Mobile Point Fusion. Real-time 3d surface reconstruction out of depth images on a mobile platform
|
|
|
- Winifred Clark
- 6 years ago
- Views:
Transcription



1 Mobile Point Fusion Real-time 3d surface reconstruction out of depth images on a mobile platform Aaron Wetzler Presenting: Daniel Ben-Hoda Supervisors: Prof. Ron Kimmel Gal Kamar Yaron Honen Supported by grant

2 Motivation Dense 3D Reconstruction is a fundamental problem in the field of computer vision. Currently there are limited solutions for real time dense 3D reconstruction on mobile devices. Dense 3D Reconstruction on mobile devices can be used to create 3D scanners and Augmented Reality apps for SmB s and personal uses. Depth Cameras are becoming cheaper, and more readily available, and are becoming available in mobile devices. Mobile devices graphical and computational power is increasing. Mobile Point Fusion = Dense 3D reconstruction from depth camera in real time on mobile Devices

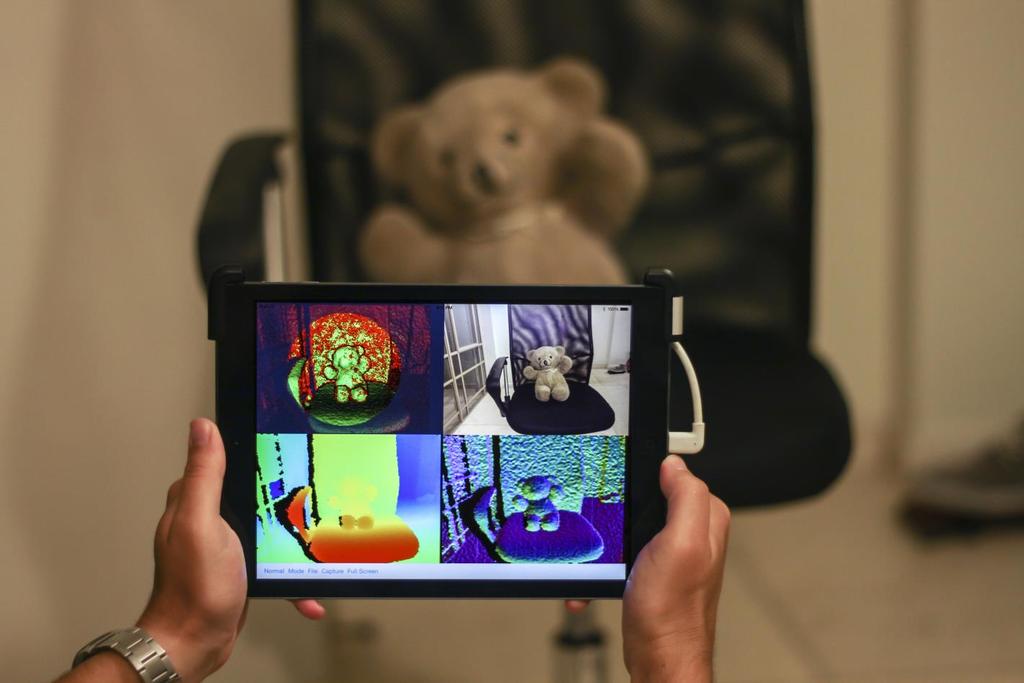
3 System Setup Structure depth sensor attached to an ipad Retina

4 The UI Rendered model RGB Depth Normals

5 Pipeline and System Overview The pipeline continuously receives depth images from the sensor Using the global model and the new data the camera pose is estimated The global model is updated with the new data The updated global model is rendered to the screen from the new point of view
6 Model Representation Our system adopts a purely point-based representation. This representation eliminates the need for spatial and structural data structures Our global model is a simple point cloud Points are assumed to be oriented circular disks Each point is allocated a unique ID upon first encounter The ID corresponds to the index of the OpenGL primitive GL_POINT representing the point The system recognizes previously encountered points using these ID s Each time a point is encountered, the system s confidence in that point is increased The system distinguishes between stable and unstable model points according to that points confidence

7 Model Attributes The model data structure is maintained on the GPU. Each point is represented by the following attributes: ID: i N + Position: v i R 3 Normal: n i R 3 Normal Radius: r i R Confidence: c i R - a confidence counter Points with c i c stable are considered stable Timestamp: t i N - the last iteration in which this point was modified
8 Depth Image Preprocessing Depth images are filtered to remove sensor noise For each depth measurement the following is computed: 3D position Normal Radius Input depth images Filtering 3D Position Extraction Normal Estimation Radius Estimation Camera pose estimation

9 Bilateral Filtering Depth images are filtered using a Gaussian Bilateral Filter to remove sensor noise For each pixel distance possible in the filter box, Gaussian values are pre-calculated Gaussian values are also pre-calculated for the range differences of 0-256

10 Bilateral Filtering Raw depth image Filtered Depth image
11 Computing Camera-Space Position Given the supplied OpenGL projection matrix, P, that simulates the projection of the camera onto the image plane, the reverse OpenGL projection processes is performed

12 Normal Estimation Surface normals are estimated using neighboring pixels by calculating central differences d x = p 8 c p 2 c d y = p 6 c p 4 c n p5 c = d x d y
13 Radii Estimation Comparing solid angled provides an upper limit to the radius of the object which was projected Radii are reduced over time as more detailed measurement are acquired therefore the radii are set to their respective upper limits δa = cos (α) cos (θ) z f 2 δi



14 Depth Image Preprocessing Attributes of new points are saved into textures for use at later stages Depth image Positions Normals + radius
 which finds the 6 DOF transformation between two point clouds by finding correspondences and computing the transformation which minimizes a chosen error metric")
15 Camera Pose Estimation The current 6 DOF camera pose is estimated by aligning the new depth image and the global model as viewed from the last known position of the camera The alignment is preformed using Iterative Closest Point (ICP) which finds the 6 DOF transformation between two point clouds by finding correspondences and computing the transformation which minimizes a chosen error metric Collect visible stable model points Find correspondences Solve linear least squares Apply the transformation to the model
16 ICP Preprocessing Stable model points are rendered from the last known point of view, the ID s of these points are saved in a texture Using this texture, the ID s of the visible stable model points are collected for further rendering
17 Finding Correspondences Correspondences are found using projective association Visible stable model points previously collected are projected onto the new depth image If a model point is projected onto a pixel containing a depth measurement a correspondence is found Correspondences are rejected if The angle between normals is greater than δ normal The Euclidean distance is greater than δ distance
18 Finding the Transformation The desired 6 DOF transformation is one that minimizes a chosen error metric In order to accelerate convergence the point to plane error metric is chosen Computing the desired transformation requires solving a non-linear least squares problem The non-linear least squares problem is approximated by a linear one to reduce computation time
19 Applying the Transformation The computed transformation is applied to the model and the process is repeated until a sufficient accuracy is reached Empirical data shows that the convergence of the point to plane ICP variant is not monotonous, therefore correspondences are found every several iterations
20 Updating the Global Model New data is fused into the global model, once the global model and the new depth image are aligned The model is updated using the following steps The model is rendered in high resolution Point fusion Point Removal
