Option Driver Assistance. Product Information
|
|
|
- Aubrey Greene
- 5 years ago
- Views:
Transcription
1 Product Information
2 Table of Contents 1 Overview Introduction Features and Advantages Application Areas Further Information Functions Creating the Configuration for Object Verification Display and Evaluation Occupancy Grid Presentation in Video and GPS Window Calibration of the Camera Further Solutions for ADAS development Training... 7 V2.1 07/2018 Valid for CANape and vsignalyzer as of version
 autonomous interventions in the driving situation are made based on the results of object detection, such as the distance to the vehicle driving ahead.")
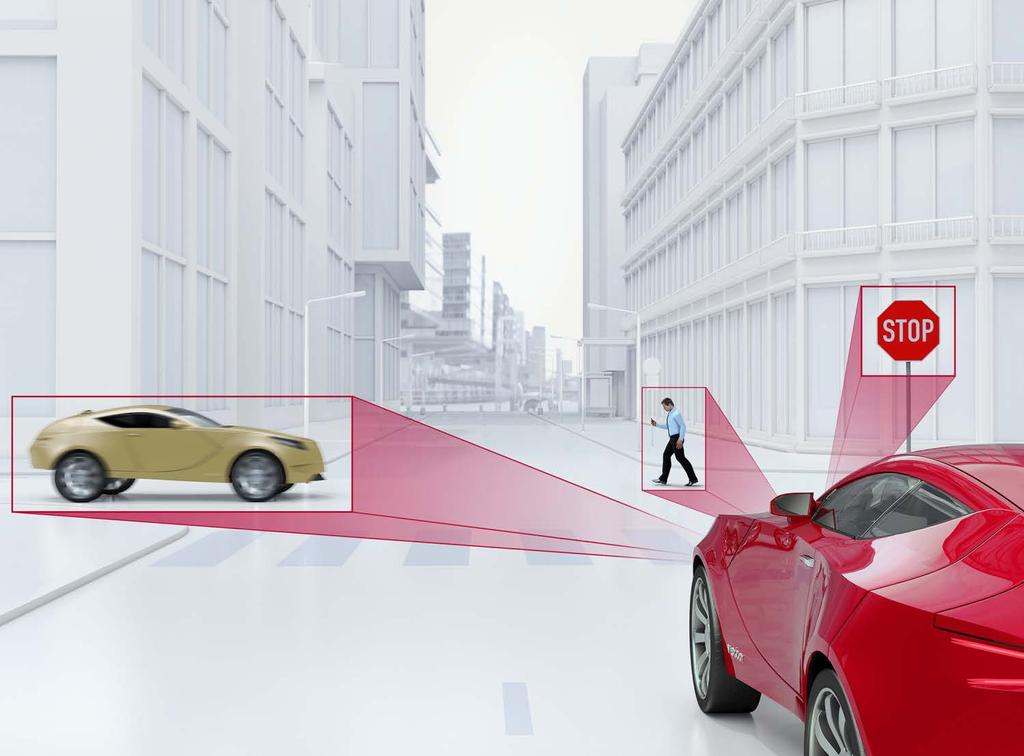
3 1 Overview 1.1 Introduction Driver assistance systems acquire information about the vehicle s environment via a wide variety of sensors such as video, radar, LIDAR, etc. Warnings to the driver or (semi-) autonomous interventions in the driving situation are made based on the results of object detection, such as the distance to the vehicle driving ahead. During the drive, measurement results are indeed available, but it is not so easy to verify them. Option Driver Assistance serves precisely this purpose. It enables the display of sensor data in the form of graphic elements such as rectangles and lines, or as point clouds. In CANape, the option may be used either during the measurement or for later evaluation of the measured data. In vsignalyzer, it is used to evaluate measured data offline. 1.2 Features and Advantages Option Driver Assistance displays objects acquired by the sensors of a driver assistance system in a video image of a reference camera that is recorded synchronous to the measurement. It is used for supplemental logging of the driving situation and is needed as verification of the sensor data. Based on object data computed by the ECU, geometric symbols or bitmaps are superimposed on the video image at specified points on the image. Verify the sensor s object recognition algorithms quickly and reliably by comparing recognized objects to the real environment. Figure 1: Evaluation of objective sensor data and subjective impressions during in-vehicle tests. Display of objects from bird s eye view and superimposed on the video image of the Multimedia Window. In the GPS window, you can display the associated position data and use it for evaluation purposes. Available map materials include OpenStreetMap and Shobunsha Super MappleG. In addition, graphic objects can be displayed in the GPS window. 3


4 Figure 2: Graphic objects are superimposed in GPS and Video window 1.3 Application Areas The flexible configuration capabilities of the Driver Assistance Option cover a wide range of application areas in the development of driver assistance systems. They can be used to: > Check object recognition algorithms for ACC (Adaptive Cruise Control), stop and go systems, and parking assistance systems with the help of object overlaying > Develop lane keeping systems or adaptive lighting for curves and display driving lanes as curves > Provide useful testing support of traffic sign recognition systems with linking of bitmaps Figure 3: Visualization of detected driving lanes and calculated trace as object overlay in video image and from bird s eye perspective. 4

5 1.4 Further Information Various documents are available online for CANape and vsignalyzer. With the demo versions, you get a detailed online Help function in which all functions are described. Examples of Option Driver Assistance are not available, however. Furthermore, you can benefit from valuable know-how in the form of technical articles, recorded webinars and application notes. For more information, go to the Vector Download-Center. 2 Functions The GFX Editor offers the convenience of associating detected sensor data (vehicles, road markings, traffic signs, etc.) with graphic elements (polygons for driving lane detection and rectangles for vehicle identification), which are displayed as overlays in the Video and GPS window. In addition, a user-scalable view is available in the Multimedia window. This window, known as the Grafx window, shows the objects from a user-configurable bird s eye perspective. In addition, image processing algorithms can be linked in the form of DLLs in CANape. Video inputs and outputs are gated via CANape. The results of the algorithm are visualized in CANape. This lets you optimize algorithm parameters like with an ECU in online operation. 3 Creating the Configuration for Object Verification The properties of objects to be displayed, i.e. the relationship between real objects and their display on the screen, are stored in the Object Signal Mapping file. This file contains the flexible mapping of all parameters, i.e. measurement variables and preset constant variables, to display objects (X, Y, Z coordinates, size, color, text and numeric fields, etc.). Numerous standardized, predefined symbolic objects such as occupancy grids, sensor fields, parking assist objects, crosses, squares, triangles, and lines are available for representing objects. Saved bitmaps may also be used to represent objects. For more intuitive evaluation of the display it is possible to combine individual objects into groups. The GFX Editor supports the user in creating and managing the object-signal mapping file. Figure 4: Using the GFX Editor to conveniently perform object-signal mapping and grouping for object display 5
 with variable grid")
6 4 Display and Evaluation Object data, which are either acquired as measured signals or exist as signals in measurement files, are shown as graphic elements and are superimposed on other information: > Perspective views and time-synchronous display of the evaluated object information in the video image > Continuously adjustable object display (from side view to bird s eye view) with variable grid size (X, Y, Z elongation) > To achieve an optimum display during the measurement or measured data evaluation, objects can simply be selected by numeric input (e.g. object numbers 1-5, 6, 8-10) or by preconfigured groups > Objects, texts, and parameter values can be drawn as supplemental information at fixed or variable pixel positions > Relative speed and lateral deviation can be displayed as horizontal and vertical excursion lines > Text and numeric information on the object can be shown in the display > Any desired zoom level in the Grafx window lets you display precisely that section that you need for your application > For easy checking of intervals and angles, they can be continuously calculated during the measurement and shown in the Grafx window > Subsequent adjustment of all object parameters (size, color, text and numeric fields, etc.) for measurement data evaluation > Measured data of the LIDAR sensors (e.g. Velodyne, Ibeo and Quanergy) are visualized in the Scene window which displays the received point cloud objects in 3D. A range of views and rotation and zoom mechanisms are available to permit optimum analysis. Figure 5: Reliably acquire LIDAR sensor data (e.g. Velodyne, Ibeo and Quanergy) and visualize it meaningfully as a point cloud 5 Occupancy Grid Presentation in Video and GPS Window For the development of autonomous vehicles, environment models of the vehicle's surroundings are required in the ECU. A frequently used model is the "Occupancy Grid". In this process, the environment is divided up into small sections and each section is assigned a probability that there is something in that section or not. For this purpose, sensor data from around the vehicle are merged by special algorithms and are evaluated. The result is the probability of an obstacle present at a clearly defined position in relation to the vehicle. The probability of presence is represented by a standardized numeric value. These data are saved in a two-dimensional characteristic diagram which reflects the environment. This is an enormously important factor for an autonomous vehicle in order to be able to make decisions on the potential for further travel in a direction. CANape handles Occupancy Grid measuring and processing using a 500 x 500 grid with one byte per grid point. By using color functions and the new Occupancy Grid overlapping object you visualize and validate the captured environment of the vehicle 6
