Tracking using Optical Features Songlin Piao Robotics Research Lab University of Kaiserslautern, Germany Outline Motivation State-of-Art Proposed System Experiments Conclusion Motivation Autonomous
Improved Appearance-Based Matching in Similar and Dynamic Environments using a Vocabulary Tree
 2010 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 2010, Anchorage, Alaska, USA Improved Appearance-Based Matching in Similar and Dynamic Environments
2010 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 2010, Anchorage, Alaska, USA Improved Appearance-Based Matching in Similar and Dynamic Environments
DEVELOPMENT OF A ROBUST IMAGE MOSAICKING METHOD FOR SMALL UNMANNED AERIAL VEHICLE
 DEVELOPMENT OF A ROBUST IMAGE MOSAICKING METHOD FOR SMALL UNMANNED AERIAL VEHICLE J. Kim and T. Kim* Dept. of Geoinformatic Engineering, Inha University, Incheon, Korea- jikim3124@inha.edu, tezid@inha.ac.kr
DEVELOPMENT OF A ROBUST IMAGE MOSAICKING METHOD FOR SMALL UNMANNED AERIAL VEHICLE J. Kim and T. Kim* Dept. of Geoinformatic Engineering, Inha University, Incheon, Korea- jikim3124@inha.edu, tezid@inha.ac.kr
A Comparison of SIFT, PCA-SIFT and SURF
 A Comparison of SIFT, PCA-SIFT and SURF Luo Juan Computer Graphics Lab, Chonbuk National University, Jeonju 561-756, South Korea qiuhehappy@hotmail.com Oubong Gwun Computer Graphics Lab, Chonbuk National
A Comparison of SIFT, PCA-SIFT and SURF Luo Juan Computer Graphics Lab, Chonbuk National University, Jeonju 561-756, South Korea qiuhehappy@hotmail.com Oubong Gwun Computer Graphics Lab, Chonbuk National
Scale Invariant Feature Transform
 Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
DeReEs: Real-Time Registration of RGBD Images Using Image-Based Feature Detection And Robust 3D Correspondence Estimation and Refinement
 DeReEs: Real-Time Registration of RGBD Images Using Image-Based Feature Detection And Robust 3D Correspondence Estimation and Refinement Sahand Seifi Memorial University of Newfoundland sahands[at]mun.ca
DeReEs: Real-Time Registration of RGBD Images Using Image-Based Feature Detection And Robust 3D Correspondence Estimation and Refinement Sahand Seifi Memorial University of Newfoundland sahands[at]mun.ca
Feature Matching and Robust Fitting
 Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
AN INDOOR SLAM METHOD BASED ON KINECT AND MULTI-FEATURE EXTENDED INFORMATION FILTER
 AN INDOOR SLAM METHOD BASED ON KINECT AND MULTI-FEATURE EXTENDED INFORMATION FILTER M. Chang a, b, Z. Kang a, a School of Land Science and Technology, China University of Geosciences, 29 Xueyuan Road,
AN INDOOR SLAM METHOD BASED ON KINECT AND MULTI-FEATURE EXTENDED INFORMATION FILTER M. Chang a, b, Z. Kang a, a School of Land Science and Technology, China University of Geosciences, 29 Xueyuan Road,
Beyond Points: Evaluating Recent 3D Scan-Matching Algorithms
 Beyond Points: Evaluating Recent 3D Scan-Matching Algorithms Martin Magnusson, Narunas Vaskevicius, 2 Todor Stoyanov, Kaustubh Pathak, 2 and Andreas Birk 2 Abstract Given that 3D scan matching is such
Beyond Points: Evaluating Recent 3D Scan-Matching Algorithms Martin Magnusson, Narunas Vaskevicius, 2 Todor Stoyanov, Kaustubh Pathak, 2 and Andreas Birk 2 Abstract Given that 3D scan matching is such
Graph-based SLAM (Simultaneous Localization And Mapping) for Bridge Inspection Using UAV (Unmanned Aerial Vehicle)
 for Bridge Inspection Using UAV (Unmanned Aerial Vehicle)") Graph-based SLAM (Simultaneous Localization And Mapping) for Bridge Inspection Using UAV (Unmanned Aerial Vehicle) Taekjun Oh 1), Sungwook Jung 2), Seungwon Song 3), and Hyun Myung 4) 1), 2), 3), 4) Urban
Graph-based SLAM (Simultaneous Localization And Mapping) for Bridge Inspection Using UAV (Unmanned Aerial Vehicle) Taekjun Oh 1), Sungwook Jung 2), Seungwon Song 3), and Hyun Myung 4) 1), 2), 3), 4) Urban
Semantic Mapping and Reasoning Approach for Mobile Robotics
 Semantic Mapping and Reasoning Approach for Mobile Robotics Caner GUNEY, Serdar Bora SAYIN, Murat KENDİR, Turkey Key words: Semantic mapping, 3D mapping, probabilistic, robotic surveying, mine surveying
Semantic Mapping and Reasoning Approach for Mobile Robotics Caner GUNEY, Serdar Bora SAYIN, Murat KENDİR, Turkey Key words: Semantic mapping, 3D mapping, probabilistic, robotic surveying, mine surveying
Proc. 14th Int. Conf. on Intelligent Autonomous Systems (IAS-14), 2016
, 2016") Proc. 14th Int. Conf. on Intelligent Autonomous Systems (IAS-14), 2016 Outdoor Robot Navigation Based on View-based Global Localization and Local Navigation Yohei Inoue, Jun Miura, and Shuji Oishi Department
Proc. 14th Int. Conf. on Intelligent Autonomous Systems (IAS-14), 2016 Outdoor Robot Navigation Based on View-based Global Localization and Local Navigation Yohei Inoue, Jun Miura, and Shuji Oishi Department
Field-of-view dependent registration of point clouds and incremental segmentation of table-tops using time-offlight
