DescriptorEnsemble: An Unsupervised Approach to Image Matching and Alignment with Multiple Descriptors
|
|
|
- Garey Goodwin
- 5 years ago
- Views:
Transcription

1 DescriptorEnsemble: An Unsupervised Approach to Image Matching and Alignment with Multiple Descriptors 林彥宇副研究員 Yen-Yu Lin, Associate Research Fellow 中央研究院資訊科技創新研究中心 Research Center for IT Innovation, Academia Sinica
2 About myself Yen-Yu Lin, Ph.D., Associate research fellow, CITI, Academia Sinica Education Ph.D. in CSIE, National Taiwan University, M.S. in CSIE, National Taiwan University, B.B.A. in IM, National Taiwan University, Work experience Assistant research fellow, Research assistant, IIS, Academia Sinica, Research interests Computer vision Object recognition, image segmentation, action recognition, people counting, Machine learning Kernel methods, boosting, transfer learning, graphical model, deep learning, 2
3 Computer vision and machine learning Research interests: Computer Vision (CV): Let computers see, recognize, and interpret the world like humans Machine Learning (ML): A statistical way to learn how human visual system works Goal: Design ML methods to facilitate CV applications 3





4 Research topics 1/3 bicycles? dogs? trains? persons? CV: object recognition ML: multiple kernel learning TPAMI 11, ICCV 09, NIPS 08 CV: image segmentation ML: graphical model CVPR 14, TIP 14, ACCV 12 CV: face detection ML: vector-valued boosting US Patent 07, CVPR 05, ECCV 04 4




5 Research topics 2/3 CV: action recognition ML: low-rank reconstruction TIP 15, CVPR 14, ICASSP 14 CV: hyperspectral classification ML: multiple kernel learning TGRS 15 CV: image clustering TMM 14, ICPR 12, ECCV 10 ML: self-organizing map 5





6 Research topics 3/3 CV: multi-view people counting ML: transfer learning TIP 15, ACM MM 12, WIFS 11 CV: image matching ML: kernel density estimation TIP 16, TPAMI 15, CVPR 15, CVPR 13 6



7 Image matching Seek common objects and regions between images Salient point detection + Description + Matching 7









8 Image alignment Image matching: sparse matching on interest points Image alignment: dense matching on pixels Liu et al








9 Fundamental research topics 3D Reconstruction Image Retrieval Agarwal et al Zheng et al Panorama Stitching Brown and Lowe



10 Motivation 1/2 Three different descriptors on two image pairs SIFT LIOP GB 10
11 Motivation 2/2 The optimal descriptor for matching varies from image to image The effectiveness of a descriptor is image dependent Descriptor fusion may be a feasible way for improving the performance of both sparse and dense matching Two difficulties arise Descriptor variations: different dimensions, scales, distances, A common domain for fusing descriptors Unsupervised nature of image matching/alignment A measure for estimating the goodness of descriptors 11

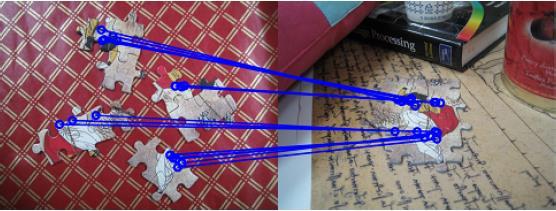
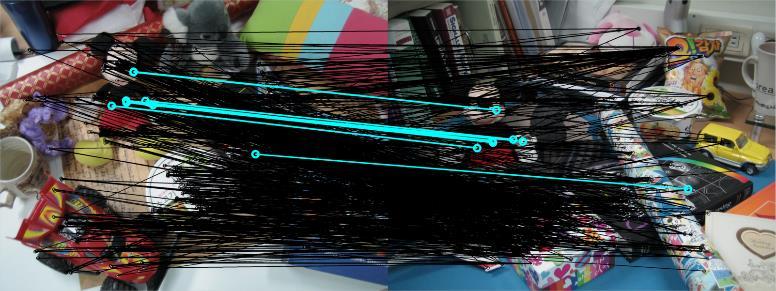
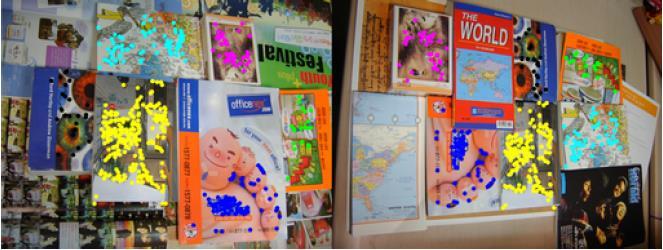
12 Observation 1/3 A pair of images with the detected points 12

13 Observation 2/3 A pair of images with the detected points Wrong matches 13

14 Observation 3/3 A pair of images with the detected points Correct matches High geometric and spatial consistence 14




15 DescriptorEnsemble for Unsupervised descriptor fusion GB DAISY LIOP SIFT Affine Transformation Space 15
16 DescriptorEnsemble for image matching Collect a set of plausible match candidates For each point and each descriptor, find its k NNs in the opposite image Total N k M match candidates Construct a graph Create a node for each match candidate Add an edge between two neighboring candidates (spatial consistence) Set the edge weight as the re-projection error (geometric consistence) Compute the geodesic distance between each candidate pair One-class SVM for candidate ranking Positive data gather together (Correct matches have high density) Negative data are negative in their own ways (Wrong matches irregularly distribute) 16
17 Experiments: Dataset 1/4 Three datasets: Co-recognition Dataset (Co-reg) Cho et al Symmetric Dataset (SYM) Hauagge and Snavely 2012 Oxford VGG Dataset (VGG) Mikolajczyk and Schmid