7 as determined by the analysis algorithm of the ECU. For this purpose the Occupancy Grid can be displayed in the video window (three-dimensionally), in bird's eye view or in GPS window. 6 Calibration of the Camera To display object data from the ECU as geometric elements in the Video window, it is first necessary to execute a coordinate transformation from spatial coordinates to pixel positions. In Calibration mode, a grid like that of a chess board is superimposed over the reference camera image, and multiple images are generated. The coordinate transformation is then computed automatically. Fish-eye lenses are also supported here. The calibration procedure only needs to be performed once, provided that the system configuration (camera type and position) has not changed. 7 Further Solutions for ADAS development Vector offers comprehensive solutions for the various tasks involved in developing ADAS systems and systems for highly automated driving (HAD) in the form of software and hardware tools and embedded components: > From measuring instruments to acquire sensor data to complete ADAS logging solutions > Checking and optimizing ECU functions > Software components > Algorithm design vadasdeveloper provides an infrastructure for developing algorithms for advanced driver assistance systems (ADAS). The tool reduces your workload in developing sensor data fusion applications. The runtime environment acquires sensor data, logs it and can replay the data for stimulation. Here the sensor data and the results of algorithms are clearly displayed in a bird's eye perspective and in the video image. More information about Vector s ADAS solutions: 8 Training As part of our training program, we offer various workshops and training events in our classrooms. It is also possible to design customized training courses whose contents can be combined or extended to meet your expectations and of course they can be held at your business site if you wish. For additional information on individual training events and schedules on the Internet go to: 7
8 Get More Information Visit our website for: > News > Products > Demo software > Support > Training classes > Addresses
vsignalyzer Product Information
 Product Information Table of Contents 1 Overview... 3 1.1 Introduction... 3 1.2 Overview of Advantages... 3 1.3 Application Areas... 4 1.4 System Requirements... 4 1.5 Functional Extension by Additional
Product Information Table of Contents 1 Overview... 3 1.1 Introduction... 3 1.2 Overview of Advantages... 3 1.3 Application Areas... 4 1.4 System Requirements... 4 1.5 Functional Extension by Additional
Tooling Overview ADAS - Status & Ongoing Developments
 Tooling Overview ADAS - Status & Ongoing Developments Vector India Conference 2017 V0.1 2017-07-04 ADAS solution - Efficient development of multisensor applications Contents of Vector ADAS solution algorithm
Tooling Overview ADAS - Status & Ongoing Developments Vector India Conference 2017 V0.1 2017-07-04 ADAS solution - Efficient development of multisensor applications Contents of Vector ADAS solution algorithm
CANape Option Bypassing
 Product Information Table of Contents 1 Overview... 3 1.1 Introduction... 3 1.2 Overview of Advantages... 3 1.3 Application Areas... 4 1.4 System Requirement... 4 1.5 Further Information... 4 2 Functions...
Product Information Table of Contents 1 Overview... 3 1.1 Introduction... 3 1.2 Overview of Advantages... 3 1.3 Application Areas... 4 1.4 System Requirement... 4 1.5 Further Information... 4 2 Functions...
CANape. Product Information
 Product Information Table of Contents 1 Overview... 4 1.1 Introduction... 4 1.2 Overview of Advantages... 4 1.3 Application Areas... 5 1.4 Features... 5 1.5 System Requirements... 5 1.6 Supported Bus Interfaces
Product Information Table of Contents 1 Overview... 4 1.1 Introduction... 4 1.2 Overview of Advantages... 4 1.3 Application Areas... 5 1.4 Features... 5 1.5 System Requirements... 5 1.6 Supported Bus Interfaces
CANape. Product Information
 Product Information Table of Contents 1 Overview...4 1.1 Introduction...4 1.2 Overview of Advantages...4 1.3 Application Areas...5 1.4 Features...5 1.5 System Requirements...5 1.6 Supported Bus Interfaces
Product Information Table of Contents 1 Overview...4 1.1 Introduction...4 1.2 Overview of Advantages...4 1.3 Application Areas...5 1.4 Features...5 1.5 System Requirements...5 1.6 Supported Bus Interfaces
Measuring Everything. White Paper
 White Paper Table of Contents 1 Really Measuring Everything... 3 1.1 Measurement Concept in CANape... 5 1.2 Recorder PC Hardware... 6 2 Accessing Internal ECU Data... 6 2.1 Example: ECU... 9 2.2 Example:
White Paper Table of Contents 1 Really Measuring Everything... 3 1.1 Measurement Concept in CANape... 5 1.2 Recorder PC Hardware... 6 2 Accessing Internal ECU Data... 6 2.1 Example: ECU... 9 2.2 Example:
High Speed Measurement For ADAS And Fast Analysis
 High Speed Measurement For ADAS And Fast Analysis How to read that much data Measurement and Calibration User Day November 13 th 2018 V1.1 2018-11-09 ADAS Logging ADAS Logging Hardware and Software ADAS
High Speed Measurement For ADAS And Fast Analysis How to read that much data Measurement and Calibration User Day November 13 th 2018 V1.1 2018-11-09 ADAS Logging ADAS Logging Hardware and Software ADAS
Acoustic/Lidar Sensor Fusion for Car Tracking in City Traffic Scenarios
 Sensor Fusion for Car Tracking Acoustic/Lidar Sensor Fusion for Car Tracking in City Traffic Scenarios, Daniel Goehring 1 Motivation Direction to Object-Detection: What is possible with costefficient microphone
Sensor Fusion for Car Tracking Acoustic/Lidar Sensor Fusion for Car Tracking in City Traffic Scenarios, Daniel Goehring 1 Motivation Direction to Object-Detection: What is possible with costefficient microphone
CANoe.AFDX. Product Information
 Product Information Table of Contents 1 Introduction... 3 1.1 Overview of Advantages... 3 1.2 Application Areas... 3 1.3 Further Information... 3 2 Hardware Interfaces... 4 3 Symbolic Display via Databases...
Product Information Table of Contents 1 Introduction... 3 1.1 Overview of Advantages... 3 1.2 Application Areas... 3 1.3 Further Information... 3 2 Hardware Interfaces... 4 3 Symbolic Display via Databases...
