The Efficient Extension of Globally Consistent Scan Matching to 6 DoF
|
|
|
- Rosa Alexander
- 5 years ago
- Views:
Transcription
1 The Efficient Extension of Globally Consistent Scan Matching to 6 DoF Dorit Borrmann, Jan Elseberg, Kai Lingemann, Andreas Nüchter, Joachim Hertzberg 1 / 20
2 Outline 1 Introduction 2 Algorithm 3 Performance 4 Results 2 / 20

3 Scan Matching 3 / 20
4 Sequential vs. Globally Consistent 4 / 20
5 Sequential vs. Globally Consistent Globally Consistent Range Scan Alignment for Environment Mapping, F. Lu and E. Milios (1997) Previously only 3-d poses - here extended to 6-d 4 / 20
6 Problem Definition Given: Wanted: A sequence of 3D scans Initial 6-d pose estimates with Gaussian noise New pose estimates Globally consistent 3D map 5 / 20
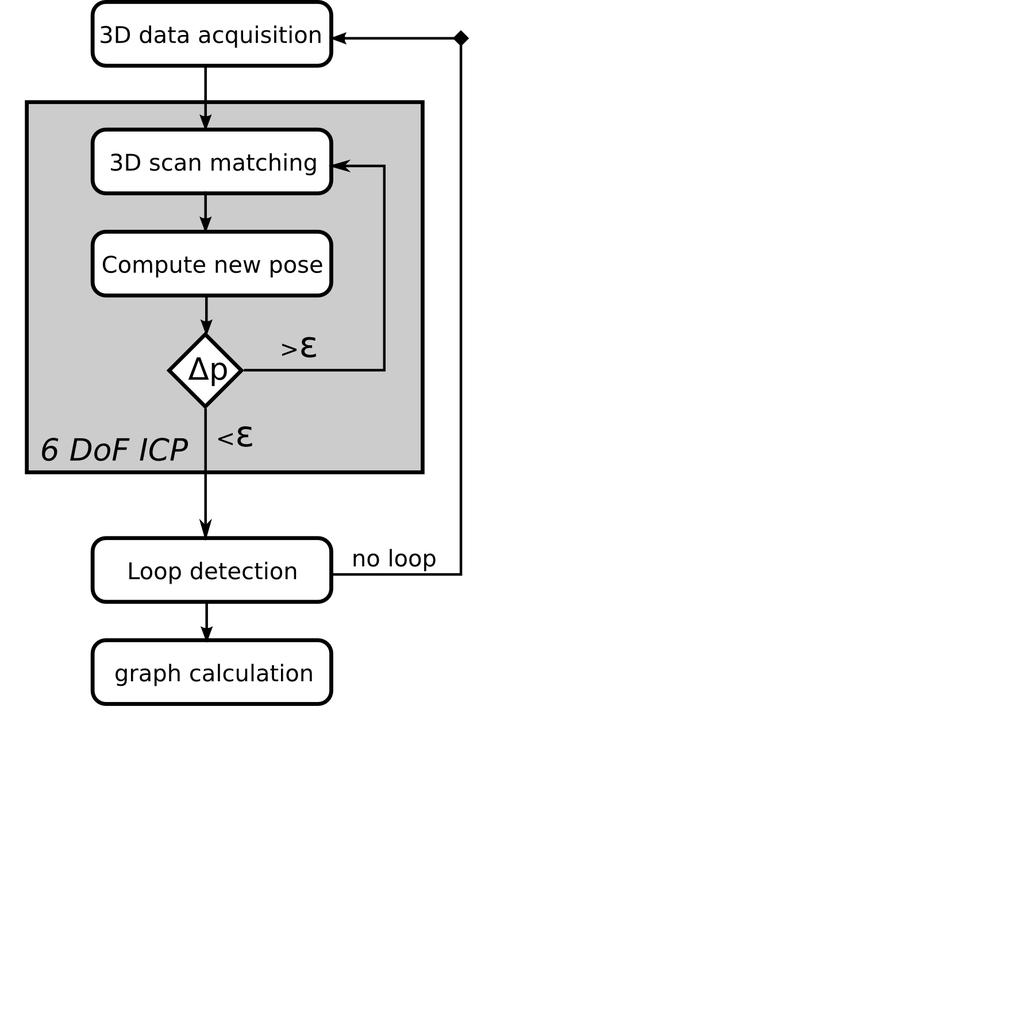
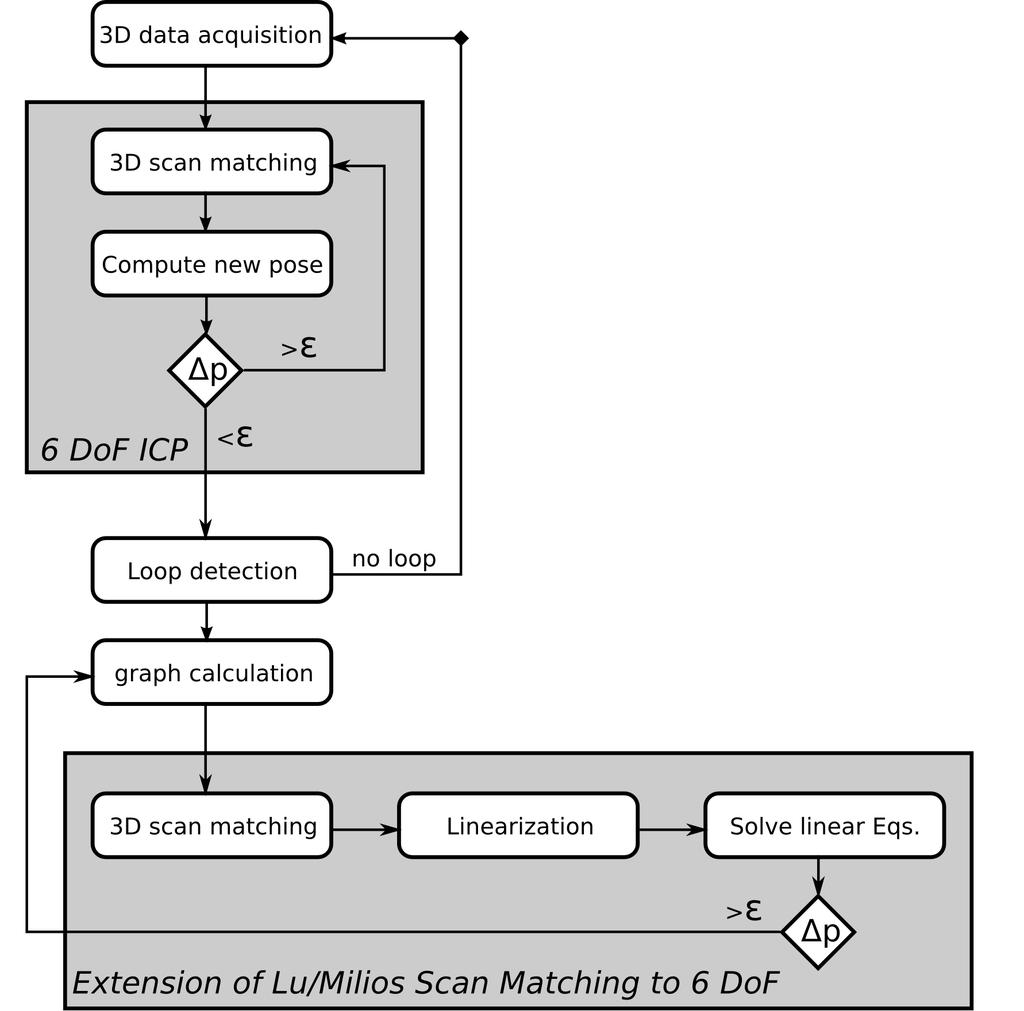
7 Algorithm 1 Sequential scan matching with loop-closing 1 Sequential scan matching repeat Register scan with predecessor (ICP) until pose differences small 2 Create graph Edge between consecutive scans Edge between scans with corresponding points 6 / 20
8 Algorithm 2 Estimation algorithm according to Lu and Milios 1 Determine point correspondences 2 For each edge in the graph determine pose differences and covariances 3 Create equation system from pose differences and covariance matrices W = (i,j) (D i,j D i,j ) T C 1 i,j (D i,j D i,j ) 4 Linearize and solve equation system 5 Revise poses and covariances 7 / 20
9 8 / 20
10 8 / 20
11 8 / 20
12 8 / 20
13 8 / 20
14 8 / 20
15 8 / 20
16 8 / 20
17 Improving Performance Fast search of corresponding points Fast construction of linear system Fast matrix inversion 9 / 20
18 Searching corresponding point pairs n points per scan Unoptimized closest point search takes O(n 2 ) 10 / 20
19 Searching corresponding point pairs n points per scan Unoptimized closest point search takes O(n 2 ) Storing points in k-d tree reduces cost to O(n log n) 10 / 20
20 Searching corresponding point pairs Problem: Solution: Each global optimization step transforms all scan poses Recomputing k-d tree each step is inefficient Calculate k-d tree only once Transform query point into local coordinate system 11 / 20
21 Constructing the linear system Needed: C 1 i,j = (M T M)/s 2 D i,j = (M T M) 1 M T Z 12 / 20
22 Constructing the linear system Needed: C 1 i,j = (M T M)/s 2 D i,j = (M T M) 1 M T Z M R 3n 6 Z R 3n 1 12 / 20
23 Constructing the linear system Needed: C 1 i,j = (M T M)/s 2 D i,j = (M T M) 1 M T Z M R 3n 6 Z R 3n 1 M T M = 0 nx k= y k z k z k x k y k 0 x k 0 z k y k yk 2 + z2 k x k z k x k y k y k x k 0 x k z k yk 2 + x2 k y k z k z k 0 x k x k y k y k z k xk 2 + z2 k 1 C A M T Z = 0 nx B x k y k z k z k y k + y k z k y k x k + x k y k z k x k x k z k 1 C A 12 / 20
24 Matrix Inversion Solving the linear equation system by matrix inversion (O(n 3 )) Matrix is positive definite use Cholesky decomposition Matrix is sparse number of entries number of overlapping scans sparse Cholesky decomposition (O(number of entries)) 13 / 20
25 Computing times Simple matrix inversion Cholesky decomposition Sparse Chol. decomposition Standard k-d tree search Improved k-d tree search Absolute time in ms Relative time in % Absolute time in ms Relative time in % University building Bridge 14 / 20
26 Campus of the Leibniz University of Hannover Laser scans by courtesy of O. Wulf und B. Wagner (University of Hannover) 15 / 20

27 Complete Map - Leibniz University of Hannover 16 / 20
28 Matrix in iteration / 20

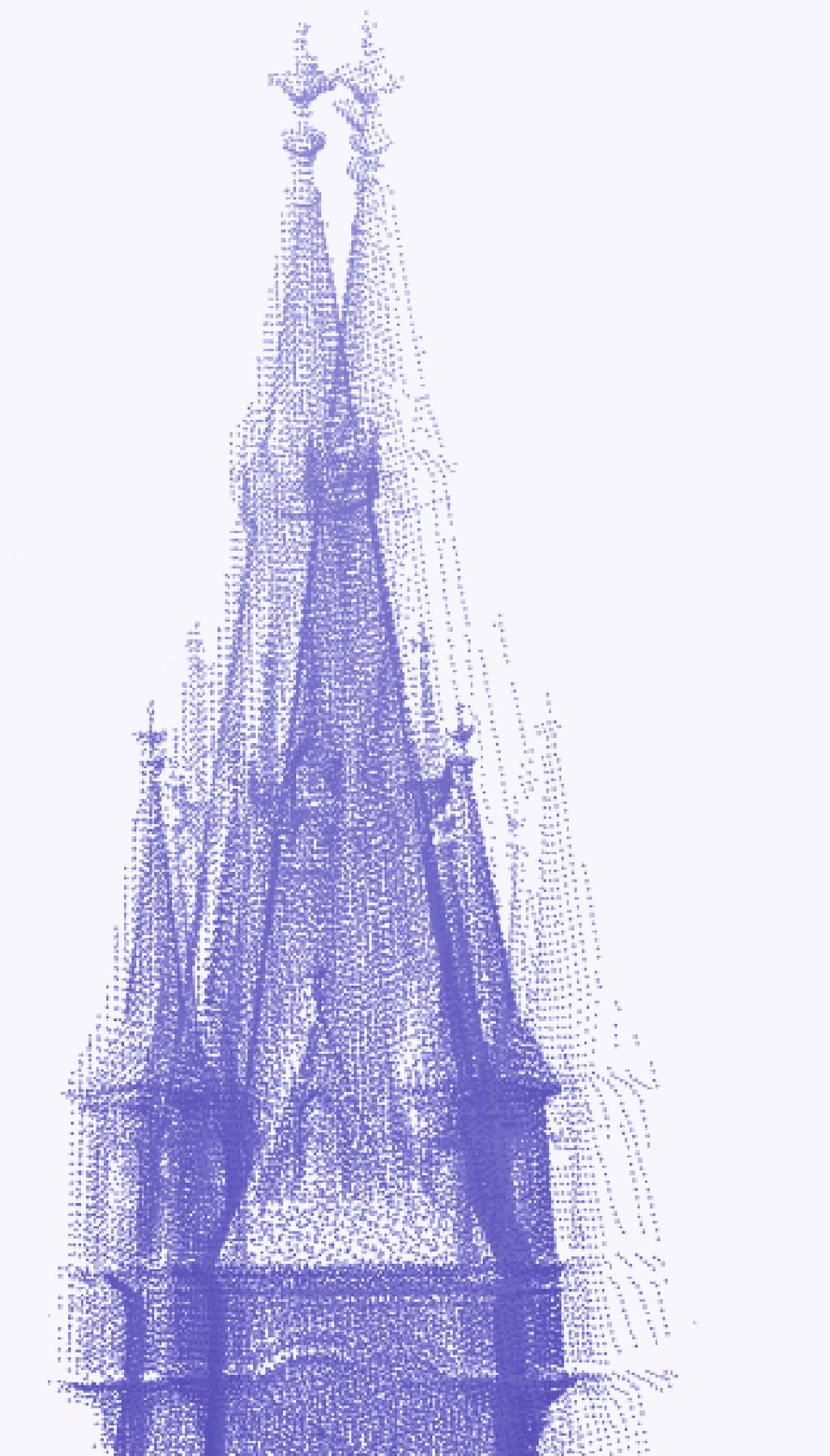
29 Market square in Horn (Austria) 13 scans points per scan error correction from cm to < 9cm Laser scans by courtesy of N. Studnicka (RIEGL Laser Measurement Systems GmbH) 18 / 20


30 19 / 20
31 Conclusions Sequential scan matching leads to summation of errors Presented approach leads to globally consistent scan matching Functionality in all 6 degrees of freedom Some modifications allow handling of large amounts of data in reasonable time 20 / 20
The Efficient Extension of Globally Consistent Scan Matching to 6 DoF
 The Efficient Extension of Globally Consistent Scan Matching to 6 DoF Dorit Borrmann Jan Elseberg Kai Lingemann Andreas Nüchter Joachim Hertzberg University of Osnabrück Knowledge-Based Systems Research
The Efficient Extension of Globally Consistent Scan Matching to 6 DoF Dorit Borrmann Jan Elseberg Kai Lingemann Andreas Nüchter Joachim Hertzberg University of Osnabrück Knowledge-Based Systems Research
3D Maps. Prof. Dr. Andreas Nüchter Jacobs University Bremen Campus Ring Bremen 1
 Towards Semantic 3D Maps Prof. Dr. Andreas Nüchter Jacobs University Bremen Campus Ring 1 28759 Bremen 1 Acknowledgements I would like to thank the following researchers for joint work and inspiration
Towards Semantic 3D Maps Prof. Dr. Andreas Nüchter Jacobs University Bremen Campus Ring 1 28759 Bremen 1 Acknowledgements I would like to thank the following researchers for joint work and inspiration
3D Point Cloud Processing
 3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
Globally consistent 3D mapping with scan matching
 Robotics and Autonomous Systems 56 (28) 13 142 www.elsevier.com/locate/robot Globally consistent 3D mapping with scan matching Dorit Borrmann, Jan Elseberg, Kai Lingemann, Andreas Nüchter, Joachim Hertzberg
