Semantic Video Segmentation From Occlusion Relations Within a Convex Optimization Framework
|
|
|
- Norma Walker
- 6 years ago
- Views:
Transcription
1 Semantic Video Segmentation From Occlusion Relations Within a Convex Optimization Framework Brian Taylor, Alper Ayvaci, Avinash Ravichandran, and Stefano Soatto University of California, Los Angeles Honda Research Institute Abstract. We describe an approach to incorporate scene topology and semantics into pixel-level object detection and localization. Our method requires video to determine occlusion regions and thence local depth ordering, and any visual recognition scheme that provides a score at local image regions, for instance object detection probabilities. We set up a cost functional that incorporates occlusion cues induced by object boundaries, label consistency and recognition priors, and solve it using a convex optimization scheme. We show that our method improves localization accuracy of existing recognition approaches, or equivalently provides semantic labels to pixel-level localization and segmentation. 1 Introduction Object detection, recognition, and localization in images and video have occupied a large portion of the Computer Vision community in the last decade. Detection refers to the binary decision as to whether an object (or object class, as represented by a prior model or training set) is present in an image. A positive outcome for a specific object class provides an answer to the recognition (or categorization) task. Given that an object is present, localization, performed at each pixel 1, is the binary decision as to whether it back-projects onto an object in the scene having said object label. This is often referred to as semantic (image) segmentation. However, a key challenge in labeling a scene using only a single image lies in obtaining accurate object boundaries. Low-level segmentation schemes fall short when the object of interest is highly textured and semantic classifiers tend to bleed across image boundaries due to the support requirement for different features. Motivated by this limitation, existing methods have proposed to incorporate additional cues (e.g. object detectors) into the framework, extend the label consistency using higher order potentials or take advantage of temporal information by using video sequences. With video data, the temporal consistency between adjacent frames has often been used to smooth labeling errors at the individual frame level. However, video sequences can also provide strong cues for object boundaries. When objects or the camera move, they uncover portions of the scene that were previously hidden and obscure other portions that were previously visible from the viewer s perspective. These newly revealed/occluded regions in the image naturally co-occur with object boundaries and 1 This is unlike coarse localization that aims to determine a few location parameters, say position and scale of a bounding box
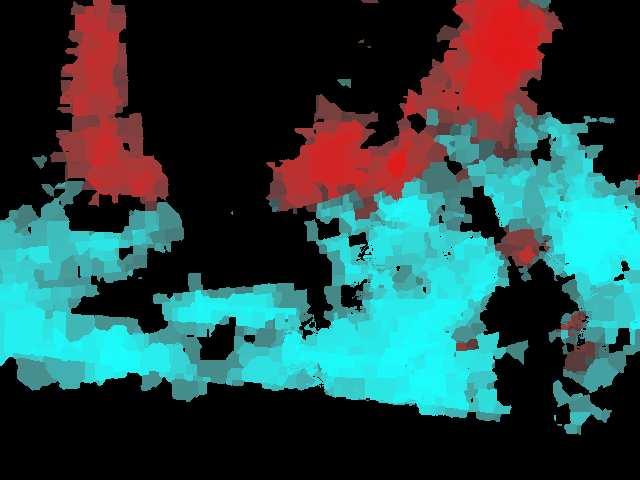
2 2 Brian Taylor, Alper Ayvaci, Avinash Ravichandran, Stefano Soatto thus provide constraints on the spatial distribution of class labels, since objects generally project to simply-connected regions of the image. With respect to the viewer, occlusion regions also provide local depth ordering relations between the occluder (in front) and the occluded (behind) objects. We exploit these relations, inferred from video, to produce a segmentation of the image domain into semantic class labels and depth ordering labels. We do so within a convex optimization framework that integrates low-level (scene topology), mid-level (label consistency), and high-level (semantic class label) priors in the inference process. The result can be seen as either a method for segmentation that provides class identity, or a method for recognition that provides accurate pixel-level localization (Fig. 1). 2 Related work Pixel-level labeling in single images has been well-studied, where conditional random fields (CRFs) have become a popular tool of choice [1,2,3,4]. Significant work has been accomplished since the introduction of TextonBoost [1], including the development of robust P N potentials [2] to model pixel relationships beyond pairwise constraints and their hierarchical extension [4], leading to considerable visual improvement in the labeling. Inference remains tractable as [2] showed that these higher order potentials can be reduced to pairwise terms and minimized using graph cuts. A number of methods incorporate additional cues into this framework, for example 3D information from stereo [5,6] or from structure from motion (SfM) [7]. An alternative is to add appearance-based geometric labels (i.e. vertical, horizontal, sky) [8], and a model for camera viewpoint [9], which can provide powerful constraints on the plausible locations of objects in the scene [10]. [11] takes advantage of powerful sliding window detectors [12,13] to facilitate the labeling of objects (e.g. cars, persons) as they project to smaller regions in the image than background classes (e.g. building, road, or sky), an issue our approach also addresses. Incorporating multiple cues facilitates [5,11,8,9] the joint optimization of coupled problems (e.g. semantic labels and depth estimates). To leverage temporal information from video, most existing work [14,15,6] enforces label consistenty in a temporal window to smooth the output labels. [14] leverages a spatial CRF with temporal information to independently model scene and object motion. Alternatively, label smoothing can be accomplished via a Hidden Markov Model [15] layered on top of classifier output. Recent work [6] enforces temporal consistency on labels by associating their 3D locations, estimated from stereo image-pairs, across frames. This approach works well for static environments, but struggles with reconstructing and labeling moving objects like cars and people. A related line of work is object segmentation in video, where temporal consistency can be exploited by matching sparse features across images [16]. Recent results [16,17,18] in unsupervised video object segmentation highlight the importance of using motion as a segmentation cue. Such methods can be adopted for semantic labeling by first segmenting the video sequence followed by labeling each segment. However, failures in the first step cannot be recovered at the categorization step. Our contributions can be summarized as follows: first, we propose a unified criterion (5) that incorporates categorical information, label consistency constraints, and low-level


3 Semantic Video Segmentation From Occlusion Relations 3 topological cues from occluded regions for the semantic segmentation task (Sect. 3). In addition to pixel-level object categorization, this approach also provides pixel-level layer labels. When objects of the same category occlude each other, instead of merely categorizing the union of their support as a single category, the layer label indicates the presence of multiple objects in that region and accurately localizes each instance at a pixel-level. This scenario is shown in Fig. 1. Second, we show that our optimization criterion can be converted into a linear program and solved efficiently (Sect. 4), once depth ordering constraints induced by occluded regions are provided. Such constraints can only be obtained using video data [19]. applica&on:*seman&c*labeling bo0om1up* object*detector object likelihoods car person semantic labels occlusion*detec&on occlusion cues layers Sunday, March 17, 13 Fig. 1. Object probabilities from class-specific detectors (top) and occlusion cues (bottom), with red and yellow indicating occluded and occluder regions. A single optimization solved efficiently with a linear program solver produces pixel-level classification. Our approach not only provides a semantic label ( person or background ) for each pixel (top right), but also determines there are two instances of the same object (bottom right), one occluding the other, where the person marked by yellow is behind the person marked by brown. 3 Formalization Given a video sequence I t : D R 2 R + ; x I t (x), t = 1... N, we are interested in determining whether an object of interest is present in the scene, where in the image it projects to, and the spatial relationship between different objects (e.g. multiple instances of the same class) with respect to the viewer. The resulting labeling is represented by a set of binary indicator functions u l : D {0, 1}; x u l (x) of the presence/absence of an object of category l L = {1, 2, 3,..., L} at location x D. Let I be the set of all possible images defined on the domain D and S = {s s R 2, (0, 0) s} be the set of regions centered at the origin. A detector for object l is a function f l : D I S [0, 1]; (x, I, s) f l (x, I, s) that yields the probability
