SMOOTH POLYHEDRAL SURFACES
|
|
|
- Gwenda Booker
- 5 years ago
- Views:
Transcription
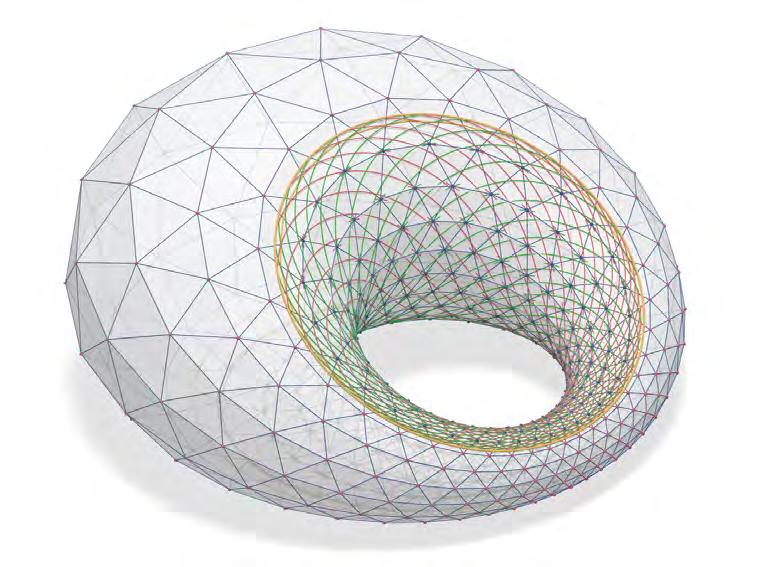
1 SMOOTH POLYHEDRAL SURFACES Felix Günther Université de Genève and Technische Universität Berlin Geometry Workshop in Obergurgl 2017

2 PRELUDE Złote Tarasy shopping mall in Warsaw

3 PRELUDE Złote Tarasy shopping mall in Warsaw

4 PRELUDE Smooth and non-smooth realization of a cone and their Gauss images
5 STORYBOARD Episode I The Phantom Lemma Episode II Attack of the Index Episode III Revenge of the Lemma
6 STORYBOARD Episode I The Phantom Lemma Episode II Attack of the Index Episode III Revenge of the Lemma Episode IV A New Normal Episode V The Gauss Image Strikes Back Episode VI Return of Projective Transformations
7 STORYBOARD Episode I The Phantom Lemma Episode II Attack of the Index Episode III Revenge of the Lemma Episode IV A New Normal Episode V The Gauss Image Strikes Back Episode VI Return of Projective Transformations Episode VII The Applications Awaken
8
9

10 GAUSSIAN CURVATURE
11 DISCRETE GAUSSIAN CURVATURE P N i+1 K(P ) Ni+1 α i N i N i K (P) := 2π i α i
 Ni+1 α i N i N i K (P) := 2π i")
12 DISCRETE GAUSSIAN CURVATURE P N i+1 K(P ) Ni+1 α i N i N i K (P) := 2π i α i

13 MORE COMPLICATED GAUSS IMAGE Self-intersecting Gauss image

14
15 INDEX OF A VERTEX OF A POLYHEDRAL SURFACE
16 INTEGRATED INDEX
17 INTEGRATED INDEX 1 i(v, ξ)dξ = S 2 2 S 2 2 m(v,, ξ) M = 2π M α (v) = K (v)
18 RELATION TO ALGEBRAIC AREA OF GAUSS IMAGE Positive discrete Gaussian curvature
19 RELATION TO ALGEBRAIC AREA OF GAUSS IMAGE Negative discrete Gaussian curvature

20 RELATION TO ALGEBRAIC AREA OF GAUSS IMAGE Gauss image contains pair of antipodal points
21 RELATION TO ALGEBRAIC AREA OF GAUSS IMAGE Index of v with respect to n equals -2
 = w(g(v), n) +")
22 RELATION TO ALGEBRAIC AREA OF GAUSS IMAGE Index of v with respect to n equals -2 i(v, n) = w(g(v), n) + w(g(v), n)
23
24 SPHERICAL ANGLE f = f 2 is not an inflection face: ˆα f = α = π α f

25 SPHERICAL ANGLE f = f 2 is an inflection face: ˆα f = α = 2π α f
26 GAUSS IMAGE WITHOUT SELF-INTERSECTIONS: K>0 ˆα f (n 2)π = K (v) = 2π α f f v f v
27 GAUSS IMAGE WITHOUT SELF-INTERSECTIONS: K>0 ˆα f (n 2)π = K (v) = 2π α f f v f v = ˆα f = α f ) f v f v(π

28 GAUSS IMAGE WITHOUT SELF-INTERSECTIONS: K>0 Convex spherical polygon
29 GAUSS IMAGE WITHOUT SELF-INTERSECTIONS: K<0 f v ˆα f + (n 2)π = K (v) = 2π f v α f
30 GAUSS IMAGE WITHOUT SELF-INTERSECTIONS: K<0 f v ˆα f + (n 2)π = K (v) = 2π f v α f = f v ˆα f = f v(π + α f ) 4π
31 GAUSS IMAGE WITHOUT SELF-INTERSECTIONS: K<0 f v ˆα f + (n 2)π = K (v) = 2π f v α f = f v ˆα f = f v(π + α f ) 4π ˆα f = 2π (π α f ) = π + α f if f is not an inflection face ˆα f = 2π (2π α f ) = α f if f is an inflection face

32 GAUSS IMAGE WITHOUT SELF-INTERSECTIONS: K<0 Spherical pseudo-quadrilateral

33 GAUSS IMAGE WITHOUT SELF-INTERSECTIONS: K<0 Spherical pseudo-triangle (four inflection faces)

34 GAUSS IMAGE WITHOUT SELF-INTERSECTIONS: K<0 Spherical pseudo-triangle (two inflection faces)
35 GAUSS IMAGE WITHOUT SELF-INTERSECTIONS: K<0 Spherical pseudo-digon

36
37 NORMAL VECTOR AND TRANSVERSAL PLANE One-to-one projection of vertex star onto transversal plane

38 DUPIN INDICATRIX Intersection with a plane parallel and close to the tangent plane

39 DISCRETE DUPIN INDICATRIX K>0 Discrete ellipse in convex case
40 DISCRETE DUPIN INDICATRIX K<0 Inflection edge in the discrete Dupin indicatrix

41 DISCRETE DUPIN INDICATRIX K<0 Discrete hyperbola if Gauss image is star-shaped
42 DISCRETE DUPIN INDICATRIX K<0 Discrete hyperbola (four inflection faces)