18 Experiments: Dataset 2/4 Co-reg dataset: 6 image pairs Multiple common objects with cluttered backgrounds 18




19 Experiments: Dataset 3/4 SYM dataset: 43 image pairs Various variations: ages, rendering styles, day/night 19








20 Experiments: Dataset 4/4 VGG dataset: 8 image pairs Each pair contains only one or two transformation 20
21 Experiments: Descriptor SIFT [Lowe 2004] LIOP [Wang et al. 2011] DAISY [Tola et al. 2010] Raw Intensities(RI) Geometric Blur(GB) [Berg and Malik 2001] Affine Invariant SIFT DAISY Shape GB RI Color LIOP Illumination 21
22 Experiments: Competing methods Image matching baselines ACC [Cho et al. 2009] HV [Chen et al. 2013] SM [Leordeanu and Hebert 2005] VFC [Ma et al. 2014] Fusion baselines Concatenation (Conca.) Conca. + HV Ranking Ratio 22
23 Experiments: Quantitative results Performance in map (mean of Average Precision) 23
24 Summary DescriptorEnsemble for image matching: A general approach to matching images with multiple, complementary descriptors It works with any elliptical interest region detectors Hessian-affine, Harris-affine, MSER, or their combinations It makes no assumption about the adopted descriptors, and fuses them in the domain of affine transformations SIFT, geometric blur, LIOP, DAYSI, self-similarity descriptor, Off-the-shelf solvers Dijkstra s algorithm for computing geometric distances LibSVM for one-class SVM 24
25 DescriptorEnsemble for image alignment An approach that leverages multiple complementary descriptors and matching-guided neighborhoods to enhance descriptor-based image alignment Multiple descriptors: the optimal descriptor typically varies from image to image, or even pixel to pixel Matching guided neighborhood: object boundaries better reveal during the process of alignment 25

26 Challenges 26
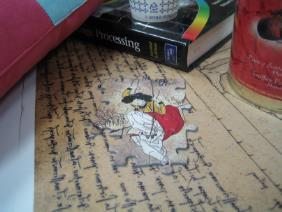
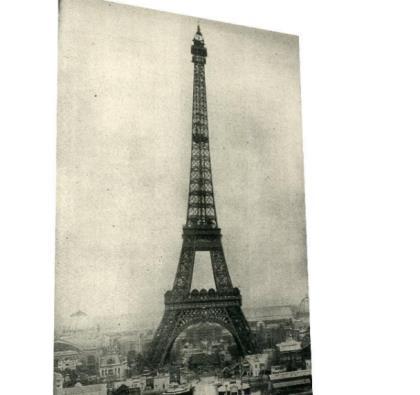
![Observation 1 The optimal descriptor typically varies from image to image, or even pixel to pixel (a) I 1 (b) I 2 (c) SIFT (d) GB [1] (e) LIOP [2] Ours](/docs-images/95/124149020/images/27-0.jpg "[1] Berg and Malik, Geometric blur for template matching, CVPR, 2001 [2] Wang, et al.")
27 Observation 1 The optimal descriptor typically varies from image to image, or even pixel to pixel (a) I 1 (b) I 2 (c) SIFT (d) GB [1] (e) LIOP [2] Ours [1] Berg and Malik, Geometric blur for template matching, CVPR, 2001 [2] Wang, et al., Local intensity order pattern for feature description, ICCV,
28 Observation 2 Neighborhood for smoothness enforcement should be consistent with object boundaries Object boundaries can be better discovered during the process of alignment (a) Gaussian weight. (b) Bilateral weight. (c) Ours. 28
29 Our idea Associate each pixel to be aligned with an affine matrix The affine matrix approximates the local flow map centered on that pixel Affine matrices serve as the common domain for fusion Associate each pixel with a learnable neighborhood Better neighborhood facilitates image alignment Better alignment results help reveal the underlying neighborhood Integrate the learning of pixel-specific affine matrix and neighborhood into image alignment 29





30 Our approach: an overview input output 30
31 The optimization problem Alignment objective: We adopt an alternate optimization procedure 31

32 The optimization problem: On optimizing A By fixing L and E, it leads to a weighted least square problem: A closed-form solution exists. 32

33 The optimization problem: On optimizing E By fixing L and A, it leads to a convex quadratic programming problem: 33

34 The optimization problem: On optimizing L By fixing E and A, it leads to a labeling problem, and is solved by graph cuts: 34
35 Matching-guided neighborhood (a) Gaussian weight. (b) Bilateral weight. (c) Ours. 35
36 Quantitative results Datasets and evaluation metrics: VGG: ratio of correct matches MSRC: intersection / union Caltech: intersection / union LMO: accuracy Descriptors: [SIFT] Lowe, IJCV, 2004 [GB] Berg and Malik, CVPR, 2001 [DAISY] Tola et al., TPAMI, 2010 [LIOP] Wang, et al., ICCV, 2011 Competing approaches: [3] Barnes et al., ECCV, 2010 [24] Liu et al., TPAMI, 2011 [41] Yang et al., CVPR,

