Further Graphics. A Brief Introduction to Computational Geometry
|
|
|
- Veronica Doyle
- 5 years ago
- Views:
Transcription

1 Further Graphics A Brief Introduction to Computational Geometry 1 Alex Benton, University of Cambridge alex@bentonian.com Supported in part by Google UK, Ltd

2 Terminology We ll be focusing on discrete (as opposed to continuous) representation of geometry; i.e., polygon meshes Edge: Non-manifold vs manifold Many rendering systems limit themselves to triangle meshes Many require that the mesh be manifold In a closed manifold polygon mesh: Exactly two triangles meet at each edge The faces meeting at each vertex belong to a single, connected loop of faces Non-manifold vertex In a manifold with boundary: At most two triangles meet at each edge The faces meeting at each vertex belong to a single, connected strip of faces Vertex: Good boundary vs bad This slide draws much inspiration from Shirley and Marschner s Fundamentals of Computer Graphics, pp


3 Terminology We say that a surface is oriented if: a. the vertices of every face are stored in a fixed order b. if vertices i, j appear in both faces f1 and f2, then the vertices appear in order i, j in one and j, i in the other We say that a surface is embedded if, informally, nothing pokes through : a. No vertex, edge or face shares any point in space with any other vertex, edge or face except where dictated by the data structure of the polygon mesh A closed, embedded surface must separate 3-space into two parts: a bounded interior and an unbounded exterior. A cube with anti-clockwise oriented faces Klein bottle: not an embedded surface. Also, terrible for holding drinks. This slide draws much inspiration from Hughes and Van Dam s Computer Graphics: Principles and Practice, pp
 vectors from P to the set of points in S at a distance r from P as r goes to zero. [Excluding orientation.")
4 Normal at a vertex Expressed as a limit, The normal of surface S at point P is the limit of the cross-product between two (non-collinear) vectors from P to the set of points in S at a distance r from P as r goes to zero. [Excluding orientation.] 4
5 Normal at a vertex Using the limit definition, is the normal to a discrete surface necessarily a vector? The normal to the surface at any point on a face is a constant vector. The normal to the surface at any edge is an arc swept out on a unit sphere between the two normals of the two faces. The normal to the surface at a vertex is a space swept out on the unit sphere between the normals of all of the adjacent faces. 5
6 Finding the normal at a vertex Take the weighted average of the normals of surrounding polygons, weighted by each polygon s face angle at the vertex NF Face angle: the angle α formed at the vertex v by the vectors to the next and previous vertices in the face F Note: In this equation, arccos implies a convex polygon. Why? 6




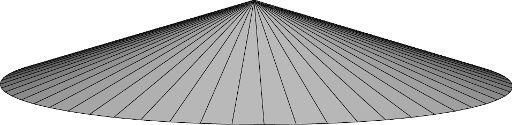
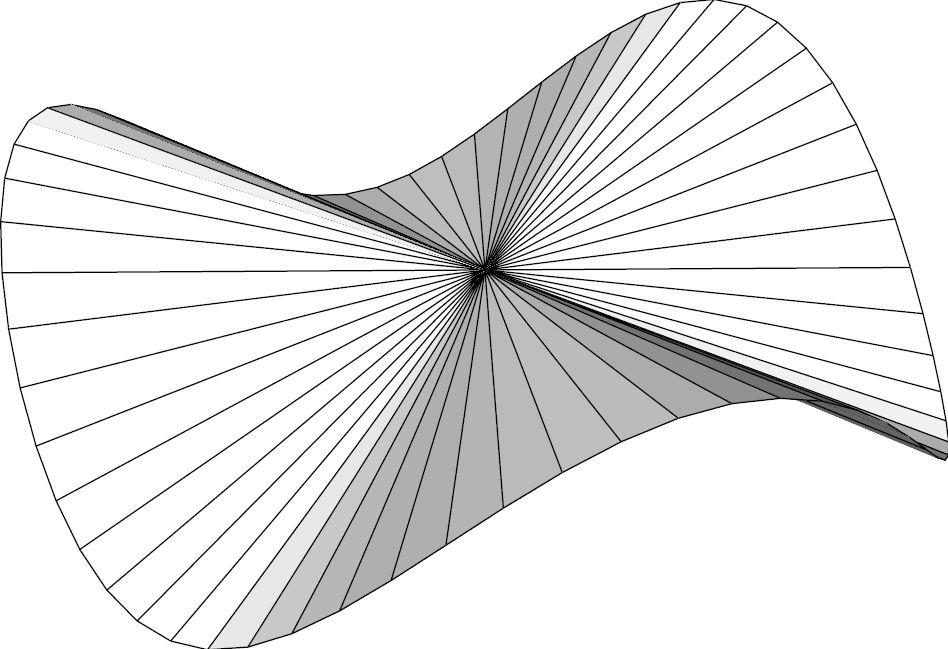
7 Gaussian curvature on smooth surfaces Informally speaking, the curvature of a surface expresses how flat the surface isn t. One can measure the directions in which the surface is curving most; these are the directions of principal curvature, k1 and k2. The product of k1 and k2 is the scalar Gaussian curvature. Image by Eric Gaba, from Wikipedia 7

8 Gaussian curvature on smooth surfaces Formally, the Gaussian curvature of a region on a surface is the ratio between the area of the surface of the unit sphere swept out by the normals of that region and the area of the region itself. The Gaussian curvature of a point is the limit of this ratio as the region tends to zero area. aswept as Area on the surface 0 on a plane Area of the projections of the normals on the unit sphere aswept r-2 on a sphere of radius r as (please pretend that this is a sphere) 8
9 Gaussian curvature on discrete surfaces On a discrete surface, normals do not vary smoothly: the normal to a face is constant on the face, and at edges and vertices the normal is strictly speaking undefined. Normals change instantaneously (as one's point of view travels across an edge from one face to another) or not at all (as one's point of view travels within a face.) The Gaussian curvature of the surface of any polyhedral mesh is zero everywhere except at the vertices, where it is infinite. 9
10 Angle deficit a better solution for measuring discrete curvature The angle deficit AD(v) of a vertex v is defined to be two π minus the sum of the face angles of the adjacent faces AD(v) = =



11 Angle deficit High angle deficit Low angle deficit Negative angle deficit 11



12 Angle deficit Hmmm 12


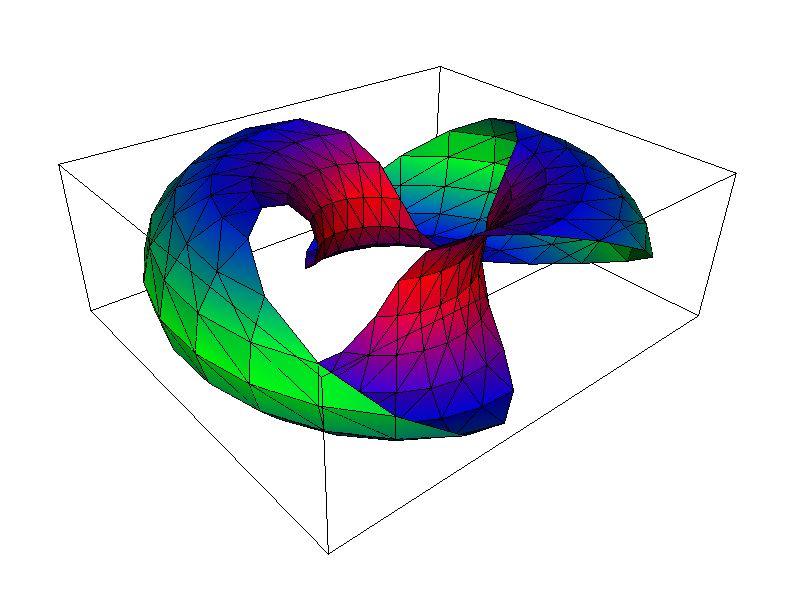
13 Genus, Poincaré and the Euler Characteristic Formally, the genus g of a closed surface is... a topologically invariant property of a surface defined as the largest number of nonintersecting simple closed curves that can be drawn on the surface without separating it. --mathworld.com Genus 0 Genus 1 Informally, it s the number of coffee cup handles in the surface. 13
14 Genus, Poincaré and the Euler Characteristic Given a polyhedral surface S without border where: V = the number of vertices of S, E = the number of edges between those vertices, F = the number of faces between those edges, χ is the Euler Characteristic of the surface, the Poincaré Formula states that: 14


15 Genus, Poincaré and the Euler Characteristic 4 faces ces 3 fa g=0 E = 12 F=6 V=8 V-E+F = 2-2g = 2 g=0 E = 15 F=7 V = 10 V-E+F = 2-2g = 2 g=1 E = 24 F = 12 V = 12 V-E+F = 2-2g = 0 15
16 The Euler Characteristic and angle deficit Descartes Theorem of Total Angle Deficit states that on a surface S with Euler characteristic χ, the sum of the angle deficits of the vertices is 2πχ: Cube: χ = 2-2g = 2 AD(v) = π/2 8(π/2) = 4π = 2πχ Tetrahedron: χ = 2-2g = 2 AD(v) = π 4(π) = 4π = 2πχ 16
17 A B The Jordan curve theorem Any simple closed curve C divides the points of the plane not on C into two distinct domains (with no points in common) of which C is the common boundary. C First stated (but proved incorrectly) by Camille Jordan ( ) in his Cours d'analyse. Sketch of proof : (For full proof see Courant & Robbins, 1941.) Show that any point in A can be joined to any other point in A by a path which does not cross C, and likewise for B. Show that any path connecting a point in A to a point in B must cross C. 17
18 The Jordan curve theorem on a sphere Note that the Jordan curve theorem can be extended to a curve on a sphere, or anything which is topologically equivalent to a sphere. Any simple closed curve on a sphere separates the surface of the sphere into two distinct regions. A B 18
19 Voronoi diagrams The Voronoi diagram(2) of a set of points Pi divides space into cells, where each cell Ci contains the points in space closer to Pi than any other Pj. The Delaunay triangulation is the dual of the Voronoi diagram: a graph in which an edge connects every Pi which share a common edge in the Voronoi diagram. (2) AKA Voronoi tesselation, Dirichelet domain, Thiessen polygons, plesiohedra, fundamental areas, domain of action A Voronoi diagram (dotted lines) and its dual Delaunay triangulation (solid). 19

