Image warping and stitching
|
|
|
- Geoffrey Cummings
- 6 years ago
- Views:
Transcription

1 Image warping and stitching Thurs Oct 15 Last time Feature-based alignment 2D transformations Affine fit RANSAC 1
 Source: L. Lazebnik RANSAC: General form RANSAC loop: 1. Randomly select a seed group of points on which to base transformation estimate (e.g., a group of matches) 2.")
2 Robust feature-based alignment Extract features Compute putative matches Loop: Hypothesize transformation T (small group of putative matches that are related by T) Verify transformation (search for other matches consistent with T) Source: L. Lazebnik RANSAC: General form RANSAC loop: 1. Randomly select a seed group of points on which to base transformation estimate (e.g., a group of matches) 2. Compute transformation from seed group 3. Find inliers to this transformation 4. If the number of inliers is sufficiently large, re-compute estimate of transformation on all of the inliers Keep the transformation with the largest number of inliers 2
3 RANSAC example: Translation Putative matches Source: Rick Szeliski RANSAC example: Translation Select one match, count inliers 3
4 RANSAC example: Translation Select one match, count inliers RANSAC example: Translation Find average translation vector 4
5 RANSAC pros and cons Pros Simple and general Applicable to many different problems Often works well in practice Cons Lots of parameters to tune Doesn t work well for low inlier ratios (too many iterations, or can fail completely) Can t always get a good initialization of the model based on the minimum number of samples Lana Lazebnik Another example Automatic scanned document rotater using Hough lines and RANSAC 5
6 Gen Hough vs RANSAC GHT Single correspondence -> vote for all consistent parameters Represents uncertainty in the model parameter space Linear complexity in number of correspondences and number of voting cells; beyond 4D vote space impractical Can handle high outlier ratio RANSAC Minimal subset of correspondences to estimate model -> count inliers Represents uncertainty in image space Must search all data points to check for inliers each iteration Scales better to high-d parameter spaces Kristen Grauman Today Image mosaics Fitting a 2D transformation Affine, Homography 2D image warping Computing an image mosaic 6
7 Mosaics... image from S. Seitz Obtain a wider angle view by combining multiple images. Main questions T Alignment: Given two images, what is the transformation between them? T Warping: Given a source image and a transformation, what does the transformed output look like? 7
8 8 2D Affine Transformations Affine transformations are combinations of Linear transformations, and Translations Parallel lines remain parallel w y x f e d c b a w y x ' ' ' Projective Transformations Projective transformations: Affine transformations, and Projective warps Parallel lines do not necessarily remain parallel w y x i h g f e d c b a w y x ' ' '
9 2D transformation models Similarity (translation, scale, rotation) Affine Projective (homography) How to stitch together a panorama (a.k.a. mosaic)? Basic Procedure Take a sequence of images from the same position Rotate the camera about its optical center Compute transformation between second image and first Transform the second image to overlap with the first Blend the two together to create a mosaic (If there are more images, repeat) but wait, why should this work at all? What about the 3D geometry of the scene? Why aren t we using it? Source: Stev e Seitz 9
10 Pinhole camera Pinhole camera is a simple model to approximate imaging process, perspective projection. Image plane Virtual image pinhole If we treat pinhole as a point, only one ray from any given point can enter the camera. Fig f rom Forsy th and Ponce Mosaics... image from S. Seitz Obtain a wider angle view by combining multiple images. 10
11 Mosaics: generating synthetic views real camera synthetic camera Can generate any synthetic camera view as long as it has the same center of projection! Source: Alyosha Efros Image reprojection mosaic PP The mosaic has a natural interpretation in 3D The images are reprojected onto a common plane The mosaic is formed on this plane Mosaic is a synthetic wide-angle camera Source: Steve Seitz 11
12 Image reprojection Basic question How to relate two images from the same camera center? how to map a pixel from PP1 to PP2 Answer Cast a ray through each pixel in PP1 Draw the pixel where that ray intersects PP2 Observation: Rather than thinking of this as a 3D reprojection, think of it as a 2D image warp from one image to another. PP1 PP2 Source: Aly osha Ef ros Image reprojection: Homography A projective transform is a mapping between any two PPs with the same center of projection rectangle should map to arbitrary quadrilateral parallel lines aren t but must preserve straight lines called Homography PP2 wx' wy' w p * * * * * * H * x * y * 1 p PP1 Source: Alyosha Efros 12
13 Homography x, y 1 1 x, y 1 1 x, y 2 2 x 2, y 2 x, x, n y n n y n To compute the homography given pairs of corresponding points in the images, we need to set up an equation where the parameters of H are the unknowns Solving for homographies Can set scale factor i=1. So, there are 8 unknowns. Set up a system of linear equations: Ah = b where vector of unknowns h = [a,b,c,d,e,f,g,h] T Need at least 8 eqs, but the more the better Solve for h. If overconstrained, solve using least-squares: >> help lmdivide p = Hp wx' a b c x wy' d e f y w g h i 1 min Ah b 2 BOARD 13
14 x, y Homography wx wy w, w x, y To apply a given homography H Compute p = Hp (regular matrix multiply) Convert p from homogeneous to image coordinates wx' wy' w p * * * * * * H * x * y * 1 p RANSAC for estimating homography RANSAC loop: 1. Select four feature pairs (at random) 2. Compute homography H 3. Compute inliers where SSD(p i, Hp i )< ε 4. Keep largest set of inliers 5. Re-compute least-squares H estimate on all of the inliers Slide credit: Steve Seitz 14
15 Today Image mosaics Fitting a 2D transformation Affine, Homography 2D image warping Computing an image mosaic Image warping T(x,y) y y x x f(x,y) g(x,y ) Given a coordinate transform and a source image f(x,y), how do we compute a transformed image g(x,y ) = f(t(x,y))? Slide from Alyosha Efros, CMU 15
16 Forward warping T(x,y) y y x f(x,y) x g(x,y ) Send each pixel f(x,y) to its corresponding location (x,y ) = T(x,y) in the second image Q: what if pixel lands between two pixels? Slide from Alyosha Efros, CMU Forward warping T(x,y) y y x x f(x,y) g(x,y ) Send each pixel f(x,y) to its corresponding location (x,y ) = T(x,y) in the second image Q: what if pixel lands between two pixels? A: distribute color among neighboring pixels (x,y ) Known as splatting Slide from Alyosha Efros, CMU 16
 = T -1 (x,y ) in the first image Q: what if pixel comes")
 y x x f(x,y) g(x,y ) Get each")

17 Inverse warping y T -1 (x,y) y x f(x,y) x g(x,y ) Get each pixel g(x,y ) from its corresponding location (x,y) = T -1 (x,y ) in the first image Q: what if pixel comes from between two pixels? Slide from Alyosha Efros, CMU Inverse warping y T -1 (x,y) y x x f(x,y) g(x,y ) Get each pixel g(x,y ) from its corresponding location (x,y) = T -1 (x,y ) in the first image Q: what if pixel comes from between two pixels? A: Interpolate color value from neighbors Slide from Alyosha Efros, CMU nearest neighbor, bilinear >> help interp2 17
18 Bilinear interpolation Sampling at f(x,y): Slide from Alyosha Efros, CMU Recap: How to stitch together a panorama (a.k.a. mosaic)? Basic Procedure Take a sequence of images from the same position Rotate the camera about its optical center Compute transformation (homography) between second image and first using corresponding points. Transform the second image to overlap with the first. Blend the two together to create a mosaic. (If there are more images, repeat) Source: Stev e Seitz 18

19 Image warping with homographies image plane in front black area w here no pixel maps to image plane below Source: Steve Seitz Image rectification p p 19


20 Automatic rectification 10/14/2015 Analysing patterns and shapes What is the shape of the b/w floor pattern? The floor (enlarged) Slide from Antonio Criminisi Automatically rectified floor Analysing patterns and shapes From Martin Kemp The Science of Art (manual reconstruction) Slide from Antonio Criminisi 20


21 Analysing patterns and shapes What is the (complicated) shape of the floor pattern? St. Lucy Altarpiece, D. Veneziano Slide from Criminisi Automatically rectified floor Analysing patterns and shapes Automatic rectification From Martin Kemp, The Science of Art (manual reconstruction) Slide from Criminisi 21




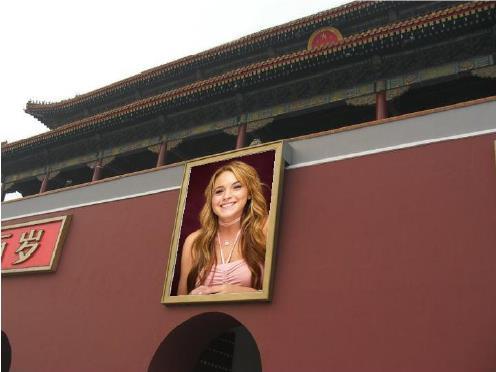
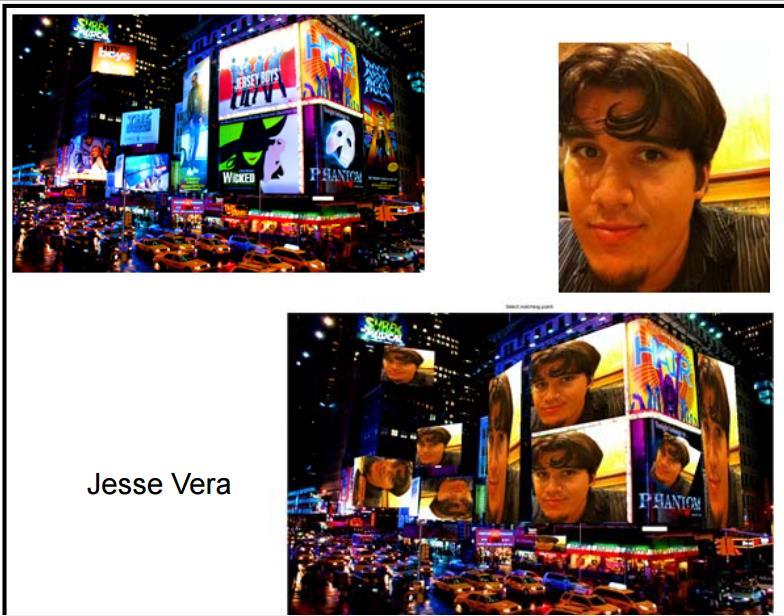
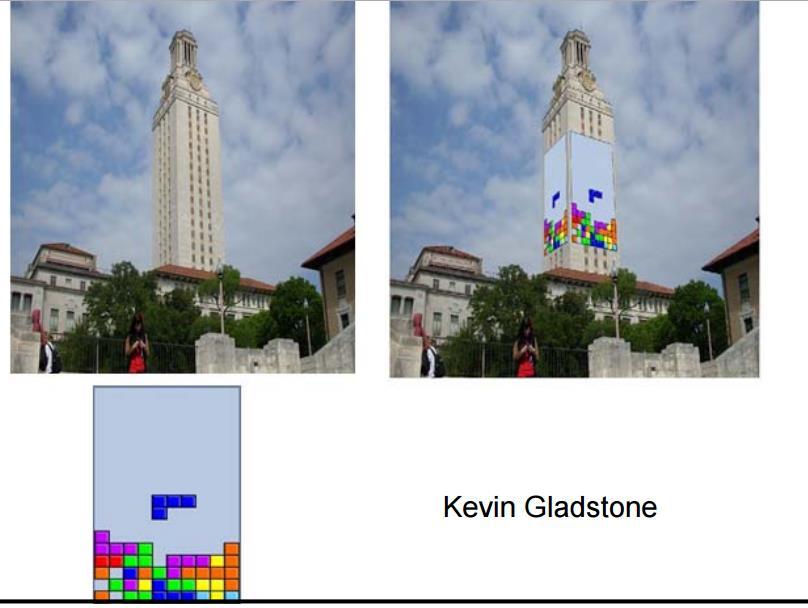
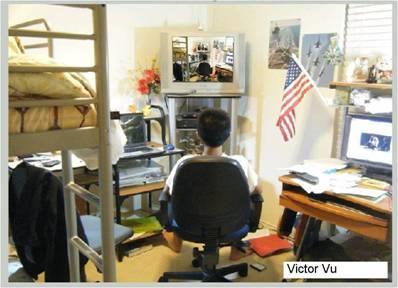
22 Andrew Harp Andy Luong Sung Ju Hwang Ekapol Chuangsuwanich, CMU 22
23 23
24 HP frames commercials Qk Changing camera center Does it still work? synthetic PP PP1 PP2 Source: Aly osha Ef ros 24
25 Recall: same camera center real camera synthetic camera Can generate synthetic camera view as long as it has the same center of projection. Source: Alyosha Efros Or: Planar scene (or far away) PP3 PP1 PP2 PP3 is a projection plane of both centers of projection, so we are OK! This is how big aerial photographs are made Source: Alyosha Efros 25


26 Boundary extension Wide-Angle Memories of Close- Up Scenes, Helene Intraub and Michael Richardson, Journal of Experimental Psychology: Learning, Memory, and Cognition, 1989, Vol. 15, No. 2,



27 Creating and Exploring a Large Photorealistic Virtual Space Josef Sivic, Biliana Kaneva, Antonio Torralba, Shai Avidan and William T. Freeman, Internet Vision Workshop, CVPR Creating and Exploring a Large Photorealistic Virtual Space Current view, and desired view in green Synthesized view from new camera Induced camera motion 27
28 Summary: alignment & warping Write 2d transformations as matrix-vector multiplication (including translation when we use homogeneous coordinates) Perform image warping (forward, inverse) Fitting transformations: solve for unknown parameters given corresponding points from two views (affine, projective (homography)). Mosaics: uses homography and image warping to merge views taken from same center of projection. Panoramas: main steps 1. Collect correspondences (manually for now) 2. Solve for homography matrix H Least squares solution 3. Warp content from one image frame to the other to combine: say im1 into im2 reference frame Determine bounds of the new combined image Where will the corners of im1 fall in im2 s coordinate frame? We will attempt to lookup colors for any of these positions we can get from im1. Compute coordinates in im1 s reference frame (via homography) for all points in that range Lookup all colors for all these positions from im1 Inverse warp : interp2 (watch for nans) 4. Overlay im2 content onto the warped im1 content. Careful about new bounds of the output image: minx, miny 28
29 Panoramas: main steps 1. Collect correspondences (manually for now) 2. Solve for homography matrix H Least squares solution 3. Warp content from one image frame to the other to combine: say im1 into im2 reference frame Determine bounds of the new combined image: Where will the corners of im1 fall in im2 s coordinate frame? We will attempt to lookup colors for any of these positions we can get from im1. Compute coordinates in im1 s reference frame (via homography) for all points in that range: H -1 Lookup all colors for all these positions from im1 Inverse warp : interp2 (watch for nans : isnan) 4. Overlay im2 content onto the warped im1 content. Careful about new bounds of the output image: minx, miny H im1 im2 (Assuming we have solved for the H that maps points from im1 to im2.) wx2 x1 wy2 H y1 w 1 29
30 im1 im2 Panoramas: main steps 1. Collect correspondences (manually for now) 2. Solve for homography matrix H Least squares solution 3. Warp content from one image frame to the other to combine: say im1 into im2 reference frame Determine bounds of the new combined image: Where will the corners of im1 fall in im2 s coordinate frame? We will attempt to lookup colors for any of these positions we can get from im1. Inverse warp: Compute coordinates in im1 s reference frame (via homography) for all points in that range. Lookup all colors for all these positions from im1 (interp2) 4. Overlay im2 content onto the warped im1 content. 30
31 H -1 im1 im2 (Assuming we have solved for the H that maps points from im1 to im2.) im1 im2 im1 warped into reference frame of im2. Use interp2 to ask for the colors (possibly interpolated) from im1 at all the positions needed in im2 s reference frame. 31

32 Panoramas: main steps 1. Collect correspondences (manually for now) 2. Solve for homography matrix H Least squares solution 3. Warp content from one image frame to the other to combine: say im1 into im2 reference frame Determine bounds of the new combined image: Where will the corners of im1 fall in im2 s coordinate frame? We will attempt to lookup colors for any of these positions we can get from im1. Inverse warp: Compute coordinates in im1 s reference frame (via homography) for all points in that range. Lookup all colors for all these positions from im1 (interp2) 4. Overlay im2 content onto the warped im1 content. Careful about new bounds of the output image 32
33 Summary: alignment & warping Write 2d transformations as matrix-vector multiplication (including translation when we use homogeneous coordinates) Perform image warping (forward, inverse) Fitting transformations: solve for unknown parameters given corresponding points from two views (affine, projective (homography)). Mosaics: uses homography and image warping to merge views taken from same center of projection. 33
Image warping and stitching
 Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
Image warping and stitching
 Image warping and stitching May 5 th, 2015 Yong Jae Lee UC Davis PS2 due next Friday Announcements 2 Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 3 Alignment
Image warping and stitching May 5 th, 2015 Yong Jae Lee UC Davis PS2 due next Friday Announcements 2 Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 3 Alignment
Mosaics wrapup & Stereo
 Mosaics wrapup & Stereo Tues Oct 20 Last time: How to stitch a panorama? Basic Procedure Take a sequence of images from the same position Rotate the camera about its optical center Compute transformation
Mosaics wrapup & Stereo Tues Oct 20 Last time: How to stitch a panorama? Basic Procedure Take a sequence of images from the same position Rotate the camera about its optical center Compute transformation
N-Views (1) Homographies and Projection
 Homographies and Projection") CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
Image Warping and Mosacing
 Image Warping and Mosacing 15-463: Rendering and Image Processing Alexei Efros with a lot of slides stolen from Steve Seitz and Rick Szeliski Today Mosacs Image Warping Homographies Programming Assignment
Image Warping and Mosacing 15-463: Rendering and Image Processing Alexei Efros with a lot of slides stolen from Steve Seitz and Rick Szeliski Today Mosacs Image Warping Homographies Programming Assignment
Local features and image matching May 8 th, 2018
 Local features and image matcing May 8 t, 2018 Yong Jae Lee UC Davis Last time RANSAC for robust fitting Lines, translation Image mosaics Fitting a 2D transformation Homograpy 2 Today Mosaics recap: How
Local features and image matcing May 8 t, 2018 Yong Jae Lee UC Davis Last time RANSAC for robust fitting Lines, translation Image mosaics Fitting a 2D transformation Homograpy 2 Today Mosaics recap: How
Homographies and RANSAC
 Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Mosaics. Today s Readings
 Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Epipolar Geometry and Stereo Vision
 CS 1699: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 8, 2015 Today Review Projective transforms Image stitching (homography) Epipolar
CS 1699: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 8, 2015 Today Review Projective transforms Image stitching (homography) Epipolar
Image Stitching. Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi
 Image Stitching Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi Combine two or more overlapping images to make one larger image Add example Slide credit: Vaibhav Vaish
Image Stitching Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi Combine two or more overlapping images to make one larger image Add example Slide credit: Vaibhav Vaish
Homographies and Mosaics
 Tri reort Homograhies and Mosaics Jeffrey Martin (jeffrey-martin.com) CS94: Image Maniulation & Comutational Photograhy with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 06 Steve Seitz and
Tri reort Homograhies and Mosaics Jeffrey Martin (jeffrey-martin.com) CS94: Image Maniulation & Comutational Photograhy with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 06 Steve Seitz and
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
Announcements. Mosaics. How to do it? Image Mosaics
 Announcements Mosaics Project artifact voting Project 2 out today (help session at end of class) http://www.destination36.com/start.htm http://www.vrseattle.com/html/vrview.php?cat_id=&vrs_id=vrs38 Today
Announcements Mosaics Project artifact voting Project 2 out today (help session at end of class) http://www.destination36.com/start.htm http://www.vrseattle.com/html/vrview.php?cat_id=&vrs_id=vrs38 Today
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 9: Image alignment http://www.wired.com/gadgetlab/2010/07/camera-software-lets-you-see-into-the-past/ Szeliski: Chapter 6.1 Reading All 2D Linear Transformations
CS4670: Computer Vision Noah Snavely Lecture 9: Image alignment http://www.wired.com/gadgetlab/2010/07/camera-software-lets-you-see-into-the-past/ Szeliski: Chapter 6.1 Reading All 2D Linear Transformations
Announcements. Mosaics. Image Mosaics. How to do it? Basic Procedure Take a sequence of images from the same position =
 Announcements Project 2 out today panorama signup help session at end of class Today mosaic recap blending Mosaics Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html
Announcements Project 2 out today panorama signup help session at end of class Today mosaic recap blending Mosaics Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html
Affine and Projective Transformations
 CS 674: Intro to Computer Vision Affine and Projective Transformations Prof. Adriana Kovaska Universit of Pittsburg October 3, 26 Alignment problem We previousl discussed ow to matc features across images,
CS 674: Intro to Computer Vision Affine and Projective Transformations Prof. Adriana Kovaska Universit of Pittsburg October 3, 26 Alignment problem We previousl discussed ow to matc features across images,
6.098 Digital and Computational Photography Advanced Computational Photography. Panoramas. Bill Freeman Frédo Durand MIT - EECS
 6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Panoramas Bill Freeman Frédo Durand MIT - EECS Lots of slides stolen from Alyosha Efros, who stole them from Steve Seitz
6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Panoramas Bill Freeman Frédo Durand MIT - EECS Lots of slides stolen from Alyosha Efros, who stole them from Steve Seitz
Panoramas. Why Mosaic? Why Mosaic? Mosaics: stitching images together. Why Mosaic? Olivier Gondry. Bill Freeman Frédo Durand MIT - EECS
 Olivier Gondry 6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Panoramas Director of music video and commercial Special effect specialist (Morphing, rotoscoping) Today
Olivier Gondry 6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Panoramas Director of music video and commercial Special effect specialist (Morphing, rotoscoping) Today
Warping. 12 May 2015
 Warping 12 May 2015 Warping, morphing, mosaic Slides from Durand and Freeman (MIT), Efros (CMU, Berkeley), Szeliski (MSR), Seitz (UW), Lowe (UBC) http://szeliski.org/book/ 2 Image Warping Image filtering:
Warping 12 May 2015 Warping, morphing, mosaic Slides from Durand and Freeman (MIT), Efros (CMU, Berkeley), Szeliski (MSR), Seitz (UW), Lowe (UBC) http://szeliski.org/book/ 2 Image Warping Image filtering:
Image warping , , Computational Photography Fall 2017, Lecture 10
 Image warping http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 10 Course announcements Second make-up lecture on Friday, October 6 th, noon-1:30
Image warping http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 10 Course announcements Second make-up lecture on Friday, October 6 th, noon-1:30
CS 2770: Intro to Computer Vision. Multiple Views. Prof. Adriana Kovashka University of Pittsburgh March 14, 2017
 CS 277: Intro to Computer Vision Multiple Views Prof. Adriana Kovashka Universit of Pittsburgh March 4, 27 Plan for toda Affine and projective image transformations Homographies and image mosaics Stereo
CS 277: Intro to Computer Vision Multiple Views Prof. Adriana Kovashka Universit of Pittsburgh March 4, 27 Plan for toda Affine and projective image transformations Homographies and image mosaics Stereo
Image stitching. Digital Visual Effects Yung-Yu Chuang. with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac
 Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Introduction to Computer Vision
 Introduction to Computer Vision Michael J. Black Oct 2009 Motion estimation Goals Motion estimation Affine flow Optimization Large motions Why affine? Monday dense, smooth motion and regularization. Robust
Introduction to Computer Vision Michael J. Black Oct 2009 Motion estimation Goals Motion estimation Affine flow Optimization Large motions Why affine? Monday dense, smooth motion and regularization. Robust
More Mosaic Madness. CS194: Image Manipulation & Computational Photography. Steve Seitz and Rick Szeliski. Jeffrey Martin (jeffrey-martin.
 More Mosaic Madness Jeffrey Martin (jeffrey-martin.com) CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2018 Steve Seitz and Rick
More Mosaic Madness Jeffrey Martin (jeffrey-martin.com) CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2018 Steve Seitz and Rick
Prof. Kristen Grauman
 Fitting Prof. Kristen Grauman UT Austin Fitting Want to associate a model with observed features [Fig from Marszalek & Schmid, 2007] For eample, the model could be a line, a circle, or an arbitrary shape.
Fitting Prof. Kristen Grauman UT Austin Fitting Want to associate a model with observed features [Fig from Marszalek & Schmid, 2007] For eample, the model could be a line, a circle, or an arbitrary shape.