Robotics and Autonomous Systems 56 (28) 13 142 www.elsevier.com/locate/robot Globally consistent 3D mapping with scan matching Dorit Borrmann, Jan Elseberg, Kai Lingemann, Andreas Nüchter, Joachim Hertzberg
Robot Mapping. Least Squares Approach to SLAM. Cyrill Stachniss
 Robot Mapping Least Squares Approach to SLAM Cyrill Stachniss 1 Three Main SLAM Paradigms Kalman filter Particle filter Graphbased least squares approach to SLAM 2 Least Squares in General Approach for
Robot Mapping Least Squares Approach to SLAM Cyrill Stachniss 1 Three Main SLAM Paradigms Kalman filter Particle filter Graphbased least squares approach to SLAM 2 Least Squares in General Approach for
Graphbased. Kalman filter. Particle filter. Three Main SLAM Paradigms. Robot Mapping. Least Squares Approach to SLAM. Least Squares in General
 Robot Mapping Three Main SLAM Paradigms Least Squares Approach to SLAM Kalman filter Particle filter Graphbased Cyrill Stachniss least squares approach to SLAM 1 2 Least Squares in General! Approach for
Robot Mapping Three Main SLAM Paradigms Least Squares Approach to SLAM Kalman filter Particle filter Graphbased Cyrill Stachniss least squares approach to SLAM 1 2 Least Squares in General! Approach for
5.2 Surface Registration
 Spring 2018 CSCI 621: Digital Geometry Processing 5.2 Surface Registration Hao Li http://cs621.hao-li.com 1 Acknowledgement Images and Slides are courtesy of Prof. Szymon Rusinkiewicz, Princeton University
Spring 2018 CSCI 621: Digital Geometry Processing 5.2 Surface Registration Hao Li http://cs621.hao-li.com 1 Acknowledgement Images and Slides are courtesy of Prof. Szymon Rusinkiewicz, Princeton University
Advanced Techniques for Mobile Robotics Graph-based SLAM using Least Squares. Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz
 Advanced Techniques for Mobile Robotics Graph-based SLAM using Least Squares Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz SLAM Constraints connect the poses of the robot while it is moving
Advanced Techniques for Mobile Robotics Graph-based SLAM using Least Squares Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz SLAM Constraints connect the poses of the robot while it is moving
If the robot moves from F l to F r, and observes the coordinates of the same physical point as. l p and. coordinates are related by [9]
![If the robot moves from F l to F r, and observes the coordinates of the same physical point as. l p and. coordinates are related by [9]](/thumbs/80/81472349.jpg "If the robot moves from F l to F r, and observes the coordinates of the same physical point as. l p and. coordinates are related by [9]") The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Evaluation of the Robustness of Planar-Patches based 3D-Registration using Marker-based
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Evaluation of the Robustness of Planar-Patches based 3D-Registration using Marker-based
3D Point Cloud Processing
 3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
Ground Truth Evaluation of Large Urban 6D SLAM
 Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems San Diego, CA, USA, Oct 29 - Nov 2, 2007 TuC1.4 Ground Truth Evaluation of Large Urban 6D SLAM Oliver Wulf, Andreas
Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems San Diego, CA, USA, Oct 29 - Nov 2, 2007 TuC1.4 Ground Truth Evaluation of Large Urban 6D SLAM Oliver Wulf, Andreas
Towards Mobile Mapping of Underground Mines. Andreas Nüchter, Jan Elseberg, Peter Janotta
 Towards Mobile Mapping of Underground Mines Andreas Nüchter, Jan Elseberg, Peter Janotta Informatics VII Robotics and Telematics Julius-Maximilian University of Würzburg Am Hubland, D-97074 Würzburg, Germany
Towards Mobile Mapping of Underground Mines Andreas Nüchter, Jan Elseberg, Peter Janotta Informatics VII Robotics and Telematics Julius-Maximilian University of Würzburg Am Hubland, D-97074 Würzburg, Germany
6D SLAM PRELIMINARY REPORT ON CLOSING THE LOOP IN SIX DIMENSIONS
 6D SLAM PRELIMINARY REPORT ON CLOSING THE LOOP IN SIX DIMENSIONS Hartmut Surmann Kai Lingemann Andreas Nüchter Joachim Hertzberg Fraunhofer Institute for Autonomous Intelligent Systems Schloss Birlinghoven
6D SLAM PRELIMINARY REPORT ON CLOSING THE LOOP IN SIX DIMENSIONS Hartmut Surmann Kai Lingemann Andreas Nüchter Joachim Hertzberg Fraunhofer Institute for Autonomous Intelligent Systems Schloss Birlinghoven
Towards Optimal 3D Point Clouds
 By Andreas Nüchter, Jan Elseberg and Dorit Borrmann, Germany feature Automation in 3D Mobile Laser Scanning Towards Optimal 3D Point Clouds Motivated by the increasing need for rapid characterisation of
By Andreas Nüchter, Jan Elseberg and Dorit Borrmann, Germany feature Automation in 3D Mobile Laser Scanning Towards Optimal 3D Point Clouds Motivated by the increasing need for rapid characterisation of
6D SLAM with Kurt3D. Andreas Nüchter, Kai Lingemann, Joachim Hertzberg
 6D SLAM with Kurt3D Andreas Nüchter, Kai Lingemann, Joachim Hertzberg University of Osnabrück, Institute of Computer Science Knowledge Based Systems Research Group Albrechtstr. 28, D-4969 Osnabrück, Germany
6D SLAM with Kurt3D Andreas Nüchter, Kai Lingemann, Joachim Hertzberg University of Osnabrück, Institute of Computer Science Knowledge Based Systems Research Group Albrechtstr. 28, D-4969 Osnabrück, Germany
