Another Look at Camera Control
|
|
|
- Geraldine Parrish
- 6 years ago
- Views:
Transcription
1 Another Look at Camera Control Karan Singh, Cindy Grimm, Nisha Sudarsanan Media and Machines Lab Department of Computer Science and Engineering Washington University in St. Louis University of Toronto 1
2 What is camera control? Manipulation of camera parameters Projection of 3D geometry into 2D plane Applications Interactively navigate around a scene (games) Create a fixed camera path (movies) Use different viewpoints to understand structure (visualization) Take pictures 2 Cameras
3 Cameras in different fields Computer graphics From, at, up, field of view View matrix Position Look Vector θ W Width An Heig Aspe θ H Near Distance Far Distance 3 Cameras
 Film, photography Camera is physical object Describe movement of camera itself")

4 Cameras in different fields (cont.) Film, photography Camera is physical object Describe movement of camera itself Dolly in/out, tilt, pan, roll Zoom in/out Graphics systems use same vocabulary Through-the-lens Exterior views Camera-centric Reposition the camera Object-centric Reposition the camera relative to an object 4 Cameras
5 Cameras in different fields (cont.) Mathematics 4X4 matrix 11 degrees of freedom Computer vision Straight lines to straight lines 3X4 matrix Don t keep depth Graphics maps 11 dof to useful parameters J. C. Michener, I. B. Carlbom, Natural and efficient viewing parameters, SIGGRAPH 80 Six extrinsic parameters (position, orientation) 5 intrinsic parameters (center-of-projection, focal length, skew, aspect ratio) 5 Cameras
 Artists have a qualitative vocabulary Describe relationship of camera to object in the scene Vanishing")
6 Cameras in different fields (cont.) Artists have a qualitative vocabulary Describe relationship of camera to object in the scene Vanishing point Perspective effects One point Horizon line Two point Three point 6 Cameras
7 Goals Visualization of camera parameters in the 2D image E.g., feed back on perspective distortion Manipulate current projection New position indicates desired projection change Changes appropriate camera parameters May change multiple parameters Minimal mouse, keyboard use Current approaches use entire right button Click-through interface 7 Cameras

8 Related work Original camera paper J. C. Michener, I. B. Carlbom, Natural and efficient viewing parameters, SIGGRAPH 80 Trackball manipulation Michael Chen, S. Joy Mountford, and Abigail Sellen, A Study in Interactive 3D Rotation using 2D Input Devices, SIGGRAPH K. Henriksen, J. Sporring, and K. Hornbaek Virtual trackballs revisited, IEEE TVCG 8 Cameras

9 Related work Through-the-lens camera control Use image constraints to change camera parameters Not very stable Jim Blinn, Where am I? What am I Looking at?, IEEE CG&A, 1988 Michael Gleicher and Andrew Witkin, Through-the-lens camera control, SIGGRAPH 92 9 Cameras
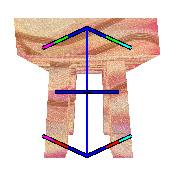
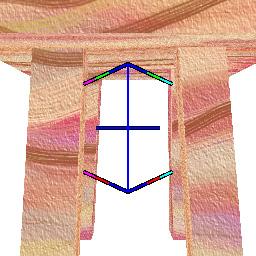
10 The IBar A cube centered along the look vector Changing the rendering of the cube changes the camera in a corresponding way Different segments move limbs simultaneously Cyan = top and bottom left limbs Red = left and right bottom limbs Rendering of cube reflects projection parameters 10 Cameras
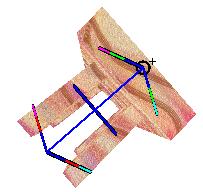


11 Demo (traditional) Rotate left-right up-down spin Allows framing Pan (camera-centric) Pan (object-centric) Dolly in and out Zoom (camera-centric) Zoom (object-centric) 11 Cameras

 12")
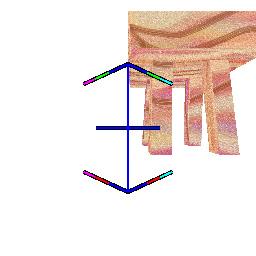
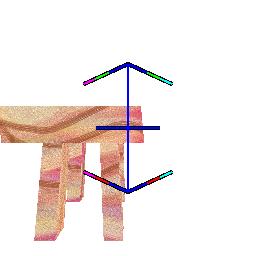
12 Demo (Perspective change) Dolly + zoom Dolly in and out Center of projection (horizontal vertical) 12 Cameras
 Skew")

13 Demo (Just Weird) Skew Aspect ratio 13 Cameras
14 Camera- versus object-centric Camera-centric Allows framing of objects Position cube in relation to scene Object-centric Traditional camera-moves-with-mouse Nice to have both Map different limbs E.g., zoom using the left handle is cameracentric, the right handle is object-centric 14 Cameras
15 Some implementation details Camera parameters T Eye position L Look vector V Up vector W,H width, height f focal length u 0,v 0 center of projection d distance to object V W v 0 u0 T L f H R V f d H θ T L 15 Cameras
16 Drawing the IBar Cube edge is centered on look vector Adjust for center of projection Size of cube adjusted so is always s c high on screen s I I I t tl = dh / f r = T + dl + su v = I + s sv m c v = I s sr + s m t c 0 c r R + v sl v 0 r sv 16 Cameras
17 Drawing the IBar (cont.) Draw horizontal bar at horizon line t p 1 p 2 1-t 17 Cameras
18 Drawing the IBar (cont.) Feedback IBar highlights when mouse is over active part Indicate selected segment with circle 18 Cameras
19 Manipulating the IBar Relative, not absolute Determine which limb, and which segment selected Determine ratio/percentage moved Change corresponding parameter(s) by ratio E.g., Multiply zoom by ratio of length change Pan by mouse movement s = dh / T = T + f sv x r R + sv y r V 19 Cameras
20 Manipulating the IBar Limb movement constrained to vertical (or horizontal) Shift key unconstrains Left-right movement rotates up or down Up-down movement changes center of projection Pan unconstrained Shift key constrains Stem Shift chooses aspect ratio or skew 20 Cameras
21 Dolly plus zoom Changing parameters Calculate dolly in simultaneously Find zoom that keeps everything at a distance d away the same size Center of projection Translate in reverse direction 21 Cameras
22 Camera- versus object-centric Camera-centric Render cube with new camera, scene with original camera Object-centric Render both cube and scene with new camera Changing parameters Invert operation (i.e., pan in the opposite direction) 22 Cameras