43 DISCRETE DUPIN INDICATRIX K<0 Discrete hyperbola (two inflection faces)
44

45 GAUSS IMAGES FOR POSITIVE CURVATURE Gauss images do not intersect

46 GAUSS IMAGES FOR NEGATIVE CURVATURE Gauss images do not intersect
47 GAUSS IMAGES FOR NEGATIVE CURVATURE Polyhedral monkey saddle
48 GAUSS IMAGES FOR NEGATIVE CURVATURE Deformation of a monkey saddle
49 SHAPES OF FACES IN NEGATIVELY CURVED AREAS ˆα v = α v + π if α v < π and f 1 is not an inflection face, ˆα v = α v if α v < π and f 1 is an inflection face, ˆα v = α v π if α v > π and f 1 is not an inflection face, ˆα v = α v if α v > π and f 1 is an inflection face.
50 SHAPES OF FACES IN NEGATIVELY CURVED AREAS ˆα v = α v + π if α v < π and f 1 is not an inflection face, ˆα v = α v if α v < π and f 1 is an inflection face, ˆα v = α v π if α v > π and f 1 is not an inflection face, ˆα v = α v if α v > π and f 1 is an inflection face. 2π = v f 1 ˆα v = v f 1 α v + c 1 π c 3 π = (n 2)π + c 1 π c 3 π
51 SHAPES OF FACES IN NEGATIVELY CURVED AREAS ˆα v = α v + π if α v < π and f 1 is not an inflection face, ˆα v = α v if α v < π and f 1 is an inflection face, ˆα v = α v π if α v > π and f 1 is not an inflection face, ˆα v = α v if α v > π and f 1 is an inflection face. 2π = v f 1 ˆα v = v f 1 α v + c 1 π c 3 π = (n 2)π + c 1 π c 3 π Thus, c 1 c 3 = 4 n. Using c 1 + c 2 + c 3 + c 4 = n, 2c 1 + c 2 + c 4 = 4.
52 SHAPES OF FACES IN NEGATIVELY CURVED AREAS ˆα v = α v + π if α v < π and f 1 is not an inflection face, ˆα v = α v if α v < π and f 1 is an inflection face, ˆα v = α v π if α v > π and f 1 is not an inflection face, ˆα v = α v if α v > π and f 1 is an inflection face. 2π = v f 1 ˆα v = v f 1 α v + c 1 π c 3 π = (n 2)π + c 1 π c 3 π Thus, c 1 c 3 = 4 n. Using c 1 + c 2 + c 3 + c 4 = n, 2c 1 + c 2 + c 4 = 4. f 1 planar: c 1 + c 2 3.
53 SHAPES OF FACES IN NEGATIVELY CURVED AREAS c 1 = 0, c 2 = 4, c 3 = n 4, c 4 = 0
54 SHAPES OF FACES IN NEGATIVELY CURVED AREAS c 1 = 0, c 2 = 3, c 3 = n 4, c 4 = 1
55 SHAPES OF FACES IN NEGATIVELY CURVED AREAS c 1 = 1, c 2 = 2, c 3 = n 3, c 4 = 0

56 GAUSS IMAGES FOR MIXED CURVATURE Overlap of Gauss images
57 GAUSS IMAGES FOR MIXED CURVATURE Basic shapes of faces in areas of mixed curvature
58 GAUSS IMAGES FOR MIXED CURVATURE Discrete parabolic curve
59 SMOOTH POLYHEDRAL SURFACE DEFINITION An orientable polyhedral surface P immersed into R 3 is smooth if:
60 SMOOTH POLYHEDRAL SURFACE DEFINITION An orientable polyhedral surface P immersed into R 3 is smooth if: 1 K (v) 0 for all v. For all faces f, the sign of discrete Gaussian curvature changes at either zero or two edges.
61 SMOOTH POLYHEDRAL SURFACE DEFINITION An orientable polyhedral surface P immersed into R 3 is smooth if: 1 K (v) 0 for all v. For all faces f, the sign of discrete Gaussian curvature changes at either zero or two edges. 2 v n, n S 2 such that n, n f > 0 n f, f v, and such that the spherical polygon defined by n f is star-shaped with respect to n.
62 SMOOTH POLYHEDRAL SURFACE DEFINITION An orientable polyhedral surface P immersed into R 3 is smooth if: 1 K (v) 0 for all v. For all faces f, the sign of discrete Gaussian curvature changes at either zero or two edges. 2 v n, n S 2 such that n, n f > 0 n f, f v, and such that the spherical polygon defined by n f is star-shaped with respect to n. 3 f, v f ˆα v is ±2π or 0 depending on whether K (v) has the same sign for all v f or not. In the first case, we demand in addition that f is star-shaped; in the latter case, we require that the convex hull of vertices of positive discrete Gaussian curvature does not contain any vertex of negative curvature.
63
64
65
66
67 NOTION OF SMOOTHNESS IS PROJECTIVELY INVARIANT THEOREM Let P be a smooth polyhedral surface immersed into R 3 RP 3. Furthermore, let π be a projective transformation that does not map any point of P to infinity. Then, π(p) is a smooth polyhedral surface. Furthermore, discrete tangent planes, discrete asymptotic directions, discrete parabolic curves, and points of contact are mapped to the corresponding objects of π(p).

68 PROJECTIVE DUAL SURFACE Projective dual surfaces of smooth polyhedral surfaces are smooth
69
 non-smooth; (b) weakly smooth")
70 RESULTS OF OUR ALGORITHM Optimization started from (a) non-smooth; (b) weakly smooth surface