CANalyzer.AFDX. Product Information
 Product Information Table of Contents 1 Introduction... 3 1.1 Overview of Advantages... 3 1.2 Application Areas... 3 1.3 Further Information... 3 2 Hardware Interfaces... 4 3 Symbolic Display via Databases...
Product Information Table of Contents 1 Introduction... 3 1.1 Overview of Advantages... 3 1.2 Application Areas... 3 1.3 Further Information... 3 2 Hardware Interfaces... 4 3 Symbolic Display via Databases...
Designing a software framework for automated driving. Dr.-Ing. Sebastian Ohl, 2017 October 12 th
 Designing a software framework for automated driving Dr.-Ing. Sebastian Ohl, 2017 October 12 th Challenges Functional software architecture with open interfaces and a set of well-defined software components
Designing a software framework for automated driving Dr.-Ing. Sebastian Ohl, 2017 October 12 th Challenges Functional software architecture with open interfaces and a set of well-defined software components
CANoe.Car2x. Product Information
 Product Information Table of Contents 1 Introduction... 3 1.1 Benefits at a Glance... 4 1.2 Application Areas... 4 1.3 Further Information... 6 2 Functions... 6 3 Hardware... 10 4 Training... 10 V1.5 02/2017
Product Information Table of Contents 1 Introduction... 3 1.1 Benefits at a Glance... 4 1.2 Application Areas... 4 1.3 Further Information... 6 2 Functions... 6 3 Hardware... 10 4 Training... 10 V1.5 02/2017
CANoe/CANalyzer.J1587
 Product Information Table of Contents 1 Introduction... 3 1.1 Application Areas... 3 1.2 Features and Advantages... 3 1.3 Further Information... 3 2 Functions... 4 3 Hardware Interfaces... 4 4 Protocol-specific
Product Information Table of Contents 1 Introduction... 3 1.1 Application Areas... 3 1.2 Features and Advantages... 3 1.3 Further Information... 3 2 Functions... 4 3 Hardware Interfaces... 4 4 Protocol-specific
SOLUTIONS FOR TESTING CAMERA-BASED ADVANCED DRIVER ASSISTANCE SYSTEMS SOLUTIONS FOR VIRTUAL TEST DRIVING
 SOLUTIONS FOR TESTING CAMERA-BASED ADVANCED DRIVER ASSISTANCE SYSTEMS SOLUTIONS FOR VIRTUAL TEST DRIVING Table of Contents Motivation... 3 Requirements... 3 Solutions at a Glance... 4 Video Data Stream...
SOLUTIONS FOR TESTING CAMERA-BASED ADVANCED DRIVER ASSISTANCE SYSTEMS SOLUTIONS FOR VIRTUAL TEST DRIVING Table of Contents Motivation... 3 Requirements... 3 Solutions at a Glance... 4 Video Data Stream...
Product Information CANalyzer.IP
 Product Information CANalyzer.IP Table of Contents 1 Introduction... 3 1.1 Overview of Advantages... 3 1.2 Application Areas... 3 1.3 Further Information... 4 2 Functions... 4 3 Hardware... 5 4 Remote
Product Information CANalyzer.IP Table of Contents 1 Introduction... 3 1.1 Overview of Advantages... 3 1.2 Application Areas... 3 1.3 Further Information... 4 2 Functions... 4 3 Hardware... 5 4 Remote
Advanced Driver Assistance: Modular Image Sensor Concept
 Vision Advanced Driver Assistance: Modular Image Sensor Concept Supplying value. Integrated Passive and Active Safety Systems Active Safety Passive Safety Scope Reduction of accident probability Get ready
Vision Advanced Driver Assistance: Modular Image Sensor Concept Supplying value. Integrated Passive and Active Safety Systems Active Safety Passive Safety Scope Reduction of accident probability Get ready
Solid State LiDAR for Ubiquitous 3D Sensing
 April 6, 2016 Solid State LiDAR for Ubiquitous 3D Sensing Louay Eldada, Ph.D. CEO, Co-founder Quanergy Systems New Paradigm in 3D Sensing Disruptive Technologies: Solid State 3D LiDAR sensors Embedded
April 6, 2016 Solid State LiDAR for Ubiquitous 3D Sensing Louay Eldada, Ph.D. CEO, Co-founder Quanergy Systems New Paradigm in 3D Sensing Disruptive Technologies: Solid State 3D LiDAR sensors Embedded
Towards Fully-automated Driving. tue-mps.org. Challenges and Potential Solutions. Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA
 Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, 1 postdoc, 1 project manager, 2 software engineers
Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, 1 postdoc, 1 project manager, 2 software engineers
High-End Datalogging System for Autonomus Driving V
 High-End Datalogging System for Autonomus Driving V1.0 2018-11-14 ADAS Logging Logging Concept for ADAS Level 1-2 Setup: Camera & Radar Same Supplier Log 2 Data Types: 1 Raw Data: Video / Radar 2 ECU Internal
High-End Datalogging System for Autonomus Driving V1.0 2018-11-14 ADAS Logging Logging Concept for ADAS Level 1-2 Setup: Camera & Radar Same Supplier Log 2 Data Types: 1 Raw Data: Video / Radar 2 ECU Internal
Optical Sensors: Key Technology for the Autonomous Car
 Optical Sensors: Key Technology for the Autonomous Car Rajeev Thakur, P.E., Product Marketing Manager, Infrared Business Unit, Osram Opto Semiconductors Autonomously driven cars will combine a variety
Optical Sensors: Key Technology for the Autonomous Car Rajeev Thakur, P.E., Product Marketing Manager, Infrared Business Unit, Osram Opto Semiconductors Autonomously driven cars will combine a variety
LPR and Traffic Analytics cameras installation guide. Technical Manual
 LPR and Traffic Analytics cameras installation guide Technical Manual p. 2 of 19 Purpose This document is addressed to clients and installers, and its purpose is to explain the hardware and installation
LPR and Traffic Analytics cameras installation guide Technical Manual p. 2 of 19 Purpose This document is addressed to clients and installers, and its purpose is to explain the hardware and installation
Sensory Augmentation for Increased Awareness of Driving Environment
 Sensory Augmentation for Increased Awareness of Driving Environment Pranay Agrawal John M. Dolan Dec. 12, 2014 Technologies for Safe and Efficient Transportation (T-SET) UTC The Robotics Institute Carnegie
Sensory Augmentation for Increased Awareness of Driving Environment Pranay Agrawal John M. Dolan Dec. 12, 2014 Technologies for Safe and Efficient Transportation (T-SET) UTC The Robotics Institute Carnegie
Fundamental Technologies Driving the Evolution of Autonomous Driving
 426 Hitachi Review Vol. 65 (2016), No. 9 Featured Articles Fundamental Technologies Driving the Evolution of Autonomous Driving Takeshi Shima Takeshi Nagasaki Akira Kuriyama Kentaro Yoshimura, Ph.D. Tsuneo
426 Hitachi Review Vol. 65 (2016), No. 9 Featured Articles Fundamental Technologies Driving the Evolution of Autonomous Driving Takeshi Shima Takeshi Nagasaki Akira Kuriyama Kentaro Yoshimura, Ph.D. Tsuneo
On Road Vehicle Detection using Shadows
 On Road Vehicle Detection using Shadows Gilad Buchman Grasp Lab, Department of Computer and Information Science School of Engineering University of Pennsylvania, Philadelphia, PA buchmag@seas.upenn.edu
On Road Vehicle Detection using Shadows Gilad Buchman Grasp Lab, Department of Computer and Information Science School of Engineering University of Pennsylvania, Philadelphia, PA buchmag@seas.upenn.edu
Calibration of a rotating multi-beam Lidar
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Calibration of a rotating multi-beam Lidar Naveed Muhammad 1,2 and Simon Lacroix 1,2 Abstract
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Calibration of a rotating multi-beam Lidar Naveed Muhammad 1,2 and Simon Lacroix 1,2 Abstract
Supplier Business Opportunities on ADAS and Autonomous Driving Technologies
 AUTOMOTIVE Supplier Business Opportunities on ADAS and Autonomous Driving Technologies 19 October 2016 Tokyo, Japan Masanori Matsubara, Senior Analyst, +81 3 6262 1734, Masanori.Matsubara@ihsmarkit.com
AUTOMOTIVE Supplier Business Opportunities on ADAS and Autonomous Driving Technologies 19 October 2016 Tokyo, Japan Masanori Matsubara, Senior Analyst, +81 3 6262 1734, Masanori.Matsubara@ihsmarkit.com
Pedestrian Detection Using Correlated Lidar and Image Data EECS442 Final Project Fall 2016
 edestrian Detection Using Correlated Lidar and Image Data EECS442 Final roject Fall 2016 Samuel Rohrer University of Michigan rohrer@umich.edu Ian Lin University of Michigan tiannis@umich.edu Abstract
edestrian Detection Using Correlated Lidar and Image Data EECS442 Final roject Fall 2016 Samuel Rohrer University of Michigan rohrer@umich.edu Ian Lin University of Michigan tiannis@umich.edu Abstract
CANoe.Ethernet. Product Information
 Product Information Table of Contents 1 Introduction... 3 1.1 Overview of Advantages... 3 1.2 Application Areas... 4 1.3 Further Information... 4 2 Functions... 4 3 Hardware... 5 4 Trainings... 5 5 Note...