Robot Mapping. SLAM Front-Ends. Cyrill Stachniss. Partial image courtesy: Edwin Olson 1
 Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
Least Squares and SLAM Pose-SLAM
 Least Squares and SLAM Pose-SLAM Giorgio Grisetti Part of the material of this course is taken from the Robotics 2 lectures given by G.Grisetti, W.Burgard, C.Stachniss, K.Arras, D. Tipaldi and M.Bennewitz
Least Squares and SLAM Pose-SLAM Giorgio Grisetti Part of the material of this course is taken from the Robotics 2 lectures given by G.Grisetti, W.Burgard, C.Stachniss, K.Arras, D. Tipaldi and M.Bennewitz
First scan matching algorithms. Alberto Quattrini Li University of South Carolina
 First scan matching algorithms Alberto Quattrini Li 2015-10-22 University of South Carolina Robot mapping through scan-matching Framework for consistent registration of multiple frames of measurements
First scan matching algorithms Alberto Quattrini Li 2015-10-22 University of South Carolina Robot mapping through scan-matching Framework for consistent registration of multiple frames of measurements
A Heuristic Loop Closing Technique for Large-Scale 6D SLAM
 Jochen Sprickerhof, Andreas Nüchter, Kai Lingemann, Joachim Hertzberg A Heuristic Loop Closing Technique for Large-Scale 6D SLAM This paper presents a novel heuristic for correcting scan pose estimations
Jochen Sprickerhof, Andreas Nüchter, Kai Lingemann, Joachim Hertzberg A Heuristic Loop Closing Technique for Large-Scale 6D SLAM This paper presents a novel heuristic for correcting scan pose estimations
Surface Registration. Gianpaolo Palma
 Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
A comparison of Algorithms for Sparse Matrix. Real-time Multibody Dynamic Simulation
 A comparison of Algorithms for Sparse Matrix Factoring and Variable Reordering aimed at Real-time Multibody Dynamic Simulation Jose-Luis Torres-Moreno, Jose-Luis Blanco, Javier López-Martínez, Antonio
A comparison of Algorithms for Sparse Matrix Factoring and Variable Reordering aimed at Real-time Multibody Dynamic Simulation Jose-Luis Torres-Moreno, Jose-Luis Blanco, Javier López-Martínez, Antonio
Dynamic Geometry Processing
 Dynamic Geometry Processing EG 2012 Tutorial Will Chang, Hao Li, Niloy Mitra, Mark Pauly, Michael Wand Tutorial: Dynamic Geometry Processing 1 Articulated Global Registration Introduction and Overview
Dynamic Geometry Processing EG 2012 Tutorial Will Chang, Hao Li, Niloy Mitra, Mark Pauly, Michael Wand Tutorial: Dynamic Geometry Processing 1 Articulated Global Registration Introduction and Overview
Automatic Appearance-Based Loop Detection from Three-Dimensional Laser Data Using the Normal Distributions Transform
 Automatic Appearance-Based Loop Detection from Three-Dimensional Laser Data Using the Normal Distributions Transform Martin Magnusson and Henrik Andreasson Center for Applied Autonomous Sensor Systems
Automatic Appearance-Based Loop Detection from Three-Dimensional Laser Data Using the Normal Distributions Transform Martin Magnusson and Henrik Andreasson Center for Applied Autonomous Sensor Systems
Boresight alignment method for mobile laser scanning systems
 Boresight alignment method for mobile laser scanning systems P. Rieger, N. Studnicka, M. Pfennigbauer RIEGL Laser Measurement Systems GmbH A-3580 Horn, Austria Contents A new principle of boresight alignment
Boresight alignment method for mobile laser scanning systems P. Rieger, N. Studnicka, M. Pfennigbauer RIEGL Laser Measurement Systems GmbH A-3580 Horn, Austria Contents A new principle of boresight alignment
Large-Scale. Point Cloud Processing Tutorial. Application: Mobile Mapping
 Large-Scale 3D Point Cloud Processing Tutorial 2013 Application: Mobile Mapping The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well
Large-Scale 3D Point Cloud Processing Tutorial 2013 Application: Mobile Mapping The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well
Benchmarking Urban Six-Degree-of-Freedom Simultaneous Localization and Mapping
 Benchmarking Urban Six-Degree-of-Freedom Simultaneous Localization and Mapping Oliver Wulf Institute for Systems Engineering (ISE/RTS) Leibniz Universitá t Hannover Appelstraße 9A D-30167 Hannover, Germany
Benchmarking Urban Six-Degree-of-Freedom Simultaneous Localization and Mapping Oliver Wulf Institute for Systems Engineering (ISE/RTS) Leibniz Universitá t Hannover Appelstraße 9A D-30167 Hannover, Germany
6DOF Semi-Rigid SLAM for Mobile Scanning
 6DOF Semi-Rigid SLAM for Mobile Scanning Jan Elseberg, Dorit Borrmann, and Andreas Nüchter Abstract The terrestrial acquisition of 3D point clouds by laser range finders has recently moved to mobile platforms.
6DOF Semi-Rigid SLAM for Mobile Scanning Jan Elseberg, Dorit Borrmann, and Andreas Nüchter Abstract The terrestrial acquisition of 3D point clouds by laser range finders has recently moved to mobile platforms.
Three-Dimensional Sensors Lecture 6: Point-Cloud Registration
 Three-Dimensional Sensors Lecture 6: Point-Cloud Registration Radu Horaud INRIA Grenoble Rhone-Alpes, France Radu.Horaud@inria.fr http://perception.inrialpes.fr/ Point-Cloud Registration Methods Fuse data