23 Centering the IBar on an object Allows rotation around arbitrary point User selects point p in scene Determines d Render at p I m = p + r dl + su r R 0 + v 0 r sv Rotation Translate p to origin (and camera) Rotate Translate back 23 Cameras


24 In practice In use in short animated film, Ryan Used for dramatic perspective changes 24 Cameras
25 Summary Visualization of COP, horizon line, perspective distortion Also at arbitrary points in the scene One mouse button for all 11 parameters Shift key chooses less-common action Click through interface Toggle key for disabling Usable perspective manipulation Simultaneous editing of parameters 25 Cameras
26 Drawbacks Remembering which parameters go where Visual clutter User study comparing IBar to Maya camera Primary conclusion: camera manipulation is hard for both naïve and knowledgeable users Unable to manipulate camera to match a target scene IBar helped people to learn camera manipulation 26 Cameras
27 Future work Reducing number of parameters on widget Multiple widgets, quick swap between them Similar handles Pre-viewing of manipulation effects What does this handle do? Bookmarking and camera paths Visualizing in scene May be out of scene 27 Cameras
Implementing the IBar Camera Widget
 Implementing the IBar Camera Widget Karan Singh Univ. of Toronto Cindy Grimm Washington Univ. in St. Louis Figure 1: Using the IBar to adjust the perspective distortion of a scene. Abstract We present
Implementing the IBar Camera Widget Karan Singh Univ. of Toronto Cindy Grimm Washington Univ. in St. Louis Figure 1: Using the IBar to adjust the perspective distortion of a scene. Abstract We present
Implementation of the IBar: A Perspective-based Camera Widget
 Implementation of the IBar: A Perspective-based Camera Widget Category: Research Figure 1: Using the IBar to adjust the perspective distortion of a scene. Abstract We present the implementation of a new
Implementation of the IBar: A Perspective-based Camera Widget Category: Research Figure 1: Using the IBar to adjust the perspective distortion of a scene. Abstract We present the implementation of a new
WUCSE The IBar: A Perspective-based Camera Widget
 WUCSE-2004-32 The IBar: A Perspective-based Camera Widget Category: Research Figure 1: Changing the perspective distortion of the scene. Abstract We present a new widget, the IBar, for controlling all
WUCSE-2004-32 The IBar: A Perspective-based Camera Widget Category: Research Figure 1: Changing the perspective distortion of the scene. Abstract We present a new widget, the IBar, for controlling all
Scene Modeling for a Single View
 Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, Breaking out of 2D now we are ready to break out of 2D And enter the
Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, Breaking out of 2D now we are ready to break out of 2D And enter the
Scene Modeling for a Single View
 Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Classes
Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Classes
CIS 580, Machine Perception, Spring 2015 Homework 1 Due: :59AM
 CIS 580, Machine Perception, Spring 2015 Homework 1 Due: 2015.02.09. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Camera Model, Focal Length and
CIS 580, Machine Perception, Spring 2015 Homework 1 Due: 2015.02.09. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Camera Model, Focal Length and
CIS 580, Machine Perception, Spring 2016 Homework 2 Due: :59AM
 CIS 580, Machine Perception, Spring 2016 Homework 2 Due: 2015.02.24. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Recover camera orientation By observing
CIS 580, Machine Perception, Spring 2016 Homework 2 Due: 2015.02.24. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Recover camera orientation By observing
Scene Modeling for a Single View
 Scene Modeling for a Single View René MAGRITTE Portrait d'edward James CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2014 Steve
Scene Modeling for a Single View René MAGRITTE Portrait d'edward James CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2014 Steve
Autodesk Navisworks Freedom Quick Reference Guide
 WP CAD 00074 March 2012 Guide by Andy Davis Autodesk Navisworks Freedom Quick Reference Guide Quick Reference Guide to Autodesk Navisworks Freedom Opening a Model To open a model, click on the Application
WP CAD 00074 March 2012 Guide by Andy Davis Autodesk Navisworks Freedom Quick Reference Guide Quick Reference Guide to Autodesk Navisworks Freedom Opening a Model To open a model, click on the Application
Image Transformations & Camera Calibration. Mašinska vizija, 2018.
 Image Transformations & Camera Calibration Mašinska vizija, 2018. Image transformations What ve we learnt so far? Example 1 resize and rotate Open warp_affine_template.cpp Perform simple resize
Image Transformations & Camera Calibration Mašinska vizija, 2018. Image transformations What ve we learnt so far? Example 1 resize and rotate Open warp_affine_template.cpp Perform simple resize
I N T R O D U C T I O N T O C O M P U T E R G R A P H I C S
 3D Viewing: the Synthetic Camera Programmer s reference model for specifying 3D view projection parameters to the computer General synthetic camera (e.g., PHIGS Camera, Computer Graphics: Principles and
3D Viewing: the Synthetic Camera Programmer s reference model for specifying 3D view projection parameters to the computer General synthetic camera (e.g., PHIGS Camera, Computer Graphics: Principles and
CS4670: Computer Vision
 CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
Profile Modeler Profile Modeler ( A SuperControl Product )
") Profile Modeler ( A SuperControl Product ) - 1 - Index Overview... 3 Terminology... 3 Launching the Application... 4 File Menu... 4 Loading a File:... 4 To Load Multiple Files:... 4 Clearing Loaded Files:...