71 RESULTS OF OUR ALGORITHM Department of Islamic Art within the Musée du Louvre

72 RESULTS OF OUR ALGORITHM Broken images in the reflections

73 RESULTS OF OUR ALGORITHM Optimization of Louvre surface
74
Freeform Architecture and Discrete Differential Geometry. Helmut Pottmann, KAUST
 Freeform Architecture and Discrete Differential Geometry Helmut Pottmann, KAUST Freeform Architecture Motivation: Large scale architectural projects, involving complex freeform geometry Realization challenging
Freeform Architecture and Discrete Differential Geometry Helmut Pottmann, KAUST Freeform Architecture Motivation: Large scale architectural projects, involving complex freeform geometry Realization challenging
274 Curves on Surfaces, Lecture 5
 274 Curves on Surfaces, Lecture 5 Dylan Thurston Notes by Qiaochu Yuan Fall 2012 5 Ideal polygons Previously we discussed three models of the hyperbolic plane: the Poincaré disk, the upper half-plane,
274 Curves on Surfaces, Lecture 5 Dylan Thurston Notes by Qiaochu Yuan Fall 2012 5 Ideal polygons Previously we discussed three models of the hyperbolic plane: the Poincaré disk, the upper half-plane,
Designing Cylinders with Constant Negative Curvature
 Designing Cylinders with Constant Negative Curvature Ulrich Pinkall Abstract. We describe algorithms that can be used to interactively construct ( design ) surfaces with constant negative curvature, in
Designing Cylinders with Constant Negative Curvature Ulrich Pinkall Abstract. We describe algorithms that can be used to interactively construct ( design ) surfaces with constant negative curvature, in
CS 177 Homework 1. Julian Panetta. October 22, We want to show for any polygonal disk consisting of vertex set V, edge set E, and face set F:
 CS 177 Homework 1 Julian Panetta October, 009 1 Euler Characteristic 1.1 Polyhedral Formula We want to show for any polygonal disk consisting of vertex set V, edge set E, and face set F: V E + F = 1 First,
CS 177 Homework 1 Julian Panetta October, 009 1 Euler Characteristic 1.1 Polyhedral Formula We want to show for any polygonal disk consisting of vertex set V, edge set E, and face set F: V E + F = 1 First,
Lectures 19: The Gauss-Bonnet Theorem I. Table of contents
 Math 348 Fall 07 Lectures 9: The Gauss-Bonnet Theorem I Disclaimer. As we have a textbook, this lecture note is for guidance and supplement only. It should not be relied on when preparing for exams. In
Math 348 Fall 07 Lectures 9: The Gauss-Bonnet Theorem I Disclaimer. As we have a textbook, this lecture note is for guidance and supplement only. It should not be relied on when preparing for exams. In
Optimal (local) Triangulation of Hyperbolic Paraboloids
 Triangulation of Hyperbolic Paraboloids") Optimal (local) Triangulation of Hyperbolic Paraboloids Dror Atariah Günter Rote Freie Universität Berlin December 14 th 2012 Outline Introduction Taylor Expansion Quadratic Surfaces Vertical Distance
Optimal (local) Triangulation of Hyperbolic Paraboloids Dror Atariah Günter Rote Freie Universität Berlin December 14 th 2012 Outline Introduction Taylor Expansion Quadratic Surfaces Vertical Distance
Discrete Minimal Surfaces using P-Hex Meshes
 Discrete Minimal Surfaces using P-Hex Meshes Diplomarbeit zur Erlangung des akademischen Grades Diplom-Mathematikerin vorgelegt von: Jill Bucher Matrikel-Nr.: 4182388 Email: Fachbereich: Betreuer: jill.bucher@math.fu-berlin.de
Discrete Minimal Surfaces using P-Hex Meshes Diplomarbeit zur Erlangung des akademischen Grades Diplom-Mathematikerin vorgelegt von: Jill Bucher Matrikel-Nr.: 4182388 Email: Fachbereich: Betreuer: jill.bucher@math.fu-berlin.de
Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder]
![Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder]](/thumbs/93/111713975.jpg "Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder]") Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder] Preliminaries Recall: Given a smooth function f:r R, the function
Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder] Preliminaries Recall: Given a smooth function f:r R, the function
Shape Modeling and Geometry Processing
 252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
Shape Modeling. Differential Geometry Primer Smooth Definitions Discrete Theory in a Nutshell. CS 523: Computer Graphics, Spring 2011
 CS 523: Computer Graphics, Spring 2011 Shape Modeling Differential Geometry Primer Smooth Definitions Discrete Theory in a Nutshell 2/15/2011 1 Motivation Geometry processing: understand geometric characteristics,
CS 523: Computer Graphics, Spring 2011 Shape Modeling Differential Geometry Primer Smooth Definitions Discrete Theory in a Nutshell 2/15/2011 1 Motivation Geometry processing: understand geometric characteristics,
Two Connections between Combinatorial and Differential Geometry
 Two Connections between Combinatorial and Differential Geometry John M. Sullivan Institut für Mathematik, Technische Universität Berlin Berlin Mathematical School DFG Research Group Polyhedral Surfaces
Two Connections between Combinatorial and Differential Geometry John M. Sullivan Institut für Mathematik, Technische Universität Berlin Berlin Mathematical School DFG Research Group Polyhedral Surfaces
(Discrete) Differential Geometry
 Differential Geometry") (Discrete) Differential Geometry Motivation Understand the structure of the surface Properties: smoothness, curviness, important directions How to modify the surface to change these properties What properties
(Discrete) Differential Geometry Motivation Understand the structure of the surface Properties: smoothness, curviness, important directions How to modify the surface to change these properties What properties
CS 523: Computer Graphics, Spring Differential Geometry of Surfaces
 CS 523: Computer Graphics, Spring 2009 Shape Modeling Differential Geometry of Surfaces Andrew Nealen, Rutgers, 2009 3/4/2009 Recap Differential Geometry of Curves Andrew Nealen, Rutgers, 2009 3/4/2009
CS 523: Computer Graphics, Spring 2009 Shape Modeling Differential Geometry of Surfaces Andrew Nealen, Rutgers, 2009 3/4/2009 Recap Differential Geometry of Curves Andrew Nealen, Rutgers, 2009 3/4/2009
Advanced Algorithms Computational Geometry Prof. Karen Daniels. Fall, 2012
 UMass Lowell Computer Science 91.504 Advanced Algorithms Computational Geometry Prof. Karen Daniels Fall, 2012 Voronoi Diagrams & Delaunay Triangulations O Rourke: Chapter 5 de Berg et al.: Chapters 7,
UMass Lowell Computer Science 91.504 Advanced Algorithms Computational Geometry Prof. Karen Daniels Fall, 2012 Voronoi Diagrams & Delaunay Triangulations O Rourke: Chapter 5 de Berg et al.: Chapters 7,
CS 523: Computer Graphics, Spring Shape Modeling. Differential Geometry of Surfaces
 CS 523: Computer Graphics, Spring 2011 Shape Modeling Differential Geometry of Surfaces Andrew Nealen, Rutgers, 2011 2/22/2011 Differential Geometry of Surfaces Continuous and Discrete Motivation Smoothness
CS 523: Computer Graphics, Spring 2011 Shape Modeling Differential Geometry of Surfaces Andrew Nealen, Rutgers, 2011 2/22/2011 Differential Geometry of Surfaces Continuous and Discrete Motivation Smoothness
Lectures in Discrete Differential Geometry 3 Discrete Surfaces
 Lectures in Discrete Differential Geometry 3 Discrete Surfaces Etienne Vouga March 19, 2014 1 Triangle Meshes We will now study discrete surfaces and build up a parallel theory of curvature that mimics
Lectures in Discrete Differential Geometry 3 Discrete Surfaces Etienne Vouga March 19, 2014 1 Triangle Meshes We will now study discrete surfaces and build up a parallel theory of curvature that mimics
Hyplane Polyhedral Models of Hyperbolic Plane
 Original Paper Forma, 21, 5 18, 2006 Hyplane Polyhedral Models of Hyperbolic Plane Kazushi AHARA Department of Mathematics School of Science and Technology, Meiji University, 1-1-1 Higashi-mita, Tama-ku,