Three-Dimensional Sensors Lecture 6: Point-Cloud Registration Radu Horaud INRIA Grenoble Rhone-Alpes, France Radu.Horaud@inria.fr http://perception.inrialpes.fr/ Point-Cloud Registration Methods Fuse data
Aim. Structure and matrix sparsity: Part 1 The simplex method: Exploiting sparsity. Structure and matrix sparsity: Overview
 Aim Structure and matrix sparsity: Part 1 The simplex method: Exploiting sparsity Julian Hall School of Mathematics University of Edinburgh jajhall@ed.ac.uk What should a 2-hour PhD lecture on structure
Aim Structure and matrix sparsity: Part 1 The simplex method: Exploiting sparsity Julian Hall School of Mathematics University of Edinburgh jajhall@ed.ac.uk What should a 2-hour PhD lecture on structure
I How does the formulation (5) serve the purpose of the composite parameterization
 serve the purpose of the composite parameterization") Supplemental Material to Identifying Alzheimer s Disease-Related Brain Regions from Multi-Modality Neuroimaging Data using Sparse Composite Linear Discrimination Analysis I How does the formulation (5)
Supplemental Material to Identifying Alzheimer s Disease-Related Brain Regions from Multi-Modality Neuroimaging Data using Sparse Composite Linear Discrimination Analysis I How does the formulation (5)
A SENSOR SKID FOR PRECISE 3D MODELING OF PRODUCTION LINES
 A SENSOR SKID FOR PRECISE 3D MODELING OF PRODUCTION LINES JanElseberg, DoritBorrmann a,johannes Schauer b,andreas Nüchter a, DirkKoriath c, andulrichrautenberg c a Informatics VII:Robotics andtelematics,julius-maximilians-university
A SENSOR SKID FOR PRECISE 3D MODELING OF PRODUCTION LINES JanElseberg, DoritBorrmann a,johannes Schauer b,andreas Nüchter a, DirkKoriath c, andulrichrautenberg c a Informatics VII:Robotics andtelematics,julius-maximilians-university
Introduction to Mobile Robotics Iterative Closest Point Algorithm. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras
 Introduction to Mobile Robotics Iterative Closest Point Algorithm Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras 1 Motivation 2 The Problem Given: two corresponding point sets: Wanted: translation
Introduction to Mobile Robotics Iterative Closest Point Algorithm Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras 1 Motivation 2 The Problem Given: two corresponding point sets: Wanted: translation
Surfaces, meshes, and topology
 Surfaces from Point Samples Surfaces, meshes, and topology A surface is a 2-manifold embedded in 3- dimensional Euclidean space Such surfaces are often approximated by triangle meshes 2 1 Triangle mesh
Surfaces from Point Samples Surfaces, meshes, and topology A surface is a 2-manifold embedded in 3- dimensional Euclidean space Such surfaces are often approximated by triangle meshes 2 1 Triangle mesh
Automatic Reconstruction of Colored 3D Models
 Automatic Reconstruction of Colored 3D Models Kai Pervölz, Andreas Nüchter, Hartmut Surmann, and Joachim Hertzberg Fraunhofer Institute for Autonomous Intelligent Systems (AIS) Schloss Birlinghoven D-53754
Automatic Reconstruction of Colored 3D Models Kai Pervölz, Andreas Nüchter, Hartmut Surmann, and Joachim Hertzberg Fraunhofer Institute for Autonomous Intelligent Systems (AIS) Schloss Birlinghoven D-53754
Robot Mapping. TORO Gradient Descent for SLAM. Cyrill Stachniss
 Robot Mapping TORO Gradient Descent for SLAM Cyrill Stachniss 1 Stochastic Gradient Descent Minimize the error individually for each constraint (decomposition of the problem into sub-problems) Solve one
Robot Mapping TORO Gradient Descent for SLAM Cyrill Stachniss 1 Stochastic Gradient Descent Minimize the error individually for each constraint (decomposition of the problem into sub-problems) Solve one
Addition/Subtraction flops. ... k k + 1, n (n k)(n k) (n k)(n + 1 k) n 1 n, n (1)(1) (1)(2)
(n k) (n k)(n + 1 k) n 1 n, n (1)(1) (1)(2)") 1 CHAPTER 10 101 The flop counts for LU decomposition can be determined in a similar fashion as was done for Gauss elimination The major difference is that the elimination is only implemented for the left-hand
1 CHAPTER 10 101 The flop counts for LU decomposition can be determined in a similar fashion as was done for Gauss elimination The major difference is that the elimination is only implemented for the left-hand
Part 1. The Review of Linear Programming The Revised Simplex Method
 In the name of God Part 1. The Review of Linear Programming 1.4. Spring 2010 Instructor: Dr. Masoud Yaghini Introduction Outline in Tableau Format Comparison Between the Simplex and the Revised Simplex
In the name of God Part 1. The Review of Linear Programming 1.4. Spring 2010 Instructor: Dr. Masoud Yaghini Introduction Outline in Tableau Format Comparison Between the Simplex and the Revised Simplex
Automatic Construction of Polygonal Maps From Point Cloud Data
 Automatic Construction of Polygonal Maps From Point Cloud Data Thomas Wiemann, Andres Nüchter, Kai Lingemann, Stefan Stiene, and Joachim Hertzberg Abstract This paper presents a novel approach to create
Automatic Construction of Polygonal Maps From Point Cloud Data Thomas Wiemann, Andres Nüchter, Kai Lingemann, Stefan Stiene, and Joachim Hertzberg Abstract This paper presents a novel approach to create
Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction
 Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction Carsten Rother 09/12/2013 Computer Vision I: Multi-View 3D reconstruction Roadmap this lecture Computer Vision I: Multi-View
Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction Carsten Rother 09/12/2013 Computer Vision I: Multi-View 3D reconstruction Roadmap this lecture Computer Vision I: Multi-View
ICRA 2016 Tutorial on SLAM. Graph-Based SLAM and Sparsity. Cyrill Stachniss
 ICRA 2016 Tutorial on SLAM Graph-Based SLAM and Sparsity Cyrill Stachniss 1 Graph-Based SLAM?? 2 Graph-Based SLAM?? SLAM = simultaneous localization and mapping 3 Graph-Based SLAM?? SLAM = simultaneous
ICRA 2016 Tutorial on SLAM Graph-Based SLAM and Sparsity Cyrill Stachniss 1 Graph-Based SLAM?? 2 Graph-Based SLAM?? SLAM = simultaneous localization and mapping 3 Graph-Based SLAM?? SLAM = simultaneous
DESIGN OF AN INDOOR MAPPING SYSTEM USING THREE 2D LASER SCANNERS AND 6 DOF SLAM
 DESIGN OF AN INDOOR MAPPING SYSTEM USING THREE 2D LASER SCANNERS AND 6 DOF SLAM George Vosselman University of Twente, Faculty ITC, Enschede, the Netherlands george.vosselman@utwente.nl KEY WORDS: localisation,
DESIGN OF AN INDOOR MAPPING SYSTEM USING THREE 2D LASER SCANNERS AND 6 DOF SLAM George Vosselman University of Twente, Faculty ITC, Enschede, the Netherlands george.vosselman@utwente.nl KEY WORDS: localisation,
Matching and Recognition in 3D. Based on slides by Tom Funkhouser and Misha Kazhdan
 Matching and Recognition in 3D Based on slides by Tom Funkhouser and Misha Kazhdan From 2D to 3D: Some Things Easier No occlusion (but sometimes missing data instead) Segmenting objects often simpler From
Matching and Recognition in 3D Based on slides by Tom Funkhouser and Misha Kazhdan From 2D to 3D: Some Things Easier No occlusion (but sometimes missing data instead) Segmenting objects often simpler From
EVALUATING CONTINUOUS-TIME SLAM USING A PREDEFINED TRAJECTORY PROVIDED BY A ROBOTIC ARM
 EVALUATING CONTINUOUS-TIME SLAM USING A PREDEFINED TRAJECTORY PROVIDED BY A ROBOTIC ARM Bertram Koch, Robin Leblebici, Angel Martell, Sven Jörissen, Klaus Schilling, and Andreas Nüchter Informatics VII
EVALUATING CONTINUOUS-TIME SLAM USING A PREDEFINED TRAJECTORY PROVIDED BY A ROBOTIC ARM Bertram Koch, Robin Leblebici, Angel Martell, Sven Jörissen, Klaus Schilling, and Andreas Nüchter Informatics VII
(Sparse) Linear Solvers
 Linear Solvers") (Sparse) Linear Solvers Ax = B Why? Many geometry processing applications boil down to: solve one or more linear systems Parameterization Editing Reconstruction Fairing Morphing 1 Don t you just invert
(Sparse) Linear Solvers Ax = B Why? Many geometry processing applications boil down to: solve one or more linear systems Parameterization Editing Reconstruction Fairing Morphing 1 Don t you just invert
Rigorous Scan Data Adjustment for kinematic LIDAR systems
 Rigorous Scan Data Adjustment for kinematic LIDAR systems Paul Swatschina Riegl Laser Measurement Systems ELMF Amsterdam, The Netherlands 13 November 2013 www.riegl.com Contents why kinematic scan data
Rigorous Scan Data Adjustment for kinematic LIDAR systems Paul Swatschina Riegl Laser Measurement Systems ELMF Amsterdam, The Netherlands 13 November 2013 www.riegl.com Contents why kinematic scan data
3D Environment Reconstruction
 3D Environment Reconstruction Using Modified Color ICP Algorithm by Fusion of a Camera and a 3D Laser Range Finder The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15,
3D Environment Reconstruction Using Modified Color ICP Algorithm by Fusion of a Camera and a 3D Laser Range Finder The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15,
Scan Matching. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Basics of Localization, Mapping and SLAM. Jari Saarinen Aalto University Department of Automation and systems Technology
 Basics of Localization, Mapping and SLAM Jari Saarinen Aalto University Department of Automation and systems Technology Content Introduction to Problem (s) Localization A few basic equations Dead Reckoning
Basics of Localization, Mapping and SLAM Jari Saarinen Aalto University Department of Automation and systems Technology Content Introduction to Problem (s) Localization A few basic equations Dead Reckoning
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Efficient Estimation of Accurate Maximum Likelihood Maps in 3D
 Efficient Estimation of Accurate Maximum Likelihood Maps in 3D Giorgio Grisetti Slawomir Grzonka Cyrill Stachniss Patrick Pfaff Wolfram Burgard Abstract Learning maps is one of the fundamental tasks of
Efficient Estimation of Accurate Maximum Likelihood Maps in 3D Giorgio Grisetti Slawomir Grzonka Cyrill Stachniss Patrick Pfaff Wolfram Burgard Abstract Learning maps is one of the fundamental tasks of
Geometric Registration for Deformable Shapes 2.2 Deformable Registration
 Geometric Registration or Deormable Shapes 2.2 Deormable Registration Variational Model Deormable ICP Variational Model What is deormable shape matching? Example? What are the Correspondences? Eurographics
Geometric Registration or Deormable Shapes 2.2 Deormable Registration Variational Model Deormable ICP Variational Model What is deormable shape matching? Example? What are the Correspondences? Eurographics
Structure from Motion CSC 767
 Structure from Motion CSC 767 Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R,t R 2,t 2 R 3,t 3 Camera??