20 Voronoi diagrams Given a set S={p1,p2,,pn}, the formal definition of a Voronoi cell C(S,pi) is C(S,pi)={p є Rd p-pi < p-pj, i j} The pi are called the generating points of the diagram. Where three or more boundary edges meet is a Voronoi point. Each Voronoi point is at the center of a circle (or sphere, or hypersphere ) which passes through the associated generating points and which is guaranteed to be empty of all other generating points. Delaunay triangulation applet by Paul Chew
21 Delaunay triangulations and equi-angularity The equiangularity of any triangulation of a set of points S is a sorted list of the angles (α1 α3t) of the triangles. A triangulation is said to be equiangular if it possesses lexicographically largest equiangularity amongst all possible triangulations of S. The Delaunay triangulation is equiangular. Image from Handbook of Computational Geometry (2000) Jörg-Rüdiger Sack and Jorge Urrutia, p
22 Delaunay triangulations and empty circles Voronoi triangulations have the empty circle property: in any Voronoi triangulation of S, no point of S will lie inside the circle circumscribing any three points sharing a triangle in the Voronoi diagram. Image from Handbook of Computational Geometry (2000) Jörg-Rüdiger Sack and Jorge Urrutia, p
23 Delaunay triangulations and convex hulls The border of the Delaunay triangulation of a set of points is always convex. This is true in 2D, 3D, 4D The Delaunay triangulation of a set of points in Rn is the planar projection of a convex hull in Rn+1. Ex: from 2D (Pi={x,y}i), loft the points upwards, onto a parabola in 3D (P i={x,y,x2+y2}i). The resulting polyhedral mesh will still be convex in 3D. 23



24 Voronoi diagrams and the medial axis The medial axis of a surface is the set of all points within the surface equidistant to the two or more nearest points on the surface. This can be used to extract a skeleton of the surface, for (for example) path-planning solutions, surface deformation, and animation. Approximating the Medial Axis from the Voronoi Diagram with a Convergence Guarantee Tamal K. Dey, Wulue Zhao A Voronoi-Based Hybrid Motion Planner for Rigid Bodies M Foskey, M Garber, M Lin, DManocha Shape Deformation using a Skeleton to Drive Simplex Transformations IEEE Transaction on Visualization and Computer Graphics, Vol. 14, No. 3, May/June 2008, Page Han-Bing Yan, Shi-Min Hu, Ralph R Martin, and Yong-Liang Yang 24
25 Fortune s algorithm The algorithm maintains a sweep line and a beach line, a set of parabolas advancing left-to-right from each point. The beach line is the union of these parabolas. a. The intersection of each pair of parabolas is an edge of the voronoi diagram b. All data to the left of the beach line is known ; nothing to the right can change it c. The beach line is stored in a binary tree Maintain a queue of two classes of event: the addition of, or removal of, a parabola There are O(n) such events, so Fortune s algorithm is O(n log n) 25

:")

26 GPU-accelerated Voronoi Diagrams Brute force: For each pixel to be rendered on the GPU, search all points for the nearest point Elegant (and 2D only): Render each point as a discrete 3D cone in isometric projection, let z-buffering sort it out 26
27 References Gaussian Curvature: The Poincaré Formula: Jordan curves: R. Courant, H. Robbins, What is Mathematics?, Oxford University Press, Voronoi diagrams: M. de Berg, O. Cheong, M. van Kreveld, M. Overmars, Computational Geometry: Algorithms and Applications, Springer-Verlag,
Further Graphics. A Brief Introduction to Computational Geometry
 Further Graphics A Brief Introduction to Computational Geometry 1 Alex Benton, University of Cambridge alex@bentonian.com Supported in part by Google UK, Ltd Terminology We ll be focusing on discrete (as
Further Graphics A Brief Introduction to Computational Geometry 1 Alex Benton, University of Cambridge alex@bentonian.com Supported in part by Google UK, Ltd Terminology We ll be focusing on discrete (as
Advanced Graphics. Surfaces - Methods and Mathematics
 Advanced Graphics Surfaces - Methods and Mathematics 1 Alex Benton, University of Cambridge A.Benton@damtp.cam.ac.uk Supported in part by Google UK, Ltd Terminology We ll be focusing on discrete (as opposed
Advanced Graphics Surfaces - Methods and Mathematics 1 Alex Benton, University of Cambridge A.Benton@damtp.cam.ac.uk Supported in part by Google UK, Ltd Terminology We ll be focusing on discrete (as opposed
Advanced Graphics. Implicit Surfaces, Voxels, Voronoi Diagrams and Particle Systems
 Advanced Graphics Implicit Surfaces, Voxels, Voronoi Diagrams and Particle Systems Alex Benton, University of Cambridge A.Benton@damtp.cam.ac.uk Supported in part by Google UK, Ltd Implicit surfaces Implicit
Advanced Graphics Implicit Surfaces, Voxels, Voronoi Diagrams and Particle Systems Alex Benton, University of Cambridge A.Benton@damtp.cam.ac.uk Supported in part by Google UK, Ltd Implicit surfaces Implicit
CS S Lecture February 13, 2017
 CS 6301.008.18S Lecture February 13, 2017 Main topics are #Voronoi-diagrams, #Fortune. Quick Note about Planar Point Location Last week, I started giving a difficult analysis of the planar point location
CS 6301.008.18S Lecture February 13, 2017 Main topics are #Voronoi-diagrams, #Fortune. Quick Note about Planar Point Location Last week, I started giving a difficult analysis of the planar point location
Advanced Graphics. Triangulation with Voronoi Diagrams and Implicit Surfaces; Voxels, Particle Systems, and Clever Rendering Tricks
 Advanced Graphics Triangulation with Voronoi Diagrams and Implicit Surfaces; Voxels, Particle Systems, and Clever Rendering Tricks Alex Benton, University of Cambridge A.Benton@damtp.cam.ac.uk 1 Supported
Advanced Graphics Triangulation with Voronoi Diagrams and Implicit Surfaces; Voxels, Particle Systems, and Clever Rendering Tricks Alex Benton, University of Cambridge A.Benton@damtp.cam.ac.uk 1 Supported
VORONOI DIAGRAM PETR FELKEL. FEL CTU PRAGUE Based on [Berg] and [Mount]
![VORONOI DIAGRAM PETR FELKEL. FEL CTU PRAGUE Based on [Berg] and [Mount]](/thumbs/88/116547690.jpg "VORONOI DIAGRAM PETR FELKEL. FEL CTU PRAGUE Based on [Berg] and [Mount]") VORONOI DIAGRAM PETR FELKEL FEL CTU PRAGUE felkel@fel.cvut.cz https://cw.felk.cvut.cz/doku.php/courses/a4m39vg/start Based on [Berg] and [Mount] Version from 9.11.2017 Talk overview Definition and examples
VORONOI DIAGRAM PETR FELKEL FEL CTU PRAGUE felkel@fel.cvut.cz https://cw.felk.cvut.cz/doku.php/courses/a4m39vg/start Based on [Berg] and [Mount] Version from 9.11.2017 Talk overview Definition and examples
Surfaces: notes on Geometry & Topology
 Surfaces: notes on Geometry & Topology 1 Surfaces A 2-dimensional region of 3D space A portion of space having length and breadth but no thickness 2 Defining Surfaces Analytically... Parametric surfaces
Surfaces: notes on Geometry & Topology 1 Surfaces A 2-dimensional region of 3D space A portion of space having length and breadth but no thickness 2 Defining Surfaces Analytically... Parametric surfaces
