ETMBA / F.Blume/ EHTC 2011 / /14/11/2011/ Eurocopter rights reserved
|
|
|
- Paula Francis
- 6 years ago
- Views:
Transcription

1 Multibody simulation of the power boosted control section of a medium sized helicopter EHTC, November 2011, Bonn Felix Blume, Eurocopter Deutschland GmbH
2 Outline Introduction and basis information Motivation for Multibody Simulation Development of Rigid Body Model Loads Validation First Results Status/Open Actions 2
3 Introduction Presenter information: Felix Blume, Development Engineer, Stress Department Analysis Rotors and Blades Blades Rotors Flight Control (power boosted and not power boosted) Hydraulics Gearboxes Drive Train Company information: Eurocopter Deutschland GmbH, EADS Group 4300 Employees Mainsite Donauwörth EC135, EC145, BO105, Tiger, NH90 3

4 Basis Information 4

 Hub Rotor without mechanical")

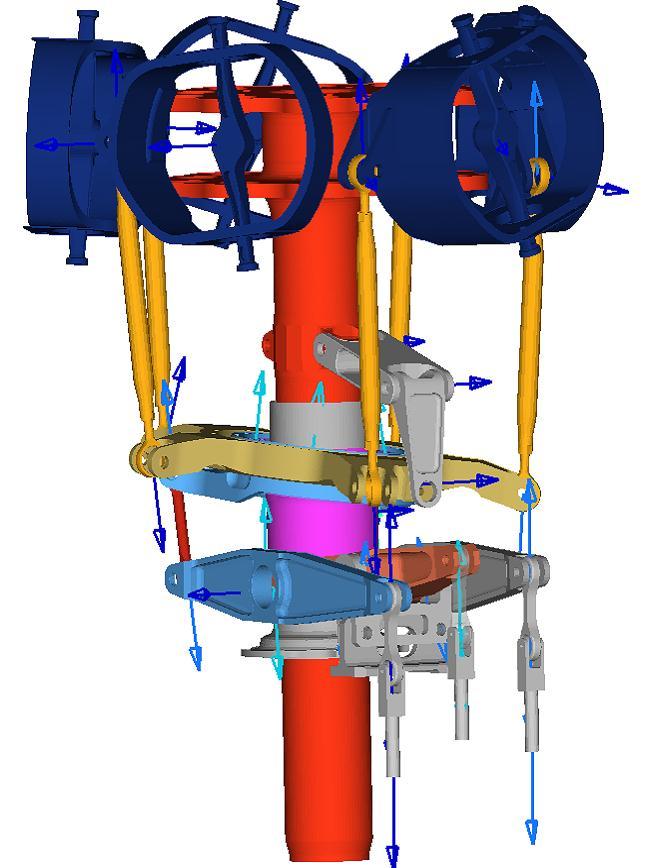
5 Basis Information Bearingless Main Rotor EC135 Lead-lag damper Flexbeam (flexible in torsion and flapwise / lead-lag direction) Hub Rotor without mechanical flapping and lead-lag hinge Control Cuff Feathering with flexible composite element Pitch Link 5
 Limit Load on Pitch Link 8500 N Limit load on collective booster axis 16500 N Scissor transfers rotating motion to bearing ring Three Booster")
6 Basis Information Power Boosted Control Section Mast Pitch Link Scissor Swashplate Pilot input force amplified by 3 hydraulic actuators (1 for each axis) Limit Load on Pitch Link 8500 N Limit load on collective booster axis N Scissor transfers rotating motion to bearing ring Three Booster Axis 6
7 Motivation for Multibody Simulation External loads (blade loads) are calculated from the aerodynamic department based on flight test results, scaling and CFD Interface loads measured during flight test In early phase of new design, no new flight test data available Current Status: Linear scaling of all interface loads for certain swashplate positions Exact load distribution is difficult to calculate for all swashplate positions Consequence: Calculated loads are conservative 7
8 Motivation for Multibody Simulation Interface loads to be determined by stress department based on blade loads and different swashplate positions by using advanced tools/methods Decision of introducing a Multibody Simulation Tool: Software : Altair MotionView (included already in Hyperworks) First two models created with support of Altair Building up competences for Multibody Simulation We are just at the beginning 8
 Calculation of mass and inertia (Mass= 53kg) Length of mast 918")
9 Development of Rigid Body Model Geometrical Data Imported from Catia V5 37 solid bodies Meshed with Hypermesh Assignment of Properties (Aluminium and Titanium) Calculation of mass and inertia (Mass= 53kg) Length of mast 918 mm 9
10 Development of Rigid Body Model 37 Rigid Bodies 12 revolute joints 14 ball joints 5 inline joints 7 constant velocity joints 4 cylindrical joints Some joints are statically overdetermined, but in reality there is an existing play, i.e. not fully blocked) 10

11 Development of Rigid Body Model Defined motions: Rotation rotormast: 415 RPM Max. translational movement of the 3 control axis: Longitudinal: +/ mm Lateral: mm/ mm Collective: +/- 21 mm Max. blade angle: 17 Fwd 11

12 Development of Rigid Body Model 12
13 Loads External loads calculated by aerodynamic department Blade loads (flapping, leadlag and torsional moments, centrifugal force) Resulting control force in the rotating pitch link Loads calculation based on existing flight test data Harmonic analysis Scaled to different RPM values and geometrical blade data 13
14 Loads Limit Load curve Load on pitch link 1 for one full rotation (360 ) Rotation Angle = 0 when blade number one above tailboom Load is shifted with 72 phases between each pitch link 14

15 Loads Load introduction Limit Load curve is applied on each Pitch Link Load shifted with 72 phase clockwise Rotor is turning counter clockwise FPL1 FPL2 15

16 Loads Limit Load Manoeuvre: Turning Flight with VNE (Velocity Never Exceed) and max. bank angle Control inputs: Longitudinal: Lateral : Collective: mm 2.5 mm 18.7 mm 16
17 Loads 17
18 Validation Check of correct kinematic behaviour without external loads Clearance Reactive forces Gravity check Check of force sign convention with external load Comparison with flight test data (with similar rotor system) Comparison with analytically calculated forces for selected swashplate positions Final validation when flight test data is available 18

19 First Results Force Interface Bearing Ring / Pitch Link 19

20 First Results Booster forces vs. rotation angle Lateral Axis Longitudinal Axis Collective Axis 20
21 Status / Open Actions Status First Validation performed Booster loads calculated Open Actions Interface loads for the remaining parts Stress calculation of the parts (FEM and Analytical) Introduction of Flexbodies for some parts (Booster Levers) Conclusion Multibody Simulation has raising importance for stress calculation of dynamic systems
22 Status / Open Actions Thank you for your attention. Questions?
Virtual Testing Methodology for TPL Lifting Capacity of Agricultural Tractor TPL
 Virtual Testing Methodology for TPL Lifting Capacity of Agricultural Tractor TPL Dheeraj Pandey AM CAE International Tractors Limited Jalandhar Road, Hoshiarpur 146001 - India dheerajpandey@sonalika.com
Virtual Testing Methodology for TPL Lifting Capacity of Agricultural Tractor TPL Dheeraj Pandey AM CAE International Tractors Limited Jalandhar Road, Hoshiarpur 146001 - India dheerajpandey@sonalika.com
Altair HTC09 Ludwigsburg 2nd-4th November 2009
 Altair HTC09 Ludwigsburg 2nd-4th November 2009 Analysis with RADIOSS of a bird strike onto a helicopter blade and onto a rotor control chain Francesca Bianchi INTRODUCTION The demostration that bird strike
Altair HTC09 Ludwigsburg 2nd-4th November 2009 Analysis with RADIOSS of a bird strike onto a helicopter blade and onto a rotor control chain Francesca Bianchi INTRODUCTION The demostration that bird strike
Advanced Multi-Body Modeling of Rotor Blades Validation and Application
 Advanced Multi-Body Modeling of Rotor s Validation and Application For efficient wind turbine energy production, larger rotors are required for which slender blades with increased flexibility are often
Advanced Multi-Body Modeling of Rotor s Validation and Application For efficient wind turbine energy production, larger rotors are required for which slender blades with increased flexibility are often
Kinematic and Dynamic Analysis of Stephenson Six Bar Mechanism Using HyperWorks
 Kinematic and Dynamic Analysis of Stephenson Six Bar Mechanism Using HyperWorks Kailash Chaudhary Phd Scholar Malaviya National Institute of Technology,Jaipur JLN Marg, Jaipur - 302 017, India Dr. Himanshu
Kinematic and Dynamic Analysis of Stephenson Six Bar Mechanism Using HyperWorks Kailash Chaudhary Phd Scholar Malaviya National Institute of Technology,Jaipur JLN Marg, Jaipur - 302 017, India Dr. Himanshu
The Dynamic Characteristics Analysis of Rotor Blade Based on ANSYS
 The Dynamic Characteristics Analysis of Rotor Blade Based on ANSYS Nian-zhao Jiang, Xiang-lin Ma, Zhi-qing Zhang The Research Institute of Simulation Technology of Nanjing, No. 766 Zhujiang Road, Nanjing,210016,
The Dynamic Characteristics Analysis of Rotor Blade Based on ANSYS Nian-zhao Jiang, Xiang-lin Ma, Zhi-qing Zhang The Research Institute of Simulation Technology of Nanjing, No. 766 Zhujiang Road, Nanjing,210016,
USE OF ADAMS IN DYNAMIC SIMULATION OF LANDING GEAR RETRACTION AND EXTENSION
 USE OF ADAMS IN DYNAMIC SIMULATION OF LANDING GEAR RETRACTION AND EXTENSION Author : O. NOEL Messier-Dowty SA (Velizy, France) 1. ABSTRACT This paper presents the method in use at Messier-Dowty SA during
USE OF ADAMS IN DYNAMIC SIMULATION OF LANDING GEAR RETRACTION AND EXTENSION Author : O. NOEL Messier-Dowty SA (Velizy, France) 1. ABSTRACT This paper presents the method in use at Messier-Dowty SA during
Multibody Model for Planetary Gearbox of 500 kw Wind Turbine
 Downloaded from orbit.dtu.dk on: Oct 19, 2018 Multibody Model for Planetary Gearbox of 500 kw Wind Turbine Jørgensen, Martin Felix Publication date: 2013 Link back to DTU Orbit Citation (APA): Jørgensen,
Downloaded from orbit.dtu.dk on: Oct 19, 2018 Multibody Model for Planetary Gearbox of 500 kw Wind Turbine Jørgensen, Martin Felix Publication date: 2013 Link back to DTU Orbit Citation (APA): Jørgensen,
Role of Kinematic Analysis in tuning the Dynamic Behavior of a Formula Car
 gopalax -International Journal of Technology And Engineering System(IJTES): Jan March 2011- Vol.2.No.3. Role of Kinematic Analysis in tuning the Dynamic Behavior of a Formula Car K. J. Prashanth 1, Ashish
gopalax -International Journal of Technology And Engineering System(IJTES): Jan March 2011- Vol.2.No.3. Role of Kinematic Analysis in tuning the Dynamic Behavior of a Formula Car K. J. Prashanth 1, Ashish
MSC Software Aeroelastic Tools. Mike Coleman and Fausto Gill di Vincenzo
 MSC Software Aeroelastic Tools Mike Coleman and Fausto Gill di Vincenzo MSC Software Confidential 2 MSC Software Confidential 3 MSC Software Confidential 4 MSC Software Confidential 5 MSC Flightloads An
MSC Software Aeroelastic Tools Mike Coleman and Fausto Gill di Vincenzo MSC Software Confidential 2 MSC Software Confidential 3 MSC Software Confidential 4 MSC Software Confidential 5 MSC Flightloads An
2. Motion Analysis - Sim-Mechanics
 2 Motion Analysis - Sim-Mechanics Figure 1 - The RR manipulator frames The following table tabulates the summary of different types of analysis that is performed for the RR manipulator introduced in the
2 Motion Analysis - Sim-Mechanics Figure 1 - The RR manipulator frames The following table tabulates the summary of different types of analysis that is performed for the RR manipulator introduced in the
FEM (MSC.Nastran SOL600) and Multibody (MSC.Adams flexible contact) solutions: an application example in helicopter rotor analysis
 and Multibody (MSC.Adams flexible contact) solutions: an application example in helicopter rotor analysis") FEM (MSC.Nastran SOL6) and Multibody (MSC.Adams flexible contact) solutions: an application example in helicopter rotor analysis Daniele Catelani MSC. Software - EMEA Aerospace Consultant Francesca Bianchi
FEM (MSC.Nastran SOL6) and Multibody (MSC.Adams flexible contact) solutions: an application example in helicopter rotor analysis Daniele Catelani MSC. Software - EMEA Aerospace Consultant Francesca Bianchi
The new HyperMesh - Samcef interface.
 The new HyperMesh - Samcef interface. Deployment and industrial applications at Eurocopter. Ronan PITOIS Dynamic systems dpt. Presentation plan Eurocopter overview Stress computation performed in Eurocopter
The new HyperMesh - Samcef interface. Deployment and industrial applications at Eurocopter. Ronan PITOIS Dynamic systems dpt. Presentation plan Eurocopter overview Stress computation performed in Eurocopter
Multi-Body Simulation of Earthmoving Equipment using MotionView / MotionSolve
 Multi-Body Simulation of Earthmoving Equipment using MotionView / MotionSolve Amit Srivastava Manager Larsen & Toubro IES Knowledge City, NH8 Vadodara 390 019, India Gopikrishnan. M Assistant Manager Larsen
Multi-Body Simulation of Earthmoving Equipment using MotionView / MotionSolve Amit Srivastava Manager Larsen & Toubro IES Knowledge City, NH8 Vadodara 390 019, India Gopikrishnan. M Assistant Manager Larsen
Manipulator Dynamics: Two Degrees-of-freedom
 Manipulator Dynamics: Two Degrees-of-freedom 2018 Max Donath Manipulator Dynamics Objective: Calculate the torques necessary to overcome dynamic effects Consider 2 dimensional example Based on Lagrangian
Manipulator Dynamics: Two Degrees-of-freedom 2018 Max Donath Manipulator Dynamics Objective: Calculate the torques necessary to overcome dynamic effects Consider 2 dimensional example Based on Lagrangian
Analysis and control of wind turbine generators
 Analysis and control of wind turbine generators Eolica Expo 2004 Roma,, September 30 October 2, 2004 Carlo L. Bottasso, Lorenzo Trainelli, Alessandro Croce, Walter Sirchi, Barbara Savini Dipartimento di
Analysis and control of wind turbine generators Eolica Expo 2004 Roma,, September 30 October 2, 2004 Carlo L. Bottasso, Lorenzo Trainelli, Alessandro Croce, Walter Sirchi, Barbara Savini Dipartimento di
Model Library Mechanics
 Model Library Mechanics Using the libraries Mechanics 1D (Linear), Mechanics 1D (Rotary), Modal System incl. ANSYS interface, and MBS Mechanics (3D) incl. CAD import via STL and the additional options
Model Library Mechanics Using the libraries Mechanics 1D (Linear), Mechanics 1D (Rotary), Modal System incl. ANSYS interface, and MBS Mechanics (3D) incl. CAD import via STL and the additional options
QUANSER Flight Control Systems Design. 2DOF Helicopter 3DOF Helicopter 3DOF Hover 3DOF Gyroscope. Quanser Education Solutions Powered by
 QUANSER Flight Control Systems Design 2DOF Helicopter 3DOF Helicopter 3DOF Hover 3DOF Gyroscope Quanser Education Solutions Powered by 2 DOF Helicopter What does it represent? Classic helicopter with main
QUANSER Flight Control Systems Design 2DOF Helicopter 3DOF Helicopter 3DOF Hover 3DOF Gyroscope Quanser Education Solutions Powered by 2 DOF Helicopter What does it represent? Classic helicopter with main
SOEM 024: Computer Aided Design. E. Rozos
 SOEM 024: Computer Aided Design E. Rozos Lesson structure Construct 3D objects with revolving WCS UCS Master plotting Realism Geometrical analysis Stress analysis Kinematics dynamic simulation Revolve,
SOEM 024: Computer Aided Design E. Rozos Lesson structure Construct 3D objects with revolving WCS UCS Master plotting Realism Geometrical analysis Stress analysis Kinematics dynamic simulation Revolve,
Using RecurDyn. Contents
 Using RecurDyn Contents 1.0 Multibody Dynamics Overview... 2 2.0 Multibody Dynamics Applications... 3 3.0 What is RecurDyn and how is it different?... 4 4.0 Types of RecurDyn Analysis... 5 5.0 MBD Simulation
Using RecurDyn Contents 1.0 Multibody Dynamics Overview... 2 2.0 Multibody Dynamics Applications... 3 3.0 What is RecurDyn and how is it different?... 4 4.0 Types of RecurDyn Analysis... 5 5.0 MBD Simulation
Rotational3D Efficient modelling of 3D effects in rotational mechanics
 Rotational3D - Efficient Modelling of 3D Effects in Rotational Mechanics Rotational3D Efficient modelling of 3D effects in rotational mechanics Johan Andreasson Magnus Gäfvert Modelon AB Ideon Science
Rotational3D - Efficient Modelling of 3D Effects in Rotational Mechanics Rotational3D Efficient modelling of 3D effects in rotational mechanics Johan Andreasson Magnus Gäfvert Modelon AB Ideon Science
Flexible Multibody Systems with Abaqus
 Day 1 Lecture 1: of Mechanisms and Multibodies in Abaqus Lecture 2: Connection Elements and Connection Library (Part 1) Workshop 1: Hinge Connection Lecture 3: Connection Elements and Connection Library
Day 1 Lecture 1: of Mechanisms and Multibodies in Abaqus Lecture 2: Connection Elements and Connection Library (Part 1) Workshop 1: Hinge Connection Lecture 3: Connection Elements and Connection Library
8 Tutorial: The Slider Crank Mechanism
 8 Tutorial: The Slider Crank Mechanism Multi-Body Simulation With MotionView / MotionSolve 12.0 written by Dipl.-Ing. (FH) Markus Kriesch and Dipl.-Ing. (FH) André Wehr, Germany Note: Some MBD fundamentals
8 Tutorial: The Slider Crank Mechanism Multi-Body Simulation With MotionView / MotionSolve 12.0 written by Dipl.-Ing. (FH) Markus Kriesch and Dipl.-Ing. (FH) André Wehr, Germany Note: Some MBD fundamentals
What Is SimMechanics?
 SimMechanics 1 simulink What Is Simulink? Simulink is a tool for simulating dynamic systems with a graphical interface specially developed for this purpose. Physical Modeling runs within the Simulink environment
SimMechanics 1 simulink What Is Simulink? Simulink is a tool for simulating dynamic systems with a graphical interface specially developed for this purpose. Physical Modeling runs within the Simulink environment
Design and Dynamic Analysis of Wind Turbine Blade
 Design and Dynamic Analysis of Wind Turbine Blade T.Krishnamurthy *, Y.Sesharao # PG Student, Department of Mechanical Engineering, QIS College of Engineering & Technology, Ongole, India * Professor, Department
Design and Dynamic Analysis of Wind Turbine Blade T.Krishnamurthy *, Y.Sesharao # PG Student, Department of Mechanical Engineering, QIS College of Engineering & Technology, Ongole, India * Professor, Department
MINISTAB SYSTEM DESCRIPTION
 MINISTAB SYSTEM DESCRIPTION Quote From Grampaw Pettibone: When you are flying a helicopter with an AFCS, you re not flying the helicopter you are flying the AFCS! The sooner you learn that, the sooner
MINISTAB SYSTEM DESCRIPTION Quote From Grampaw Pettibone: When you are flying a helicopter with an AFCS, you re not flying the helicopter you are flying the AFCS! The sooner you learn that, the sooner
Crashbox Tutorial. In this tutorial the focus is on modeling a Formula Student Racecar Crashbox with HyperCrash 12.0
 Crashbox Tutorial In this tutorial the focus is on modeling a Formula Student Racecar Crashbox with HyperCrash 12.0 (Written by Moritz Guenther, student at Altair Engineering GmbH) 1 HyperMesh* 1. Start
Crashbox Tutorial In this tutorial the focus is on modeling a Formula Student Racecar Crashbox with HyperCrash 12.0 (Written by Moritz Guenther, student at Altair Engineering GmbH) 1 HyperMesh* 1. Start
Estimating Vertical Drag on Helicopter Fuselage during Hovering
 Estimating Vertical Drag on Helicopter Fuselage during Hovering A. A. Wahab * and M.Hafiz Ismail ** Aeronautical & Automotive Dept., Faculty of Mechanical Engineering, Universiti Teknologi Malaysia, 81310
Estimating Vertical Drag on Helicopter Fuselage during Hovering A. A. Wahab * and M.Hafiz Ismail ** Aeronautical & Automotive Dept., Faculty of Mechanical Engineering, Universiti Teknologi Malaysia, 81310
FINITE ELEMENT MULTIBODY MODELING OF ROTORCRAFT SYSTEMS Carlo L. Bottasso Dipartimento di Ingegneria Aerospaziale, Politecnico di Milano, Milano, Ital
 FINITE ELEMENT MULTIBODY MODELING OF ROTORCRAFT SYSTEMS Carlo L. Bottasso Dipartimento di Ingegneria Aerospaziale, Politecnico di Milano, Milano, Italy Olivier A. Bauchau, Georgia Institute of Technology,
FINITE ELEMENT MULTIBODY MODELING OF ROTORCRAFT SYSTEMS Carlo L. Bottasso Dipartimento di Ingegneria Aerospaziale, Politecnico di Milano, Milano, Italy Olivier A. Bauchau, Georgia Institute of Technology,
Modeling and Control of a Simulated Flight of a Mini Helicopter Using Matlab/Simulink
 International Conference on Computer, Communications and Information Technology (CCIT 2014) Modeling and Control of a Simulated Flight of a Mini Helicopter Using Matlab/Simulink Mohamed Yacine Chachou,
International Conference on Computer, Communications and Information Technology (CCIT 2014) Modeling and Control of a Simulated Flight of a Mini Helicopter Using Matlab/Simulink Mohamed Yacine Chachou,
Lecture VI: Constraints and Controllers. Parts Based on Erin Catto s Box2D Tutorial
 Lecture VI: Constraints and Controllers Parts Based on Erin Catto s Box2D Tutorial Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a
Lecture VI: Constraints and Controllers Parts Based on Erin Catto s Box2D Tutorial Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a
CFD simulation of a 2 bladed multi megawatt wind turbine with flexible rotor connection
 Journal of Physics: Conference Series PAPER OPEN ACCESS CFD simulation of a 2 bladed multi megawatt wind turbine with flexible rotor connection To cite this article: L Klein et al 2016 J. Phys.: Conf.
Journal of Physics: Conference Series PAPER OPEN ACCESS CFD simulation of a 2 bladed multi megawatt wind turbine with flexible rotor connection To cite this article: L Klein et al 2016 J. Phys.: Conf.
Lesson 1: Introduction to Pro/MECHANICA Motion
 Lesson 1: Introduction to Pro/MECHANICA Motion 1.1 Overview of the Lesson The purpose of this lesson is to provide you with a brief overview of Pro/MECHANICA Motion, also called Motion in this book. Motion
Lesson 1: Introduction to Pro/MECHANICA Motion 1.1 Overview of the Lesson The purpose of this lesson is to provide you with a brief overview of Pro/MECHANICA Motion, also called Motion in this book. Motion
NUMERICAL ANALYSIS OF ROLLER BEARING
 Applied Computer Science, vol. 12, no. 1, pp. 5 16 Submitted: 2016-02-09 Revised: 2016-03-03 Accepted: 2016-03-11 tapered roller bearing, dynamic simulation, axial load force Róbert KOHÁR *, Frantisek
Applied Computer Science, vol. 12, no. 1, pp. 5 16 Submitted: 2016-02-09 Revised: 2016-03-03 Accepted: 2016-03-11 tapered roller bearing, dynamic simulation, axial load force Róbert KOHÁR *, Frantisek
NV-TECH-Design: Scalable Automatic Modal Hammer (SAM) for accurate, repeatable structural dynamics testing
 for accurate, repeatable structural dynamics testing") NV-TECH-Design: Automatic Modal Hammer (SAM) for accurate, repeatable structural dynamics testing Figure 1: NV-TECH-Design Automatic Modal Hammer (SAM) for structural testing (Patent pending). Modal Testing
NV-TECH-Design: Automatic Modal Hammer (SAM) for accurate, repeatable structural dynamics testing Figure 1: NV-TECH-Design Automatic Modal Hammer (SAM) for structural testing (Patent pending). Modal Testing
solidthinking Design Release Notes
 solidthinking Design 2017.2 Release Notes The solidthinking Design package includes Inspire and Evolve 2017.2. Inspire is available on Windows, while Evolve is available on Windows and Mac. solidthinking
solidthinking Design 2017.2 Release Notes The solidthinking Design package includes Inspire and Evolve 2017.2. Inspire is available on Windows, while Evolve is available on Windows and Mac. solidthinking
Robotics kinematics and Dynamics
 Robotics kinematics and Dynamics C. Sivakumar Assistant Professor Department of Mechanical Engineering BSA Crescent Institute of Science and Technology 1 Robot kinematics KINEMATICS the analytical study
Robotics kinematics and Dynamics C. Sivakumar Assistant Professor Department of Mechanical Engineering BSA Crescent Institute of Science and Technology 1 Robot kinematics KINEMATICS the analytical study
A simple example. Assume we want to find the change in the rotation angles to get the end effector to G. Effect of changing s
 CENG 732 Computer Animation This week Inverse Kinematics (continued) Rigid Body Simulation Bodies in free fall Bodies in contact Spring 2006-2007 Week 5 Inverse Kinematics Physically Based Rigid Body Simulation
CENG 732 Computer Animation This week Inverse Kinematics (continued) Rigid Body Simulation Bodies in free fall Bodies in contact Spring 2006-2007 Week 5 Inverse Kinematics Physically Based Rigid Body Simulation
Orbital forming of SKF's hub bearing units
 Orbital forming of SKF's hub bearing units Edin Omerspahic 1, Johan Facht 1, Anders Bernhardsson 2 1 Manufacturing Development Centre, AB SKF 2 DYNAmore Nordic 1 Background Orbital forming is an incremental
Orbital forming of SKF's hub bearing units Edin Omerspahic 1, Johan Facht 1, Anders Bernhardsson 2 1 Manufacturing Development Centre, AB SKF 2 DYNAmore Nordic 1 Background Orbital forming is an incremental
SIMULATION ENVIRONMENT PROPOSAL, ANALYSIS AND CONTROL OF A STEWART PLATFORM MANIPULATOR
 SIMULATION ENVIRONMENT PROPOSAL, ANALYSIS AND CONTROL OF A STEWART PLATFORM MANIPULATOR Fabian Andres Lara Molina, Joao Mauricio Rosario, Oscar Fernando Aviles Sanchez UNICAMP (DPM-FEM), Campinas-SP, Brazil,
SIMULATION ENVIRONMENT PROPOSAL, ANALYSIS AND CONTROL OF A STEWART PLATFORM MANIPULATOR Fabian Andres Lara Molina, Joao Mauricio Rosario, Oscar Fernando Aviles Sanchez UNICAMP (DPM-FEM), Campinas-SP, Brazil,
Altair HyperWorks: A Platform for Innovation. Vladimir Obukhov Technical Consultant Altair Engineering GmbH
 Altair HyperWorks: A Platform for Innovation Vladimir Obukhov Technical Consultant Altair Engineering GmbH HyperWorks Desktop Integration Typical FEA Process IMPORT FROM CAD or CAE World CAD CAE 1) GEOMETRY
Altair HyperWorks: A Platform for Innovation Vladimir Obukhov Technical Consultant Altair Engineering GmbH HyperWorks Desktop Integration Typical FEA Process IMPORT FROM CAD or CAE World CAD CAE 1) GEOMETRY
A MECHATRONIC APPROACH OF THE WINDSHIELD WIPER MECHANISMS
 A MECHATRONIC APPROACH OF THE WINDSHIELD WIPER MECHANISMS Alexandru Cătălin Transilvania University of Braşov calex@unitbv.ro Keywords: windshield wiper mechanism, dynamic simulation, control system, virtual
A MECHATRONIC APPROACH OF THE WINDSHIELD WIPER MECHANISMS Alexandru Cătălin Transilvania University of Braşov calex@unitbv.ro Keywords: windshield wiper mechanism, dynamic simulation, control system, virtual
Week 12 - Lecture Mechanical Event Simulation. ME Introduction to CAD/CAE Tools
 Week 12 - Lecture Mechanical Event Simulation Lecture Topics Mechanical Event Simulation Overview Additional Element Types Joint Component Description General Constraint Refresh Mesh Control Force Estimation
Week 12 - Lecture Mechanical Event Simulation Lecture Topics Mechanical Event Simulation Overview Additional Element Types Joint Component Description General Constraint Refresh Mesh Control Force Estimation
City, University of London Institutional Repository
 City Research Online City, University of London Institutional Repository Citation: Castillo-Rivera, S. & Tomas-Rodriguez, M. (2016). Helicopter nonlinear aerodynamics modelling using VehicleSim. Advances
City Research Online City, University of London Institutional Repository Citation: Castillo-Rivera, S. & Tomas-Rodriguez, M. (2016). Helicopter nonlinear aerodynamics modelling using VehicleSim. Advances