37 Visualization results 37





38 Matching-guided co-segmentation Transformation clustering Image co-segmentation by DALCIM [Joulin et al. CVPR 12] Ours: matching guided co-segmentation 38
39 Summary DescriptorEensemble: An unsupervised approach to descriptor fusion in the domain of affine transformations Ongoing research Seek a unified formulation of DescriptorEnsmble Explore its computer vision applications Combine sparse matching and dense matching (alignment) Related papers: H.-Y. Chen, Y.-Y. Lin, and B.-Y. Chen, "Robust Feature Matching with Alternate Hough and Inverted Hough Transforms," IEEE Int l Conf. on Computer Vision and Pattern Recognition (CVPR), 2013 K.-J. Hsu, Y.-Y. Lin, and Y.-Y. Chuang, "Robust Image Alignment with Multiple Feature Descriptors and Matching-Guided Neighborhoods," IEEE Int l Conf. on Computer Vision and Pattern Recognition (CVPR), 2015 H.-Y. Chen, Y.-Y. Lin, and B.-Y. Chen, "Co-Segmentation Guided Hough Transform for Robust Feature Matching," to appear in IEEE Trans. on Pattern Analysis and Machine Intelligence (TPAMI). Y.-T. Hu, Y.-Y. Lin, H.-Y. Chen, K.-J. Hsu and B.-Y. Chen, "Matching Images with Multiple Descriptors: An Unsupervised Approach for Locally Adaptive Descriptor Selection,"," to appear in IEEE Trans. on Image Processing (TIP). 39
40 Thank You for Your Attention! Yen-Yu Lin ( 林彥宇 ) yylin@citi.sinica.edu.tw 40
Evaluation and comparison of interest points/regions
 Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Prof. Feng Liu. Spring /26/2017
 Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/26/2017 Last Time Re-lighting HDR 2 Today Panorama Overview Feature detection Mid-term project presentation Not real mid-term 6
Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/26/2017 Last Time Re-lighting HDR 2 Today Panorama Overview Feature detection Mid-term project presentation Not real mid-term 6
Local Image Features
 Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
An Evaluation of Volumetric Interest Points
 An Evaluation of Volumetric Interest Points Tsz-Ho YU Oliver WOODFORD Roberto CIPOLLA Machine Intelligence Lab Department of Engineering, University of Cambridge About this project We conducted the first
An Evaluation of Volumetric Interest Points Tsz-Ho YU Oliver WOODFORD Roberto CIPOLLA Machine Intelligence Lab Department of Engineering, University of Cambridge About this project We conducted the first
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
Selection of Scale-Invariant Parts for Object Class Recognition
 Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Local features and image matching. Prof. Xin Yang HUST
 Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Feature Detection. Raul Queiroz Feitosa. 3/30/2017 Feature Detection 1
 Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Detecting Multiple Symmetries with Extended SIFT
 1 Detecting Multiple Symmetries with Extended SIFT 2 3 Anonymous ACCV submission Paper ID 388 4 5 6 7 8 9 10 11 12 13 14 15 16 Abstract. This paper describes an effective method for detecting multiple
1 Detecting Multiple Symmetries with Extended SIFT 2 3 Anonymous ACCV submission Paper ID 388 4 5 6 7 8 9 10 11 12 13 14 15 16 Abstract. This paper describes an effective method for detecting multiple
III. VERVIEW OF THE METHODS
 An Analytical Study of SIFT and SURF in Image Registration Vivek Kumar Gupta, Kanchan Cecil Department of Electronics & Telecommunication, Jabalpur engineering college, Jabalpur, India comparing the distance
An Analytical Study of SIFT and SURF in Image Registration Vivek Kumar Gupta, Kanchan Cecil Department of Electronics & Telecommunication, Jabalpur engineering college, Jabalpur, India comparing the distance
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Building a Panorama. Matching features. Matching with Features. How do we build a panorama? Computational Photography, 6.882
 Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES
 IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES Pin-Syuan Huang, Jing-Yi Tsai, Yu-Fang Wang, and Chun-Yi Tsai Department of Computer Science and Information Engineering, National Taitung University,
IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES Pin-Syuan Huang, Jing-Yi Tsai, Yu-Fang Wang, and Chun-Yi Tsai Department of Computer Science and Information Engineering, National Taitung University,
Local features: detection and description May 12 th, 2015
 Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local Image Features
 Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi
 Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi hrazvi@stanford.edu 1 Introduction: We present a method for discovering visual hierarchy in a set of images. Automatically grouping
Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi hrazvi@stanford.edu 1 Introduction: We present a method for discovering visual hierarchy in a set of images. Automatically grouping
Local Image Features
 Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
CS229: Action Recognition in Tennis
 CS229: Action Recognition in Tennis Aman Sikka Stanford University Stanford, CA 94305 Rajbir Kataria Stanford University Stanford, CA 94305 asikka@stanford.edu rkataria@stanford.edu 1. Motivation As active
CS229: Action Recognition in Tennis Aman Sikka Stanford University Stanford, CA 94305 Rajbir Kataria Stanford University Stanford, CA 94305 asikka@stanford.edu rkataria@stanford.edu 1. Motivation As active
Using Geometric Blur for Point Correspondence
 1 Using Geometric Blur for Point Correspondence Nisarg Vyas Electrical and Computer Engineering Department, Carnegie Mellon University, Pittsburgh, PA Abstract In computer vision applications, point correspondence
1 Using Geometric Blur for Point Correspondence Nisarg Vyas Electrical and Computer Engineering Department, Carnegie Mellon University, Pittsburgh, PA Abstract In computer vision applications, point correspondence
IMPROVING SPATIO-TEMPORAL FEATURE EXTRACTION TECHNIQUES AND THEIR APPLICATIONS IN ACTION CLASSIFICATION. Maral Mesmakhosroshahi, Joohee Kim
 IMPROVING SPATIO-TEMPORAL FEATURE EXTRACTION TECHNIQUES AND THEIR APPLICATIONS IN ACTION CLASSIFICATION Maral Mesmakhosroshahi, Joohee Kim Department of Electrical and Computer Engineering Illinois Institute
IMPROVING SPATIO-TEMPORAL FEATURE EXTRACTION TECHNIQUES AND THEIR APPLICATIONS IN ACTION CLASSIFICATION Maral Mesmakhosroshahi, Joohee Kim Department of Electrical and Computer Engineering Illinois Institute
Selection of Scale-Invariant Parts for Object Class Recognition
 Selection of Scale-Invariant Parts for Object Class Recognition Gyuri Dorkó, Cordelia Schmid To cite this version: Gyuri Dorkó, Cordelia Schmid. Selection of Scale-Invariant Parts for Object Class Recognition.
Selection of Scale-Invariant Parts for Object Class Recognition Gyuri Dorkó, Cordelia Schmid To cite this version: Gyuri Dorkó, Cordelia Schmid. Selection of Scale-Invariant Parts for Object Class Recognition.
Click to edit title style
 Class 2: Low-level Representation Liangliang Cao, Jan 31, 2013 EECS 6890 Topics in Information Processing Spring 2013, Columbia University http://rogerioferis.com/visualrecognitionandsearch Visual Recognition
Class 2: Low-level Representation Liangliang Cao, Jan 31, 2013 EECS 6890 Topics in Information Processing Spring 2013, Columbia University http://rogerioferis.com/visualrecognitionandsearch Visual Recognition
A Comparison of SIFT, PCA-SIFT and SURF
 A Comparison of SIFT, PCA-SIFT and SURF Luo Juan Computer Graphics Lab, Chonbuk National University, Jeonju 561-756, South Korea qiuhehappy@hotmail.com Oubong Gwun Computer Graphics Lab, Chonbuk National
A Comparison of SIFT, PCA-SIFT and SURF Luo Juan Computer Graphics Lab, Chonbuk National University, Jeonju 561-756, South Korea qiuhehappy@hotmail.com Oubong Gwun Computer Graphics Lab, Chonbuk National
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT. Recap and Outline
 EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
Midterm Wed. Local features: detection and description. Today. Last time. Local features: main components. Goal: interest operator repeatability
 Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Learning Visual Semantics: Models, Massive Computation, and Innovative Applications
 Learning Visual Semantics: Models, Massive Computation, and Innovative Applications Part II: Visual Features and Representations Liangliang Cao, IBM Watson Research Center Evolvement of Visual Features
Learning Visual Semantics: Models, Massive Computation, and Innovative Applications Part II: Visual Features and Representations Liangliang Cao, IBM Watson Research Center Evolvement of Visual Features
Learning to Recognize Faces in Realistic Conditions
 000 001 002 003 004 005 006 007 008 009 010 011 012 013 014 015 016 017 018 019 020 021 022 023 024 025 026 027 028 029 030 031 032 033 034 035 036 037 038 039 040 041 042 043 044 045 046 047 048 049 050
000 001 002 003 004 005 006 007 008 009 010 011 012 013 014 015 016 017 018 019 020 021 022 023 024 025 026 027 028 029 030 031 032 033 034 035 036 037 038 039 040 041 042 043 044 045 046 047 048 049 050
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Part-based and local feature models for generic object recognition
 Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Local invariant features
 Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Progressive Feature Matching with Alternate Descriptor Selection and Correspondence Enrichment
 Progressive Feature Matching with Alternate Descriptor Selection and Correspondence Enrichment Yuan-Ting Hu Yen-Yu Lin Academia Sinica, Taiwan Abstract We address two difficulties in establishing an accurate
Progressive Feature Matching with Alternate Descriptor Selection and Correspondence Enrichment Yuan-Ting Hu Yen-Yu Lin Academia Sinica, Taiwan Abstract We address two difficulties in establishing an accurate
A NEW FEATURE BASED IMAGE REGISTRATION ALGORITHM INTRODUCTION
 A NEW FEATURE BASED IMAGE REGISTRATION ALGORITHM Karthik Krish Stuart Heinrich Wesley E. Snyder Halil Cakir Siamak Khorram North Carolina State University Raleigh, 27695 kkrish@ncsu.edu sbheinri@ncsu.edu
A NEW FEATURE BASED IMAGE REGISTRATION ALGORITHM Karthik Krish Stuart Heinrich Wesley E. Snyder Halil Cakir Siamak Khorram North Carolina State University Raleigh, 27695 kkrish@ncsu.edu sbheinri@ncsu.edu