Convex Hulls (3D) O Rourke, Chapter 4
 O Rourke, Chapter 4") Convex Hulls (3D) O Rourke, Chapter 4 Outline Polyhedra Polytopes Euler Characteristic (Oriented) Mesh Representation Polyhedra Definition: A polyhedron is a solid region in 3D space whose boundary is
Convex Hulls (3D) O Rourke, Chapter 4 Outline Polyhedra Polytopes Euler Characteristic (Oriented) Mesh Representation Polyhedra Definition: A polyhedron is a solid region in 3D space whose boundary is
Curvature Berkeley Math Circle January 08, 2013
 Curvature Berkeley Math Circle January 08, 2013 Linda Green linda@marinmathcircle.org Parts of this handout are taken from Geometry and the Imagination by John Conway, Peter Doyle, Jane Gilman, and Bill
Curvature Berkeley Math Circle January 08, 2013 Linda Green linda@marinmathcircle.org Parts of this handout are taken from Geometry and the Imagination by John Conway, Peter Doyle, Jane Gilman, and Bill
CS 532: 3D Computer Vision 14 th Set of Notes
 1 CS 532: 3D Computer Vision 14 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Triangulating
1 CS 532: 3D Computer Vision 14 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Triangulating
6.854J / J Advanced Algorithms Fall 2008
 MIT OpenCourseWare http://ocw.mit.edu 6.854J / 18.415J Advanced Algorithms Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 18.415/6.854 Advanced
MIT OpenCourseWare http://ocw.mit.edu 6.854J / 18.415J Advanced Algorithms Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 18.415/6.854 Advanced
Voronoi diagram and Delaunay triangulation
 Voronoi diagram and Delaunay triangulation Ioannis Emiris & Vissarion Fisikopoulos Dept. of Informatics & Telecommunications, University of Athens Computational Geometry, spring 2015 Outline 1 Voronoi
Voronoi diagram and Delaunay triangulation Ioannis Emiris & Vissarion Fisikopoulos Dept. of Informatics & Telecommunications, University of Athens Computational Geometry, spring 2015 Outline 1 Voronoi
How Do Computers Solve Geometric Problems? Sorelle Friedler, University of Maryland - College Park
 How Do Computers Solve Geometric Problems? Sorelle Friedler, University of Maryland - College Park http://www.cs.umd.edu/~sorelle Outline Introduction Algorithms Computational Geometry Art Museum Problem
How Do Computers Solve Geometric Problems? Sorelle Friedler, University of Maryland - College Park http://www.cs.umd.edu/~sorelle Outline Introduction Algorithms Computational Geometry Art Museum Problem
Advanced Algorithms Computational Geometry Prof. Karen Daniels. Fall, 2012
 UMass Lowell Computer Science 91.504 Advanced Algorithms Computational Geometry Prof. Karen Daniels Fall, 2012 Voronoi Diagrams & Delaunay Triangulations O Rourke: Chapter 5 de Berg et al.: Chapters 7,
UMass Lowell Computer Science 91.504 Advanced Algorithms Computational Geometry Prof. Karen Daniels Fall, 2012 Voronoi Diagrams & Delaunay Triangulations O Rourke: Chapter 5 de Berg et al.: Chapters 7,
Tutorial 3 Comparing Biological Shapes Patrice Koehl and Joel Hass
 Tutorial 3 Comparing Biological Shapes Patrice Koehl and Joel Hass University of California, Davis, USA http://www.cs.ucdavis.edu/~koehl/ims2017/ What is a shape? A shape is a 2-manifold with a Riemannian
Tutorial 3 Comparing Biological Shapes Patrice Koehl and Joel Hass University of California, Davis, USA http://www.cs.ucdavis.edu/~koehl/ims2017/ What is a shape? A shape is a 2-manifold with a Riemannian
Voronoi Diagrams in the Plane. Chapter 5 of O Rourke text Chapter 7 and 9 of course text
 Voronoi Diagrams in the Plane Chapter 5 of O Rourke text Chapter 7 and 9 of course text Voronoi Diagrams As important as convex hulls Captures the neighborhood (proximity) information of geometric objects
Voronoi Diagrams in the Plane Chapter 5 of O Rourke text Chapter 7 and 9 of course text Voronoi Diagrams As important as convex hulls Captures the neighborhood (proximity) information of geometric objects
CS 177 Homework 1. Julian Panetta. October 22, We want to show for any polygonal disk consisting of vertex set V, edge set E, and face set F:
 CS 177 Homework 1 Julian Panetta October, 009 1 Euler Characteristic 1.1 Polyhedral Formula We want to show for any polygonal disk consisting of vertex set V, edge set E, and face set F: V E + F = 1 First,
CS 177 Homework 1 Julian Panetta October, 009 1 Euler Characteristic 1.1 Polyhedral Formula We want to show for any polygonal disk consisting of vertex set V, edge set E, and face set F: V E + F = 1 First,
CMSC 425: Lecture 9 Geometric Data Structures for Games: Geometric Graphs Thursday, Feb 21, 2013
 CMSC 425: Lecture 9 Geometric Data Structures for Games: Geometric Graphs Thursday, Feb 21, 2013 Reading: Today s materials is presented in part in Computational Geometry: Algorithms and Applications (3rd
CMSC 425: Lecture 9 Geometric Data Structures for Games: Geometric Graphs Thursday, Feb 21, 2013 Reading: Today s materials is presented in part in Computational Geometry: Algorithms and Applications (3rd
Week 8 Voronoi Diagrams
 1 Week 8 Voronoi Diagrams 2 Voronoi Diagram Very important problem in Comp. Geo. Discussed back in 1850 by Dirichlet Published in a paper by Voronoi in 1908 3 Voronoi Diagram Fire observation towers: an
1 Week 8 Voronoi Diagrams 2 Voronoi Diagram Very important problem in Comp. Geo. Discussed back in 1850 by Dirichlet Published in a paper by Voronoi in 1908 3 Voronoi Diagram Fire observation towers: an
EULER S FORMULA AND THE FIVE COLOR THEOREM
 EULER S FORMULA AND THE FIVE COLOR THEOREM MIN JAE SONG Abstract. In this paper, we will define the necessary concepts to formulate map coloring problems. Then, we will prove Euler s formula and apply
EULER S FORMULA AND THE FIVE COLOR THEOREM MIN JAE SONG Abstract. In this paper, we will define the necessary concepts to formulate map coloring problems. Then, we will prove Euler s formula and apply
Planar Graphs. 1 Graphs and maps. 1.1 Planarity and duality
 Planar Graphs In the first half of this book, we consider mostly planar graphs and their geometric representations, mostly in the plane. We start with a survey of basic results on planar graphs. This chapter
Planar Graphs In the first half of this book, we consider mostly planar graphs and their geometric representations, mostly in the plane. We start with a survey of basic results on planar graphs. This chapter
3. Voronoi Diagrams. 3.1 Definitions & Basic Properties. Examples :
 3. Voronoi Diagrams Examples : 1. Fire Observation Towers Imagine a vast forest containing a number of fire observation towers. Each ranger is responsible for extinguishing any fire closer to her tower
3. Voronoi Diagrams Examples : 1. Fire Observation Towers Imagine a vast forest containing a number of fire observation towers. Each ranger is responsible for extinguishing any fire closer to her tower
CS Object Representation. Aditi Majumder, CS 112 Slide 1
 CS 112 - Object Representation Aditi Majumder, CS 112 Slide 1 What is Graphics? Modeling Computer representation of the 3D world Analysis For efficient rendering For catering the model to different applications..