4 4 Brian Taylor, Alper Ayvaci, Avinash Ravichandran, Stefano Soatto that object l projects onto a location x based on statistics of the image restricted to a neighborhood s of x: I {x+x x s}. Label consistency: In principle, we could run a detector for every pixel location x D independently of the outcome of detectors at other locations y D. Clearly, this would miss important correlations and spatial regularities that natural images exhibit. To take these into account, we enforce label consistency between neighboring locations x, y D by requiring that u l (x) u l (y) be small unless a data-dependent measure dµ(x, y) provides evidence of the contrary. Such a measure can be written in terms of a kernel dµ(x, y) = K(x, y)dxdy, where K(x, y) = e γ(it(x) It(y))2 if x y 2 < ɛ and 0 otherwise, where γ is a regularization parameter. Using the detector responses {f l (x)} L l=1 and the label consistency, instantaneous localization at time t (subscript omitted for simplicity) could be framed as the following optimization problem {û l } L l=1 = argmin α u 0...u L s. t. l=1 D u l (x) = 1, x D l=1 (1 f l (x))u l (x)dx + β l=1 D u l (x) u l (y) dµ(x, y) where α, β are tuning parameters. L l=1 ul (x) = 1 enforces that only a single object be present at each pixel (opacity). Topological (occlusion) constraints: Multiple images {I t } T t=1 provide more than just repeated trials to compute the likelihood in (1). They provide information on the topology of the surfaces in the scene. Under the assumption of Lambertian reflection, constant illumination and co-visibility, an image frame I t is related to its immediate neighbors I t+dt, I t dt by the usual brightness-constancy equation I t (x) = I t±dt (x + v ±t (x)) + n ± (x), x D\Ω ±t (2) where v +t and v t are the forward and backward motion fields [19]. However, in general, there are regions, occlusions and disocclusion, in the current image at time t that are not visible in the next and previous frames, Ω +t and Ω t. Let Ω t be Ω +t Ω t. Then Ω c t is the occluder, which can be restricted to a local region around the occluded regions Ω t by using morphological operations. The relation between Ω c t be Ω t induces an ordering between two neighboring surfaces where the occluder maintains a higher depth value (closer to camera) then the occluded one. One can enforce this ordering as a constraint to estimate a depth layer field c t = D Z + ; x c t (x) at time t, which maps each image location x to an integer indicating the depth order [20]. This allows us to handle multiple layers (see Fig. 1). Omitting the subscript t for simplicity, we can infer c by solving the minimization problem, ĉ = argmin c(x) c(y) dµ(x, y) c D s. t. c(x) > c(y), x Ω c, y Ω, x y < ε. (1) (3)
5 Semantic Video Segmentation From Occlusion Relations 5 The super-level set {x c(x) 1} is an indicator for simply-connected regions of the image called detachable objects [20]. We adopt this characterization of objects as label-consistent regions that do not violate occluding boundaries. As Fig. 1 shows, it is possible for an object of a given class to occlude another of the same class. Thus an occlusion boundary does not necessarily force a change of semantic label. Semantic priors: While labels obtained by solving (3) are consistent with the topology of the scene, there is nothing that couples them with object identity. Prior knowledge implicit in the training set, which could facilitate detection and localization, is ignored. We need to enable cross-talk between high-level (semantic) priors and low-level (topological) constraints, so that object hypotheses from the probabilistic detectors can inform occlusion-consistent segmentation and vice-versa. To this end, we can relate the label field to the object identity via c(x) l F u l (x), x D, (4) where F L denotes the set of foreground classes. This constraint not only implies that, when c(x) = 0, we obtain l F ul (x) = 0 based on the exclusion constraint L l=1 ul (x) = 1, but also encourages c(x) to become nonzero when there is a strong detector response for any object class. Unfortunately, we cannot add additional constraints between the layers and the object labels as any object can be present in any layer. With this constraint, we propose the following optimization problem: {û l } L l=1, ĉ = argmin α + s.t. u 0...u L,c D l=1 D c(x) c(y) dµ(x, y) u l (x) = 1, x D, l=1 (1 f l (x))u l (x)dx + β c(x) > c(y), x Ω c, y Ω, x y < ε c(x) l F u l (x). l=1 D u l (x) u l (y) dµ(x, y) This inference criterion incorporates high-level (category), mid-level (label consistency) and low-level (occlusion) information. In what follows, we show how the above minimization problem can be solved efficiently with linear programming. (5) 4 Implementation The domain D is a discrete lattice Λ of M N pixels, that we can represent as a graph G = (V, E): each pixel is identified with a node i in the vertex set V, and adjacency relationships between pixels i and j are encoded in the edge set E V V via i j.
6 6 Brian Taylor, Alper Ayvaci, Avinash Ravichandran, Stefano Soatto The location of each pixel i in the image is given by x i D. Abusing notation, we define discrete versions of the category indicator functions {u l : V {0, 1}; i u l i }L l=1, the layers c : V Z + ; i c i and the object detectors {f l : V [0, 1]; i fi l}l l=1 where each fi l is the probability of vertex i having semantic label l. By introducing auxiliary variables {d ij } i j and {v ij } i j and relaxing the integer constraints for {u l } L l=1 and c, we can write (5) as a linear program: {û l } L l=1, ĉ = argmin α (1 fi l )u l i + β v ij + d ij + µ K c i + λ ξ k u 1...u L,c l=1 i V l=1 i j i j i V k=1 }{{}}{{} φ semantic φ layers s. t. u l i = 1, x D, l=1 v Gu v, d Gc d c i c j 1 ξ k, x i Ω c, x j Ω, i j, c i u l i. l F where G is a E V matrix that acts as a weighted gradient operator on the functions defined on the graph G which is given by w ij, if k = i G i j,k = w ij, if k = j (7) 0, otherwise, and the measure dµ(x i, x j ) becomes a symmetric matrix w ij = K(x i, x j ). Also note that we incorporate model selection via i c i in (6) which penalizes spurious object layers. We also introduce a slack variable set {ξ k }, one for each of K occluder-occluded constraints on a pair of pixels, allowing us to ignore spurious occlusion constraints by paying a penalty λ. This enables us to deal with inevitable errors in occlusion detection. The formulation of the problem as a linear program enables us to benefit from efficient numerical solvers. Following common practice to reduce the complexity of the optimization, we partition the domain D into N non-overlapping superpixels {s i } N i=1 such that N i=1 s i = D, using a statistical multi-cue edge detector [21]. The form of the optimization (6) is unchanged, since it is already written for a general graph. This reduces the size of the linear program to a manageable complexity. (6) 5 Experiments We tested our model on video sequences from the MOSEG dataset [16] as well as the CamVid dataset [22]. MOSEG contains short sequences (20-60 frames) of moving
7 Semantic Video Segmentation From Occlusion Relations 7 objects such as cars and people with ground truth annotations for a few frames in each sequence. Since ground truth is only provided for moving objects, we exclude detection of stationary ones for evaluation purposes. For our framework, we choose cars and people to be the object classes and construct a generic background class. The CamVid database consists of longer clips of driving sequences taken under different conditions (e.g. day and dusk). The motion between adjacent frames is much larger than in MOSEG as the camera is mounted on a fast-moving platform. Annotations are provided sparsly at 1 Hz for 32 semantic classes. However, we train and test on only the 11 classes shown in Fig. 2 as common practice when evaluating on CamVid [7,11,23]. For our framework, we consider cars, sign-symbol, pedestrian, column-pole, and bicyclist as the object classes and building, tree, sky, road, fence, and sidewalk as the background classes. While our algorithm is designed to run on video, the categorization component only considers single image-based features. This is convenient as there exist many publicly available image categorization datasets with densely labeled annotations and a number of baseline evaluation methods to choose from. For our experiments with MOSEG, we construct three classes (car, person, background) from the Graz02 database [24]. We chose not to train on MOSEG as testing would then be trivial and limited given the small number of annotated frames. An advantage of our approach is that any single image semantic labeling scheme can be used as our baseline categorization method, so long as it provides per-class probability maps. For our experiments on MOSEG, we used [25] for our categorization component, a bag-of-features approach shown to perform well for single image recognition and localization on Graz02 and Pascal VOC 2007/2009 [26]. Dense SIFT features [27] are extracted and quantized via K-means (K = 400). A histogram of these quantized features is constructed for each superpixel, which aggregates information within a local superpixel neighborhood for training an SVM classifier with an intersection kernel. For our experiments on CamVid, we followed the dataset s default training and testing split. For the categorization component, we used [4] to run an improved version of TextonBoost that incorporates additional features such as Local Binary Patterns, colour histograms, location, and dense SIFT to obtain per-pixel object class probabilities. Occlusion detections and optical flow estimation are performed by [19], for which source code is available on-line. 5.1 Comparative evaluation MOSEG: We compared five approaches: (i) the baseline categorization component [25] applied to each frame of the video; (ii) TextonBoost which partitions still images into regions each labeled with a specific object class considering textural properties of objects [1]; (iii) the work of [4], which augments the pixel-wise graph cut labeling framework with label consistency relationships on image regions and across a segmentation hierarchy, (iv) the two-stage pipeline first partitioning the image into segments and then classifying each segment; and (v) the proposed approach that unifies the segmentation and classification steps into a single energy minimization framework. We accomplish method (i) by assigning each pixel to the class inferred from the detection probabilities under a CRF model enforcing spatial continuity. We use publicly

, labeling results from [1,4] (col.")

 2 and (iii) 3 [28].")