Previously. Part-based and local feature models for generic object recognition. Bag-of-words model 4/20/2011
 Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Visual Object Recognition
 Perceptual and Sensory Augmented Computing Visual Object Recognition Tutorial Visual Object Recognition Bastian Leibe Computer Vision Laboratory ETH Zurich Chicago, 14.07.2008 & Kristen Grauman Department
Perceptual and Sensory Augmented Computing Visual Object Recognition Tutorial Visual Object Recognition Bastian Leibe Computer Vision Laboratory ETH Zurich Chicago, 14.07.2008 & Kristen Grauman Department
Lecture 18: Human Motion Recognition
 Lecture 18: Human Motion Recognition Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Introduction Motion classification using template matching Motion classification i using spatio
Lecture 18: Human Motion Recognition Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Introduction Motion classification using template matching Motion classification i using spatio
A Comparison and Matching Point Extraction of SIFT and ISIFT
 A Comparison and Matching Point Extraction of SIFT and ISIFT A. Swapna A. Geetha Devi M.Tech Scholar, PVPSIT, Vijayawada Associate Professor, PVPSIT, Vijayawada bswapna.naveen@gmail.com geetha.agd@gmail.com
A Comparison and Matching Point Extraction of SIFT and ISIFT A. Swapna A. Geetha Devi M.Tech Scholar, PVPSIT, Vijayawada Associate Professor, PVPSIT, Vijayawada bswapna.naveen@gmail.com geetha.agd@gmail.com
Scale Invariant Feature Transform
 Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
CS 4495 Computer Vision A. Bobick. CS 4495 Computer Vision. Features 2 SIFT descriptor. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
Multiple Kernel Learning for Emotion Recognition in the Wild
 Multiple Kernel Learning for Emotion Recognition in the Wild Karan Sikka, Karmen Dykstra, Suchitra Sathyanarayana, Gwen Littlewort and Marian S. Bartlett Machine Perception Laboratory UCSD EmotiW Challenge,
Multiple Kernel Learning for Emotion Recognition in the Wild Karan Sikka, Karmen Dykstra, Suchitra Sathyanarayana, Gwen Littlewort and Marian S. Bartlett Machine Perception Laboratory UCSD EmotiW Challenge,
Computer Vision. Exercise 3 Panorama Stitching 09/12/2013. Compute Vision : Exercise 3 Panorama Stitching
 Computer Vision Exercise 3 Panorama Stitching 09/12/2013 Compute Vision : Exercise 3 Panorama Stitching The task Compute Vision : Exercise 3 Panorama Stitching 09/12/2013 2 Pipeline Compute Vision : Exercise
Computer Vision Exercise 3 Panorama Stitching 09/12/2013 Compute Vision : Exercise 3 Panorama Stitching The task Compute Vision : Exercise 3 Panorama Stitching 09/12/2013 2 Pipeline Compute Vision : Exercise
Vision and Image Processing Lab., CRV Tutorial day- May 30, 2010 Ottawa, Canada
 Spatio-Temporal Salient Features Amir H. Shabani Vision and Image Processing Lab., University of Waterloo, ON CRV Tutorial day- May 30, 2010 Ottawa, Canada 1 Applications Automated surveillance for scene
Spatio-Temporal Salient Features Amir H. Shabani Vision and Image Processing Lab., University of Waterloo, ON CRV Tutorial day- May 30, 2010 Ottawa, Canada 1 Applications Automated surveillance for scene
Introduction. Introduction. Related Research. SIFT method. SIFT method. Distinctive Image Features from Scale-Invariant. Scale.
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Features Points. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Aggregating Descriptors with Local Gaussian Metrics
 Aggregating Descriptors with Local Gaussian Metrics Hideki Nakayama Grad. School of Information Science and Technology The University of Tokyo Tokyo, JAPAN nakayama@ci.i.u-tokyo.ac.jp Abstract Recently,
Aggregating Descriptors with Local Gaussian Metrics Hideki Nakayama Grad. School of Information Science and Technology The University of Tokyo Tokyo, JAPAN nakayama@ci.i.u-tokyo.ac.jp Abstract Recently,
Patch Descriptors. EE/CSE 576 Linda Shapiro
 Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch-based Object Recognition. Basic Idea
 Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Enhanced and Efficient Image Retrieval via Saliency Feature and Visual Attention
 Enhanced and Efficient Image Retrieval via Saliency Feature and Visual Attention Anand K. Hase, Baisa L. Gunjal Abstract In the real world applications such as landmark search, copy protection, fake image
Enhanced and Efficient Image Retrieval via Saliency Feature and Visual Attention Anand K. Hase, Baisa L. Gunjal Abstract In the real world applications such as landmark search, copy protection, fake image
Automatic Image Alignment (feature-based)
") Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Combining Appearance and Topology for Wide
 Combining Appearance and Topology for Wide Baseline Matching Dennis Tell and Stefan Carlsson Presented by: Josh Wills Image Point Correspondences Critical foundation for many vision applications 3-D reconstruction,
Combining Appearance and Topology for Wide Baseline Matching Dennis Tell and Stefan Carlsson Presented by: Josh Wills Image Point Correspondences Critical foundation for many vision applications 3-D reconstruction,
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Scale Invariant Feature Transform
 Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Wikipedia - Mysid
 Wikipedia - Mysid Erik Brynjolfsson, MIT Filtering Edges Corners Feature points Also called interest points, key points, etc. Often described as local features. Szeliski 4.1 Slides from Rick Szeliski,
Wikipedia - Mysid Erik Brynjolfsson, MIT Filtering Edges Corners Feature points Also called interest points, key points, etc. Often described as local features. Szeliski 4.1 Slides from Rick Szeliski,
Comparison of Local Feature Descriptors
 Department of EECS, University of California, Berkeley. December 13, 26 1 Local Features 2 Mikolajczyk s Dataset Caltech 11 Dataset 3 Evaluation of Feature Detectors Evaluation of Feature Deriptors 4 Applications
Department of EECS, University of California, Berkeley. December 13, 26 1 Local Features 2 Mikolajczyk s Dataset Caltech 11 Dataset 3 Evaluation of Feature Detectors Evaluation of Feature Deriptors 4 Applications
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Sparse Models in Image Understanding And Computer Vision
 Sparse Models in Image Understanding And Computer Vision Jayaraman J. Thiagarajan Arizona State University Collaborators Prof. Andreas Spanias Karthikeyan Natesan Ramamurthy Sparsity Sparsity of a vector
Sparse Models in Image Understanding And Computer Vision Jayaraman J. Thiagarajan Arizona State University Collaborators Prof. Andreas Spanias Karthikeyan Natesan Ramamurthy Sparsity Sparsity of a vector
Multi-view 3D reconstruction. Problem formulation Projective ambiguity Rectification Autocalibration Feature points and their matching
 Multi-view 3D reconstruction Problem formulation Projective ambiguity Rectification Autocalibration Feature points and their matching Problem Given m images of n scene points captured from different viewpoints,
Multi-view 3D reconstruction Problem formulation Projective ambiguity Rectification Autocalibration Feature points and their matching Problem Given m images of n scene points captured from different viewpoints,
Sparse coding for image classification
 Sparse coding for image classification Columbia University Electrical Engineering: Kun Rong(kr2496@columbia.edu) Yongzhou Xiang(yx2211@columbia.edu) Yin Cui(yc2776@columbia.edu) Outline Background Introduction
Sparse coding for image classification Columbia University Electrical Engineering: Kun Rong(kr2496@columbia.edu) Yongzhou Xiang(yx2211@columbia.edu) Yin Cui(yc2776@columbia.edu) Outline Background Introduction
Discriminative classifiers for image recognition
 Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Efficient Kernels for Identifying Unbounded-Order Spatial Features
 Efficient Kernels for Identifying Unbounded-Order Spatial Features Yimeng Zhang Carnegie Mellon University yimengz@andrew.cmu.edu Tsuhan Chen Cornell University tsuhan@ece.cornell.edu Abstract Higher order
Efficient Kernels for Identifying Unbounded-Order Spatial Features Yimeng Zhang Carnegie Mellon University yimengz@andrew.cmu.edu Tsuhan Chen Cornell University tsuhan@ece.cornell.edu Abstract Higher order
Classifying Images with Visual/Textual Cues. By Steven Kappes and Yan Cao
 Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
Object Classification Problem
 HIERARCHICAL OBJECT CATEGORIZATION" Gregory Griffin and Pietro Perona. Learning and Using Taxonomies For Fast Visual Categorization. CVPR 2008 Marcin Marszalek and Cordelia Schmid. Constructing Category
HIERARCHICAL OBJECT CATEGORIZATION" Gregory Griffin and Pietro Perona. Learning and Using Taxonomies For Fast Visual Categorization. CVPR 2008 Marcin Marszalek and Cordelia Schmid. Constructing Category
Yudistira Pictures; Universitas Brawijaya
 Evaluation of Feature Detector-Descriptor for Real Object Matching under Various Conditions of Ilumination and Affine Transformation Novanto Yudistira1, Achmad Ridok2, Moch Ali Fauzi3 1) Yudistira Pictures;
Evaluation of Feature Detector-Descriptor for Real Object Matching under Various Conditions of Ilumination and Affine Transformation Novanto Yudistira1, Achmad Ridok2, Moch Ali Fauzi3 1) Yudistira Pictures;
Lecture 10 Detectors and descriptors
 Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of detectors SIFT Shape context Silvio Savarese Lecture 10-26-Feb-14 From the 3D to 2D & vice versa P =
Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of detectors SIFT Shape context Silvio Savarese Lecture 10-26-Feb-14 From the 3D to 2D & vice versa P =
Patch Descriptors. CSE 455 Linda Shapiro
 Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Feature Based Registration - Image Alignment
 Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Motion illusion, rotating snakes
 Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
NTHU Rain Removal Project
 People NTHU Rain Removal Project Networked Video Lab, National Tsing Hua University, Hsinchu, Taiwan Li-Wei Kang, Institute of Information Science, Academia Sinica, Taipei, Taiwan Chia-Wen Lin *, Department
People NTHU Rain Removal Project Networked Video Lab, National Tsing Hua University, Hsinchu, Taiwan Li-Wei Kang, Institute of Information Science, Academia Sinica, Taipei, Taiwan Chia-Wen Lin *, Department
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Evaluation of Local Space-time Descriptors based on Cuboid Detector in Human Action Recognition
 International Journal of Innovation and Applied Studies ISSN 2028-9324 Vol. 9 No. 4 Dec. 2014, pp. 1708-1717 2014 Innovative Space of Scientific Research Journals http://www.ijias.issr-journals.org/ Evaluation
International Journal of Innovation and Applied Studies ISSN 2028-9324 Vol. 9 No. 4 Dec. 2014, pp. 1708-1717 2014 Innovative Space of Scientific Research Journals http://www.ijias.issr-journals.org/ Evaluation
SCALE INVARIANT FEATURE TRANSFORM (SIFT)
") 1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
Lecture: RANSAC and feature detectors
 Lecture: RANSAC and feature detectors Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab 1 What we will learn today? A model fitting method for edge detection RANSAC Local invariant
Lecture: RANSAC and feature detectors Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab 1 What we will learn today? A model fitting method for edge detection RANSAC Local invariant
Multiple-Choice Questionnaire Group C
 Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
Comparing Local Feature Descriptors in plsa-based Image Models
 Comparing Local Feature Descriptors in plsa-based Image Models Eva Hörster 1,ThomasGreif 1, Rainer Lienhart 1, and Malcolm Slaney 2 1 Multimedia Computing Lab, University of Augsburg, Germany {hoerster,lienhart}@informatik.uni-augsburg.de
Comparing Local Feature Descriptors in plsa-based Image Models Eva Hörster 1,ThomasGreif 1, Rainer Lienhart 1, and Malcolm Slaney 2 1 Multimedia Computing Lab, University of Augsburg, Germany {hoerster,lienhart}@informatik.uni-augsburg.de
Specular 3D Object Tracking by View Generative Learning
 Specular 3D Object Tracking by View Generative Learning Yukiko Shinozuka, Francois de Sorbier and Hideo Saito Keio University 3-14-1 Hiyoshi, Kohoku-ku 223-8522 Yokohama, Japan shinozuka@hvrl.ics.keio.ac.jp
Specular 3D Object Tracking by View Generative Learning Yukiko Shinozuka, Francois de Sorbier and Hideo Saito Keio University 3-14-1 Hiyoshi, Kohoku-ku 223-8522 Yokohama, Japan shinozuka@hvrl.ics.keio.ac.jp
UNSUPERVISED OBJECT MATCHING AND CATEGORIZATION VIA AGGLOMERATIVE CORRESPONDENCE CLUSTERING
 UNSUPERVISED OBJECT MATCHING AND CATEGORIZATION VIA AGGLOMERATIVE CORRESPONDENCE CLUSTERING Md. Shafayat Hossain, Ahmedullah Aziz and Mohammad Wahidur Rahman Department of Electrical and Electronic Engineering,
UNSUPERVISED OBJECT MATCHING AND CATEGORIZATION VIA AGGLOMERATIVE CORRESPONDENCE CLUSTERING Md. Shafayat Hossain, Ahmedullah Aziz and Mohammad Wahidur Rahman Department of Electrical and Electronic Engineering,
Supplementary Material for Ensemble Diffusion for Retrieval
 Supplementary Material for Ensemble Diffusion for Retrieval Song Bai 1, Zhichao Zhou 1, Jingdong Wang, Xiang Bai 1, Longin Jan Latecki 3, Qi Tian 4 1 Huazhong University of Science and Technology, Microsoft
Supplementary Material for Ensemble Diffusion for Retrieval Song Bai 1, Zhichao Zhou 1, Jingdong Wang, Xiang Bai 1, Longin Jan Latecki 3, Qi Tian 4 1 Huazhong University of Science and Technology, Microsoft
Multi-modal Registration of Visual Data. Massimiliano Corsini Visual Computing Lab, ISTI - CNR - Italy
 Multi-modal Registration of Visual Data Massimiliano Corsini Visual Computing Lab, ISTI - CNR - Italy Overview Introduction and Background Features Detection and Description (2D case) Features Detection
Multi-modal Registration of Visual Data Massimiliano Corsini Visual Computing Lab, ISTI - CNR - Italy Overview Introduction and Background Features Detection and Description (2D case) Features Detection
Image Features: Local Descriptors. Sanja Fidler CSC420: Intro to Image Understanding 1/ 58
 Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
ImageCLEF 2011
 SZTAKI @ ImageCLEF 2011 Bálint Daróczy joint work with András Benczúr, Róbert Pethes Data Mining and Web Search Group Computer and Automation Research Institute Hungarian Academy of Sciences Training/test
SZTAKI @ ImageCLEF 2011 Bálint Daróczy joint work with András Benczúr, Róbert Pethes Data Mining and Web Search Group Computer and Automation Research Institute Hungarian Academy of Sciences Training/test
Describable Visual Attributes for Face Verification and Image Search
 Advanced Topics in Multimedia Analysis and Indexing, Spring 2011, NTU. 1 Describable Visual Attributes for Face Verification and Image Search Kumar, Berg, Belhumeur, Nayar. PAMI, 2011. Ryan Lei 2011/05/05
Advanced Topics in Multimedia Analysis and Indexing, Spring 2011, NTU. 1 Describable Visual Attributes for Face Verification and Image Search Kumar, Berg, Belhumeur, Nayar. PAMI, 2011. Ryan Lei 2011/05/05
Joint Inference in Image Databases via Dense Correspondence. Michael Rubinstein MIT CSAIL (while interning at Microsoft Research)
") Joint Inference in Image Databases via Dense Correspondence Michael Rubinstein MIT CSAIL (while interning at Microsoft Research) My work Throughout the year (and my PhD thesis): Temporal Video Analysis