CS 112 - Object Representation Aditi Majumder, CS 112 Slide 1 What is Graphics? Modeling Computer representation of the 3D world Analysis For efficient rendering For catering the model to different applications..
CAD & Computational Geometry Course plan
 Course plan Introduction Segment-Segment intersections Polygon Triangulation Intro to Voronoï Diagrams & Geometric Search Sweeping algorithm for Voronoï Diagrams 1 Voronoi Diagrams Voronoi Diagrams or
Course plan Introduction Segment-Segment intersections Polygon Triangulation Intro to Voronoï Diagrams & Geometric Search Sweeping algorithm for Voronoï Diagrams 1 Voronoi Diagrams Voronoi Diagrams or
CS133 Computational Geometry
 CS133 Computational Geometry Voronoi Diagram Delaunay Triangulation 5/17/2018 1 Nearest Neighbor Problem Given a set of points P and a query point q, find the closest point p P to q p, r P, dist p, q dist(r,
CS133 Computational Geometry Voronoi Diagram Delaunay Triangulation 5/17/2018 1 Nearest Neighbor Problem Given a set of points P and a query point q, find the closest point p P to q p, r P, dist p, q dist(r,
Euler Characteristic
 Euler Characteristic Rebecca Robinson May 15, 2007 Euler Characteristic Rebecca Robinson 1 PLANAR GRAPHS 1 Planar graphs v = 5, e = 4, f = 1 v e + f = 2 v = 6, e = 7, f = 3 v = 4, e = 6, f = 4 v e + f
Euler Characteristic Rebecca Robinson May 15, 2007 Euler Characteristic Rebecca Robinson 1 PLANAR GRAPHS 1 Planar graphs v = 5, e = 4, f = 1 v e + f = 2 v = 6, e = 7, f = 3 v = 4, e = 6, f = 4 v e + f
Outline of the presentation
 Surface Reconstruction Petra Surynková Charles University in Prague Faculty of Mathematics and Physics petra.surynkova@mff.cuni.cz Outline of the presentation My work up to now Surfaces of Building Practice
Surface Reconstruction Petra Surynková Charles University in Prague Faculty of Mathematics and Physics petra.surynkova@mff.cuni.cz Outline of the presentation My work up to now Surfaces of Building Practice
CMPS 3130/6130 Computational Geometry Spring Voronoi Diagrams. Carola Wenk. Based on: Computational Geometry: Algorithms and Applications
 CMPS 3130/6130 Computational Geometry Spring 2015 Voronoi Diagrams Carola Wenk Based on: Computational Geometry: Algorithms and Applications 2/19/15 CMPS 3130/6130 Computational Geometry 1 Voronoi Diagram
CMPS 3130/6130 Computational Geometry Spring 2015 Voronoi Diagrams Carola Wenk Based on: Computational Geometry: Algorithms and Applications 2/19/15 CMPS 3130/6130 Computational Geometry 1 Voronoi Diagram
Computational Geometry
 Computational Geometry 600.658 Convexity A set S is convex if for any two points p, q S the line segment pq S. S p S q Not convex Convex? Convexity A set S is convex if it is the intersection of (possibly
Computational Geometry 600.658 Convexity A set S is convex if for any two points p, q S the line segment pq S. S p S q Not convex Convex? Convexity A set S is convex if it is the intersection of (possibly
Other Voronoi/Delaunay Structures
 Other Voronoi/Delaunay Structures Overview Alpha hulls (a subset of Delaunay graph) Extension of Voronoi Diagrams Convex Hull What is it good for? The bounding region of a point set Not so good for describing
Other Voronoi/Delaunay Structures Overview Alpha hulls (a subset of Delaunay graph) Extension of Voronoi Diagrams Convex Hull What is it good for? The bounding region of a point set Not so good for describing
Delaunay Triangulations
 Delaunay Triangulations (slides mostly by Glenn Eguchi) Motivation: Terrains Set of data points A R 2 Height ƒ(p) defined at each point p in A How can we most naturally approximate height of points not
Delaunay Triangulations (slides mostly by Glenn Eguchi) Motivation: Terrains Set of data points A R 2 Height ƒ(p) defined at each point p in A How can we most naturally approximate height of points not
Fortune s Algorithm. Notes from the book by de Berg, Van Krevald, Overmars, and Schwarzkpf
 Notes from the book by de Berg, Van Krevald, Overmars, and Schwarzkpf Based on sweeping the plane with a horizontal line and computing the Voronoi diagram as the line sweeps Straight forward approach won
Notes from the book by de Berg, Van Krevald, Overmars, and Schwarzkpf Based on sweeping the plane with a horizontal line and computing the Voronoi diagram as the line sweeps Straight forward approach won
Euler s Theorem. Brett Chenoweth. February 26, 2013
 Euler s Theorem Brett Chenoweth February 26, 2013 1 Introduction This summer I have spent six weeks of my holidays working on a research project funded by the AMSI. The title of my project was Euler s
Euler s Theorem Brett Chenoweth February 26, 2013 1 Introduction This summer I have spent six weeks of my holidays working on a research project funded by the AMSI. The title of my project was Euler s
A Topologically Convex Vertex-Ununfoldable Polyhedron
 A Topologically Convex Vertex-Ununfoldable Polyhedron Zachary Abel 1 Erik D. Demaine 2 Martin L. Demaine 2 1 MIT Department of Mathematics 2 MIT CSAIL CCCG 2011 Abel, Demaine, and Demaine (MIT) A Vertex-Ununfoldable
A Topologically Convex Vertex-Ununfoldable Polyhedron Zachary Abel 1 Erik D. Demaine 2 Martin L. Demaine 2 1 MIT Department of Mathematics 2 MIT CSAIL CCCG 2011 Abel, Demaine, and Demaine (MIT) A Vertex-Ununfoldable
Shape Modeling and Geometry Processing
 252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
Log1 Contest Round 2 Theta Circles, Parabolas and Polygons. 4 points each
 Name: Units do not have to be included. 016 017 Log1 Contest Round Theta Circles, Parabolas and Polygons 4 points each 1 Find the value of x given that 8 x 30 Find the area of a triangle given that it
Name: Units do not have to be included. 016 017 Log1 Contest Round Theta Circles, Parabolas and Polygons 4 points each 1 Find the value of x given that 8 x 30 Find the area of a triangle given that it
274 Curves on Surfaces, Lecture 5
 274 Curves on Surfaces, Lecture 5 Dylan Thurston Notes by Qiaochu Yuan Fall 2012 5 Ideal polygons Previously we discussed three models of the hyperbolic plane: the Poincaré disk, the upper half-plane,
274 Curves on Surfaces, Lecture 5 Dylan Thurston Notes by Qiaochu Yuan Fall 2012 5 Ideal polygons Previously we discussed three models of the hyperbolic plane: the Poincaré disk, the upper half-plane,
COMPUTING CONSTRAINED DELAUNAY
 COMPUTING CONSTRAINED DELAUNAY TRIANGULATIONS IN THE PLANE By Samuel Peterson, University of Minnesota Undergraduate The Goal The Problem The Algorithms The Implementation Applications Acknowledgments