 Field-of-view dependent registration of point clouds and incremental segmentation of table-tops using time-offlight cameras Dipl.-Ing. Georg Arbeiter Fraunhofer Institute for Manufacturing Engineering
Field-of-view dependent registration of point clouds and incremental segmentation of table-tops using time-offlight cameras Dipl.-Ing. Georg Arbeiter Fraunhofer Institute for Manufacturing Engineering
Quasi-thematic Features Detection & Tracking. Future Rover Long-Distance Autonomous Navigation
 Quasi-thematic Feature Detection And Tracking For Future Rover Long-Distance Autonomous Navigation Authors: Affan Shaukat, Conrad Spiteri, Yang Gao, Said Al-Milli, and Abhinav Bajpai Surrey Space Centre,
Quasi-thematic Feature Detection And Tracking For Future Rover Long-Distance Autonomous Navigation Authors: Affan Shaukat, Conrad Spiteri, Yang Gao, Said Al-Milli, and Abhinav Bajpai Surrey Space Centre,
Object Reconstruction
 B. Scholz Object Reconstruction 1 / 39 MIN-Fakultät Fachbereich Informatik Object Reconstruction Benjamin Scholz Universität Hamburg Fakultät für Mathematik, Informatik und Naturwissenschaften Fachbereich
B. Scholz Object Reconstruction 1 / 39 MIN-Fakultät Fachbereich Informatik Object Reconstruction Benjamin Scholz Universität Hamburg Fakultät für Mathematik, Informatik und Naturwissenschaften Fachbereich
Introduction to SLAM Part II. Paul Robertson
 Introduction to SLAM Part II Paul Robertson Localization Review Tracking, Global Localization, Kidnapping Problem. Kalman Filter Quadratic Linear (unless EKF) SLAM Loop closing Scaling: Partition space
Introduction to SLAM Part II Paul Robertson Localization Review Tracking, Global Localization, Kidnapping Problem. Kalman Filter Quadratic Linear (unless EKF) SLAM Loop closing Scaling: Partition space
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
Robotics. Lecture 7: Simultaneous Localisation and Mapping (SLAM)
") Robotics Lecture 7: Simultaneous Localisation and Mapping (SLAM) See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College
Robotics Lecture 7: Simultaneous Localisation and Mapping (SLAM) See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College
Filtering and mapping systems for underwater 3D imaging sonar
 Filtering and mapping systems for underwater 3D imaging sonar Tomohiro Koshikawa 1, a, Shin Kato 1,b, and Hitoshi Arisumi 1,c 1 Field Robotics Research Group, National Institute of Advanced Industrial
Filtering and mapping systems for underwater 3D imaging sonar Tomohiro Koshikawa 1, a, Shin Kato 1,b, and Hitoshi Arisumi 1,c 1 Field Robotics Research Group, National Institute of Advanced Industrial
Improvements for an appearance-based SLAM-Approach for large-scale environments
 1 Improvements for an appearance-based SLAM-Approach for large-scale environments Alexander Koenig Jens Kessler Horst-Michael Gross Neuroinformatics and Cognitive Robotics Lab, Ilmenau University of Technology,
1 Improvements for an appearance-based SLAM-Approach for large-scale environments Alexander Koenig Jens Kessler Horst-Michael Gross Neuroinformatics and Cognitive Robotics Lab, Ilmenau University of Technology,
Scale Invariant Feature Transform
 Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Fast place recognition with plane-based maps
 2013 IEEE International Conference on Robotics and Automation (ICRA) Karlsruhe, Germany, May 6-10, 2013 Fast place recognition with plane-based maps E. Fernández-Moral 1, W. Mayol-Cuevas 2, V. Arévalo
2013 IEEE International Conference on Robotics and Automation (ICRA) Karlsruhe, Germany, May 6-10, 2013 Fast place recognition with plane-based maps E. Fernández-Moral 1, W. Mayol-Cuevas 2, V. Arévalo
Robotics. Lecture 8: Simultaneous Localisation and Mapping (SLAM)
") Robotics Lecture 8: Simultaneous Localisation and Mapping (SLAM) See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College
Robotics Lecture 8: Simultaneous Localisation and Mapping (SLAM) See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College
Vision-Only Autonomous Navigation Using Topometric Maps
 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 2013. Tokyo, Japan Vision-Only Autonomous Navigation Using Topometric Maps Feras Dayoub, Timothy Morris, Ben
2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 2013. Tokyo, Japan Vision-Only Autonomous Navigation Using Topometric Maps Feras Dayoub, Timothy Morris, Ben
CS 378: Autonomous Intelligent Robotics. Instructor: Jivko Sinapov
 CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Visual Registration and Recognition Announcements Homework 6 is out, due 4/5 4/7 Installing
CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Visual Registration and Recognition Announcements Homework 6 is out, due 4/5 4/7 Installing
Introduction. Introduction. Related Research. SIFT method. SIFT method. Distinctive Image Features from Scale-Invariant. Scale.