Product Information Table of Contents 1 Introduction... 3 1.1 Overview of Advantages... 3 1.2 Application Areas... 4 1.3 Further Information... 4 2 Functions... 4 3 Hardware... 5 4 Trainings... 5 5 Note...
SYNCHRONOUS MULTIMEDIA AND VEHICLE DATA
 ViCANdo is an easy to use ADAS systems test and simulation environment that includes Ethernet, FlexRay, CAN, LIN, MOST as communication busses, as well as Video and sound analysis built for daily use for
ViCANdo is an easy to use ADAS systems test and simulation environment that includes Ethernet, FlexRay, CAN, LIN, MOST as communication busses, as well as Video and sound analysis built for daily use for
CANoe.J1939. Product Information
 Product Information Table of Contents 1 Introduction... 3 1.1 Application Areas... 3 1.2 Features and Advantages... 3 1.3 Further Information... 3 2 Functions... 4 3 Hardware Interfaces... 4 4 Transport
Product Information Table of Contents 1 Introduction... 3 1.1 Application Areas... 3 1.2 Features and Advantages... 3 1.3 Further Information... 3 2 Functions... 4 3 Hardware Interfaces... 4 4 Transport
ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning
 1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
CANalyzer.J1939. Product Information
 Product Information Table of Contents 1 Introduction... 3 1.1 Application Areas... 3 1.2 Features and Advantages... 3 1.3 Further Information... 3 2 Functions... 4 3 Hardware Interfaces... 4 4 Transport
Product Information Table of Contents 1 Introduction... 3 1.1 Application Areas... 3 1.2 Features and Advantages... 3 1.3 Further Information... 3 2 Functions... 4 3 Hardware Interfaces... 4 4 Transport
Reset Cursor Tool Clicking on the Reset Cursor tool will clear all map and tool selections and allow tooltips to be displayed.
 SMS Featured Icons: Mapping Toolbar This document includes a brief description of some of the most commonly used tools in the SMS Desktop Software map window toolbar as well as shows you the toolbar shortcuts
SMS Featured Icons: Mapping Toolbar This document includes a brief description of some of the most commonly used tools in the SMS Desktop Software map window toolbar as well as shows you the toolbar shortcuts
Measuring the World: Designing Robust Vehicle Localization for Autonomous Driving. Frank Schuster, Dr. Martin Haueis
 Measuring the World: Designing Robust Vehicle Localization for Autonomous Driving Frank Schuster, Dr. Martin Haueis Agenda Motivation: Why measure the world for autonomous driving? Map Content: What do
Measuring the World: Designing Robust Vehicle Localization for Autonomous Driving Frank Schuster, Dr. Martin Haueis Agenda Motivation: Why measure the world for autonomous driving? Map Content: What do
Vision based autonomous driving - A survey of recent methods. -Tejus Gupta
 Vision based autonomous driving - A survey of recent methods -Tejus Gupta Presently, there are three major paradigms for vision based autonomous driving: Directly map input image to driving action using
Vision based autonomous driving - A survey of recent methods -Tejus Gupta Presently, there are three major paradigms for vision based autonomous driving: Directly map input image to driving action using
Project Overview Mapping Technology Assessment for Connected Vehicle Highway Network Applications
 Project Overview Mapping Technology Assessment for Connected Vehicle Highway Network Applications ESRI International Users Conference July 2012 Table Of Contents Connected Vehicle Program Goals Mapping
Project Overview Mapping Technology Assessment for Connected Vehicle Highway Network Applications ESRI International Users Conference July 2012 Table Of Contents Connected Vehicle Program Goals Mapping
Communication Patterns in Safety Critical Systems for ADAS & Autonomous Vehicles Thorsten Wilmer Tech AD Berlin, 5. March 2018
 Communication Patterns in Safety Critical Systems for ADAS & Autonomous Vehicles Thorsten Wilmer Tech AD Berlin, 5. March 2018 Agenda Motivation Introduction of Safety Components Introduction to ARMv8
Communication Patterns in Safety Critical Systems for ADAS & Autonomous Vehicles Thorsten Wilmer Tech AD Berlin, 5. March 2018 Agenda Motivation Introduction of Safety Components Introduction to ARMv8
Design Considerations And The Impact of CMOS Image Sensors On The Car
 Design Considerations And The Impact of CMOS Image Sensors On The Car Intuitive Automotive Image Sensors To Promote Safer And Smarter Driving Micron Technology, Inc., has just introduced a new image sensor
Design Considerations And The Impact of CMOS Image Sensors On The Car Intuitive Automotive Image Sensors To Promote Safer And Smarter Driving Micron Technology, Inc., has just introduced a new image sensor
SignGO Pro // SignGO Lite Features Listing
 SignGO Pro // SignGO Lite Features Listing Features Design Text Entry SignGO Lite SignGO Pro Artistic Text Text On Arc Text On Path Frame Text AutoMerge Script Drawing Shape drawing Freehand drawing Logos
SignGO Pro // SignGO Lite Features Listing Features Design Text Entry SignGO Lite SignGO Pro Artistic Text Text On Arc Text On Path Frame Text AutoMerge Script Drawing Shape drawing Freehand drawing Logos
Aerial and Mobile LiDAR Data Fusion
 Creating Value Delivering Solutions Aerial and Mobile LiDAR Data Fusion Dr. Srini Dharmapuri, CP, PMP What You Will Learn About LiDAR Fusion Mobile and Aerial LiDAR Technology Components & Parameters Project
Creating Value Delivering Solutions Aerial and Mobile LiDAR Data Fusion Dr. Srini Dharmapuri, CP, PMP What You Will Learn About LiDAR Fusion Mobile and Aerial LiDAR Technology Components & Parameters Project
TEGRA K1 AND THE AUTOMOTIVE INDUSTRY. Gernot Ziegler, Timo Stich
 TEGRA K1 AND THE AUTOMOTIVE INDUSTRY Gernot Ziegler, Timo Stich Previously: Tegra in Automotive Infotainment / Navigation Digital Instrument Cluster Passenger Entertainment TEGRA K1 with Kepler GPU GPU:
TEGRA K1 AND THE AUTOMOTIVE INDUSTRY Gernot Ziegler, Timo Stich Previously: Tegra in Automotive Infotainment / Navigation Digital Instrument Cluster Passenger Entertainment TEGRA K1 with Kepler GPU GPU:
2 OVERVIEW OF RELATED WORK
 Utsushi SAKAI Jun OGATA This paper presents a pedestrian detection system based on the fusion of sensors for LIDAR and convolutional neural network based image classification. By using LIDAR our method
Utsushi SAKAI Jun OGATA This paper presents a pedestrian detection system based on the fusion of sensors for LIDAR and convolutional neural network based image classification. By using LIDAR our method
AUTOMATED GENERATION OF VIRTUAL DRIVING SCENARIOS FROM TEST DRIVE DATA
 F2014-ACD-014 AUTOMATED GENERATION OF VIRTUAL DRIVING SCENARIOS FROM TEST DRIVE DATA 1 Roy Bours (*), 1 Martijn Tideman, 2 Ulrich Lages, 2 Roman Katz, 2 Martin Spencer 1 TASS International, Rijswijk, The
F2014-ACD-014 AUTOMATED GENERATION OF VIRTUAL DRIVING SCENARIOS FROM TEST DRIVE DATA 1 Roy Bours (*), 1 Martijn Tideman, 2 Ulrich Lages, 2 Roman Katz, 2 Martin Spencer 1 TASS International, Rijswijk, The
Iwane Laboratories, Ltd.
