Bag-of-features. Cordelia Schmid
|
|
|
- Marcus Turner
- 5 years ago
- Views:
Transcription
1 Bag-of-features for category classification Cordelia Schmid









2 Visual search Particular objects and scenes, large databases
3 Category recognition Image classification: assigning a class label to the image Car: present Cow: present Bike: not present Horse: not present

4 Category Tasks recognition Image classification: assigning a class label to the image Car: present Cow: present Bike: not present Horse: not present Object localization: define the location and the category Car Cow Location Category
5 Difficulties: within object variations Variability: Camera position, Illumination,Internal parameters Within-object variations






6 Difficulties: within-class variations



7 Given Image classification Positive training images containing an object class Negative training images that don t Classify A test image as to whether it contains the object class or not?


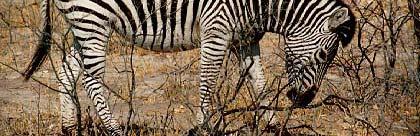
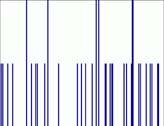
8 Bag-of-features features for image classification Origin: texture recognition Texture is characterized by the repetition of basic elements or textons Julesz, 1981; Cula & Dana, 2001; Leung & Malik 2001; Mori, Belongie & Malik, 2001; Schmid 2001; Varma & Zisserman, 2002, 2003; Lazebnik, Schmid & Ponce, 2003




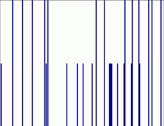
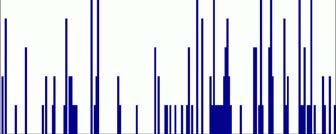
9 Texture recognition histogram Universal texton dictionary Julesz, 1981; Cula & Dana, 2001; Leung & Malik 2001; Mori, Belongie & Malik, 2001; Schmid 2001; Varma & Zisserman, 2002, 2003; Lazebnik, Schmid & Ponce, 2003
10 Bag-of-features features for image classification Origin: bag-of-words Orderless document representation: frequencies of words from a dictionary Classification to determine document categories
11 Bag-of-features features for image classification SVM Extract regions Compute Find clusters Compute distance Classification descriptors and frequencies matrix [Nowak,Jurie&Triggs,ECCV 06], [Zhang,Marszalek,Lazebnik&Schmid,IJCV 07]
12 Bag-of-features features for image classification SVM Extract regions Compute Find clusters Compute distance Classification descriptors and frequencies matrix Step 1 Step 2 Step 3 [Nowak,Jurie&Triggs,ECCV 06], [Zhang,Marszalek,Lazebnik&Schmid,IJCV 07]
13 Step 1: feature extraction Scale-invariant image regions + SIFT (see lecture 2) Affine invariant regions give too much invariance Rotation invariance for many realistic collections too much invariance Dense descriptors Improve results in the context of categories (for most categories) Interest t points do not necessarily capture all features Color-based descriptors Shape-based descriptors
14 Dense features - Multi-scale dense grid: extraction of small overlapping patches at multiple scales -Computation of the SIFT descriptor for each grid cells -Exp.: Horizontal/vertical step size 6 pixel, scaling factor of 1.2 per level
15 Bag-of-features features for image classification SVM Extract regions Compute Find clusters Compute distance Classification descriptors and frequencies matrix Step 1 Step 2 Step 3
16 Step 2: Quantization
17 Step 2:Quantization Clustering
18 Step 2: Quantization Visual vocabulary Clustering



19 Airplanes Motorbikes Faces Wild Cats Leaves People Bikes Examples for visual words
20 Step 2: Quantization Cluster descriptors K-means Gaussian mixture model Assign each visual word to a cluster Hard or soft assignment Build frequency histogram
21 K-means clustering Minimizing sum of squared Euclidean distances between points x i and their nearest cluster centers Algorithm: Randomly initialize K cluster centers Iterate until convergence: Assign each data point to the nearest center Recompute each cluster center as the mean of all points assigned to it Local minimum, solution dependent on initialization Initialization important, run several times, select best
22 Gaussian mixture model (GMM) Mixture of Gaussians: weighted sum of Gaussians where ee
23 Hard or soft assignment K-means hard assignment Assign to the closest cluster center Count number of descriptors assigned to a center Gaussian mixture model soft assignment Estimate distance to all centers Sum over number of descriptors Represent image by a frequency histogram
24 Image representation fr requenc cy.. codewords Each image is represented by a vector, typically dimension, normalization with L1 norm fine grained represent model instances coarse grained represent object categories
25 Bag-of-features features for image classification SVM Extract regions Compute Find clusters Compute distance Classification descriptors and frequencies matrix Step 1 Step 2 Step 3





26 Step 3: Classification Learn a decision rule (classifier) assigning bag-of- features representations of images to different classes Decision boundary Zebra Non-zebra




27 Training data Vectors are histograms, one from each training image positive negative Train classifier,e.g.svm
28 Linear classifiers Find linear function (hyperplane) to separate positive and negative examples x x i i positive : negative : x x i i w w + b + b < 0 0 Which hyperplane is best?
29 Linear classifiers - margin x 2 (color) Generalization is not good in this case: x1(roundness) 1 Better if a margin is introduced: b/ w x 2 (color) x1(roundness) 1
30 Nonlinear SVMs Datasets that are linearly separable work out great: 0 x But what if the dataset is just too hard? 0 x We can map it to a higher-dimensional space: x 2 0 x
31 Nonlinear SVMs General idea: the original input space can always be mapped to some higher-dimensional feature space where the training set is separable: Φ: x φ(x) Slide credit: Andrew Moore
32 Nonlinear SVMs The kernel trick: instead of explicitly computing the lifting transformation φ(x), define a kernel function K such that K(x i,x j j) = φ(x i ) φ(x j ) This gives a nonlinear decision boundary in the original feature e space: αi yik ( xi, x ) + i b
33 Kernels for bags of features Histogram intersection kernel: N I 2 i= 1 ( h = 1, h2 ) min( h1 ( i), h ( i)) Generalized Gaussian kernel: 1 K( h, h2 ) exp D( h1, h A = 2 1 2) D can be Euclidean distance, χ 2 distance, Earth Mover s Distance, etc. D ( h h = 1, 2) ( h ( i) h ( i ) N 1 2 ) i= 1 h1 ( i) + h2 ( i ) 2
34 Earth Mover s Distance Each image is represented by a signature S consisting of a set of centers {m i } and weights {w i } Centers can be codewords from universal vocabulary, clusters of features in the image, or individual features (in which case quantization is not required) Earth Mover s Distance has the form EMD( S 1, S 2 ) = i, j f ij d ( m 1 i, m 2 j ) where the flows f ij are given by the solution of a transportation problem f ij
35 Combining features SVM with multi-channel chi-square kernel Channel c is a combination of detector, descriptor D H, H ) is the chi-square distance between histograms c( i j D c 1 m 2 ( H1, H 2) = [( h + i h i h i h 1 2 ) ( 1 2i )] 2 i= 1 A c is the mean value of the distances between all training sample Extension: learning of the weights, for example with Multiple Kernel Learning (MKL) J. Zhang, M. Marszalek, S. Lazebnik and C. Schmid. Local features and kernels for classification of texture and object categories: a comprehensive study, IJCV 2007.
36 Multi-class SVMs Various direct formulations exist, but they are not widely used in practice. It is more common to obtain multi-class SVMs by combining two-class SVMs in various ways. One versus all: Training: learn an SVM for each class versus the others Testing: apply each SVM to test example and assign to it the class of the SVM that returns the highest decision value One versus one: Training: learn an SVM for each pair of classes Testing: each learned SVM votes for a class to assign to the test example
37 Why does SVM learning work? Learns foreground and background visual words foreground words high weight background words low weight
38 Illustration Localization according to visual word probability foreground word more probable background word more probable


39 Illustration A linear SVM trained from positive and negative window descriptors A few of the highest weighed descriptor vector dimensions (= 'PAS + tile') + lie on object boundary (= local shape structures common to many training exemplars)









40 Bag-of-features features for image classification Excellent results in the presence of background clutter bikes books building cars people phones trees







41 Examples for misclassified images Books- misclassified into faces, faces, buildings Buildings- misclassified into faces, trees, trees Cars- misclassified into buildings, phones, phones
42 Bag of visual words summary Advantages: largely unaffected by position and orientation of object in image fixed length vector irrespective of number of detections very successful in classifying images according to the objects they contain Disadvantages: no explicit use of configuration of visual word positions poor at localizing objects within an image
43 Evaluation of image classification PASCAL VOC [05-10] datasets PASCAL VOC 2007 Training and test dataset available Used to report state-of-the-art the art results Collected January 2007 from Flickr images downloaded and random subset selected 20 classes Class labels per image + bounding boxes 5011 training i images, 4952 test t images Evaluation measure: average precision
44 PASCAL 2007 dataset
45 PASCAL 2007 dataset
46 Evaluation
47 Results for PASCAL 2007 Winner of PASCAL 2007 [Marszalek et al.] : map 59.4 Combination of several different channels (dense + interest points, SIFT + color descriptors, spatial grids) Non-linear SVM with Gaussian kernel Multiple kernel learning [Yang et al. 2009] : map 62.2 Combination of several features Group-based MKL approach Combining object localization and classification [Harzallah et al. 09] : map 63.5 Use detection results to improve classification
48 Comparison interest point - dense Image classification results on PASCAL 07 train/val set AP (SHarris + Lap) x SIFT MSDense x SIFT (SHarris + Lap + MSDense) x SIFT Method: bag-of-features + SVM classifier
49 Comparison interest point - dense Image classification results on PASCAL 07 train/val set AP (SHarris + Lap) x SIFT MSDense x SIFT (SHarris + Lap + MSDense) x SIFT Dense is on average a bit better! IP and dense are complementary, combination improves results.
50 Comparison interest point - dense Image classification results on PASCAL 07 train/val set for individual categories (SHarris + Lap) x SIFT MSDense x SIFT Bicycle PottedPlant Bird Boat Results are category dependent!
51 Evaluation BoF spatial Image classification results on PASCAL 07 train/val set (SH, Lap, MSD) x (SIFT,SIFTC) AP spatial layout x x ,2x2,3x Spatial layout not dominant for PASCAL 07 dataset Combination i improves average results, i.e., it is appropriate for some classes
52 Evaluation BoF - spatial Image classification results on PASCAL 07 train/val set for individual categories 1 3x1 Sheep Bird DiningTable Train Results are category dependent! Combination helps somewhat


53 Spatial pyramid matching Add spatial information to the bag-of-features features Perform matching in 2D image space [Lazebnik, Schmid & Ponce, CVPR 2006]



![Picard, 1997]](/docs-images/81/83787452/images/54-5.jpg "SIFT [Lowe,")
![1999] GIST](/docs-images/81/83787452/images/54-6.jpg "[Torralba et al.")
![, 2003] SIFT](/docs-images/81/83787452/images/54-8.jpg "Gist Szummer &")
54 Related work Similar approaches: Subblock description [Szummer & Picard, 1997] SIFT [Lowe, 1999] GIST [Torralba et al., 2003] SIFT Gist Szummer & Picard (1997) Lowe (1999, 2004) Torralba et al. (2003)
55 Spatial pyramid representation Locally orderless representation at several levels of spatial resolution level 0
56 Spatial pyramid representation Locally orderless representation at several levels of spatial resolution level 0 level 1


57 Spatial pyramid representation Locally orderless representation at several levels of spatial resolution level 0 level 1 level 2





58 Pyramid ya match kernel e Weighted sum of histogram intersections at multiple resolutions (linear in the number of features instead of cubic) optimal partial matching between sets of features
59 Spatial pyramid matching Combination of spatial levels with pyramid match kernel [Grauman & Darell 05] Intersect histograms, more weight to finer grids


![06] Coast](/docs-images/81/83787452/images/60-2.jpg "Forest")





















60 Scene dataset [Labzenik et al. 06] Coast Forest Mountain Open country Highway Inside city Tall building Street Suburb Bedroom Kitchen Living room Office Store Industrial 4385 images 15categories es
61 Scene classification L Single-level level Pyramid 0(1x1) 72.2±0.6 1(2x2) 77.9± ±0.5 2(4x4) 79.4± ±0.3 3(8x8) 77.2± ±0.3
62 Retrieval examples














63 Category classification CalTech101 L Single-level Pyramid 0(1x1) 41.2±1.2 1(2x2) 55.9± ±0.8 2(4x4) 63.6± ±0.8 3(8x8) 60.3± ±0.7 Bag-of-features approach by Zhang et al. 07: 54 %
64 CalTech101 Easiest and hardest classes Sources of difficulty: Lack of texture Camouflage Thin, articulated limbs Highly deformable shape
65 Discussion Summary Spatial pyramid representation: appearance of local image patches + coarse global l position information Substantial improvement over bag of features Depends on the similarity of image layout Extensions Flexible, object-centered grid
66 Motivation Evaluating the influence of background features [J. Zhang et al., IJCV 07] Train and test on different combinations of foreground and background by separating features based on bounding boxes Training: original training set Testing: different combinations foreground + background features Best results when testing with foreground features only


![06] weight features by the likelihood of](/docs-images/81/83787452/images/67-2.jpg "belonging to the object determine likelihood")
67 Approach Better to train on a harder dataset with background clutter and test on an easier one without background clutter Spatial weighting for bag-of-features [Marszalek & Schmid, CVPR 06] weight features by the likelihood of belonging to the object determine likelihood based on shape masks
 - Align mask based on local co-ordinates ordinates system")

68 Masks for spatial weighting For each test feature: - Select closest training features + corresponding masks (training requires segmented images or bounding boxes) - Align mask based on local co-ordinates ordinates system (transformation between training and test co-ordinate systems) Sum masks weighted by matching distance three features agree on object localization, the object has higher weights Weight histogram features with the strength of the final mask









69 Example masks for spatial weighting
70 Classification for PASCAL dataset Zhang et al. Spatial weighting Gain bikes cars motorbikes people Equal error rates for PASCAL test set 2
71 Extension to localization Cast hypothesis Aligning the mask based on matching features Evaluate each hypothesis SVM for local features Merge hypothesis to produce localization decisions Online clustering of similar hypothesis, rejection of weak ones [Marszalek & Schmid, CVPR 2007]








72 Localization results
73 Discussion Including spatial information improves results Importance of flexible modeling of spatial information coarse global position information object based models
74 Recent extensions Linear Spatial Pyramid Matching Using Sparse Coding for Image Classification. J. Yang et al., CVPR 09. Local coordinate coding, linear SVM, excellent results in last year s PASCAL challenge Learning Mid-level features for recognition, Y. Boureau et al., CVPR 10. Use of sparse coding techniques and max pooling
75 Recent extensions Efficient Additive Kernels via Explicit Feature Maps, A. Vedaldi and Zisserman, CVPR approximation by linear kernels Improving the Fisher Kernel for Large-Scale Image Classification, Perronnin et al., ECCV 10 More discriminative descriptor, power normalization, linear SVM
Introduction to object recognition. Slides adapted from Fei-Fei Li, Rob Fergus, Antonio Torralba, and others
 Introduction to object recognition Slides adapted from Fei-Fei Li, Rob Fergus, Antonio Torralba, and others Overview Basic recognition tasks A statistical learning approach Traditional or shallow recognition
Introduction to object recognition Slides adapted from Fei-Fei Li, Rob Fergus, Antonio Torralba, and others Overview Basic recognition tasks A statistical learning approach Traditional or shallow recognition
Bag of Words or Bag of Features. Lecture-16 (Slides Credit: Cordelia Schmid LEAR INRIA Grenoble)
") Bag of Words or Bag of Features Lecture-16 (Slides Credit: Cordelia Schmid LEAR INRIA Grenoble) Contents Interest Point Detector Interest Point Descriptor K-means clustering Support Vector Machine (SVM)
Bag of Words or Bag of Features Lecture-16 (Slides Credit: Cordelia Schmid LEAR INRIA Grenoble) Contents Interest Point Detector Interest Point Descriptor K-means clustering Support Vector Machine (SVM)
Local Features and Bag of Words Models
 10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
Discriminative classifiers for image recognition
 Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Supervised learning. y = f(x) function
 function") Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 16: Bag-of-words models Object Bag of words Announcements Project 3: Eigenfaces due Wednesday, November 11 at 11:59pm solo project Final project presentations:
CS6670: Computer Vision Noah Snavely Lecture 16: Bag-of-words models Object Bag of words Announcements Project 3: Eigenfaces due Wednesday, November 11 at 11:59pm solo project Final project presentations:
Bag of Words Models. CS4670 / 5670: Computer Vision Noah Snavely. Bag-of-words models 11/26/2013
 CS4670 / 5670: Computer Vision Noah Snavely Bag-of-words models Object Bag of words Bag of Words Models Adapted from slides by Rob Fergus and Svetlana Lazebnik 1 Object Bag of words Origin 1: Texture Recognition
CS4670 / 5670: Computer Vision Noah Snavely Bag-of-words models Object Bag of words Bag of Words Models Adapted from slides by Rob Fergus and Svetlana Lazebnik 1 Object Bag of words Origin 1: Texture Recognition
Learning Representations for Visual Object Class Recognition
 Learning Representations for Visual Object Class Recognition Marcin Marszałek Cordelia Schmid Hedi Harzallah Joost van de Weijer LEAR, INRIA Grenoble, Rhône-Alpes, France October 15th, 2007 Bag-of-Features
Learning Representations for Visual Object Class Recognition Marcin Marszałek Cordelia Schmid Hedi Harzallah Joost van de Weijer LEAR, INRIA Grenoble, Rhône-Alpes, France October 15th, 2007 Bag-of-Features
Beyond Bags of Features
 : for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
: for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
Part-based and local feature models for generic object recognition
 Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Object Classification Problem
 HIERARCHICAL OBJECT CATEGORIZATION" Gregory Griffin and Pietro Perona. Learning and Using Taxonomies For Fast Visual Categorization. CVPR 2008 Marcin Marszalek and Cordelia Schmid. Constructing Category
HIERARCHICAL OBJECT CATEGORIZATION" Gregory Griffin and Pietro Perona. Learning and Using Taxonomies For Fast Visual Categorization. CVPR 2008 Marcin Marszalek and Cordelia Schmid. Constructing Category
Previously. Part-based and local feature models for generic object recognition. Bag-of-words model 4/20/2011
 Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Local Features and Kernels for Classifcation of Texture and Object Categories: A Comprehensive Study
 Local Features and Kernels for Classifcation of Texture and Object Categories: A Comprehensive Study J. Zhang 1 M. Marszałek 1 S. Lazebnik 2 C. Schmid 1 1 INRIA Rhône-Alpes, LEAR - GRAVIR Montbonnot, France
Local Features and Kernels for Classifcation of Texture and Object Categories: A Comprehensive Study J. Zhang 1 M. Marszałek 1 S. Lazebnik 2 C. Schmid 1 1 INRIA Rhône-Alpes, LEAR - GRAVIR Montbonnot, France
Patch Descriptors. CSE 455 Linda Shapiro
 Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Visual words. Map high-dimensional descriptors to tokens/words by quantizing the feature space.
 Visual words Map high-dimensional descriptors to tokens/words by quantizing the feature space. Quantize via clustering; cluster centers are the visual words Word #2 Descriptor feature space Assign word
Visual words Map high-dimensional descriptors to tokens/words by quantizing the feature space. Quantize via clustering; cluster centers are the visual words Word #2 Descriptor feature space Assign word
Category-level localization
 Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Part based models for recognition. Kristen Grauman
 Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Classifying Images with Visual/Textual Cues. By Steven Kappes and Yan Cao
 Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