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Digital Image Processing
 Digital Image Processing Part 2: Image Enhancement in the Spatial Domain AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 3 2011-04-06 Contents
Digital Image Processing Part 2: Image Enhancement in the Spatial Domain AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 3 2011-04-06 Contents
Computer and Machine Vision
 Computer and Machine Vision Lecture Week 4 Part-2 February 5, 2014 Sam Siewert Outline of Week 4 Practical Methods for Dealing with Camera Streams, Frame by Frame and De-coding/Re-encoding for Analysis
Computer and Machine Vision Lecture Week 4 Part-2 February 5, 2014 Sam Siewert Outline of Week 4 Practical Methods for Dealing with Camera Streams, Frame by Frame and De-coding/Re-encoding for Analysis
GeoSLAM Overview. The global leader in go anywhere 3D mobile mapping technology. 1
 GeoSLAM Overview The global leader in go anywhere 3D mobile mapping technology. 1 About GeoSLAM The global leader in go anywhere 3D mobile mapping technology. 2 Who We Are GeoSLAM is a global market leader
GeoSLAM Overview The global leader in go anywhere 3D mobile mapping technology. 1 About GeoSLAM The global leader in go anywhere 3D mobile mapping technology. 2 Who We Are GeoSLAM is a global market leader
3D Perception. CS 4495 Computer Vision K. Hawkins. CS 4495 Computer Vision. 3D Perception. Kelsey Hawkins Robotics
 CS 4495 Computer Vision Kelsey Hawkins Robotics Motivation What do animals, people, and robots want to do with vision? Detect and recognize objects/landmarks Find location of objects with respect to themselves
CS 4495 Computer Vision Kelsey Hawkins Robotics Motivation What do animals, people, and robots want to do with vision? Detect and recognize objects/landmarks Find location of objects with respect to themselves
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
A Sparse Hybrid Map for Vision-Guided Mobile Robots
 A Sparse Hybrid Map for Vision-Guided Mobile Robots Feras Dayoub Grzegorz Cielniak Tom Duckett Department of Computing and Informatics, University of Lincoln, Lincoln, UK {fdayoub,gcielniak,tduckett}@lincoln.ac.uk
A Sparse Hybrid Map for Vision-Guided Mobile Robots Feras Dayoub Grzegorz Cielniak Tom Duckett Department of Computing and Informatics, University of Lincoln, Lincoln, UK {fdayoub,gcielniak,tduckett}@lincoln.ac.uk
A Comparative Evaluation of Interest Point Detectors and Local Descriptors for Visual SLAM
 Machine Vision and Applications manuscript No. (will be inserted by the editor) Arturo Gil Oscar Martinez Mozos Monica Ballesta Oscar Reinoso A Comparative Evaluation of Interest Point Detectors and Local
Machine Vision and Applications manuscript No. (will be inserted by the editor) Arturo Gil Oscar Martinez Mozos Monica Ballesta Oscar Reinoso A Comparative Evaluation of Interest Point Detectors and Local
Robust Place Recognition for 3D Range Data based on Point Features
 21 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 21, Anchorage, Alaska, USA Robust Place Recognition for 3D Range Data based on Point Features Bastian
21 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 21, Anchorage, Alaska, USA Robust Place Recognition for 3D Range Data based on Point Features Bastian
Scale Invariant Feature Transform by David Lowe
 Scale Invariant Feature Transform by David Lowe Presented by: Jerry Chen Achal Dave Vaishaal Shankar Some slides from Jason Clemons Motivation Image Matching Correspondence Problem Desirable Feature Characteristics
Scale Invariant Feature Transform by David Lowe Presented by: Jerry Chen Achal Dave Vaishaal Shankar Some slides from Jason Clemons Motivation Image Matching Correspondence Problem Desirable Feature Characteristics
Large-Scale 3D Point Cloud Processing Tutorial 2013
 Large-Scale 3D Point Cloud Processing Tutorial 2013 Features The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in Prof.
Large-Scale 3D Point Cloud Processing Tutorial 2013 Features The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in Prof.
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering