Training Deformable Object Models for Human Detection based on Alignment and Clustering
|
|
|
- Ethan Holt
- 5 years ago
- Views:
Transcription
1 Training Deformable Object Models for Human Detection based on Alignment and Clustering Benjamin Drayer and Thomas Brox Department of Computer Science, Centre of Biological Signalling Studies (BIOSS), University of Freiburg, Germany {drayer, Abstract. We propose a clustering method that considers non-rigid alignment of samples. The motivation for such a clustering is training of object detectors that consist of multiple mixture components. In particular, we consider the deformable part model (DPM) of Felzenszwalb et al., where each mixture component includes a learned deformation model. We show that alignment based clustering distributes the data better to the mixture components of the DPM than previous methods. Moreover, the alignment helps the non-convex optimization of the DPM find a consistent placement of its parts and, thus, learn more accurate part filters. 1 Introduction Much variability among images of persons is due to viewpoint and deformation/articulation. This variation makes it hard to pick discriminative features. Exemplar based classifiers are less affected by variation, as they learn the samples by heart, but they do not generalize well. The deformable part model (DPM) [9] has introduced two complementary concepts to deal with variation: mixture components address very different viewpoints and deformable parts can handle smaller viewpoint changes and articulation. Mixture components and a hierarchical part structure are also used in other recognition models, such as convolutional neural nets [16]. With their deep hierarchy of mixture components, they implement these concepts even more rigorously. However, the idea to also model typical deformations by including deformation costs is unique to the deformable part model. As viewpoint labels and the part placement are not given in typical training sets, these need to be inferred in conjunction with the classifier training. This makes the training procedure a rather tough non-convex optimization problem, where a good initialization is crucial. Felzenszwalb et al. [9] address this by using the bounding box aspect ratio to initialize mixture components. Others, building on [9], suggested clustering the HOG descriptors [1, 5, 12]. In all these cases, parts are initialized at high energy positions of the root filters positive weights. Initially, they do not account for deformation/movement within the


, we")



.")





 We")


 The initial part placement is")













2 2 Benjamin Drayer and Thomas Brox Dataset Cluster 1 Model Cluster 2 Model Cluster n Model n Fig. 1. On a training dataset (left), we compute alignment vector fields between all pairs of samples. This allows us to cluster the samples based on alignment-normalized similarities (middle). These clusters serve as mixture components for the deformable part model (right). The non-aligned samples in a cluster serve to train the root filter. Thanks to the alignment, we know a good initial placement of parts, which leads to more detailed part filters. training samples, which leads to very blurred part filters in the first training iterations. In this paper, we suggest running an alignment procedure on the training samples. This has two positive effects: (1) We enhance the clusters by enforcing that all samples in a cluster are similar up to a regular deformation, which directly results in stronger mixture components. (2) The initial part placement is improved. In particular, we allow for deformations that can be well represented by the deformable model. We use distances for clustering that reflect this space of deformations better than typical distances defined on non-aligned samples. As a consequence, we obtain mixture components that generalize better over deformations while the classifier can learn more detailed structures that are specific to the respective component. Additionally, the alignment allows us to initialize the part placement, since it tells us where the part should be placed in each training sample. Hence, the optimization of the DPM can train quite distinct part filters already in the first iteration. As a consequence, the final part filters can capture more detailed structures. An overview of our method is illustrated in Figure 1. 2 Related Work Appearance based clustering of training data in the context of the deformable part model by Felzenszwalb et al. [9] was proposed by Gu et al. [12]. The bounding box aspect ratio is supplemented by a distance on the HOG descriptors as a criterion to define the mixture components. A pure appearance based clustering was proposed by Divalla et al. [5]. Clustering was also used in conjunction with
3 Training Deformable Object Models 3 simple template based models, e.g., in Aghazadeh et al. [1] and Hariharan el al. [13]. An extreme variant, where each training sample defines its own mixture component, was proposed in [18]. Based on that, Dong et al. [6] use a combination of appearance and shape, where shape is obtained from the respective Exemplar-SVM. Another line of work defines mixture components with the help of additional supervision. This has been proposed in Zhu et al. [22, 23], where landmark annotation, respectively human clustering, is used. Two other approaches that fall into this category are the poselets of Bourdev et al. [3,11] using keypoint annotation and Azizpour et al. [2], where object parts are annotated in the training images. Alignment of training examples was also considered in the work of Gu et al. [11]. For each manually selected cluster representative, its 32 nearest neighbors are added to form a cluster. Both, their and our approach, align the examples with respect to the cluster representative. Different from their approach, we select the representatives automatically and apply an unsupervised, non-rigid alignment, whereas Gu et al. employ a transformation matrix optimizing the Procrustes distance between the keypoints. In terms of the overall framework, the work of Ladicky et al. [17] is most related to ours, as it is the only one that combines the definition of mixture components with an unsupervised alignment procedure. Ladicky et al. rely on a locally affine model, which allows efficient optimization of the alignment variables in the structured SVM. In contrast, we have a more general non-rigid deformation model for clustering and provide a strong initialization for the star-model of Felzenszwalb et al. [9]. 3 Alignment Although HOG [4] is robust to some local deformation, clustering in HOG space generally cannot deal with larger image transformations and deformations. For example, already small rotation of the object in an image makes clustering fail. To address this problem, we use a distance we proposed in [7] that normalizes out all spatial transformations including non-rigid deformations and considers the similarity of the aligned HOG features as well as the deformation energy. In the scope of detection, we benefit from the alignment twice: The clusters improve and within a cluster we obtain correspondences for the various object parts. For each pair of examples we aim for the optimum deformation field that aligns one example to the other. The cost function consists of the data term E D, that aims for maximum feature overlap and a pairwise regularization term E P, that penalizes strong deformations: E(u) = E D (u) + E P (u) (1) This cost function is minimized with respect to the deformation field u. The globally normalized version of the HOG features F/ F 2 allows us to compare the alignment energies of different image pairs.

4 4 Benjamin Drayer and Thomas Brox x Error Fig. 2. Optimization of the weight parameters. Left: Exemplar of the given keypoint annotation. Right: l 2 distance between the corresponding keypoints after alignment with parameters λ 1 and λ 2, averaged over the image pairs. The optimum of is achieved with λ 1 = 21 and λ 2 = 900 (marked in red). The l 2 distance before alignment is Data term We use a weighted combination of the l 1 -norm and the dot product, as we introduced in [7]. The intuition behind this choice is to benefit from the robustness of the l 1 -norm and the capability of the dot-product to match features of different magnitude. A grid search on the weighting parameters λ 1 and λ 2 shows that the best results are achieved by a combination of both distances; see Figure 2. One may expect this result, because the l 1 -norm has problems matching features of different magnitude, whereas the dot product tends to many-to-one correspondences. The data term reads: E D (u) = x λ 1 F 2 (x + u(x)) F 1 (x) 1 λ 2 F 2 (x + u(x)), F 1 (x), (2) where x are the coordinates of the grid points and F 1 ( ), F 2 ( ) denote the feature representation of the images being aligned by u. The influence of the deformation cost E P is implicitly handled by the weighting parameters λ 1 and λ 2. We select these parameters automatically using the keypoint annotation provided in the Buffy training set, which coincide with the human joints; see Figure 2. The usage of keypoints in our work is restricted to the optimization of the weighting parameters. For the non-rigid alignment, only HOG features are used. In order to select the parameters, we take n pairs of images (I 1, J 1 ),..., (I n, J n ) and the corresponding keypoint pairs (p 1, q 1 ),..., (p n, q n ). With u (i,j) λ 1λ 2 we denote the alignment between image pair (I i, J i ) under the parameters λ 1, λ 2, where the optimal parameters correspond to the alignment that minimizes the l 2 -distance
5 Training Deformable Object Models 5 between corresponding keypoints: 1 argmin λ 1,λ 2 n n q i u (i,j) λ 1λ 2 (p i ). (3) 2 i=1 For a set of n = 20 pairs, we have an average l 2 -distance of without alignment. The best result is achieved with λ 1 = 21, λ 2 = 900, as shown in Figure 2, yielding a distance of Deformation cost The deformation cost is defined as the total variation of the deformation field u: E P (u) = u(x) u(y) 1, (4) x,y N (x) where N (x) denotes the neighborhood of x. In our experiments, we use a 4- connected neighborhood. The total variation regularization prefers piecewise constant deformation fields and allows for discontinuities in the deformation field. This is necessary for handling the typical challenges of the dataset, e.g. raising arms, change in viewpoint and occlusion of body parts. The resulting optimization problem can be solved efficiently with the Fast Primal-Dual solver of [14, 15]. On average, the alignment of a pair takes 0.11 seconds. The result is an approximation, but in practice it is very close to the global optimum 1. 4 Clustering 4.1 Pairwise distances and spectral clustering We directly use the energy E in (1) to define pairwise distances for clustering, which includes both the matching cost and the deformation cost. Figure 3 illustrates that the nearest neighbors more often contain the same instance or other similar instances if alignment is taken into account. Based on the pairwise distances we apply spectral clustering [19, 21], by constructing the affinity matrix A in the following way: A(i, j) = e E(i,j) 2σ 2, (5) with σ = 0.7. The alignment procedure and the derived distances are most informative for small distances. In case of large distances, a good alignment cannot be found, which indicates that the samples do not match. Therefore, we only keep the affinities of the 20 nearest neighbors of each sample and set all other affinities to zero. This ensures sufficient connectivity and keeps the graph 1 This can be read from the lower and upper bounds computed during optimization.
6 Benjamin Drayer and Thomas Brox Aligned HOG Aligned HOG 6 Q Fig. 3. Nearest neighbor queries showing query image Q and its 10 nearest neighbors. The 1st and 3rd row show the query result using HOG features without alignment. The 2nd and 4th row use alignment energy E as distance and show the nearest neighbors warped to the query image. The alignment based distance returns more similar instances, demonstrating that it is more invariant to deformations than simple HOG based distances. of the dataset from splitting into tiny clusters, while at the same time a strong preference is given to the most similar pairs. Since the 20 nearest neighbors are not the same for a pair of samples and the alignment is not enforced to be a diffeomorphism, the affinities are not symmetric. Thus, symmetry of the final affinity matrix is enforced by using A + At. 4.2 Clustering performance In order to evaluate the clustering performance and to justify some design choices quantitatively, we add some additional annotation to the training data of the Buffy dataset. Manually specifying unique ground truth clusters is impossible. There are many cases in which even humans do not agree on whether an object belongs to one or another cluster and setting the right number of clusters is even more difficult. Hence, rather than specifying clusters, we label pairs of examples by assigning them to one out of three categories. The first category comprises the pairs that are clearly similar and should end up in one cluster. The second category contains all pairs that are clearly different and should end up in different clusters. The last category is unknown that takes all pairs, for which an assignment to one of the two other categories is difficult to make.
7 Training Deformable Object Models Fig. 4. Qualitative comparison between clustering in HOG space (no alignment) (left) and alignment based clustering (right). For the visualization we used a 2D embedding (obtained with multidimensional scaling [20]) of the corresponding affinity matrices. Different colors indicate different clusters. Without alignment, some instances that should belong to the same cluster, e.g., the two cross-armed women, the men at the table, and the upper frontal bodies, end up in different clusters. With alignment similar examples are mapped closer together, e.g., the men walking to the left and the men from behind. Based on this annotation, we can compute true and false positives, as well as true and false negatives. In clustering, the Jaccard index, the Rand index and F- score are frequently used quality measures obtained from these values. However, one has to decide on the number of clusters using these measures, which is hard. In our scenario, it is more appropriate to compute precision and recall for the clustering. This way we do not need to fix the number of clusters and the average precision (AP) serves as measure for the overall quality. As the number of pairs is quadratic in the number of examples, the effort to annotate all pairs is too high. However, we can resort to random sampling and the effect of large numbers. Labeling m pairs of images resembles the true distribution with a maximum deviation of ε = z (1 α 2 ) s m. (6) Here, z (1 α 2 ) is the z-quantile of the normal distribution and s denotes the standard deviation. Due to the underlying Bernoulli distribution with s 2 = p(1 p), the upper bound of the standard deviation is 0.5. We manually labeled 4000 pairs of images and considering a confidence of 95% we obtain a maximum deviation of ε 1.6%. This means the computed AP for the clustering is the center of a confidence interval with length 3.2.
8 8 Benjamin Drayer and Thomas Brox Table 1. Average precision on the clustering task with and without alignment. Alignment improves the clustering AP by 4%. The deformation cost E P alone is not sufficient for clustering. E D, u = 0 (without alignment) E D E P (deformation cost only) E = E D + E P Table 2. Comparison of the DPM clustering and ours for a fixed number of clusters. The left column shows the F-measure of the initial clusters and the right column after reassignment by the mixture model. We evaluated the DPM with 3 and 5 aspect ratios, corresponding to 6 and 10 clusters. Our alignment based clustering yields stronger clusters than DPM. At initialization After DPM training DPM K = DPM K = E = E D + E P, K = We evaluate the affinities of Equation 5 by varying the exponent corresponding to the distance. Namely, the weighted combination of l 1 -norm and dot product, the energy of the data term E D, the smoothness term E P and the total energy of the alignment E. We achieve an improvement of more than 4% AP using the energy of the alignment instead of the unaligned features, see Table 1. Despite having an uncertainty of 1.6% this improvement is statistically significant. We also evaluate how well the internal optimization of the mixture components of the DPM perform on the clustering task. The DPM first clusters the samples based on the bounding box aspect ratio and then splits each group into a so-called left- and right-facing cluster based on appearance. We evaluate 6 and 10 clusters (corresponding to 3 and 5 aspect ratios) and report the performance of the initial clusters and the final ones (after running the full DPM training). Since in this experiment the number of clusters is fixed and we only know a single precision-recall point, we compare performance based on the F-measure. As one may expect, Table 2 shows that optimization of the mixture components by the DPM improves the clustering performance compared to the initial cluster assignment. Therefore, the proposed clustering using non-rigid alignment E yields better clusters than the DPM. A qualitative comparison of the alignment based clustering is given in Figure 4. The alignment based distance provides cleaner clusters than the purely appearance based distance. This is because the non-rigid alignment better deals with deformation in the data and hence provides more meaningful matches (see also Figure 3).
9 Training Deformable Object Models 9 5 Training the deformable part model Given n training examples (x 1, y 1 ),..., (x n, y n ) with y i { 1, 1}, the DPM [9] tries to infer the assignment z i {1,..., K} of a sample i to one of K mixture components, the hyperplane parameters w kj, b kj of a linear SVM for each mixture component k and part j {1,...M}, and the deformation parameters θ kj in a joint optimization process. The objective is highly non-convex. To initialize the model, [9] first train a model with just the root filters and no parts. The root filters then serve as an initialization for the parts. 5.1 Mixture components Without parts, the training objective becomes that of a mixture of linear SVMs: 1 argmin w 2 K n w k C ɛ i, k=1 i=1 y i s zi i 1 ɛ i, ɛ i 0, z i = argmin s k i, k (7) s k i = w k0f (x i ) + b k0 with regularization parameter C and slack variables ɛ i. F (x i ) denotes the feature representation (HOG) of sample i. The optimum parameters are estimated by alternating optimization of SVM parameters w k0, b k0 and the latent assignment variables z i. In fact, this strongly resembles clustering in an expectationmaximization style. So even without parts there is a strong dependency on the initialization. In [9], the initial assignments z i are based on the bounding box aspect ratio. Moreover, each cluster is split into left- and right-facing instances based on similarity of the HOG descriptors. We replace these initial mixture components simply by the clusters from the previous section. 5.2 Part filters [9] derives initial part filters from the root filters. The root filters are upsampled to the resolution of the part filters and parts are placed such that most of the positive weights of the root filters are covered. Clearly, no deformation is considered for the initial placement of the parts. This is left to the overall optimization over all model parameters. We propose to use the non-rigid alignment from Section 3 to initialize the relative positions of the parts. It is easy to see that this can be reduced to the initialization procedure in [9] but using the clusters from Section 4 and warping all samples within a cluster k to one representative sample r k of that cluster. This is possible, since for each pair of samples the respective deformation field u













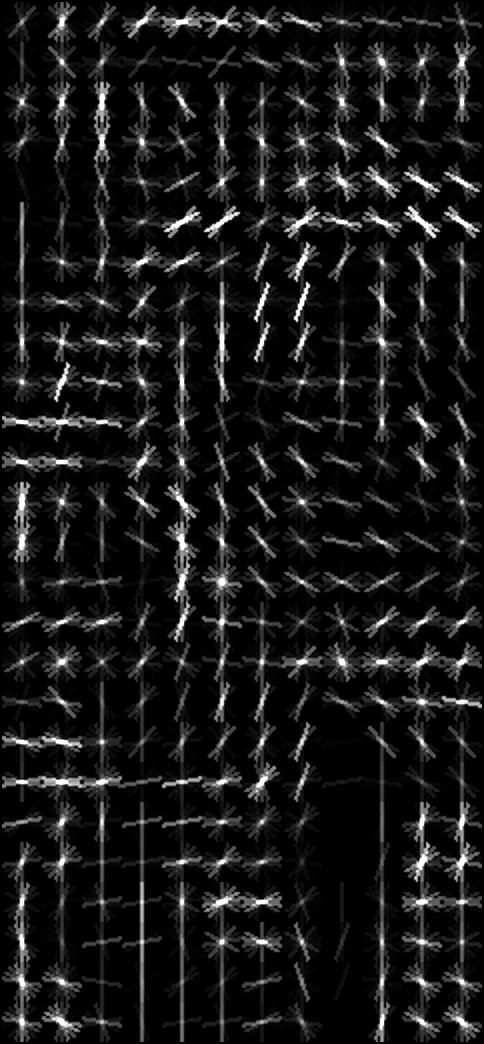


































10 10 Benjamin Drayer and Thomas Brox Fig. 5. Part initialization with accurate auxiliary root filters shown for 5 out of 10 mixture components. Left: Samples from the clusters, red marks the representative sample rk. Middle: Overlay of all samples with (right) and without (left) alignment (images are histogram-normalized for better visualization). Right: Trained auxiliary root filter with (right) and without (left) alignment. Especially for the two top-most and the bottom cluster alignment leads to more detailed filters. In the head and shoulder region this is visible particularly well.
11 Training Deformable Object Models 11 is available. The representatives r k are selected as the samples with the lowest intra-cluster distance. We train auxiliary root filters as in Section 5.1 but using the warped samples and high resolution HOG features (the same resolution as the part filters). We call these root filters accurate. Their only purpose is to obtain improved initial part filters, which again can be set by covering most of the positive weights. As shown in Figure 5, the accurate root filters are visibly more detailed since the warped samples agree on the same location of the most important structures of that filter. These details transfer to the initial part filters. We note that the higher accuracy of the root filters is due to the alignment procedure. Running the standard procedure just at a higher resolution has hardly any effect, since the local variation of the samples makes it impossible to learn consistent filters. The average sample image in Figure 5 clearly shows less detailed structures before warping than after warping. After initialization, we combine the resulting part filters with the standard root filters (trained without aligning the samples to a reference sample). We denote this approach as DPM+a. The same approach with the standard part filter initialization is denoted as DPM+c. Both approaches run the final joint optimization over all parameters as in [9]. 6 Experimental evaluation 6.1 Dataset and evaluation method For evaluation we use the Buffy dataset from [10] and PASCAL VOC 2007 [8]. The first was used in the closely related LADF detector by Ladicky et al. [17]. The dataset contains strong variation in illumination and truncated and occluded persons. It is composed of scenes from episodes 2 6 of the fifth season of the TV-series Buffy the Vampire Slayer. Since the dataset is based on videos and there are multiple samples of the same instance at different poses in the training set, it supports transitions between samples, whereas samples in datasets like PASCAL VOC are much harder to link. As in [17], we use s5e2, s5e5, s5e6 for testing and s5e3, s5e4 for training and validation. The training and test sets contain 276 and 472 images, respectively. As usual, a detection is counted as positive if the intersection over union ratio with respect to ground truth bounding box is greater than 0.5. We report the average precision (AP) over the test set. 6.2 Results Table 3 compares the AP of alignment based clustering (DPM+c) and initial part placement (DPM+a) against the classical DPM (with and without parts) and the LADF detector by Ladicky et al. [17] 2. The DPM model uses 3 aspect 2 The reviewing process revealed some inconsistencies between the dataset used in [17] and the one that is available for download. For the public dataset a few corrections
12 12 Benjamin Drayer and Thomas Brox Table 3. Average precision (AP) on detection for various approaches on the Buffy dataset. Compared to the DPM [9] (with 3, 6 and 10 mixture components) we gain about 2% AP by clustering (DPM+c). Improving also the part filters (DPM+a) leads to another increase of 3% AP. HOG DPM HOG DPM DPM HOG Ladicky K = 3 K = 3 K = 6 K = 6 K = 10 clustering [17] DPM+c DPM+a precision Method HOG K=3 DPM K=3 HOG K=6 DPM K=6 HOG cluster ours ours+a AP recall Fig. 6. Precision-recall curves of our method (red) on the Buffy dataset. Baselines are DPM without (dark blue and dark green) and with left-right-splitting (violet and magenta). We clearly see that appearance based clustering improves the detection results and that the alignment improves the results twice: first by optimizing the clustering, which results in a better detection performance and second, by the better part placement, which gives the major improvement. ratios, with and without left-right-splitting, resulting in K = 6 and K = 3 mixture components. For our approach, we used K = 10 components, which corresponds to the K components of the LADF detector. Figure 6 shows the precision-recall curves of methods for which code was publicly available. Typical detection results of our method are shown in Figure 7. In the previous sections, we discussed the importance of good clustering as initialization for the mixture model learning. The alignment based clustering as a starting point for the mixture components (DPM+c) has indeed a positive effect on detection with the DPM. It also slightly improves over clustering without alignment indicating that the improvement is not only due to the larger number in the annotation have been made, which is why the direct comparison to [17] should be taken with a grain of salt. The comparison to DPM is fair and the DPM results reported in [17] can be almost exactly reproduced when using DPM version 3 or the newer version with left-right-splitting turned off.
13 Training Deformable Object Models 13 Table 4. Average precision (AP) on detection for the DPM (K = 6) baseline, DPM+c and DPM+a on the PASCAL VOC 2007 test set. Classes with less variation or a denser sampling e.g. aeroplane improve with the alignment, whereas classes with larger variability, such as cat, are hard to align and performance drops. aero bike bird boat DPM [9] DPM+c DPM+a table dog horse mbike bottle person DPM [9] DPM+c DPM+a bus plant car sheep cat sofa chair train cow tv of mixture components 3. The main boost in performance is due to the better part initialization, included in DPM+a, which is due to the accurate root filters trained on warped samples. In total, we get an improvement of more than 5% AP compared to the DPM. The results of the object detection on PASCAL VOC 2007 are shown in Table 4. Both approaches DPM+c and DPM+a heavily depend on the alignment. If the specific class is too diverse in pose and appearance, such as for cat, dog, plant and person, alignment is too hard and even deteriorates the clustering and the DPM training. On the other hand, subcategories with a strong connectivity among the samples, such as for aeroplane, cow and horse, the DPM benefits from both clustering and alignment. We believe that the alignment is most beneficial when training samples from video showing the same instance in different poses are involved. Apart from the Buffy dataset, few data of that sort is yet available. 7 Conclusions We have presented a new clustering method based on a pairwise non-rigid alignment. In the experiments, we have shown that such a strategy is most reasonable for datasets that allow for clear correspondences within subcategories such as in videos. Detailed analysis on the Buffy dataset has shown that the alignment improves the performance directly in terms of clustering AP and indirectly by obtaining better detection results. Furthermore, we have demonstrated that alignment can help initialize the part placement in the deformable part model. 3 More mixture components are not necessarily advantageous because a larger number of components leads to a smaller number of samples to train each component.
14 14 Benjamin Drayer and Thomas Brox Fig. 7. Qualitative comparison between the detections of our model DPM+a(bottom rows) and the DPM (top rows). Green boxes indicate correct detections with an intersection over union ratio > 0.5; red boxes indicate false detections. With DPM+a, we capture a wider range of variation that does not only manifest in more detected people (ex 4, 7, 8, 12), but also in more precise bounding boxes (ex 6, 10, 11, 14). Both methods fail in case of highly occluded or truncated people, as in ex 5 and 10. Instances with few or no training data, as the sitting person in ex. 13, cannot be handled. These would require additional mixture components with corresponding additional training data. It is worth noting that we finally optimize the same energy model as the DPM. Apart from increasing the number of mixture components from K = 6 to K = 10 the model has not changed. The improvement is only due to a better initialization. This indicates that complex detection approaches which optimize many mutually dependent parameters can benefit from stronger optimization methods and sophisticated initialization strategies. Acknowledgements This study was supported by the Excellence Initiative of the German Federal and State Governments (EXC 294) and by the ERC Starting Grant VIDEOLEARN.
15 Training Deformable Object Models 15 References 1. Aghazadeh, O., Azizpour, H., Sullivan, J., Carlsson, S.: Mixture component identification and learning for visual recognition. In: ECCV. pp Springer (2012) 2. Azizpour, H., Laptev, I.: Object detection using strongly-supervised deformable part models. In: ECCV. pp Springer (2012) 3. Bourdev, L., Maji, S., Brox, T., Malik, J.: Detecting people using mutually consistent poselet activations. In: ECCV. pp Springer-Verlag (2010) 4. Dalal, N., Triggs, B.: Histograms of oriented gradients for human detection. In: CVPR. pp IEEE Computer Society (2005) 5. Divvala, S.K., Efros, A.A., Hebert, M.: How important are deformable parts in the deformable parts model? In: ECCV. pp Springer (2012) 6. Dong, J., Xia, W., Chen, Q., Feng, J., Huang, Z., Yan, S.: Subcategory-aware object classification. In: CVPR. pp IEEE (2013) 7. Drayer, B., Brox, T.: Distances based on non-rigid alignment for comparison of different object instances. In: GCPR. pp Springer (2013) 8. Everingham, M., Van Gool, L., Williams, C.K.I., Winn, J., Zisserman, A.: The PASCAL Visual Object Classes Challenge 2007 (VOC2007) Results Felzenszwalb, P.F., Girshick, R.B., McAllester, D., Ramanan, D.: Object detection with discriminatively trained part-based models. IEEE Transactions on Pattern Analysis and Machine Intelligence 32(9), (2010) 10. Ferrari, V., Marin-Jimenez, M., Zisserman, A.: Progressive search space reduction for human pose estimation. In: CVPR (2008) 11. Gu, C., Arbelaez, P., Lin, Y., Yu, K., Malik, J.: Multi-component models for object detection. In: ECCV. pp Springer (2012) 12. Gu, C., Ren, X.: Discriminative mixture-of-templates for viewpoint classification. In: ECCV. pp Springer (2010) 13. Hariharan, B., Malik, J., Ramanan, D.: Discriminative decorrelation for clustering and classification. In: ECCV. pp Springer (2012) 14. Komodakis, N., Tziritas, G.: Approximate labeling via graph cuts based on linear programming. IEEE Transactions on Pattern Analysis and Machine Intelligence 29(8), (Aug 2007) 15. Komodakis, N., Tziritas, G., Paragios, N.: Performance vs computational efficiency for optimizing single and dynamic mrfs: Setting the state of the art with primaldual strategies. Computer Vision and Image Understanding 112(1), (Oct 2008) 16. Krizhevsky, A., Sutskever, I., Hinton, G.E.: Imagenet classification with deep convolutional neural networks. In: Advances in Neural Information Processing Systems. pp (2012) 17. Ladicky, L., Torr, P.H.S., Zisserman, A.: Latent svms for human detection with a locally affine deformation field. In: BMVC. BMVA Press (2012) 18. Malisiewicz, T., Gupta, A., Efros, A.A.: Ensemble of exemplar-svms for object detection and beyond. In: ICCV. pp IEEE Computer Society (2011) 19. Ng, A.Y., Jordan, M.I., Weiss, Y.: On spectral clustering: Analysis and an algorithm. In: Advances in Neural Information Processing Systems. pp MIT Press (2001) 20. Seber, G.: Multivariate observations. Wiley (1984)
16 16 Benjamin Drayer and Thomas Brox 21. Shi, J., Malik, J.: Normalized cuts and image segmentation. IEEE Transactions on Pattern Analysis and Machine Intelligence 22, (1997) 22. Zhu, X., Ramanan, D.: Face detection, pose estimation, and landmark localization in the wild. In: CVPR. pp IEEE (2012) 23. Zhu, X., Vondrick, C., Ramanan, D., Fowlkes, C.C.: Do we need more training data or better models for object detection? In: BMVC. BMVA Press (2012)
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Detection III: Analyzing and Debugging Detection Methods
 CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
Category-level localization
 Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection
 Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection Hyunghoon Cho and David Wu December 10, 2010 1 Introduction Given its performance in recent years' PASCAL Visual
Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection Hyunghoon Cho and David Wu December 10, 2010 1 Introduction Given its performance in recent years' PASCAL Visual
An Object Detection Algorithm based on Deformable Part Models with Bing Features Chunwei Li1, a and Youjun Bu1, b
 5th International Conference on Advanced Materials and Computer Science (ICAMCS 2016) An Object Detection Algorithm based on Deformable Part Models with Bing Features Chunwei Li1, a and Youjun Bu1, b 1
5th International Conference on Advanced Materials and Computer Science (ICAMCS 2016) An Object Detection Algorithm based on Deformable Part Models with Bing Features Chunwei Li1, a and Youjun Bu1, b 1
Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network
 Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network Anurag Arnab and Philip H.S. Torr University of Oxford {anurag.arnab, philip.torr}@eng.ox.ac.uk 1. Introduction
Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network Anurag Arnab and Philip H.S. Torr University of Oxford {anurag.arnab, philip.torr}@eng.ox.ac.uk 1. Introduction
Development in Object Detection. Junyuan Lin May 4th
 Development in Object Detection Junyuan Lin May 4th Line of Research [1] N. Dalal and B. Triggs. Histograms of oriented gradients for human detection, CVPR 2005. HOG Feature template [2] P. Felzenszwalb,
Development in Object Detection Junyuan Lin May 4th Line of Research [1] N. Dalal and B. Triggs. Histograms of oriented gradients for human detection, CVPR 2005. HOG Feature template [2] P. Felzenszwalb,
Deformable Part Models with Individual Part Scaling
 DUBOUT, FLEURET: DEFORMABLE PART MODELS WITH INDIVIDUAL PART SCALING 1 Deformable Part Models with Individual Part Scaling Charles Dubout charles.dubout@idiap.ch François Fleuret francois.fleuret@idiap.ch
DUBOUT, FLEURET: DEFORMABLE PART MODELS WITH INDIVIDUAL PART SCALING 1 Deformable Part Models with Individual Part Scaling Charles Dubout charles.dubout@idiap.ch François Fleuret francois.fleuret@idiap.ch
Detecting Objects using Deformation Dictionaries
 Detecting Objects using Deformation Dictionaries Bharath Hariharan UC Berkeley bharath2@eecs.berkeley.edu C. Lawrence Zitnick Microsoft Research larryz@microsoft.com Piotr Dollár Microsoft Research pdollar@microsoft.com
Detecting Objects using Deformation Dictionaries Bharath Hariharan UC Berkeley bharath2@eecs.berkeley.edu C. Lawrence Zitnick Microsoft Research larryz@microsoft.com Piotr Dollár Microsoft Research pdollar@microsoft.com
Learning Collections of Part Models for Object Recognition
 Learning Collections of Part Models for Object Recognition Ian Endres, Kevin J. Shih, Johnston Jiaa, Derek Hoiem University of Illinois at Urbana-Champaign {iendres2,kjshih2,jiaa1,dhoiem}@illinois.edu
Learning Collections of Part Models for Object Recognition Ian Endres, Kevin J. Shih, Johnston Jiaa, Derek Hoiem University of Illinois at Urbana-Champaign {iendres2,kjshih2,jiaa1,dhoiem}@illinois.edu
Object Recognition II
 Object Recognition II Linda Shapiro EE/CSE 576 with CNN slides from Ross Girshick 1 Outline Object detection the task, evaluation, datasets Convolutional Neural Networks (CNNs) overview and history Region-based
Object Recognition II Linda Shapiro EE/CSE 576 with CNN slides from Ross Girshick 1 Outline Object detection the task, evaluation, datasets Convolutional Neural Networks (CNNs) overview and history Region-based
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION
 REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
Object Detection with Discriminatively Trained Part Based Models
 Object Detection with Discriminatively Trained Part Based Models Pedro F. Felzenszwelb, Ross B. Girshick, David McAllester and Deva Ramanan Presented by Fabricio Santolin da Silva Kaustav Basu Some slides
Object Detection with Discriminatively Trained Part Based Models Pedro F. Felzenszwelb, Ross B. Girshick, David McAllester and Deva Ramanan Presented by Fabricio Santolin da Silva Kaustav Basu Some slides
Segmenting Objects in Weakly Labeled Videos
 Segmenting Objects in Weakly Labeled Videos Mrigank Rochan, Shafin Rahman, Neil D.B. Bruce, Yang Wang Department of Computer Science University of Manitoba Winnipeg, Canada {mrochan, shafin12, bruce, ywang}@cs.umanitoba.ca
Segmenting Objects in Weakly Labeled Videos Mrigank Rochan, Shafin Rahman, Neil D.B. Bruce, Yang Wang Department of Computer Science University of Manitoba Winnipeg, Canada {mrochan, shafin12, bruce, ywang}@cs.umanitoba.ca
c 2011 by Pedro Moises Crisostomo Romero. All rights reserved.
 c 2011 by Pedro Moises Crisostomo Romero. All rights reserved. HAND DETECTION ON IMAGES BASED ON DEFORMABLE PART MODELS AND ADDITIONAL FEATURES BY PEDRO MOISES CRISOSTOMO ROMERO THESIS Submitted in partial
c 2011 by Pedro Moises Crisostomo Romero. All rights reserved. HAND DETECTION ON IMAGES BASED ON DEFORMABLE PART MODELS AND ADDITIONAL FEATURES BY PEDRO MOISES CRISOSTOMO ROMERO THESIS Submitted in partial
An Exploration of Computer Vision Techniques for Bird Species Classification
 An Exploration of Computer Vision Techniques for Bird Species Classification Anne L. Alter, Karen M. Wang December 15, 2017 Abstract Bird classification, a fine-grained categorization task, is a complex
An Exploration of Computer Vision Techniques for Bird Species Classification Anne L. Alter, Karen M. Wang December 15, 2017 Abstract Bird classification, a fine-grained categorization task, is a complex
Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model
 Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model Johnson Hsieh (johnsonhsieh@gmail.com), Alexander Chia (alexchia@stanford.edu) Abstract -- Object occlusion presents a major
Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model Johnson Hsieh (johnsonhsieh@gmail.com), Alexander Chia (alexchia@stanford.edu) Abstract -- Object occlusion presents a major
Mixture Component Identification and Learning for Visual Recognition
 Mixture Component Identification and Learning for Visual Recognition Omid Aghazadeh, Hossein Azizpour, Josephine Sullivan, and Stefan Carlsson Computer Vision and Active Perception laboratory (CVAP), KTH,
Mixture Component Identification and Learning for Visual Recognition Omid Aghazadeh, Hossein Azizpour, Josephine Sullivan, and Stefan Carlsson Computer Vision and Active Perception laboratory (CVAP), KTH,
Modeling 3D viewpoint for part-based object recognition of rigid objects
 Modeling 3D viewpoint for part-based object recognition of rigid objects Joshua Schwartz Department of Computer Science Cornell University jdvs@cs.cornell.edu Abstract Part-based object models based on
Modeling 3D viewpoint for part-based object recognition of rigid objects Joshua Schwartz Department of Computer Science Cornell University jdvs@cs.cornell.edu Abstract Part-based object models based on
LEARNING TO GENERATE CHAIRS WITH CONVOLUTIONAL NEURAL NETWORKS
 LEARNING TO GENERATE CHAIRS WITH CONVOLUTIONAL NEURAL NETWORKS Alexey Dosovitskiy, Jost Tobias Springenberg and Thomas Brox University of Freiburg Presented by: Shreyansh Daftry Visual Learning and Recognition
LEARNING TO GENERATE CHAIRS WITH CONVOLUTIONAL NEURAL NETWORKS Alexey Dosovitskiy, Jost Tobias Springenberg and Thomas Brox University of Freiburg Presented by: Shreyansh Daftry Visual Learning and Recognition
Object Detection by 3D Aspectlets and Occlusion Reasoning
 Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
Multi-Component Models for Object Detection
 Multi-Component Models for Object Detection Chunhui Gu 1, Pablo Arbeláez 2, Yuanqing Lin 3, Kai Yu 4, and Jitendra Malik 2 1 Google Inc., Mountain View, CA, USA, chunhui@google.com 2 UC Berkeley, Berkeley,
Multi-Component Models for Object Detection Chunhui Gu 1, Pablo Arbeláez 2, Yuanqing Lin 3, Kai Yu 4, and Jitendra Malik 2 1 Google Inc., Mountain View, CA, USA, chunhui@google.com 2 UC Berkeley, Berkeley,
Using k-poselets for detecting people and localizing their keypoints
 Using k-poselets for detecting people and localizing their keypoints Georgia Gkioxari, Bharath Hariharan, Ross Girshick and itendra Malik University of California, Berkeley - Berkeley, CA 94720 {gkioxari,bharath2,rbg,malik}@berkeley.edu
Using k-poselets for detecting people and localizing their keypoints Georgia Gkioxari, Bharath Hariharan, Ross Girshick and itendra Malik University of California, Berkeley - Berkeley, CA 94720 {gkioxari,bharath2,rbg,malik}@berkeley.edu
Analysis: TextonBoost and Semantic Texton Forests. Daniel Munoz Februrary 9, 2009
 Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Gradient of the lower bound
 Weakly Supervised with Latent PhD advisor: Dr. Ambedkar Dukkipati Department of Computer Science and Automation gaurav.pandey@csa.iisc.ernet.in Objective Given a training set that comprises image and image-level
Weakly Supervised with Latent PhD advisor: Dr. Ambedkar Dukkipati Department of Computer Science and Automation gaurav.pandey@csa.iisc.ernet.in Objective Given a training set that comprises image and image-level
Seeing 3D chairs: Exemplar part-based 2D-3D alignment using a large dataset of CAD models
 Seeing 3D chairs: Exemplar part-based 2D-3D alignment using a large dataset of CAD models Mathieu Aubry (INRIA) Daniel Maturana (CMU) Alexei Efros (UC Berkeley) Bryan Russell (Intel) Josef Sivic (INRIA)
Seeing 3D chairs: Exemplar part-based 2D-3D alignment using a large dataset of CAD models Mathieu Aubry (INRIA) Daniel Maturana (CMU) Alexei Efros (UC Berkeley) Bryan Russell (Intel) Josef Sivic (INRIA)
Subcategory-aware Object Classification
 2013 IEEE Conference on Computer Vision and Pattern Recognition Subcategory-aware Object Classification Jian Dong 1, Wei Xia 1, Qiang Chen 1, Jianshi Feng 1, Zhongyang Huang 2, Shuicheng Yan 1 1 Department
2013 IEEE Conference on Computer Vision and Pattern Recognition Subcategory-aware Object Classification Jian Dong 1, Wei Xia 1, Qiang Chen 1, Jianshi Feng 1, Zhongyang Huang 2, Shuicheng Yan 1 1 Department
Unified, real-time object detection
 Unified, real-time object detection Final Project Report, Group 02, 8 Nov 2016 Akshat Agarwal (13068), Siddharth Tanwar (13699) CS698N: Recent Advances in Computer Vision, Jul Nov 2016 Instructor: Gaurav
Unified, real-time object detection Final Project Report, Group 02, 8 Nov 2016 Akshat Agarwal (13068), Siddharth Tanwar (13699) CS698N: Recent Advances in Computer Vision, Jul Nov 2016 Instructor: Gaurav
Part-Based Models for Object Class Recognition Part 3
 High Level Computer Vision! Part-Based Models for Object Class Recognition Part 3 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de! http://www.d2.mpi-inf.mpg.de/cv ! State-of-the-Art
High Level Computer Vision! Part-Based Models for Object Class Recognition Part 3 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de! http://www.d2.mpi-inf.mpg.de/cv ! State-of-the-Art
Action recognition in videos
 Action recognition in videos Cordelia Schmid INRIA Grenoble Joint work with V. Ferrari, A. Gaidon, Z. Harchaoui, A. Klaeser, A. Prest, H. Wang Action recognition - goal Short actions, i.e. drinking, sit
Action recognition in videos Cordelia Schmid INRIA Grenoble Joint work with V. Ferrari, A. Gaidon, Z. Harchaoui, A. Klaeser, A. Prest, H. Wang Action recognition - goal Short actions, i.e. drinking, sit
Detection and Localization with Multi-scale Models
 Detection and Localization with Multi-scale Models Eshed Ohn-Bar and Mohan M. Trivedi Computer Vision and Robotics Research Laboratory University of California San Diego {eohnbar, mtrivedi}@ucsd.edu Abstract
Detection and Localization with Multi-scale Models Eshed Ohn-Bar and Mohan M. Trivedi Computer Vision and Robotics Research Laboratory University of California San Diego {eohnbar, mtrivedi}@ucsd.edu Abstract
Single-Shot Refinement Neural Network for Object Detection -Supplementary Material-
 Single-Shot Refinement Neural Network for Object Detection -Supplementary Material- Shifeng Zhang 1,2, Longyin Wen 3, Xiao Bian 3, Zhen Lei 1,2, Stan Z. Li 4,1,2 1 CBSR & NLPR, Institute of Automation,
Single-Shot Refinement Neural Network for Object Detection -Supplementary Material- Shifeng Zhang 1,2, Longyin Wen 3, Xiao Bian 3, Zhen Lei 1,2, Stan Z. Li 4,1,2 1 CBSR & NLPR, Institute of Automation,
Mobile Human Detection Systems based on Sliding Windows Approach-A Review
 Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
Estimating Human Pose in Images. Navraj Singh December 11, 2009
 Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Object Category Detection. Slides mostly from Derek Hoiem
 Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
CS229: Action Recognition in Tennis
 CS229: Action Recognition in Tennis Aman Sikka Stanford University Stanford, CA 94305 Rajbir Kataria Stanford University Stanford, CA 94305 asikka@stanford.edu rkataria@stanford.edu 1. Motivation As active
CS229: Action Recognition in Tennis Aman Sikka Stanford University Stanford, CA 94305 Rajbir Kataria Stanford University Stanford, CA 94305 asikka@stanford.edu rkataria@stanford.edu 1. Motivation As active
Find that! Visual Object Detection Primer
 Find that! Visual Object Detection Primer SkTech/MIT Innovation Workshop August 16, 2012 Dr. Tomasz Malisiewicz tomasz@csail.mit.edu Find that! Your Goals...imagine one such system that drives information
Find that! Visual Object Detection Primer SkTech/MIT Innovation Workshop August 16, 2012 Dr. Tomasz Malisiewicz tomasz@csail.mit.edu Find that! Your Goals...imagine one such system that drives information
Modern Object Detection. Most slides from Ali Farhadi
 Modern Object Detection Most slides from Ali Farhadi Comparison of Classifiers assuming x in {0 1} Learning Objective Training Inference Naïve Bayes maximize j i logp + logp ( x y ; θ ) ( y ; θ ) i ij
Modern Object Detection Most slides from Ali Farhadi Comparison of Classifiers assuming x in {0 1} Learning Objective Training Inference Naïve Bayes maximize j i logp + logp ( x y ; θ ) ( y ; θ ) i ij
Pedestrian Detection Using Structured SVM
 Pedestrian Detection Using Structured SVM Wonhui Kim Stanford University Department of Electrical Engineering wonhui@stanford.edu Seungmin Lee Stanford University Department of Electrical Engineering smlee729@stanford.edu.
Pedestrian Detection Using Structured SVM Wonhui Kim Stanford University Department of Electrical Engineering wonhui@stanford.edu Seungmin Lee Stanford University Department of Electrical Engineering smlee729@stanford.edu.
DPM Configurations for Human Interaction Detection
 DPM Configurations for Human Interaction Detection Coert van Gemeren Ronald Poppe Remco C. Veltkamp Interaction Technology Group, Department of Information and Computing Sciences, Utrecht University, The
DPM Configurations for Human Interaction Detection Coert van Gemeren Ronald Poppe Remco C. Veltkamp Interaction Technology Group, Department of Information and Computing Sciences, Utrecht University, The
Beyond Sliding Windows: Object Localization by Efficient Subwindow Search
 Beyond Sliding Windows: Object Localization by Efficient Subwindow Search Christoph H. Lampert, Matthew B. Blaschko, & Thomas Hofmann Max Planck Institute for Biological Cybernetics Tübingen, Germany Google,
Beyond Sliding Windows: Object Localization by Efficient Subwindow Search Christoph H. Lampert, Matthew B. Blaschko, & Thomas Hofmann Max Planck Institute for Biological Cybernetics Tübingen, Germany Google,
PASCAL VOC Classification: Local Features vs. Deep Features. Shuicheng YAN, NUS
 PASCAL VOC Classification: Local Features vs. Deep Features Shuicheng YAN, NUS PASCAL VOC Why valuable? Multi-label, Real Scenarios! Visual Object Recognition Object Classification Object Detection Object
PASCAL VOC Classification: Local Features vs. Deep Features Shuicheng YAN, NUS PASCAL VOC Why valuable? Multi-label, Real Scenarios! Visual Object Recognition Object Classification Object Detection Object
Do We Need More Training Data or Better Models for Object Detection?
 ZHU, VONDRICK, RAMANAN, AND FOWLKES: MORE DATA OR BETTER MODELS 1 Do We Need More Training Data or Better Models for Object Detection? Xiangxin Zhu 1 xzhu@ics.uci.edu Carl Vondrick 2 vondrick@mit.edu Deva
ZHU, VONDRICK, RAMANAN, AND FOWLKES: MORE DATA OR BETTER MODELS 1 Do We Need More Training Data or Better Models for Object Detection? Xiangxin Zhu 1 xzhu@ics.uci.edu Carl Vondrick 2 vondrick@mit.edu Deva
Combining PGMs and Discriminative Models for Upper Body Pose Detection
 Combining PGMs and Discriminative Models for Upper Body Pose Detection Gedas Bertasius May 30, 2014 1 Introduction In this project, I utilized probabilistic graphical models together with discriminative
Combining PGMs and Discriminative Models for Upper Body Pose Detection Gedas Bertasius May 30, 2014 1 Introduction In this project, I utilized probabilistic graphical models together with discriminative
Object Detection Based on Deep Learning
 Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Optimizing Intersection-Over-Union in Deep Neural Networks for Image Segmentation
 Optimizing Intersection-Over-Union in Deep Neural Networks for Image Segmentation Md Atiqur Rahman and Yang Wang Department of Computer Science, University of Manitoba, Canada {atique, ywang}@cs.umanitoba.ca
Optimizing Intersection-Over-Union in Deep Neural Networks for Image Segmentation Md Atiqur Rahman and Yang Wang Department of Computer Science, University of Manitoba, Canada {atique, ywang}@cs.umanitoba.ca
Spatial Localization and Detection. Lecture 8-1
 Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
The Caltech-UCSD Birds Dataset
 The Caltech-UCSD Birds-200-2011 Dataset Catherine Wah 1, Steve Branson 1, Peter Welinder 2, Pietro Perona 2, Serge Belongie 1 1 University of California, San Diego 2 California Institute of Technology
The Caltech-UCSD Birds-200-2011 Dataset Catherine Wah 1, Steve Branson 1, Peter Welinder 2, Pietro Perona 2, Serge Belongie 1 1 University of California, San Diego 2 California Institute of Technology
Graphical Models for Computer Vision
 Graphical Models for Computer Vision Pedro F Felzenszwalb Brown University Joint work with Dan Huttenlocher, Joshua Schwartz, Ross Girshick, David McAllester, Deva Ramanan, Allie Shapiro, John Oberlin
Graphical Models for Computer Vision Pedro F Felzenszwalb Brown University Joint work with Dan Huttenlocher, Joshua Schwartz, Ross Girshick, David McAllester, Deva Ramanan, Allie Shapiro, John Oberlin
A Discriminatively Trained, Multiscale, Deformable Part Model
 A Discriminatively Trained, Multiscale, Deformable Part Model by Pedro Felzenszwalb, David McAllester, and Deva Ramanan CS381V Visual Recognition - Paper Presentation Slide credit: Duan Tran Slide credit:
A Discriminatively Trained, Multiscale, Deformable Part Model by Pedro Felzenszwalb, David McAllester, and Deva Ramanan CS381V Visual Recognition - Paper Presentation Slide credit: Duan Tran Slide credit:
Actions and Attributes from Wholes and Parts
 Actions and Attributes from Wholes and Parts Georgia Gkioxari UC Berkeley gkioxari@berkeley.edu Ross Girshick Microsoft Research rbg@microsoft.com Jitendra Malik UC Berkeley malik@berkeley.edu Abstract
Actions and Attributes from Wholes and Parts Georgia Gkioxari UC Berkeley gkioxari@berkeley.edu Ross Girshick Microsoft Research rbg@microsoft.com Jitendra Malik UC Berkeley malik@berkeley.edu Abstract
Linear combinations of simple classifiers for the PASCAL challenge
 Linear combinations of simple classifiers for the PASCAL challenge Nik A. Melchior and David Lee 16 721 Advanced Perception The Robotics Institute Carnegie Mellon University Email: melchior@cmu.edu, dlee1@andrew.cmu.edu
Linear combinations of simple classifiers for the PASCAL challenge Nik A. Melchior and David Lee 16 721 Advanced Perception The Robotics Institute Carnegie Mellon University Email: melchior@cmu.edu, dlee1@andrew.cmu.edu
Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach
 Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach Vandit Gajjar gajjar.vandit.381@ldce.ac.in Ayesha Gurnani gurnani.ayesha.52@ldce.ac.in Yash Khandhediya khandhediya.yash.364@ldce.ac.in
Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach Vandit Gajjar gajjar.vandit.381@ldce.ac.in Ayesha Gurnani gurnani.ayesha.52@ldce.ac.in Yash Khandhediya khandhediya.yash.364@ldce.ac.in
A Study of Vehicle Detector Generalization on U.S. Highway
 26 IEEE 9th International Conference on Intelligent Transportation Systems (ITSC) Windsor Oceanico Hotel, Rio de Janeiro, Brazil, November -4, 26 A Study of Vehicle Generalization on U.S. Highway Rakesh
26 IEEE 9th International Conference on Intelligent Transportation Systems (ITSC) Windsor Oceanico Hotel, Rio de Janeiro, Brazil, November -4, 26 A Study of Vehicle Generalization on U.S. Highway Rakesh
Video Google faces. Josef Sivic, Mark Everingham, Andrew Zisserman. Visual Geometry Group University of Oxford
 Video Google faces Josef Sivic, Mark Everingham, Andrew Zisserman Visual Geometry Group University of Oxford The objective Retrieve all shots in a video, e.g. a feature length film, containing a particular
Video Google faces Josef Sivic, Mark Everingham, Andrew Zisserman Visual Geometry Group University of Oxford The objective Retrieve all shots in a video, e.g. a feature length film, containing a particular
Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task
 Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task Kyunghee Kim Stanford University 353 Serra Mall Stanford, CA 94305 kyunghee.kim@stanford.edu Abstract We use a
Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task Kyunghee Kim Stanford University 353 Serra Mall Stanford, CA 94305 kyunghee.kim@stanford.edu Abstract We use a
G-CNN: an Iterative Grid Based Object Detector
 G-CNN: an Iterative Grid Based Object Detector Mahyar Najibi 1, Mohammad Rastegari 1,2, Larry S. Davis 1 1 University of Maryland, College Park 2 Allen Institute for Artificial Intelligence najibi@cs.umd.edu
G-CNN: an Iterative Grid Based Object Detector Mahyar Najibi 1, Mohammad Rastegari 1,2, Larry S. Davis 1 1 University of Maryland, College Park 2 Allen Institute for Artificial Intelligence najibi@cs.umd.edu
Real-time Object Detection CS 229 Course Project
 Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Selective Search for Object Recognition
 Selective Search for Object Recognition Uijlings et al. Schuyler Smith Overview Introduction Object Recognition Selective Search Similarity Metrics Results Object Recognition Kitten Goal: Problem: Where
Selective Search for Object Recognition Uijlings et al. Schuyler Smith Overview Introduction Object Recognition Selective Search Similarity Metrics Results Object Recognition Kitten Goal: Problem: Where
A Discriminatively Trained, Multiscale, Deformable Part Model
 A Discriminatively Trained, Multiscale, Deformable Part Model Pedro Felzenszwalb University of Chicago pff@cs.uchicago.edu David McAllester Toyota Technological Institute at Chicago mcallester@tti-c.org
A Discriminatively Trained, Multiscale, Deformable Part Model Pedro Felzenszwalb University of Chicago pff@cs.uchicago.edu David McAllester Toyota Technological Institute at Chicago mcallester@tti-c.org
Semantic Segmentation without Annotating Segments
 Chapter 3 Semantic Segmentation without Annotating Segments Numerous existing object segmentation frameworks commonly utilize the object bounding box as a prior. In this chapter, we address semantic segmentation
Chapter 3 Semantic Segmentation without Annotating Segments Numerous existing object segmentation frameworks commonly utilize the object bounding box as a prior. In this chapter, we address semantic segmentation
Selection of Scale-Invariant Parts for Object Class Recognition
 Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Lecture 15: Detecting Objects by Parts
 Lecture 15: Detecting Objects by Parts David R. Morales, Austin O. Narcomey, Minh-An Quinn, Guilherme Reis, Omar Solis Department of Computer Science Stanford University Stanford, CA 94305 {mrlsdvd, aon2,
Lecture 15: Detecting Objects by Parts David R. Morales, Austin O. Narcomey, Minh-An Quinn, Guilherme Reis, Omar Solis Department of Computer Science Stanford University Stanford, CA 94305 {mrlsdvd, aon2,
Learning Realistic Human Actions from Movies
 Learning Realistic Human Actions from Movies Ivan Laptev*, Marcin Marszałek**, Cordelia Schmid**, Benjamin Rozenfeld*** INRIA Rennes, France ** INRIA Grenoble, France *** Bar-Ilan University, Israel Presented
Learning Realistic Human Actions from Movies Ivan Laptev*, Marcin Marszałek**, Cordelia Schmid**, Benjamin Rozenfeld*** INRIA Rennes, France ** INRIA Grenoble, France *** Bar-Ilan University, Israel Presented
Classification of objects from Video Data (Group 30)
") Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time
Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time
Tri-modal Human Body Segmentation
 Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Comparison of Object Detection Algorithms on Maritime Vessels Mark Chua 1, David W. Aha 2, Bryan Auslander 3, Kalyan Gupta 3, and Brendan Morris 1
 Comparison of Object Detection Algorithms on Maritime Vessels Mark Chua 1, David W. Aha 2, Bryan Auslander 3, Kalyan Gupta 3, and Brendan Morris 1 1 Department of Electrical and Computer Engineering; University
Comparison of Object Detection Algorithms on Maritime Vessels Mark Chua 1, David W. Aha 2, Bryan Auslander 3, Kalyan Gupta 3, and Brendan Morris 1 1 Department of Electrical and Computer Engineering; University
Hierarchical Learning for Object Detection. Long Zhu, Yuanhao Chen, William Freeman, Alan Yuille, Antonio Torralba MIT and UCLA, 2010
 Hierarchical Learning for Object Detection Long Zhu, Yuanhao Chen, William Freeman, Alan Yuille, Antonio Torralba MIT and UCLA, 2010 Background I: Our prior work Our work for the Pascal Challenge is based
Hierarchical Learning for Object Detection Long Zhu, Yuanhao Chen, William Freeman, Alan Yuille, Antonio Torralba MIT and UCLA, 2010 Background I: Our prior work Our work for the Pascal Challenge is based
Window based detectors
 Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Part Discovery from Partial Correspondence
 Part Discovery from Partial Correspondence Subhransu Maji Gregory Shakhnarovich Toyota Technological Institute at Chicago, IL, USA Abstract We study the problem of part discovery when partial correspondence
Part Discovery from Partial Correspondence Subhransu Maji Gregory Shakhnarovich Toyota Technological Institute at Chicago, IL, USA Abstract We study the problem of part discovery when partial correspondence
Part based models for recognition. Kristen Grauman
 Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Is 2D Information Enough For Viewpoint Estimation? Amir Ghodrati, Marco Pedersoli, Tinne Tuytelaars BMVC 2014
 Is 2D Information Enough For Viewpoint Estimation? Amir Ghodrati, Marco Pedersoli, Tinne Tuytelaars BMVC 2014 Problem Definition Viewpoint estimation: Given an image, predicting viewpoint for object of
Is 2D Information Enough For Viewpoint Estimation? Amir Ghodrati, Marco Pedersoli, Tinne Tuytelaars BMVC 2014 Problem Definition Viewpoint estimation: Given an image, predicting viewpoint for object of
Object Segmentation by Alignment of Poselet Activations to Image Contours
 Object Segmentation by Alignment of Poselet Activations to Image Contours Thomas Brox 1, Lubomir Bourdev 2,3, Subhransu Maji 2, and Jitendra Malik 2 1 University of Freiburg, Germany 2 University of California
Object Segmentation by Alignment of Poselet Activations to Image Contours Thomas Brox 1, Lubomir Bourdev 2,3, Subhransu Maji 2, and Jitendra Malik 2 1 University of Freiburg, Germany 2 University of California
Apprenticeship Learning: Transfer of Knowledge via Dataset Augmentation
 Apprenticeship Learning: Transfer of Knowledge via Dataset Augmentation Miroslav Kobetski and Josephine Sullivan Computer Vision and Active Perception, KTH, 114 28 Stockholm kobetski@kth.se, sullivan@nada.kth.se
Apprenticeship Learning: Transfer of Knowledge via Dataset Augmentation Miroslav Kobetski and Josephine Sullivan Computer Vision and Active Perception, KTH, 114 28 Stockholm kobetski@kth.se, sullivan@nada.kth.se
Robust PDF Table Locator
 Robust PDF Table Locator December 17, 2016 1 Introduction Data scientists rely on an abundance of tabular data stored in easy-to-machine-read formats like.csv files. Unfortunately, most government records
Robust PDF Table Locator December 17, 2016 1 Introduction Data scientists rely on an abundance of tabular data stored in easy-to-machine-read formats like.csv files. Unfortunately, most government records
Bird Part Localization Using Exemplar-Based Models with Enforced Pose and Subcategory Consistency
 Bird Part Localization Using Exemplar-Based Models with Enforced Pose and Subcategory Consistency Jiongxin Liu and Peter N. Belhumeur Columbia University {liujx09, belhumeur}@cs.columbia.edu Abstract In
Bird Part Localization Using Exemplar-Based Models with Enforced Pose and Subcategory Consistency Jiongxin Liu and Peter N. Belhumeur Columbia University {liujx09, belhumeur}@cs.columbia.edu Abstract In
FPM: Fine Pose Parts-Based Model with 3D CAD Models
 FPM: Fine Pose Parts-Based Model with 3D CAD Models The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation As Published Publisher
FPM: Fine Pose Parts-Based Model with 3D CAD Models The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation As Published Publisher
Object Recognition with Deformable Models
 Object Recognition with Deformable Models Pedro F. Felzenszwalb Department of Computer Science University of Chicago Joint work with: Dan Huttenlocher, Joshua Schwartz, David McAllester, Deva Ramanan.
Object Recognition with Deformable Models Pedro F. Felzenszwalb Department of Computer Science University of Chicago Joint work with: Dan Huttenlocher, Joshua Schwartz, David McAllester, Deva Ramanan.