, which not only")
8 8 Brian Taylor, Alper Ayvaci, Avinash Ravichandran, Stefano Soatto Fig. 2. Results on CamVid sequences. (Left to right) original frame, ground truth annotations (col. 2), labeling results from [1,4] (col. 3, 4), and the output of our proposed method (col. 5). Notice how the proposed method better captures the boundaries of the cars (highlighted with white boxes). available code for (ii) 2 and (iii) 3 [28]. (iv) is accomplished by image segmentation from the depth layers estimated by [20] and labeling the connected components of all the depth layers using a bag-of-features classifier trained on the Graz dataset. (v) is our method. CamVid: We compare the baseline (TextonBoost with an augmented feature vector), the single image-labeling approach of [4], and our proposed method. Here we also enforce temporal consistency by connecting the class and layer nodes in each frame to those in the surrounding frames. This amounts to solving equation 6 on a larger graph. Thus we label multiple frames in one minimization. In our experiments, we used a 7 frame temporal window. 5.2 Qualitative performance Fig. 3 provides a basic intuition of our system. By combining the output of class-specific bottom-up object detectors and occlusion detectors (2nd and 3rd column, respectively), we can accurately segment and classify the vehicles (5th column), which not only improves on the baseline classifier in localization (2nd column), but also improves on lubor/
, detector responses for category car (cyan) and person (red) (col. 2), occluded (red) and occluder (yellow) regions (col.")

. In addition, our framework provides an object category label to each segmented image region.")

9 Semantic Video Segmentation From Occlusion Relations 9 Fig. 3. Our algorithm compared to baseline methods on cars5 (top row) and cars2 (bottom row) from MOSEG. Left to right: original image with groundtruth overlaid (col. 1), detector responses for category car (cyan) and person (red) (col. 2), occluded (red) and occluder (yellow) regions (col. 3), layer segmentation produced from occlusion cues (dark blue is the lowest layer and red is the highest) (col. 4), and finally our classification result (col. 5). Notice the classification baseline labels much of the image as car, while the layer segmentation often misses objects due to errors in occlusion detection. In the top row, the car is in the same layer as the background while the region immediately to its left is separated. In both examples, all approaches struggle with the moving car in the far field. the segmentation from occlusion cues alone (4th column). In addition, our framework provides an object category label to each segmented image region. In the first row, the left vehicle is difficult to extract via occlusion cues alone as too few are generated while the car is turning. By incorporating the response of a car detector, our algorithm is able to accurately recover the leftmost vehicle. We are still unable to extract the moving car in the background, however, as the detector response is not significant enough in this region. This shows the interplay between the two object localization approaches. However, in comparison to methods (i) and (ii), our approach improves on the results in the localization and classification of objects. It should be noted that our method not only produces a pixel-level localization, but also a global depth ordering, which partitions the image into a set of depth layers. Thus, if a person in the scene occludes another one, we do not merely label an amorphous region of pixels that responded to a person detector. Instead, the combination of the semantic label field and the depth layer distinguishes the individual object instances and indicates which person is in front of the other person in the scene from the viewer s perspective. This is visible in Fig. 1 for the case of people. The work of Yang et al. [29] similarly takes advantage of depth layers. However, their layers are based on the output of single image object detectors and shape priors. We instead used the motion of objects in the scene. We present qualitative results of our algorithm and the comparison methods evaluated on the MOSEG sequences in Fig. 5. Our algorithm consistently makes improvement over the labeling schemes for single images (the baseline [25], TextonBoost [1], and [4]), which is particularly evident at object boundaries. Thus, occlusion cues can help regularize the probabilities generated by the baseline detection system. Note that in the fourth column (person2), [4] fails around the head of the person. This is likely due to a failure in the oversegmentation step. With occlusion cues, our approach captures the
10 10 Brian Taylor, Alper Ayvaci, Avinash Ravichandran, Stefano Soatto silhouette of the woman s head. However, in this frame we fail to capture the woman in the background, as the person detection response is weak in that region. Note that where very small or very large motion occurs, occlusion detection fails. Despite these issues, our method still matches or outperforms the two-step pipeline approach, recovering from failures in layer estimation due to weak occlusion cues (the vehicle windshield is mislabeled as background in cars4) or spurious occlusion detections (cars9, cars8). Qualitative results of our algorithm and the comparison methods evaluated on frames from CamVid are presented in Fig. 2, where we compare the output of the extended version of TextonBoost, [4], and our proposed method. Although it is difficult to declare one approach as superior for labeling the background classes, our approach clearly obtains more accurate boundaries when considering foreground objects (here, cars), which we highlight with white boxes. In these sequences, the significant camera motion generates strong occlusion cues for accurate segmentation, where single image appearance features may lead to a faulty object segmentation (row 2). 5.3 Quantitative assessment Table 1 details the quantitative results of the comparison methods and our proposed algorithm. F-measure scores were computed for all of the annotated frames in MOSEG and averaged per sequence. The proposed algorithm outperforms the baseline and performs on par or better than the two-step approach. In a few cases, the recent method [4] performs better, particularly for sequences when the moving car is larger. Our algorithm falls short of the two step approach on person2, where the rear left woman is partially occluded while exiting the camera s field of view. We do not test our scheme on the Tennis and Marple sequences, since the annotated segmentations capture a range of scale and viewpoint that is not represented in Graz02, our training set. The results for the CamVid database are shown in Table 2. In most cases, we outperform [1,4], especially on the object categories (e.g. cars). Often, for applications such as autonomous driving, mislabeling a portion of sky as building is of much less consequence than mislabeling a person crossing the street as drive-able road. Given that object classes often have a much smaller spatial support in the image, the addition of occlusion cues help us to more reliably detect and accurately label the objects (e.g. cars, people, bicyclists). After pre-processing (occlusion detection and probability map generation), the optimization takes 2-3 minutes/frame in CVX [30,31] and approximately 15 seconds with MOSEK, a commercial tool. The entire pipeline including optical flow and occlusion detection, edge detection and categorization scheme followed by the minimization stage runs in 4.35 minutes for a frame. We use a GPU implementation of the optical flow estimation and run it on an NVIDIA GeForce GTX 560Ti, while the other stages are performed on a single core 2.5 Ghz CPU. In order to visualize the effects of the parameters, we obtained the minimizer of φ semantic + ωφ layers for different choices of ω. We fixed α and β and used ω to scale the other parameters i.e. ω, ωµ and ωλ. Fig. 4 illustrates the variation of the pixel-level classification accuracy as a function of ω. Note that the classification results remain constant over large intervals of ω. This shows that our approach is robust to reasonable perturbations in the parameters.