Kinematics of Machines. Brown Hills College of Engineering & Technology
 Introduction: mechanism and machines, kinematic links, kinematic pairs, kinematic chains, plane and space mechanism, kinematic inversion, equivalent linkages, four link planar mechanisms, mobility and
Introduction: mechanism and machines, kinematic links, kinematic pairs, kinematic chains, plane and space mechanism, kinematic inversion, equivalent linkages, four link planar mechanisms, mobility and
ME Week 11 Create Joints Project
 One of the most important elements of dynamic simulation is setting up and verifying that proper joints are created. Joints are links between two rigid components that applies force from the first component
One of the most important elements of dynamic simulation is setting up and verifying that proper joints are created. Joints are links between two rigid components that applies force from the first component
Deployment and Latching Simulation of Large Reflectors
 Deployment and Latching Simulation of Large Reflectors Sidharth Tiwary [1], B. Lakshmi Narayana [1], B.P. Nagaraj [1], G. Nagesh [2] and C.D. Sridhara [3] [1] Engineer, SMG [2] Project Director, Chandrayaan-2,
Deployment and Latching Simulation of Large Reflectors Sidharth Tiwary [1], B. Lakshmi Narayana [1], B.P. Nagaraj [1], G. Nagesh [2] and C.D. Sridhara [3] [1] Engineer, SMG [2] Project Director, Chandrayaan-2,
Camera gimbal control system for unmanned platforms
 8 th International Symposium Topical Problems in the Field of Electrical and Power Engineering Pärnu, Estonia, January 11-16, 2010 Camera gimbal control system for unmanned platforms Kristjan Tiimus, Mart
8 th International Symposium Topical Problems in the Field of Electrical and Power Engineering Pärnu, Estonia, January 11-16, 2010 Camera gimbal control system for unmanned platforms Kristjan Tiimus, Mart
Lecture VI: Constraints and Controllers
 Lecture VI: Constraints and Controllers Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a chair human body parts trigger of a gun opening
Lecture VI: Constraints and Controllers Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a chair human body parts trigger of a gun opening
Structural Configurations of Manipulators
 Structural Configurations of Manipulators 1 In this homework, I have given information about the basic structural configurations of the manipulators with the concerned illustrations. 1) The Manipulator
Structural Configurations of Manipulators 1 In this homework, I have given information about the basic structural configurations of the manipulators with the concerned illustrations. 1) The Manipulator
Olivier Brüls. Department of Aerospace and Mechanical Engineering University of Liège
 Fully coupled simulation of mechatronic and flexible multibody systems: An extended finite element approach Olivier Brüls Department of Aerospace and Mechanical Engineering University of Liège o.bruls@ulg.ac.be
Fully coupled simulation of mechatronic and flexible multibody systems: An extended finite element approach Olivier Brüls Department of Aerospace and Mechanical Engineering University of Liège o.bruls@ulg.ac.be
4 th Wind and Drivetrain Conference
 4 th Wind and Drivetrain Conference Multibody Simulation in Wind Energy From Turbine Design to Detailed Component Load Calculation Daniel Matzke, M. Sc. A. Werkmeister, A. Baseer, S. Leupold, T. Duda,
4 th Wind and Drivetrain Conference Multibody Simulation in Wind Energy From Turbine Design to Detailed Component Load Calculation Daniel Matzke, M. Sc. A. Werkmeister, A. Baseer, S. Leupold, T. Duda,
DYNAMICS OF A VORTEX RING AROUND A MAIN ROTOR HELICOPTER
 DYNAMICS OF A VORTEX RING AROUND A MAIN ROTOR HELICOPTER Katarzyna Surmacz Instytut Lotnictwa Keywords: VORTEX RING STATE, HELICOPTER DESCENT, NUMERICAL ANALYSIS, FLOW VISUALIZATION Abstract The main goal
DYNAMICS OF A VORTEX RING AROUND A MAIN ROTOR HELICOPTER Katarzyna Surmacz Instytut Lotnictwa Keywords: VORTEX RING STATE, HELICOPTER DESCENT, NUMERICAL ANALYSIS, FLOW VISUALIZATION Abstract The main goal
Dynamics Response of Spatial Parallel Coordinate Measuring Machine with Clearances
 Sensors & Transducers 2013 by IFSA http://www.sensorsportal.com Dynamics Response of Spatial Parallel Coordinate Measuring Machine with Clearances Yu DENG, Xiulong CHEN, Suyu WANG Department of mechanical
Sensors & Transducers 2013 by IFSA http://www.sensorsportal.com Dynamics Response of Spatial Parallel Coordinate Measuring Machine with Clearances Yu DENG, Xiulong CHEN, Suyu WANG Department of mechanical
Model and simulation of the AS350B1 helicopter
 Degree Project in Aerospace engineering Naïs FARGETTE Model and simulation of the AS350B1 helicopter By Naïs FARGETTE nais@kth.se February 2016 July 2016 KTH supervisor: David ELLER drl@kth.se ONERA supervisor:
Degree Project in Aerospace engineering Naïs FARGETTE Model and simulation of the AS350B1 helicopter By Naïs FARGETTE nais@kth.se February 2016 July 2016 KTH supervisor: David ELLER drl@kth.se ONERA supervisor:
CAD-BASED WORKFLOWS. VSP Workshop 2017
 CAD-BASED WORKFLOWS VSP Workshop 2017 RESEARCH IN FLIGHT COMPANY Established 2012 Primary functions are the development, marketing and support of FlightStream and the development of aerodynamic solutions
CAD-BASED WORKFLOWS VSP Workshop 2017 RESEARCH IN FLIGHT COMPANY Established 2012 Primary functions are the development, marketing and support of FlightStream and the development of aerodynamic solutions
FE Analysis Of Runner Blade For Small Bulb Turbine
 IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE) e-issn: 2278-1684,p-ISSN: 2320-334X, Volume 11, Issue 2 Ver.VI I (Mar- Apr. 2014), PP 73-77 FE Analysis Of Runner Blade For Small Bulb Turbine
IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE) e-issn: 2278-1684,p-ISSN: 2320-334X, Volume 11, Issue 2 Ver.VI I (Mar- Apr. 2014), PP 73-77 FE Analysis Of Runner Blade For Small Bulb Turbine
This week. CENG 732 Computer Animation. Warping an Object. Warping an Object. 2D Grid Deformation. Warping an Object.
 CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
Chapter 1 Introduction
 Chapter 1 Introduction Generally all considerations in the force analysis of mechanisms, whether static or dynamic, the links are assumed to be rigid. The complexity of the mathematical analysis of mechanisms
Chapter 1 Introduction Generally all considerations in the force analysis of mechanisms, whether static or dynamic, the links are assumed to be rigid. The complexity of the mathematical analysis of mechanisms
Table of Contents Introduction Historical Review of Robotic Orienting Devices Kinematic Position Analysis Instantaneous Kinematic Analysis
 Table of Contents 1 Introduction 1 1.1 Background in Robotics 1 1.2 Robot Mechanics 1 1.2.1 Manipulator Kinematics and Dynamics 2 1.3 Robot Architecture 4 1.4 Robotic Wrists 4 1.5 Origins of the Carpal
Table of Contents 1 Introduction 1 1.1 Background in Robotics 1 1.2 Robot Mechanics 1 1.2.1 Manipulator Kinematics and Dynamics 2 1.3 Robot Architecture 4 1.4 Robotic Wrists 4 1.5 Origins of the Carpal
MACHINES AND MECHANISMS
 MACHINES AND MECHANISMS APPLIED KINEMATIC ANALYSIS Fourth Edition David H. Myszka University of Dayton PEARSON ж rentice Hall Pearson Education International Boston Columbus Indianapolis New York San Francisco
MACHINES AND MECHANISMS APPLIED KINEMATIC ANALYSIS Fourth Edition David H. Myszka University of Dayton PEARSON ж rentice Hall Pearson Education International Boston Columbus Indianapolis New York San Francisco
Mechanism Kinematics and Dynamics
 Mechanism Kinematics and Dynamics Final Project 1. The window shield wiper For the window wiper, (1). Select the length of all links such that the wiper tip X p (t) can cover a 120 cm window width. (2).
Mechanism Kinematics and Dynamics Final Project 1. The window shield wiper For the window wiper, (1). Select the length of all links such that the wiper tip X p (t) can cover a 120 cm window width. (2).
Chapter 5 Modeling and Simulation of Mechanism
 Chapter 5 Modeling and Simulation of Mechanism In the present study, KED analysis of four bar planar mechanism using MATLAB program and ANSYS software has been carried out. The analysis has also been carried
Chapter 5 Modeling and Simulation of Mechanism In the present study, KED analysis of four bar planar mechanism using MATLAB program and ANSYS software has been carried out. The analysis has also been carried
LMS Virtual.Lab Motion Desktop
 Answers for industry LMS Virtual.Lab Motion Desktop [VL-MOT.80.1] 13.1 Benefits Gain insight in the kinematic and dynamic performance of a mechanism Increase product quality by efficient full system optimization
Answers for industry LMS Virtual.Lab Motion Desktop [VL-MOT.80.1] 13.1 Benefits Gain insight in the kinematic and dynamic performance of a mechanism Increase product quality by efficient full system optimization
Using three-dimensional CURVIC contact models to predict stress concentration effects in an axisymmetric model
 Boundary Elements XXVII 245 Using three-dimensional CURVIC contact models to predict stress concentration effects in an axisymmetric model J. J. Rencis & S. R. Pisani Department of Mechanical Engineering,
Boundary Elements XXVII 245 Using three-dimensional CURVIC contact models to predict stress concentration effects in an axisymmetric model J. J. Rencis & S. R. Pisani Department of Mechanical Engineering,
Cam makes a higher kinematic pair with follower. Cam mechanisms are widely used because with them, different types of motion can be possible.
 CAM MECHANISMS Cam makes a higher kinematic pair with follower. Cam mechanisms are widely used because with them, different types of motion can be possible. Cams can provide unusual and irregular motions
CAM MECHANISMS Cam makes a higher kinematic pair with follower. Cam mechanisms are widely used because with them, different types of motion can be possible. Cams can provide unusual and irregular motions
Lecture «Robot Dynamics»: Kinematics 3
 Lecture «Robot Dynamics»: Kinematics 3 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) office hour: LEE
Lecture «Robot Dynamics»: Kinematics 3 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) office hour: LEE
Multibody Dynamics Module
 Multibody Dynamics Module User s Guide VERSION 4.4 Multibody Dynamics Module User s Guide 1998 2013 COMSOL Protected by U.S. Patents 7,519,518; 7,596,474; 7,623,991; and 8,457,932. Patents pending. This
Multibody Dynamics Module User s Guide VERSION 4.4 Multibody Dynamics Module User s Guide 1998 2013 COMSOL Protected by U.S. Patents 7,519,518; 7,596,474; 7,623,991; and 8,457,932. Patents pending. This
10/25/2018. Robotics and automation. Dr. Ibrahim Al-Naimi. Chapter two. Introduction To Robot Manipulators
 Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
NAVAL POSTGRADUATE SCHOOL Monterey, California THESIS DEVELOPMENT OF A MYKLESTAD S ROTOR BLADE DYNAMIC ANALYSIS CODE FOR APPLICATION TO JANRAD
 NAVAL POSTGRADUATE SCHOOL Monterey, California THESIS DEVELOPMENT OF A MYKLESTAD S ROTOR BLADE DYNAMIC ANALYSIS CODE FOR APPLICATION TO JANRAD by Dogan Ozturk September 2002 Thesis Advisor: E. Roberts
NAVAL POSTGRADUATE SCHOOL Monterey, California THESIS DEVELOPMENT OF A MYKLESTAD S ROTOR BLADE DYNAMIC ANALYSIS CODE FOR APPLICATION TO JANRAD by Dogan Ozturk September 2002 Thesis Advisor: E. Roberts
THRUSTER ORIENTATION MECHANISM. Sami Mankaï
 THRUSTER ORIENTATION MECHANISM Sami Mankaï Alcatel space industries 100 Boulevard du Midi, BP 99-06156 Cannes la Bocca Cedex Telephone : 33-(0)4-92-92-79-76 / Fax : 33-(0)4-92-92-60-20 E-mail : sami.mankai@space.alcatel.fr
THRUSTER ORIENTATION MECHANISM Sami Mankaï Alcatel space industries 100 Boulevard du Midi, BP 99-06156 Cannes la Bocca Cedex Telephone : 33-(0)4-92-92-79-76 / Fax : 33-(0)4-92-92-60-20 E-mail : sami.mankai@space.alcatel.fr
Design and Research on Mechanism of Bionic Flapping-wing Air Vehicle
 Vol.8, No.4 (2015), pp. 299-306 http://dx.doi.org/10.14257/ijhit.2015.8.4.31 Design and Research on Mechanism of Bionic Flapping-wing Air Vehicle Yang Yonggang, Xie Youzeng and Huo Lipeng School of Aeronautics
Vol.8, No.4 (2015), pp. 299-306 http://dx.doi.org/10.14257/ijhit.2015.8.4.31 Design and Research on Mechanism of Bionic Flapping-wing Air Vehicle Yang Yonggang, Xie Youzeng and Huo Lipeng School of Aeronautics
Aircraft Stability and Performance 2nd Year, Aerospace Engineering. Dr. M. Turner
 Aircraft Stability and Performance 2nd Year, Aerospace Engineering Dr. M. Turner Basic Info Timetable 15.00-16.00 Monday ENG LT1 16.00-17.00 Monday ENG LT1 Typical structure of lectures Part 1 Theory Part
Aircraft Stability and Performance 2nd Year, Aerospace Engineering Dr. M. Turner Basic Info Timetable 15.00-16.00 Monday ENG LT1 16.00-17.00 Monday ENG LT1 Typical structure of lectures Part 1 Theory Part
Advanced Computation in the design and development of aircraft engines. Serge Eury SNECMA
 Advanced Computation in the design and development of aircraft engines 1 Serge Eury SNECMA Advanced Computation in the design and development of aircraft engines Introduction Some examples Conclusions
