Motion Planning. Jana Kosecka Department of Computer Science
|
|
|
- Gabriella Robertson
- 5 years ago
- Views:
Transcription
1 Motion Planning Jana Kosecka Department of Computer Science Discrete planning, graph search, shortest path, A* methods Road map methods Configuration space Slides thanks to Jyh-Ming Lien
2 Discrete Planning Review of some discrete planning methods Given state space and transition function and initial state, find a set of states which lead to goal state (state space is discrete) Use well developed search and graph traversal algorithms to find the path Path: set of vertices in the graph For more details CS 583, CS 580
3 Previously Reactive Navigation Strategies Braitenberg vehicles no map of the world, no memory Extensions to more complex behaviors and behavior assemblages Steering behaviors Today: Navigation with some memory Map based approaches More general motion planning methods

4 Bug Algorithms Extensions of reactive strategies Assumes local knowledge of the environment And global knowledge of the goal

5 Bug Algorithms Algorithm Head towards the goal until you encounter obstacle Follow obstacle until you can turn to goal again Continue

6 Bug 1 Head towards the goal Circumnavigate obstacle and Remember how close you got to The goal Return to the closes point by Wall following Continue
7 Completeness Algorithm is complete if in finite time will find the path to the goal or declare failure if such path does not exist Incomplete algorithm never terminates, or does not find the goal


8 Bug 2 Draw a line to the goal. Follow the line until obstacle, then circumnavigate to obstacle until you reach the goal heads towards the goal again

9 Potential problem Follow the obstacle until you encounter line closer to the goal Leave the obstacle and continue

10 Bug 1 vs Bug 2 Bug 2 beats Bug 1 Bug 1 beats Bug2
11 Bug 1 vs Bug 2 Bug 1 is an exhaustive search algorithm - looks at all choices before committing Bug 2 is a greedy algorithm, takes the first thing that looks better Bug 2 in many cases out performs Bug 1, but Bug 1 is overall more reliable


12 Examples in practice Example using zero range sensors Example with finite range sensors
13 Map based planning Consider a simple case of map Grid with cells marked as occupied or empty Formulate path finding problem as a search What is the sequence of states you need to visit in order to reach the goal
14 Navigation functions - Discrete version Useful potential functions for any starting point you will reach a goal: Navigation function (see previously how to define these in continuous spaces) In discrete state space navigation function has to have some value for each state, consider grid Goal: will have zero potential Obstacles have infinite potential Example of useful navigation function: optimal cost to go to goal G* (example), assuming that for each state l(x,u) =1

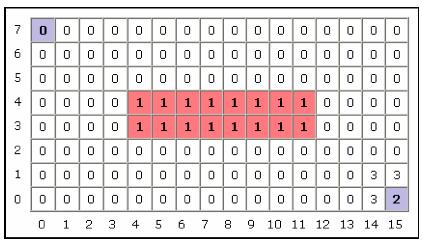
15 Wavefront planner

16

17 Zeros should exist only in unreachable regions exist Ones for regions which cannot be reached Other book keeping methods can be used

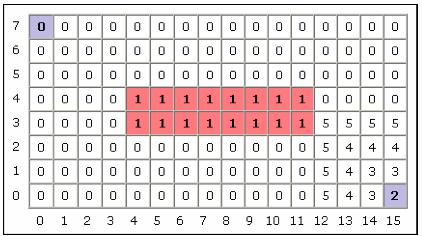
18 Finding the path From any initial grid cell, move toward the cell with the lowest number follow the steepest descent
19 Wavefront planner Can be pre-computed using distance transform
 Informed search - some evaluation function is used Dijkstra algorithm shortest path A* algorithm heuristics for pruning the search D* dynamic version of")
20 Path Planning as search Various performance measures of search: Optimality, completeness, time and space complexity Uninformed search blind no information is gathered from the environment (BFS, DFS) Informed search - some evaluation function is used Dijkstra algorithm shortest path A* algorithm heuristics for pruning the search D* dynamic version of A*
21 Generalization of occupancy grid Occupancy grid cells are occupied or empty We can define more general notion of a cost C(x,y) is infinite for obstacles C(x,y) can be large for hard to traverse regions i.e. cost is inversely proportional to traversability You can also incorporate passenger comfort, related to roughness of terrain.
22 A* Complete provided finite boundary condition Optimal in terms of path cost Memory inefficient Exponential growth of search space with respect to the length of the solution How can we use it in partially known, or dynamically changing environment D* Same as Dijkstra different way of updating the cost of each node As long as heuristics under-estimates the cost to go A* is optimal In may practical problems it is hard to find good heuristics
 cost so far Heuristic function h(n) information used to find promising node to take next heuristics is admissible if it never overestimates the actual")
23 A* Extension to Dijkstra, tries to reduce the number of states Using heuristic estimate of the cost to go Evaluation function f(n) = g(n) + h(n) Operating cost function g(n) cost so far Heuristic function h(n) information used to find promising node to take next heuristics is admissible if it never overestimates the actual cost

24 A* Start => A => E => goal Nodes with higher or equal priority then goal can be pruned away There can still be shorter path through the remaining nodes

25 A* Keep on expanding nodes with the priority level lower then goal Path: Start => C = > K => Goal

26 Classical Motion Planning Given a continuous space with obstacles plan a path between configuration A and configuration B Given a point robot and a workspace described by polygons Large class of methods transform continuous space to discrete Roadmap methods Visibility graph Cell decomposition Retraction
27 Configuration Space Well, most robot is not a point and can have arbitrary shape What should we do if our robot is not a point? Convert rigid robots, articulated robots, etc. into points Apply algorithms for moving points
28 Configuration Space Workspace Configuration Space Robot Obstacle C-obstacle Robot y x for now C-obstacle is a polygon. how to compute C-space bit later
 of one-dimensional curves")
29 Roadmap Methods Capture the connectivity of C free with a roadmap (graph or network) of one-dimensional curves roadmap
30 Roadmap Methods Path Planning with a Roadmap Input: configurations q init and q goal, and B Output: a path in C free connecting q init and q goal 1. Build a roadmap in C free (preprocessing) roadmap nodes are free configurations two nodes connected by edge if can (easily) move between them 2. Connect q init and q goal to roadmap nodes v init and v goal 3. Find a path in the roadmap between v init and v goal - directly gives a path in C free difficult part
31 Visibility Graph A visibility graph of C-space for a given C-obstacle is an undirected graph G where nodes in G correspond to vertices of C-obstacle nodes connected by edge in G if they are connected by an edge in C-obstacle, or the straight line segment connecting them lies entirely in Cfree (could add q init and q goal as roadmap nodes)
32 Visibility Graph Brute Force Algorithm add all edges in C-obstacle to G for each pair of vertices (x, y) of C-obstacle, add the edge (x, y) to G if the straight line segment connecting them lies entirely in cl(c-free) test (x; y) for intersection with all O(n) edges of C- obstacle O(n 2 ) pairs to test, each test takes O(n) time Complexity: O(n 3 ), n is number of vertices in C-obstacle
33 Visibility Graph Visibility graphs good news are conceptually simple shortest paths (if the query cannot see each other) we have efficient algorithms if Workspace is polygonal O(n 2 ), where n is number of vertices of C-obstacle O(k + n log n), where k is number of edges in G we can make a 'reduced' visibility graph (don't need all edges)
 is a tangent segment iff L is tangent to C-obstacle at both x and y.")
34 Reduced Visibility Graph we don't really need all the edges in the visibility graph (even if we want shortest paths) Definition: Let L be the line passing through an edge (x; y) in the visibility graph G. The segment (x; y) is a tangent segment iff L is tangent to C-obstacle at both x and y. Line segment is tangent if extending the line beyond each of the end points would not intersect the obstacles CS633

35 Reduced Visibility Graph It turns out we need only keep convex vertices of C-obstacle non-cb edges that are tangent segments
36 Visibility Graph in 3-D Visibility graphs don't necessarily contain shortest paths in R 3 in fact finding shortest paths in R 3 is NP-hard [Canny 1988] (1 + ε²) approximation algorithm [Papadimitriou 1985] Bad news: Visibility graphs really only suitable for 2D C
37 Retraction Approach Basic Idea: 'retract' C free onto a 1-dimensional subset of itself (the roadmap). a map ρ : C free R, R C free, is a retraction iff it is continuous and its restriction to R is the identity map (i.e., ρ (R) = R) thus, ρ(x) R for all x C free and ρ(y) = y for all y R a retraction ρ : C free R is connectivity preserving iff for all x C free, x and ρ(x) belong to the same connected component of C free
38 Retraction Approach Fact: There exists a free path from q init to q goal iff there exists a path in R between ρ (qinit) and ρ (qgoal). This is why retractions make good roadmaps.
39 Retraction Approach Retraction Example: Generalized Voronoi Diagrams (or Medial axis) Generalized Voronoi Diagram Vor(C free ) = { q C free card(near(q)) > 1 } i.e., points in C free with at least two nearest neighbors in C free 's boundary
40 Voronoi Diagram for Point Sets Voronoi diagram of point set X consists of straight line segments, constructed by computing lines bisecting each pair of points and their intersections computing intersections of these lines keeping segments with more than one nearest neighbor segments of Vor(X) have largest clearance from X and regions identify closest point of X
41 Voronoi Diagram for Point Sets When C = R 2 and polygonal C-obstacle, Vor(Cfree) consists of a finite collection of straight line segments and parabolic curve segments (called arcs) straight arcs are defined by two vertices or two edges of C-obstacle, i.e., the set of points equally close to two points (or two line segments) is a line parabolic arcs are defined by one vertex and one edge of C-obstacle, i.e., the set of points equally close to a point and a line is a parabola
42 Voronoi Diagram for Point Sets Naive Method of Constucting V or (Cfree) compute all arcs (for each vertex-vertex, edge-edge, and vertex-edge pair) compute all intersection points (dividing arcs into segments) keep segments which are closest only to the vertices/ edges that defined them
 and ρ(q goal ), respectively 3.")
43 Retraction Retraction ρ : C free Vor(C free ) To find a path: 1. compute Vor(C free ) 2. find paths from q init and q goal to ρ(q init ) and ρ(q goal ), respectively 3. search Vor(C free ) for a set of arcs connecting ρ(q init ) and ρ(q goal )
44 Cell Decomposition Idea: decompose C free into a collection K of nonoverlapping cells such that the union of all the cells exactly equals the free C-space Cell Characteristics: geometry of cells should be simple so that it is easy to compute a path between any two configurations in a cell it should be pretty easy to test the adjacency of two cells, i.e., whether they share a boundary it should be pretty easy to find a path crossing the portion of the boundary shared by two adjacent cells Thus, cell boundaries correspond to 'criticalities' in C, i.e., something changes when a cell boundary is crossed. No such criticalities in C occur within a cell.
45 Cell Decomposition Preprocessing: represent C free as a collection of cells (connected regions of C free ) planning between configurations in the same cell should be 'easy' build connectivity graph representing adjacency relations between cells cells adjacent if can move directly between them Query: locate cells k init and k goal containing start and goal configurations search the connectivity graph for a 'channel' or sequence of adjacent cells connecting k init and k goal find a path that is contained in the channel of cells Difficult Two major variants of methods: exact cell decomposition: set of cells exactly covers C free complicated cells with irregular boundaries (contact constraints) harder to compute approximate cell decomposition: set of cells approximately covers C free simpler cells with more regular boundaries easier to compute
46 Trapezoidal Decomposition Basic Idea: at every vertex of C-obstacle, extend a vertical line up and down in Cfree until it touches a C- obstacle or the boundary of Cfree trapezoid





47 Trapezoidal Decomposition Sweep line algorithm Add vertical lines as we sweep from left to right Events need to be handled accordingly trapezoidal decomposition can be built in O(n log n) time
48 Approx. Cell Decomposition Construct a collection of non-overlapping cells such that the union of all the cells approximately covers the free C-space! Cell characteristics Cell should have simple shape Easy to test adjacency of two cells Easy to find path across two adjacent cells

49 Approx. Cell Decomposition Each cell is Empty Full Mixed Different resolution Different roadmap

50 Approx. Cell Decomposition Higher resolution around CBs

51 Approx. Cell Decomposition Hierarchical approach Find path using empty and mixed cells Further decompose mixed cells into smaller cells
52 Approx. Cell Decomposition Advantages: simple, uniform decomposition easy implementation adaptive Disadvantages: large storage requirement Lose completeness Bottom line 1: We sacrifice exactness for simplicity and efficiency Bottom line 2: Approx. cell decomposition methods are practically for lower dimension C, i.e., dof <5, b/c they generate too many cells, i.e. (N d ) cells in d dimension
53 Configuration Space Well, most robot is not a point and can have arbitrary shape What should we do if our robot is not a point? Convert rigid robots, articulated robots, etc. into points Apply algorithms for moving points

54 Configuration Space Mapping between the workspace and configuration space
55 Workspace Degree of freedom (DOF) α β
56 Configuration Space C-Space β= β α= α 180
57 C-Space β= β 100 α= α C-Space 180
58 C-Space β= β 80 α= α C-Space 180
59 C-Space β= β α= α C-Space 180
60 C-Space β= β α= α 110 C-Space 180
61 C-Space 180 β=15 β α= α 180 C-Space
62 Workspace Obstacle Workspace Workspace theta (x,y) obstacle Configuration (x,y,theta) (4,5,45)
63 C-Space Obstacle Th et a C-Obstacle Really look like this? Every point in the C-obst corresponds to the configuration where the robot would collide with the obstacle
64 Theta Finding a Path Find a path in workspace for a robot Find a path in C-space for a point Goal Initial

65 Motion Planning in C-space Simple workspace obstacle transformed Into complicated C-obstacle!! C-space Workspace C-obst C-obst obst obst C-obst C-obst obst obst robot robot x y Path is swept volume Path is 1D curve

66 Topology of the configuration pace The topology of C is usually not that of a Cartesian space R n. ϕ 2π C = S 1 x S 1 ϕ 0 2π φ φ
67 Example: rigid robot in 2-D workspace dim of configuration space =??? Topology??? R 2 x SO(1)
68 Example: articulated robot Number of DOFs? What is the topology? An articulated object is a set of rigid bodies connected at the joints.


69 Example: Multiple robots Given n robots in 2-D What are the possible representations? ROV, GAMMA group, UNC What is the number of dofs? J.J. Kuffner et al. 5 articulated robots
70 Computing C-obstacles For polygonal obstacles and polygonal translating robots how to compute C-obstacles Minkowski sum allows us to solve problems with translational robots

71 Minkowski sum of convex polygons The Minkowski sum of two convex polygons P and Q of m and n vertices respectively is a convex polygon P + Q of m + n vertices. The vertices of P + Q are the sums of vertices of P and Q. =
72 Minkowski Sum Minkowski sum P Q={p+q p P, q Q} P Q
73 Minkowski Sum Minkowski sum P Q={p+q p P, q Q} CS633
74 Minkowski Sum Minkowski sum P Q={p+q p P, q Q}
75 Minkowski Sum Minkowski sum P Q={p+q p P, q Q} =
76 Algorithm Sort normals to the edges of the polygon Every edge of C-obst is either edge of the polygon or edge of the robot. Every edge is used exactly once, we need to determine the ordering of the edges Sort inward angles on the robot counterclockwise Sort outward angles of the obstacle normals Use incrementally the edges which correspond to the sorted normals in the order they are encountered
77 Compute Minkowski Sum Convex object Use Gaussian map Compute convex hull of Point-based Minkowski sum (slower) 2D P Q P Q 3D [Fogel and Halperin 06]

78 Polygonal robot translating in 2-D workspace workspace configuration space The complexity of the Minkowski sum is O(n 2 ) in 2D
 where φ is in the range")
79 Robot with Rotations If a robot is allowed rotation in addition to translation in 2D then it has 3 DOF The configuration space is 3D: (x,y,φ) where φ is in the range [0:360)
80 Polygonal robot translating & rotating in 2-D workspace workspace configuration space

81 Polygonal robot translating & rotating in 2-D workspace θ y x
82 Mapping to C-Space The obstacles map to twisted pillars in C-Space They are no longer polygonal but are composed of curved faces and edges
83 Computing Free Space Exact cell decomposition in 3D is really hard Compute z: a finite number of slices for discrete angular values Each slice will be the representation of the free space for a purely translational problem Robot will either move within a slice (translating) or between slices (rotating)
84 Hard Motion Planning Configuration Space methods complex even for low dimensional configuration spaces Plus always guarantee finding a plan if it exists in finite time (or answer no) Idea behind sampling cased motion planning sacrifice completeness for efficiency weaker guarantee notion on probabilistic completeness
85 The Complexity of Motion Planning PSPACE General motion planning problem is PSPACE-hard [Reif 79, Hopcroft et al. 84 & 86] P PSPACE-complete [Canny 87] The best deterministic algorithm known has running time that is exponential in the dimension of the robot s C-space [Canny 86] C-space has high dimension - 6D for rigid body in 3D space simple obstacles have complex C-obstacles impractical to compute explicit representation of free space for more than 4 or 5 dof NP
 All these planning problems are considered in continuous")
86 Hard Motion Planning Problems The Alpha Puzzle Swapping Cubes Puzzle Separate two shapes (one considered robot) another obstacle Exchange the positions of two cubes (one needs move to empty space) All these planning problems are considered in continuous spaces
87 Probabilistic Methods Resort to sampling based methods Avoid computing C-obstacles Too difficult to compute efficiently Idea: Sacrifice completeness to gain simplicity and efficiency Probabilistic Methods Graph based Tree based


88 Sampling Based Motion Planning Geometric Models Sampling Based Motion Planner S Discrete Search C-space planning Idea : Generate random configurations Check whether they are collision free Connect them using Local planners
 If local planner is not successful in reducing the cost to go Switch to random walk mode from current node, terminate if node with lower g(q) is found or number of")
89 Probabilistic Motion Planning First encounter with randomized techniques in the context of potential field based methods Use random walk to escape local minima (May take long time) Idea potential function gives as a cost to go g(q) If local planner is not successful in reducing the cost to go Switch to random walk mode from current node, terminate if node with lower g(q) is found or number of iterations have been reached If better node has not been found back-track pick one of the nodes encounteted in Random walk and restart best first search
90 Probabilistic Roadmap Method [Kavraki, Svestka, Latombe,Overmars 1996] Explicit representation of the configuration space is unknown T h e t a
91 Probabilistic Roadmap Method C-space goal C-obst C-obst C-obst C-obst Roadmap Construction (Pre-processing) 1. Randomly generate robot configurations (nodes) - discard nodes that are invalid 2. Connect pairs of nodes to form roadmap - simple, deterministic local planner (e.g., straightline) - discard paths that are invalid start C-obst Query processing 1. Connect start and goal to roadmap 2. Find path in roadmap between start and goal - regenerate plans for edges in roadmap
92 Probabilistic Roadmap Method Important sub-routines Generate random configurations Local planners Distance metrics Selecting k-nearest neighbors (becoming dominant in high dimensional space) Collision detection (>80% computation)
93 PRMs: Pros & Cons sta rt C- obst C- obst C- obst C- obst C- obst C- obst goa l C- obst C- obst C- obst go al PRMs: The Good News 1. PRMs are probabilistically complete 2. PRMs apply easily to high-dimensional C-space 3. PRMs support fast queries w/ enough preprocessing Many success stories where PRMs solve previously unsolved problems PRMs: The Bad News 1. PRMs don t work as well for some problems: unlikely to sample nodes in narrow passages hard to sample/connect nodes on constraint surfaces sta rt
94 Related Work (selected) Probabilistic Roadmap Methods Uniform Sampling (original) [Kavraki, Latombe, Overmars, Svestka, 92, 94, 96] Obstacle-based PRM (OBPRM) [Amato et al, 98] PRM Roadmaps in Dilated Free space [Hsu et al, 98] Gaussian Sampling PRMs [Boor/Overmars/van der Steppen 99] Bridge test [Hsu et al 03] Visibility Roadmaps [Laumond et al 99] Using Medial Axis [Kavraki et al 99, Lien/Thomas/Wilmarth/ Amato/ Stiller 99, 03, Lin et al 00] Generating Contact Configurations [Xiao et al 99] Using workspace clues
95 An Obstacle-Based PRM To Navigate Narrow Passages we must sample in them most PRM nodes are where planning is easy (not needed) PRM Roadmap goal OBPRM Roadmap goal C-obst C-obst C-obst C-obst C-obst C-obst C-obst C-obst start start Idea: Can we sample nodes near C-obstacle surfaces? we cannot explicitly construct the C-obstacles... we do have models of the (workspace) obstacles...
96 Finding Points on C-obstacles Basic Idea (for workspace obstacle S) 2 1 C-obst Find a point in S s C-obstacle (robot placement colliding with S) 2. Select a random direction in C- space 3. Find a free point in that direction 4. Find boundary point between them using binary search (collision checks) Note: we can use more sophisticated heuristics to try to cover C-obstacle

97 OBPRM
98 Gaussian Sampling PRM 1. Find a point in S s C-obstacle (robot placement colliding with S) d 1 C-obst 2. Find another point that is within distance d to the first point, where d is a random variable in a Gaussian distribution Note 2 3. Keep the second point if it is collision free Two paradigms: (1) OBPRM: Fix the samples (2) Gaussian PRM: Filter the samples None of these methods can (be proved to) provide guarantee that the samples in the narrow passage will increase!

99 Gaussians
![Related Work (selected) Probabilistic Roadmap Methods Uniform Sampling (original) [Kavraki, Latombe, Overmars, Svestka, 92, 94, 96] Obstacle-based PRM (OBPRM) [Amato et al, 98] PRM Roadmaps in](/docs-images/83/88614270/images/100-0.jpg "Dilated Free space [Hsu et al, 98] Gaussian Sampling PRMs [Boor/Overmars/van der Steppen 99] Bridge test [Hsu et al 03] Visibility Roadmaps [Laumond et al 99] Using Medial Axis [Kavraki et al 99,")
100 Related Work (selected) Probabilistic Roadmap Methods Uniform Sampling (original) [Kavraki, Latombe, Overmars, Svestka, 92, 94, 96] Obstacle-based PRM (OBPRM) [Amato et al, 98] PRM Roadmaps in Dilated Free space [Hsu et al, 98] Gaussian Sampling PRMs [Boor/Overmars/van der Steppen 99] Bridge test [Hsu et al 03] Visibility Roadmaps [Laumond et al 99] Using Medial Axis [Kavraki et al 99, Lien/Thomas/Wilmarth/Amato/Stiller 99, 03, Lin et al 00] Generating Contact Configurations [Xiao et al 99] Using workspace clues
101 Issues How do we determine a random free configuration We would like to sample nodes uniformly from C_free Draw each of the coordinates from the interval of corresponding DOF use uniform probability per interval For each sample check for collision between the robot and obstacles and robot itself If collision free add to V otherwise discard Collision detection and sampling large topics
102 Collision Detection Treated as black box - takes most of the computation In 2D convex robot and obstacle, there exist linear time collision detection algorithms For more complex non-convex bodies hierarchical methods (create bounded regions to avoid checking bodies which are far apart - have a quick way of computing whether two regions intersect (Bound. Regions: spheres, axis aligned boxes), the composite bounding regions are represented by trees Check for free collision free configuration Check for free collision free path segment Consider that the path is a straight line, parametrized by [0,1], sample the interval and check each sample whether its collision free There exist algorithms with guarantees trickier to implement
103 Planning in high dimensional spaces Single query planning (greedy technique can take a long time) Multiple query planning spreads out uniformly, requires lot of samples to cover the space Next incremental sampling and search methods that yields good performance without parameters tunning. Idea gradually construct search tree, such that it densely covers the space
104 Incremental Sampling and Searching Single query model given start and goal q find a path Analogy with the discrete search algorithms Samples are states, edges are paths connected them (as opposed to actions previously) Graphs are undirected; Ingredients 1. Initialize the graph 2. Select vertex for expansion 3. Generate set of new vertices 4. For some new vertices run a local planner and check whether its collision free 5. If yes insert an edge to the graph 6. Keep on going until termination condition is satisfied
105 Incremental Search and Sample Why not just discretizing configuration space? For high dimensions large number of states can be wasted exploring various cavities of the C-space For low dim spaces grid points them selves can serve as roadmap points (need to be checked for collisions etc) How to choose a resolution of the discretization (start coarse, iteratively refine) Another option abandon discretization and work with continuous problem (like randomized potential fields) or RRT s
106 Rapidly-Exploring Random Tree (RRT) Tree Based single shot planners compute the respresentation of C-free for single start and goal RRTs: Rapidly-exploring Random Trees Rapidly-exploring random trees: Progress and prospects. S. M. LaValle and J. J. Kuffner. In Proceedings Workshop on the Algorithmic Foundations of Robotics, 2000.) Incrementally builds the roadmap tree Extends to more advanced planning techniques Integrates the control inputs to ensure that the kinodynamic constraints are satisfied
107 Rapidly-Exploring Random Trees
108 RRT s

109 RRT s Details: Step length: how far to sample Sample just at the end point Sample all along, small steps
110 Naïve Random Tree
111 RRT s are biased towards large Voronoi cells The nodes most likely to be closest to a randomly chosen point in state space are those with the largest Voronoi regions. The largest Voronoi regions belong to nodes along the frontier of the tree, so these frontier nodes are automatically favored when choosing which node to expand.

112 Grow two RRT s together
113 Two RRT s
114 Two RRT s
115 Two RRT s
116 Two RRT s
117 Two RRT s
118 Two RRT s
119 Two RRT s
120 Taking actions into account
121 How it Works Build a rapidly-exploring random tree in state space (X), starting at s start Stop when tree gets sufficiently close to s goal Start Goal
122 Building an RRT To extend an RRT: Pick a random point a in X Find b, the node of the tree closest to a Find control inputs u to steer the robot from b to a u b a
123 To extend an RRT (cont.) Apply control inputs u for time δ, so robot reaches c If no collisions occur in getting from a to c, add c to RRT and record u with new edge Building an RRT u b c a
124 Executing the Path Once the RRT reaches s goal Backtrack along tree to identify edges that lead from s start to s goal Drive robot using control inputs stored along edges in the tree




125 Problem of Simple RRT Planner Problem: ordinary RRT explores X uniformly slow convergence Solution: bias distribution towards the goal once in a while choose goal as new random configuration (5-10%) If goal is choose 100% time then it is randomized potential planner
126 Bidirectional Planners Build two RRTs, from start and goal state Complication: need to connect two RRTs local planner will not work (dynamic constraints) bias the distribution, so that the trees meet
127 Bidirectional RRT Example

128 Articulated Robot example
129 RRT s Link Issues/problems Metric sensitivity Nearest neighbour efficiency Optimal sampling strategy Balance between greedy search and exploration Applications in mobile robotics, manipulation, humanoids, biology, drug design, areo-space, animation Extensions real-time RRT s, anytime RRT s dynamic domains RRT sm deterministic RRTs, hybrid RRT s
130 Efficient nearest neighbour algorithms How to find NN in high dimensional spaces KD trees recursively choose a plane P that splits the set evenly in a coordinate direction Store P at the node Apply to children sets Sl and Sr Requires O(dn) storage Various hashing strategies
131 Expansion Space Tree (EST) Path Planning in Expansive Configuration Spaces, D. Hsu, J.C. Latombe, & R. Motwani, Grow two trees from Init position and Goal configurations. 2. Randomly sample nodes around existing nodes. 3. Connect a node in the tree rooted at Init to a node in the tree rooted at the Goal. Init Goal Expansion + Connection
132 Expansion 1. Pick a node x with probability 1/w(x). 2. Randomly sample k points around x. 3. For each sample y, calculate w(y) number of samples in neighbourhood d of y 4. which gives probability 1/w(y) with which the vertex will be taken Disk with radius d, w(x)=3 root
133 Expansion 1. Pick a node x with probability 1/w(x). 2. Randomly sample k points around x. 3. For each sample y, calculate w(y), which gives probability 1/w(y). 1/w(y 1 )=1/5 root 1 2 3
134 Expansion 1. Pick a node x with probability 1/w(x). 2. Randomly sample k points around x. 3. For each sample y, calculate w(y), which gives probability 1/w(y). 1/w(y 2 )=1/2 root 1 2 3
135 Expansion 1. Pick a node x with probability 1/w(x). 2. Randomly sample k points around x. 3. For each sample y, calculate w(y), which gives probability 1/w(y). 1/w(y3)=1/3 root 1 2 3
136 Expansion 1. Pick a node x with probability 1/w(x). 2. Randomly sample k points around x. 3. For each sample y, calculate w(y), which gives probability 1/w(y). If y (a) has higher probability; (b) collision free; (c) can see x then add y into the tree. root Requires tunning of various parameters k, d, number of iter

137 Computed example
138 Conclusion Motion planning is difficult (intractable) Roadmap methods Probabilistic Motion Planners We will return to planning when considering partial information, dynamically changing worlds, uncertainty


139 What is not covered? Other types of motion planning With constraints Close-chain constraint Nonholonomic constraint Differential constraints Manipulate planning Assembly planning Planning with uncertainty Planning for multiple robots, dynamic env Planning for highly articulated objects Planning for deformable objects Little Seiko
 Robot Motion Planning. J.C. Latombe.")

140 Additional Readings Gross motion planning a survey, Y. K. Hwang and N. Ahuja, ACM Computing Surveys, 1992 (survey paper) Robot Motion Planning. J.C. Latombe. Kluwer Academic Publishers, Boston, MA, Motion Planning: A Journey of Robots, Molecules, Digital Actors, and Other Artifacts. Jean-Claude Latombe, IJRR, 1999 (survey paper) Planning Algorithms, Steven LaValle, 2006, Cambridge University Pres, (Free download at CS633
6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning
 6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2012 Figures by Nancy Amato, Rodney Brooks, Vijay Kumar Reading:
6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2012 Figures by Nancy Amato, Rodney Brooks, Vijay Kumar Reading:
Probabilistic Motion Planning: Algorithms and Applications
 Probabilistic Motion Planning: Algorithms and Applications Jyh-Ming Lien Department of Computer Science George Mason University Motion Planning in continuous spaces (Basic) Motion Planning (in a nutshell):
Probabilistic Motion Planning: Algorithms and Applications Jyh-Ming Lien Department of Computer Science George Mason University Motion Planning in continuous spaces (Basic) Motion Planning (in a nutshell):
6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning
 6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2011 Figures by Nancy Amato, Rodney Brooks, Vijay Kumar Reading:
6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2011 Figures by Nancy Amato, Rodney Brooks, Vijay Kumar Reading:
Configuration Space of a Robot
 Robot Path Planning Overview: 1. Visibility Graphs 2. Voronoi Graphs 3. Potential Fields 4. Sampling-Based Planners PRM: Probabilistic Roadmap Methods RRTs: Rapidly-exploring Random Trees Configuration
Robot Path Planning Overview: 1. Visibility Graphs 2. Voronoi Graphs 3. Potential Fields 4. Sampling-Based Planners PRM: Probabilistic Roadmap Methods RRTs: Rapidly-exploring Random Trees Configuration
CS 4649/7649 Robot Intelligence: Planning
 CS 4649/7649 Robot Intelligence: Planning Probabilistic Roadmaps Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu) 1
CS 4649/7649 Robot Intelligence: Planning Probabilistic Roadmaps Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu) 1
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning
 Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning
 Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Robot Motion Planning
 Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
Geometric Path Planning McGill COMP 765 Oct 12 th, 2017
 Geometric Path Planning McGill COMP 765 Oct 12 th, 2017 The Motion Planning Problem Intuition: Find a safe path/trajectory from start to goal More precisely: A path is a series of robot configurations
Geometric Path Planning McGill COMP 765 Oct 12 th, 2017 The Motion Planning Problem Intuition: Find a safe path/trajectory from start to goal More precisely: A path is a series of robot configurations
ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space
 ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Tianyu Wang: tiw161@eng.ucsd.edu Yongxi Lu: yol070@eng.ucsd.edu
ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Tianyu Wang: tiw161@eng.ucsd.edu Yongxi Lu: yol070@eng.ucsd.edu
Sampling-based Planning 2
 RBE MOTION PLANNING Sampling-based Planning 2 Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Problem with KD-tree RBE MOTION PLANNING Curse of dimension
RBE MOTION PLANNING Sampling-based Planning 2 Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Problem with KD-tree RBE MOTION PLANNING Curse of dimension
for Motion Planning RSS Lecture 10 Prof. Seth Teller
 Configuration Space for Motion Planning RSS Lecture 10 Monday, 8 March 2010 Prof. Seth Teller Siegwart & Nourbahksh S 6.2 (Thanks to Nancy Amato, Rod Brooks, Vijay Kumar, and Daniela Rus for some of the
Configuration Space for Motion Planning RSS Lecture 10 Monday, 8 March 2010 Prof. Seth Teller Siegwart & Nourbahksh S 6.2 (Thanks to Nancy Amato, Rod Brooks, Vijay Kumar, and Daniela Rus for some of the
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Motion Planning 1 Retraction and Cell Decomposition
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Motion Planning 1 Retraction and Cell Decomposition motivation robots are expected to perform tasks in workspaces populated by obstacles autonomy requires
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Motion Planning 1 Retraction and Cell Decomposition motivation robots are expected to perform tasks in workspaces populated by obstacles autonomy requires
Advanced Robotics Path Planning & Navigation
 Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Sung-Eui Yoon ( 윤성의 )
") Path Planning for Point Robots Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Motion planning framework Classic motion planning approaches 2 3 Configuration Space:
Path Planning for Point Robots Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Motion planning framework Classic motion planning approaches 2 3 Configuration Space:
Collision Detection. Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering
 RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
Sampling-Based Robot Motion Planning. Lydia Kavraki Department of Computer Science Rice University Houston, TX USA
 Sampling-Based Robot Motion Planning Lydia Kavraki Department of Computer Science Rice University Houston, TX USA Motion planning: classical setting Go from Start to Goal without collisions and while respecting
Sampling-Based Robot Motion Planning Lydia Kavraki Department of Computer Science Rice University Houston, TX USA Motion planning: classical setting Go from Start to Goal without collisions and while respecting
Motion Planning 2D. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Motion Planning 2D Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Tratto dai corsi: CS 326A: Motion Planning ai.stanford.edu/~latombe/cs326/2007/index.htm Prof. J.C. Latombe Stanford
Motion Planning 2D Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Tratto dai corsi: CS 326A: Motion Planning ai.stanford.edu/~latombe/cs326/2007/index.htm Prof. J.C. Latombe Stanford
Motion Planning, Part III Graph Search, Part I. Howie Choset
 Motion Planning, Part III Graph Search, Part I Howie Choset Happy President s Day The Configuration Space What it is A set of reachable areas constructed from knowledge of both the robot and the world
Motion Planning, Part III Graph Search, Part I Howie Choset Happy President s Day The Configuration Space What it is A set of reachable areas constructed from knowledge of both the robot and the world
Path Planning. Jacky Baltes Dept. of Computer Science University of Manitoba 11/21/10
 Path Planning Jacky Baltes Autonomous Agents Lab Department of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky Path Planning Jacky Baltes Dept. of
Path Planning Jacky Baltes Autonomous Agents Lab Department of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky Path Planning Jacky Baltes Dept. of
6.141: Robotics systems and science Lecture 10: Implementing Motion Planning
 6.141: Robotics systems and science Lecture 10: Implementing Motion Planning Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2011 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
6.141: Robotics systems and science Lecture 10: Implementing Motion Planning Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2011 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
Robot Motion Planning
 Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
Probabilistic Methods for Kinodynamic Path Planning
 16.412/6.834J Cognitive Robotics February 7 th, 2005 Probabilistic Methods for Kinodynamic Path Planning Based on Past Student Lectures by: Paul Elliott, Aisha Walcott, Nathan Ickes and Stanislav Funiak
16.412/6.834J Cognitive Robotics February 7 th, 2005 Probabilistic Methods for Kinodynamic Path Planning Based on Past Student Lectures by: Paul Elliott, Aisha Walcott, Nathan Ickes and Stanislav Funiak
Path Planning for Point Robots. NUS CS 5247 David Hsu
 Path Planning for Point Robots NUS CS 5247 David Hsu Problem Input Robot represented as a point in the plane Obstacles represented as polygons Initial and goal positions Output A collision-free path between
Path Planning for Point Robots NUS CS 5247 David Hsu Problem Input Robot represented as a point in the plane Obstacles represented as polygons Initial and goal positions Output A collision-free path between
Road Map Methods. Including material from Howie Choset / G.D. Hager S. Leonard
 Road Map Methods Including material from Howie Choset The Basic Idea Capture the connectivity of Q free by a graph or network of paths. 16-735, Howie Choset, with significant copying from who loosely based
Road Map Methods Including material from Howie Choset The Basic Idea Capture the connectivity of Q free by a graph or network of paths. 16-735, Howie Choset, with significant copying from who loosely based
Approximate path planning. Computational Geometry csci3250 Laura Toma Bowdoin College
 Approximate path planning Computational Geometry csci3250 Laura Toma Bowdoin College Outline Path planning Combinatorial Approximate Combinatorial path planning Idea: Compute free C-space combinatorially
Approximate path planning Computational Geometry csci3250 Laura Toma Bowdoin College Outline Path planning Combinatorial Approximate Combinatorial path planning Idea: Compute free C-space combinatorially
Can work in a group of at most 3 students.! Can work individually! If you work in a group of 2 or 3 students,!
 Assignment 1 is out! Due: 26 Aug 23:59! Submit in turnitin! Code + report! Can work in a group of at most 3 students.! Can work individually! If you work in a group of 2 or 3 students,! Each member must
Assignment 1 is out! Due: 26 Aug 23:59! Submit in turnitin! Code + report! Can work in a group of at most 3 students.! Can work individually! If you work in a group of 2 or 3 students,! Each member must
Visibility Graph. How does a Mobile Robot get from A to B?
 Robot Path Planning Things to Consider: Spatial reasoning/understanding: robots can have many dimensions in space, obstacles can be complicated Global Planning: Do we know the environment apriori? Online
Robot Path Planning Things to Consider: Spatial reasoning/understanding: robots can have many dimensions in space, obstacles can be complicated Global Planning: Do we know the environment apriori? Online
Introduction to State-of-the-art Motion Planning Algorithms. Presented by Konstantinos Tsianos
 Introduction to State-of-the-art Motion Planning Algorithms Presented by Konstantinos Tsianos Robots need to move! Motion Robot motion must be continuous Geometric constraints Dynamic constraints Safety
Introduction to State-of-the-art Motion Planning Algorithms Presented by Konstantinos Tsianos Robots need to move! Motion Robot motion must be continuous Geometric constraints Dynamic constraints Safety
Path Planning. Marcello Restelli. Dipartimento di Elettronica e Informazione Politecnico di Milano tel:
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02 2399 3470 Path Planning Robotica for Computer Engineering students A.A. 2006/2007
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02 2399 3470 Path Planning Robotica for Computer Engineering students A.A. 2006/2007
Probabilistic roadmaps for efficient path planning
 Probabilistic roadmaps for efficient path planning Dan A. Alcantara March 25, 2007 1 Introduction The problem of finding a collision-free path between points in space has applications across many different
Probabilistic roadmaps for efficient path planning Dan A. Alcantara March 25, 2007 1 Introduction The problem of finding a collision-free path between points in space has applications across many different
Robot Motion Control Matteo Matteucci
 Robot Motion Control Open loop control A mobile robot is meant to move from one place to another Pre-compute a smooth trajectory based on motion segments (e.g., line and circle segments) from start to
Robot Motion Control Open loop control A mobile robot is meant to move from one place to another Pre-compute a smooth trajectory based on motion segments (e.g., line and circle segments) from start to
Spring 2010: Lecture 9. Ashutosh Saxena. Ashutosh Saxena
 CS 4758/6758: Robot Learning Spring 2010: Lecture 9 Why planning and control? Video Typical Architecture Planning 0.1 Hz Control 50 Hz Does it apply to all robots and all scenarios? Previous Lecture: Potential
CS 4758/6758: Robot Learning Spring 2010: Lecture 9 Why planning and control? Video Typical Architecture Planning 0.1 Hz Control 50 Hz Does it apply to all robots and all scenarios? Previous Lecture: Potential
CS Path Planning
 Why Path Planning? CS 603 - Path Planning Roderic A. Grupen 4/13/15 Robotics 1 4/13/15 Robotics 2 Why Motion Planning? Origins of Motion Planning Virtual Prototyping! Character Animation! Structural Molecular
Why Path Planning? CS 603 - Path Planning Roderic A. Grupen 4/13/15 Robotics 1 4/13/15 Robotics 2 Why Motion Planning? Origins of Motion Planning Virtual Prototyping! Character Animation! Structural Molecular
Motion Planning. Howie CHoset
 Motion Planning Howie CHoset Questions Where are we? Where do we go? Which is more important? Encoders Encoders Incremental Photodetector Encoder disk LED Photoemitter Encoders - Incremental Encoders -
Motion Planning Howie CHoset Questions Where are we? Where do we go? Which is more important? Encoders Encoders Incremental Photodetector Encoder disk LED Photoemitter Encoders - Incremental Encoders -
Path Planning among Movable Obstacles: a Probabilistically Complete Approach
 Path Planning among Movable Obstacles: a Probabilistically Complete Approach Jur van den Berg 1, Mike Stilman 2, James Kuffner 3, Ming Lin 1, and Dinesh Manocha 1 1 Department of Computer Science, University
Path Planning among Movable Obstacles: a Probabilistically Complete Approach Jur van den Berg 1, Mike Stilman 2, James Kuffner 3, Ming Lin 1, and Dinesh Manocha 1 1 Department of Computer Science, University
Trajectory Optimization
 Trajectory Optimization Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We heard about RRT*, a sampling-based planning in high-dimensional cost
Trajectory Optimization Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We heard about RRT*, a sampling-based planning in high-dimensional cost
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) How to generate Delaunay Triangulation? (3 pts) Explain the difference
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) How to generate Delaunay Triangulation? (3 pts) Explain the difference
Motion Planning, Part IV Graph Search Part II. Howie Choset
 Motion Planning, Part IV Graph Search Part II Howie Choset Map-Based Approaches: Properties of a roadmap: Roadmap Theory Accessibility: there exists a collision-free path from the start to the road map
Motion Planning, Part IV Graph Search Part II Howie Choset Map-Based Approaches: Properties of a roadmap: Roadmap Theory Accessibility: there exists a collision-free path from the start to the road map
Lecture 3: Motion Planning (cont.)
") CS 294-115 Algorithmic Human-Robot Interaction Fall 2016 Lecture 3: Motion Planning (cont.) Scribes: Molly Nicholas, Chelsea Zhang 3.1 Previously in class... Recall that we defined configuration spaces.
CS 294-115 Algorithmic Human-Robot Interaction Fall 2016 Lecture 3: Motion Planning (cont.) Scribes: Molly Nicholas, Chelsea Zhang 3.1 Previously in class... Recall that we defined configuration spaces.
Motion Planning. COMP3431 Robot Software Architectures
 Motion Planning COMP3431 Robot Software Architectures Motion Planning Task Planner can tell the robot discrete steps but can t say how to execute them Discrete actions must be turned into operations in
Motion Planning COMP3431 Robot Software Architectures Motion Planning Task Planner can tell the robot discrete steps but can t say how to execute them Discrete actions must be turned into operations in
Part I Part 1 Sampling-based Motion Planning
 Overview of the Lecture Randomized Sampling-based Motion Planning Methods Jan Faigl Department of Computer Science Faculty of Electrical Engineering Czech Technical University in Prague Lecture 05 B4M36UIR
Overview of the Lecture Randomized Sampling-based Motion Planning Methods Jan Faigl Department of Computer Science Faculty of Electrical Engineering Czech Technical University in Prague Lecture 05 B4M36UIR
Part I Part 1 Sampling-based Motion Planning
 Overview of the Lecture Randomized Sampling-based Motion Planning Methods Jan Faigl Department of Computer Science Faculty of Electrical Engineering Czech Technical University in Prague Lecture 06 B4M36UIR
Overview of the Lecture Randomized Sampling-based Motion Planning Methods Jan Faigl Department of Computer Science Faculty of Electrical Engineering Czech Technical University in Prague Lecture 06 B4M36UIR
Navigation and Metric Path Planning
 Navigation and Metric Path Planning October 4, 2011 Minerva tour guide robot (CMU): Gave tours in Smithsonian s National Museum of History Example of Minerva s occupancy map used for navigation Objectives
Navigation and Metric Path Planning October 4, 2011 Minerva tour guide robot (CMU): Gave tours in Smithsonian s National Museum of History Example of Minerva s occupancy map used for navigation Objectives
CS4733 Class Notes. 1 2-D Robot Motion Planning Algorithm Using Grown Obstacles
 CS4733 Class Notes 1 2-D Robot Motion Planning Algorithm Using Grown Obstacles Reference: An Algorithm for Planning Collision Free Paths Among Poyhedral Obstacles by T. Lozano-Perez and M. Wesley. This
CS4733 Class Notes 1 2-D Robot Motion Planning Algorithm Using Grown Obstacles Reference: An Algorithm for Planning Collision Free Paths Among Poyhedral Obstacles by T. Lozano-Perez and M. Wesley. This
Lecture Schedule Week Date Lecture (W: 3:05p-4:50, 7-222)
") 2017 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (W: 3:05p-4:50, 7-222) 1 26-Jul Introduction + 2 2-Aug Representing Position
2017 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (W: 3:05p-4:50, 7-222) 1 26-Jul Introduction + 2 2-Aug Representing Position
Collision Detection. These slides are mainly from Ming Lin s course notes at UNC Chapel Hill
 Collision Detection These slides are mainly from Ming Lin s course notes at UNC Chapel Hill http://www.cs.unc.edu/~lin/comp259-s06/ Computer Animation ILE5030 Computer Animation and Special Effects 2 Haptic
Collision Detection These slides are mainly from Ming Lin s course notes at UNC Chapel Hill http://www.cs.unc.edu/~lin/comp259-s06/ Computer Animation ILE5030 Computer Animation and Special Effects 2 Haptic
vizmo++: a Visualization, Authoring, and Educational Tool for Motion Planning
 vizmo++: a Visualization, Authoring, and Educational Tool for Motion Planning Aimée Vargas E. Jyh-Ming Lien Nancy M. Amato. aimee@cs.tamu.edu neilien@cs.tamu.edu amato@cs.tamu.edu Technical Report TR05-011
vizmo++: a Visualization, Authoring, and Educational Tool for Motion Planning Aimée Vargas E. Jyh-Ming Lien Nancy M. Amato. aimee@cs.tamu.edu neilien@cs.tamu.edu amato@cs.tamu.edu Technical Report TR05-011
Configuration Space. Ioannis Rekleitis
 Configuration Space Ioannis Rekleitis Configuration Space Configuration Space Definition A robot configuration is a specification of the positions of all robot points relative to a fixed coordinate system
Configuration Space Ioannis Rekleitis Configuration Space Configuration Space Definition A robot configuration is a specification of the positions of all robot points relative to a fixed coordinate system
Discrete Motion Planning
 RBE MOTION PLANNING Discrete Motion Planning Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Announcement Homework 1 is out Due Date - Feb 1 Updated
RBE MOTION PLANNING Discrete Motion Planning Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Announcement Homework 1 is out Due Date - Feb 1 Updated
Path Planning. Ioannis Rekleitis
 Path Planning Ioannis Rekleitis Outline Path Planning Visibility Graph Potential Fields Bug Algorithms Skeletons/Voronoi Graphs C-Space CSCE-574 Robotics 2 Mo+on Planning The ability to go from A to B
Path Planning Ioannis Rekleitis Outline Path Planning Visibility Graph Potential Fields Bug Algorithms Skeletons/Voronoi Graphs C-Space CSCE-574 Robotics 2 Mo+on Planning The ability to go from A to B
Manipula0on Algorithms Mo0on Planning. Mo#on Planning I. Katharina Muelling (NREC, Carnegie Mellon University) 1
 1") 16-843 Manipula0on Algorithms Mo0on Planning Mo#on Planning I Katharina Muelling (NREC, Carnegie Mellon University) 1 Configura0on Space Obstacles Star Algorithm Convex robot, transla#on C obs : convex
16-843 Manipula0on Algorithms Mo0on Planning Mo#on Planning I Katharina Muelling (NREC, Carnegie Mellon University) 1 Configura0on Space Obstacles Star Algorithm Convex robot, transla#on C obs : convex
Computational Geometry csci3250. Laura Toma. Bowdoin College
 Computational Geometry csci3250 Laura Toma Bowdoin College Motion Planning Input: a robot R and a set of obstacles S = {O 1, O 2, } start position p start end position p end Find a path from start to end
Computational Geometry csci3250 Laura Toma Bowdoin College Motion Planning Input: a robot R and a set of obstacles S = {O 1, O 2, } start position p start end position p end Find a path from start to end
Shorter, Smaller, Tighter Old and New Challenges
 How can Computational Geometry help Robotics and Automation: Shorter, Smaller, Tighter Old and New Challenges Dan Halperin School of Computer Science Tel Aviv University Algorithms in the Field/CG, CG