Original Paper Forma, 21, 5 18, 2006 Hyplane Polyhedral Models of Hyperbolic Plane Kazushi AHARA Department of Mathematics School of Science and Technology, Meiji University, 1-1-1 Higashi-mita, Tama-ku,
Planar quad meshes from relative principal curvature lines
 Planar quad meshes from relative principal curvature lines Alexander Schiftner Institute of Discrete Mathematics and Geometry Vienna University of Technology 15.09.2007 Alexander Schiftner (TU Vienna)
Planar quad meshes from relative principal curvature lines Alexander Schiftner Institute of Discrete Mathematics and Geometry Vienna University of Technology 15.09.2007 Alexander Schiftner (TU Vienna)
Discrete minimal surfaces of Koebe type
 Discrete minimal surfaces of Koebe type Alexander I. Bobenko, Ulrike Bücking, Stefan Sechelmann March 5, 2018 1 Introduction Minimal surfaces have been studied for a long time, but still contain unsolved
Discrete minimal surfaces of Koebe type Alexander I. Bobenko, Ulrike Bücking, Stefan Sechelmann March 5, 2018 1 Introduction Minimal surfaces have been studied for a long time, but still contain unsolved
The Contribution of Discrete Differential Geometry to Contemporary Architecture
 The Contribution of Discrete Differential Geometry to Contemporary Architecture Helmut Pottmann Vienna University of Technology, Austria 1 Project in Seoul, Hadid Architects 2 Lilium Tower Warsaw, Hadid
The Contribution of Discrete Differential Geometry to Contemporary Architecture Helmut Pottmann Vienna University of Technology, Austria 1 Project in Seoul, Hadid Architects 2 Lilium Tower Warsaw, Hadid
A GEOMETRIC APPROACH TO CURVATURE ESTIMATION ON TRIANGULATED 3D SHAPES
 A GEOMETRIC APPROACH TO CURVATURE ESTIMATION ON TRIANGULATED 3D SHAPES Mohammed Mostefa Mesmoudi, Leila De Floriani, Paola Magillo Department of Computer Science and Information Science (DISI), University
A GEOMETRIC APPROACH TO CURVATURE ESTIMATION ON TRIANGULATED 3D SHAPES Mohammed Mostefa Mesmoudi, Leila De Floriani, Paola Magillo Department of Computer Science and Information Science (DISI), University
Surfaces: notes on Geometry & Topology
 Surfaces: notes on Geometry & Topology 1 Surfaces A 2-dimensional region of 3D space A portion of space having length and breadth but no thickness 2 Defining Surfaces Analytically... Parametric surfaces
Surfaces: notes on Geometry & Topology 1 Surfaces A 2-dimensional region of 3D space A portion of space having length and breadth but no thickness 2 Defining Surfaces Analytically... Parametric surfaces
Conic Sections. College Algebra
 Conic Sections College Algebra Conic Sections A conic section, or conic, is a shape resulting from intersecting a right circular cone with a plane. The angle at which the plane intersects the cone determines
Conic Sections College Algebra Conic Sections A conic section, or conic, is a shape resulting from intersecting a right circular cone with a plane. The angle at which the plane intersects the cone determines
Curvature Berkeley Math Circle January 08, 2013
 Curvature Berkeley Math Circle January 08, 2013 Linda Green linda@marinmathcircle.org Parts of this handout are taken from Geometry and the Imagination by John Conway, Peter Doyle, Jane Gilman, and Bill
Curvature Berkeley Math Circle January 08, 2013 Linda Green linda@marinmathcircle.org Parts of this handout are taken from Geometry and the Imagination by John Conway, Peter Doyle, Jane Gilman, and Bill
Rational Bezier Curves
 Rational Bezier Curves Use of homogeneous coordinates Rational spline curve: define a curve in one higher dimension space, project it down on the homogenizing variable Mathematical formulation: n P(u)
Rational Bezier Curves Use of homogeneous coordinates Rational spline curve: define a curve in one higher dimension space, project it down on the homogenizing variable Mathematical formulation: n P(u)
ALGEBRA II UNIT X: Conic Sections Unit Notes Packet
 Name: Period: ALGEBRA II UNIT X: Conic Sections Unit Notes Packet Algebra II Unit 10 Plan: This plan is subject to change at the teacher s discretion. Section Topic Formative Work Due Date 10.3 Circles
Name: Period: ALGEBRA II UNIT X: Conic Sections Unit Notes Packet Algebra II Unit 10 Plan: This plan is subject to change at the teacher s discretion. Section Topic Formative Work Due Date 10.3 Circles
Discrete differential geometry: Surfaces made from Circles
 Discrete differential geometry: Alexander Bobenko (TU Berlin) with help of Tim Hoffmann, Boris Springborn, Ulrich Pinkall, Ulrike Scheerer, Daniel Matthes, Yuri Suris, Kevin Bauer Papers A.I. Bobenko,
Discrete differential geometry: Alexander Bobenko (TU Berlin) with help of Tim Hoffmann, Boris Springborn, Ulrich Pinkall, Ulrike Scheerer, Daniel Matthes, Yuri Suris, Kevin Bauer Papers A.I. Bobenko,
05 - Surfaces. Acknowledgements: Olga Sorkine-Hornung. CSCI-GA Geometric Modeling - Daniele Panozzo
 05 - Surfaces Acknowledgements: Olga Sorkine-Hornung Reminder Curves Turning Number Theorem Continuous world Discrete world k: Curvature is scale dependent is scale-independent Discrete Curvature Integrated
05 - Surfaces Acknowledgements: Olga Sorkine-Hornung Reminder Curves Turning Number Theorem Continuous world Discrete world k: Curvature is scale dependent is scale-independent Discrete Curvature Integrated
Curvatures of Smooth and Discrete Surfaces
 Curvatures of Smooth and iscrete Surfaces John M. Sullivan The curvatures of a smooth curve or surface are local measures of its shape. Here we consider analogous quantities for discrete curves and surfaces,
Curvatures of Smooth and iscrete Surfaces John M. Sullivan The curvatures of a smooth curve or surface are local measures of its shape. Here we consider analogous quantities for discrete curves and surfaces,
Convex Hulls (3D) O Rourke, Chapter 4
 O Rourke, Chapter 4") Convex Hulls (3D) O Rourke, Chapter 4 Outline Polyhedra Polytopes Euler Characteristic (Oriented) Mesh Representation Polyhedra Definition: A polyhedron is a solid region in 3D space whose boundary is
Convex Hulls (3D) O Rourke, Chapter 4 Outline Polyhedra Polytopes Euler Characteristic (Oriented) Mesh Representation Polyhedra Definition: A polyhedron is a solid region in 3D space whose boundary is
Impulse Gauss Curvatures 2002 SSHE-MA Conference. Howard Iseri Mansfield University
 Impulse Gauss Curvatures 2002 SSHE-MA Conference Howard Iseri Mansfield University Abstract: In Riemannian (differential) geometry, the differences between Euclidean geometry, elliptic geometry, and hyperbolic
Impulse Gauss Curvatures 2002 SSHE-MA Conference Howard Iseri Mansfield University Abstract: In Riemannian (differential) geometry, the differences between Euclidean geometry, elliptic geometry, and hyperbolic
1/25 Warm Up Find the value of the indicated measure
 1/25 Warm Up Find the value of the indicated measure. 1. 2. 3. 4. Lesson 7.1(2 Days) Angles of Polygons Essential Question: What is the sum of the measures of the interior angles of a polygon? What you
1/25 Warm Up Find the value of the indicated measure. 1. 2. 3. 4. Lesson 7.1(2 Days) Angles of Polygons Essential Question: What is the sum of the measures of the interior angles of a polygon? What you
Digital Geometry Processing Parameterization I
 Problem Definition Given a surface (mesh) S in R 3 and a domain find a bective F: S Typical Domains Cutting to a Disk disk = genus zero + boundary sphere = closed genus zero Creates artificial boundary
Problem Definition Given a surface (mesh) S in R 3 and a domain find a bective F: S Typical Domains Cutting to a Disk disk = genus zero + boundary sphere = closed genus zero Creates artificial boundary
04 - Normal Estimation, Curves
 04 - Normal Estimation, Curves Acknowledgements: Olga Sorkine-Hornung Normal Estimation Implicit Surface Reconstruction Implicit function from point clouds Need consistently oriented normals < 0 0 > 0
04 - Normal Estimation, Curves Acknowledgements: Olga Sorkine-Hornung Normal Estimation Implicit Surface Reconstruction Implicit function from point clouds Need consistently oriented normals < 0 0 > 0
Tutorial 3 Comparing Biological Shapes Patrice Koehl and Joel Hass
 Tutorial 3 Comparing Biological Shapes Patrice Koehl and Joel Hass University of California, Davis, USA http://www.cs.ucdavis.edu/~koehl/ims2017/ What is a shape? A shape is a 2-manifold with a Riemannian
Tutorial 3 Comparing Biological Shapes Patrice Koehl and Joel Hass University of California, Davis, USA http://www.cs.ucdavis.edu/~koehl/ims2017/ What is a shape? A shape is a 2-manifold with a Riemannian
Counting Double Tangents of Closed Curves Without Inflection Points
 Counting Double Tangents of Closed Curves Without Inflection Points EMILY SUSAN MACWAY UNDERGRADUATE HONORS THESIS FACULTY ADVISOR: ABIGAIL THOMPSON JUNE 2014 UNIVERSITY OF CALIFORNIA, DAVIS COLLEGE OF
Counting Double Tangents of Closed Curves Without Inflection Points EMILY SUSAN MACWAY UNDERGRADUATE HONORS THESIS FACULTY ADVISOR: ABIGAIL THOMPSON JUNE 2014 UNIVERSITY OF CALIFORNIA, DAVIS COLLEGE OF
3D Modeling Parametric Curves & Surfaces
 3D Modeling Parametric Curves & Surfaces Shandong University Spring 2012 3D Object Representations Raw data Point cloud Range image Polygon soup Solids Voxels BSP tree CSG Sweep Surfaces Mesh Subdivision
3D Modeling Parametric Curves & Surfaces Shandong University Spring 2012 3D Object Representations Raw data Point cloud Range image Polygon soup Solids Voxels BSP tree CSG Sweep Surfaces Mesh Subdivision
Tightness for Smooth and Polyhedral Immersions of the Projective Plane with One Handle
 Tight and Taut Submanifolds MSRI Publications Volume 32, 1997 Tightness for Smooth and Polyhedral Immersions of the Projective Plane with One Handle DAVIDE P. CERVONE Abstract. The recent discovery that
Tight and Taut Submanifolds MSRI Publications Volume 32, 1997 Tightness for Smooth and Polyhedral Immersions of the Projective Plane with One Handle DAVIDE P. CERVONE Abstract. The recent discovery that
Unit 12 Topics in Analytic Geometry - Classwork
 Unit 1 Topics in Analytic Geometry - Classwork Back in Unit 7, we delved into the algebra and geometry of lines. We showed that lines can be written in several forms: a) the general form: Ax + By + C =
Unit 1 Topics in Analytic Geometry - Classwork Back in Unit 7, we delved into the algebra and geometry of lines. We showed that lines can be written in several forms: a) the general form: Ax + By + C =
A Polyhedral Model in Euclidean 3-Space of the Six-Pentagon Map of the Projective Plane
 Discrete Comput Geom (2008) 40: 395 400 DOI 10.1007/s00454-007-9033-y A Polyhedral Model in Euclidean 3-Space of the Six-Pentagon Map of the Projective Plane Lajos Szilassi Received: 14 February 2007 /
Discrete Comput Geom (2008) 40: 395 400 DOI 10.1007/s00454-007-9033-y A Polyhedral Model in Euclidean 3-Space of the Six-Pentagon Map of the Projective Plane Lajos Szilassi Received: 14 February 2007 /
Generalized barycentric coordinates
 Generalized barycentric coordinates Michael S. Floater August 20, 2012 In this lecture, we review the definitions and properties of barycentric coordinates on triangles, and study generalizations to convex,
Generalized barycentric coordinates Michael S. Floater August 20, 2012 In this lecture, we review the definitions and properties of barycentric coordinates on triangles, and study generalizations to convex,
How to Project Spherical Conics into the Plane
 How to Project pherical Conics into the Plane Yoichi Maeda maeda@keyakiccu-tokaiacjp Department of Mathematics Tokai University Japan Abstract: In this paper, we will introduce a method how to draw the
How to Project pherical Conics into the Plane Yoichi Maeda maeda@keyakiccu-tokaiacjp Department of Mathematics Tokai University Japan Abstract: In this paper, we will introduce a method how to draw the
CURVES AND SURFACES, S.L. Rueda SUPERFACES. 2.3 Ruled Surfaces
 SUPERFACES. 2.3 Ruled Surfaces Definition A ruled surface S, is a surface that contains at least one uniparametric family of lines. That is, it admits a parametrization of the next kind α : D R 2 R 3 α(u,
SUPERFACES. 2.3 Ruled Surfaces Definition A ruled surface S, is a surface that contains at least one uniparametric family of lines. That is, it admits a parametrization of the next kind α : D R 2 R 3 α(u,
Geometry of Flat Surfaces
 Geometry of Flat Surfaces Marcelo iana IMPA - Rio de Janeiro Xi an Jiaotong University 2005 Geometry of Flat Surfaces p.1/43 Some (non-flat) surfaces Sphere (g = 0) Torus (g = 1) Bitorus (g = 2) Geometry
Geometry of Flat Surfaces Marcelo iana IMPA - Rio de Janeiro Xi an Jiaotong University 2005 Geometry of Flat Surfaces p.1/43 Some (non-flat) surfaces Sphere (g = 0) Torus (g = 1) Bitorus (g = 2) Geometry
3D Modeling Parametric Curves & Surfaces. Shandong University Spring 2013
 3D Modeling Parametric Curves & Surfaces Shandong University Spring 2013 3D Object Representations Raw data Point cloud Range image Polygon soup Surfaces Mesh Subdivision Parametric Implicit Solids Voxels
3D Modeling Parametric Curves & Surfaces Shandong University Spring 2013 3D Object Representations Raw data Point cloud Range image Polygon soup Surfaces Mesh Subdivision Parametric Implicit Solids Voxels
An Introduction to Geometrical Probability
 An Introduction to Geometrical Probability Distributional Aspects with Applications A. M. Mathai McGill University Montreal, Canada Gordon and Breach Science Publishers Australia Canada China Prance Germany
An Introduction to Geometrical Probability Distributional Aspects with Applications A. M. Mathai McGill University Montreal, Canada Gordon and Breach Science Publishers Australia Canada China Prance Germany
Lesson 7.1. Angles of Polygons
 Lesson 7.1 Angles of Polygons Essential Question: How can I find the sum of the measures of the interior angles of a polygon? Polygon A plane figure made of three or more segments (sides). Each side intersects
Lesson 7.1 Angles of Polygons Essential Question: How can I find the sum of the measures of the interior angles of a polygon? Polygon A plane figure made of three or more segments (sides). Each side intersects
Multivariable Calculus
 Multivariable Calculus Chapter 10 Topics in Analytic Geometry (Optional) 1. Inclination of a line p. 5. Circles p. 4 9. Determining Conic Type p. 13. Angle between lines p. 6. Parabolas p. 5 10. Rotation
Multivariable Calculus Chapter 10 Topics in Analytic Geometry (Optional) 1. Inclination of a line p. 5. Circles p. 4 9. Determining Conic Type p. 13. Angle between lines p. 6. Parabolas p. 5 10. Rotation
Euler s Theorem. Brett Chenoweth. February 26, 2013
 Euler s Theorem Brett Chenoweth February 26, 2013 1 Introduction This summer I have spent six weeks of my holidays working on a research project funded by the AMSI. The title of my project was Euler s
Euler s Theorem Brett Chenoweth February 26, 2013 1 Introduction This summer I have spent six weeks of my holidays working on a research project funded by the AMSI. The title of my project was Euler s
THE DNA INEQUALITY POWER ROUND
 THE DNA INEQUALITY POWER ROUND Instructions Write/draw all solutions neatly, with at most one question per page, clearly numbered. Turn in the solutions in numerical order, with your team name at the upper
THE DNA INEQUALITY POWER ROUND Instructions Write/draw all solutions neatly, with at most one question per page, clearly numbered. Turn in the solutions in numerical order, with your team name at the upper
Tripod Configurations