Structure from Motion CSC 767 Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R,t R 2,t 2 R 3,t 3 Camera??
(Sparse) Linear Solvers
 Linear Solvers") (Sparse) Linear Solvers Ax = B Why? Many geometry processing applications boil down to: solve one or more linear systems Parameterization Editing Reconstruction Fairing Morphing 2 Don t you just invert
(Sparse) Linear Solvers Ax = B Why? Many geometry processing applications boil down to: solve one or more linear systems Parameterization Editing Reconstruction Fairing Morphing 2 Don t you just invert
Vision Aided 3D Laser Scanner Based Registration
 1 Vision Aided 3D Laser Scanner Based Registration Henrik Andreasson Achim Lilienthal Centre of Applied Autonomous Sensor Systems, Dept. of Technology, Örebro University, Sweden Abstract This paper describes
1 Vision Aided 3D Laser Scanner Based Registration Henrik Andreasson Achim Lilienthal Centre of Applied Autonomous Sensor Systems, Dept. of Technology, Örebro University, Sweden Abstract This paper describes
Survey: Simultaneous Localisation and Mapping (SLAM) Ronja Güldenring Master Informatics Project Intellgient Robotics University of Hamburg
 Ronja Güldenring Master Informatics Project Intellgient Robotics University of Hamburg") Survey: Simultaneous Localisation and Mapping (SLAM) Ronja Güldenring Master Informatics Project Intellgient Robotics University of Hamburg Introduction EKF-SLAM FastSLAM Loop Closure 01.06.17 Ronja Güldenring
Survey: Simultaneous Localisation and Mapping (SLAM) Ronja Güldenring Master Informatics Project Intellgient Robotics University of Hamburg Introduction EKF-SLAM FastSLAM Loop Closure 01.06.17 Ronja Güldenring
Evaluation of 3D Registration Reliability and Speed A Comparison of ICP and NDT
 Evaluation of 3D Registration Reliability and Speed A Comparison of ICP and NDT Martin Magnusson, Andreas Nüchter, Christopher Lörken, Achim J. Lilienthal, and Joachim Hertzberg Abstract To advance robotic
Evaluation of 3D Registration Reliability and Speed A Comparison of ICP and NDT Martin Magnusson, Andreas Nüchter, Christopher Lörken, Achim J. Lilienthal, and Joachim Hertzberg Abstract To advance robotic
Structure from Motion
 11/18/11 Structure from Motion Computer Vision CS 143, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from
11/18/11 Structure from Motion Computer Vision CS 143, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from
Chapter 7: Computation of the Camera Matrix P
 Chapter 7: Computation of the Camera Matrix P Arco Nederveen Eagle Vision March 18, 2008 Arco Nederveen (Eagle Vision) The Camera Matrix P March 18, 2008 1 / 25 1 Chapter 7: Computation of the camera Matrix
Chapter 7: Computation of the Camera Matrix P Arco Nederveen Eagle Vision March 18, 2008 Arco Nederveen (Eagle Vision) The Camera Matrix P March 18, 2008 1 / 25 1 Chapter 7: Computation of the camera Matrix
Iterative Closest Point Algorithm in the Presence of Anisotropic Noise
 Iterative Closest Point Algorithm in the Presence of Anisotropic Noise L. Maier-Hein, T. R. dos Santos, A. M. Franz, H.-P. Meinzer German Cancer Research Center, Div. of Medical and Biological Informatics
Iterative Closest Point Algorithm in the Presence of Anisotropic Noise L. Maier-Hein, T. R. dos Santos, A. M. Franz, H.-P. Meinzer German Cancer Research Center, Div. of Medical and Biological Informatics
Advanced Computer Graphics
 G22.2274 001, Fall 2009 Advanced Computer Graphics Project details and tools 1 Project Topics Computer Animation Geometric Modeling Computational Photography Image processing 2 Optimization All projects
G22.2274 001, Fall 2009 Advanced Computer Graphics Project details and tools 1 Project Topics Computer Animation Geometric Modeling Computational Photography Image processing 2 Optimization All projects
Development of intelligent systems
 Development of intelligent systems (RInS) Transformations between coordinate frames Danijel Skočaj University of Ljubljana Faculty of Computer and Information Science Literature: Tadej Bajd (2006). Osnove
Development of intelligent systems (RInS) Transformations between coordinate frames Danijel Skočaj University of Ljubljana Faculty of Computer and Information Science Literature: Tadej Bajd (2006). Osnove
Analysis, optimization, and design of a SLAM solution for an implementation on reconfigurable hardware (FPGA) using CńaSH
 using CńaSH") December 12, 2016 MASTER THESIS Analysis, optimization, and design of a SLAM solution for an implementation on reconfigurable hardware (FPGA) using CńaSH Authors: Robin Appel Hendrik Folmer Faculty: Faculty
December 12, 2016 MASTER THESIS Analysis, optimization, and design of a SLAM solution for an implementation on reconfigurable hardware (FPGA) using CńaSH Authors: Robin Appel Hendrik Folmer Faculty: Faculty
Histograms. h(r k ) = n k. p(r k )= n k /NM. Histogram: number of times intensity level rk appears in the image
 = n k. p(r k )= n k /NM. Histogram: number of times intensity level rk appears in the image") Histograms h(r k ) = n k Histogram: number of times intensity level rk appears in the image p(r k )= n k /NM normalized histogram also a probability of occurence 1 Histogram of Image Intensities Create
Histograms h(r k ) = n k Histogram: number of times intensity level rk appears in the image p(r k )= n k /NM normalized histogram also a probability of occurence 1 Histogram of Image Intensities Create
RoboCupRescue - Simulation League Team RescueRobots Freiburg (Germany)
") RoboCupRescue - Simulation League Team RescueRobots Freiburg (Germany) Alexander Kleiner and Vittorio Amos Ziparo Institut für Informatik Foundations of AI Universität Freiburg, 79110 Freiburg, Germany
RoboCupRescue - Simulation League Team RescueRobots Freiburg (Germany) Alexander Kleiner and Vittorio Amos Ziparo Institut für Informatik Foundations of AI Universität Freiburg, 79110 Freiburg, Germany
Evaluation of Methods for Robotic Mapping of Cultural Heritage Sites
 Evaluation of Methods for Robotic Mapping of Cultural Heritage Sites Dorit Borrmann Robin Hess Daniel Eck Hamidreza Houshiar Andreas Nüchter Klaus Schilling Informatics VII: Robotics and Telematics, University
Evaluation of Methods for Robotic Mapping of Cultural Heritage Sites Dorit Borrmann Robin Hess Daniel Eck Hamidreza Houshiar Andreas Nüchter Klaus Schilling Informatics VII: Robotics and Telematics, University
CS 395T Lecture 12: Feature Matching and Bundle Adjustment. Qixing Huang October 10 st 2018
 CS 395T Lecture 12: Feature Matching and Bundle Adjustment Qixing Huang October 10 st 2018 Lecture Overview Dense Feature Correspondences Bundle Adjustment in Structure-from-Motion Image Matching Algorithm
CS 395T Lecture 12: Feature Matching and Bundle Adjustment Qixing Huang October 10 st 2018 Lecture Overview Dense Feature Correspondences Bundle Adjustment in Structure-from-Motion Image Matching Algorithm
Indoor Localization Algorithms for a Human-Operated Backpack System
 Indoor Localization Algorithms for a Human-Operated Backpack System George Chen, John Kua, Stephen Shum, Nikhil Naikal, Matthew Carlberg, Avideh Zakhor Video and Image Processing Lab, University of California,