Joint Inference in Image Databases via Dense Correspondence Michael Rubinstein MIT CSAIL (while interning at Microsoft Research) My work Throughout the year (and my PhD thesis): Temporal Video Analysis
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction
 Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 4: Harris corner detection Szeliski: 4.1 Reading Announcements Project 1 (Hybrid Images) code due next Wednesday, Feb 14, by 11:59pm Artifacts due Friday, Feb
CS5670: Computer Vision Noah Snavely Lecture 4: Harris corner detection Szeliski: 4.1 Reading Announcements Project 1 (Hybrid Images) code due next Wednesday, Feb 14, by 11:59pm Artifacts due Friday, Feb
Panoramic Image Stitching
 Mcgill University Panoramic Image Stitching by Kai Wang Pengbo Li A report submitted in fulfillment for the COMP 558 Final project in the Faculty of Computer Science April 2013 Mcgill University Abstract
Mcgill University Panoramic Image Stitching by Kai Wang Pengbo Li A report submitted in fulfillment for the COMP 558 Final project in the Faculty of Computer Science April 2013 Mcgill University Abstract
Bag-of-features. Cordelia Schmid
 Bag-of-features for category classification Cordelia Schmid Visual search Particular objects and scenes, large databases Category recognition Image classification: assigning a class label to the image
Bag-of-features for category classification Cordelia Schmid Visual search Particular objects and scenes, large databases Category recognition Image classification: assigning a class label to the image
An Associate-Predict Model for Face Recognition FIPA Seminar WS 2011/2012
 An Associate-Predict Model for Face Recognition FIPA Seminar WS 2011/2012, 19.01.2012 INSTITUTE FOR ANTHROPOMATICS, FACIAL IMAGE PROCESSING AND ANALYSIS YIG University of the State of Baden-Wuerttemberg
An Associate-Predict Model for Face Recognition FIPA Seminar WS 2011/2012, 19.01.2012 INSTITUTE FOR ANTHROPOMATICS, FACIAL IMAGE PROCESSING AND ANALYSIS YIG University of the State of Baden-Wuerttemberg
Maximally Stable Extremal Regions and Local Geometry for Visual Correspondences
 Maximally Stable Extremal Regions and Local Geometry for Visual Correspondences Michal Perďoch Supervisor: Jiří Matas Center for Machine Perception, Department of Cb Cybernetics Faculty of Electrical Engineering
Maximally Stable Extremal Regions and Local Geometry for Visual Correspondences Michal Perďoch Supervisor: Jiří Matas Center for Machine Perception, Department of Cb Cybernetics Faculty of Electrical Engineering
Instance-level recognition part 2
 Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Urban Scene Segmentation, Recognition and Remodeling. Part III. Jinglu Wang 11/24/2016 ACCV 2016 TUTORIAL
 Part III Jinglu Wang Urban Scene Segmentation, Recognition and Remodeling 102 Outline Introduction Related work Approaches Conclusion and future work o o - - ) 11/7/16 103 Introduction Motivation Motivation
Part III Jinglu Wang Urban Scene Segmentation, Recognition and Remodeling 102 Outline Introduction Related work Approaches Conclusion and future work o o - - ) 11/7/16 103 Introduction Motivation Motivation
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
AK Computer Vision Feature Point Detectors and Descriptors
 AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
Fuzzy based Multiple Dictionary Bag of Words for Image Classification
 Available online at www.sciencedirect.com Procedia Engineering 38 (2012 ) 2196 2206 International Conference on Modeling Optimisation and Computing Fuzzy based Multiple Dictionary Bag of Words for Image
Available online at www.sciencedirect.com Procedia Engineering 38 (2012 ) 2196 2206 International Conference on Modeling Optimisation and Computing Fuzzy based Multiple Dictionary Bag of Words for Image
K-Means Based Matching Algorithm for Multi-Resolution Feature Descriptors
 K-Means Based Matching Algorithm for Multi-Resolution Feature Descriptors Shao-Tzu Huang, Chen-Chien Hsu, Wei-Yen Wang International Science Index, Electrical and Computer Engineering waset.org/publication/0007607
K-Means Based Matching Algorithm for Multi-Resolution Feature Descriptors Shao-Tzu Huang, Chen-Chien Hsu, Wei-Yen Wang International Science Index, Electrical and Computer Engineering waset.org/publication/0007607
Improving Shape retrieval by Spectral Matching and Meta Similarity
 1 / 21 Improving Shape retrieval by Spectral Matching and Meta Similarity Amir Egozi (BGU), Yosi Keller (BIU) and Hugo Guterman (BGU) Department of Electrical and Computer Engineering, Ben-Gurion University
1 / 21 Improving Shape retrieval by Spectral Matching and Meta Similarity Amir Egozi (BGU), Yosi Keller (BIU) and Hugo Guterman (BGU) Department of Electrical and Computer Engineering, Ben-Gurion University
A Novel Algorithm for Color Image matching using Wavelet-SIFT
 International Journal of Scientific and Research Publications, Volume 5, Issue 1, January 2015 1 A Novel Algorithm for Color Image matching using Wavelet-SIFT Mupuri Prasanth Babu *, P. Ravi Shankar **
International Journal of Scientific and Research Publications, Volume 5, Issue 1, January 2015 1 A Novel Algorithm for Color Image matching using Wavelet-SIFT Mupuri Prasanth Babu *, P. Ravi Shankar **