 2011 Iwane Laboratories, Ltd. Introduction of a highly accurate threedimensional map making system termed as Map on 3D based on the IMS3 Dual Cam Map on 3D can detect three-dimensional shape of the road
2011 Iwane Laboratories, Ltd. Introduction of a highly accurate threedimensional map making system termed as Map on 3D based on the IMS3 Dual Cam Map on 3D can detect three-dimensional shape of the road
(a) (b) (c) Fig. 1. Omnidirectional camera: (a) principle; (b) physical construction; (c) captured. of a local vision system is more challenging than
 (b) (c) Fig. 1. Omnidirectional camera: (a) principle; (b) physical construction; (c) captured. of a local vision system is more challenging than") An Omnidirectional Vision System that finds and tracks color edges and blobs Felix v. Hundelshausen, Sven Behnke, and Raul Rojas Freie Universität Berlin, Institut für Informatik Takustr. 9, 14195 Berlin,
An Omnidirectional Vision System that finds and tracks color edges and blobs Felix v. Hundelshausen, Sven Behnke, and Raul Rojas Freie Universität Berlin, Institut für Informatik Takustr. 9, 14195 Berlin,
Detecting the Unexpected: The Path to Road Obstacles Prevention in Autonomous Driving
 Detecting the Unexpected: The Path to Road Obstacles Prevention in Autonomous Driving Shmoolik Mangan, PhD Algorithms Development Manager, VAYAVISION AutonomousTech TLV Israel 2018 VAYAVISION s approach
Detecting the Unexpected: The Path to Road Obstacles Prevention in Autonomous Driving Shmoolik Mangan, PhD Algorithms Development Manager, VAYAVISION AutonomousTech TLV Israel 2018 VAYAVISION s approach
ACTIVITYDETECTION 2.5
 ACTIVITYDETECTION 2.5 Configuration Revision 1 2018 ACIC sa/nv. All rights reserved. Document history Revision Date Comment 1 23/11/18 First revision for version 2.5 Target public This document is written
ACTIVITYDETECTION 2.5 Configuration Revision 1 2018 ACIC sa/nv. All rights reserved. Document history Revision Date Comment 1 23/11/18 First revision for version 2.5 Target public This document is written
Pattern Recognition for Autonomous. Pattern Recognition for Autonomous. Driving. Freie Universität t Berlin. Raul Rojas
 Pattern Recognition for Autonomous Pattern Recognition for Autonomous Driving Raul Rojas Freie Universität t Berlin FU Berlin Berlin 3d model from Berlin Partner Freie Universitaet Berlin Outline of the
Pattern Recognition for Autonomous Pattern Recognition for Autonomous Driving Raul Rojas Freie Universität t Berlin FU Berlin Berlin 3d model from Berlin Partner Freie Universitaet Berlin Outline of the
Why the Self-Driving Revolution Hinges on one Enabling Technology: LiDAR
 Why the Self-Driving Revolution Hinges on one Enabling Technology: LiDAR Markus Prison Director Business Development Europe Quanergy ID: 23328 Who We Are The leader in LiDAR (laser-based 3D spatial sensor)
Why the Self-Driving Revolution Hinges on one Enabling Technology: LiDAR Markus Prison Director Business Development Europe Quanergy ID: 23328 Who We Are The leader in LiDAR (laser-based 3D spatial sensor)
Real-Time Detection of Road Markings for Driving Assistance Applications
 Real-Time Detection of Road Markings for Driving Assistance Applications Ioana Maria Chira, Ancuta Chibulcutean Students, Faculty of Automation and Computer Science Technical University of Cluj-Napoca
Real-Time Detection of Road Markings for Driving Assistance Applications Ioana Maria Chira, Ancuta Chibulcutean Students, Faculty of Automation and Computer Science Technical University of Cluj-Napoca
EB TechPaper. Electronic horizon. Flexible implementation of predictive driver assistance features. automotive.elektrobit.com
 EB TechPaper Electronic horizon Flexible implementation of predictive driver assistance features automotive.elektrobit.com 1 Table of contents 1 Introduction 3 1.1 Standardization... 3 1.2 Architecture...
EB TechPaper Electronic horizon Flexible implementation of predictive driver assistance features automotive.elektrobit.com 1 Table of contents 1 Introduction 3 1.1 Standardization... 3 1.2 Architecture...
Failure Diagnosis and Prognosis for Automotive Systems. Tom Fuhrman General Motors R&D IFIP Workshop June 25-27, 2010
 Failure Diagnosis and Prognosis for Automotive Systems Tom Fuhrman General Motors R&D IFIP Workshop June 25-27, 2010 Automotive Challenges and Goals Driver Challenges Goals Energy Rising cost of petroleum
Failure Diagnosis and Prognosis for Automotive Systems Tom Fuhrman General Motors R&D IFIP Workshop June 25-27, 2010 Automotive Challenges and Goals Driver Challenges Goals Energy Rising cost of petroleum
Mobile Mapping and Navigation. Brad Kohlmeyer NAVTEQ Research
 Mobile Mapping and Navigation Brad Kohlmeyer NAVTEQ Research Mobile Mapping & Navigation Markets Automotive Enterprise Internet & Wireless Mobile Devices 2 Local Knowledge & Presence Used to Create Most
Mobile Mapping and Navigation Brad Kohlmeyer NAVTEQ Research Mobile Mapping & Navigation Markets Automotive Enterprise Internet & Wireless Mobile Devices 2 Local Knowledge & Presence Used to Create Most
Measurement Solution for new Radar Microcontroller V
 Measurement Solution for new Radar Microcontroller V1.01 2015-12-03 New Vehicle Architecture Technology Change E-Drive Cloud computing Autonomous driving Connectivity Security ECU less age Some ECU age
Measurement Solution for new Radar Microcontroller V1.01 2015-12-03 New Vehicle Architecture Technology Change E-Drive Cloud computing Autonomous driving Connectivity Security ECU less age Some ECU age
Vehicle Detection Using Gabor Filter
 Vehicle Detection Using Gabor Filter B.Sahayapriya 1, S.Sivakumar 2 Electronics and Communication engineering, SSIET, Coimbatore, Tamilnadu, India 1, 2 ABSTACT -On road vehicle detection is the main problem
Vehicle Detection Using Gabor Filter B.Sahayapriya 1, S.Sivakumar 2 Electronics and Communication engineering, SSIET, Coimbatore, Tamilnadu, India 1, 2 ABSTACT -On road vehicle detection is the main problem
DetectWORKS License Plate Recognition System. User Manual.