Indoor Localization Algorithms for a Human-Operated Backpack System George Chen, John Kua, Stephen Shum, Nikhil Naikal, Matthew Carlberg, Avideh Zakhor Video and Image Processing Lab, University of California,
ULTRA-FAST HOLOGRAPHIC RECORDING AND AUTOMATIC 3D SCAN MATCHING OF LIVING HUMAN FACES
 ULTRA-FAST HOLOGRAPHIC RECORDING AND AUTOMATIC 3D SCAN MATCHING OF LIVING HUMAN FACES DOMINIK GIEL, SUSANNE FREY, ANDREA THELEN, JENS BONGARTZ, PETER HERING caesar foundation Ludwig Erhard Allee 2, D-53175
ULTRA-FAST HOLOGRAPHIC RECORDING AND AUTOMATIC 3D SCAN MATCHING OF LIVING HUMAN FACES DOMINIK GIEL, SUSANNE FREY, ANDREA THELEN, JENS BONGARTZ, PETER HERING caesar foundation Ludwig Erhard Allee 2, D-53175
Tracking system. Danica Kragic. Object Recognition & Model Based Tracking
 Tracking system Object Recognition & Model Based Tracking Motivation Manipulating objects in domestic environments Localization / Navigation Object Recognition Servoing Tracking Grasping Pose estimation
Tracking system Object Recognition & Model Based Tracking Motivation Manipulating objects in domestic environments Localization / Navigation Object Recognition Servoing Tracking Grasping Pose estimation
Robust Place Recognition for 3D Range Data based on Point Features
 21 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 21, Anchorage, Alaska, USA Robust Place Recognition for 3D Range Data based on Point Features Bastian
21 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 21, Anchorage, Alaska, USA Robust Place Recognition for 3D Range Data based on Point Features Bastian
A Robust and Fast Method for 6DoF Motion Estimation from Generalized 3D Data
 Autonomous Robots manuscript No. (will be inserted by the editor) A Robust and Fast Method for 6DoF Motion Estimation from Generalized 3D Data Diego Viejo Miguel Cazorla Received: date / Accepted: date
Autonomous Robots manuscript No. (will be inserted by the editor) A Robust and Fast Method for 6DoF Motion Estimation from Generalized 3D Data Diego Viejo Miguel Cazorla Received: date / Accepted: date
Computational Methods CMSC/AMSC/MAPL 460. Vectors, Matrices, Linear Systems, LU Decomposition, Ramani Duraiswami, Dept. of Computer Science
 Computational Methods CMSC/AMSC/MAPL 460 Vectors, Matrices, Linear Systems, LU Decomposition, Ramani Duraiswami, Dept. of Computer Science Some special matrices Matlab code How many operations and memory
Computational Methods CMSC/AMSC/MAPL 460 Vectors, Matrices, Linear Systems, LU Decomposition, Ramani Duraiswami, Dept. of Computer Science Some special matrices Matlab code How many operations and memory
LARGE SCALE LINEAR AND INTEGER OPTIMIZATION: A UNIFIED APPROACH
 LARGE SCALE LINEAR AND INTEGER OPTIMIZATION: A UNIFIED APPROACH Richard Kipp Martin Graduate School of Business University of Chicago % Kluwer Academic Publishers Boston/Dordrecht/London CONTENTS Preface
LARGE SCALE LINEAR AND INTEGER OPTIMIZATION: A UNIFIED APPROACH Richard Kipp Martin Graduate School of Business University of Chicago % Kluwer Academic Publishers Boston/Dordrecht/London CONTENTS Preface
Image Registration Lecture 4: First Examples
 Image Registration Lecture 4: First Examples Prof. Charlene Tsai Outline Example Intensity-based registration SSD error function Image mapping Function minimization: Gradient descent Derivative calculation
Image Registration Lecture 4: First Examples Prof. Charlene Tsai Outline Example Intensity-based registration SSD error function Image mapping Function minimization: Gradient descent Derivative calculation
Non-Rigid Registration and Rectification of 3D Laser Scans
 The IEEE/RSJ International Conference on Intelligent Robots and Systems October 8-,, Taipei, Taiwan Non-Rigid Registration and Rectification of D Laser Scans Jan Elseberg, Dorit Borrmann, Kai Lingemann,
The IEEE/RSJ International Conference on Intelligent Robots and Systems October 8-,, Taipei, Taiwan Non-Rigid Registration and Rectification of D Laser Scans Jan Elseberg, Dorit Borrmann, Kai Lingemann,
Multiple View Geometry in Computer Vision
 Multiple View Geometry in Computer Vision Prasanna Sahoo Department of Mathematics University of Louisville 1 Structure Computation Lecture 18 March 22, 2005 2 3D Reconstruction The goal of 3D reconstruction
Multiple View Geometry in Computer Vision Prasanna Sahoo Department of Mathematics University of Louisville 1 Structure Computation Lecture 18 March 22, 2005 2 3D Reconstruction The goal of 3D reconstruction
Improving Simultaneous Mapping and Localization in 3D Using Global Constraints
 Improving Simultaneous Mapping and Localization in 3D Using Global Constraints Rudolph Triebel and Wolfram Burgard Department of Computer Science, University of Freiburg George-Koehler-Allee 79, 79108
Improving Simultaneous Mapping and Localization in 3D Using Global Constraints Rudolph Triebel and Wolfram Burgard Department of Computer Science, University of Freiburg George-Koehler-Allee 79, 79108
ACCURACY OF EXTERIOR ORIENTATION FOR A RANGE CAMERA
 ACCURACY OF EXTERIOR ORIENTATION FOR A RANGE CAMERA Jan Boehm, Timothy Pattinson Institute for Photogrammetry, University of Stuttgart, Germany jan.boehm@ifp.uni-stuttgart.de Commission V, WG V/2, V/4,
ACCURACY OF EXTERIOR ORIENTATION FOR A RANGE CAMERA Jan Boehm, Timothy Pattinson Institute for Photogrammetry, University of Stuttgart, Germany jan.boehm@ifp.uni-stuttgart.de Commission V, WG V/2, V/4,
A parallel patch based algorithm for CT image denoising on the Cell Broadband Engine
 A parallel patch based algorithm for CT image denoising on the Cell Broadband Engine Dominik Bartuschat, Markus Stürmer, Harald Köstler and Ulrich Rüde Friedrich-Alexander Universität Erlangen-Nürnberg,Germany
A parallel patch based algorithm for CT image denoising on the Cell Broadband Engine Dominik Bartuschat, Markus Stürmer, Harald Köstler and Ulrich Rüde Friedrich-Alexander Universität Erlangen-Nürnberg,Germany
INCREMENTAL DISPLACEMENT ESTIMATION METHOD FOR VISUALLY SERVOED PARIED STRUCTURED LIGHT SYSTEM (ViSP)
") Blucher Mechanical Engineering Proceedings May 2014, vol. 1, num. 1 www.proceedings.blucher.com.br/evento/10wccm INCREMENAL DISPLACEMEN ESIMAION MEHOD FOR VISUALLY SERVOED PARIED SRUCURED LIGH SYSEM (ViSP)
Blucher Mechanical Engineering Proceedings May 2014, vol. 1, num. 1 www.proceedings.blucher.com.br/evento/10wccm INCREMENAL DISPLACEMEN ESIMAION MEHOD FOR VISUALLY SERVOED PARIED SRUCURED LIGH SYSEM (ViSP)
2.7 Numerical Linear Algebra Software
 2.7 Numerical Linear Algebra Software In this section we will discuss three software packages for linear algebra operations: (i) (ii) (iii) Matlab, Basic Linear Algebra Subroutines (BLAS) and LAPACK. There
2.7 Numerical Linear Algebra Software In this section we will discuss three software packages for linear algebra operations: (i) (ii) (iii) Matlab, Basic Linear Algebra Subroutines (BLAS) and LAPACK. There
MIRROR IDENTIFICATION AND CORRECTION OF 3D POINT CLOUDS