By Suren Manvelyan,
 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan,
By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan,
Preliminary Local Feature Selection by Support Vector Machine for Bag of Features
 Preliminary Local Feature Selection by Support Vector Machine for Bag of Features Tetsu Matsukawa Koji Suzuki Takio Kurita :University of Tsukuba :National Institute of Advanced Industrial Science and
Preliminary Local Feature Selection by Support Vector Machine for Bag of Features Tetsu Matsukawa Koji Suzuki Takio Kurita :University of Tsukuba :National Institute of Advanced Industrial Science and
Announcements. Recognition. Recognition. Recognition. Recognition. Homework 3 is due May 18, 11:59 PM Reading: Computer Vision I CSE 152 Lecture 14
 Announcements Computer Vision I CSE 152 Lecture 14 Homework 3 is due May 18, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images Given
Announcements Computer Vision I CSE 152 Lecture 14 Homework 3 is due May 18, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images Given
Learning Object Representations for Visual Object Class Recognition
 Learning Object Representations for Visual Object Class Recognition Marcin Marszalek, Cordelia Schmid, Hedi Harzallah, Joost Van de Weijer To cite this version: Marcin Marszalek, Cordelia Schmid, Hedi
Learning Object Representations for Visual Object Class Recognition Marcin Marszalek, Cordelia Schmid, Hedi Harzallah, Joost Van de Weijer To cite this version: Marcin Marszalek, Cordelia Schmid, Hedi
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Object Recognition. Computer Vision. Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce
 Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Beyond bags of features: Adding spatial information. Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba
 Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Patch Descriptors. EE/CSE 576 Linda Shapiro
 Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Supervised learning. y = f(x) function
 function") Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
CLASSIFICATION Experiments
 CLASSIFICATION Experiments January 27,2015 CS3710: Visual Recognition Bhavin Modi Bag of features Object Bag of words 1. Extract features 2. Learn visual vocabulary Bag of features: outline 3. Quantize
CLASSIFICATION Experiments January 27,2015 CS3710: Visual Recognition Bhavin Modi Bag of features Object Bag of words 1. Extract features 2. Learn visual vocabulary Bag of features: outline 3. Quantize
Generative and discriminative classification techniques
 Generative and discriminative classification techniques Machine Learning and Category Representation 013-014 Jakob Verbeek, December 13+0, 013 Course website: http://lear.inrialpes.fr/~verbeek/mlcr.13.14
Generative and discriminative classification techniques Machine Learning and Category Representation 013-014 Jakob Verbeek, December 13+0, 013 Course website: http://lear.inrialpes.fr/~verbeek/mlcr.13.14
Semantic Pooling for Image Categorization using Multiple Kernel Learning
 Semantic Pooling for Image Categorization using Multiple Kernel Learning Thibaut Durand (1,2), Nicolas Thome (1), Matthieu Cord (1), David Picard (2) (1) Sorbonne Universités, UPMC Univ Paris 06, UMR 7606,
Semantic Pooling for Image Categorization using Multiple Kernel Learning Thibaut Durand (1,2), Nicolas Thome (1), Matthieu Cord (1), David Picard (2) (1) Sorbonne Universités, UPMC Univ Paris 06, UMR 7606,
Analysis: TextonBoost and Semantic Texton Forests. Daniel Munoz Februrary 9, 2009
 Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Multiple-Choice Questionnaire Group C
 Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
Large-Scale Live Active Learning: Training Object Detectors with Crawled Data and Crowds
 Large-Scale Live Active Learning: Training Object Detectors with Crawled Data and Crowds Sudheendra Vijayanarasimhan Kristen Grauman Department of Computer Science University of Texas at Austin Austin,
Large-Scale Live Active Learning: Training Object Detectors with Crawled Data and Crowds Sudheendra Vijayanarasimhan Kristen Grauman Department of Computer Science University of Texas at Austin Austin,
Distribution Distance Functions
 COMP 875 November 10, 2009 Matthew O Meara Question How similar are these? Outline Motivation Protein Score Function Object Retrieval Kernel Machines 1 Motivation Protein Score Function Object Retrieval
COMP 875 November 10, 2009 Matthew O Meara Question How similar are these? Outline Motivation Protein Score Function Object Retrieval Kernel Machines 1 Motivation Protein Score Function Object Retrieval
Learning Visual Semantics: Models, Massive Computation, and Innovative Applications
 Learning Visual Semantics: Models, Massive Computation, and Innovative Applications Part II: Visual Features and Representations Liangliang Cao, IBM Watson Research Center Evolvement of Visual Features
Learning Visual Semantics: Models, Massive Computation, and Innovative Applications Part II: Visual Features and Representations Liangliang Cao, IBM Watson Research Center Evolvement of Visual Features
Sparse coding for image classification
 Sparse coding for image classification Columbia University Electrical Engineering: Kun Rong(kr2496@columbia.edu) Yongzhou Xiang(yx2211@columbia.edu) Yin Cui(yc2776@columbia.edu) Outline Background Introduction
Sparse coding for image classification Columbia University Electrical Engineering: Kun Rong(kr2496@columbia.edu) Yongzhou Xiang(yx2211@columbia.edu) Yin Cui(yc2776@columbia.edu) Outline Background Introduction
CV as making bank. Intel buys Mobileye! $15 billion. Mobileye:
 CV as making bank Intel buys Mobileye! $15 billion Mobileye: Spin-off from Hebrew University, Israel 450 engineers 15 million cars installed 313 car models June 2016 - Tesla left Mobileye Fatal crash car
CV as making bank Intel buys Mobileye! $15 billion Mobileye: Spin-off from Hebrew University, Israel 450 engineers 15 million cars installed 313 car models June 2016 - Tesla left Mobileye Fatal crash car
Recognition Tools: Support Vector Machines
 CS 2770: Computer Vision Recognition Tools: Support Vector Machines Prof. Adriana Kovashka University of Pittsburgh January 12, 2017 Announcement TA office hours: Tuesday 4pm-6pm Wednesday 10am-12pm Matlab
CS 2770: Computer Vision Recognition Tools: Support Vector Machines Prof. Adriana Kovashka University of Pittsburgh January 12, 2017 Announcement TA office hours: Tuesday 4pm-6pm Wednesday 10am-12pm Matlab
Beyond Bags of features Spatial information & Shape models
 Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Visual Object Recognition