 DetectWORKS License Plate Recognition System. User Manual. Contents Overview...4 1. Installation Guide...5 1.1. Camera...5 1.1.1 Camera Model Choice...5 1.1.2 Camera mounting...5 1.1.3 Capture at night...6
DetectWORKS License Plate Recognition System. User Manual. Contents Overview...4 1. Installation Guide...5 1.1. Camera...5 1.1.1 Camera Model Choice...5 1.1.2 Camera mounting...5 1.1.3 Capture at night...6
> Acoustical feedback in the form of a beep with increasing urgency with decreasing distance to an obstacle
 PARKING ASSIST TESTING THE MEASURABLE DIFFERENCE. > Creation of complex 2-dimensional objects > Online distance calculations between moving and stationary objects > Creation of Automatic Points of Interest
PARKING ASSIST TESTING THE MEASURABLE DIFFERENCE. > Creation of complex 2-dimensional objects > Online distance calculations between moving and stationary objects > Creation of Automatic Points of Interest
TxDOT Video Analytics System User Manual
 TxDOT Video Analytics System User Manual Product 0-6432-P1 Published: August 2012 1 TxDOT VA System User Manual List of Figures... 3 1 System Overview... 4 1.1 System Structure Overview... 4 1.2 System
TxDOT Video Analytics System User Manual Product 0-6432-P1 Published: August 2012 1 TxDOT VA System User Manual List of Figures... 3 1 System Overview... 4 1.1 System Structure Overview... 4 1.2 System
CANoe 6.0. The Professional Development and Test Tool for CAN, LIN, MOST, FlexRay and J1587 TOOLS FOR NETWORKS AND DISTRIBUTED SYSTEMS
 CANoe 6.0 The Professional Development and Test Tool for CAN, LIN, MOST, FlexRay and J1587 CANoe is an all-round tool for the development, testing and analysis of networks and ECUs. It supports the user
CANoe 6.0 The Professional Development and Test Tool for CAN, LIN, MOST, FlexRay and J1587 CANoe is an all-round tool for the development, testing and analysis of networks and ECUs. It supports the user
Real-time-Data for Your Traffic Management System. smart eye TDS Traffic Data Sensor
 Real-time-Data for Your Traffic Management System smart eye TDS Traffic Data Sensor Date 1. 4. 2009 TECHNOLOGY OVERVIEW smart eye TDS Keeps traffic in the flow In future, automatic traffic control systems
Real-time-Data for Your Traffic Management System smart eye TDS Traffic Data Sensor Date 1. 4. 2009 TECHNOLOGY OVERVIEW smart eye TDS Keeps traffic in the flow In future, automatic traffic control systems
Image processing techniques for driver assistance. Razvan Itu June 2014, Technical University Cluj-Napoca
 Image processing techniques for driver assistance Razvan Itu June 2014, Technical University Cluj-Napoca Introduction Computer vision & image processing from wiki: any form of signal processing for which
Image processing techniques for driver assistance Razvan Itu June 2014, Technical University Cluj-Napoca Introduction Computer vision & image processing from wiki: any form of signal processing for which
Using Mobile LiDAR To Efficiently Collect Roadway Asset and Condition Data. Pierre-Paul Grondin, B.Sc. Surveying
 Using Mobile LiDAR To Efficiently Collect Roadway Asset and Condition Data Pierre-Paul Grondin, B.Sc. Surveying LIDAR (Light Detection and Ranging) The prevalent method to determine distance to an object
Using Mobile LiDAR To Efficiently Collect Roadway Asset and Condition Data Pierre-Paul Grondin, B.Sc. Surveying LIDAR (Light Detection and Ranging) The prevalent method to determine distance to an object
Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation
 Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation February 26, 2013 ESRA Fed. GIS Outline: Big picture: Positioning and
Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation February 26, 2013 ESRA Fed. GIS Outline: Big picture: Positioning and
Creating Affordable and Reliable Autonomous Vehicle Systems
 Creating Affordable and Reliable Autonomous Vehicle Systems Shaoshan Liu shaoshan.liu@perceptin.io Autonomous Driving Localization Most crucial task of autonomous driving Solutions: GNSS but withvariations,
Creating Affordable and Reliable Autonomous Vehicle Systems Shaoshan Liu shaoshan.liu@perceptin.io Autonomous Driving Localization Most crucial task of autonomous driving Solutions: GNSS but withvariations,
VIA Mobile360 Surround View
 VIA Mobile360 Surround View VIA Mobile360 Surround View delivers real-time in-vehicle 360 video monitoring and recording to provide the most effective solution for driver monitoring, safety and vehicle
VIA Mobile360 Surround View VIA Mobile360 Surround View delivers real-time in-vehicle 360 video monitoring and recording to provide the most effective solution for driver monitoring, safety and vehicle
Real Time Multi-Sensor Data Acquisition and Processing for a Road Mapping System
 Real Time Multi-Sensor Data Acquisition and Processing for a Road Mapping System by Xiang Luo A thesis submitted for the degree of Master of Engineering (Research) Faculty of Engineering and Information
Real Time Multi-Sensor Data Acquisition and Processing for a Road Mapping System by Xiang Luo A thesis submitted for the degree of Master of Engineering (Research) Faculty of Engineering and Information
Industrial Metrology. Multisensor Measuring Machines O-INSPECT 322/442
 Industrial Metrology Multisensor Measuring Machines O-INSPECT 322/442 The moment the answer is right in front of your eyes. This is the moment we work for. // Certainty Made By Zeiss 2 Table of Contents
Industrial Metrology Multisensor Measuring Machines O-INSPECT 322/442 The moment the answer is right in front of your eyes. This is the moment we work for. // Certainty Made By Zeiss 2 Table of Contents
Computer Vision. CS664 Computer Vision. 1. Introduction. Course Requirements. Preparation. Applications. Applications of Computer Vision
 Computer Vision CS664 Computer Vision. Introduction Dan Huttenlocher Machines that see Broad field, any course will cover a subset of problems and techniques Closely related fields of study Artificial
Computer Vision CS664 Computer Vision. Introduction Dan Huttenlocher Machines that see Broad field, any course will cover a subset of problems and techniques Closely related fields of study Artificial
W4. Perception & Situation Awareness & Decision making
 W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
LearnOSM. The id Editor. Starting the id Editor
 LearnOSM The id Editor Reviewed 2016-02-08 The id editor is the de facto, browser-based OpenStreetMap editor. id is fast and easy to use, and allows mapping from various data sources such as satellite
LearnOSM The id Editor Reviewed 2016-02-08 The id editor is the de facto, browser-based OpenStreetMap editor. id is fast and easy to use, and allows mapping from various data sources such as satellite
3D Modeling of Objects Using Laser Scanning
 1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
Mindtree's video analytic software.