Advanced Computation in the design and development of aircraft engines 1 Serge Eury SNECMA Advanced Computation in the design and development of aircraft engines Introduction Some examples Conclusions
Motion Analysis Case Study
 Motion Analysis Case Study Very often, complex motions are desired as part of a solution to some engineering problem. Machines and mechanisms are then designed to produce these motions. Motion generation
Motion Analysis Case Study Very often, complex motions are desired as part of a solution to some engineering problem. Machines and mechanisms are then designed to produce these motions. Motion generation
Kinematics of Machines Prof. A. K. Mallik Department of Mechanical Engineering Indian Institute of Technology, Kanpur. Module 10 Lecture 1
 Kinematics of Machines Prof. A. K. Mallik Department of Mechanical Engineering Indian Institute of Technology, Kanpur Module 10 Lecture 1 So far, in this course we have discussed planar linkages, which
Kinematics of Machines Prof. A. K. Mallik Department of Mechanical Engineering Indian Institute of Technology, Kanpur Module 10 Lecture 1 So far, in this course we have discussed planar linkages, which
MECHATRONICS SYSTEM ENGINEERING FOR CAE/CAD, MOTION CONTROL AND DESIGN OF VANE ACTUATORS FOR WATER ROBOT APPLICATIONS
 MECHATRONICS SYSTEM ENGINEERING FOR CAE/CAD, MOTION CONTROL AND DESIGN OF VANE ACTUATORS FOR WATER ROBOT APPLICATIONS Finn CONRAD and Francesco ROLI Department of Mechanical Engineering, Technical University
MECHATRONICS SYSTEM ENGINEERING FOR CAE/CAD, MOTION CONTROL AND DESIGN OF VANE ACTUATORS FOR WATER ROBOT APPLICATIONS Finn CONRAD and Francesco ROLI Department of Mechanical Engineering, Technical University
THE EFFECTS OF THE PLANFORM SHAPE ON DRAG POLAR CURVES OF WINGS: FLUID-STRUCTURE INTERACTION ANALYSES RESULTS
 March 18-20, 2013 THE EFFECTS OF THE PLANFORM SHAPE ON DRAG POLAR CURVES OF WINGS: FLUID-STRUCTURE INTERACTION ANALYSES RESULTS Authors: M.R. Chiarelli, M. Ciabattari, M. Cagnoni, G. Lombardi Speaker:
March 18-20, 2013 THE EFFECTS OF THE PLANFORM SHAPE ON DRAG POLAR CURVES OF WINGS: FLUID-STRUCTURE INTERACTION ANALYSES RESULTS Authors: M.R. Chiarelli, M. Ciabattari, M. Cagnoni, G. Lombardi Speaker:
CFD Simulation of a dry Scroll Vacuum Pump including Leakage Flows
 CFD Simulation of a dry Scroll Vacuum Pump including Leakage Flows Jan Hesse, Rainer Andres CFX Berlin Software GmbH, Berlin, Germany 1 Introduction Numerical simulation results of a dry scroll vacuum
CFD Simulation of a dry Scroll Vacuum Pump including Leakage Flows Jan Hesse, Rainer Andres CFX Berlin Software GmbH, Berlin, Germany 1 Introduction Numerical simulation results of a dry scroll vacuum
Applications. Human and animal motion Robotics control Hair Plants Molecular motion
 Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
Multidisciplinary Methodology For Control Surface Simulation. Mechanical Systems Installation Department - Alenia Aeronautica. Speaker: Luigi MORRONE
 Multidisciplinary Methodology For Control Surface Simulation Speaker: Luigi MORRONE Mechanical Systems Installation Department - Alenia Aeronautica MSC Software Italian User s s Conference Turin, October
Multidisciplinary Methodology For Control Surface Simulation Speaker: Luigi MORRONE Mechanical Systems Installation Department - Alenia Aeronautica MSC Software Italian User s s Conference Turin, October
Rigid Dynamic Analysis in Workbench
 Rigid Dynamic Analysis in Workbench 1-1 Introduction Rigid Dynamic Analysis: Calculates dynamic response of an assembly of rigid bodies. Can be used to study the kinematics of an assembly. Bodies are linked
Rigid Dynamic Analysis in Workbench 1-1 Introduction Rigid Dynamic Analysis: Calculates dynamic response of an assembly of rigid bodies. Can be used to study the kinematics of an assembly. Bodies are linked
Numerical Methods in Aerodynamics. Fluid Structure Interaction. Lecture 4: Fluid Structure Interaction
 Fluid Structure Interaction Niels N. Sørensen Professor MSO, Ph.D. Department of Civil Engineering, Alborg University & Wind Energy Department, Risø National Laboratory Technical University of Denmark
Fluid Structure Interaction Niels N. Sørensen Professor MSO, Ph.D. Department of Civil Engineering, Alborg University & Wind Energy Department, Risø National Laboratory Technical University of Denmark
Interactive Computer Graphics
 Interactive Computer Graphics Lecture 18 Kinematics and Animation Interactive Graphics Lecture 18: Slide 1 Animation of 3D models In the early days physical models were altered frame by frame to create
Interactive Computer Graphics Lecture 18 Kinematics and Animation Interactive Graphics Lecture 18: Slide 1 Animation of 3D models In the early days physical models were altered frame by frame to create
Appendix A Physiological Model of the Elbow in MATLAB/Simulink
 Appendix A Physiological Model of the Elbow in MATLAB/Simulink This section contains a complete description of the implementation of the physiological model of the elbow joint in the MATLAB/Simulink environment.
Appendix A Physiological Model of the Elbow in MATLAB/Simulink This section contains a complete description of the implementation of the physiological model of the elbow joint in the MATLAB/Simulink environment.
APPROACHING A RELIABLE PROCESS SIMULATION FOR THE VIRTUAL PRODUCT DEVELOPMENT
 APPROACHING A RELIABLE PROCESS SIMULATION FOR THE VIRTUAL PRODUCT DEVELOPMENT K. Kose, B. Rietman, D. Tikhomirov, N. Bessert INPRO GmbH, Berlin, Germany Summary In this paper an outline for a strategy
APPROACHING A RELIABLE PROCESS SIMULATION FOR THE VIRTUAL PRODUCT DEVELOPMENT K. Kose, B. Rietman, D. Tikhomirov, N. Bessert INPRO GmbH, Berlin, Germany Summary In this paper an outline for a strategy
Integrated Computational and Experimental Studies of Flapping-wing Micro Air Vehicle Aerodynamics
 Integrated Computational and Experimental Studies of Flapping-wing Micro Air Vehicle Aerodynamics Kevin Knowles, Peter Wilkins, Salman Ansari, Rafal Zbikowski Department of Aerospace, Power and Sensors
Integrated Computational and Experimental Studies of Flapping-wing Micro Air Vehicle Aerodynamics Kevin Knowles, Peter Wilkins, Salman Ansari, Rafal Zbikowski Department of Aerospace, Power and Sensors
Human Motion. Session Speaker Dr. M. D. Deshpande. AML2506 Biomechanics and Flow Simulation PEMP-AML2506
 AML2506 Biomechanics and Flow Simulation Day 02A Kinematic Concepts for Analyzing Human Motion Session Speaker Dr. M. D. Deshpande 1 Session Objectives At the end of this session the delegate would have
AML2506 Biomechanics and Flow Simulation Day 02A Kinematic Concepts for Analyzing Human Motion Session Speaker Dr. M. D. Deshpande 1 Session Objectives At the end of this session the delegate would have
THE 3D LIGHTWEIGHT OPTIMIZATION FOR HIGH LOADED PARTS CASE STUDY
 6 th International Conference Computational Mechanics and Virtual Engineering COMEC 2015 15-16 October 2015, Braşov, Romania THE 3D LIGHTWEIGHT OPTIMIZATION FOR HIGH LOADED PARTS CASE STUDY Gabriel. D.