Feature Matching and RANSAC
 Feature Matching and RANSAC Recognising Panoramas. [M. Brown and D. Lowe,ICCV 2003] [Brown, Szeliski, Winder, CVPR 2005] with a lot of slides stolen from Steve Seitz, Rick Szeliski, A. Efros Introduction
Feature Matching and RANSAC Recognising Panoramas. [M. Brown and D. Lowe,ICCV 2003] [Brown, Szeliski, Winder, CVPR 2005] with a lot of slides stolen from Steve Seitz, Rick Szeliski, A. Efros Introduction
Automatic Image Alignment (feature-based)
") Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Fitting a transformation: Feature-based alignment April 30 th, Yong Jae Lee UC Davis
 Fitting a transformation: Feature-based alignment April 3 th, 25 Yong Jae Lee UC Davis Announcements PS2 out toda; due 5/5 Frida at :59 pm Color quantization with k-means Circle detection with the Hough
Fitting a transformation: Feature-based alignment April 3 th, 25 Yong Jae Lee UC Davis Announcements PS2 out toda; due 5/5 Frida at :59 pm Color quantization with k-means Circle detection with the Hough
CS4670: Computer Vision
 CS467: Computer Vision Noah Snavely Lecture 8: Geometric transformations Szeliski: Chapter 3.6 Reading Announcements Project 2 out today, due Oct. 4 (demo at end of class today) Image alignment Why don
CS467: Computer Vision Noah Snavely Lecture 8: Geometric transformations Szeliski: Chapter 3.6 Reading Announcements Project 2 out today, due Oct. 4 (demo at end of class today) Image alignment Why don
CSE 527: Introduction to Computer Vision
 CSE 527: Introduction to Computer Vision Week 5 - Class 1: Matching, Stitching, Registration September 26th, 2017 ??? Recap Today Feature Matching Image Alignment Panoramas HW2! Feature Matches Feature
CSE 527: Introduction to Computer Vision Week 5 - Class 1: Matching, Stitching, Registration September 26th, 2017 ??? Recap Today Feature Matching Image Alignment Panoramas HW2! Feature Matches Feature
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
Agenda. Rotations. Camera models. Camera calibration. Homographies
 Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Instance-level recognition I. - Camera geometry and image alignment
 Reconnaissance d objets et vision artificielle 2011 Instance-level recognition I. - Camera geometry and image alignment Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire
Reconnaissance d objets et vision artificielle 2011 Instance-level recognition I. - Camera geometry and image alignment Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire
Automatic Image Alignment
 Automatic Image Alignment Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2010 Live Homography DEMO Check out panoramio.com
Automatic Image Alignment Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2010 Live Homography DEMO Check out panoramio.com
Instance-level recognition part 2
 Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Automatic Image Alignment (direct) with a lot of slides stolen from Steve Seitz and Rick Szeliski
 with a lot of slides stolen from Steve Seitz and Rick Szeliski") Automatic Image Alignment (direct) with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Today Go over Midterm Go over Project #3
Automatic Image Alignment (direct) with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Today Go over Midterm Go over Project #3
Agenda. Rotations. Camera calibration. Homography. Ransac
 Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Midterm Examination CS 534: Computational Photography
 Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Today s lecture. Image Alignment and Stitching. Readings. Motion models
 Today s lecture Image Alignment and Stitching Computer Vision CSE576, Spring 2005 Richard Szeliski Image alignment and stitching motion models cylindrical and spherical warping point-based alignment global
Today s lecture Image Alignment and Stitching Computer Vision CSE576, Spring 2005 Richard Szeliski Image alignment and stitching motion models cylindrical and spherical warping point-based alignment global
Single-view 3D Reconstruction
 Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
Camera Geometry II. COS 429 Princeton University
 Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Camera Calibration. COS 429 Princeton University
 Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Introduction to Computer Vision
 Introduction to Computer Vision Michael J. Black Nov 2009 Perspective projection and affine motion Goals Today Perspective projection 3D motion Wed Projects Friday Regularization and robust statistics
Introduction to Computer Vision Michael J. Black Nov 2009 Perspective projection and affine motion Goals Today Perspective projection 3D motion Wed Projects Friday Regularization and robust statistics
Automatic Image Alignment
 Automatic Image Alignment with a lot of slides stolen from Steve Seitz and Rick Szeliski Mike Nese CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2018 Live Homography
Automatic Image Alignment with a lot of slides stolen from Steve Seitz and Rick Szeliski Mike Nese CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2018 Live Homography
Broad field that includes low-level operations as well as complex high-level algorithms
 Image processing About Broad field that includes low-level operations as well as complex high-level algorithms Low-level image processing Computer vision Computational photography Several procedures and
Image processing About Broad field that includes low-level operations as well as complex high-level algorithms Low-level image processing Computer vision Computational photography Several procedures and
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Image Features: Local Descriptors. Sanja Fidler CSC420: Intro to Image Understanding 1/ 58
 Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
There are many cues in monocular vision which suggests that vision in stereo starts very early from two similar 2D images. Lets see a few...
 STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Miniature faking. In close-up photo, the depth of field is limited.
 Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Local features and image matching. Prof. Xin Yang HUST
 Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
CS 1674: Intro to Computer Vision. Midterm Review. Prof. Adriana Kovashka University of Pittsburgh October 10, 2016
 CS 1674: Intro to Computer Vision Midterm Review Prof. Adriana Kovashka University of Pittsburgh October 10, 2016 Reminders The midterm exam is in class on this coming Wednesday There will be no make-up
CS 1674: Intro to Computer Vision Midterm Review Prof. Adriana Kovashka University of Pittsburgh October 10, 2016 Reminders The midterm exam is in class on this coming Wednesday There will be no make-up
METRIC PLANE RECTIFICATION USING SYMMETRIC VANISHING POINTS
 METRIC PLANE RECTIFICATION USING SYMMETRIC VANISHING POINTS M. Lefler, H. Hel-Or Dept. of CS, University of Haifa, Israel Y. Hel-Or School of CS, IDC, Herzliya, Israel ABSTRACT Video analysis often requires
METRIC PLANE RECTIFICATION USING SYMMETRIC VANISHING POINTS M. Lefler, H. Hel-Or Dept. of CS, University of Haifa, Israel Y. Hel-Or School of CS, IDC, Herzliya, Israel ABSTRACT Video analysis often requires
Warping, Morphing and Mosaics
 Computational Photograph and Video: Warping, Morphing and Mosaics Prof. Marc Pollefes Dr. Gabriel Brostow Toda s schedule Last week s recap Warping Morphing Mosaics Toda s schedule Last week s recap Warping
Computational Photograph and Video: Warping, Morphing and Mosaics Prof. Marc Pollefes Dr. Gabriel Brostow Toda s schedule Last week s recap Warping Morphing Mosaics Toda s schedule Last week s recap Warping
CS664 Lecture #16: Image registration, robust statistics, motion
 CS664 Lecture #16: Image registration, robust statistics, motion Some material taken from: Alyosha Efros, CMU http://www.cs.cmu.edu/~efros Xenios Papademetris http://noodle.med.yale.edu/~papad/various/papademetris_image_registration.p
CS664 Lecture #16: Image registration, robust statistics, motion Some material taken from: Alyosha Efros, CMU http://www.cs.cmu.edu/~efros Xenios Papademetris http://noodle.med.yale.edu/~papad/various/papademetris_image_registration.p
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1)
 (New book: 7.2.1, old book: 11.1)") Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
Image stitching. Announcements. Outline. Image stitching
 Announcements Image stitching Project #1 was due yesterday. Project #2 handout will be available on the web later tomorrow. I will set up a webpage for artifact voting soon. Digital Visual Effects, Spring
Announcements Image stitching Project #1 was due yesterday. Project #2 handout will be available on the web later tomorrow. I will set up a webpage for artifact voting soon. Digital Visual Effects, Spring
CS4670: Computer Vision
 CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
Introduction to Computer Vision. Week 3, Fall 2010 Instructor: Prof. Ko Nishino
 Introduction to Computer Vision Week 3, Fall 2010 Instructor: Prof. Ko Nishino Last Week! Image Sensing " Our eyes: rods and cones " CCD, CMOS, Rolling Shutter " Sensing brightness and sensing color! Projective
Introduction to Computer Vision Week 3, Fall 2010 Instructor: Prof. Ko Nishino Last Week! Image Sensing " Our eyes: rods and cones " CCD, CMOS, Rolling Shutter " Sensing brightness and sensing color! Projective
Image Warping and Morphing. Alexey Tikhonov : Computational Photography Alexei Efros, CMU, Fall 2007
 Image Warping and Morphing Alexey Tikhonov 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Image Warping in Biology D'Arcy Thompson http://www-groups.dcs.st-and.ac.uk/~history/miscellaneous/darcy.html
Image Warping and Morphing Alexey Tikhonov 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Image Warping in Biology D'Arcy Thompson http://www-groups.dcs.st-and.ac.uk/~history/miscellaneous/darcy.html
Homography estimation
 RANSAC continued Homography estimation x w? ~x img H~x w Homography estimation? x img ~x w = H 1 ~x img Homography estimation (0,0) (1,0) (6.4,2.8) (8.0,2.9) (5.6, 4.0) (7.8, 4.2) (0,1) (1,1) Ah =0s.tkhk
RANSAC continued Homography estimation x w? ~x img H~x w Homography estimation? x img ~x w = H 1 ~x img Homography estimation (0,0) (1,0) (6.4,2.8) (8.0,2.9) (5.6, 4.0) (7.8, 4.2) (0,1) (1,1) Ah =0s.tkhk
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Recap: Features and filters. Recap: Grouping & fitting. Now: Multiple views 10/29/2008. Epipolar geometry & stereo vision. Why multiple views?
 Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
COSC579: Scene Geometry. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
Lecture 16: Computer Vision
 CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
Fitting. Lecture 8. Cristian Sminchisescu. Slide credits: K. Grauman, S. Seitz, S. Lazebnik, D. Forsyth, J. Ponce
 Fitting Lecture 8 Cristian Sminchisescu Slide credits: K. Grauman, S. Seitz, S. Lazebnik, D. Forsyth, J. Ponce Fitting We want to associate a model with observed features [Fig from Marszalek & Schmid,
Fitting Lecture 8 Cristian Sminchisescu Slide credits: K. Grauman, S. Seitz, S. Lazebnik, D. Forsyth, J. Ponce Fitting We want to associate a model with observed features [Fig from Marszalek & Schmid,
Lecture 16: Computer Vision
 CS442/542b: Artificial ntelligence Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field Methods
CS442/542b: Artificial ntelligence Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field Methods
Local features: detection and description May 12 th, 2015
 Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Single-view metrology
 Single-view metrology Magritte, Personal Values, 952 Many slides from S. Seitz, D. Hoiem Camera calibration revisited What if world coordinates of reference 3D points are not known? We can use scene features
Single-view metrology Magritte, Personal Values, 952 Many slides from S. Seitz, D. Hoiem Camera calibration revisited What if world coordinates of reference 3D points are not known? We can use scene features
Instance-level recognition II.
 Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Image Transfer Methods. Satya Prakash Mallick Jan 28 th, 2003
 Image Transfer Methods Satya Prakash Mallick Jan 28 th, 2003 Objective Given two or more images of the same scene, the objective is to synthesize a novel view of the scene from a view point where there
Image Transfer Methods Satya Prakash Mallick Jan 28 th, 2003 Objective Given two or more images of the same scene, the objective is to synthesize a novel view of the scene from a view point where there
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Image Warping and Morphing. Alexey Tikhonov
 Image Warping and Morphing Alexey Tikhonov CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2016 Women in Art video http://youtube.com/watch?v=nudion-_hxs Image Warping
Image Warping and Morphing Alexey Tikhonov CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2016 Women in Art video http://youtube.com/watch?v=nudion-_hxs Image Warping
Fitting. Fitting. Slides S. Lazebnik Harris Corners Pkwy, Charlotte, NC
 Fitting We ve learned how to detect edges, corners, blobs. Now what? We would like to form a higher-level, more compact representation of the features in the image by grouping multiple features according
Fitting We ve learned how to detect edges, corners, blobs. Now what? We would like to form a higher-level, more compact representation of the features in the image by grouping multiple features according
Lecture 20: Tracking. Tuesday, Nov 27
 Lecture 20: Tracking Tuesday, Nov 27 Paper reviews Thorough summary in your own words Main contribution Strengths? Weaknesses? How convincing are the experiments? Suggestions to improve them? Extensions?
Lecture 20: Tracking Tuesday, Nov 27 Paper reviews Thorough summary in your own words Main contribution Strengths? Weaknesses? How convincing are the experiments? Suggestions to improve them? Extensions?
Image stitching. Digital Visual Effects Yung-Yu Chuang. with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac
 Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Projective Geometry and Camera Models
 /2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
/2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
Step-by-Step Model Buidling
 Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Computer Vision CS 776 Fall 2018
 Computer Vision CS 776 Fall 2018 Cameras & Photogrammetry 1 Prof. Alex Berg (Slide credits to many folks on individual slides) Cameras & Photogrammetry 1 Albrecht Dürer early 1500s Brunelleschi, early
Computer Vision CS 776 Fall 2018 Cameras & Photogrammetry 1 Prof. Alex Berg (Slide credits to many folks on individual slides) Cameras & Photogrammetry 1 Albrecht Dürer early 1500s Brunelleschi, early
Camera Calibration. Schedule. Jesus J Caban. Note: You have until next Monday to let me know. ! Today:! Camera calibration
 Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
DD2423 Image Analysis and Computer Vision IMAGE FORMATION. Computational Vision and Active Perception School of Computer Science and Communication
 DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 253
 Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
RANSAC and some HOUGH transform
 RANSAC and some HOUGH transform Thank you for the slides. They come mostly from the following source Dan Huttenlocher Cornell U Matching and Fitting Recognition and matching are closely related to fitting
RANSAC and some HOUGH transform Thank you for the slides. They come mostly from the following source Dan Huttenlocher Cornell U Matching and Fitting Recognition and matching are closely related to fitting
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
EECS 442 Computer vision. Fitting methods
 EECS 442 Computer vision Fitting methods - Problem formulation - Least square methods - RANSAC - Hough transforms - Multi-model fitting - Fitting helps matching! Reading: [HZ] Chapters: 4, 11 [FP] Chapters:
EECS 442 Computer vision Fitting methods - Problem formulation - Least square methods - RANSAC - Hough transforms - Multi-model fitting - Fitting helps matching! Reading: [HZ] Chapters: 4, 11 [FP] Chapters:
Stitching and Blending
 Stitching and Blending Kari Pulli VP Computational Imaging Light First project Build your own (basic) programs panorama HDR (really, exposure fusion) The key components register images so their features
Stitching and Blending Kari Pulli VP Computational Imaging Light First project Build your own (basic) programs panorama HDR (really, exposure fusion) The key components register images so their features
Structure from Motion. Prof. Marco Marcon
 Structure from Motion Prof. Marco Marcon Summing-up 2 Stereo is the most powerful clue for determining the structure of a scene Another important clue is the relative motion between the scene and (mono)
Structure from Motion Prof. Marco Marcon Summing-up 2 Stereo is the most powerful clue for determining the structure of a scene Another important clue is the relative motion between the scene and (mono)
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 263
 Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
Image Warping. Many slides from Alyosha Efros + Steve Seitz. Photo by Sean Carroll
 Image Warping Man slides from Alosha Efros + Steve Seitz Photo b Sean Carroll Morphing Blend from one object to other with a series of local transformations Image Transformations image filtering: change
Image Warping Man slides from Alosha Efros + Steve Seitz Photo b Sean Carroll Morphing Blend from one object to other with a series of local transformations Image Transformations image filtering: change
Computer Vision I. Announcements. Random Dot Stereograms. Stereo III. CSE252A Lecture 16
 Announcements Stereo III CSE252A Lecture 16 HW1 being returned HW3 assigned and due date extended until 11/27/12 No office hours today No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in
Announcements Stereo III CSE252A Lecture 16 HW1 being returned HW3 assigned and due date extended until 11/27/12 No office hours today No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in
1 Projective Geometry
 CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and