 Tripod Configurations Eric Chen, Nick Lourie, Nakul Luthra Summer@ICERM 2013 August 8, 2013 Eric Chen, Nick Lourie, Nakul Luthra (S@I) Tripod Configurations August 8, 2013 1 / 33 Overview 1 Introduction
Tripod Configurations Eric Chen, Nick Lourie, Nakul Luthra Summer@ICERM 2013 August 8, 2013 Eric Chen, Nick Lourie, Nakul Luthra (S@I) Tripod Configurations August 8, 2013 1 / 33 Overview 1 Introduction
EM225 Projective Geometry Part 2
 EM225 Projective Geometry Part 2 eview In projective geometry, we regard figures as being the same if they can be made to appear the same as in the diagram below. In projective geometry: a projective point
EM225 Projective Geometry Part 2 eview In projective geometry, we regard figures as being the same if they can be made to appear the same as in the diagram below. In projective geometry: a projective point
William P. Thurston. The Geometry and Topology of Three-Manifolds
 William P. Thurston The Geometry and Topology of Three-Manifolds Electronic version 1.1 - March 2002 http://www.msri.org/publications/books/gt3m/ This is an electronic edition of the 1980 notes distributed
William P. Thurston The Geometry and Topology of Three-Manifolds Electronic version 1.1 - March 2002 http://www.msri.org/publications/books/gt3m/ This is an electronic edition of the 1980 notes distributed
Mathematics High School Geometry An understanding of the attributes and relationships of geometric objects can be applied in diverse contexts
 Mathematics High School Geometry An understanding of the attributes and relationships of geometric objects can be applied in diverse contexts interpreting a schematic drawing, estimating the amount of
Mathematics High School Geometry An understanding of the attributes and relationships of geometric objects can be applied in diverse contexts interpreting a schematic drawing, estimating the amount of
Other Voronoi/Delaunay Structures
 Other Voronoi/Delaunay Structures Overview Alpha hulls (a subset of Delaunay graph) Extension of Voronoi Diagrams Convex Hull What is it good for? The bounding region of a point set Not so good for describing
Other Voronoi/Delaunay Structures Overview Alpha hulls (a subset of Delaunay graph) Extension of Voronoi Diagrams Convex Hull What is it good for? The bounding region of a point set Not so good for describing
Greedy Routing in Wireless Networks. Jie Gao Stony Brook University
 Greedy Routing in Wireless Networks Jie Gao Stony Brook University A generic sensor node CPU. On-board flash memory or external memory Sensors: thermometer, camera, motion, light sensor, etc. Wireless
Greedy Routing in Wireless Networks Jie Gao Stony Brook University A generic sensor node CPU. On-board flash memory or external memory Sensors: thermometer, camera, motion, light sensor, etc. Wireless
Chapter 10. Exploring Conic Sections
 Chapter 10 Exploring Conic Sections Conics A conic section is a curve formed by the intersection of a plane and a hollow cone. Each of these shapes are made by slicing the cone and observing the shape
Chapter 10 Exploring Conic Sections Conics A conic section is a curve formed by the intersection of a plane and a hollow cone. Each of these shapes are made by slicing the cone and observing the shape
Geometry. Cluster: Experiment with transformations in the plane. G.CO.1 G.CO.2. Common Core Institute
 Geometry Cluster: Experiment with transformations in the plane. G.CO.1: Know precise definitions of angle, circle, perpendicular line, parallel line, and line segment, based on the undefined notions of
Geometry Cluster: Experiment with transformations in the plane. G.CO.1: Know precise definitions of angle, circle, perpendicular line, parallel line, and line segment, based on the undefined notions of
EXPERIENCING GEOMETRY
 EXPERIENCING GEOMETRY EUCLIDEAN AND NON-EUCLIDEAN WITH HISTORY THIRD EDITION David W. Henderson Daina Taimina Cornell University, Ithaca, New York PEARSON Prentice Hall Upper Saddle River, New Jersey 07458
EXPERIENCING GEOMETRY EUCLIDEAN AND NON-EUCLIDEAN WITH HISTORY THIRD EDITION David W. Henderson Daina Taimina Cornell University, Ithaca, New York PEARSON Prentice Hall Upper Saddle River, New Jersey 07458
Make geometric constructions. (Formalize and explain processes)
") Standard 5: Geometry Pre-Algebra Plus Algebra Geometry Algebra II Fourth Course Benchmark 1 - Benchmark 1 - Benchmark 1 - Part 3 Draw construct, and describe geometrical figures and describe the relationships
Standard 5: Geometry Pre-Algebra Plus Algebra Geometry Algebra II Fourth Course Benchmark 1 - Benchmark 1 - Benchmark 1 - Part 3 Draw construct, and describe geometrical figures and describe the relationships
Henneberg construction
 Henneberg construction Seminar über Algorithmen FU-Berlin, WS 2007/08 Andrei Haralevich Abstract: In this work will be explained two different types of steps of Henneberg construction. And how Henneberg
Henneberg construction Seminar über Algorithmen FU-Berlin, WS 2007/08 Andrei Haralevich Abstract: In this work will be explained two different types of steps of Henneberg construction. And how Henneberg
1 Descartes' Analogy
 Ellipse Line Paraboloid Parabola Descartes' Analogy www.magicmathworks.org/geomlab Hyperbola Hyperboloid Hyperbolic paraboloid Sphere Cone Cylinder Circle The total angle defect for a polygon is 360 ;
Ellipse Line Paraboloid Parabola Descartes' Analogy www.magicmathworks.org/geomlab Hyperbola Hyperboloid Hyperbolic paraboloid Sphere Cone Cylinder Circle The total angle defect for a polygon is 360 ;
CAT(0)-spaces. Münster, June 22, 2004
-spaces. Münster, June 22, 2004") CAT(0)-spaces Münster, June 22, 2004 CAT(0)-space is a term invented by Gromov. Also, called Hadamard space. Roughly, a space which is nonpositively curved and simply connected. C = Comparison or Cartan
CAT(0)-spaces Münster, June 22, 2004 CAT(0)-space is a term invented by Gromov. Also, called Hadamard space. Roughly, a space which is nonpositively curved and simply connected. C = Comparison or Cartan
#97 Curvature Evaluation of Faceted Models for Optimal Milling Direction
 #97 Curvature Evaluation of Faceted Models for Optimal Milling Direction Gandjar Kiswanto, Priadhana Edi Kreshna Department of Mechanical Engineering University of Indonesia Kampus Baru UI Depok 644 Phone
#97 Curvature Evaluation of Faceted Models for Optimal Milling Direction Gandjar Kiswanto, Priadhana Edi Kreshna Department of Mechanical Engineering University of Indonesia Kampus Baru UI Depok 644 Phone
A Conformal Energy for Simplicial Surfaces
 Combinatorial and Computational Geometry MSRI Publications Volume 52, 2005 A Conformal Energy for Simplicial Surfaces ALEXANDER I. BOBENKO Abstract. A new functional for simplicial surfaces is suggested.
Combinatorial and Computational Geometry MSRI Publications Volume 52, 2005 A Conformal Energy for Simplicial Surfaces ALEXANDER I. BOBENKO Abstract. A new functional for simplicial surfaces is suggested.
Mathematics High School Geometry
 Mathematics High School Geometry An understanding of the attributes and relationships of geometric objects can be applied in diverse contexts interpreting a schematic drawing, estimating the amount of
Mathematics High School Geometry An understanding of the attributes and relationships of geometric objects can be applied in diverse contexts interpreting a schematic drawing, estimating the amount of
= secant lines of the n+1 unit circle divisions (d)
") The logarithm of is a complex number such that. In my theory, I represent as the complex number, which is the same as Euler s, where Taking it a step further with, you get a complex number and its conjugate
The logarithm of is a complex number such that. In my theory, I represent as the complex number, which is the same as Euler s, where Taking it a step further with, you get a complex number and its conjugate