 Perceptual and Sensory Augmented Computing Visual Object Recognition Tutorial Visual Object Recognition Bastian Leibe Computer Vision Laboratory ETH Zurich Chicago, 14.07.2008 & Kristen Grauman Department
Perceptual and Sensory Augmented Computing Visual Object Recognition Tutorial Visual Object Recognition Bastian Leibe Computer Vision Laboratory ETH Zurich Chicago, 14.07.2008 & Kristen Grauman Department
Lecture 12 Visual recognition
 Lecture 12 Visual recognition Bag of words models for object recognition and classification Discriminative methods Generative methods Silvio Savarese Lecture 11 17Feb14 Challenges Variability due to: View
Lecture 12 Visual recognition Bag of words models for object recognition and classification Discriminative methods Generative methods Silvio Savarese Lecture 11 17Feb14 Challenges Variability due to: View
Loose Shape Model for Discriminative Learning of Object Categories
 Loose Shape Model for Discriminative Learning of Object Categories Margarita Osadchy and Elran Morash Computer Science Department University of Haifa Mount Carmel, Haifa 31905, Israel rita@cs.haifa.ac.il
Loose Shape Model for Discriminative Learning of Object Categories Margarita Osadchy and Elran Morash Computer Science Department University of Haifa Mount Carmel, Haifa 31905, Israel rita@cs.haifa.ac.il
Basic Problem Addressed. The Approach I: Training. Main Idea. The Approach II: Testing. Why a set of vocabularies?
 Visual Categorization With Bags of Keypoints. ECCV,. G. Csurka, C. Bray, C. Dance, and L. Fan. Shilpa Gulati //7 Basic Problem Addressed Find a method for Generic Visual Categorization Visual Categorization:
Visual Categorization With Bags of Keypoints. ECCV,. G. Csurka, C. Bray, C. Dance, and L. Fan. Shilpa Gulati //7 Basic Problem Addressed Find a method for Generic Visual Categorization Visual Categorization:
Object recognition (part 2)
") Object recognition (part 2) CSE P 576 Larry Zitnick (larryz@microsoft.com) 1 2 3 Support Vector Machines Modified from the slides by Dr. Andrew W. Moore http://www.cs.cmu.edu/~awm/tutorials Linear Classifiers
Object recognition (part 2) CSE P 576 Larry Zitnick (larryz@microsoft.com) 1 2 3 Support Vector Machines Modified from the slides by Dr. Andrew W. Moore http://www.cs.cmu.edu/~awm/tutorials Linear Classifiers
Action recognition in videos
 Action recognition in videos Cordelia Schmid INRIA Grenoble Joint work with V. Ferrari, A. Gaidon, Z. Harchaoui, A. Klaeser, A. Prest, H. Wang Action recognition - goal Short actions, i.e. drinking, sit
Action recognition in videos Cordelia Schmid INRIA Grenoble Joint work with V. Ferrari, A. Gaidon, Z. Harchaoui, A. Klaeser, A. Prest, H. Wang Action recognition - goal Short actions, i.e. drinking, sit
EECS 442 Computer vision. Object Recognition
 EECS 442 Computer vision Object Recognition Intro Recognition of 3D objects Recognition of object categories: Bag of world models Part based models 3D object categorization Computer Vision: Algorithms
EECS 442 Computer vision Object Recognition Intro Recognition of 3D objects Recognition of object categories: Bag of world models Part based models 3D object categorization Computer Vision: Algorithms
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 19 Object Recognition II Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 19 Object Recognition II Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
String distance for automatic image classification
 String distance for automatic image classification Nguyen Hong Thinh*, Le Vu Ha*, Barat Cecile** and Ducottet Christophe** *University of Engineering and Technology, Vietnam National University of HaNoi,
String distance for automatic image classification Nguyen Hong Thinh*, Le Vu Ha*, Barat Cecile** and Ducottet Christophe** *University of Engineering and Technology, Vietnam National University of HaNoi,
TA Section: Problem Set 4
 TA Section: Problem Set 4 Outline Discriminative vs. Generative Classifiers Image representation and recognition models Bag of Words Model Part-based Model Constellation Model Pictorial Structures Model
TA Section: Problem Set 4 Outline Discriminative vs. Generative Classifiers Image representation and recognition models Bag of Words Model Part-based Model Constellation Model Pictorial Structures Model
Bias-Variance Trade-off + Other Models and Problems
 CS 1699: Intro to Computer Vision Bias-Variance Trade-off + Other Models and Problems Prof. Adriana Kovashka University of Pittsburgh November 3, 2015 Outline Support Vector Machines (review + other uses)
CS 1699: Intro to Computer Vision Bias-Variance Trade-off + Other Models and Problems Prof. Adriana Kovashka University of Pittsburgh November 3, 2015 Outline Support Vector Machines (review + other uses)
Fisher vector image representation
 Fisher vector image representation Jakob Verbeek January 13, 2012 Course website: http://lear.inrialpes.fr/~verbeek/mlcr.11.12.php Fisher vector representation Alternative to bag-of-words image representation
Fisher vector image representation Jakob Verbeek January 13, 2012 Course website: http://lear.inrialpes.fr/~verbeek/mlcr.11.12.php Fisher vector representation Alternative to bag-of-words image representation
Linear combinations of simple classifiers for the PASCAL challenge
 Linear combinations of simple classifiers for the PASCAL challenge Nik A. Melchior and David Lee 16 721 Advanced Perception The Robotics Institute Carnegie Mellon University Email: melchior@cmu.edu, dlee1@andrew.cmu.edu
Linear combinations of simple classifiers for the PASCAL challenge Nik A. Melchior and David Lee 16 721 Advanced Perception The Robotics Institute Carnegie Mellon University Email: melchior@cmu.edu, dlee1@andrew.cmu.edu
Mining Discriminative Adjectives and Prepositions for Natural Scene Recognition
 Mining Discriminative Adjectives and Prepositions for Natural Scene Recognition Bangpeng Yao 1, Juan Carlos Niebles 2,3, Li Fei-Fei 1 1 Department of Computer Science, Princeton University, NJ 08540, USA
Mining Discriminative Adjectives and Prepositions for Natural Scene Recognition Bangpeng Yao 1, Juan Carlos Niebles 2,3, Li Fei-Fei 1 1 Department of Computer Science, Princeton University, NJ 08540, USA
arxiv: v3 [cs.cv] 3 Oct 2012
![arxiv: v3 [cs.cv] 3 Oct 2012](/thumbs/96/128756091.jpg "arxiv: v3 [cs.cv] 3 Oct 2012") Combined Descriptors in Spatial Pyramid Domain for Image Classification Junlin Hu and Ping Guo arxiv:1210.0386v3 [cs.cv] 3 Oct 2012 Image Processing and Pattern Recognition Laboratory Beijing Normal University,
Combined Descriptors in Spatial Pyramid Domain for Image Classification Junlin Hu and Ping Guo arxiv:1210.0386v3 [cs.cv] 3 Oct 2012 Image Processing and Pattern Recognition Laboratory Beijing Normal University,
Detection III: Analyzing and Debugging Detection Methods
 CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