11 Semantic Video Segmentation From Occlusion Relations 11 F-measure ω Fig. 4. F-measure scores for pixel level classification results obtained by varying ω between 0.2 and 2. The F-measure remains constant for the intervals depicted in red, green and blue. Hence, we only show one exemplar solution from each interval Failure modes: Our method does not always work. In the case when the training set is not representative of the conditions to be encountered in the test set, unsurprisingly the semantic prior does not help improve segmentation. Our method is also susceptible to gross failures in occlusion detection, although it compensates for minor errors with the introduction of slack variables. We are also sensitive to failures of the low-level object detection module. Table 1. Performance results for [25,1,4], the two step segment-then-classify approach, and finally the proposed method on the MOSEG [16] dataset. Reported F-measure scores have been computed for the groundtruth class in each image and averaged over the sequence. In cars4, objects from classes People and Car both appear in the scene. Sequence cars1 cars2 cars3 cars4 cars5 cars6 cars7 cars8 cars9 cars10 person1 person2 Fulkerson et al. [25] TextonBoost [1] Ladicky [4] TwoStep Our Method Table 2. Performance results for [1,4] and the proposed method on CamVid [16]. F-measure scores were computed for each class and Average is the average of the F-measure scores. Bolded numbers show the best performance for the specified category. In general, our method performs better than comparison methods. In particular, note that the use of occlusion cues allows us to outperform the other methods in all but one object category. Class Building Tree Sky Road Fence Sidewalk Car Column-Pole Pedestrian Sign-Symbol Bicyclist Average TextonBoost* [1] Ladicky [4] Our Method
12 12 Brian Taylor, Alper Ayvaci, Avinash Ravichandran, Stefano Soatto 6 Discussion We have presented a method to integrate (low-level) local topology information from occlusions, (mid-level) label consistency, and (high-level) semantic information via object class detectors to provide pixel-level localization in object recognition, or equivalently to augment segmentation with object labels. We use existing occlusion detection methods to extract occlusion regions from video and thus provide local depth ordering constraints and existing object detection schemes to provide the probability of correct detection for a region of an image relative to a training set of objects or object classes. We incorporate all of these cues into a cost functional that we discretize and solve using modern combinatorial optimization schemes. Our approach improves localization performance of existing segmentation and recognition schemes, including those enforcing label consistency using conditional random fields or other generic priors. Acknowledgement: research supported by ONR N and ARO CI References 1. Shotton, J., Winn, J., Rother, C., Criminisi, A.: Textonboost: Joint appearance, shape and context modeling for multi-class object recognition and segmentation. In: Proc. of the European Conference on Computer Vision. (2006) 2. Kohli, P., Torr, L.L.P.H.S.: Robust higher order potentials for enforcing label consistency. International Journal of Computer Vision (2009) 3. Gould, S., Gao, T., Koller, D.: Region-based segmentation and object detection (2009) 4. Ladicky, L., Russell, C., Kohli, P., Torr, P.: Associative hierarchical CRFs for object class image segmentation. In: Proc. of the International Conference on Computer Vision. (2009) 5. Ladický, L., Sturgess, P., Russell, C., Sengupta, S., Bastanlar, Y., Clocksin, W., Torr, P.H.S.: Joint optimization for object class segmentation and dense stereo reconstruction. In: International Journal of Computer Vision. (2011) 6. Floros, G., Leibe, B.: Joint 2d-3d temporally consistent segmentation of street scenes. In: Proc. of the IEEE Conference on Computer Vision and Pattern Recognition. (2012) 7. Sturgess, P., Alahari, K., Ladický, L., Torr, P.H.: Combining appearance and structure from motion features for road scene understanding. In: British Machine Vision Conference. (2009) 8. Tighe, J., Lazebnik, S.: Superparsing: Scalable nonparametric image parsing with superpixels. International Journal of Computer Vision (2012) 9. Gould, S., Fulton, R., Koller, D.: Decomposing a scene into geometric and semantically consistent regions. In: Proc. of the International Conference on Computer Vision. (2009) 10. Hoiem, D., Efros, A.A., Hebert, M.: Putting objects in perspective. In: Proc. of the IEEE Conference on Computer Vision and Pattern Recognition. (2006) 11. Ladický, L., Sturgess, P., Alahari, K., Russell, C., Torr, P.H.S.: What, where and how many? combining object detectors and crfs. In: Proc. of the European Conference on Computer Vision. (2010) 12. Felzenszwalb, P.F., Girshick, R.B., McAllester, D., Ramanan, D.: Object detection with discriminatively trained part based models. IEEE Transactions on Pattern Analysis and Machine Intelligence (2010) 13. Vedaldi, A., Gulshan, V., Varma, M., Zisserman, A.: Multiple kernels for object detection. In: Proc. of the International Conference on Computer Vision. (2009) 14. Wojek, C., Schiele, B.: A dynamic conditional random field model for joint labeling of object and scene classes. In: Proc. of the European Conference on Computer Vision. (2008)
13 Semantic Video Segmentation From Occlusion Relations Ess, A., Mueller, T., Grabner, H., van Gool, L.: Segmentation-based urban traffic scene understanding. In: British Machine Vision Conference. (2009) 16. Brox, T., Malik, J.: Object segmentation by long term analysis of point trajectories. In: Proc. of the European Conference on Computer Vision. (2010) 17. Ochs, P., Brox, T.: Object segmentation in video: a hierarchical variational approach for turning point trajectories into dense regions. In: Proc. of the International Conference on Computer Vision. (2011) 18. Lee, Y.J., Kim, J., Grauman, K.: Key-segments for video object segmentation. In: Proc. of the International Conference on Computer Vision. (2011) 19. Ayvaci, A., Raptis, M., Soatto, S.: Occlusion detection and motion estimation with convex optimization. In: Advances in Neural Information Processing Systems. (2010) 20. Ayvaci, A., Soatto, S.: Detachable object detection with efficient model selection. In: Proc. of the International Conference on Energy Minimization Methods in Computer Vision and Pattern Recognition. (2011) 21. Martin, D., Fowlkes, C., Malik, J.: Learning to detect natural image boundaries using local brightness, color, and texture cues. IEEE Transactions on Pattern Analysis and Machine Intelligence (2004) 22. Brostow, G.J., Shotton, J., Fauqueur, J., Cipolla, R.: Segmentation and recognition using structure from motion point clouds. In: Proc. of the European Conference on Computer Vision. (2008) 23. Tighe, J., Lazebnik, S.: Understanding scenes on many levels. In: Proc. of the International Conference on Computer Vision. (2011) 24. Opelt, A., Pinz, A.: Object localization with boosting and weak supervision for generic object recognition. In: Proc. of the Scandinavian Conference on Image Analysis. (2005) 25. Fulkerson, B., Vedaldi, A., Soatto, S.: Class segmentation and object localization with superpixel neighborhoods. In: Proc. of the International Conference on Computer Vision. (2009) 26. Everingham, M., Van Gool, L., Williams, C.K.I., Winn, J., Zisserman, A.: The pascal visual object classes challenge (2011) 27. Lowe, D.: Distinctive image features from scale-invariant keypoints. International Journal of Computer Vision (2004) 28. Boykov, Y., Kolmogorov, V.: An experimental comparison of min-cut/max-flow algorithms for energy minimization in vision. In: IEEE Transactions on Pattern Analysis and Machine Intelligence. (2004) 29. Yang, Y., Hallman, S., Ramanan, D., Fowlkes, C.C.: Layered object models for image segmentation. IEEE Transactions on Pattern Analysis and Machine Intelligence (2011) 30. Grant, M., Boyd, S.: CVX: Matlab software for disciplined convex programming, version 1.21 (2011) 31. Grant, M., Boyd, S.: Graph implementations for nonsmooth convex programs. In: Recent Advances in Learning and Control. Springer-Verlag Limited (2008)

















14 14 Brian Taylor, Alper Ayvaci, Avinash Ravichandran, Stefano Soatto Fig. 5. Results on (left to right) cars{9,10,4}, and person2 from MOSEG. (Row 1) Original frame. (Row 2) Ground truth for cars (blue), person (red), and masked regions (gray). (Row 3) Object probabilities from the baseline [25]. (Rows 4,5,6) Results of [25,1,4], respectively, with masked regions in yellow. (Row 7) Segment-then-classify approach. (Row 8) Proposed method
Segmentation. Bottom up Segmentation Semantic Segmentation
 Segmentation Bottom up Segmentation Semantic Segmentation Semantic Labeling of Street Scenes Ground Truth Labels 11 classes, almost all occur simultaneously, large changes in viewpoint, scale sky, road,