A barrier on convex cones with parameter equal to the dimension
 A barrier on convex cones with parameter equal to the dimension Université Grenoble 1 / CNRS August 23 / ISMP 2012, Berlin Outline 1 Universal barrier 2 Projective images of barriers Pseudo-metric on the
A barrier on convex cones with parameter equal to the dimension Université Grenoble 1 / CNRS August 23 / ISMP 2012, Berlin Outline 1 Universal barrier 2 Projective images of barriers Pseudo-metric on the
Geodesic and curvature of piecewise flat Finsler surfaces
 Geodesic and curvature of piecewise flat Finsler surfaces Ming Xu Capital Normal University (based on a joint work with S. Deng) in Southwest Jiaotong University, Emei, July 2018 Outline 1 Background Definition
Geodesic and curvature of piecewise flat Finsler surfaces Ming Xu Capital Normal University (based on a joint work with S. Deng) in Southwest Jiaotong University, Emei, July 2018 Outline 1 Background Definition
Preliminary Mathematics of Geometric Modeling (3)
") Preliminary Mathematics of Geometric Modeling (3) Hongxin Zhang and Jieqing Feng 2006-11-27 State Key Lab of CAD&CG, Zhejiang University Differential Geometry of Surfaces Tangent plane and surface normal
Preliminary Mathematics of Geometric Modeling (3) Hongxin Zhang and Jieqing Feng 2006-11-27 State Key Lab of CAD&CG, Zhejiang University Differential Geometry of Surfaces Tangent plane and surface normal
Click the mouse button or press the Space Bar to display the answers.
 Click the mouse button or press the Space Bar to display the answers. 9-4 Objectives You will learn to: Identify regular tessellations. Vocabulary Tessellation Regular Tessellation Uniform Semi-Regular
Click the mouse button or press the Space Bar to display the answers. 9-4 Objectives You will learn to: Identify regular tessellations. Vocabulary Tessellation Regular Tessellation Uniform Semi-Regular
66 III Complexes. R p (r) }.
 }.") 66 III Complexes III.4 Alpha Complexes In this section, we use a radius constraint to introduce a family of subcomplexes of the Delaunay complex. These complexes are similar to the Čech complexes but differ
66 III Complexes III.4 Alpha Complexes In this section, we use a radius constraint to introduce a family of subcomplexes of the Delaunay complex. These complexes are similar to the Čech complexes but differ
Lecture 0: Reivew of some basic material
 Lecture 0: Reivew of some basic material September 12, 2018 1 Background material on the homotopy category We begin with the topological category TOP, whose objects are topological spaces and whose morphisms
Lecture 0: Reivew of some basic material September 12, 2018 1 Background material on the homotopy category We begin with the topological category TOP, whose objects are topological spaces and whose morphisms
From isothermic triangulated surfaces to discrete holomorphicity
 From isothermic triangulated surfaces to discrete holomorphicity Wai Yeung Lam TU Berlin Oberwolfach, 2 March 2015 Joint work with Ulrich Pinkall Wai Yeung Lam (TU Berlin) isothermic triangulated surfaces
From isothermic triangulated surfaces to discrete holomorphicity Wai Yeung Lam TU Berlin Oberwolfach, 2 March 2015 Joint work with Ulrich Pinkall Wai Yeung Lam (TU Berlin) isothermic triangulated surfaces
Shape Control of Cubic H-Bézier Curve by Moving Control Point
 Journal of Information & Computational Science 4: 2 (2007) 871 878 Available at http://www.joics.com Shape Control of Cubic H-Bézier Curve by Moving Control Point Hongyan Zhao a,b, Guojin Wang a,b, a Department
Journal of Information & Computational Science 4: 2 (2007) 871 878 Available at http://www.joics.com Shape Control of Cubic H-Bézier Curve by Moving Control Point Hongyan Zhao a,b, Guojin Wang a,b, a Department
Research in Computational Differential Geomet
 Research in Computational Differential Geometry November 5, 2014 Approximations Often we have a series of approximations which we think are getting close to looking like some shape. Approximations Often
Research in Computational Differential Geometry November 5, 2014 Approximations Often we have a series of approximations which we think are getting close to looking like some shape. Approximations Often
We have set up our axioms to deal with the geometry of space but have not yet developed these ideas much. Let s redress that imbalance.
 Solid geometry We have set up our axioms to deal with the geometry of space but have not yet developed these ideas much. Let s redress that imbalance. First, note that everything we have proven for the
Solid geometry We have set up our axioms to deal with the geometry of space but have not yet developed these ideas much. Let s redress that imbalance. First, note that everything we have proven for the
L-CONVEX-CONCAVE SETS IN REAL PROJECTIVE SPACE AND L-DUALITY
 MOSCOW MATHEMATICAL JOURNAL Volume 3, Number 3, July September 2003, Pages 1013 1037 L-CONVEX-CONCAVE SETS IN REAL PROJECTIVE SPACE AND L-DUALITY A. KHOVANSKII AND D. NOVIKOV Dedicated to Vladimir Igorevich
MOSCOW MATHEMATICAL JOURNAL Volume 3, Number 3, July September 2003, Pages 1013 1037 L-CONVEX-CONCAVE SETS IN REAL PROJECTIVE SPACE AND L-DUALITY A. KHOVANSKII AND D. NOVIKOV Dedicated to Vladimir Igorevich
Put your initials on the top of every page, in case the pages become separated.
 Math 1201, Fall 2016 Name (print): Dr. Jo Nelson s Calculus III Practice for 1/2 of Final, Midterm 1 Material Time Limit: 90 minutes DO NOT OPEN THIS BOOKLET UNTIL INSTRUCTED TO DO SO. This exam contains
Math 1201, Fall 2016 Name (print): Dr. Jo Nelson s Calculus III Practice for 1/2 of Final, Midterm 1 Material Time Limit: 90 minutes DO NOT OPEN THIS BOOKLET UNTIL INSTRUCTED TO DO SO. This exam contains
6-1 Properties and Attributes of Polygons
 6-1 Properties and Attributes of Polygons Warm Up Lesson Presentation Lesson Quiz Geometry Warm Up 1. A? is a three-sided polygon. triangle 2. A? is a four-sided polygon. quadrilateral Evaluate each expression
6-1 Properties and Attributes of Polygons Warm Up Lesson Presentation Lesson Quiz Geometry Warm Up 1. A? is a three-sided polygon. triangle 2. A? is a four-sided polygon. quadrilateral Evaluate each expression
CS3621 Midterm Solution (Fall 2005) 150 points
 150 points") CS362 Midterm Solution Fall 25. Geometric Transformation CS362 Midterm Solution (Fall 25) 5 points (a) [5 points] Find the 2D transformation matrix for the reflection about the y-axis transformation (i.e.,
CS362 Midterm Solution Fall 25. Geometric Transformation CS362 Midterm Solution (Fall 25) 5 points (a) [5 points] Find the 2D transformation matrix for the reflection about the y-axis transformation (i.e.,
Curve and Surface Basics
 Curve and Surface Basics Implicit and parametric forms Power basis form Bezier curves Rational Bezier Curves Tensor Product Surfaces ME525x NURBS Curve and Surface Modeling Page 1 Implicit and Parametric
Curve and Surface Basics Implicit and parametric forms Power basis form Bezier curves Rational Bezier Curves Tensor Product Surfaces ME525x NURBS Curve and Surface Modeling Page 1 Implicit and Parametric
Polygon Angle-Sum Theorem:
 Name Must pass Mastery Check by: [PACKET 5.1: POLYGON -SUM THEOREM] 1 Write your questions here! We all know that the sum of the angles of a triangle equal 180. What about a quadrilateral? A pentagon?
Name Must pass Mastery Check by: [PACKET 5.1: POLYGON -SUM THEOREM] 1 Write your questions here! We all know that the sum of the angles of a triangle equal 180. What about a quadrilateral? A pentagon?
Bezier Curves. An Introduction. Detlef Reimers
 Bezier Curves An Introduction Detlef Reimers detlefreimers@gmx.de http://detlefreimers.de September 1, 2011 Chapter 1 Bezier Curve Basics 1.1 Linear Interpolation This section will give you a basic introduction