21 Super-sampled Rendering The model s visible points ID s and attributes are rendered to textures to be used in the following steps Each point is rendered into a single texel to reveal the actual surface sample distribution The model is rendered at 16 times the depth sensor s native resolution Each of the camera s pixels corresponds to a 4X4 neighborhood in the super-sampled textures

22 Point Fusion For each new point a single model point is matched The matching point is chosen from the corresponding 4X4 neighborhood: Discard points larger than ±δ depth distance from the viewing ray, adjusted according to sensor uncertainty Discard points whose normals have an angle larger than δ normal From the remaining points select the points with the highest confidence From the remaining points select the point closest to the viewing ray

23 Point Fusion The matching points attributes are averaged according to their respective confidence values If no match is found, the point is treated as a new point and added to the model The CPU reads the averaged values and updates the global model Fusion: Green points are stable
24 Point Removal In addition to the merging and adding of new points, under certain conditions model points need to be removed Points that remain unstable for a long period of time are likely outliers or artifacts from moving objects and therefore need to be removed from the model Stable model points that were merged with new data have their position adjusted, therefore: Model points that lie in front of these points from the current point of view are removed as these are free space violations Neighboring points that have very similar position, normal and overlapping spheres are redundant and are removed to further simplify the model
25 Point Removal To identify the points for removal, the super-sampled textures are used For each stable model point that was merged with new data the corresponding 4x4 neighborhood is searched for removal candidates The ID s of points that need to be removed are rendered to texture The model is rendered using index rendering throughout the pipeline. Therefore each time the model is rendered a list of indices, the vertex ID s, is passed to the GPU Removing a point from the model can be executed by simply removing the point s ID from the list of model indices


26 Point Removal To prevent fragmentation in the model memory, the following method is employed: Each time a point is removed it s index is inserted to a FIFO queue When a new point needs to be added to the model, it is written to the memory corresponding to the index at the head of the queue If the queue is empty the point is inserted after the last model point in the memory
27 Comparison to Kinect Fusion Opposed to Kinect Fusion which employed a volumetric data structure, Mobile Point Fusion uses a purely point based representation throughout the pipeline Enabling scanning of large scenes Resolution is limited by the depth sensor only Computation time is less dependent on model size and resolution Eliminates the overhead of converting between representations Does not create a watertight 3D model (but this can be later generated offline)
28 Results
29 Accomplishments and Unresolved Issues Mobile Point Fusion has demonstrated how point based fusion can be efficiently preformed on mobile devices. The main issue is the ICP correspondences. In order to adapt the system to the mobile platform the model representation had to be modified. This simpler representation which uses the GL_POINT primitive has the drawback that for each point the depth of all fragments is equal. This inaccuracy might be the cause of the ICP correspondence failure. OpenGL ES 3.0 limits the use of floating point textures to 16 bit components. This accuracy limit has caused various numerical issues.

30 Future Work Performance optimizations: Utilize the GPU to perform bilateral filtering Avoid expensive CPU texture reads in the point removal stages Utilize mip mapping to accelerate the pipeline in various stages. Implement the Dynamic Estimation stage Integrate RGB data into the pipeline Offload old model data to HDD for later use
![Bibliography [1] Maik Keller, Damien Lefloch, Martin Lambers, Shahram Izadi, Tim Weyrich, Andreas Kolb. Real-time 3D Reconstruction in Dynamic Scenes using Point-based Fusion.](/docs-images/76/73781086/images/31-4.jpg "In 2013 International Conference on 3D Vision [2] C. Tomasi, R. Manduchi. Bilateral filtering for gray and color images.")
31 Bibliography [1] Maik Keller, Damien Lefloch, Martin Lambers, Shahram Izadi, Tim Weyrich, Andreas Kolb. Real-time 3D Reconstruction in Dynamic Scenes using Point-based Fusion. In 2013 International Conference on 3D Vision [2] C. Tomasi, R. Manduchi. Bilateral filtering for gray and color images. In Proceedings of the 1998 IEEE International Conference on Computer Vision, pages [3] Kok-Lim Low. Linear Least-Squares Optimization for Point-to-Plane ICP Surface Registration. In Technical Report TR04-004, Department of Computer Science, University of North Carolina at Chapel Hill, February 2004 [4] Szymon Rusinkiewicz, Marc Levoy. Efficient Variants of the ICP Algorithm, 2001 [5] Shahram Izadi, David Kim, Otmar Hilliges, David Molyneaux, Richard A. Newcombe, Pushmeet Kohli, Jamie Shotton, Steve Hodges, Dustin Freeman, Andrew J. Davison, Andrew Fitzgibbon. KinectFusion: Real-time 3D Reconstruction and Interaction Using a Moving Depth Camera, 2006 [6] G. Guennebaud, M. Paulin. Efficient Screen Space Approach for Hardware Accelerated Surfel Rendering, November 2003 [7] Thibaut Weise, Thomas Wismer, Bastian Leibe, Luc Van Gool. In-Hand Scanning with Online Loop Closure, 2009 [8] M. Lindenbaum, Computer Vision Technion course, 2014 [9] Compute eye space from window space [10] OpenGL projection Matrix
32 Thank You
Object Reconstruction
 B. Scholz Object Reconstruction 1 / 39 MIN-Fakultät Fachbereich Informatik Object Reconstruction Benjamin Scholz Universität Hamburg Fakultät für Mathematik, Informatik und Naturwissenschaften Fachbereich
B. Scholz Object Reconstruction 1 / 39 MIN-Fakultät Fachbereich Informatik Object Reconstruction Benjamin Scholz Universität Hamburg Fakultät für Mathematik, Informatik und Naturwissenschaften Fachbereich
Mesh from Depth Images Using GR 2 T
 Mesh from Depth Images Using GR 2 T Mairead Grogan & Rozenn Dahyot School of Computer Science and Statistics Trinity College Dublin Dublin, Ireland mgrogan@tcd.ie, Rozenn.Dahyot@tcd.ie www.scss.tcd.ie/
Mesh from Depth Images Using GR 2 T Mairead Grogan & Rozenn Dahyot School of Computer Science and Statistics Trinity College Dublin Dublin, Ireland mgrogan@tcd.ie, Rozenn.Dahyot@tcd.ie www.scss.tcd.ie/
Outline. 1 Why we re interested in Real-Time tracking and mapping. 3 Kinect Fusion System Overview. 4 Real-time Surface Mapping
 Outline CSE 576 KinectFusion: Real-Time Dense Surface Mapping and Tracking PhD. work from Imperial College, London Microsoft Research, Cambridge May 6, 2013 1 Why we re interested in Real-Time tracking
Outline CSE 576 KinectFusion: Real-Time Dense Surface Mapping and Tracking PhD. work from Imperial College, London Microsoft Research, Cambridge May 6, 2013 1 Why we re interested in Real-Time tracking
Memory Management Method for 3D Scanner Using GPGPU
 GPGPU 3D 1 2 KinectFusion GPGPU 3D., GPU., GPGPU Octree. GPU,,. Memory Management Method for 3D Scanner Using GPGPU TATSUYA MATSUMOTO 1 SATORU FUJITA 2 This paper proposes an efficient memory management
GPGPU 3D 1 2 KinectFusion GPGPU 3D., GPU., GPGPU Octree. GPU,,. Memory Management Method for 3D Scanner Using GPGPU TATSUYA MATSUMOTO 1 SATORU FUJITA 2 This paper proposes an efficient memory management
3D Computer Vision. Depth Cameras. Prof. Didier Stricker. Oliver Wasenmüller
 3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
ABSTRACT. KinectFusion is a surface reconstruction method to allow a user to rapidly
 ABSTRACT Title of Thesis: A REAL TIME IMPLEMENTATION OF 3D SYMMETRIC OBJECT RECONSTRUCTION Liangchen Xi, Master of Science, 2017 Thesis Directed By: Professor Yiannis Aloimonos Department of Computer Science
ABSTRACT Title of Thesis: A REAL TIME IMPLEMENTATION OF 3D SYMMETRIC OBJECT RECONSTRUCTION Liangchen Xi, Master of Science, 2017 Thesis Directed By: Professor Yiannis Aloimonos Department of Computer Science
Static Scene Reconstruction
 GPU supported Real-Time Scene Reconstruction with a Single Camera Jan-Michael Frahm, 3D Computer Vision group, University of North Carolina at Chapel Hill Static Scene Reconstruction 1 Capture on campus
GPU supported Real-Time Scene Reconstruction with a Single Camera Jan-Michael Frahm, 3D Computer Vision group, University of North Carolina at Chapel Hill Static Scene Reconstruction 1 Capture on campus
Point Sample Rendering
 Point Sample Rendering Efficient Screen Space Approach for HW Accelerated Surfel Rendering VMV03, november 2003 Gaël GUENNEBAUD - Mathias PAULIN IRIT-CNRS-UPS TOULOUSE-FRANCE http://www.irit.fr/recherches/sirv/vis/surfel/index.html
Point Sample Rendering Efficient Screen Space Approach for HW Accelerated Surfel Rendering VMV03, november 2003 Gaël GUENNEBAUD - Mathias PAULIN IRIT-CNRS-UPS TOULOUSE-FRANCE http://www.irit.fr/recherches/sirv/vis/surfel/index.html
A New Approach For 3D Image Reconstruction From Multiple Images
 International Journal of Electronics Engineering Research. ISSN 0975-6450 Volume 9, Number 4 (2017) pp. 569-574 Research India Publications http://www.ripublication.com A New Approach For 3D Image Reconstruction
International Journal of Electronics Engineering Research. ISSN 0975-6450 Volume 9, Number 4 (2017) pp. 569-574 Research India Publications http://www.ripublication.com A New Approach For 3D Image Reconstruction
Handheld scanning with ToF sensors and cameras
 Handheld scanning with ToF sensors and cameras Enrico Cappelletto, Pietro Zanuttigh, Guido Maria Cortelazzo Dept. of Information Engineering, University of Padova enrico.cappelletto,zanuttigh,corte@dei.unipd.it
Handheld scanning with ToF sensors and cameras Enrico Cappelletto, Pietro Zanuttigh, Guido Maria Cortelazzo Dept. of Information Engineering, University of Padova enrico.cappelletto,zanuttigh,corte@dei.unipd.it
Surface Registration. Gianpaolo Palma
 Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
Generating 3D Colored Face Model Using a Kinect Camera
 Generating 3D Colored Face Model Using a Kinect Camera Submitted by: Ori Ziskind, Rotem Mordoch, Nadine Toledano Advisors: Matan Sela, Yaron Honen Geometric Image Processing Laboratory, CS, Technion March,
Generating 3D Colored Face Model Using a Kinect Camera Submitted by: Ori Ziskind, Rotem Mordoch, Nadine Toledano Advisors: Matan Sela, Yaron Honen Geometric Image Processing Laboratory, CS, Technion March,
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Dynamic 2D/3D Registration for the Kinect
 Dynamic 2D/3D Registration for the Kinect Sofien Bouaziz Mark Pauly École Polytechnique Fédérale de Lausanne Abstract Image and geometry registration algorithms are an essential component of many computer
Dynamic 2D/3D Registration for the Kinect Sofien Bouaziz Mark Pauly École Polytechnique Fédérale de Lausanne Abstract Image and geometry registration algorithms are an essential component of many computer
Multiple View Depth Generation Based on 3D Scene Reconstruction Using Heterogeneous Cameras
 https://doi.org/0.5/issn.70-7.07.7.coimg- 07, Society for Imaging Science and Technology Multiple View Generation Based on D Scene Reconstruction Using Heterogeneous Cameras Dong-Won Shin and Yo-Sung Ho
https://doi.org/0.5/issn.70-7.07.7.coimg- 07, Society for Imaging Science and Technology Multiple View Generation Based on D Scene Reconstruction Using Heterogeneous Cameras Dong-Won Shin and Yo-Sung Ho
Rigid ICP registration with Kinect
 Rigid ICP registration with Kinect Students: Yoni Choukroun, Elie Semmel Advisor: Yonathan Aflalo 1 Overview.p.3 Development of the project..p.3 Papers p.4 Project algorithm..p.6 Result of the whole body.p.7
Rigid ICP registration with Kinect Students: Yoni Choukroun, Elie Semmel Advisor: Yonathan Aflalo 1 Overview.p.3 Development of the project..p.3 Papers p.4 Project algorithm..p.6 Result of the whole body.p.7
High-speed Three-dimensional Mapping by Direct Estimation of a Small Motion Using Range Images
 MECATRONICS - REM 2016 June 15-17, 2016 High-speed Three-dimensional Mapping by Direct Estimation of a Small Motion Using Range Images Shinta Nozaki and Masashi Kimura School of Science and Engineering
MECATRONICS - REM 2016 June 15-17, 2016 High-speed Three-dimensional Mapping by Direct Estimation of a Small Motion Using Range Images Shinta Nozaki and Masashi Kimura School of Science and Engineering
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Virtualized Reality Using Depth Camera Point Clouds
 Virtualized Reality Using Depth Camera Point Clouds Jordan Cazamias Stanford University jaycaz@stanford.edu Abhilash Sunder Raj Stanford University abhisr@stanford.edu Abstract We explored various ways
Virtualized Reality Using Depth Camera Point Clouds Jordan Cazamias Stanford University jaycaz@stanford.edu Abhilash Sunder Raj Stanford University abhisr@stanford.edu Abstract We explored various ways
A Pipeline for Building 3D Models using Depth Cameras
 A Pipeline for Building 3D Models using Depth Cameras Avishek Chatterjee Suraj Jain Venu Madhav Govindu Department of Electrical Engineering Indian Institute of Science Bengaluru 560012 INDIA {avishek
A Pipeline for Building 3D Models using Depth Cameras Avishek Chatterjee Suraj Jain Venu Madhav Govindu Department of Electrical Engineering Indian Institute of Science Bengaluru 560012 INDIA {avishek
Freehand Voxel Carving Scanning on a Mobile Device
 Technion Institute of Technology Project in Image Processing and Analysis 234329 Freehand Voxel Carving Scanning on a Mobile Device Author: Student Number: 305950099 Supervisors: Aaron Wetzler, Yaron Honen,
Technion Institute of Technology Project in Image Processing and Analysis 234329 Freehand Voxel Carving Scanning on a Mobile Device Author: Student Number: 305950099 Supervisors: Aaron Wetzler, Yaron Honen,
Probabilistic Surfel Fusion for Dense LiDAR Mapping Chanoh Park, Soohwan Kim, Peyman Moghadam, Clinton Fookes, Sridha Sridharan
 Probabilistic Surfel Fusion for Dense LiDAR Mapping Chanoh Park, Soohwan Kim, Peyman Moghadam, Clinton Fookes, Sridha Sridharan ICCV workshop 2017 www.data61.csiro.au Introduction Narrow FoV Short sensing
Probabilistic Surfel Fusion for Dense LiDAR Mapping Chanoh Park, Soohwan Kim, Peyman Moghadam, Clinton Fookes, Sridha Sridharan ICCV workshop 2017 www.data61.csiro.au Introduction Narrow FoV Short sensing
3D Models from Range Sensors. Gianpaolo Palma
 3D Models from Range Sensors Gianpaolo Palma Who Gianpaolo Palma Researcher at Visual Computing Laboratory (ISTI-CNR) Expertise: 3D scanning, Mesh Processing, Computer Graphics E-mail: gianpaolo.palma@isti.cnr.it
3D Models from Range Sensors Gianpaolo Palma Who Gianpaolo Palma Researcher at Visual Computing Laboratory (ISTI-CNR) Expertise: 3D scanning, Mesh Processing, Computer Graphics E-mail: gianpaolo.palma@isti.cnr.it
Visualization of Temperature Change using RGB-D Camera and Thermal Camera
 000 001 002 003 004 005 006 007 008 009 010 011 012 013 014 015 016 017 018 019 020 021 022 023 024 025 026 027 028 029 030 031 032 033 034 035 036 037 038 039 040 041 042 043 044 Visualization of Temperature
000 001 002 003 004 005 006 007 008 009 010 011 012 013 014 015 016 017 018 019 020 021 022 023 024 025 026 027 028 029 030 031 032 033 034 035 036 037 038 039 040 041 042 043 044 Visualization of Temperature
5.2 Surface Registration
 Spring 2018 CSCI 621: Digital Geometry Processing 5.2 Surface Registration Hao Li http://cs621.hao-li.com 1 Acknowledgement Images and Slides are courtesy of Prof. Szymon Rusinkiewicz, Princeton University
Spring 2018 CSCI 621: Digital Geometry Processing 5.2 Surface Registration Hao Li http://cs621.hao-li.com 1 Acknowledgement Images and Slides are courtesy of Prof. Szymon Rusinkiewicz, Princeton University
Geometric Reconstruction Dense reconstruction of scene geometry
 Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Monocular Tracking and Reconstruction in Non-Rigid Environments
 Monocular Tracking and Reconstruction in Non-Rigid Environments Kick-Off Presentation, M.Sc. Thesis Supervisors: Federico Tombari, Ph.D; Benjamin Busam, M.Sc. Patrick Ruhkamp 13.01.2017 Introduction Motivation:
Monocular Tracking and Reconstruction in Non-Rigid Environments Kick-Off Presentation, M.Sc. Thesis Supervisors: Federico Tombari, Ph.D; Benjamin Busam, M.Sc. Patrick Ruhkamp 13.01.2017 Introduction Motivation:
Kinect 3D Reconstruction
 Kinect 3D Reconstruction Mahsa Mohammadkhani Computing Science University of Alberta Edmonton, Canada Mahsa2@ualberta.ca Abstract This report presents a Kinect-based framework that can reconstruct a scene
Kinect 3D Reconstruction Mahsa Mohammadkhani Computing Science University of Alberta Edmonton, Canada Mahsa2@ualberta.ca Abstract This report presents a Kinect-based framework that can reconstruct a scene
3D PLANE-BASED MAPS SIMPLIFICATION FOR RGB-D SLAM SYSTEMS
 3D PLANE-BASED MAPS SIMPLIFICATION FOR RGB-D SLAM SYSTEMS 1,2 Hakim ELCHAOUI ELGHOR, 1 David ROUSSEL, 1 Fakhreddine ABABSA and 2 El-Houssine BOUYAKHF 1 IBISC Lab, Evry Val d'essonne University, Evry, France
3D PLANE-BASED MAPS SIMPLIFICATION FOR RGB-D SLAM SYSTEMS 1,2 Hakim ELCHAOUI ELGHOR, 1 David ROUSSEL, 1 Fakhreddine ABABSA and 2 El-Houssine BOUYAKHF 1 IBISC Lab, Evry Val d'essonne University, Evry, France
When Can We Use KinectFusion for Ground Truth Acquisition?
 When Can We Use KinectFusion for Ground Truth Acquisition? Stephan Meister 1, Shahram Izadi 2, Pushmeet Kohli 3, Martin Hämmerle 4, Carsten Rother 5 and Daniel Kondermann 6 Abstract KinectFusion is a method
When Can We Use KinectFusion for Ground Truth Acquisition? Stephan Meister 1, Shahram Izadi 2, Pushmeet Kohli 3, Martin Hämmerle 4, Carsten Rother 5 and Daniel Kondermann 6 Abstract KinectFusion is a method
Lecture 19: Depth Cameras. Visual Computing Systems CMU , Fall 2013
 Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Simpler Soft Shadow Mapping Lee Salzman September 20, 2007
 Simpler Soft Shadow Mapping Lee Salzman September 20, 2007 Lightmaps, as do other precomputed lighting methods, provide an efficient and pleasing solution for lighting and shadowing of relatively static
Simpler Soft Shadow Mapping Lee Salzman September 20, 2007 Lightmaps, as do other precomputed lighting methods, provide an efficient and pleasing solution for lighting and shadowing of relatively static
3D map reconstruction with sensor Kinect
 3D map reconstruction with sensor Kinect Searching for solution applicable to small mobile robots Peter Beňo, František Duchoň, Michal Tölgyessy, Peter Hubinský, Martin Kajan Institute of Robotics and
3D map reconstruction with sensor Kinect Searching for solution applicable to small mobile robots Peter Beňo, František Duchoň, Michal Tölgyessy, Peter Hubinský, Martin Kajan Institute of Robotics and
Project Updates Short lecture Volumetric Modeling +2 papers
 Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
A Flexible Scene Representation for 3D Reconstruction Using an RGB-D Camera
 2013 IEEE International Conference on Computer Vision A Flexible Scene Representation for 3D Reconstruction Using an RGB-D Camera Diego Thomas National Institute of Informatics Chiyoda, Tokyo, Japan diego
2013 IEEE International Conference on Computer Vision A Flexible Scene Representation for 3D Reconstruction Using an RGB-D Camera Diego Thomas National Institute of Informatics Chiyoda, Tokyo, Japan diego
Removing Moving Objects from Point Cloud Scenes
 Removing Moving Objects from Point Cloud Scenes Krystof Litomisky and Bir Bhanu University of California, Riverside krystof@litomisky.com, bhanu@ee.ucr.edu Abstract. Three-dimensional simultaneous localization
Removing Moving Objects from Point Cloud Scenes Krystof Litomisky and Bir Bhanu University of California, Riverside krystof@litomisky.com, bhanu@ee.ucr.edu Abstract. Three-dimensional simultaneous localization
FEATURE-BASED REGISTRATION OF RANGE IMAGES IN DOMESTIC ENVIRONMENTS
 FEATURE-BASED REGISTRATION OF RANGE IMAGES IN DOMESTIC ENVIRONMENTS Michael Wünstel, Thomas Röfer Technologie-Zentrum Informatik (TZI) Universität Bremen Postfach 330 440, D-28334 Bremen {wuenstel, roefer}@informatik.uni-bremen.de
FEATURE-BASED REGISTRATION OF RANGE IMAGES IN DOMESTIC ENVIRONMENTS Michael Wünstel, Thomas Röfer Technologie-Zentrum Informatik (TZI) Universität Bremen Postfach 330 440, D-28334 Bremen {wuenstel, roefer}@informatik.uni-bremen.de
Visualization of Temperature Change using RGB-D Camera and Thermal Camera
 Visualization of Temperature Change using RGB-D Camera and Thermal Camera Wataru Nakagawa, Kazuki Matsumoto, Francois de Sorbier, Maki Sugimoto, Hideo Saito, Shuji Senda, Takashi Shibata, and Akihiko Iketani
Visualization of Temperature Change using RGB-D Camera and Thermal Camera Wataru Nakagawa, Kazuki Matsumoto, Francois de Sorbier, Maki Sugimoto, Hideo Saito, Shuji Senda, Takashi Shibata, and Akihiko Iketani
Robust Online 3D Reconstruction Combining a Depth Sensor and Sparse Feature Points
 2016 23rd International Conference on Pattern Recognition (ICPR) Cancún Center, Cancún, México, December 4-8, 2016 Robust Online 3D Reconstruction Combining a Depth Sensor and Sparse Feature Points Erik
2016 23rd International Conference on Pattern Recognition (ICPR) Cancún Center, Cancún, México, December 4-8, 2016 Robust Online 3D Reconstruction Combining a Depth Sensor and Sparse Feature Points Erik
3D Photography: Active Ranging, Structured Light, ICP
 3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Photography: Stereo
 3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
Evaluation of Large Scale Scene Reconstruction
 Evaluation of Large Scale Scene Reconstruction Paul Merrell, Philippos Mordohai, Jan-Michael Frahm, and Marc Pollefeys Department of Computer Science University of North Carolina, Chapel Hill, USA Abstract
Evaluation of Large Scale Scene Reconstruction Paul Merrell, Philippos Mordohai, Jan-Michael Frahm, and Marc Pollefeys Department of Computer Science University of North Carolina, Chapel Hill, USA Abstract
KinectFusion: Real-Time Dense Surface Mapping and Tracking
 KinectFusion: Real-Time Dense Surface Mapping and Tracking Gabriele Bleser Thanks to Richard Newcombe for providing the ISMAR slides Overview General: scientific papers (structure, category) KinectFusion:
KinectFusion: Real-Time Dense Surface Mapping and Tracking Gabriele Bleser Thanks to Richard Newcombe for providing the ISMAR slides Overview General: scientific papers (structure, category) KinectFusion:
Semi-Automatic Initial Registration for the iray System: A User Study
 Semi-Automatic Initial Registration for the iray System: A User Study Tian Xie 1 (orcid.org/0000-0003-0204-1124), Mohammad M. Islam 1, Alan B. Lumsden 2, and Ioannis A. Kakadiaris 1 *(orcid.org/0000-0002-0591-1079)
Semi-Automatic Initial Registration for the iray System: A User Study Tian Xie 1 (orcid.org/0000-0003-0204-1124), Mohammad M. Islam 1, Alan B. Lumsden 2, and Ioannis A. Kakadiaris 1 *(orcid.org/0000-0002-0591-1079)
Deferred Splatting. Gaël GUENNEBAUD Loïc BARTHE Mathias PAULIN IRIT UPS CNRS TOULOUSE FRANCE.
 Deferred Splatting Gaël GUENNEBAUD Loïc BARTHE Mathias PAULIN IRIT UPS CNRS TOULOUSE FRANCE http://www.irit.fr/~gael.guennebaud Plan Complex Scenes: Triangles or Points? High Quality Splatting: Really
Deferred Splatting Gaël GUENNEBAUD Loïc BARTHE Mathias PAULIN IRIT UPS CNRS TOULOUSE FRANCE http://www.irit.fr/~gael.guennebaud Plan Complex Scenes: Triangles or Points? High Quality Splatting: Really
3D Colored Model Generation Based on Multiview Textures and Triangular Mesh
 3D Colored Model Generation Based on Multiview Textures and Triangular Mesh Lingni Ma, Luat Do, Egor Bondarev and Peter H. N. de With Department of Electrical Engineering, Eindhoven University of Technology
3D Colored Model Generation Based on Multiview Textures and Triangular Mesh Lingni Ma, Luat Do, Egor Bondarev and Peter H. N. de With Department of Electrical Engineering, Eindhoven University of Technology
Super-Resolution Keyframe Fusion for 3D Modeling with High-Quality Textures
 Super-Resolution Keyframe Fusion for 3D Modeling with High-Quality Textures Robert Maier, Jörg Stückler, Daniel Cremers International Conference on 3D Vision (3DV) October 2015, Lyon, France Motivation
Super-Resolution Keyframe Fusion for 3D Modeling with High-Quality Textures Robert Maier, Jörg Stückler, Daniel Cremers International Conference on 3D Vision (3DV) October 2015, Lyon, France Motivation
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Improved 3D Reconstruction using Combined Weighting Strategies
 Improved 3D Reconstruction using Combined Weighting Strategies Patrick Stotko Supervised by: Tim Golla Institute of Computer Science II - Computer Graphics University of Bonn Bonn / Germany Abstract Due
Improved 3D Reconstruction using Combined Weighting Strategies Patrick Stotko Supervised by: Tim Golla Institute of Computer Science II - Computer Graphics University of Bonn Bonn / Germany Abstract Due
Image-Based Rendering
 Image-Based Rendering COS 526, Fall 2016 Thomas Funkhouser Acknowledgments: Dan Aliaga, Marc Levoy, Szymon Rusinkiewicz What is Image-Based Rendering? Definition 1: the use of photographic imagery to overcome
Image-Based Rendering COS 526, Fall 2016 Thomas Funkhouser Acknowledgments: Dan Aliaga, Marc Levoy, Szymon Rusinkiewicz What is Image-Based Rendering? Definition 1: the use of photographic imagery to overcome
ICP and 3D-Reconstruction
 N. Slottke, H. Linne 1 Nikolas Slottke 1 Hendrik Linne 2 {7slottke, 7linne}@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme
N. Slottke, H. Linne 1 Nikolas Slottke 1 Hendrik Linne 2 {7slottke, 7linne}@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme
Exploiting Depth Camera for 3D Spatial Relationship Interpretation
 Exploiting Depth Camera for 3D Spatial Relationship Interpretation Jun Ye Kien A. Hua Data Systems Group, University of Central Florida Mar 1, 2013 Jun Ye and Kien A. Hua (UCF) 3D directional spatial relationships
Exploiting Depth Camera for 3D Spatial Relationship Interpretation Jun Ye Kien A. Hua Data Systems Group, University of Central Florida Mar 1, 2013 Jun Ye and Kien A. Hua (UCF) 3D directional spatial relationships
A Systems View of Large- Scale 3D Reconstruction
 Lecture 23: A Systems View of Large- Scale 3D Reconstruction Visual Computing Systems Goals and motivation Construct a detailed 3D model of the world from unstructured photographs (e.g., Flickr, Facebook)
Lecture 23: A Systems View of Large- Scale 3D Reconstruction Visual Computing Systems Goals and motivation Construct a detailed 3D model of the world from unstructured photographs (e.g., Flickr, Facebook)
A consumer level 3D object scanning device using Kinect for web-based C2C business
 A consumer level 3D object scanning device using Kinect for web-based C2C business Geoffrey Poon, Yu Yin Yeung and Wai-Man Pang Caritas Institute of Higher Education Introduction Internet shopping is popular
A consumer level 3D object scanning device using Kinect for web-based C2C business Geoffrey Poon, Yu Yin Yeung and Wai-Man Pang Caritas Institute of Higher Education Introduction Internet shopping is popular
Dual Back-to-Back Kinects for 3-D Reconstruction
 Ho Chuen Kam, Kin Hong Wong and Baiwu Zhang, Dual Back-to-Back Kinects for 3-D Reconstruction, ISVC'16 12th International Symposium on Visual Computing December 12-14, 2016, Las Vegas, Nevada, USA. Dual
Ho Chuen Kam, Kin Hong Wong and Baiwu Zhang, Dual Back-to-Back Kinects for 3-D Reconstruction, ISVC'16 12th International Symposium on Visual Computing December 12-14, 2016, Las Vegas, Nevada, USA. Dual
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Large Scale 3D Reconstruction by Structure from Motion
 Large Scale 3D Reconstruction by Structure from Motion Devin Guillory Ziang Xie CS 331B 7 October 2013 Overview Rome wasn t built in a day Overview of SfM Building Rome in a Day Building Rome on a Cloudless
Large Scale 3D Reconstruction by Structure from Motion Devin Guillory Ziang Xie CS 331B 7 October 2013 Overview Rome wasn t built in a day Overview of SfM Building Rome in a Day Building Rome on a Cloudless
Surface reconstruction Introduction. Florent Lafarge Inria Sophia Antipolis - Mediterranee
 Surface reconstruction Introduction Florent Lafarge Inria Sophia Antipolis - Mediterranee Outline Contents Introduction Smooth/piecewise-smooth reconstruction methods Primitive-based reconstruction methods
Surface reconstruction Introduction Florent Lafarge Inria Sophia Antipolis - Mediterranee Outline Contents Introduction Smooth/piecewise-smooth reconstruction methods Primitive-based reconstruction methods
NICP: Dense Normal Based Point Cloud Registration
 NICP: Dense Normal Based Point Cloud Registration Jacopo Serafin 1 and Giorgio Grisetti 1 Abstract In this paper we present a novel on-line method to recursively align point clouds. By considering each
NICP: Dense Normal Based Point Cloud Registration Jacopo Serafin 1 and Giorgio Grisetti 1 Abstract In this paper we present a novel on-line method to recursively align point clouds. By considering each
Adaptive Point Cloud Rendering
 1 Adaptive Point Cloud Rendering Project Plan Final Group: May13-11 Christopher Jeffers Eric Jensen Joel Rausch Client: Siemens PLM Software Client Contact: Michael Carter Adviser: Simanta Mitra 4/29/13
1 Adaptive Point Cloud Rendering Project Plan Final Group: May13-11 Christopher Jeffers Eric Jensen Joel Rausch Client: Siemens PLM Software Client Contact: Michael Carter Adviser: Simanta Mitra 4/29/13
Compact and Accurate 3-D Face Modeling Using an RGB-D Camera: Let s Open the Door to 3-D Video Conference
 2013 IEEE International Conference on Computer Vision Workshops Compact and Accurate 3-D Face Modeling Using an RGB-D Camera: Let s Open the Door to 3-D Video Conference Pavan Kumar Anasosalu, University
2013 IEEE International Conference on Computer Vision Workshops Compact and Accurate 3-D Face Modeling Using an RGB-D Camera: Let s Open the Door to 3-D Video Conference Pavan Kumar Anasosalu, University
3D Scanning. Lecture courtesy of Szymon Rusinkiewicz Princeton University
 3D Scanning Lecture courtesy of Szymon Rusinkiewicz Princeton University Computer Graphics Pipeline 3D Scanning Shape Motion Rendering Lighting and Reflectance Human time = expensive Sensors = cheap Computer
3D Scanning Lecture courtesy of Szymon Rusinkiewicz Princeton University Computer Graphics Pipeline 3D Scanning Shape Motion Rendering Lighting and Reflectance Human time = expensive Sensors = cheap Computer
CS 563 Advanced Topics in Computer Graphics QSplat. by Matt Maziarz
 CS 563 Advanced Topics in Computer Graphics QSplat by Matt Maziarz Outline Previous work in area Background Overview In-depth look File structure Performance Future Point Rendering To save on setup and
CS 563 Advanced Topics in Computer Graphics QSplat by Matt Maziarz Outline Previous work in area Background Overview In-depth look File structure Performance Future Point Rendering To save on setup and
THREE PRE-PROCESSING STEPS TO INCREASE THE QUALITY OF KINECT RANGE DATA
 THREE PRE-PROCESSING STEPS TO INCREASE THE QUALITY OF KINECT RANGE DATA M. Davoodianidaliki a, *, M. Saadatseresht a a Dept. of Surveying and Geomatics, Faculty of Engineering, University of Tehran, Tehran,
THREE PRE-PROCESSING STEPS TO INCREASE THE QUALITY OF KINECT RANGE DATA M. Davoodianidaliki a, *, M. Saadatseresht a a Dept. of Surveying and Geomatics, Faculty of Engineering, University of Tehran, Tehran,
Point based Rendering
 Point based Rendering CS535 Daniel Aliaga Current Standards Traditionally, graphics has worked with triangles as the rendering primitive Triangles are really just the lowest common denominator for surfaces
Point based Rendering CS535 Daniel Aliaga Current Standards Traditionally, graphics has worked with triangles as the rendering primitive Triangles are really just the lowest common denominator for surfaces
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Hierarchical Volumetric Fusion of Depth Images
 Hierarchical Volumetric Fusion of Depth Images László Szirmay-Kalos, Milán Magdics Balázs Tóth, Tamás Umenhoffer Real-time color & 3D information Affordable integrated depth and color cameras Application:
Hierarchical Volumetric Fusion of Depth Images László Szirmay-Kalos, Milán Magdics Balázs Tóth, Tamás Umenhoffer Real-time color & 3D information Affordable integrated depth and color cameras Application:
Moving Object Detection by Connected Component Labeling of Point Cloud Registration Outliers on the GPU
 Moving Object Detection by Connected Component Labeling of Point Cloud Registration Outliers on the GPU Michael Korn, Daniel Sanders and Josef Pauli Intelligent Systems Group, University of Duisburg-Essen,
Moving Object Detection by Connected Component Labeling of Point Cloud Registration Outliers on the GPU Michael Korn, Daniel Sanders and Josef Pauli Intelligent Systems Group, University of Duisburg-Essen,
3D Reconstruction with Tango. Ivan Dryanovski, Google Inc.
 3D Reconstruction with Tango Ivan Dryanovski, Google Inc. Contents Problem statement and motivation The Tango SDK 3D reconstruction - data structures & algorithms Applications Developer tools Problem formulation
3D Reconstruction with Tango Ivan Dryanovski, Google Inc. Contents Problem statement and motivation The Tango SDK 3D reconstruction - data structures & algorithms Applications Developer tools Problem formulation
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Replacing Projective Data Association with Lucas-Kanade for KinectFusion
 Replacing Projective Data Association with Lucas-Kanade for KinectFusion Brian Peasley and Stan Birchfield Electrical and Computer Engineering Dept. Clemson University, Clemson, SC 29634 {bpeasle,stb}@clemson.edu
Replacing Projective Data Association with Lucas-Kanade for KinectFusion Brian Peasley and Stan Birchfield Electrical and Computer Engineering Dept. Clemson University, Clemson, SC 29634 {bpeasle,stb}@clemson.edu
3D Environment Reconstruction
 3D Environment Reconstruction Using Modified Color ICP Algorithm by Fusion of a Camera and a 3D Laser Range Finder The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15,
3D Environment Reconstruction Using Modified Color ICP Algorithm by Fusion of a Camera and a 3D Laser Range Finder The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15,
3D Graphics for Game Programming (J. Han) Chapter II Vertex Processing
 Chapter II Vertex Processing") Chapter II Vertex Processing Rendering Pipeline Main stages in the pipeline The vertex processing stage operates on every input vertex stored in the vertex buffer and performs various operations such as
Chapter II Vertex Processing Rendering Pipeline Main stages in the pipeline The vertex processing stage operates on every input vertex stored in the vertex buffer and performs various operations such as
From Structure-from-Motion Point Clouds to Fast Location Recognition
 From Structure-from-Motion Point Clouds to Fast Location Recognition Arnold Irschara1;2, Christopher Zach2, Jan-Michael Frahm2, Horst Bischof1 1Graz University of Technology firschara, bischofg@icg.tugraz.at
From Structure-from-Motion Point Clouds to Fast Location Recognition Arnold Irschara1;2, Christopher Zach2, Jan-Michael Frahm2, Horst Bischof1 1Graz University of Technology firschara, bischofg@icg.tugraz.at
CITS 4402 Computer Vision
 CITS 4402 Computer Vision Prof Ajmal Mian Lecture 12 3D Shape Analysis & Matching Overview of this lecture Revision of 3D shape acquisition techniques Representation of 3D data Applying 2D image techniques
CITS 4402 Computer Vision Prof Ajmal Mian Lecture 12 3D Shape Analysis & Matching Overview of this lecture Revision of 3D shape acquisition techniques Representation of 3D data Applying 2D image techniques
Robust Registration of Narrow-Field-of-View Range Images
 Robust Registration of Narrow-Field-of-View Range Images Stefan May Rainer Koch Robert Scherlipp Andreas Nüchter Faculty of Electrical Engineering and Fine Mechanics, Georg-Simon-Ohm University of Applied
Robust Registration of Narrow-Field-of-View Range Images Stefan May Rainer Koch Robert Scherlipp Andreas Nüchter Faculty of Electrical Engineering and Fine Mechanics, Georg-Simon-Ohm University of Applied
TEXTURE OVERLAY ONTO NON-RIGID SURFACE USING COMMODITY DEPTH CAMERA
 TEXTURE OVERLAY ONTO NON-RIGID SURFACE USING COMMODITY DEPTH CAMERA Tomoki Hayashi 1, Francois de Sorbier 1 and Hideo Saito 1 1 Graduate School of Science and Technology, Keio University, 3-14-1 Hiyoshi,
TEXTURE OVERLAY ONTO NON-RIGID SURFACE USING COMMODITY DEPTH CAMERA Tomoki Hayashi 1, Francois de Sorbier 1 and Hideo Saito 1 1 Graduate School of Science and Technology, Keio University, 3-14-1 Hiyoshi,
Direct Rendering of Trimmed NURBS Surfaces
 Direct Rendering of Trimmed NURBS Surfaces Hardware Graphics Pipeline 2/ 81 Hardware Graphics Pipeline GPU Video Memory CPU Vertex Processor Raster Unit Fragment Processor Render Target Screen Extended
Direct Rendering of Trimmed NURBS Surfaces Hardware Graphics Pipeline 2/ 81 Hardware Graphics Pipeline GPU Video Memory CPU Vertex Processor Raster Unit Fragment Processor Render Target Screen Extended
A Real-Time RGB-D Registration and Mapping Approach by Heuristically Switching Between Photometric And Geometric Information
 A Real-Time RGB-D Registration and Mapping Approach by Heuristically Switching Between Photometric And Geometric Information The 17th International Conference on Information Fusion (Fusion 2014) Khalid
A Real-Time RGB-D Registration and Mapping Approach by Heuristically Switching Between Photometric And Geometric Information The 17th International Conference on Information Fusion (Fusion 2014) Khalid
Real-Time Plane Segmentation and Obstacle Detection of 3D Point Clouds for Indoor Scenes
 Real-Time Plane Segmentation and Obstacle Detection of 3D Point Clouds for Indoor Scenes Zhe Wang, Hong Liu, Yueliang Qian, and Tao Xu Key Laboratory of Intelligent Information Processing && Beijing Key
Real-Time Plane Segmentation and Obstacle Detection of 3D Point Clouds for Indoor Scenes Zhe Wang, Hong Liu, Yueliang Qian, and Tao Xu Key Laboratory of Intelligent Information Processing && Beijing Key
Eye Contact over Video
 Eye Contact over Video Jesper Kjeldskov jesper@cs.aau.dk Jacob H. Smedegård jhaubach @cs.aau.dk Thomas S. Nielsen primogens@gmail.com Mikael B. Skov dubois@cs.aau.dk Jeni Paay jeni@cs.aau.dk Abstract Video
Eye Contact over Video Jesper Kjeldskov jesper@cs.aau.dk Jacob H. Smedegård jhaubach @cs.aau.dk Thomas S. Nielsen primogens@gmail.com Mikael B. Skov dubois@cs.aau.dk Jeni Paay jeni@cs.aau.dk Abstract Video
Spring 2009 Prof. Hyesoon Kim
 Spring 2009 Prof. Hyesoon Kim Application Geometry Rasterizer CPU Each stage cane be also pipelined The slowest of the pipeline stage determines the rendering speed. Frames per second (fps) Executes on
Spring 2009 Prof. Hyesoon Kim Application Geometry Rasterizer CPU Each stage cane be also pipelined The slowest of the pipeline stage determines the rendering speed. Frames per second (fps) Executes on
Advances in 3D data processing and 3D cameras
 Advances in 3D data processing and 3D cameras Miguel Cazorla Grupo de Robótica y Visión Tridimensional Universidad de Alicante Contents Cameras and 3D images 3D data compression 3D registration 3D feature
Advances in 3D data processing and 3D cameras Miguel Cazorla Grupo de Robótica y Visión Tridimensional Universidad de Alicante Contents Cameras and 3D images 3D data compression 3D registration 3D feature
Spring 2011 Prof. Hyesoon Kim
 Spring 2011 Prof. Hyesoon Kim Application Geometry Rasterizer CPU Each stage cane be also pipelined The slowest of the pipeline stage determines the rendering speed. Frames per second (fps) Executes on
Spring 2011 Prof. Hyesoon Kim Application Geometry Rasterizer CPU Each stage cane be also pipelined The slowest of the pipeline stage determines the rendering speed. Frames per second (fps) Executes on
Scan Matching. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Depth Sensors Kinect V2 A. Fornaser
 Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
3D Video Over Time. Presented on by. Daniel Kubacki
 3D Video Over Time Presented on 3-10-11 by Daniel Kubacki Co-Advisors: Minh Do & Sanjay Patel This work funded by the Universal Parallel Computing Resource Center 2 What s the BIG deal? Video Rate Capture
3D Video Over Time Presented on 3-10-11 by Daniel Kubacki Co-Advisors: Minh Do & Sanjay Patel This work funded by the Universal Parallel Computing Resource Center 2 What s the BIG deal? Video Rate Capture
Direct Methods in Visual Odometry
 Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
RGB-D Object Modelling for Object Recognition and Tracking
 Margin requirements for first page 72 pt 1 in 25.4 mm RGB-D Object Modelling for Object Recognition and Tracking Johann Prankl, Aitor Aldoma, Alexander Svejda and Markus Vincze Abstract This work presents
Margin requirements for first page 72 pt 1 in 25.4 mm RGB-D Object Modelling for Object Recognition and Tracking Johann Prankl, Aitor Aldoma, Alexander Svejda and Markus Vincze Abstract This work presents
Sampling, Aliasing, & Mipmaps
 Sampling, Aliasing, & Mipmaps Last Time? Monte-Carlo Integration Importance Sampling Ray Tracing vs. Path Tracing source hemisphere What is a Pixel? Sampling & Reconstruction Filters in Computer Graphics
Sampling, Aliasing, & Mipmaps Last Time? Monte-Carlo Integration Importance Sampling Ray Tracing vs. Path Tracing source hemisphere What is a Pixel? Sampling & Reconstruction Filters in Computer Graphics
3D Scanning. Qixing Huang Feb. 9 th Slide Credit: Yasutaka Furukawa
 3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
IMAGE-BASED RENDERING
 IMAGE-BASED RENDERING 1. What is Image-Based Rendering? - The synthesis of new views of a scene from pre-recorded pictures.!"$#% "'&( )*+,-/.). #0 1 ' 2"&43+5+, 2. Why? (1) We really enjoy visual magic!
IMAGE-BASED RENDERING 1. What is Image-Based Rendering? - The synthesis of new views of a scene from pre-recorded pictures.!"$#% "'&( )*+,-/.). #0 1 ' 2"&43+5+, 2. Why? (1) We really enjoy visual magic!
Project report Augmented reality with ARToolKit
 Project report Augmented reality with ARToolKit FMA175 Image Analysis, Project Mathematical Sciences, Lund Institute of Technology Supervisor: Petter Strandmark Fredrik Larsson (dt07fl2@student.lth.se)
Project report Augmented reality with ARToolKit FMA175 Image Analysis, Project Mathematical Sciences, Lund Institute of Technology Supervisor: Petter Strandmark Fredrik Larsson (dt07fl2@student.lth.se)
Adaptive Image Sampling Based on the Human Visual System
 Adaptive Image Sampling Based on the Human Visual System Frédérique Robert *, Eric Dinet, Bernard Laget * CPE Lyon - Laboratoire LISA, Villeurbanne Cedex, France Institut d Ingénierie de la Vision, Saint-Etienne
Adaptive Image Sampling Based on the Human Visual System Frédérique Robert *, Eric Dinet, Bernard Laget * CPE Lyon - Laboratoire LISA, Villeurbanne Cedex, France Institut d Ingénierie de la Vision, Saint-Etienne
Shape from Silhouettes I CV book Szelisky
 Shape from Silhouettes I CV book Szelisky 11.6.2 Guido Gerig CS 6320, Spring 2012 (slides modified from Marc Pollefeys UNC Chapel Hill, some of the figures and slides are adapted from M. Pollefeys, J.S.
Shape from Silhouettes I CV book Szelisky 11.6.2 Guido Gerig CS 6320, Spring 2012 (slides modified from Marc Pollefeys UNC Chapel Hill, some of the figures and slides are adapted from M. Pollefeys, J.S.
Toward Online 3-D Object Segmentation and Mapping
 Toward Online 3-D Object Segmentation and Mapping Evan Herbst Peter Henry Dieter Fox Abstract We build on recent fast and accurate 3-D reconstruction techniques to segment objects during scene reconstruction.
Toward Online 3-D Object Segmentation and Mapping Evan Herbst Peter Henry Dieter Fox Abstract We build on recent fast and accurate 3-D reconstruction techniques to segment objects during scene reconstruction.
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Supplementary Material for A Multi-View Stereo Benchmark with High-Resolution Images and Multi-Camera Videos
 Supplementary Material for A Multi-View Stereo Benchmark with High-Resolution Images and Multi-Camera Videos Thomas Schöps 1 Johannes L. Schönberger 1 Silvano Galliani 2 Torsten Sattler 1 Konrad Schindler
Supplementary Material for A Multi-View Stereo Benchmark with High-Resolution Images and Multi-Camera Videos Thomas Schöps 1 Johannes L. Schönberger 1 Silvano Galliani 2 Torsten Sattler 1 Konrad Schindler
Kinect Stream Recording, Point Cloud Extraction and Point Cloud Registration Report
 Kinect Stream Recording, Point Cloud Extraction and Point Cloud Registration Report Master in Computer Science (MCS) School of Computer Science and Statistics University of Dublin Trinity College David
Kinect Stream Recording, Point Cloud Extraction and Point Cloud Registration Report Master in Computer Science (MCS) School of Computer Science and Statistics University of Dublin Trinity College David