6 th International Conference Computational Mechanics and Virtual Engineering COMEC 2015 15-16 October 2015, Braşov, Romania THE 3D LIGHTWEIGHT OPTIMIZATION FOR HIGH LOADED PARTS CASE STUDY Gabriel. D.
POLI tecnico. Lightweight design of the INNWIND.EU and AVATAR rotors through multidisciplinary
 Lightweight design of the INNWIND.EU and AVATAR rotors through multidisciplinary optimization algorithms POLI tecnico di MI lano A. Croce [1], L. Sartori [1], P. Bortolotti [2], C.L. Bottasso [2,1] [1]
Lightweight design of the INNWIND.EU and AVATAR rotors through multidisciplinary optimization algorithms POLI tecnico di MI lano A. Croce [1], L. Sartori [1], P. Bortolotti [2], C.L. Bottasso [2,1] [1]
Animations in Creo 3.0
 Animations in Creo 3.0 ME170 Part I. Introduction & Outline Animations provide useful demonstrations and analyses of a mechanism's motion. This document will present two ways to create a motion animation
Animations in Creo 3.0 ME170 Part I. Introduction & Outline Animations provide useful demonstrations and analyses of a mechanism's motion. This document will present two ways to create a motion animation
Vibration Analysis with SOLIDWORKS Simulation and SOLIDWORKS. Before you start 7
 i Table of contents Before you start 7 Notes on hands-on exercises and functionality of Simulation Prerequisites Selected terminology 1: Introduction to vibration analysis 10 Differences between a mechanism
i Table of contents Before you start 7 Notes on hands-on exercises and functionality of Simulation Prerequisites Selected terminology 1: Introduction to vibration analysis 10 Differences between a mechanism
Rotorcraft Icing Simulations and a CFD Analysis of Rotors in Hover/Rotor-Fuselage Interactions
 Rotorcraft Icing Simulations and a CFD Analysis of Rotors in Hover/Rotor-Fuselage Interactions M. Morelli, G. Gori, A. Guardone - Politecnico di Milano - Italy 17/09/2018 SAC Faye Storer, (2013), Royal
Rotorcraft Icing Simulations and a CFD Analysis of Rotors in Hover/Rotor-Fuselage Interactions M. Morelli, G. Gori, A. Guardone - Politecnico di Milano - Italy 17/09/2018 SAC Faye Storer, (2013), Royal
Recent developments in simulation, optimization and control of flexible multibody systems
 Recent developments in simulation, optimization and control of flexible multibody systems Olivier Brüls Department of Aerospace and Mechanical Engineering University of Liège o.bruls@ulg.ac.be Katholieke
Recent developments in simulation, optimization and control of flexible multibody systems Olivier Brüls Department of Aerospace and Mechanical Engineering University of Liège o.bruls@ulg.ac.be Katholieke
A 6DOF Motion Platform with Permanent Magnet Linear Motors
 Transactions on Electrical Engineering, Vol. 3 (), No. A DO Motion Platform with Permanent Magnet Linear Motors Evžen Thöndel Department of Electric Drives and Traction, Czech Technical University in Prague,
Transactions on Electrical Engineering, Vol. 3 (), No. A DO Motion Platform with Permanent Magnet Linear Motors Evžen Thöndel Department of Electric Drives and Traction, Czech Technical University in Prague,
Dynamic Analysis of Manipulator Arm for 6-legged Robot
 American Journal of Mechanical Engineering, 2013, Vol. 1, No. 7, 365-369 Available online at http://pubs.sciepub.com/ajme/1/7/42 Science and Education Publishing DOI:10.12691/ajme-1-7-42 Dynamic Analysis
American Journal of Mechanical Engineering, 2013, Vol. 1, No. 7, 365-369 Available online at http://pubs.sciepub.com/ajme/1/7/42 Science and Education Publishing DOI:10.12691/ajme-1-7-42 Dynamic Analysis
Motion Simulation and Mechanism Design with SOLIDWORKS Motion 2017
 Motion Simulation and Mechanism Design with SOLIDWORKS Motion 2017 Kuang-Hua Chang Ph.D. SDC P U B L I C AT I O N S Better Textbooks. Lower Prices. www.sdcpublications.com Powered by TCPDF (www.tcpdf.org)
Motion Simulation and Mechanism Design with SOLIDWORKS Motion 2017 Kuang-Hua Chang Ph.D. SDC P U B L I C AT I O N S Better Textbooks. Lower Prices. www.sdcpublications.com Powered by TCPDF (www.tcpdf.org)
Generative Part Structural Analysis Expert
 CATIA V5 Training Foils Generative Part Structural Analysis Expert Version 5 Release 19 September 2008 EDU_CAT_EN_GPE_FI_V5R19 About this course Objectives of the course Upon completion of this course
CATIA V5 Training Foils Generative Part Structural Analysis Expert Version 5 Release 19 September 2008 EDU_CAT_EN_GPE_FI_V5R19 About this course Objectives of the course Upon completion of this course
MODELING AND DYNAMIC ANALYSIS OF 6-DOF PARALLEL MANIPULATOR
 MODELING AND DYNAMIC ANALYSIS OF 6-DOF PARALLEL MANIPULATOR N Narayan Rao 1, T Ashok 2, Anup Kumar Tammana 3 1 Assistant Professor, Department of Mechanical Engineering, VFSTRU, Guntur, India. nandurerao@gmail.com
MODELING AND DYNAMIC ANALYSIS OF 6-DOF PARALLEL MANIPULATOR N Narayan Rao 1, T Ashok 2, Anup Kumar Tammana 3 1 Assistant Professor, Department of Mechanical Engineering, VFSTRU, Guntur, India. nandurerao@gmail.com
A novel fixed-azimuth blade-element real-time rotor simulation model: fabes
 A novel fixed-azimuth blade-element real-time rotor simulation model: fabes Miguel González Cuadrado The fabes model is a novel approach to blade-element real-time rotor simulation that, unlike traditional
A novel fixed-azimuth blade-element real-time rotor simulation model: fabes Miguel González Cuadrado The fabes model is a novel approach to blade-element real-time rotor simulation that, unlike traditional
Multi body simulations at ECN wind Coupling of ECN software
 Multi body simulations at ECN wind Coupling of ECN software Feike Savenije, Koen Boorsma www.ecn.nl Outline Introduction Aero-Module - modelling - validation - usage Control Design Tool Application - SIMPACK
Multi body simulations at ECN wind Coupling of ECN software Feike Savenije, Koen Boorsma www.ecn.nl Outline Introduction Aero-Module - modelling - validation - usage Control Design Tool Application - SIMPACK