Evaluation of GIST descriptors for web scale image search
 Evaluation of GIST descriptors for web scale image search Matthijs Douze Hervé Jégou, Harsimrat Sandhawalia, Laurent Amsaleg and Cordelia Schmid INRIA Grenoble, France July 9, 2009 Evaluation of GIST for
Evaluation of GIST descriptors for web scale image search Matthijs Douze Hervé Jégou, Harsimrat Sandhawalia, Laurent Amsaleg and Cordelia Schmid INRIA Grenoble, France July 9, 2009 Evaluation of GIST for
Recognition of Animal Skin Texture Attributes in the Wild. Amey Dharwadker (aap2174) Kai Zhang (kz2213)
 Kai Zhang (kz2213)") Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
Aggregating Descriptors with Local Gaussian Metrics
 Aggregating Descriptors with Local Gaussian Metrics Hideki Nakayama Grad. School of Information Science and Technology The University of Tokyo Tokyo, JAPAN nakayama@ci.i.u-tokyo.ac.jp Abstract Recently,
Aggregating Descriptors with Local Gaussian Metrics Hideki Nakayama Grad. School of Information Science and Technology The University of Tokyo Tokyo, JAPAN nakayama@ci.i.u-tokyo.ac.jp Abstract Recently,
BossaNova at ImageCLEF 2012 Flickr Photo Annotation Task
 BossaNova at ImageCLEF 2012 Flickr Photo Annotation Task S. Avila 1,2, N. Thome 1, M. Cord 1, E. Valle 3, and A. de A. Araújo 2 1 Pierre and Marie Curie University, UPMC-Sorbonne Universities, LIP6, France
BossaNova at ImageCLEF 2012 Flickr Photo Annotation Task S. Avila 1,2, N. Thome 1, M. Cord 1, E. Valle 3, and A. de A. Araújo 2 1 Pierre and Marie Curie University, UPMC-Sorbonne Universities, LIP6, France
OBJECT CATEGORIZATION
 OBJECT CATEGORIZATION Ing. Lorenzo Seidenari e-mail: seidenari@dsi.unifi.it Slides: Ing. Lamberto Ballan November 18th, 2009 What is an Object? Merriam-Webster Definition: Something material that may be
OBJECT CATEGORIZATION Ing. Lorenzo Seidenari e-mail: seidenari@dsi.unifi.it Slides: Ing. Lamberto Ballan November 18th, 2009 What is an Object? Merriam-Webster Definition: Something material that may be
Beyond bags of Features
 Beyond bags of Features Spatial Pyramid Matching for Recognizing Natural Scene Categories Camille Schreck, Romain Vavassori Ensimag December 14, 2012 Schreck, Vavassori (Ensimag) Beyond bags of Features
Beyond bags of Features Spatial Pyramid Matching for Recognizing Natural Scene Categories Camille Schreck, Romain Vavassori Ensimag December 14, 2012 Schreck, Vavassori (Ensimag) Beyond bags of Features
Beyond Sliding Windows: Object Localization by Efficient Subwindow Search
 Beyond Sliding Windows: Object Localization by Efficient Subwindow Search Christoph H. Lampert, Matthew B. Blaschko, & Thomas Hofmann Max Planck Institute for Biological Cybernetics Tübingen, Germany Google,
Beyond Sliding Windows: Object Localization by Efficient Subwindow Search Christoph H. Lampert, Matthew B. Blaschko, & Thomas Hofmann Max Planck Institute for Biological Cybernetics Tübingen, Germany Google,
Scene Recognition using Bag-of-Words
 Scene Recognition using Bag-of-Words Sarthak Ahuja B.Tech Computer Science Indraprastha Institute of Information Technology Okhla, Delhi 110020 Email: sarthak12088@iiitd.ac.in Anchita Goel B.Tech Computer
Scene Recognition using Bag-of-Words Sarthak Ahuja B.Tech Computer Science Indraprastha Institute of Information Technology Okhla, Delhi 110020 Email: sarthak12088@iiitd.ac.in Anchita Goel B.Tech Computer
Mixtures of Gaussians and Advanced Feature Encoding
 Mixtures of Gaussians and Advanced Feature Encoding Computer Vision Ali Borji UWM Many slides from James Hayes, Derek Hoiem, Florent Perronnin, and Hervé Why do good recognition systems go bad? E.g. Why
Mixtures of Gaussians and Advanced Feature Encoding Computer Vision Ali Borji UWM Many slides from James Hayes, Derek Hoiem, Florent Perronnin, and Hervé Why do good recognition systems go bad? E.g. Why
ImageCLEF 2011
 SZTAKI @ ImageCLEF 2011 Bálint Daróczy joint work with András Benczúr, Róbert Pethes Data Mining and Web Search Group Computer and Automation Research Institute Hungarian Academy of Sciences Training/test
SZTAKI @ ImageCLEF 2011 Bálint Daróczy joint work with András Benczúr, Róbert Pethes Data Mining and Web Search Group Computer and Automation Research Institute Hungarian Academy of Sciences Training/test
ROBUST SCENE CLASSIFICATION BY GIST WITH ANGULAR RADIAL PARTITIONING. Wei Liu, Serkan Kiranyaz and Moncef Gabbouj
 Proceedings of the 5th International Symposium on Communications, Control and Signal Processing, ISCCSP 2012, Rome, Italy, 2-4 May 2012 ROBUST SCENE CLASSIFICATION BY GIST WITH ANGULAR RADIAL PARTITIONING
Proceedings of the 5th International Symposium on Communications, Control and Signal Processing, ISCCSP 2012, Rome, Italy, 2-4 May 2012 ROBUST SCENE CLASSIFICATION BY GIST WITH ANGULAR RADIAL PARTITIONING
CS 343H: Honors AI. Lecture 23: Kernels and clustering 4/15/2014. Kristen Grauman UT Austin
 CS 343H: Honors AI Lecture 23: Kernels and clustering 4/15/2014 Kristen Grauman UT Austin Slides courtesy of Dan Klein, except where otherwise noted Announcements Office hours Kim s office hours this week:
CS 343H: Honors AI Lecture 23: Kernels and clustering 4/15/2014 Kristen Grauman UT Austin Slides courtesy of Dan Klein, except where otherwise noted Announcements Office hours Kim s office hours this week:
Improved Spatial Pyramid Matching for Image Classification
 Improved Spatial Pyramid Matching for Image Classification Mohammad Shahiduzzaman, Dengsheng Zhang, and Guojun Lu Gippsland School of IT, Monash University, Australia {Shahid.Zaman,Dengsheng.Zhang,Guojun.Lu}@monash.edu
Improved Spatial Pyramid Matching for Image Classification Mohammad Shahiduzzaman, Dengsheng Zhang, and Guojun Lu Gippsland School of IT, Monash University, Australia {Shahid.Zaman,Dengsheng.Zhang,Guojun.Lu}@monash.edu
Kernels for Visual Words Histograms
 Kernels for Visual Words Histograms Radu Tudor Ionescu and Marius Popescu Faculty of Mathematics and Computer Science University of Bucharest, No. 14 Academiei Street, Bucharest, Romania {raducu.ionescu,popescunmarius}@gmail.com
Kernels for Visual Words Histograms Radu Tudor Ionescu and Marius Popescu Faculty of Mathematics and Computer Science University of Bucharest, No. 14 Academiei Street, Bucharest, Romania {raducu.ionescu,popescunmarius}@gmail.com
Local features and kernels for classification of texture and object categories: A comprehensive study
 Local features and kernels for classification of texture and object categories: A comprehensive study J. Zhang 1, M. Marsza lek 1, S. Lazebnik 2 and C. Schmid 1, 1 INRIA, GRAVIR-CNRS, 655, av. de l Europe,
Local features and kernels for classification of texture and object categories: A comprehensive study J. Zhang 1, M. Marsza lek 1, S. Lazebnik 2 and C. Schmid 1, 1 INRIA, GRAVIR-CNRS, 655, av. de l Europe,
Object Recognition in Images and Video: Advanced Bag-of-Words 27 April / 61
 Object Recognition in Images and Video: Advanced Bag-of-Words http://www.micc.unifi.it/bagdanov/obrec Prof. Andrew D. Bagdanov Dipartimento di Ingegneria dell Informazione Università degli Studi di Firenze
Object Recognition in Images and Video: Advanced Bag-of-Words http://www.micc.unifi.it/bagdanov/obrec Prof. Andrew D. Bagdanov Dipartimento di Ingegneria dell Informazione Università degli Studi di Firenze
Learning Compact Visual Attributes for Large-scale Image Classification
 Learning Compact Visual Attributes for Large-scale Image Classification Yu Su and Frédéric Jurie GREYC CNRS UMR 6072, University of Caen Basse-Normandie, Caen, France {yu.su,frederic.jurie}@unicaen.fr
Learning Compact Visual Attributes for Large-scale Image Classification Yu Su and Frédéric Jurie GREYC CNRS UMR 6072, University of Caen Basse-Normandie, Caen, France {yu.su,frederic.jurie}@unicaen.fr
Support vector machines
 Support vector machines When the data is linearly separable, which of the many possible solutions should we prefer? SVM criterion: maximize the margin, or distance between the hyperplane and the closest
Support vector machines When the data is linearly separable, which of the many possible solutions should we prefer? SVM criterion: maximize the margin, or distance between the hyperplane and the closest
Object Recognition II
 Object Recognition II Linda Shapiro EE/CSE 576 with CNN slides from Ross Girshick 1 Outline Object detection the task, evaluation, datasets Convolutional Neural Networks (CNNs) overview and history Region-based
Object Recognition II Linda Shapiro EE/CSE 576 with CNN slides from Ross Girshick 1 Outline Object detection the task, evaluation, datasets Convolutional Neural Networks (CNNs) overview and history Region-based
Category-level Localization
 Category-level Localization Andrew Zisserman Visual Geometry Group University of Oxford http://www.robots.ox.ac.uk/~vgg Includes slides from: Ondra Chum, Alyosha Efros, Mark Everingham, Pedro Felzenszwalb,
Category-level Localization Andrew Zisserman Visual Geometry Group University of Oxford http://www.robots.ox.ac.uk/~vgg Includes slides from: Ondra Chum, Alyosha Efros, Mark Everingham, Pedro Felzenszwalb,
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
SVM-KNN : Discriminative Nearest Neighbor Classification for Visual Category Recognition
 SVM-KNN : Discriminative Nearest Neighbor Classification for Visual Category Recognition Hao Zhang, Alexander Berg, Michael Maire Jitendra Malik EECS, UC Berkeley Presented by Adam Bickett Objective Visual
SVM-KNN : Discriminative Nearest Neighbor Classification for Visual Category Recognition Hao Zhang, Alexander Berg, Michael Maire Jitendra Malik EECS, UC Berkeley Presented by Adam Bickett Objective Visual
Large-scale visual recognition The bag-of-words representation
 Large-scale visual recognition The bag-of-words representation Florent Perronnin, XRCE Hervé Jégou, INRIA CVPR tutorial June 16, 2012 Outline Bag-of-words Large or small vocabularies? Extensions for instance-level
Large-scale visual recognition The bag-of-words representation Florent Perronnin, XRCE Hervé Jégou, INRIA CVPR tutorial June 16, 2012 Outline Bag-of-words Large or small vocabularies? Extensions for instance-level
Machine Learning Crash Course
 Machine Learning Crash Course Photo: CMU Machine Learning Department protests G20 Computer Vision James Hays Slides: Isabelle Guyon, Erik Sudderth, Mark Johnson, Derek Hoiem The machine learning framework
Machine Learning Crash Course Photo: CMU Machine Learning Department protests G20 Computer Vision James Hays Slides: Isabelle Guyon, Erik Sudderth, Mark Johnson, Derek Hoiem The machine learning framework
CS229: Action Recognition in Tennis
 CS229: Action Recognition in Tennis Aman Sikka Stanford University Stanford, CA 94305 Rajbir Kataria Stanford University Stanford, CA 94305 asikka@stanford.edu rkataria@stanford.edu 1. Motivation As active
CS229: Action Recognition in Tennis Aman Sikka Stanford University Stanford, CA 94305 Rajbir Kataria Stanford University Stanford, CA 94305 asikka@stanford.edu rkataria@stanford.edu 1. Motivation As active
Classification and Detection in Images. D.A. Forsyth
 Classification and Detection in Images D.A. Forsyth Classifying Images Motivating problems detecting explicit images classifying materials classifying scenes Strategy build appropriate image features train
Classification and Detection in Images D.A. Forsyth Classifying Images Motivating problems detecting explicit images classifying materials classifying scenes Strategy build appropriate image features train
CS 231A Computer Vision (Fall 2011) Problem Set 4
 Problem Set 4") CS 231A Computer Vision (Fall 2011) Problem Set 4 Due: Nov. 30 th, 2011 (9:30am) 1 Part-based models for Object Recognition (50 points) One approach to object recognition is to use a deformable part-based
CS 231A Computer Vision (Fall 2011) Problem Set 4 Due: Nov. 30 th, 2011 (9:30am) 1 Part-based models for Object Recognition (50 points) One approach to object recognition is to use a deformable part-based
ECG782: Multidimensional Digital Signal Processing
 ECG782: Multidimensional Digital Signal Processing Object Recognition http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Knowledge Representation Statistical Pattern Recognition Neural Networks Boosting
ECG782: Multidimensional Digital Signal Processing Object Recognition http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Knowledge Representation Statistical Pattern Recognition Neural Networks Boosting
Image classification Computer Vision Spring 2018, Lecture 18
 Image classification http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 18 Course announcements Homework 5 has been posted and is due on April 6 th. - Dropbox link because course
Image classification http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 18 Course announcements Homework 5 has been posted and is due on April 6 th. - Dropbox link because course
Artistic ideation based on computer vision methods
 Journal of Theoretical and Applied Computer Science Vol. 6, No. 2, 2012, pp. 72 78 ISSN 2299-2634 http://www.jtacs.org Artistic ideation based on computer vision methods Ferran Reverter, Pilar Rosado,
Journal of Theoretical and Applied Computer Science Vol. 6, No. 2, 2012, pp. 72 78 ISSN 2299-2634 http://www.jtacs.org Artistic ideation based on computer vision methods Ferran Reverter, Pilar Rosado,
Today. Main questions 10/30/2008. Bag of words models. Last time: Local invariant features. Harris corner detector: rotation invariant detection