 Mindtree's video analytic software. Overview Mindtree s video analytics algorithms suite are low complexity algorithms that analyze video streams in real time and provide timely actionable information
Mindtree's video analytic software. Overview Mindtree s video analytics algorithms suite are low complexity algorithms that analyze video streams in real time and provide timely actionable information
Automotive LiDAR. General Motors R&D. Ariel Lipson
 Automotive LiDAR General Motors R&D Ariel Lipson Overview How LiDARs work (Automotive) State of play current devices, costs Alternative technologies / approaches and future outlook Advantages of LiDAR-enabled
Automotive LiDAR General Motors R&D Ariel Lipson Overview How LiDARs work (Automotive) State of play current devices, costs Alternative technologies / approaches and future outlook Advantages of LiDAR-enabled
Parallel or Perpendicular? How Can You Tell? Teacher Notes Page 1 of 6
 Teacher Notes How can a student be sure when lines are parallel or perpendicular to a given graph using the graphing calculator? The difficulty lies in matching a mechanical graph that is on a rectangular
Teacher Notes How can a student be sure when lines are parallel or perpendicular to a given graph using the graphing calculator? The difficulty lies in matching a mechanical graph that is on a rectangular
ROAD SURFACE STRUCTURE MONITORING AND ANALYSIS USING HIGH PRECISION GPS MOBILE MEASUREMENT SYSTEMS (MMS)
") ROAD SURFACE STRUCTURE MONITORING AND ANALYSIS USING HIGH PRECISION GPS MOBILE MEASUREMENT SYSTEMS (MMS) Bonifacio R. Prieto PASCO Philippines Corporation, Pasig City, 1605, Philippines Email: bonifacio_prieto@pascoph.com
ROAD SURFACE STRUCTURE MONITORING AND ANALYSIS USING HIGH PRECISION GPS MOBILE MEASUREMENT SYSTEMS (MMS) Bonifacio R. Prieto PASCO Philippines Corporation, Pasig City, 1605, Philippines Email: bonifacio_prieto@pascoph.com
ANALYZING AND COMPARING TRAFFIC NETWORK CONDITIONS WITH A QUALITY TOOL BASED ON FLOATING CAR AND STATIONARY DATA
 15th World Congress on Intelligent Transport Systems ITS Connections: Saving Time, Saving Lives New York, November 16-20, 2008 ANALYZING AND COMPARING TRAFFIC NETWORK CONDITIONS WITH A QUALITY TOOL BASED
15th World Congress on Intelligent Transport Systems ITS Connections: Saving Time, Saving Lives New York, November 16-20, 2008 ANALYZING AND COMPARING TRAFFIC NETWORK CONDITIONS WITH A QUALITY TOOL BASED
Cloud-based Large Scale Video Analysis
 Cloud-based Large Scale Video Analysis Marcos Nieto Principal Researcher Vicomtech-IK4 Joachim Kreikemeier Manager V-Drive Valeo Schalter und Sensoren GmbH INDEX 1. Cloud-LSVA project 2. ADAS validation
Cloud-based Large Scale Video Analysis Marcos Nieto Principal Researcher Vicomtech-IK4 Joachim Kreikemeier Manager V-Drive Valeo Schalter und Sensoren GmbH INDEX 1. Cloud-LSVA project 2. ADAS validation
Virtual Test Driving in the Development Process New Methods and Tools for Current Challenges
 Virtual Test Driving in the Development Process New Methods and Tools for Current Challenges Episode 1: Hardware-in-the-Loop Current and Future Challenges for Function Verification with HIL Highly networked
Virtual Test Driving in the Development Process New Methods and Tools for Current Challenges Episode 1: Hardware-in-the-Loop Current and Future Challenges for Function Verification with HIL Highly networked
Using Web Camera Technology to Monitor Steel Construction
 Using Web Camera Technology to Monitor Steel Construction Kerry T. Slattery, Ph.D., P.E. Southern Illinois University Edwardsville Edwardsville, Illinois Many construction companies install electronic
Using Web Camera Technology to Monitor Steel Construction Kerry T. Slattery, Ph.D., P.E. Southern Illinois University Edwardsville Edwardsville, Illinois Many construction companies install electronic
Vision-based ACC with a Single Camera: Bounds on Range and Range Rate Accuracy
 Vision-based ACC with a Single Camera: Bounds on Range and Range Rate Accuracy Gideon P. Stein Ofer Mano Amnon Shashua MobileEye Vision Technologies Ltd. MobileEye Vision Technologies Ltd. Hebrew University
Vision-based ACC with a Single Camera: Bounds on Range and Range Rate Accuracy Gideon P. Stein Ofer Mano Amnon Shashua MobileEye Vision Technologies Ltd. MobileEye Vision Technologies Ltd. Hebrew University
Stereo Vision Based Advanced Driver Assistance System
 Stereo Vision Based Advanced Driver Assistance System Ho Gi Jung, Yun Hee Lee, Dong Suk Kim, Pal Joo Yoon MANDO Corp. 413-5,Gomae-Ri, Yongin-Si, Kyongi-Do, 449-901, Korea Phone: (82)31-0-5253 Fax: (82)31-0-5496
Stereo Vision Based Advanced Driver Assistance System Ho Gi Jung, Yun Hee Lee, Dong Suk Kim, Pal Joo Yoon MANDO Corp. 413-5,Gomae-Ri, Yongin-Si, Kyongi-Do, 449-901, Korea Phone: (82)31-0-5253 Fax: (82)31-0-5496
Characterizing Strategies of Fixing Full Scale Models in Construction Photogrammetric Surveying. Ryan Hough and Fei Dai
 697 Characterizing Strategies of Fixing Full Scale Models in Construction Photogrammetric Surveying Ryan Hough and Fei Dai West Virginia University, Department of Civil and Environmental Engineering, P.O.
697 Characterizing Strategies of Fixing Full Scale Models in Construction Photogrammetric Surveying Ryan Hough and Fei Dai West Virginia University, Department of Civil and Environmental Engineering, P.O.
Solutions for. Avionics Networking. CANoe.CANaero. CANalyzer.CANaero ENGLISH
 Solutions for Avionics Networking CANoe.CANaero ENGLISH CANalyzer.CANaero CANalyzer.CANaero 7.6 Universal Analysis Tool for CAN-based Avionics Networks Overview of Advantages Easy observation of data traffic
Solutions for Avionics Networking CANoe.CANaero ENGLISH CANalyzer.CANaero CANalyzer.CANaero 7.6 Universal Analysis Tool for CAN-based Avionics Networks Overview of Advantages Easy observation of data traffic
1. ABOUT INSTALLATION COMPATIBILITY SURESIM WORKFLOWS a. Workflow b. Workflow SURESIM TUTORIAL...
 SuReSim manual 1. ABOUT... 2 2. INSTALLATION... 2 3. COMPATIBILITY... 2 4. SURESIM WORKFLOWS... 2 a. Workflow 1... 3 b. Workflow 2... 4 5. SURESIM TUTORIAL... 5 a. Import Data... 5 b. Parameter Selection...
SuReSim manual 1. ABOUT... 2 2. INSTALLATION... 2 3. COMPATIBILITY... 2 4. SURESIM WORKFLOWS... 2 a. Workflow 1... 3 b. Workflow 2... 4 5. SURESIM TUTORIAL... 5 a. Import Data... 5 b. Parameter Selection...