Profile Modeler ( A SuperControl Product ) - 1 - Index Overview... 3 Terminology... 3 Launching the Application... 4 File Menu... 4 Loading a File:... 4 To Load Multiple Files:... 4 Clearing Loaded Files:...
Projective Geometry and Camera Models
 /2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
/2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
Computer Graphics 7: Viewing in 3-D
 Computer Graphics 7: Viewing in 3-D In today s lecture we are going to have a look at: Transformations in 3-D How do transformations in 3-D work? Contents 3-D homogeneous coordinates and matrix based transformations
Computer Graphics 7: Viewing in 3-D In today s lecture we are going to have a look at: Transformations in 3-D How do transformations in 3-D work? Contents 3-D homogeneous coordinates and matrix based transformations
Camera Model and Calibration
 Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Geometric camera models and calibration
 Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Homogeneous Coordinates. Lecture18: Camera Models. Representation of Line and Point in 2D. Cross Product. Overall scaling is NOT important.
 Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
Computer Graphics. P05 Viewing in 3D. Part 1. Aleksandra Pizurica Ghent University
 Computer Graphics P05 Viewing in 3D Part 1 Aleksandra Pizurica Ghent University Telecommunications and Information Processing Image Processing and Interpretation Group Viewing in 3D: context Create views
Computer Graphics P05 Viewing in 3D Part 1 Aleksandra Pizurica Ghent University Telecommunications and Information Processing Image Processing and Interpretation Group Viewing in 3D: context Create views
3D Viewing. CMPT 361 Introduction to Computer Graphics Torsten Möller. Machiraju/Zhang/Möller
 3D Viewing CMPT 361 Introduction to Computer Graphics Torsten Möller Reading Chapter 4 of Angel Chapter 6 of Foley, van Dam, 2 Objectives What kind of camera we use? (pinhole) What projections make sense
3D Viewing CMPT 361 Introduction to Computer Graphics Torsten Möller Reading Chapter 4 of Angel Chapter 6 of Foley, van Dam, 2 Objectives What kind of camera we use? (pinhole) What projections make sense
Camera Model and Calibration. Lecture-12
 Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Projective Geometry and Camera Models
 Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
3D Viewing. Introduction to Computer Graphics Torsten Möller. Machiraju/Zhang/Möller
 3D Viewing Introduction to Computer Graphics Torsten Möller Machiraju/Zhang/Möller Reading Chapter 4 of Angel Chapter 13 of Hughes, van Dam, Chapter 7 of Shirley+Marschner Machiraju/Zhang/Möller 2 Objectives
3D Viewing Introduction to Computer Graphics Torsten Möller Machiraju/Zhang/Möller Reading Chapter 4 of Angel Chapter 13 of Hughes, van Dam, Chapter 7 of Shirley+Marschner Machiraju/Zhang/Möller 2 Objectives
COSC579: Scene Geometry. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 5: Projection Reading: Szeliski 2.1 Projection Reading: Szeliski 2.1 Projection Müller Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html Modeling
CS6670: Computer Vision Noah Snavely Lecture 5: Projection Reading: Szeliski 2.1 Projection Reading: Szeliski 2.1 Projection Müller Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html Modeling
Models and Architectures
 Models and Architectures Objectives Learn the basic design of a graphics system Introduce graphics pipeline architecture Examine software components for an interactive graphics system 1 Image Formation
Models and Architectures Objectives Learn the basic design of a graphics system Introduce graphics pipeline architecture Examine software components for an interactive graphics system 1 Image Formation
DD2423 Image Analysis and Computer Vision IMAGE FORMATION. Computational Vision and Active Perception School of Computer Science and Communication
 DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
Single-view 3D Reconstruction
 Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Autodesk Moldflow Insight AMI User Interface
 Autodesk Moldflow Insight 2012 AMI User Interface Revision 1, 18 March 2012. This document contains Autodesk and third-party software license agreements/notices and/or additional terms and conditions for
Autodesk Moldflow Insight 2012 AMI User Interface Revision 1, 18 March 2012. This document contains Autodesk and third-party software license agreements/notices and/or additional terms and conditions for
User InterfaceChapter1:
 Chapter 1 User InterfaceChapter1: In this chapter you will learn about several aspects of the User Interface. You will learn about the overall layout of the UI, and then about the details of each element.
Chapter 1 User InterfaceChapter1: In this chapter you will learn about several aspects of the User Interface. You will learn about the overall layout of the UI, and then about the details of each element.