Bezier Curves An Introduction Detlef Reimers detlefreimers@gmx.de http://detlefreimers.de September 1, 2011 Chapter 1 Bezier Curve Basics 1.1 Linear Interpolation This section will give you a basic introduction
Triangulations of hyperbolic 3-manifolds admitting strict angle structures
 Triangulations of hyperbolic 3-manifolds admitting strict angle structures Craig D. Hodgson, J. Hyam Rubinstein and Henry Segerman segerman@unimelb.edu.au University of Melbourne January 4 th 2012 Ideal
Triangulations of hyperbolic 3-manifolds admitting strict angle structures Craig D. Hodgson, J. Hyam Rubinstein and Henry Segerman segerman@unimelb.edu.au University of Melbourne January 4 th 2012 Ideal
Common Core Specifications for Geometry
 1 Common Core Specifications for Geometry Examples of how to read the red references: Congruence (G-Co) 2-03 indicates this spec is implemented in Unit 3, Lesson 2. IDT_C indicates that this spec is implemented
1 Common Core Specifications for Geometry Examples of how to read the red references: Congruence (G-Co) 2-03 indicates this spec is implemented in Unit 3, Lesson 2. IDT_C indicates that this spec is implemented
Basic tool: orientation tests
 Basic tool: orientation tests Vera Sacristán Computational Geometry Facultat d Informàtica de Barcelona Universitat Politècnica de Catalunya Orientation test in R 2 Given 3 points p,, r in the plane, efficiently
Basic tool: orientation tests Vera Sacristán Computational Geometry Facultat d Informàtica de Barcelona Universitat Politècnica de Catalunya Orientation test in R 2 Given 3 points p,, r in the plane, efficiently
Surface Parameterization
 Surface Parameterization A Tutorial and Survey Michael Floater and Kai Hormann Presented by Afra Zomorodian CS 468 10/19/5 1 Problem 1-1 mapping from domain to surface Original application: Texture mapping
Surface Parameterization A Tutorial and Survey Michael Floater and Kai Hormann Presented by Afra Zomorodian CS 468 10/19/5 1 Problem 1-1 mapping from domain to surface Original application: Texture mapping
SIMPLICIAL ENERGY AND SIMPLICIAL HARMONIC MAPS
 SIMPLICIAL ENERGY AND SIMPLICIAL HARMONIC MAPS JOEL HASS AND PETER SCOTT Abstract. We introduce a combinatorial energy for maps of triangulated surfaces with simplicial metrics and analyze the existence
SIMPLICIAL ENERGY AND SIMPLICIAL HARMONIC MAPS JOEL HASS AND PETER SCOTT Abstract. We introduce a combinatorial energy for maps of triangulated surfaces with simplicial metrics and analyze the existence
Ma/CS 6b Class 11: Kuratowski and Coloring
 Ma/CS 6b Class 11: Kuratowski and Coloring By Adam Sheffer Kuratowski's Theorem Theorem. A graph is planar if and only if it does not have K 5 and K 3,3 as topological minors. We know that if a graph contains
Ma/CS 6b Class 11: Kuratowski and Coloring By Adam Sheffer Kuratowski's Theorem Theorem. A graph is planar if and only if it does not have K 5 and K 3,3 as topological minors. We know that if a graph contains
Clipping Polygons. A routine for clipping polygons has a variety of graphics applications.
 The Mathematica Journal Clipping Polygons Garry Helzer Department of Mathematics University of Maryland College Park, MD 20742 gah@math.umd.edu A routine for clipping polygons has a variety of graphics
The Mathematica Journal Clipping Polygons Garry Helzer Department of Mathematics University of Maryland College Park, MD 20742 gah@math.umd.edu A routine for clipping polygons has a variety of graphics
Triangles and Squares David Eppstein, ICS Theory Group, April 20, 2001
 Triangles and Squares David Eppstein, ICS Theory Group, April 20, 2001 Which unit-side-length convex polygons can be formed by packing together unit squares and unit equilateral triangles? For instance
Triangles and Squares David Eppstein, ICS Theory Group, April 20, 2001 Which unit-side-length convex polygons can be formed by packing together unit squares and unit equilateral triangles? For instance
Math 155, Lecture Notes- Bonds
 Math 155, Lecture Notes- Bonds Name Section 10.1 Conics and Calculus In this section, we will study conic sections from a few different perspectives. We will consider the geometry-based idea that conics
Math 155, Lecture Notes- Bonds Name Section 10.1 Conics and Calculus In this section, we will study conic sections from a few different perspectives. We will consider the geometry-based idea that conics
GAUSS-BONNET FOR DISCRETE SURFACES
 GAUSS-BONNET FOR DISCRETE SURFACES SOHINI UPADHYAY Abstract. Gauss-Bonnet is a deep result in differential geometry that illustrates a fundamental relationship between the curvature of a surface and its
GAUSS-BONNET FOR DISCRETE SURFACES SOHINI UPADHYAY Abstract. Gauss-Bonnet is a deep result in differential geometry that illustrates a fundamental relationship between the curvature of a surface and its
JEFFERSON COLLEGE COURSE SYLLABUS MTH 009 GEOMETRY. 1 Credit Hour. Prepared By: Carol Ising. Revised Date: September 9, 2008 by: Carol Ising
 JEFFERSON COLLEGE COURSE SYLLABUS MTH 009 GEOMETRY 1 Credit Hour Prepared By: Carol Ising Revised Date: September 9, 2008 by: Carol Ising Arts & Science Education Dr. Mindy Selsor, Dean MTH009 Geometry
JEFFERSON COLLEGE COURSE SYLLABUS MTH 009 GEOMETRY 1 Credit Hour Prepared By: Carol Ising Revised Date: September 9, 2008 by: Carol Ising Arts & Science Education Dr. Mindy Selsor, Dean MTH009 Geometry
IND62 TIM CALIBRATION OF FREE-FORM STANDARD AND THEIR APPLICATIONS FOR IN-PROCESS MEASUREMENT ON MACHINE TOOLS
 IND62 TIM CALIBRATION OF FREE-FORM STANDARD AND THEIR APPLICATIONS FOR IN-PROCESS MEASUREMENT ON MACHINE TOOLS VÍT ZELENÝ, IVANA LINKEOVÁ, PAVEL SKALNÍK (LENGTH MEASUREMENT DEPARTMENT) 5th November 2014
IND62 TIM CALIBRATION OF FREE-FORM STANDARD AND THEIR APPLICATIONS FOR IN-PROCESS MEASUREMENT ON MACHINE TOOLS VÍT ZELENÝ, IVANA LINKEOVÁ, PAVEL SKALNÍK (LENGTH MEASUREMENT DEPARTMENT) 5th November 2014
What would you see if you live on a flat torus? What is the relationship between it and a room with 2 mirrors?
 DAY I Activity I: What is the sum of the angles of a triangle? How can you show it? How about a quadrilateral (a shape with 4 sides)? A pentagon (a shape with 5 sides)? Can you find the sum of their angles
DAY I Activity I: What is the sum of the angles of a triangle? How can you show it? How about a quadrilateral (a shape with 4 sides)? A pentagon (a shape with 5 sides)? Can you find the sum of their angles
CHAPTER 8 QUADRATIC RELATIONS AND CONIC SECTIONS
 CHAPTER 8 QUADRATIC RELATIONS AND CONIC SECTIONS Big IDEAS: 1) Writing equations of conic sections ) Graphing equations of conic sections 3) Solving quadratic systems Section: Essential Question 8-1 Apply
CHAPTER 8 QUADRATIC RELATIONS AND CONIC SECTIONS Big IDEAS: 1) Writing equations of conic sections ) Graphing equations of conic sections 3) Solving quadratic systems Section: Essential Question 8-1 Apply
Intersection of an Oriented Box and a Cone
 Intersection of an Oriented Box and a Cone David Eberly, Geometric Tools, Redmond WA 98052 https://www.geometrictools.com/ This work is licensed under the Creative Commons Attribution 4.0 International
Intersection of an Oriented Box and a Cone David Eberly, Geometric Tools, Redmond WA 98052 https://www.geometrictools.com/ This work is licensed under the Creative Commons Attribution 4.0 International
Further Graphics. A Brief Introduction to Computational Geometry
 Further Graphics A Brief Introduction to Computational Geometry 1 Alex Benton, University of Cambridge alex@bentonian.com Supported in part by Google UK, Ltd Terminology We ll be focusing on discrete (as
Further Graphics A Brief Introduction to Computational Geometry 1 Alex Benton, University of Cambridge alex@bentonian.com Supported in part by Google UK, Ltd Terminology We ll be focusing on discrete (as