Segmentation Bottom up Segmentation Semantic Segmentation Semantic Labeling of Street Scenes Ground Truth Labels 11 classes, almost all occur simultaneously, large changes in viewpoint, scale sky, road,
Multi-Class Image Labeling with Top-Down Segmentation and Generalized Robust P N Potentials
 FLOROS ET AL.: MULTI-CLASS IMAGE LABELING WITH TOP-DOWN SEGMENTATIONS 1 Multi-Class Image Labeling with Top-Down Segmentation and Generalized Robust P N Potentials Georgios Floros 1 floros@umic.rwth-aachen.de
FLOROS ET AL.: MULTI-CLASS IMAGE LABELING WITH TOP-DOWN SEGMENTATIONS 1 Multi-Class Image Labeling with Top-Down Segmentation and Generalized Robust P N Potentials Georgios Floros 1 floros@umic.rwth-aachen.de
Segmenting Objects in Weakly Labeled Videos
 Segmenting Objects in Weakly Labeled Videos Mrigank Rochan, Shafin Rahman, Neil D.B. Bruce, Yang Wang Department of Computer Science University of Manitoba Winnipeg, Canada {mrochan, shafin12, bruce, ywang}@cs.umanitoba.ca
Segmenting Objects in Weakly Labeled Videos Mrigank Rochan, Shafin Rahman, Neil D.B. Bruce, Yang Wang Department of Computer Science University of Manitoba Winnipeg, Canada {mrochan, shafin12, bruce, ywang}@cs.umanitoba.ca
Combining Appearance and Structure from Motion Features for Road Scene Understanding
 STURGESS et al.: COMBINING APPEARANCE AND SFM FEATURES 1 Combining Appearance and Structure from Motion Features for Road Scene Understanding Paul Sturgess paul.sturgess@brookes.ac.uk Karteek Alahari karteek.alahari@brookes.ac.uk
STURGESS et al.: COMBINING APPEARANCE AND SFM FEATURES 1 Combining Appearance and Structure from Motion Features for Road Scene Understanding Paul Sturgess paul.sturgess@brookes.ac.uk Karteek Alahari karteek.alahari@brookes.ac.uk
Joint Semantic and Geometric Segmentation of Videos with a Stage Model
 Joint Semantic and Geometric Segmentation of Videos with a Stage Model Buyu Liu ANU and NICTA Canberra, ACT, Australia buyu.liu@anu.edu.au Xuming He NICTA and ANU Canberra, ACT, Australia xuming.he@nicta.com.au
Joint Semantic and Geometric Segmentation of Videos with a Stage Model Buyu Liu ANU and NICTA Canberra, ACT, Australia buyu.liu@anu.edu.au Xuming He NICTA and ANU Canberra, ACT, Australia xuming.he@nicta.com.au
What, Where & How Many? Combining Object Detectors and CRFs
 What, Where & How Many? Combining Object Detectors and CRFs Lubor Ladicky, Paul Sturgess, Karteek Alahari, Chris Russell, and Philip H.S. Torr Oxford Brookes University http://cms.brookes.ac.uk/research/visiongroup
What, Where & How Many? Combining Object Detectors and CRFs Lubor Ladicky, Paul Sturgess, Karteek Alahari, Chris Russell, and Philip H.S. Torr Oxford Brookes University http://cms.brookes.ac.uk/research/visiongroup
Joint 2D-3D Temporally Consistent Semantic Segmentation of Street Scenes
 Joint 2D-3D Temporally Consistent Semantic Segmentation of Street Scenes Georgios Floros and Bastian Leibe UMIC Research Centre RWTH Aachen University, Germany {floros,leibe}@umic.rwth-aachen.de Abstract
Joint 2D-3D Temporally Consistent Semantic Segmentation of Street Scenes Georgios Floros and Bastian Leibe UMIC Research Centre RWTH Aachen University, Germany {floros,leibe}@umic.rwth-aachen.de Abstract
Supervised texture detection in images
 Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
OCCLUSION BOUNDARIES ESTIMATION FROM A HIGH-RESOLUTION SAR IMAGE
 OCCLUSION BOUNDARIES ESTIMATION FROM A HIGH-RESOLUTION SAR IMAGE Wenju He, Marc Jäger, and Olaf Hellwich Berlin University of Technology FR3-1, Franklinstr. 28, 10587 Berlin, Germany {wenjuhe, jaeger,
OCCLUSION BOUNDARIES ESTIMATION FROM A HIGH-RESOLUTION SAR IMAGE Wenju He, Marc Jäger, and Olaf Hellwich Berlin University of Technology FR3-1, Franklinstr. 28, 10587 Berlin, Germany {wenjuhe, jaeger,
Automatic Dense Semantic Mapping From Visual Street-level Imagery
 Automatic Dense Semantic Mapping From Visual Street-level Imagery Sunando Sengupta [1], Paul Sturgess [1], Lubor Ladicky [2], Phillip H.S. Torr [1] [1] Oxford Brookes University [2] Visual Geometry Group,
Automatic Dense Semantic Mapping From Visual Street-level Imagery Sunando Sengupta [1], Paul Sturgess [1], Lubor Ladicky [2], Phillip H.S. Torr [1] [1] Oxford Brookes University [2] Visual Geometry Group,
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction
 Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Analysis: TextonBoost and Semantic Texton Forests. Daniel Munoz Februrary 9, 2009
 Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Using the Kolmogorov-Smirnov Test for Image Segmentation
 Using the Kolmogorov-Smirnov Test for Image Segmentation Yong Jae Lee CS395T Computational Statistics Final Project Report May 6th, 2009 I. INTRODUCTION Image segmentation is a fundamental task in computer
Using the Kolmogorov-Smirnov Test for Image Segmentation Yong Jae Lee CS395T Computational Statistics Final Project Report May 6th, 2009 I. INTRODUCTION Image segmentation is a fundamental task in computer
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Sparse Dictionaries for Semantic Segmentation
 Sparse Dictionaries for Semantic Segmentation Lingling Tao 1, Fatih Porikli 2, and René Vidal 1 1 Center for Imaging Science, Johns Hopkins University, USA 2 Australian National University & NICTA ICT,
Sparse Dictionaries for Semantic Segmentation Lingling Tao 1, Fatih Porikli 2, and René Vidal 1 1 Center for Imaging Science, Johns Hopkins University, USA 2 Australian National University & NICTA ICT,
Markov Networks in Computer Vision. Sargur Srihari
 Markov Networks in Computer Vision Sargur srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Important application area for MNs 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Markov Networks in Computer Vision Sargur srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Important application area for MNs 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Self Lane Assignment Using Smart Mobile Camera For Intelligent GPS Navigation and Traffic Interpretation
 For Intelligent GPS Navigation and Traffic Interpretation Tianshi Gao Stanford University tianshig@stanford.edu 1. Introduction Imagine that you are driving on the highway at 70 mph and trying to figure
For Intelligent GPS Navigation and Traffic Interpretation Tianshi Gao Stanford University tianshig@stanford.edu 1. Introduction Imagine that you are driving on the highway at 70 mph and trying to figure
Motion Tracking and Event Understanding in Video Sequences
 Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Markov Networks in Computer Vision
 Markov Networks in Computer Vision Sargur Srihari srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Some applications: 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Markov Networks in Computer Vision Sargur Srihari srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Some applications: 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
CS229: Action Recognition in Tennis
 CS229: Action Recognition in Tennis Aman Sikka Stanford University Stanford, CA 94305 Rajbir Kataria Stanford University Stanford, CA 94305 asikka@stanford.edu rkataria@stanford.edu 1. Motivation As active
CS229: Action Recognition in Tennis Aman Sikka Stanford University Stanford, CA 94305 Rajbir Kataria Stanford University Stanford, CA 94305 asikka@stanford.edu rkataria@stanford.edu 1. Motivation As active
Exploiting Sparsity for Real Time Video Labelling
 2013 IEEE International Conference on Computer Vision Workshops Exploiting Sparsity for Real Time Video Labelling Lachlan Horne, Jose M. Alvarez, and Nick Barnes College of Engineering and Computer Science,
2013 IEEE International Conference on Computer Vision Workshops Exploiting Sparsity for Real Time Video Labelling Lachlan Horne, Jose M. Alvarez, and Nick Barnes College of Engineering and Computer Science,
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Region-based Segmentation and Object Detection
 Region-based Segmentation and Object Detection Stephen Gould Tianshi Gao Daphne Koller Presented at NIPS 2009 Discussion and Slides by Eric Wang April 23, 2010 Outline Introduction Model Overview Model
Region-based Segmentation and Object Detection Stephen Gould Tianshi Gao Daphne Koller Presented at NIPS 2009 Discussion and Slides by Eric Wang April 23, 2010 Outline Introduction Model Overview Model
Semantic segmentation of street scenes by superpixel co-occurrence and 3D geometry
 Semantic segmentation of street scenes by superpixel co-occurrence and 3D geometry B. Micusik and J. Košecka Department of Computer Science George Mason University bmicusik,kosecka@gmu.edu Abstract We
Semantic segmentation of street scenes by superpixel co-occurrence and 3D geometry B. Micusik and J. Košecka Department of Computer Science George Mason University bmicusik,kosecka@gmu.edu Abstract We
Separating Objects and Clutter in Indoor Scenes
 Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
Previously. Part-based and local feature models for generic object recognition. Bag-of-words model 4/20/2011
 Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Video Object Proposals
 Video Object Proposals Gilad Sharir Tinne Tuytelaars KU Leuven ESAT/PSI - IBBT Abstract In this paper, we extend a recently proposed method for generic object detection in images, category-independent
Video Object Proposals Gilad Sharir Tinne Tuytelaars KU Leuven ESAT/PSI - IBBT Abstract In this paper, we extend a recently proposed method for generic object detection in images, category-independent
Detecting motion by means of 2D and 3D information
 Detecting motion by means of 2D and 3D information Federico Tombari Stefano Mattoccia Luigi Di Stefano Fabio Tonelli Department of Electronics Computer Science and Systems (DEIS) Viale Risorgimento 2,
Detecting motion by means of 2D and 3D information Federico Tombari Stefano Mattoccia Luigi Di Stefano Fabio Tonelli Department of Electronics Computer Science and Systems (DEIS) Viale Risorgimento 2,
Structured Models in. Dan Huttenlocher. June 2010
 Structured Models in Computer Vision i Dan Huttenlocher June 2010 Structured Models Problems where output variables are mutually dependent or constrained E.g., spatial or temporal relations Such dependencies
Structured Models in Computer Vision i Dan Huttenlocher June 2010 Structured Models Problems where output variables are mutually dependent or constrained E.g., spatial or temporal relations Such dependencies
Part-based and local feature models for generic object recognition
 Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Using Global Bag of Features Models in Random Fields for Joint Categorization and Segmentation of Objects
 Using Global Bag of Features Models in Random Fields for Joint Categorization and Segmentation of Objects Dheeraj Singaraju René Vidal Center for Imaging Science, Johns Hopkins University, Baltimore MD
Using Global Bag of Features Models in Random Fields for Joint Categorization and Segmentation of Objects Dheeraj Singaraju René Vidal Center for Imaging Science, Johns Hopkins University, Baltimore MD
Beyond Bags of features Spatial information & Shape models
 Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
3D Scene Understanding by Voxel-CRF
 3D Scene Understanding by Voxel-CRF Byung-soo Kim University of Michigan bsookim@umich.edu Pushmeet Kohli Microsoft Research Cambridge pkohli@microsoft.com Silvio Savarese Stanford University ssilvio@stanford.edu
3D Scene Understanding by Voxel-CRF Byung-soo Kim University of Michigan bsookim@umich.edu Pushmeet Kohli Microsoft Research Cambridge pkohli@microsoft.com Silvio Savarese Stanford University ssilvio@stanford.edu
2013 IEEE International Conference on Computer Vision. Exemplar Cut
 2013 IEEE International Conference on Computer Vision Exemplar Cut Jimei Yang, Yi-Hsuan Tsai and Ming-Hsuan Yang University of California, Merced 5200 North Lake Road, Merced CA {jyang44, ytsai2, mhyang}@ucmerced.edu
2013 IEEE International Conference on Computer Vision Exemplar Cut Jimei Yang, Yi-Hsuan Tsai and Ming-Hsuan Yang University of California, Merced 5200 North Lake Road, Merced CA {jyang44, ytsai2, mhyang}@ucmerced.edu
SuperParsing: Scalable Nonparametric Image Parsing with Superpixels
 SuperParsing: Scalable Nonparametric Image Parsing with Superpixels Joseph Tighe and Svetlana Lazebnik Dept. of Computer Science, University of North Carolina at Chapel Hill Chapel Hill, NC 27599-3175
SuperParsing: Scalable Nonparametric Image Parsing with Superpixels Joseph Tighe and Svetlana Lazebnik Dept. of Computer Science, University of North Carolina at Chapel Hill Chapel Hill, NC 27599-3175
Multi-class Semantic Video Segmentation with Exemplar-based Object Reasoning
 Multiclass Semantic Video Segmentation with Exemplarbased Object Reasoning Buyu Liu ANU/NICTA Buyu.Liu@anu.edu.au Xuming He NICTA/ANU Xuming.He@anu.edu.au Stephen Gould ANU/NICTA stephen.gould@anu.edu.au
Multiclass Semantic Video Segmentation with Exemplarbased Object Reasoning Buyu Liu ANU/NICTA Buyu.Liu@anu.edu.au Xuming He NICTA/ANU Xuming.He@anu.edu.au Stephen Gould ANU/NICTA stephen.gould@anu.edu.au
Finding Things: Image Parsing with Regions and Per-Exemplar Detectors
 2013 IEEE Conference on Computer Vision and Pattern Recognition Finding Things: Image Parsing with Regions and Per-Exemplar Detectors Joseph Tighe University of North olina at Chapel Hill jtighe@cs.unc.edu
2013 IEEE Conference on Computer Vision and Pattern Recognition Finding Things: Image Parsing with Regions and Per-Exemplar Detectors Joseph Tighe University of North olina at Chapel Hill jtighe@cs.unc.edu
Geometric Context from Videos
 2013 IEEE Conference on Computer Vision and Pattern Recognition Geometric Context from Videos S. Hussain Raza Matthias Grundmann Irfan Essa Georgia Institute of Technology, Atlanta, GA, USA http://www.cc.gatech.edu/cpl/projects/videogeometriccontext
2013 IEEE Conference on Computer Vision and Pattern Recognition Geometric Context from Videos S. Hussain Raza Matthias Grundmann Irfan Essa Georgia Institute of Technology, Atlanta, GA, USA http://www.cc.gatech.edu/cpl/projects/videogeometriccontext
Part based models for recognition. Kristen Grauman
 Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Detecting Object Instances Without Discriminative Features
 Detecting Object Instances Without Discriminative Features Edward Hsiao June 19, 2013 Thesis Committee: Martial Hebert, Chair Alexei Efros Takeo Kanade Andrew Zisserman, University of Oxford 1 Object Instance
Detecting Object Instances Without Discriminative Features Edward Hsiao June 19, 2013 Thesis Committee: Martial Hebert, Chair Alexei Efros Takeo Kanade Andrew Zisserman, University of Oxford 1 Object Instance
Object detection using non-redundant local Binary Patterns
 University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2010 Object detection using non-redundant local Binary Patterns Duc Thanh
University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2010 Object detection using non-redundant local Binary Patterns Duc Thanh
Segmentation as Selective Search for Object Recognition in ILSVRC2011
 Segmentation as Selective Search for Object Recognition in ILSVRC2011 Koen van de Sande Jasper Uijlings Arnold Smeulders Theo Gevers Nicu Sebe Cees Snoek University of Amsterdam, University of Trento ILSVRC2011
Segmentation as Selective Search for Object Recognition in ILSVRC2011 Koen van de Sande Jasper Uijlings Arnold Smeulders Theo Gevers Nicu Sebe Cees Snoek University of Amsterdam, University of Trento ILSVRC2011
Notes 9: Optical Flow
 Course 049064: Variational Methods in Image Processing Notes 9: Optical Flow Guy Gilboa 1 Basic Model 1.1 Background Optical flow is a fundamental problem in computer vision. The general goal is to find
Course 049064: Variational Methods in Image Processing Notes 9: Optical Flow Guy Gilboa 1 Basic Model 1.1 Background Optical flow is a fundamental problem in computer vision. The general goal is to find
Multi-Class Segmentation with Relative Location Prior
 Multi-Class Segmentation with Relative Location Prior Stephen Gould, Jim Rodgers, David Cohen, Gal Elidan, Daphne Koller Department of Computer Science, Stanford University International Journal of Computer
Multi-Class Segmentation with Relative Location Prior Stephen Gould, Jim Rodgers, David Cohen, Gal Elidan, Daphne Koller Department of Computer Science, Stanford University International Journal of Computer
IMPROVED FINE STRUCTURE MODELING VIA GUIDED STOCHASTIC CLIQUE FORMATION IN FULLY CONNECTED CONDITIONAL RANDOM FIELDS
 IMPROVED FINE STRUCTURE MODELING VIA GUIDED STOCHASTIC CLIQUE FORMATION IN FULLY CONNECTED CONDITIONAL RANDOM FIELDS M. J. Shafiee, A. G. Chung, A. Wong, and P. Fieguth Vision & Image Processing Lab, Systems
IMPROVED FINE STRUCTURE MODELING VIA GUIDED STOCHASTIC CLIQUE FORMATION IN FULLY CONNECTED CONDITIONAL RANDOM FIELDS M. J. Shafiee, A. G. Chung, A. Wong, and P. Fieguth Vision & Image Processing Lab, Systems
Exemplar Cut. Jimei Yang, Yi-Hsuan Tsai and Ming-Hsuan Yang University of California, Merced 5200 North Lake Road, Merced CA
 Exemplar Cut Jimei Yang, Yi-Hsuan Tsai and Ming-Hsuan Yang University of California, Merced 5200 North Lake Road, Merced CA {jyang44, ytsai2, mhyang}@ucmerced.edu Abstract We present a hybrid parametric
Exemplar Cut Jimei Yang, Yi-Hsuan Tsai and Ming-Hsuan Yang University of California, Merced 5200 North Lake Road, Merced CA {jyang44, ytsai2, mhyang}@ucmerced.edu Abstract We present a hybrid parametric
Estimating Human Pose in Images. Navraj Singh December 11, 2009
 Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Revisiting 3D Geometric Models for Accurate Object Shape and Pose
 Revisiting 3D Geometric Models for Accurate Object Shape and Pose M. 1 Michael Stark 2,3 Bernt Schiele 3 Konrad Schindler 1 1 Photogrammetry and Remote Sensing Laboratory Swiss Federal Institute of Technology
Revisiting 3D Geometric Models for Accurate Object Shape and Pose M. 1 Michael Stark 2,3 Bernt Schiele 3 Konrad Schindler 1 1 Photogrammetry and Remote Sensing Laboratory Swiss Federal Institute of Technology
Decomposing a Scene into Geometric and Semantically Consistent Regions