Computer Graphics Introduction. Taku Komura
 Computer Graphics Introduction Taku Komura What s this course all about? We will cover Graphics programming and algorithms Graphics data structures Applied geometry, modeling and rendering Not covering
Computer Graphics Introduction Taku Komura What s this course all about? We will cover Graphics programming and algorithms Graphics data structures Applied geometry, modeling and rendering Not covering
3D Viewing. CS 4620 Lecture 8
 3D Viewing CS 46 Lecture 8 13 Steve Marschner 1 Viewing, backward and forward So far have used the backward approach to viewing start from pixel ask what part of scene projects to pixel explicitly construct
3D Viewing CS 46 Lecture 8 13 Steve Marschner 1 Viewing, backward and forward So far have used the backward approach to viewing start from pixel ask what part of scene projects to pixel explicitly construct
1 Projective Geometry
 CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
Scene Modeling for a Single View
 on to 3D Scene Modeling for a Single View We want real 3D scene walk-throughs: rotation translation Can we do it from a single photograph? Reading: A. Criminisi, I. Reid and A. Zisserman, Single View Metrology
on to 3D Scene Modeling for a Single View We want real 3D scene walk-throughs: rotation translation Can we do it from a single photograph? Reading: A. Criminisi, I. Reid and A. Zisserman, Single View Metrology
Announcements. Submitting Programs Upload source and executable(s) (Windows or Mac) to digital dropbox on Blackboard
 (Windows or Mac) to digital dropbox on Blackboard") Now Playing: Vertex Processing: Viewing Coulibaly Amadou & Mariam from Dimanche a Bamako Released August 2, 2005 Rick Skarbez, Instructor COMP 575 September 27, 2007 Announcements Programming Assignment
Now Playing: Vertex Processing: Viewing Coulibaly Amadou & Mariam from Dimanche a Bamako Released August 2, 2005 Rick Skarbez, Instructor COMP 575 September 27, 2007 Announcements Programming Assignment
The Vizard IDE: Inspector
 Show The Vizard IDE: Inspector Inspector is a visual tool for browsing the scene graph of any Viz ard compatible 3d model. Use it to: Identify sub- parts of models so that you can get a handle to and manipulate
Show The Vizard IDE: Inspector Inspector is a visual tool for browsing the scene graph of any Viz ard compatible 3d model. Use it to: Identify sub- parts of models so that you can get a handle to and manipulate
3D Viewing. CS 4620 Lecture Steve Marschner. Cornell CS4620 Spring 2018 Lecture 9
 3D Viewing CS 46 Lecture 9 Cornell CS46 Spring 18 Lecture 9 18 Steve Marschner 1 Viewing, backward and forward So far have used the backward approach to viewing start from pixel ask what part of scene
3D Viewing CS 46 Lecture 9 Cornell CS46 Spring 18 Lecture 9 18 Steve Marschner 1 Viewing, backward and forward So far have used the backward approach to viewing start from pixel ask what part of scene
Computer Vision Projective Geometry and Calibration. Pinhole cameras
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision cmput 428/615
 Computer Vision cmput 428/615 Basic 2D and 3D geometry and Camera models Martin Jagersand The equation of projection Intuitively: How do we develop a consistent mathematical framework for projection calculations?
Computer Vision cmput 428/615 Basic 2D and 3D geometry and Camera models Martin Jagersand The equation of projection Intuitively: How do we develop a consistent mathematical framework for projection calculations?
CHAPTER 3. Single-view Geometry. 1. Consequences of Projection
 CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
User Interaction. User Interaction. Input devices. Input devices. Input devices GUIs and GUI design Event-driven programming 3D interaction
 User Interaction User Interaction Input devices GUIs and GUI design Event-driven programming 3D interaction CS 465 lecture 19 2003 Steve Marschner 1 2003 Steve Marschner 2 Input devices Input devices Discrete
User Interaction User Interaction Input devices GUIs and GUI design Event-driven programming 3D interaction CS 465 lecture 19 2003 Steve Marschner 1 2003 Steve Marschner 2 Input devices Input devices Discrete
Agenda. Rotations. Camera calibration. Homography. Ransac
 Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Maya Lesson 3 Temple Base & Columns
 Maya Lesson 3 Temple Base & Columns Make a new Folder inside your Computer Animation Folder and name it: Temple Save using Save As, and select Incremental Save, with 5 Saves. Name: Lesson3Temple YourName.ma
Maya Lesson 3 Temple Base & Columns Make a new Folder inside your Computer Animation Folder and name it: Temple Save using Save As, and select Incremental Save, with 5 Saves. Name: Lesson3Temple YourName.ma
Overview. By end of the week:
 Overview By end of the week: - Know the basics of git - Make sure we can all compile and run a C++/ OpenGL program - Understand the OpenGL rendering pipeline - Understand how matrices are used for geometric
Overview By end of the week: - Know the basics of git - Make sure we can all compile and run a C++/ OpenGL program - Understand the OpenGL rendering pipeline - Understand how matrices are used for geometric
Advances in MicroStation 3D
 MW1HC515 Advances in MicroStation 3D Hands-on class sponsored by the Bentley Institute Presenter: Sam Hendrick, Senior MicroStation Product Consultant Bentley Systems, Incorporated 685 Stockton Drive Exton,
MW1HC515 Advances in MicroStation 3D Hands-on class sponsored by the Bentley Institute Presenter: Sam Hendrick, Senior MicroStation Product Consultant Bentley Systems, Incorporated 685 Stockton Drive Exton,
COMP 175 COMPUTER GRAPHICS. Ray Casting. COMP 175: Computer Graphics April 26, Erik Anderson 09 Ray Casting
 Ray Casting COMP 175: Computer Graphics April 26, 2018 1/41 Admin } Assignment 4 posted } Picking new partners today for rest of the assignments } Demo in the works } Mac demo may require a new dylib I
Ray Casting COMP 175: Computer Graphics April 26, 2018 1/41 Admin } Assignment 4 posted } Picking new partners today for rest of the assignments } Demo in the works } Mac demo may require a new dylib I
Lecture 3 Sections 2.2, 4.4. Mon, Aug 31, 2009
 Model s Lecture 3 Sections 2.2, 4.4 World s Eye s Clip s s s Window s Hampden-Sydney College Mon, Aug 31, 2009 Outline Model s World s Eye s Clip s s s Window s 1 2 3 Model s World s Eye s Clip s s s Window
Model s Lecture 3 Sections 2.2, 4.4 World s Eye s Clip s s s Window s Hampden-Sydney College Mon, Aug 31, 2009 Outline Model s World s Eye s Clip s s s Window s 1 2 3 Model s World s Eye s Clip s s s Window
MERGING POINT CLOUDS FROM MULTIPLE KINECTS. Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia
 MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
Computer Vision Project-1
 University of Utah, School Of Computing Computer Vision Project- Singla, Sumedha sumedha.singla@utah.edu (00877456 February, 205 Theoretical Problems. Pinhole Camera (a A straight line in the world space
University of Utah, School Of Computing Computer Vision Project- Singla, Sumedha sumedha.singla@utah.edu (00877456 February, 205 Theoretical Problems. Pinhole Camera (a A straight line in the world space
5LSH0 Advanced Topics Video & Analysis
 1 Multiview 3D video / Outline 2 Advanced Topics Multimedia Video (5LSH0), Module 02 3D Geometry, 3D Multiview Video Coding & Rendering Peter H.N. de With, Sveta Zinger & Y. Morvan ( p.h.n.de.with@tue.nl
1 Multiview 3D video / Outline 2 Advanced Topics Multimedia Video (5LSH0), Module 02 3D Geometry, 3D Multiview Video Coding & Rendering Peter H.N. de With, Sveta Zinger & Y. Morvan ( p.h.n.de.with@tue.nl
Beginners Guide Maya. To be used next to Learning Maya 5 Foundation. 15 juni 2005 Clara Coepijn Raoul Franker
 Beginners Guide Maya To be used next to Learning Maya 5 Foundation 15 juni 2005 Clara Coepijn 0928283 Raoul Franker 1202596 Index Index 1 Introduction 2 The Interface 3 Main Shortcuts 4 Building a Character
Beginners Guide Maya To be used next to Learning Maya 5 Foundation 15 juni 2005 Clara Coepijn 0928283 Raoul Franker 1202596 Index Index 1 Introduction 2 The Interface 3 Main Shortcuts 4 Building a Character
Rigid Body Motion and Image Formation. Jana Kosecka, CS 482
 Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Augmented Reality II - Camera Calibration - Gudrun Klinker May 11, 2004
 Augmented Reality II - Camera Calibration - Gudrun Klinker May, 24 Literature Richard Hartley and Andrew Zisserman, Multiple View Geometry in Computer Vision, Cambridge University Press, 2. (Section 5,
Augmented Reality II - Camera Calibration - Gudrun Klinker May, 24 Literature Richard Hartley and Andrew Zisserman, Multiple View Geometry in Computer Vision, Cambridge University Press, 2. (Section 5,
Computer Viewing. CS 537 Interactive Computer Graphics Prof. David E. Breen Department of Computer Science
 Computer Viewing CS 537 Interactive Computer Graphics Prof. David E. Breen Department of Computer Science 1 Objectives Introduce the mathematics of projection Introduce OpenGL viewing functions Look at
Computer Viewing CS 537 Interactive Computer Graphics Prof. David E. Breen Department of Computer Science 1 Objectives Introduce the mathematics of projection Introduce OpenGL viewing functions Look at
Lecture 5: Transforms II. Computer Graphics and Imaging UC Berkeley CS184/284A
 Lecture 5: Transforms II Computer Graphics and Imaging UC Berkeley 3D Transforms 3D Transformations Use homogeneous coordinates again: 3D point = (x, y, z, 1) T 3D vector = (x, y, z, 0) T Use 4 4 matrices
Lecture 5: Transforms II Computer Graphics and Imaging UC Berkeley 3D Transforms 3D Transformations Use homogeneous coordinates again: 3D point = (x, y, z, 1) T 3D vector = (x, y, z, 0) T Use 4 4 matrices
Week 1 The Blender Interface and Basic Shapes
 Week 1 The Blender Interface and Basic Shapes Blender Blender is an open-source 3d software that we will use for this class to create our 3d game. Blender is as powerful as 3d Studio Max and Maya and has
Week 1 The Blender Interface and Basic Shapes Blender Blender is an open-source 3d software that we will use for this class to create our 3d game. Blender is as powerful as 3d Studio Max and Maya and has
Outline. ETN-FPI Training School on Plenoptic Sensing
 Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Beginning Paint 3D A Step by Step Tutorial. By Len Nasman
 A Step by Step Tutorial By Len Nasman Table of Contents Introduction... 3 The Paint 3D User Interface...4 Creating 2D Shapes...5 Drawing Lines with Paint 3D...6 Straight Lines...6 Multi-Point Curves...6
A Step by Step Tutorial By Len Nasman Table of Contents Introduction... 3 The Paint 3D User Interface...4 Creating 2D Shapes...5 Drawing Lines with Paint 3D...6 Straight Lines...6 Multi-Point Curves...6
Transforming Objects and Components
 4 Transforming Objects and Components Arrow selection Lasso selection Paint selection Move Rotate Scale Universal Manipulator Soft Modification Show Manipulator Last tool used Figure 4.1 Maya s manipulation
4 Transforming Objects and Components Arrow selection Lasso selection Paint selection Move Rotate Scale Universal Manipulator Soft Modification Show Manipulator Last tool used Figure 4.1 Maya s manipulation
Prof. Feng Liu. Fall /19/2016
 Prof. Feng Liu Fall 26 http://www.cs.pdx.edu/~fliu/courses/cs447/ /9/26 Last time More 2D Transformations Homogeneous Coordinates 3D Transformations The Viewing Pipeline 2 Today Perspective projection
Prof. Feng Liu Fall 26 http://www.cs.pdx.edu/~fliu/courses/cs447/ /9/26 Last time More 2D Transformations Homogeneous Coordinates 3D Transformations The Viewing Pipeline 2 Today Perspective projection
This lesson introduces Blender, covering the tools and concepts necessary to set up a minimal scene in virtual 3D space.
 3D Modeling with Blender: 01. Blender Basics Overview This lesson introduces Blender, covering the tools and concepts necessary to set up a minimal scene in virtual 3D space. Concepts Covered Blender s
3D Modeling with Blender: 01. Blender Basics Overview This lesson introduces Blender, covering the tools and concepts necessary to set up a minimal scene in virtual 3D space. Concepts Covered Blender s
Project report Augmented reality with ARToolKit
 Project report Augmented reality with ARToolKit FMA175 Image Analysis, Project Mathematical Sciences, Lund Institute of Technology Supervisor: Petter Strandmark Fredrik Larsson (dt07fl2@student.lth.se)
Project report Augmented reality with ARToolKit FMA175 Image Analysis, Project Mathematical Sciences, Lund Institute of Technology Supervisor: Petter Strandmark Fredrik Larsson (dt07fl2@student.lth.se)
Camera Actions. Shots, Angles & Movements
 Camera Actions Shots, Angles & Movements Camera Shots (Shot Sizes) Camera Shots There are several different Camera Shots used in TV and Film Production. Each Camera Shot is given a name and description
Camera Actions Shots, Angles & Movements Camera Shots (Shot Sizes) Camera Shots There are several different Camera Shots used in TV and Film Production. Each Camera Shot is given a name and description
Computer Graphics. Chapter 10 Three-Dimensional Viewing
 Computer Graphics Chapter 10 Three-Dimensional Viewing Chapter 10 Three-Dimensional Viewing Part I. Overview of 3D Viewing Concept 3D Viewing Pipeline vs. OpenGL Pipeline 3D Viewing-Coordinate Parameters
Computer Graphics Chapter 10 Three-Dimensional Viewing Chapter 10 Three-Dimensional Viewing Part I. Overview of 3D Viewing Concept 3D Viewing Pipeline vs. OpenGL Pipeline 3D Viewing-Coordinate Parameters
Pinhole Camera Model 10/05/17. Computational Photography Derek Hoiem, University of Illinois
 Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
Smooth Key-framing using the Image Plane
 Washington University in St. Louis Washington University Open Scholarship All Computer Science and Engineering Research Computer Science and Engineering Report Number: WUCSE-2006-28 2006-01-01 Smooth Key-framing
Washington University in St. Louis Washington University Open Scholarship All Computer Science and Engineering Research Computer Science and Engineering Report Number: WUCSE-2006-28 2006-01-01 Smooth Key-framing
Introduction to 3D Concepts
 PART I Introduction to 3D Concepts Chapter 1 Scene... 3 Chapter 2 Rendering: OpenGL (OGL) and Adobe Ray Tracer (ART)...19 1 CHAPTER 1 Scene s0010 1.1. The 3D Scene p0010 A typical 3D scene has several
PART I Introduction to 3D Concepts Chapter 1 Scene... 3 Chapter 2 Rendering: OpenGL (OGL) and Adobe Ray Tracer (ART)...19 1 CHAPTER 1 Scene s0010 1.1. The 3D Scene p0010 A typical 3D scene has several
Three-Dimensional Viewing Hearn & Baker Chapter 7
 Three-Dimensional Viewing Hearn & Baker Chapter 7 Overview 3D viewing involves some tasks that are not present in 2D viewing: Projection, Visibility checks, Lighting effects, etc. Overview First, set up
Three-Dimensional Viewing Hearn & Baker Chapter 7 Overview 3D viewing involves some tasks that are not present in 2D viewing: Projection, Visibility checks, Lighting effects, etc. Overview First, set up
The Wireframe Update Buttons. The Frontface and Backface Buttons. The Project Designer 265
 The Wireframe Update Buttons The speed at which objects can be manipulated in the Project Designer viewport depends in part on the complexity of the object being moved. An object that is made up of many
The Wireframe Update Buttons The speed at which objects can be manipulated in the Project Designer viewport depends in part on the complexity of the object being moved. An object that is made up of many
CSE328 Fundamentals of Computer Graphics
 CSE328 Fundamentals of Computer Graphics Hong Qin State University of New York at Stony Brook (Stony Brook University) Stony Brook, New York 794--44 Tel: (63)632-845; Fax: (63)632-8334 qin@cs.sunysb.edu
CSE328 Fundamentals of Computer Graphics Hong Qin State University of New York at Stony Brook (Stony Brook University) Stony Brook, New York 794--44 Tel: (63)632-845; Fax: (63)632-8334 qin@cs.sunysb.edu
This is the opening view of blender.
 This is the opening view of blender. Note that interacting with Blender is a little different from other programs that you may be used to. For example, left clicking won t select objects on the scene,
This is the opening view of blender. Note that interacting with Blender is a little different from other programs that you may be used to. For example, left clicking won t select objects on the scene,
Stereoscopic Systems Part 1
 Stereoscopic Systems Part 1 Terminology: Stereoscopic vs. 3D 3D Animation refers to computer animation created with programs (like Maya) that manipulate objects in a 3D space, though the rendered image
Stereoscopic Systems Part 1 Terminology: Stereoscopic vs. 3D 3D Animation refers to computer animation created with programs (like Maya) that manipulate objects in a 3D space, though the rendered image
Drawing in 3D (viewing, projection, and the rest of the pipeline)
") Drawing in 3D (viewing, projection, and the rest of the pipeline) CS559 Spring 2017 Lecture 6 February 2, 2017 The first 4 Key Ideas 1. Work in convenient coordinate systems. Use transformations to get
Drawing in 3D (viewing, projection, and the rest of the pipeline) CS559 Spring 2017 Lecture 6 February 2, 2017 The first 4 Key Ideas 1. Work in convenient coordinate systems. Use transformations to get
Massachusetts Institute of Technology Department of Computer Science and Electrical Engineering 6.801/6.866 Machine Vision QUIZ II
 Massachusetts Institute of Technology Department of Computer Science and Electrical Engineering 6.801/6.866 Machine Vision QUIZ II Handed out: 001 Nov. 30th Due on: 001 Dec. 10th Problem 1: (a (b Interior
Massachusetts Institute of Technology Department of Computer Science and Electrical Engineering 6.801/6.866 Machine Vision QUIZ II Handed out: 001 Nov. 30th Due on: 001 Dec. 10th Problem 1: (a (b Interior
Blender Notes. Introduction to Digital Modelling and Animation in Design Blender Tutorial - week 1 The Blender Interface and Basic Shapes
 Blender Notes Introduction to Digital Modelling and Animation in Design Blender Tutorial - week 1 The Blender Interface and Basic Shapes Introduction Blender is a powerful modeling, animation and rendering
Blender Notes Introduction to Digital Modelling and Animation in Design Blender Tutorial - week 1 The Blender Interface and Basic Shapes Introduction Blender is a powerful modeling, animation and rendering
Stereo CSE 576. Ali Farhadi. Several slides from Larry Zitnick and Steve Seitz
 Stereo CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Why do we perceive depth? What do humans use as depth cues? Motion Convergence When watching an object close to us, our eyes
Stereo CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Why do we perceive depth? What do humans use as depth cues? Motion Convergence When watching an object close to us, our eyes
Getting Started with ShowcaseChapter1:
 Chapter 1 Getting Started with ShowcaseChapter1: In this chapter, you learn the purpose of Autodesk Showcase, about its interface, and how to import geometry and adjust imported geometry. Objectives After
Chapter 1 Getting Started with ShowcaseChapter1: In this chapter, you learn the purpose of Autodesk Showcase, about its interface, and how to import geometry and adjust imported geometry. Objectives After
Module 4F12: Computer Vision and Robotics Solutions to Examples Paper 2
 Engineering Tripos Part IIB FOURTH YEAR Module 4F2: Computer Vision and Robotics Solutions to Examples Paper 2. Perspective projection and vanishing points (a) Consider a line in 3D space, defined in camera-centered
Engineering Tripos Part IIB FOURTH YEAR Module 4F2: Computer Vision and Robotics Solutions to Examples Paper 2. Perspective projection and vanishing points (a) Consider a line in 3D space, defined in camera-centered
CS 354R: Computer Game Technology
 CS 354R: Computer Game Technology Texture and Environment Maps Fall 2018 Texture Mapping Problem: colors, normals, etc. are only specified at vertices How do we add detail between vertices without incurring
CS 354R: Computer Game Technology Texture and Environment Maps Fall 2018 Texture Mapping Problem: colors, normals, etc. are only specified at vertices How do we add detail between vertices without incurring
CSE528 Computer Graphics: Theory, Algorithms, and Applications
 CSE528 Computer Graphics: Theory, Algorithms, and Applications Hong Qin Stony Brook University (SUNY at Stony Brook) Stony Brook, New York 11794-2424 Tel: (631)632-845; Fax: (631)632-8334 qin@cs.stonybrook.edu
CSE528 Computer Graphics: Theory, Algorithms, and Applications Hong Qin Stony Brook University (SUNY at Stony Brook) Stony Brook, New York 11794-2424 Tel: (631)632-845; Fax: (631)632-8334 qin@cs.stonybrook.edu
Agenda. Rotations. Camera models. Camera calibration. Homographies
 Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Reading on the Accumulation Buffer: Motion Blur, Anti-Aliasing, and Depth of Field
 Reading on the Accumulation Buffer: Motion Blur, Anti-Aliasing, and Depth of Field 1 The Accumulation Buffer There are a number of effects that can be achieved if you can draw a scene more than once. You
Reading on the Accumulation Buffer: Motion Blur, Anti-Aliasing, and Depth of Field 1 The Accumulation Buffer There are a number of effects that can be achieved if you can draw a scene more than once. You
Transforming Objects in Inkscape Transform Menu. Move
 Transforming Objects in Inkscape Transform Menu Many of the tools for transforming objects are located in the Transform menu. (You can open the menu in Object > Transform, or by clicking SHIFT+CTRL+M.)
Transforming Objects in Inkscape Transform Menu Many of the tools for transforming objects are located in the Transform menu. (You can open the menu in Object > Transform, or by clicking SHIFT+CTRL+M.)
Single View Geometry. Camera model & Orientation + Position estimation. What am I?
 Single View Geometry Camera model & Orientation + Position estimation What am I? Vanishing point Mapping from 3D to 2D Point & Line Goal: Point Homogeneous coordinates represent coordinates in 2 dimensions
Single View Geometry Camera model & Orientation + Position estimation What am I? Vanishing point Mapping from 3D to 2D Point & Line Goal: Point Homogeneous coordinates represent coordinates in 2 dimensions
EXERCISE 2: MODELING MINOAN COLUMNS
 Minoan Column at the Palace of Minos, Crete CARLI Digital Collections EXERCISE 2: MODELING MINOAN COLUMNS ASSIGNMENT: In this exercise you will create an architectural element, a Minoan shaped column,
Minoan Column at the Palace of Minos, Crete CARLI Digital Collections EXERCISE 2: MODELING MINOAN COLUMNS ASSIGNMENT: In this exercise you will create an architectural element, a Minoan shaped column,
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 9- Animation Basics
 Timing, Moving, Rotating and Scaling Now that we know how to make stuff and make it look good, it s time to figure out how to move it around in your scene. Another name for an animation is Interpolation
Timing, Moving, Rotating and Scaling Now that we know how to make stuff and make it look good, it s time to figure out how to move it around in your scene. Another name for an animation is Interpolation
A Guide to Autodesk Maya 2015
 A Guide to Autodesk Maya 2015 Written by Mitchell Youngerman Table of Contents Layout of Toolbars...pg 1 Creating Objects...pg 2 Selecting & Deselecting Objects...pg 3 Changing Perspective... pg 4 Transforming
A Guide to Autodesk Maya 2015 Written by Mitchell Youngerman Table of Contents Layout of Toolbars...pg 1 Creating Objects...pg 2 Selecting & Deselecting Objects...pg 3 Changing Perspective... pg 4 Transforming
The Alice Scene Editor
 Facilitation Guide The Alice Scene Editor ( http://www.alice.org/resources/lessons/building-a-scene/ ) Summary This facilitation guide is intended to guide the instructor through the introduction of the
Facilitation Guide The Alice Scene Editor ( http://www.alice.org/resources/lessons/building-a-scene/ ) Summary This facilitation guide is intended to guide the instructor through the introduction of the
solidthinking User Interface
 Lesson 1 solidthinking User Interface This lesson introduces you to the solidthinking interface. The functions described represent the tools necessary for effectively managing the modeling of a project.
Lesson 1 solidthinking User Interface This lesson introduces you to the solidthinking interface. The functions described represent the tools necessary for effectively managing the modeling of a project.
Vision Review: Image Formation. Course web page:
 Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Tutorial 4: Texture Mapping Techniques
 Tutorial 4: Texture Mapping Techniques Completion time 40 minutes In the previous tutorial we learned how to create materials, and how to assign texture maps to those materials. In this tutorial we will
Tutorial 4: Texture Mapping Techniques Completion time 40 minutes In the previous tutorial we learned how to create materials, and how to assign texture maps to those materials. In this tutorial we will
LUMS Mine Detector Project
 LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
Getting Started. Extruding Features. Convert to feature class
 http://gmv.cast.uark.edu A Method Store for Advanced Survey and Modeling Technologies Mon, 01 Apr 2013 03:29:18 +0000 en-us hourly 1 http://wordpress.org/?v=3.5.1 http://gmv.cast.uark.edu/modeling/software-visualization/sketchup/workflow-sketchup/arcscene-tosketchup-to-arcscene/
http://gmv.cast.uark.edu A Method Store for Advanced Survey and Modeling Technologies Mon, 01 Apr 2013 03:29:18 +0000 en-us hourly 1 http://wordpress.org/?v=3.5.1 http://gmv.cast.uark.edu/modeling/software-visualization/sketchup/workflow-sketchup/arcscene-tosketchup-to-arcscene/
3D Vision Real Objects, Real Cameras. Chapter 11 (parts of), 12 (parts of) Computerized Image Analysis MN2 Anders Brun,
, 12 (parts of) Computerized Image Analysis MN2 Anders Brun,") 3D Vision Real Objects, Real Cameras Chapter 11 (parts of), 12 (parts of) Computerized Image Analysis MN2 Anders Brun, anders@cb.uu.se 3D Vision! Philisophy! Image formation " The pinhole camera " Projective
3D Vision Real Objects, Real Cameras Chapter 11 (parts of), 12 (parts of) Computerized Image Analysis MN2 Anders Brun, anders@cb.uu.se 3D Vision! Philisophy! Image formation " The pinhole camera " Projective
How to add video effects
 How to add video effects You can use effects to add a creative flair to your movie or to fix exposure or color problems, edit sound, or manipulate images. Adobe Premiere Elements comes with preset effects
How to add video effects You can use effects to add a creative flair to your movie or to fix exposure or color problems, edit sound, or manipulate images. Adobe Premiere Elements comes with preset effects
The Graphics Pipeline and OpenGL I: Transformations!
 ! The Graphics Pipeline and OpenGL I: Transformations! Gordon Wetzstein! Stanford University! EE 267 Virtual Reality! Lecture 2! stanford.edu/class/ee267/!! Albrecht Dürer, Underweysung der Messung mit
! The Graphics Pipeline and OpenGL I: Transformations! Gordon Wetzstein! Stanford University! EE 267 Virtual Reality! Lecture 2! stanford.edu/class/ee267/!! Albrecht Dürer, Underweysung der Messung mit
Draw Guide. Chapter 7 Working with 3D Objects
 Draw Guide Chapter 7 Working with 3D Objects Copyright This document is Copyright 2011 2014 by the LibreOffice Documentation Team. Contributors are listed below. You may distribute or modify it under the
Draw Guide Chapter 7 Working with 3D Objects Copyright This document is Copyright 2011 2014 by the LibreOffice Documentation Team. Contributors are listed below. You may distribute or modify it under the
Viewing. Part II (The Synthetic Camera) CS123 INTRODUCTION TO COMPUTER GRAPHICS. Andries van Dam 10/10/2017 1/31
 CS123 INTRODUCTION TO COMPUTER GRAPHICS. Andries van Dam 10/10/2017 1/31") Viewing Part II (The Synthetic Camera) Brownie camera courtesy of http://www.geh.org/fm/brownie2/htmlsrc/me13000034_ful.html 1/31 The Camera and the Scene } What does a camera do? } Takes in a 3D scene
Viewing Part II (The Synthetic Camera) Brownie camera courtesy of http://www.geh.org/fm/brownie2/htmlsrc/me13000034_ful.html 1/31 The Camera and the Scene } What does a camera do? } Takes in a 3D scene