COMPUTING CONSTRAINED DELAUNAY TRIANGULATIONS IN THE PLANE By Samuel Peterson, University of Minnesota Undergraduate The Goal The Problem The Algorithms The Implementation Applications Acknowledgments
Computational Geometry
 Lecture 12: Lecture 12: Motivation: Terrains by interpolation To build a model of the terrain surface, we can start with a number of sample points where we know the height. Lecture 12: Motivation: Terrains
Lecture 12: Lecture 12: Motivation: Terrains by interpolation To build a model of the terrain surface, we can start with a number of sample points where we know the height. Lecture 12: Motivation: Terrains
Week 7 Convex Hulls in 3D
 1 Week 7 Convex Hulls in 3D 2 Polyhedra A polyhedron is the natural generalization of a 2D polygon to 3D 3 Closed Polyhedral Surface A closed polyhedral surface is a finite set of interior disjoint polygons
1 Week 7 Convex Hulls in 3D 2 Polyhedra A polyhedron is the natural generalization of a 2D polygon to 3D 3 Closed Polyhedral Surface A closed polyhedral surface is a finite set of interior disjoint polygons
Moore Catholic High School Math Department
 Moore Catholic High School Math Department Geometry Vocabulary The following is a list of terms and properties which are necessary for success in a Geometry class. You will be tested on these terms during
Moore Catholic High School Math Department Geometry Vocabulary The following is a list of terms and properties which are necessary for success in a Geometry class. You will be tested on these terms during
Glossary of dictionary terms in the AP geometry units
 Glossary of dictionary terms in the AP geometry units affine linear equation: an equation in which both sides are sums of terms that are either a number times y or a number times x or just a number [SlL2-D5]
Glossary of dictionary terms in the AP geometry units affine linear equation: an equation in which both sides are sums of terms that are either a number times y or a number times x or just a number [SlL2-D5]
High-Dimensional Computational Geometry. Jingbo Shang University of Illinois at Urbana-Champaign Mar 5, 2018
 High-Dimensional Computational Geometry Jingbo Shang University of Illinois at Urbana-Champaign Mar 5, 2018 Outline 3-D vector geometry High-D hyperplane intersections Convex hull & its extension to 3
High-Dimensional Computational Geometry Jingbo Shang University of Illinois at Urbana-Champaign Mar 5, 2018 Outline 3-D vector geometry High-D hyperplane intersections Convex hull & its extension to 3
(Discrete) Differential Geometry
 Differential Geometry") (Discrete) Differential Geometry Motivation Understand the structure of the surface Properties: smoothness, curviness, important directions How to modify the surface to change these properties What properties
(Discrete) Differential Geometry Motivation Understand the structure of the surface Properties: smoothness, curviness, important directions How to modify the surface to change these properties What properties
Lectures in Discrete Differential Geometry 3 Discrete Surfaces
 Lectures in Discrete Differential Geometry 3 Discrete Surfaces Etienne Vouga March 19, 2014 1 Triangle Meshes We will now study discrete surfaces and build up a parallel theory of curvature that mimics
Lectures in Discrete Differential Geometry 3 Discrete Surfaces Etienne Vouga March 19, 2014 1 Triangle Meshes We will now study discrete surfaces and build up a parallel theory of curvature that mimics
Voronoi diagrams Delaunay Triangulations. Pierre Alliez Inria
 Voronoi diagrams Delaunay Triangulations Pierre Alliez Inria Voronoi Diagram Voronoi Diagram Voronoi Diagram The collection of the non-empty Voronoi regions and their faces, together with their incidence
Voronoi diagrams Delaunay Triangulations Pierre Alliez Inria Voronoi Diagram Voronoi Diagram Voronoi Diagram The collection of the non-empty Voronoi regions and their faces, together with their incidence
Moore Catholic High School Math Department
 Moore Catholic High School Math Department Geometry Vocabulary The following is a list of terms and properties which are necessary for success in a Geometry class. You will be tested on these terms during
Moore Catholic High School Math Department Geometry Vocabulary The following is a list of terms and properties which are necessary for success in a Geometry class. You will be tested on these terms during
Bands: A Physical Data Structure to Represent Both Orientable and Non-Orientable 2-Manifold Meshes
 Bands: A Physical Data Structure to Represent Both Orientable and Non-Orientable 2-Manifold Meshes Abstract This paper presents a physical data structure to represent both orientable and non-orientable
Bands: A Physical Data Structure to Represent Both Orientable and Non-Orientable 2-Manifold Meshes Abstract This paper presents a physical data structure to represent both orientable and non-orientable
The radius for a regular polygon is the same as the radius of the circumscribed circle.
 Perimeter and Area The perimeter and area of geometric shapes are basic properties that we need to know. The more complex a shape is, the more complex the process can be in finding its perimeter and area.
Perimeter and Area The perimeter and area of geometric shapes are basic properties that we need to know. The more complex a shape is, the more complex the process can be in finding its perimeter and area.
Flavor of Computational Geometry. Convex Hull in 2D. Shireen Y. Elhabian Aly A. Farag University of Louisville
 Flavor of Computational Geometry Convex Hull in 2D Shireen Y. Elhabian Aly A. Farag University of Louisville February 2010 Agenda Introduction Definitions of Convexity and Convex Hulls Naïve Algorithms
Flavor of Computational Geometry Convex Hull in 2D Shireen Y. Elhabian Aly A. Farag University of Louisville February 2010 Agenda Introduction Definitions of Convexity and Convex Hulls Naïve Algorithms
Voronoi Diagram. Xiao-Ming Fu
 Voronoi Diagram Xiao-Ming Fu Outlines Introduction Post Office Problem Voronoi Diagram Duality: Delaunay triangulation Centroidal Voronoi tessellations (CVT) Definition Applications Algorithms Outlines
Voronoi Diagram Xiao-Ming Fu Outlines Introduction Post Office Problem Voronoi Diagram Duality: Delaunay triangulation Centroidal Voronoi tessellations (CVT) Definition Applications Algorithms Outlines
1. CONVEX POLYGONS. Definition. A shape D in the plane is convex if every line drawn between two points in D is entirely inside D.