 Decomposing a Scene into Geometric and Semantically Consistent Regions Stephen Gould sgould@stanford.edu Richard Fulton rafulton@cs.stanford.edu Daphne Koller koller@cs.stanford.edu IEEE International
Decomposing a Scene into Geometric and Semantically Consistent Regions Stephen Gould sgould@stanford.edu Richard Fulton rafulton@cs.stanford.edu Daphne Koller koller@cs.stanford.edu IEEE International
Towards Open-Universe Image Parsing with Broad Coverage
 Towards Open-Universe Image Parsing with Broad Coverage Joseph Tighe University of North olina at Chapel Hill jtighe@cs.unc.edu Svetlana Lazebnik University of Illinois at Urbana-Champaign slazebni@illinois.edu
Towards Open-Universe Image Parsing with Broad Coverage Joseph Tighe University of North olina at Chapel Hill jtighe@cs.unc.edu Svetlana Lazebnik University of Illinois at Urbana-Champaign slazebni@illinois.edu
Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation
 Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation M. Blauth, E. Kraft, F. Hirschenberger, M. Böhm Fraunhofer Institute for Industrial Mathematics, Fraunhofer-Platz 1,
Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation M. Blauth, E. Kraft, F. Hirschenberger, M. Böhm Fraunhofer Institute for Industrial Mathematics, Fraunhofer-Platz 1,
A Segmentation-aware Object Detection Model with Occlusion Handling
 A Segmentation-aware Object Detection Model with Occlusion Handling Tianshi Gao 1 Benjamin Packer 2 Daphne Koller 2 1 Department of Electrical Engineering, Stanford University 2 Department of Computer
A Segmentation-aware Object Detection Model with Occlusion Handling Tianshi Gao 1 Benjamin Packer 2 Daphne Koller 2 1 Department of Electrical Engineering, Stanford University 2 Department of Computer
Semantic Segmentation of Street-Side Images
 Semantic Segmentation of Street-Side Images Michal Recky 1, Franz Leberl 2 1 Institute for Computer Graphics and Vision Graz University of Technology recky@icg.tugraz.at 2 Institute for Computer Graphics
Semantic Segmentation of Street-Side Images Michal Recky 1, Franz Leberl 2 1 Institute for Computer Graphics and Vision Graz University of Technology recky@icg.tugraz.at 2 Institute for Computer Graphics
Contextual Classification with Functional Max-Margin Markov Networks
 Contextual Classification with Functional Max-Margin Markov Networks Dan Munoz Nicolas Vandapel Drew Bagnell Martial Hebert Geometry Estimation (Hoiem et al.) Sky Problem 3-D Point Cloud Classification
Contextual Classification with Functional Max-Margin Markov Networks Dan Munoz Nicolas Vandapel Drew Bagnell Martial Hebert Geometry Estimation (Hoiem et al.) Sky Problem 3-D Point Cloud Classification
Class Segmentation and Object Localization with Superpixel Neighborhoods
 Class Segmentation and Object Localization with Superpixel Neighborhoods Brian Fulkerson Andrea Vedaldi Stefano Soatto Department of Computer Science Department of Engineering Science University of California,
Class Segmentation and Object Localization with Superpixel Neighborhoods Brian Fulkerson Andrea Vedaldi Stefano Soatto Department of Computer Science Department of Engineering Science University of California,
Summarization of Egocentric Moving Videos for Generating Walking Route Guidance
 Summarization of Egocentric Moving Videos for Generating Walking Route Guidance Masaya Okamoto and Keiji Yanai Department of Informatics, The University of Electro-Communications 1-5-1 Chofugaoka, Chofu-shi,
Summarization of Egocentric Moving Videos for Generating Walking Route Guidance Masaya Okamoto and Keiji Yanai Department of Informatics, The University of Electro-Communications 1-5-1 Chofugaoka, Chofu-shi,
Scene Understanding From a Moving Camera for Object Detection and Free Space Estimation
 Scene Understanding From a Moving Camera for Object Detection and Free Space Estimation Vladimir Haltakov, Heidrun Belzner and Slobodan Ilic Abstract Modern vehicles are equipped with multiple cameras
Scene Understanding From a Moving Camera for Object Detection and Free Space Estimation Vladimir Haltakov, Heidrun Belzner and Slobodan Ilic Abstract Modern vehicles are equipped with multiple cameras
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Harmony Potentials for Joint Classification and Segmentation
 Harmony Potentials for Joint Classification and Segmentation Josep M. Gonfaus 1,2, Xavier Boix 1, Joost van de Weijer 1,2 Andrew D. Bagdanov 1 Joan Serrat 1,2 Jordi Gonzàlez 1,2 1 Centre de Visió per Computador
Harmony Potentials for Joint Classification and Segmentation Josep M. Gonfaus 1,2, Xavier Boix 1, Joost van de Weijer 1,2 Andrew D. Bagdanov 1 Joan Serrat 1,2 Jordi Gonzàlez 1,2 1 Centre de Visió per Computador
Acquiring Semantics Induced Topology in Urban Environments
 2012 IEEE International Conference on Robotics and Automation RiverCentre, Saint Paul, Minnesota, USA May 14-18, 2012 Acquiring Semantics Induced Topology in Urban Environments Gautam Singh and Jana Košecká
2012 IEEE International Conference on Robotics and Automation RiverCentre, Saint Paul, Minnesota, USA May 14-18, 2012 Acquiring Semantics Induced Topology in Urban Environments Gautam Singh and Jana Košecká
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model
 Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model Johnson Hsieh (johnsonhsieh@gmail.com), Alexander Chia (alexchia@stanford.edu) Abstract -- Object occlusion presents a major
Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model Johnson Hsieh (johnsonhsieh@gmail.com), Alexander Chia (alexchia@stanford.edu) Abstract -- Object occlusion presents a major
Spatial Latent Dirichlet Allocation
 Spatial Latent Dirichlet Allocation Xiaogang Wang and Eric Grimson Computer Science and Computer Science and Artificial Intelligence Lab Massachusetts Tnstitute of Technology, Cambridge, MA, 02139, USA
Spatial Latent Dirichlet Allocation Xiaogang Wang and Eric Grimson Computer Science and Computer Science and Artificial Intelligence Lab Massachusetts Tnstitute of Technology, Cambridge, MA, 02139, USA
HDPA: HIERARCHICAL DEEP PROBABILITY ANALYSIS FOR SCENE PARSING
 Proceedings of the IEEE International Conference on Multimedia and Expo (ICME) 2017 10-14 July 2017 HDPA: HIERARCHICAL DEEP PROBABILITY ANALYSIS FOR SCENE PARSING Yuan Yuan 1, Zhiyu Jiang 1,2, and Qi Wang
Proceedings of the IEEE International Conference on Multimedia and Expo (ICME) 2017 10-14 July 2017 HDPA: HIERARCHICAL DEEP PROBABILITY ANALYSIS FOR SCENE PARSING Yuan Yuan 1, Zhiyu Jiang 1,2, and Qi Wang
Learning Two-View Stereo Matching
 Learning Two-View Stereo Matching Jianxiong Xiao Jingni Chen Dit-Yan Yeung Long Quan Department of Computer Science and Engineering The Hong Kong University of Science and Technology The 10th European
Learning Two-View Stereo Matching Jianxiong Xiao Jingni Chen Dit-Yan Yeung Long Quan Department of Computer Science and Engineering The Hong Kong University of Science and Technology The 10th European
Supplementary material: Strengthening the Effectiveness of Pedestrian Detection with Spatially Pooled Features
 Supplementary material: Strengthening the Effectiveness of Pedestrian Detection with Spatially Pooled Features Sakrapee Paisitkriangkrai, Chunhua Shen, Anton van den Hengel The University of Adelaide,
Supplementary material: Strengthening the Effectiveness of Pedestrian Detection with Spatially Pooled Features Sakrapee Paisitkriangkrai, Chunhua Shen, Anton van den Hengel The University of Adelaide,
Automatic Photo Popup
 Automatic Photo Popup Derek Hoiem Alexei A. Efros Martial Hebert Carnegie Mellon University What Is Automatic Photo Popup Introduction Creating 3D models from images is a complex process Time-consuming
Automatic Photo Popup Derek Hoiem Alexei A. Efros Martial Hebert Carnegie Mellon University What Is Automatic Photo Popup Introduction Creating 3D models from images is a complex process Time-consuming
COSC160: Detection and Classification. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
CS 4495 Computer Vision Motion and Optic Flow
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
Gradient of the lower bound
 Weakly Supervised with Latent PhD advisor: Dr. Ambedkar Dukkipati Department of Computer Science and Automation gaurav.pandey@csa.iisc.ernet.in Objective Given a training set that comprises image and image-level
Weakly Supervised with Latent PhD advisor: Dr. Ambedkar Dukkipati Department of Computer Science and Automation gaurav.pandey@csa.iisc.ernet.in Objective Given a training set that comprises image and image-level
Hough Regions for Joining Instance Localization and Segmentation
 Hough Regions for Joining Instance Localization and Segmentation Hayko Riemenschneider 1,2, Sabine Sternig 1, Michael Donoser 1, Peter M. Roth 1, and Horst Bischof 1 1 Institute for Computer Graphics and
Hough Regions for Joining Instance Localization and Segmentation Hayko Riemenschneider 1,2, Sabine Sternig 1, Michael Donoser 1, Peter M. Roth 1, and Horst Bischof 1 1 Institute for Computer Graphics and
String distance for automatic image classification