How can Computational Geometry help Robotics and Automation: Shorter, Smaller, Tighter Old and New Challenges Dan Halperin School of Computer Science Tel Aviv University Algorithms in the Field/CG, CG
Probabilistic Roadmap Planner with Adaptive Sampling Based on Clustering
 Proceedings of the 2nd International Conference of Control, Dynamic Systems, and Robotics Ottawa, Ontario, Canada, May 7-8 2015 Paper No. 173 Probabilistic Roadmap Planner with Adaptive Sampling Based
Proceedings of the 2nd International Conference of Control, Dynamic Systems, and Robotics Ottawa, Ontario, Canada, May 7-8 2015 Paper No. 173 Probabilistic Roadmap Planner with Adaptive Sampling Based
Sampling-Based Motion Planning
 Sampling-Based Motion Planning Pieter Abbeel UC Berkeley EECS Many images from Lavalle, Planning Algorithms Motion Planning Problem Given start state x S, goal state x G Asked for: a sequence of control
Sampling-Based Motion Planning Pieter Abbeel UC Berkeley EECS Many images from Lavalle, Planning Algorithms Motion Planning Problem Given start state x S, goal state x G Asked for: a sequence of control
Motion Planning with Dynamics, Physics based Simulations, and Linear Temporal Objectives. Erion Plaku
 Motion Planning with Dynamics, Physics based Simulations, and Linear Temporal Objectives Erion Plaku Laboratory for Computational Sensing and Robotics Johns Hopkins University Frontiers of Planning The
Motion Planning with Dynamics, Physics based Simulations, and Linear Temporal Objectives Erion Plaku Laboratory for Computational Sensing and Robotics Johns Hopkins University Frontiers of Planning The
Robotic Motion Planning: Cell Decompositions (with some discussion on coverage and pursuer/evader)
") Robotic Motion Planning: Cell Decompositions (with some discussion on coverage and pursuer/evader) Robotics Institute 16-735 http://voronoi.sbp.ri.cmu.edu/~motion Howie Choset http://voronoi.sbp.ri.cmu.edu/~choset
Robotic Motion Planning: Cell Decompositions (with some discussion on coverage and pursuer/evader) Robotics Institute 16-735 http://voronoi.sbp.ri.cmu.edu/~motion Howie Choset http://voronoi.sbp.ri.cmu.edu/~choset
Assignment 1 is out! Due: 9 Sep 23:59! Can work in a group of 2-3 students.! NO cheating!!!! Submit in turnitin! Code + report!
 Assignment 1 is out! Due: 9 Sep 23:59! Submit in turnitin! Code + report! Can work in a group of 2-3 students.! Please register your group in the website linked from the assignment description before tomorrow
Assignment 1 is out! Due: 9 Sep 23:59! Submit in turnitin! Code + report! Can work in a group of 2-3 students.! Please register your group in the website linked from the assignment description before tomorrow
Robotics Tasks. CS 188: Artificial Intelligence Spring Manipulator Robots. Mobile Robots. Degrees of Freedom. Sensors and Effectors
 CS 188: Artificial Intelligence Spring 2006 Lecture 5: Robot Motion Planning 1/31/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Motion planning (today) How to move from
CS 188: Artificial Intelligence Spring 2006 Lecture 5: Robot Motion Planning 1/31/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Motion planning (today) How to move from
EE631 Cooperating Autonomous Mobile Robots
 EE631 Cooperating Autonomous Mobile Robots Lecture 3: Path Planning Algorithm Prof. Yi Guo ECE Dept. Plan Representing the Space Path Planning Methods A* Search Algorithm D* Search Algorithm Representing
EE631 Cooperating Autonomous Mobile Robots Lecture 3: Path Planning Algorithm Prof. Yi Guo ECE Dept. Plan Representing the Space Path Planning Methods A* Search Algorithm D* Search Algorithm Representing
Motion Planning: Probabilistic Roadmaps. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Motion Planning: Probabilistic Roadmaps Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Tratto dalla lezione: Basic Motion Planning for a Point Robot CS 326A: Motion Planning ai.stanford.edu/~latombe/cs326/2007/index.htm
Motion Planning: Probabilistic Roadmaps Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Tratto dalla lezione: Basic Motion Planning for a Point Robot CS 326A: Motion Planning ai.stanford.edu/~latombe/cs326/2007/index.htm
video 1 video 2 Motion Planning (It s all in the discretization) Digital Actors Basic problem Basic problem Two Possible Discretizations
 Digital Actors Basic problem Basic problem Two Possible Discretizations") Motion Planning (It s all in the discretization) Motion planning is the ability for an agent to compute its own motions in order to achieve certain goals. ll autonomous robots and digital actors should
Motion Planning (It s all in the discretization) Motion planning is the ability for an agent to compute its own motions in order to achieve certain goals. ll autonomous robots and digital actors should
II. RELATED WORK. A. Probabilistic roadmap path planner
 Gaussian PRM Samplers for Dynamic Configuration Spaces Yu-Te Lin and Shih-Chia Cheng Computer Science Department Stanford University Stanford, CA 94305, USA {yutelin, sccheng}@cs.stanford.edu SUID: 05371954,
Gaussian PRM Samplers for Dynamic Configuration Spaces Yu-Te Lin and Shih-Chia Cheng Computer Science Department Stanford University Stanford, CA 94305, USA {yutelin, sccheng}@cs.stanford.edu SUID: 05371954,
Computer Game Programming Basic Path Finding
 15-466 Computer Game Programming Basic Path Finding Robotics Institute Path Planning Sven Path Planning needs to be very fast (especially for games with many characters) needs to generate believable paths
15-466 Computer Game Programming Basic Path Finding Robotics Institute Path Planning Sven Path Planning needs to be very fast (especially for games with many characters) needs to generate believable paths
Planning in Mobile Robotics
 Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
Advanced Robotics Path Planning & Navigation
 Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Nonholonomic motion planning for car-like robots
 Nonholonomic motion planning for car-like robots A. Sánchez L. 2, J. Abraham Arenas B. 1, and René Zapata. 2 1 Computer Science Dept., BUAP Puebla, Pue., México {aarenas}@cs.buap.mx 2 LIRMM, UMR5506 CNRS,
Nonholonomic motion planning for car-like robots A. Sánchez L. 2, J. Abraham Arenas B. 1, and René Zapata. 2 1 Computer Science Dept., BUAP Puebla, Pue., México {aarenas}@cs.buap.mx 2 LIRMM, UMR5506 CNRS,
Lecture 3: Motion Planning 2
 CS 294-115 Algorithmic Human-Robot Interaction Fall 2017 Lecture 3: Motion Planning 2 Scribes: David Chan and Liting Sun - Adapted from F2016 Notes by Molly Nicholas and Chelsea Zhang 3.1 Previously Recall
CS 294-115 Algorithmic Human-Robot Interaction Fall 2017 Lecture 3: Motion Planning 2 Scribes: David Chan and Liting Sun - Adapted from F2016 Notes by Molly Nicholas and Chelsea Zhang 3.1 Previously Recall
Workspace-Guided Rapidly-Exploring Random Tree Method for a Robot Arm
 WorkspaceGuided RapidlyExploring Random Tree Method for a Robot Arm Jaesik Choi choi31@cs.uiuc.edu August 12, 2007 Abstract Motion planning for robotic arms is important for real, physical world applications.
WorkspaceGuided RapidlyExploring Random Tree Method for a Robot Arm Jaesik Choi choi31@cs.uiuc.edu August 12, 2007 Abstract Motion planning for robotic arms is important for real, physical world applications.
Search Spaces I. Before we get started... ME/CS 132b Advanced Robotics: Navigation and Perception 4/05/2011
 Search Spaces I b Advanced Robotics: Navigation and Perception 4/05/2011 1 Before we get started... Website updated with Spring quarter grading policy 30% homework, 20% lab, 50% course project Website
Search Spaces I b Advanced Robotics: Navigation and Perception 4/05/2011 1 Before we get started... Website updated with Spring quarter grading policy 30% homework, 20% lab, 50% course project Website
Introduction to Information Science and Technology (IST) Part IV: Intelligent Machines and Robotics Planning
 Part IV: Intelligent Machines and Robotics Planning") Introduction to Information Science and Technology (IST) Part IV: Intelligent Machines and Robotics Planning Sören Schwertfeger / 师泽仁 ShanghaiTech University ShanghaiTech University - SIST - 10.05.2017
Introduction to Information Science and Technology (IST) Part IV: Intelligent Machines and Robotics Planning Sören Schwertfeger / 师泽仁 ShanghaiTech University ShanghaiTech University - SIST - 10.05.2017
Roadmaps. Vertex Visibility Graph. Reduced visibility graph, i.e., not including segments that extend into obstacles on either side.
 Roadmaps Vertex Visibility Graph Full visibility graph Reduced visibility graph, i.e., not including segments that extend into obstacles on either side. (but keeping endpoints roads) what else might we
Roadmaps Vertex Visibility Graph Full visibility graph Reduced visibility graph, i.e., not including segments that extend into obstacles on either side. (but keeping endpoints roads) what else might we
Visual Navigation for Flying Robots. Motion Planning
 Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Motion Planning Dr. Jürgen Sturm Motivation: Flying Through Forests 3 1 2 Visual Navigation for Flying Robots 2 Motion Planning
Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Motion Planning Dr. Jürgen Sturm Motivation: Flying Through Forests 3 1 2 Visual Navigation for Flying Robots 2 Motion Planning
SPATIAL GUIDANCE TO RRT PLANNER USING CELL-DECOMPOSITION ALGORITHM
 SPATIAL GUIDANCE TO RRT PLANNER USING CELL-DECOMPOSITION ALGORITHM Ahmad Abbadi, Radomil Matousek, Pavel Osmera, Lukas Knispel Brno University of Technology Institute of Automation and Computer Science
SPATIAL GUIDANCE TO RRT PLANNER USING CELL-DECOMPOSITION ALGORITHM Ahmad Abbadi, Radomil Matousek, Pavel Osmera, Lukas Knispel Brno University of Technology Institute of Automation and Computer Science
Cognitive Robotics Robot Motion Planning Matteo Matteucci
 Cognitive Robotics Robot Motion Planning Robot Motion Planning eminently necessary since, by definition, a robot accomplishes tasks by moving in the real world. J.-C. Latombe (1991) Robot Motion Planning
Cognitive Robotics Robot Motion Planning Robot Motion Planning eminently necessary since, by definition, a robot accomplishes tasks by moving in the real world. J.-C. Latombe (1991) Robot Motion Planning
Metric Planning: Overview
 Also called quantitative planning Tries to find optimal path to goal Metric Planning: Overview As opposed to some path as per qualitative approach Usually plans path as series of subgoals (waypoints) Optimal/best
Also called quantitative planning Tries to find optimal path to goal Metric Planning: Overview As opposed to some path as per qualitative approach Usually plans path as series of subgoals (waypoints) Optimal/best
Introduction to Mobile Robotics Path and Motion Planning. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello
 Introduction to Mobile Robotics Path and Motion Planning Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 Motion Planning Latombe (1991): eminently necessary since,
Introduction to Mobile Robotics Path and Motion Planning Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 Motion Planning Latombe (1991): eminently necessary since,
Local Search Methods. CS 188: Artificial Intelligence Fall Announcements. Hill Climbing. Hill Climbing Diagram. Today
 CS 188: Artificial Intelligence Fall 2006 Lecture 5: Robot Motion Planning 9/14/2006 Local Search Methods Queue-based algorithms keep fallback options (backtracking) Local search: improve what you have
CS 188: Artificial Intelligence Fall 2006 Lecture 5: Robot Motion Planning 9/14/2006 Local Search Methods Queue-based algorithms keep fallback options (backtracking) Local search: improve what you have
Motion Planning. Howie CHoset
 Motion Planning Howie CHoset What is Motion Planning? What is Motion Planning? Determining where to go Overview The Basics Motion Planning Statement The World and Robot Configuration Space Metrics Algorithms
Motion Planning Howie CHoset What is Motion Planning? What is Motion Planning? Determining where to go Overview The Basics Motion Planning Statement The World and Robot Configuration Space Metrics Algorithms
6.141: Robotics systems and science Lecture 10: Motion Planning III
 6.141: Robotics systems and science Lecture 10: Motion Planning III Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2012 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
6.141: Robotics systems and science Lecture 10: Motion Planning III Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2012 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
Collision and Proximity Queries
 Collision and Proximity Queries Dinesh Manocha (based on slides from Ming Lin) COMP790-058 Fall 2013 Geometric Proximity Queries l Given two object, how would you check: If they intersect with each other
Collision and Proximity Queries Dinesh Manocha (based on slides from Ming Lin) COMP790-058 Fall 2013 Geometric Proximity Queries l Given two object, how would you check: If they intersect with each other
Autonomous Mobile Robots, Chapter 6 Planning and Navigation Where am I going? How do I get there? Localization. Cognition. Real World Environment
 Planning and Navigation Where am I going? How do I get there?? Localization "Position" Global Map Cognition Environment Model Local Map Perception Real World Environment Path Motion Control Competencies
Planning and Navigation Where am I going? How do I get there?? Localization "Position" Global Map Cognition Environment Model Local Map Perception Real World Environment Path Motion Control Competencies
Lecture 11 Combinatorial Planning: In the Plane
 CS 460/560 Introduction to Computational Robotics Fall 2017, Rutgers University Lecture 11 Combinatorial Planning: In the Plane Instructor: Jingjin Yu Outline Convex shapes, revisited Combinatorial planning
CS 460/560 Introduction to Computational Robotics Fall 2017, Rutgers University Lecture 11 Combinatorial Planning: In the Plane Instructor: Jingjin Yu Outline Convex shapes, revisited Combinatorial planning
Humanoid Robotics. Inverse Kinematics and Whole-Body Motion Planning. Maren Bennewitz
 Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Planning for object manipulation Whole-body motion to reach a desired goal configuration Generate a sequence
Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Planning for object manipulation Whole-body motion to reach a desired goal configuration Generate a sequence
Hot topics and Open problems in Computational Geometry. My (limited) perspective. Class lecture for CSE 546,
 perspective. Class lecture for CSE 546,") Hot topics and Open problems in Computational Geometry. My (limited) perspective Class lecture for CSE 546, 2-13-07 Some slides from this talk are from Jack Snoeyink and L. Kavrakis Key trends on Computational
Hot topics and Open problems in Computational Geometry. My (limited) perspective Class lecture for CSE 546, 2-13-07 Some slides from this talk are from Jack Snoeyink and L. Kavrakis Key trends on Computational
Robot Motion Planning and (a little) Computational Geometry
 Computational Geometry") Images taken from slides b B. Baazit, G. Dudek, J. C. Latombe and A. Moore Robot Motion Planning and (a little) Computational Geometr Topics: Transforms Topological Methods Configuration space Skeletonization
Images taken from slides b B. Baazit, G. Dudek, J. C. Latombe and A. Moore Robot Motion Planning and (a little) Computational Geometr Topics: Transforms Topological Methods Configuration space Skeletonization
Geometric Path Planning for General Robot Manipulators
 Proceedings of the World Congress on Engineering and Computer Science 29 Vol II WCECS 29, October 2-22, 29, San Francisco, USA Geometric Path Planning for General Robot Manipulators Ziyad Aljarboua Abstract
Proceedings of the World Congress on Engineering and Computer Science 29 Vol II WCECS 29, October 2-22, 29, San Francisco, USA Geometric Path Planning for General Robot Manipulators Ziyad Aljarboua Abstract
Mobile Robot Path Planning in Static Environments using Particle Swarm Optimization
 Mobile Robot Path Planning in Static Environments using Particle Swarm Optimization M. Shahab Alam, M. Usman Rafique, and M. Umer Khan Abstract Motion planning is a key element of robotics since it empowers
Mobile Robot Path Planning in Static Environments using Particle Swarm Optimization M. Shahab Alam, M. Usman Rafique, and M. Umer Khan Abstract Motion planning is a key element of robotics since it empowers
CHAPTER SIX. the RRM creates small covering roadmaps for all tested environments.
 CHAPTER SIX CREATING SMALL ROADMAPS Many algorithms have been proposed that create a roadmap from which a path for a moving object can be extracted. These algorithms generally do not give guarantees on
CHAPTER SIX CREATING SMALL ROADMAPS Many algorithms have been proposed that create a roadmap from which a path for a moving object can be extracted. These algorithms generally do not give guarantees on
Collided Path Replanning in Dynamic Environments Using RRT and Cell Decomposition Algorithms
 Collided Path Replanning in Dynamic Environments Using RRT and Cell Decomposition Algorithms Ahmad Abbadi ( ) and Vaclav Prenosil Department of Information Technologies, Faculty of Informatics, Masaryk
Collided Path Replanning in Dynamic Environments Using RRT and Cell Decomposition Algorithms Ahmad Abbadi ( ) and Vaclav Prenosil Department of Information Technologies, Faculty of Informatics, Masaryk
PATH PLANNING IMPLEMENTATION USING MATLAB
 PATH PLANNING IMPLEMENTATION USING MATLAB A. Abbadi, R. Matousek Brno University of Technology, Institute of Automation and Computer Science Technicka 2896/2, 66 69 Brno, Czech Republic Ahmad.Abbadi@mail.com,
PATH PLANNING IMPLEMENTATION USING MATLAB A. Abbadi, R. Matousek Brno University of Technology, Institute of Automation and Computer Science Technicka 2896/2, 66 69 Brno, Czech Republic Ahmad.Abbadi@mail.com,
A Voronoi-Based Hybrid Motion Planner
 A Voronoi-Based Hybrid Motion Planner Mark Foskey Maxim Garber Ming C. Lin Dinesh Manocha Department of Computer Science University of North Carolina at Chapel Hill http://www.cs.unc.edu/ geom/voronoi/vplan
A Voronoi-Based Hybrid Motion Planner Mark Foskey Maxim Garber Ming C. Lin Dinesh Manocha Department of Computer Science University of North Carolina at Chapel Hill http://www.cs.unc.edu/ geom/voronoi/vplan
Final Report: Dynamic Dubins-curve based RRT Motion Planning for Differential Constrain Robot
 Final Report: Dynamic Dubins-curve based RRT Motion Planning for Differential Constrain Robot Abstract This project develops a sample-based motion-planning algorithm for robot with differential constraints.
Final Report: Dynamic Dubins-curve based RRT Motion Planning for Differential Constrain Robot Abstract This project develops a sample-based motion-planning algorithm for robot with differential constraints.
Roadmap-Based Path Planning
 Roadmap-Based d Path Planning Chapter 7 Objectives Understand the definition of a Road Map Investigate techniques for roadmap-based goal- directed path planning in 2D environments geometry-based algorithms
Roadmap-Based d Path Planning Chapter 7 Objectives Understand the definition of a Road Map Investigate techniques for roadmap-based goal- directed path planning in 2D environments geometry-based algorithms
Non-holonomic Planning
 Non-holonomic Planning Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We have learned about RRTs. q new q init q near q rand But the standard
Non-holonomic Planning Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We have learned about RRTs. q new q init q near q rand But the standard
Computational Geometry. Algorithm Design (10) Computational Geometry. Convex Hull. Areas in Computational Geometry
 Computational Geometry. Convex Hull. Areas in Computational Geometry") Computational Geometry Algorithm Design (10) Computational Geometry Graduate School of Engineering Takashi Chikayama Algorithms formulated as geometry problems Broad application areas Computer Graphics,
Computational Geometry Algorithm Design (10) Computational Geometry Graduate School of Engineering Takashi Chikayama Algorithms formulated as geometry problems Broad application areas Computer Graphics,
Introduction to Mobile Robotics Path Planning and Collision Avoidance. Wolfram Burgard, Maren Bennewitz, Diego Tipaldi, Luciano Spinello
 Introduction to Mobile Robotics Path Planning and Collision Avoidance Wolfram Burgard, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 Motion Planning Latombe (1991): is eminently necessary since, by
Introduction to Mobile Robotics Path Planning and Collision Avoidance Wolfram Burgard, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 Motion Planning Latombe (1991): is eminently necessary since, by
Motion Planning. Chapter Motion Planning Concepts. by Lydia E. Kavraki and Steven M. LaValle Configuration Space
 Chapter 5 Motion Planning by Lydia E. Kavraki and Steven M. LaValle A fundamental robotics task is to plan collision-free motions for complex bodies from a start to a goal position among a collection of
Chapter 5 Motion Planning by Lydia E. Kavraki and Steven M. LaValle A fundamental robotics task is to plan collision-free motions for complex bodies from a start to a goal position among a collection of
Announcements. CS 188: Artificial Intelligence Fall Robot motion planning! Today. Robotics Tasks. Mobile Robots
 CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Announcements Project 1 due (yesterday)! Project 2 (Pacman with ghosts) up in a few days Reminder: you are allowed to
CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Announcements Project 1 due (yesterday)! Project 2 (Pacman with ghosts) up in a few days Reminder: you are allowed to