 1. CONVEX POLYGONS Definition. A shape D in the plane is convex if every line drawn between two points in D is entirely inside D. Convex 6 gon Another convex 6 gon Not convex Question. Why is the third
1. CONVEX POLYGONS Definition. A shape D in the plane is convex if every line drawn between two points in D is entirely inside D. Convex 6 gon Another convex 6 gon Not convex Question. Why is the third
Computational Geometry. Algorithm Design (10) Computational Geometry. Convex Hull. Areas in Computational Geometry
 Computational Geometry. Convex Hull. Areas in Computational Geometry") Computational Geometry Algorithm Design (10) Computational Geometry Graduate School of Engineering Takashi Chikayama Algorithms formulated as geometry problems Broad application areas Computer Graphics,
Computational Geometry Algorithm Design (10) Computational Geometry Graduate School of Engineering Takashi Chikayama Algorithms formulated as geometry problems Broad application areas Computer Graphics,
VoroCrust: Simultaneous Surface Reconstruction and Volume Meshing with Voronoi cells
 VoroCrust: Simultaneous Surface Reconstruction and Volume Meshing with Voronoi cells Scott A. Mitchell (speaker), joint work with Ahmed H. Mahmoud, Ahmad A. Rushdi, Scott A. Mitchell, Ahmad Abdelkader
VoroCrust: Simultaneous Surface Reconstruction and Volume Meshing with Voronoi cells Scott A. Mitchell (speaker), joint work with Ahmed H. Mahmoud, Ahmad A. Rushdi, Scott A. Mitchell, Ahmad Abdelkader
Computational Geometry. Geometry Cross Product Convex Hull Problem Sweep Line Algorithm
 GEOMETRY COMP 321 McGill University These slides are mainly compiled from the following resources. - Professor Jaehyun Park slides CS 97SI - Top-coder tutorials. - Programming Challenges books. Computational
GEOMETRY COMP 321 McGill University These slides are mainly compiled from the following resources. - Professor Jaehyun Park slides CS 97SI - Top-coder tutorials. - Programming Challenges books. Computational
Voronoi Diagrams and Delaunay Triangulation slides by Andy Mirzaian (a subset of the original slides are used here)
") Voronoi Diagrams and Delaunay Triangulation slides by Andy Mirzaian (a subset of the original slides are used here) Voronoi Diagram & Delaunay Triangualtion Algorithms Divide-&-Conquer Plane Sweep Lifting
Voronoi Diagrams and Delaunay Triangulation slides by Andy Mirzaian (a subset of the original slides are used here) Voronoi Diagram & Delaunay Triangualtion Algorithms Divide-&-Conquer Plane Sweep Lifting
Planar Graphs and Surfaces. Graphs 2 1/58
 Planar Graphs and Surfaces Graphs 2 1/58 Last time we discussed the Four Color Theorem, which says that any map can be colored with at most 4 colors and not have two regions that share a border having
Planar Graphs and Surfaces Graphs 2 1/58 Last time we discussed the Four Color Theorem, which says that any map can be colored with at most 4 colors and not have two regions that share a border having
Course Number: Course Title: Geometry
 Course Number: 1206310 Course Title: Geometry RELATED GLOSSARY TERM DEFINITIONS (89) Altitude The perpendicular distance from the top of a geometric figure to its opposite side. Angle Two rays or two line
Course Number: 1206310 Course Title: Geometry RELATED GLOSSARY TERM DEFINITIONS (89) Altitude The perpendicular distance from the top of a geometric figure to its opposite side. Angle Two rays or two line
pine cone Ratio = 13:8 or 8:5
 Chapter 10: Introducing Geometry 10.1 Basic Ideas of Geometry Geometry is everywhere o Road signs o Carpentry o Architecture o Interior design o Advertising o Art o Science Understanding and appreciating
Chapter 10: Introducing Geometry 10.1 Basic Ideas of Geometry Geometry is everywhere o Road signs o Carpentry o Architecture o Interior design o Advertising o Art o Science Understanding and appreciating
1 Appendix to notes 2, on Hyperbolic geometry:
 1230, notes 3 1 Appendix to notes 2, on Hyperbolic geometry: The axioms of hyperbolic geometry are axioms 1-4 of Euclid, plus an alternative to axiom 5: Axiom 5-h: Given a line l and a point p not on l,
1230, notes 3 1 Appendix to notes 2, on Hyperbolic geometry: The axioms of hyperbolic geometry are axioms 1-4 of Euclid, plus an alternative to axiom 5: Axiom 5-h: Given a line l and a point p not on l,
Preferred directions for resolving the non-uniqueness of Delaunay triangulations
 Preferred directions for resolving the non-uniqueness of Delaunay triangulations Christopher Dyken and Michael S. Floater Abstract: This note proposes a simple rule to determine a unique triangulation
Preferred directions for resolving the non-uniqueness of Delaunay triangulations Christopher Dyken and Michael S. Floater Abstract: This note proposes a simple rule to determine a unique triangulation
Geometric Modeling Mortenson Chapter 11. Complex Model Construction
 Geometric Modeling 91.580.201 Mortenson Chapter 11 Complex Model Construction Topics Topology of Models Connectivity and other intrinsic properties Graph-Based Models Emphasize topological structure Boolean
Geometric Modeling 91.580.201 Mortenson Chapter 11 Complex Model Construction Topics Topology of Models Connectivity and other intrinsic properties Graph-Based Models Emphasize topological structure Boolean
7. The Gauss-Bonnet theorem
 7. The Gauss-Bonnet theorem 7.1 Hyperbolic polygons In Euclidean geometry, an n-sided polygon is a subset of the Euclidean plane bounded by n straight lines. Thus the edges of a Euclidean polygon are formed
7. The Gauss-Bonnet theorem 7.1 Hyperbolic polygons In Euclidean geometry, an n-sided polygon is a subset of the Euclidean plane bounded by n straight lines. Thus the edges of a Euclidean polygon are formed
A Flavor of Topology. Shireen Elhabian and Aly A. Farag University of Louisville January 2010
 A Flavor of Topology Shireen Elhabian and Aly A. Farag University of Louisville January 2010 In 1670 s I believe that we need another analysis properly geometric or linear, which treats place directly
A Flavor of Topology Shireen Elhabian and Aly A. Farag University of Louisville January 2010 In 1670 s I believe that we need another analysis properly geometric or linear, which treats place directly
GAUSS-BONNET FOR DISCRETE SURFACES
 GAUSS-BONNET FOR DISCRETE SURFACES SOHINI UPADHYAY Abstract. Gauss-Bonnet is a deep result in differential geometry that illustrates a fundamental relationship between the curvature of a surface and its
GAUSS-BONNET FOR DISCRETE SURFACES SOHINI UPADHYAY Abstract. Gauss-Bonnet is a deep result in differential geometry that illustrates a fundamental relationship between the curvature of a surface and its
Surface Mesh Generation
 Surface Mesh Generation J.-F. Remacle Université catholique de Louvain September 22, 2011 0 3D Model For the description of the mesh generation process, let us consider the CAD model of a propeller presented
Surface Mesh Generation J.-F. Remacle Université catholique de Louvain September 22, 2011 0 3D Model For the description of the mesh generation process, let us consider the CAD model of a propeller presented
Geometry Vocabulary Math Fundamentals Reference Sheet Page 1
 Math Fundamentals Reference Sheet Page 1 Acute Angle An angle whose measure is between 0 and 90 Acute Triangle A that has all acute Adjacent Alternate Interior Angle Two coplanar with a common vertex and
Math Fundamentals Reference Sheet Page 1 Acute Angle An angle whose measure is between 0 and 90 Acute Triangle A that has all acute Adjacent Alternate Interior Angle Two coplanar with a common vertex and
Tiling Three-Dimensional Space with Simplices. Shankar Krishnan AT&T Labs - Research