 String distance for automatic image classification Nguyen Hong Thinh*, Le Vu Ha*, Barat Cecile** and Ducottet Christophe** *University of Engineering and Technology, Vietnam National University of HaNoi,
String distance for automatic image classification Nguyen Hong Thinh*, Le Vu Ha*, Barat Cecile** and Ducottet Christophe** *University of Engineering and Technology, Vietnam National University of HaNoi,
Modeling 3D viewpoint for part-based object recognition of rigid objects
 Modeling 3D viewpoint for part-based object recognition of rigid objects Joshua Schwartz Department of Computer Science Cornell University jdvs@cs.cornell.edu Abstract Part-based object models based on
Modeling 3D viewpoint for part-based object recognition of rigid objects Joshua Schwartz Department of Computer Science Cornell University jdvs@cs.cornell.edu Abstract Part-based object models based on
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Generic Object Detection Using Improved Gentleboost Classifier
 Available online at www.sciencedirect.com Physics Procedia 25 (2012 ) 1528 1535 2012 International Conference on Solid State Devices and Materials Science Generic Object Detection Using Improved Gentleboost
Available online at www.sciencedirect.com Physics Procedia 25 (2012 ) 1528 1535 2012 International Conference on Solid State Devices and Materials Science Generic Object Detection Using Improved Gentleboost
Discriminative classifiers for image recognition
 Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
ROBUST ROAD DETECTION FROM A SINGLE IMAGE USING ROAD SHAPE PRIOR. Zhen He, Tao Wu, Zhipeng Xiao, Hangen He
 ROBUST ROAD DETECTION FROM A SINGLE IMAGE USING ROAD SHAPE PRIOR Zhen He, Tao Wu, Zhipeng Xiao, Hangen He College of Mechatronics and Automation National University of Defense Technology Changsha, Hunan,
ROBUST ROAD DETECTION FROM A SINGLE IMAGE USING ROAD SHAPE PRIOR Zhen He, Tao Wu, Zhipeng Xiao, Hangen He College of Mechatronics and Automation National University of Defense Technology Changsha, Hunan,
Tri-modal Human Body Segmentation
 Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
Nonparametric Semantic Segmentation for 3D Street Scenes
 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 2013. Tokyo, Japan Nonparametric Semantic Segmentation for 3D Street Scenes Hu He and Ben Upcroft Abstract
2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 2013. Tokyo, Japan Nonparametric Semantic Segmentation for 3D Street Scenes Hu He and Ben Upcroft Abstract
Multiple Motion and Occlusion Segmentation with a Multiphase Level Set Method
 Multiple Motion and Occlusion Segmentation with a Multiphase Level Set Method Yonggang Shi, Janusz Konrad, W. Clem Karl Department of Electrical and Computer Engineering Boston University, Boston, MA 02215
Multiple Motion and Occlusion Segmentation with a Multiphase Level Set Method Yonggang Shi, Janusz Konrad, W. Clem Karl Department of Electrical and Computer Engineering Boston University, Boston, MA 02215
LEARNING BOUNDARIES WITH COLOR AND DEPTH. Zhaoyin Jia, Andrew Gallagher, Tsuhan Chen
 LEARNING BOUNDARIES WITH COLOR AND DEPTH Zhaoyin Jia, Andrew Gallagher, Tsuhan Chen School of Electrical and Computer Engineering, Cornell University ABSTRACT To enable high-level understanding of a scene,
LEARNING BOUNDARIES WITH COLOR AND DEPTH Zhaoyin Jia, Andrew Gallagher, Tsuhan Chen School of Electrical and Computer Engineering, Cornell University ABSTRACT To enable high-level understanding of a scene,
Human Motion Detection and Tracking for Video Surveillance
 Human Motion Detection and Tracking for Video Surveillance Prithviraj Banerjee and Somnath Sengupta Department of Electronics and Electrical Communication Engineering Indian Institute of Technology, Kharagpur,
Human Motion Detection and Tracking for Video Surveillance Prithviraj Banerjee and Somnath Sengupta Department of Electronics and Electrical Communication Engineering Indian Institute of Technology, Kharagpur,
Region-based Segmentation and Object Detection
 Region-based Segmentation and Object Detection Stephen Gould 1 Tianshi Gao 1 Daphne Koller 2 1 Department of Electrical Engineering, Stanford University 2 Department of Computer Science, Stanford University
Region-based Segmentation and Object Detection Stephen Gould 1 Tianshi Gao 1 Daphne Koller 2 1 Department of Electrical Engineering, Stanford University 2 Department of Computer Science, Stanford University
Layered Interpretation of Street View Images
 Layered Interpretation of Street View Images Ming-Yu Liu, Shuoxin Lin, Srikumar Ramalingam, and Oncel Tuzel Mitsubishi Electric Research Labs MERL), Cambridge, Massachusetts, USA Email: {mliu,ramalingam,oncel}@merl.com
Layered Interpretation of Street View Images Ming-Yu Liu, Shuoxin Lin, Srikumar Ramalingam, and Oncel Tuzel Mitsubishi Electric Research Labs MERL), Cambridge, Massachusetts, USA Email: {mliu,ramalingam,oncel}@merl.com
COMPUTER VISION > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE
 COMPUTER VISION 2017-2018 > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE OUTLINE Optical flow Lucas-Kanade Horn-Schunck Applications of optical flow Optical flow tracking Histograms of oriented flow Assignment
COMPUTER VISION 2017-2018 > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE OUTLINE Optical flow Lucas-Kanade Horn-Schunck Applications of optical flow Optical flow tracking Histograms of oriented flow Assignment
Simultaneous Multi-class Pixel Labeling over Coherent Image Sets
 Simultaneous Multi-class Pixel Labeling over Coherent Image Sets Paul Rivera Research School of Computer Science Australian National University Canberra, ACT 0200 Stephen Gould Research School of Computer
Simultaneous Multi-class Pixel Labeling over Coherent Image Sets Paul Rivera Research School of Computer Science Australian National University Canberra, ACT 0200 Stephen Gould Research School of Computer
Beyond Bags of Features
 : for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
: for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
570 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 20, NO. 2, FEBRUARY 2011
 570 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 20, NO. 2, FEBRUARY 2011 Contextual Object Localization With Multiple Kernel Nearest Neighbor Brian McFee, Student Member, IEEE, Carolina Galleguillos, Student
570 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 20, NO. 2, FEBRUARY 2011 Contextual Object Localization With Multiple Kernel Nearest Neighbor Brian McFee, Student Member, IEEE, Carolina Galleguillos, Student
08 An Introduction to Dense Continuous Robotic Mapping
 NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
Detection III: Analyzing and Debugging Detection Methods
 CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
Detecting and Segmenting Humans in Crowded Scenes
 Detecting and Segmenting Humans in Crowded Scenes Mikel D. Rodriguez University of Central Florida 4000 Central Florida Blvd Orlando, Florida, 32816 mikel@cs.ucf.edu Mubarak Shah University of Central
Detecting and Segmenting Humans in Crowded Scenes Mikel D. Rodriguez University of Central Florida 4000 Central Florida Blvd Orlando, Florida, 32816 mikel@cs.ucf.edu Mubarak Shah University of Central
Visualization 2D-to-3D Photo Rendering for 3D Displays
 Visualization 2D-to-3D Photo Rendering for 3D Displays Sumit K Chauhan 1, Divyesh R Bajpai 2, Vatsal H Shah 3 1 Information Technology, Birla Vishvakarma mahavidhyalaya,sumitskc51@gmail.com 2 Information
Visualization 2D-to-3D Photo Rendering for 3D Displays Sumit K Chauhan 1, Divyesh R Bajpai 2, Vatsal H Shah 3 1 Information Technology, Birla Vishvakarma mahavidhyalaya,sumitskc51@gmail.com 2 Information
Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection
 Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection Hyunghoon Cho and David Wu December 10, 2010 1 Introduction Given its performance in recent years' PASCAL Visual
Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection Hyunghoon Cho and David Wu December 10, 2010 1 Introduction Given its performance in recent years' PASCAL Visual
Color Image Segmentation
 Color Image Segmentation Yining Deng, B. S. Manjunath and Hyundoo Shin* Department of Electrical and Computer Engineering University of California, Santa Barbara, CA 93106-9560 *Samsung Electronics Inc.
Color Image Segmentation Yining Deng, B. S. Manjunath and Hyundoo Shin* Department of Electrical and Computer Engineering University of California, Santa Barbara, CA 93106-9560 *Samsung Electronics Inc.
arxiv: v1 [cs.cv] 7 Aug 2017
![arxiv: v1 [cs.cv] 7 Aug 2017](/thumbs/81/83599070.jpg "arxiv: v1 [cs.cv] 7 Aug 2017") LEARNING TO SEGMENT ON TINY DATASETS: A NEW SHAPE MODEL Maxime Tremblay, André Zaccarin Computer Vision and Systems Laboratory, Université Laval Quebec City (QC), Canada arxiv:1708.02165v1 [cs.cv] 7 Aug
LEARNING TO SEGMENT ON TINY DATASETS: A NEW SHAPE MODEL Maxime Tremblay, André Zaccarin Computer Vision and Systems Laboratory, Université Laval Quebec City (QC), Canada arxiv:1708.02165v1 [cs.cv] 7 Aug
CRF Based Point Cloud Segmentation Jonathan Nation
 CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to