The principles of CCTV design in VideoCAD
 The principles of CCTV design in VideoCAD By Stanislav Utochkin, cctvcad.com CCTV focus readers have already had an opportunity to read about VideoCAD in the past issues. This is the only specialised program
The principles of CCTV design in VideoCAD By Stanislav Utochkin, cctvcad.com CCTV focus readers have already had an opportunity to read about VideoCAD in the past issues. This is the only specialised program
!!!"#$%!&'()*&+,'-%%./01"&', Tokihiko Akita. AISIN SEIKI Co., Ltd. Parking Space Detection with Motion Stereo Camera applying Viterbi algorithm
*&+,'-%%./01&', Tokihiko Akita. AISIN SEIKI Co., Ltd. Parking Space Detection with Motion Stereo Camera applying Viterbi algorithm") !!!"#$%!&'()*&+,'-%%./01"&', Tokihiko Akita AISIN SEIKI Co., Ltd. Parking Space Detection with Motion Stereo Camera applying Viterbi algorithm! !"#$%&'(&)'*+%*+, -. /"0123'4*5 6.&/",70&"$2'37+89&:&;7+%3#7&
!!!"#$%!&'()*&+,'-%%./01"&', Tokihiko Akita AISIN SEIKI Co., Ltd. Parking Space Detection with Motion Stereo Camera applying Viterbi algorithm! !"#$%&'(&)'*+%*+, -. /"0123'4*5 6.&/",70&"$2'37+89&:&;7+%3#7&
Connected Car. Dr. Sania Irwin. Head of Systems & Applications May 27, Nokia Solutions and Networks 2014 For internal use
 Connected Car Dr. Sania Irwin Head of Systems & Applications May 27, 2015 1 Nokia Solutions and Networks 2014 For internal use Agenda Introduction Industry Landscape Industry Architecture & Implications
Connected Car Dr. Sania Irwin Head of Systems & Applications May 27, 2015 1 Nokia Solutions and Networks 2014 For internal use Agenda Introduction Industry Landscape Industry Architecture & Implications
ESPROS Photonics Corporation
 Next generation pulsed time-of-flight sensors for autonomous driving Beat De Coi 1 Topics ADAS requirements Sensor technology overview ESPROS CCD/CMOS technology OHC15LTM Technology comparison of receiver
Next generation pulsed time-of-flight sensors for autonomous driving Beat De Coi 1 Topics ADAS requirements Sensor technology overview ESPROS CCD/CMOS technology OHC15LTM Technology comparison of receiver
차세대지능형자동차를위한신호처리기술 정호기
 차세대지능형자동차를위한신호처리기술 008.08. 정호기 E-mail: hgjung@mando.com hgjung@yonsei.ac.kr 0 . 지능형자동차의미래 ) 단위 system functions 운전자상황인식 얼굴방향인식 시선방향인식 졸음운전인식 운전능력상실인식 차선인식, 전방장애물검출및분류 Lane Keeping System + Adaptive Cruise
차세대지능형자동차를위한신호처리기술 008.08. 정호기 E-mail: hgjung@mando.com hgjung@yonsei.ac.kr 0 . 지능형자동차의미래 ) 단위 system functions 운전자상황인식 얼굴방향인식 시선방향인식 졸음운전인식 운전능력상실인식 차선인식, 전방장애물검출및분류 Lane Keeping System + Adaptive Cruise
Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018
 Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018 Asaf Moses Systematics Ltd., Technical Product Manager aviasafm@systematics.co.il 1 Autonomous
Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018 Asaf Moses Systematics Ltd., Technical Product Manager aviasafm@systematics.co.il 1 Autonomous
Evaluation of a laser-based reference system for ADAS
 23 rd ITS World Congress, Melbourne, Australia, 10 14 October 2016 Paper number ITS- EU-TP0045 Evaluation of a laser-based reference system for ADAS N. Steinhardt 1*, S. Kaufmann 2, S. Rebhan 1, U. Lages
23 rd ITS World Congress, Melbourne, Australia, 10 14 October 2016 Paper number ITS- EU-TP0045 Evaluation of a laser-based reference system for ADAS N. Steinhardt 1*, S. Kaufmann 2, S. Rebhan 1, U. Lages
Chapter 2 Trajectory and Floating-Car Data
 Chapter 2 Trajectory and Floating-Car Data Measure what is measurable, and make measurable what is not so. Galileo Galilei Abstract Different aspects of traffic dynamics are captured by different measurement
Chapter 2 Trajectory and Floating-Car Data Measure what is measurable, and make measurable what is not so. Galileo Galilei Abstract Different aspects of traffic dynamics are captured by different measurement
Vehicle Localization. Hannah Rae Kerner 21 April 2015
 Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
TcpMDT Version 7.0 Summary of Differences with Version 6.5
 Sumatra, 9 E-29190 Málaga (Spain) www.aplitop.com Tel.: +34 95 2439771 Fax: +34 95 2431371 TcpMDT Version 7.0 Summary of Differences with Version 6.5 CAD Versions supported TcpMDT 7 works with several
Sumatra, 9 E-29190 Málaga (Spain) www.aplitop.com Tel.: +34 95 2439771 Fax: +34 95 2431371 TcpMDT Version 7.0 Summary of Differences with Version 6.5 CAD Versions supported TcpMDT 7 works with several
EVOLUTION OF POINT CLOUD
 Figure 1: Left and right images of a stereo pair and the disparity map (right) showing the differences of each pixel in the right and left image. (source: https://stackoverflow.com/questions/17607312/difference-between-disparity-map-and-disparity-image-in-stereo-matching)
Figure 1: Left and right images of a stereo pair and the disparity map (right) showing the differences of each pixel in the right and left image. (source: https://stackoverflow.com/questions/17607312/difference-between-disparity-map-and-disparity-image-in-stereo-matching)
Epipolar geometry-based ego-localization using an in-vehicle monocular camera
 Epipolar geometry-based ego-localization using an in-vehicle monocular camera Haruya Kyutoku 1, Yasutomo Kawanishi 1, Daisuke Deguchi 1, Ichiro Ide 1, Hiroshi Murase 1 1 : Nagoya University, Japan E-mail:
Epipolar geometry-based ego-localization using an in-vehicle monocular camera Haruya Kyutoku 1, Yasutomo Kawanishi 1, Daisuke Deguchi 1, Ichiro Ide 1, Hiroshi Murase 1 1 : Nagoya University, Japan E-mail:
Emerging Vision Technologies: Enabling a New Era of Intelligent Devices
 Emerging Vision Technologies: Enabling a New Era of Intelligent Devices Computer vision overview Computer vision is being integrated in our daily lives Acquiring, processing, and understanding visual data
Emerging Vision Technologies: Enabling a New Era of Intelligent Devices Computer vision overview Computer vision is being integrated in our daily lives Acquiring, processing, and understanding visual data
IMPROVING ADAS VALIDATION WITH MBT
 Sophia Antipolis, French Riviera 20-22 October 2015 IMPROVING ADAS VALIDATION WITH MBT Presented by Laurent RAFFAELLI ALL4TEC laurent.raffaelli@all4tec.net AGENDA What is an ADAS? ADAS Validation Implementation
Sophia Antipolis, French Riviera 20-22 October 2015 IMPROVING ADAS VALIDATION WITH MBT Presented by Laurent RAFFAELLI ALL4TEC laurent.raffaelli@all4tec.net AGENDA What is an ADAS? ADAS Validation Implementation
Trimble Engineering & Construction Group, 5475 Kellenburger Road, Dayton, OH , USA
 Trimble VISION Ken Joyce Martin Koehler Michael Vogel Trimble Engineering and Construction Group Westminster, Colorado, USA April 2012 Trimble Engineering & Construction Group, 5475 Kellenburger Road,
Trimble VISION Ken Joyce Martin Koehler Michael Vogel Trimble Engineering and Construction Group Westminster, Colorado, USA April 2012 Trimble Engineering & Construction Group, 5475 Kellenburger Road,
Creating Icons for Leopard Buttons
 Creating Icons for Leopard Buttons Introduction Among the new features that C-Max 2.0 brings to the Ocelot and Leopard controllers, one of the more sophisticated ones allows the user to create icons that
Creating Icons for Leopard Buttons Introduction Among the new features that C-Max 2.0 brings to the Ocelot and Leopard controllers, one of the more sophisticated ones allows the user to create icons that