 Tiling Three-Dimensional Space with Simplices Shankar Krishnan AT&T Labs - Research What is a Tiling? Partition of an infinite space into pieces having a finite number of distinct shapes usually Euclidean
Tiling Three-Dimensional Space with Simplices Shankar Krishnan AT&T Labs - Research What is a Tiling? Partition of an infinite space into pieces having a finite number of distinct shapes usually Euclidean
Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder]
![Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder]](/thumbs/93/111713975.jpg "Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder]") Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder] Preliminaries Recall: Given a smooth function f:r R, the function
Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder] Preliminaries Recall: Given a smooth function f:r R, the function
Voronoi Diagrams and Delaunay Triangulations. O Rourke, Chapter 5
 Voronoi Diagrams and Delaunay Triangulations O Rourke, Chapter 5 Outline Preliminaries Properties and Applications Computing the Delaunay Triangulation Preliminaries Given a function f: R 2 R, the tangent
Voronoi Diagrams and Delaunay Triangulations O Rourke, Chapter 5 Outline Preliminaries Properties and Applications Computing the Delaunay Triangulation Preliminaries Given a function f: R 2 R, the tangent
SMMG September 16 th, 2006 featuring Dr. Jessica Purcell Geometry out of the Paper: An Introduction to Manifolds
 1. Explore a Cylinder SMMG September 16 th, 2006 featuring Dr. Jessica Purcell Geometry out of the Paper: An Introduction to Manifolds Take a strip of paper. Bring the two ends of the strip together to
1. Explore a Cylinder SMMG September 16 th, 2006 featuring Dr. Jessica Purcell Geometry out of the Paper: An Introduction to Manifolds Take a strip of paper. Bring the two ends of the strip together to
Outline. Visualization Discretization Sampling Quantization Representation Continuous Discrete. Noise
 Fundamentals Data Outline Visualization Discretization Sampling Quantization Representation Continuous Discrete Noise 2 Data Data : Function dependent on one or more variables. Example Audio (1D) - depends
Fundamentals Data Outline Visualization Discretization Sampling Quantization Representation Continuous Discrete Noise 2 Data Data : Function dependent on one or more variables. Example Audio (1D) - depends
Example: The following is an example of a polyhedron. Fill the blanks with the appropriate answer. Vertices:
 11.1: Space Figures and Cross Sections Polyhedron: solid that is bounded by polygons Faces: polygons that enclose a polyhedron Edge: line segment that faces meet and form Vertex: point or corner where
11.1: Space Figures and Cross Sections Polyhedron: solid that is bounded by polygons Faces: polygons that enclose a polyhedron Edge: line segment that faces meet and form Vertex: point or corner where
Lecture 3: Art Gallery Problems and Polygon Triangulation
 EECS 396/496: Computational Geometry Fall 2017 Lecture 3: Art Gallery Problems and Polygon Triangulation Lecturer: Huck Bennett In this lecture, we study the problem of guarding an art gallery (specified
EECS 396/496: Computational Geometry Fall 2017 Lecture 3: Art Gallery Problems and Polygon Triangulation Lecturer: Huck Bennett In this lecture, we study the problem of guarding an art gallery (specified
7 Voronoi Diagrams. The Post Office Problem
 7 Voronoi Diagrams The Post Office Problem Suppose you are on the advisory board for the planning of a supermarket chain, and there are plans to open a new branch at a certain location. To predict whether
7 Voronoi Diagrams The Post Office Problem Suppose you are on the advisory board for the planning of a supermarket chain, and there are plans to open a new branch at a certain location. To predict whether
Geometry - Chapter 1 - Corrective #1
 Class: Date: Geometry - Chapter 1 - Corrective #1 Short Answer 1. Sketch a figure that shows two coplanar lines that do not intersect, but one of the lines is the intersection of two planes. 2. Name two
Class: Date: Geometry - Chapter 1 - Corrective #1 Short Answer 1. Sketch a figure that shows two coplanar lines that do not intersect, but one of the lines is the intersection of two planes. 2. Name two
Lecture 16: Voronoi Diagrams and Fortune s Algorithm
 contains q changes as a result of the ith insertion. Let P i denote this probability (where the probability is taken over random insertion orders, irrespective of the choice of q). Since q could fall through
contains q changes as a result of the ith insertion. Let P i denote this probability (where the probability is taken over random insertion orders, irrespective of the choice of q). Since q could fall through
Möbius Transformations in Scientific Computing. David Eppstein
 Möbius Transformations in Scientific Computing David Eppstein Univ. of California, Irvine School of Information and Computer Science (including joint work with Marshall Bern from WADS 01 and SODA 03) Outline
Möbius Transformations in Scientific Computing David Eppstein Univ. of California, Irvine School of Information and Computer Science (including joint work with Marshall Bern from WADS 01 and SODA 03) Outline
CS 2336 Discrete Mathematics
 CS 2336 Discrete Mathematics Lecture 15 Graphs: Planar Graphs 1 Outline What is a Planar Graph? Euler Planar Formula Platonic Solids Five Color Theorem Kuratowski s Theorem 2 What is a Planar Graph? Definition
CS 2336 Discrete Mathematics Lecture 15 Graphs: Planar Graphs 1 Outline What is a Planar Graph? Euler Planar Formula Platonic Solids Five Color Theorem Kuratowski s Theorem 2 What is a Planar Graph? Definition
Chapter 8. Voronoi Diagrams. 8.1 Post Oce Problem
 Chapter 8 Voronoi Diagrams 8.1 Post Oce Problem Suppose there are n post oces p 1,... p n in a city. Someone who is located at a position q within the city would like to know which post oce is closest
Chapter 8 Voronoi Diagrams 8.1 Post Oce Problem Suppose there are n post oces p 1,... p n in a city. Someone who is located at a position q within the city would like to know which post oce is closest
Collision Detection. Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering
 RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
Manifolds. Chapter X. 44. Locally Euclidean Spaces
 Chapter X Manifolds 44. Locally Euclidean Spaces 44 1. Definition of Locally Euclidean Space Let n be a non-negative integer. A topological space X is called a locally Euclidean space of dimension n if
Chapter X Manifolds 44. Locally Euclidean Spaces 44 1. Definition of Locally Euclidean Space Let n be a non-negative integer. A topological space X is called a locally Euclidean space of dimension n if
On the maximum number of edges in plane graph with fixed exterior face degree
 On the maximum number of edges in plane graph with fixed exterior face degree arxiv:708.02024v [math.co] 7 Aug 207 Niran Abbas Ali a, Gek L. Chia b,e, Hazim Michman Trao c and Adem Kilicman d a,c,d Department
On the maximum number of edges in plane graph with fixed exterior face degree arxiv:708.02024v [math.co] 7 Aug 207 Niran Abbas Ali a, Gek L. Chia b,e, Hazim Michman Trao c and Adem Kilicman d a,c,d Department
4.2 Simplicial Homology Groups
 4.2. SIMPLICIAL HOMOLOGY GROUPS 93 4.2 Simplicial Homology Groups 4.2.1 Simplicial Complexes Let p 0, p 1,... p k be k + 1 points in R n, with k n. We identify points in R n with the vectors that point
4.2. SIMPLICIAL HOMOLOGY GROUPS 93 4.2 Simplicial Homology Groups 4.2.1 Simplicial Complexes Let p 0, p 1,... p k be k + 1 points in R n, with k n. We identify points in R n with the vectors that point
Basics of Combinatorial Topology
 Chapter 7 Basics of Combinatorial Topology 7.1 Simplicial and Polyhedral Complexes In order to study and manipulate complex shapes it is convenient to discretize these shapes and to view them as the union