 Today Indexing with local features, Bag of words models Matching local features Indexing features Bag of words model Thursday, Oct 30 Kristen Grauman UT-Austin Main questions Where will the interest points
Today Indexing with local features, Bag of words models Matching local features Indexing features Bag of words model Thursday, Oct 30 Kristen Grauman UT-Austin Main questions Where will the interest points
A Comparison of l 1 Norm and l 2 Norm Multiple Kernel SVMs in Image and Video Classification
 A Comparison of l 1 Norm and l 2 Norm Multiple Kernel SVMs in Image and Video Classification Fei Yan Krystian Mikolajczyk Josef Kittler Muhammad Tahir Centre for Vision, Speech and Signal Processing University
A Comparison of l 1 Norm and l 2 Norm Multiple Kernel SVMs in Image and Video Classification Fei Yan Krystian Mikolajczyk Josef Kittler Muhammad Tahir Centre for Vision, Speech and Signal Processing University
Multiple Kernel Learning for Emotion Recognition in the Wild
 Multiple Kernel Learning for Emotion Recognition in the Wild Karan Sikka, Karmen Dykstra, Suchitra Sathyanarayana, Gwen Littlewort and Marian S. Bartlett Machine Perception Laboratory UCSD EmotiW Challenge,
Multiple Kernel Learning for Emotion Recognition in the Wild Karan Sikka, Karmen Dykstra, Suchitra Sathyanarayana, Gwen Littlewort and Marian S. Bartlett Machine Perception Laboratory UCSD EmotiW Challenge,
Recognizing human actions in still images: a study of bag-of-features and part-based representations
 DELAITRE, LAPTEV, SIVIC: RECOGNIZING HUMAN ACTIONS IN STILL IMAGES. 1 Recognizing human actions in still images: a study of bag-of-features and part-based representations Vincent Delaitre 1 vincent.delaitre@ens-lyon.org
DELAITRE, LAPTEV, SIVIC: RECOGNIZING HUMAN ACTIONS IN STILL IMAGES. 1 Recognizing human actions in still images: a study of bag-of-features and part-based representations Vincent Delaitre 1 vincent.delaitre@ens-lyon.org
Object Detection Based on Deep Learning
 Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Beyond Bags of Features: Spatial Pyramid Matching for Recognizing Natural Scene Categories
 Beyond Bags of Features: Spatial Pyramid Matching for Recognizing Natural Scene Categories Svetlana Lazebnik, Cordelia Schmid, and Jean Ponce CVR-TR-2005-04 Abstract This paper presents a method for recognizing
Beyond Bags of Features: Spatial Pyramid Matching for Recognizing Natural Scene Categories Svetlana Lazebnik, Cordelia Schmid, and Jean Ponce CVR-TR-2005-04 Abstract This paper presents a method for recognizing
Object Detection. Sanja Fidler CSC420: Intro to Image Understanding 1/ 1
 Object Detection Sanja Fidler CSC420: Intro to Image Understanding 1/ 1 Object Detection The goal of object detection is to localize objects in an image and tell their class Localization: place a tight
Object Detection Sanja Fidler CSC420: Intro to Image Understanding 1/ 1 Object Detection The goal of object detection is to localize objects in an image and tell their class Localization: place a tight
Computer Vision: Summary and Discussion
 12/05/2011 Computer Vision: Summary and Discussion Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem Announcements Today is last day of regular class Second quiz on Wednesday (Dec 7
12/05/2011 Computer Vision: Summary and Discussion Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem Announcements Today is last day of regular class Second quiz on Wednesday (Dec 7
Learning Realistic Human Actions from Movies
 Learning Realistic Human Actions from Movies Ivan Laptev*, Marcin Marszałek**, Cordelia Schmid**, Benjamin Rozenfeld*** INRIA Rennes, France ** INRIA Grenoble, France *** Bar-Ilan University, Israel Presented
Learning Realistic Human Actions from Movies Ivan Laptev*, Marcin Marszałek**, Cordelia Schmid**, Benjamin Rozenfeld*** INRIA Rennes, France ** INRIA Grenoble, France *** Bar-Ilan University, Israel Presented
Lecture 6: Texture. Tuesday, Sept 18
 Lecture 6: Texture Tuesday, Sept 18 Graduate students Problem set 1 extension ideas Chamfer matching Hierarchy of shape prototypes, search over translations Comparisons with Hausdorff distance, L1 on
Lecture 6: Texture Tuesday, Sept 18 Graduate students Problem set 1 extension ideas Chamfer matching Hierarchy of shape prototypes, search over translations Comparisons with Hausdorff distance, L1 on
Find that! Visual Object Detection Primer
 Find that! Visual Object Detection Primer SkTech/MIT Innovation Workshop August 16, 2012 Dr. Tomasz Malisiewicz tomasz@csail.mit.edu Find that! Your Goals...imagine one such system that drives information
Find that! Visual Object Detection Primer SkTech/MIT Innovation Workshop August 16, 2012 Dr. Tomasz Malisiewicz tomasz@csail.mit.edu Find that! Your Goals...imagine one such system that drives information
Object Detection Using Segmented Images
 Object Detection Using Segmented Images Naran Bayanbat Stanford University Palo Alto, CA naranb@stanford.edu Jason Chen Stanford University Palo Alto, CA jasonch@stanford.edu Abstract Object detection
Object Detection Using Segmented Images Naran Bayanbat Stanford University Palo Alto, CA naranb@stanford.edu Jason Chen Stanford University Palo Alto, CA jasonch@stanford.edu Abstract Object detection
Fitting: Voting and the Hough Transform April 23 rd, Yong Jae Lee UC Davis
 Fitting: Voting and the Hough Transform April 23 rd, 2015 Yong Jae Lee UC Davis Last time: Grouping Bottom-up segmentation via clustering To find mid-level regions, tokens General choices -- features,
Fitting: Voting and the Hough Transform April 23 rd, 2015 Yong Jae Lee UC Davis Last time: Grouping Bottom-up segmentation via clustering To find mid-level regions, tokens General choices -- features,
REJECTION-BASED CLASSIFICATION FOR ACTION RECOGNITION USING A SPATIO-TEMPORAL DICTIONARY. Stefen Chan Wai Tim, Michele Rombaut, Denis Pellerin
 REJECTION-BASED CLASSIFICATION FOR ACTION RECOGNITION USING A SPATIO-TEMPORAL DICTIONARY Stefen Chan Wai Tim, Michele Rombaut, Denis Pellerin Univ. Grenoble Alpes, GIPSA-Lab, F-38000 Grenoble, France ABSTRACT
REJECTION-BASED CLASSIFICATION FOR ACTION RECOGNITION USING A SPATIO-TEMPORAL DICTIONARY Stefen Chan Wai Tim, Michele Rombaut, Denis Pellerin Univ. Grenoble Alpes, GIPSA-Lab, F-38000 Grenoble, France ABSTRACT
Object recognition. Methods for classification and image representation
 Object recognition Methods for classification and image representation Credits Slides by Pete Barnum Slides by FeiFei Li Paul Viola, Michael Jones, Robust Realtime Object Detection, IJCV 04 Navneet Dalal
Object recognition Methods for classification and image representation Credits Slides by Pete Barnum Slides by FeiFei Li Paul Viola, Michael Jones, Robust Realtime Object Detection, IJCV 04 Navneet Dalal