Indexing Ensembles of Exemplar-SVMs with Rejecting Taxonomies for Fast Evaluation
 Indexing Ensembles of Exemplar-SVMs with Rejecting Taxonomies for Fast Evaluation Federico Becattini Lorenzo Seidenari Alberto Del Bimbo University of Florence federico.becattini@unifi.it University of
Indexing Ensembles of Exemplar-SVMs with Rejecting Taxonomies for Fast Evaluation Federico Becattini Lorenzo Seidenari Alberto Del Bimbo University of Florence federico.becattini@unifi.it University of
Fast, Accurate Detection of 100,000 Object Classes on a Single Machine
 Fast, Accurate Detection of 100,000 Object Classes on a Single Machine Thomas Dean etal. Google, Mountain View, CA CVPR 2013 best paper award Presented by: Zhenhua Wang 2013.12.10 Outline Background This
Fast, Accurate Detection of 100,000 Object Classes on a Single Machine Thomas Dean etal. Google, Mountain View, CA CVPR 2013 best paper award Presented by: Zhenhua Wang 2013.12.10 Outline Background This
Object Detection with YOLO on Artwork Dataset
 Object Detection with YOLO on Artwork Dataset Yihui He Computer Science Department, Xi an Jiaotong University heyihui@stu.xjtu.edu.cn Abstract Person: 0.64 Horse: 0.28 I design a small object detection
Object Detection with YOLO on Artwork Dataset Yihui He Computer Science Department, Xi an Jiaotong University heyihui@stu.xjtu.edu.cn Abstract Person: 0.64 Horse: 0.28 I design a small object detection
Detecting and Parsing of Visual Objects: Humans and Animals. Alan Yuille (UCLA)
") Detecting and Parsing of Visual Objects: Humans and Animals Alan Yuille (UCLA) Summary This talk describes recent work on detection and parsing visual objects. The methods represent objects in terms of
Detecting and Parsing of Visual Objects: Humans and Animals Alan Yuille (UCLA) Summary This talk describes recent work on detection and parsing visual objects. The methods represent objects in terms of
Supplementary Material for Ensemble Diffusion for Retrieval
 Supplementary Material for Ensemble Diffusion for Retrieval Song Bai 1, Zhichao Zhou 1, Jingdong Wang, Xiang Bai 1, Longin Jan Latecki 3, Qi Tian 4 1 Huazhong University of Science and Technology, Microsoft
Supplementary Material for Ensemble Diffusion for Retrieval Song Bai 1, Zhichao Zhou 1, Jingdong Wang, Xiang Bai 1, Longin Jan Latecki 3, Qi Tian 4 1 Huazhong University of Science and Technology, Microsoft
Multiple-Person Tracking by Detection
 http://excel.fit.vutbr.cz Multiple-Person Tracking by Detection Jakub Vojvoda* Abstract Detection and tracking of multiple person is challenging problem mainly due to complexity of scene and large intra-class
http://excel.fit.vutbr.cz Multiple-Person Tracking by Detection Jakub Vojvoda* Abstract Detection and tracking of multiple person is challenging problem mainly due to complexity of scene and large intra-class
Multi-instance Object Segmentation with Occlusion Handling
 Multi-instance Object Segmentation with Occlusion Handling Yi-Ting Chen 1 Xiaokai Liu 1,2 Ming-Hsuan Yang 1 University of California at Merced 1 Dalian University of Technology 2 Abstract We present a
Multi-instance Object Segmentation with Occlusion Handling Yi-Ting Chen 1 Xiaokai Liu 1,2 Ming-Hsuan Yang 1 University of California at Merced 1 Dalian University of Technology 2 Abstract We present a
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
Learning and Recognizing Visual Object Categories Without First Detecting Features
 Learning and Recognizing Visual Object Categories Without First Detecting Features Daniel Huttenlocher 2007 Joint work with D. Crandall and P. Felzenszwalb Object Category Recognition Generic classes rather
Learning and Recognizing Visual Object Categories Without First Detecting Features Daniel Huttenlocher 2007 Joint work with D. Crandall and P. Felzenszwalb Object Category Recognition Generic classes rather
Deformable Part Models Revisited: A Performance Evaluation for Object Category Pose Estimation
 Deformable Part Models Revisited: A Performance Evaluation for Object Category Pose Estimation Roberto J. Lo pez-sastre Tinne Tuytelaars2 Silvio Savarese3 GRAM, Dept. Signal Theory and Communications,
Deformable Part Models Revisited: A Performance Evaluation for Object Category Pose Estimation Roberto J. Lo pez-sastre Tinne Tuytelaars2 Silvio Savarese3 GRAM, Dept. Signal Theory and Communications,
Category vs. instance recognition
 Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
An Efficient Divide-and-Conquer Cascade for Nonlinear Object Detection
 An Efficient Divide-and-Conquer Cascade for Nonlinear Object Detection Christoph H. Lampert Max Planck Institute for Biological Cybernetics, Tübingen, Germany chl@tuebingen.mpg.de Abstract We introduce
An Efficient Divide-and-Conquer Cascade for Nonlinear Object Detection Christoph H. Lampert Max Planck Institute for Biological Cybernetics, Tübingen, Germany chl@tuebingen.mpg.de Abstract We introduce
Detecting Object Instances Without Discriminative Features
 Detecting Object Instances Without Discriminative Features Edward Hsiao June 19, 2013 Thesis Committee: Martial Hebert, Chair Alexei Efros Takeo Kanade Andrew Zisserman, University of Oxford 1 Object Instance
Detecting Object Instances Without Discriminative Features Edward Hsiao June 19, 2013 Thesis Committee: Martial Hebert, Chair Alexei Efros Takeo Kanade Andrew Zisserman, University of Oxford 1 Object Instance
CS229 Final Project Report. A Multi-Task Feature Learning Approach to Human Detection. Tiffany Low
 CS229 Final Project Report A Multi-Task Feature Learning Approach to Human Detection Tiffany Low tlow@stanford.edu Abstract We focus on the task of human detection using unsupervised pre-trained neutral
CS229 Final Project Report A Multi-Task Feature Learning Approach to Human Detection Tiffany Low tlow@stanford.edu Abstract We focus on the task of human detection using unsupervised pre-trained neutral
Deformable Part Models
 Deformable Part Models References: Felzenszwalb, Girshick, McAllester and Ramanan, Object Detec@on with Discrimina@vely Trained Part Based Models, PAMI 2010 Code available at hkp://www.cs.berkeley.edu/~rbg/latent/
Deformable Part Models References: Felzenszwalb, Girshick, McAllester and Ramanan, Object Detec@on with Discrimina@vely Trained Part Based Models, PAMI 2010 Code available at hkp://www.cs.berkeley.edu/~rbg/latent/
Efficient Detector Adaptation for Object Detection in a Video
 2013 IEEE Conference on Computer Vision and Pattern Recognition Efficient Detector Adaptation for Object Detection in a Video Pramod Sharma and Ram Nevatia Institute for Robotics and Intelligent Systems,
2013 IEEE Conference on Computer Vision and Pattern Recognition Efficient Detector Adaptation for Object Detection in a Video Pramod Sharma and Ram Nevatia Institute for Robotics and Intelligent Systems,
HIERARCHICAL JOINT-GUIDED NETWORKS FOR SEMANTIC IMAGE SEGMENTATION
 HIERARCHICAL JOINT-GUIDED NETWORKS FOR SEMANTIC IMAGE SEGMENTATION Chien-Yao Wang, Jyun-Hong Li, Seksan Mathulaprangsan, Chin-Chin Chiang, and Jia-Ching Wang Department of Computer Science and Information
HIERARCHICAL JOINT-GUIDED NETWORKS FOR SEMANTIC IMAGE SEGMENTATION Chien-Yao Wang, Jyun-Hong Li, Seksan Mathulaprangsan, Chin-Chin Chiang, and Jia-Ching Wang Department of Computer Science and Information
Sketchable Histograms of Oriented Gradients for Object Detection
 Sketchable Histograms of Oriented Gradients for Object Detection No Author Given No Institute Given Abstract. In this paper we investigate a new representation approach for visual object recognition. The
Sketchable Histograms of Oriented Gradients for Object Detection No Author Given No Institute Given Abstract. In this paper we investigate a new representation approach for visual object recognition. The
Layered Object Detection for Multi-Class Segmentation
 Layered Object Detection for Multi-Class Segmentation Yi Yang Sam Hallman Deva Ramanan Charless Fowlkes Dept. of Computer Science, University of California, Irvine {yangyi,shallman,dramanan,fowlkes}@ics.uci.edu
Layered Object Detection for Multi-Class Segmentation Yi Yang Sam Hallman Deva Ramanan Charless Fowlkes Dept. of Computer Science, University of California, Irvine {yangyi,shallman,dramanan,fowlkes}@ics.uci.edu
Su et al. Shape Descriptors - III
 Su et al. Shape Descriptors - III Siddhartha Chaudhuri http://www.cse.iitb.ac.in/~cs749 Funkhouser; Feng, Liu, Gong Recap Global A shape descriptor is a set of numbers that describes a shape in a way that
Su et al. Shape Descriptors - III Siddhartha Chaudhuri http://www.cse.iitb.ac.in/~cs749 Funkhouser; Feng, Liu, Gong Recap Global A shape descriptor is a set of numbers that describes a shape in a way that