Chapter 7 Basics of Combinatorial Topology 7.1 Simplicial and Polyhedral Complexes In order to study and manipulate complex shapes it is convenient to discretize these shapes and to view them as the union
CS 468 (Spring 2013) Discrete Differential Geometry
 Discrete Differential Geometry") CS 468 (Spring 2013) Discrete Differential Geometry 1 Math Review Lecture 14 15 May 2013 Discrete Exterior Calculus Lecturer: Justin Solomon Scribe: Cassidy Saenz Before we dive into Discrete Exterior
CS 468 (Spring 2013) Discrete Differential Geometry 1 Math Review Lecture 14 15 May 2013 Discrete Exterior Calculus Lecturer: Justin Solomon Scribe: Cassidy Saenz Before we dive into Discrete Exterior
INTRODUCTION TO THE HOMOLOGY GROUPS OF COMPLEXES
 INTRODUCTION TO THE HOMOLOGY GROUPS OF COMPLEXES RACHEL CARANDANG Abstract. This paper provides an overview of the homology groups of a 2- dimensional complex. It then demonstrates a proof of the Invariance
INTRODUCTION TO THE HOMOLOGY GROUPS OF COMPLEXES RACHEL CARANDANG Abstract. This paper provides an overview of the homology groups of a 2- dimensional complex. It then demonstrates a proof of the Invariance
Chapter 12 and 11.1 Planar graphs, regular polyhedra, and graph colorings
 Chapter 12 and 11.1 Planar graphs, regular polyhedra, and graph colorings Prof. Tesler Math 184A Fall 2017 Prof. Tesler Ch. 12: Planar Graphs Math 184A / Fall 2017 1 / 45 12.1 12.2. Planar graphs Definition
Chapter 12 and 11.1 Planar graphs, regular polyhedra, and graph colorings Prof. Tesler Math 184A Fall 2017 Prof. Tesler Ch. 12: Planar Graphs Math 184A / Fall 2017 1 / 45 12.1 12.2. Planar graphs Definition
Computer Graphics 1. Chapter 2 (May 19th, 2011, 2-4pm): 3D Modeling. LMU München Medieninformatik Andreas Butz Computergraphik 1 SS2011
: 3D Modeling. LMU München Medieninformatik Andreas Butz Computergraphik 1 SS2011") Computer Graphics 1 Chapter 2 (May 19th, 2011, 2-4pm): 3D Modeling 1 The 3D rendering pipeline (our version for this class) 3D models in model coordinates 3D models in world coordinates 2D Polygons in
Computer Graphics 1 Chapter 2 (May 19th, 2011, 2-4pm): 3D Modeling 1 The 3D rendering pipeline (our version for this class) 3D models in model coordinates 3D models in world coordinates 2D Polygons in
THE DNA INEQUALITY POWER ROUND
 THE DNA INEQUALITY POWER ROUND Instructions Write/draw all solutions neatly, with at most one question per page, clearly numbered. Turn in the solutions in numerical order, with your team name at the upper
THE DNA INEQUALITY POWER ROUND Instructions Write/draw all solutions neatly, with at most one question per page, clearly numbered. Turn in the solutions in numerical order, with your team name at the upper
In what follows, we will focus on Voronoi diagrams in Euclidean space. Later, we will generalize to other distance spaces.
 Voronoi Diagrams 4 A city builds a set of post offices, and now needs to determine which houses will be served by which office. It would be wasteful for a postman to go out of their way to make a delivery
Voronoi Diagrams 4 A city builds a set of post offices, and now needs to determine which houses will be served by which office. It would be wasteful for a postman to go out of their way to make a delivery
Curriki Geometry Glossary
 Curriki Geometry Glossary The following terms are used throughout the Curriki Geometry projects and represent the core vocabulary and concepts that students should know to meet Common Core State Standards.
Curriki Geometry Glossary The following terms are used throughout the Curriki Geometry projects and represent the core vocabulary and concepts that students should know to meet Common Core State Standards.
Delaunay Triangulations. Presented by Glenn Eguchi Computational Geometry October 11, 2001
 Delaunay Triangulations Presented by Glenn Eguchi 6.838 Computational Geometry October 11, 2001 Motivation: Terrains Set of data points A R 2 Height ƒ(p) defined at each point p in A How can we most naturally
Delaunay Triangulations Presented by Glenn Eguchi 6.838 Computational Geometry October 11, 2001 Motivation: Terrains Set of data points A R 2 Height ƒ(p) defined at each point p in A How can we most naturally
Visibility: Finding the Staircase Kernel in Orthogonal Polygons
 Visibility: Finding the Staircase Kernel in Orthogonal Polygons 8 Visibility: Finding the Staircase Kernel in Orthogonal Polygons Tzvetalin S. Vassilev, Nipissing University, Canada Stefan Pape, Nipissing
Visibility: Finding the Staircase Kernel in Orthogonal Polygons 8 Visibility: Finding the Staircase Kernel in Orthogonal Polygons Tzvetalin S. Vassilev, Nipissing University, Canada Stefan Pape, Nipissing
2D Object Definition (1/3)
") 2D Object Definition (1/3) Lines and Polylines Lines drawn between ordered points to create more complex forms called polylines Same first and last point make closed polyline or polygon Can intersect itself
2D Object Definition (1/3) Lines and Polylines Lines drawn between ordered points to create more complex forms called polylines Same first and last point make closed polyline or polygon Can intersect itself
One simple example is that of a cube. Each face is a square (=regular quadrilateral) and each vertex is connected to exactly three squares.
 and each vertex is connected to exactly three squares.") Berkeley Math Circle Intermediate I, 1/23, 1/20, 2/6 Presenter: Elysée Wilson-Egolf Topic: Polygons, Polyhedra, Polytope Series Part 1 Polygon Angle Formula Let s start simple. How do we find the sum of
Berkeley Math Circle Intermediate I, 1/23, 1/20, 2/6 Presenter: Elysée Wilson-Egolf Topic: Polygons, Polyhedra, Polytope Series Part 1 Polygon Angle Formula Let s start simple. How do we find the sum of
Lecture 5 CLASSIFICATION OF SURFACES
 Lecture 5 CLASSIFICATION OF SURFACES In this lecture, we present the topological classification of surfaces. This will be done by a combinatorial argument imitating Morse theory and will make use of the
Lecture 5 CLASSIFICATION OF SURFACES In this lecture, we present the topological classification of surfaces. This will be done by a combinatorial argument imitating Morse theory and will make use of the
Lifting Transform, Voronoi, Delaunay, Convex Hulls
 Lifting Transform, Voronoi, Delaunay, Convex Hulls Subhash Suri Department of Computer Science University of California Santa Barbara, CA 93106 1 Lifting Transform (A combination of Pless notes and my
Lifting Transform, Voronoi, Delaunay, Convex Hulls Subhash Suri Department of Computer Science University of California Santa Barbara, CA 93106 1 Lifting Transform (A combination of Pless notes and my
25. How would you make the octahedral die shown below?
 304450_ch_08_enqxd 12/6/06 1:39 PM Page 577 Chapter Summary 577 draw others you will not necessarily need all of them. Describe your method, other than random trial and error. How confident are you that
304450_ch_08_enqxd 12/6/06 1:39 PM Page 577 Chapter Summary 577 draw others you will not necessarily need all of them. Describe your method, other than random trial and error. How confident are you that
Computer Aided Engineering Design Prof. Anupam Saxena Department of Mechanical Engineering Indian Institute of Technology, Kanpur.
 (Refer Slide Time: 00:28) Computer Aided Engineering Design Prof. Anupam Saxena Department of Mechanical Engineering Indian Institute of Technology, Kanpur Lecture - 6 Hello, this is lecture number 6 of
(Refer Slide Time: 00:28) Computer Aided Engineering Design Prof. Anupam Saxena Department of Mechanical Engineering Indian Institute of Technology, Kanpur Lecture - 6 Hello, this is lecture number 6 of