 MIRROR IDENTIFICATION AND CORRECTION OF 3D POINT CLOUDS P.-F. Käshammer and A. Nüchter Informatics VII Robotics and Telematics Julius-Maximilians University Würzburg, Germany andreas@nuechti.de Commission
MIRROR IDENTIFICATION AND CORRECTION OF 3D POINT CLOUDS P.-F. Käshammer and A. Nüchter Informatics VII Robotics and Telematics Julius-Maximilians University Würzburg, Germany andreas@nuechti.de Commission
Department of Electrical and Computer Systems Engineering
 Department of Electrical and Computer Systems Engineering Technical Report MECSE-29-2005 Scan Matching in Polar Coordinates with Application to SLAM A. Diosi and L. Kleeman Scan Matching in Polar Coordinates
Department of Electrical and Computer Systems Engineering Technical Report MECSE-29-2005 Scan Matching in Polar Coordinates with Application to SLAM A. Diosi and L. Kleeman Scan Matching in Polar Coordinates
Structure from Motion
 Structure from Motion Outline Bundle Adjustment Ambguities in Reconstruction Affine Factorization Extensions Structure from motion Recover both 3D scene geoemetry and camera positions SLAM: Simultaneous
Structure from Motion Outline Bundle Adjustment Ambguities in Reconstruction Affine Factorization Extensions Structure from motion Recover both 3D scene geoemetry and camera positions SLAM: Simultaneous
Humanoid Robotics. Least Squares. Maren Bennewitz
 Humanoid Robotics Least Squares Maren Bennewitz Goal of This Lecture Introduction into least squares Use it yourself for odometry calibration, later in the lecture: camera and whole-body self-calibration
Humanoid Robotics Least Squares Maren Bennewitz Goal of This Lecture Introduction into least squares Use it yourself for odometry calibration, later in the lecture: camera and whole-body self-calibration
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Unsupervised Learning
 Unsupervised Learning Learning without Class Labels (or correct outputs) Density Estimation Learn P(X) given training data for X Clustering Partition data into clusters Dimensionality Reduction Discover
Unsupervised Learning Learning without Class Labels (or correct outputs) Density Estimation Learn P(X) given training data for X Clustering Partition data into clusters Dimensionality Reduction Discover
Beyond Points: Evaluating Recent 3D Scan-Matching Algorithms
 Beyond Points: Evaluating Recent 3D Scan-Matching Algorithms Martin Magnusson, Narunas Vaskevicius, 2 Todor Stoyanov, Kaustubh Pathak, 2 and Andreas Birk 2 Abstract Given that 3D scan matching is such
Beyond Points: Evaluating Recent 3D Scan-Matching Algorithms Martin Magnusson, Narunas Vaskevicius, 2 Todor Stoyanov, Kaustubh Pathak, 2 and Andreas Birk 2 Abstract Given that 3D scan matching is such
3D Laser Scanner for Tele-exploration Robotic Systems
 3D Laser Scanner for Tele-exploration Robotic Systems Kai Pervölz, Hartmut Surmann and Stefan May Fraunhofer Institute for Intelligent Analysis and Information Systems (IAIS) Schloss Birlinghoven D-53754
3D Laser Scanner for Tele-exploration Robotic Systems Kai Pervölz, Hartmut Surmann and Stefan May Fraunhofer Institute for Intelligent Analysis and Information Systems (IAIS) Schloss Birlinghoven D-53754
Epipolar Geometry Prof. D. Stricker. With slides from A. Zisserman, S. Lazebnik, Seitz
 Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
N-View Methods. Diana Mateus, Nassir Navab. Computer Aided Medical Procedures Technische Universität München. 3D Computer Vision II
 1/66 N-View Methods Diana Mateus, Nassir Navab Computer Aided Medical Procedures Technische Universität München 3D Computer Vision II Inspired by Slides from Adrien Bartoli 2/66 Outline 1 Structure from
1/66 N-View Methods Diana Mateus, Nassir Navab Computer Aided Medical Procedures Technische Universität München 3D Computer Vision II Inspired by Slides from Adrien Bartoli 2/66 Outline 1 Structure from
Mixture Models and the EM Algorithm
 Mixture Models and the EM Algorithm Padhraic Smyth, Department of Computer Science University of California, Irvine c 2017 1 Finite Mixture Models Say we have a data set D = {x 1,..., x N } where x i is
Mixture Models and the EM Algorithm Padhraic Smyth, Department of Computer Science University of California, Irvine c 2017 1 Finite Mixture Models Say we have a data set D = {x 1,..., x N } where x i is
Parallel algorithms for Scientific Computing May 28, Hands-on and assignment solving numerical PDEs: experience with PETSc, deal.
 Division of Scientific Computing Department of Information Technology Uppsala University Parallel algorithms for Scientific Computing May 28, 2013 Hands-on and assignment solving numerical PDEs: experience
Division of Scientific Computing Department of Information Technology Uppsala University Parallel algorithms for Scientific Computing May 28, 2013 Hands-on and assignment solving numerical PDEs: experience
This week. CENG 732 Computer Animation. Warping an Object. Warping an Object. 2D Grid Deformation. Warping an Object.
 CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
Parallel Implementations of Gaussian Elimination
 s of Western Michigan University vasilije.perovic@wmich.edu January 27, 2012 CS 6260: in Parallel Linear systems of equations General form of a linear system of equations is given by a 11 x 1 + + a 1n
s of Western Michigan University vasilije.perovic@wmich.edu January 27, 2012 CS 6260: in Parallel Linear systems of equations General form of a linear system of equations is given by a 11 x 1 + + a 1n
#$ % $ $& "$%% " $ '$ " '
 ! " This section of the course covers techniques for pairwise (i.e., scanto-scan) and global (i.e., involving more than 2 scans) alignment, given that the algorithms are constrained to obtain a rigid-body
! " This section of the course covers techniques for pairwise (i.e., scanto-scan) and global (i.e., involving more than 2 scans) alignment, given that the algorithms are constrained to obtain a rigid-body
Contents. I Basics 1. Copyright by SIAM. Unauthorized reproduction of this article is prohibited.
 page v Preface xiii I Basics 1 1 Optimization Models 3 1.1 Introduction... 3 1.2 Optimization: An Informal Introduction... 4 1.3 Linear Equations... 7 1.4 Linear Optimization... 10 Exercises... 12 1.5
page v Preface xiii I Basics 1 1 Optimization Models 3 1.1 Introduction... 3 1.2 Optimization: An Informal Introduction... 4 1.3 Linear Equations... 7 1.4 Linear Optimization... 10 Exercises... 12 1.5
CS 664 Structure and Motion. Daniel Huttenlocher
 CS 664 Structure and Motion Daniel Huttenlocher Determining 3D Structure Consider set of 3D points X j seen by set of cameras with projection matrices P i Given only image coordinates x ij of each point
CS 664 Structure and Motion Daniel Huttenlocher Determining 3D Structure Consider set of 3D points X j seen by set of cameras with projection matrices P i Given only image coordinates x ij of each point
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Inverse Kinematics. Given a desired position (p) & orientation (R) of the end-effector
 & orientation (R) of the end-effector") Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse