Supplementary Material for A Multi-View Stereo Benchmark with High-Resolution Images and Multi-Camera Videos
|
|
|
- Magnus Ferguson
- 5 years ago
- Views:
Transcription
1 Supplementary Material for A Multi-View Stereo Benchmark with High-Resolution Images and Multi-Camera Videos Thomas Schöps 1 Johannes L. Schönberger 1 Silvano Galliani 2 Torsten Sattler 1 Konrad Schindler 2 Marc Pollefeys 1,4 Andreas Geiger 1,3 1 Department of Computer Science, ETH Zürich 2 Institute of Geodesy and Photogrammetry, ETH Zürich 3 Autonomous Vision Group, MPI for Intelligent Systems, Tübingen 4 Microsoft, Redmond In this supplementary document, we first show all initial datasets of our benchmark. We then give a description of the technical details of our image alignment technique. Finally, we show an experiment demonstrating the necessity of the newly proposed components of our image alignment technique. 1. Datasets We show images of all 14 initial scenes in our benchmark in Fig. 1. They consist of 7 outdoor and 7 indoor scenes. Numerous scenes contain thin structures such as the trees in forest, or a rope in playground. Several scenes also contain large homogeneous or reflective surfaces such as the floor in pipes and terrains, the walls in office, or some doors in electro. These elements make the scenes challenging for stereo algorithms. All DSLR and multi-camera rig datasets were recorded within those scenes. Fig. 2 and Fig. 3 show example images of the high-resolution multi-view stereo datasets, while Fig. 4 shows the two-view stereo datasets. We plan to extend the benchmark with additional datasets over time. 2. Image Alignment - Technical Details In this section, we give additional details on the image alignment process described in Section 3.2, Refinement of Image Alignment, in the paper. We repeat some points from the paper where necessary to improve readability. The input to the algorithm are the previously aligned colored point clouds, the images whose alignment shall be refined, and the initial values for the intrinsic and extrinsic parameters of all images. To robustify the optimization process, we leverage a multi-resolution scheme. We start from a low resolution for all images and then gradually increase it. In our implementation, we create as many image pyramid levels as is necessary for the smallest resolution to have an image area not larger than pixels. We half the image resolution in each downsampling step. Before the optimization starts, a multi-resolution point cloud is created as described in Sec. 3.2 in the paper. Fig. 6 shows an example result for one of our datasets. Each level of the resulting multi-resolution point cloud has an associated point radius, applying to all points of this level. As described in the paper, the optimization uses a cost function consisting of a sum of two terms: One of them rates the alignment of the images against the laser scan colors, while the other rates the alignment of the images against each other. The cost term can thus be stated as: C(g fixed ) + C(g variable ), (1) where g denotes point pair gradients and C(g) is Eq. 2 from the paper: C(g) = ρ 5 (I i (π i (p j )) I i (π i (p)) g(p, p j )) 2. (2) p P j=1 i I(p) The values of g variable (p, p j ) are optimized, while g fixed (p, p j ) are pre-calculated at the beginning from the colors of the laser scan, denoted as L(p), and remain fixed thereafter. For a point p, the values of g fixed are given by: 1
2 g fixed (p, p j ) = L(p j ) L(p). (3) In each iteration of the multi-resolution scheme, the current image pyramid level, but also all levels with smaller image resolution, are used in the cost function. The set P always includes all points from all levels of the multi-resolution point cloud. However, point observations are dropped if there is no suitable image pyramid level for them given the point radius, as described below. For accessing image intensities at the projected position of points in the optimization process, we determine the scale at which a point is observed and use tri-linear interpolation: In addition to projecting a point s center to the image, the point s radius is also projected. It is used to compute the diameter d (in pixels on the highest-resolution pyramid level) of an approximate disc that would result from projecting a sphere with this radius at the point position. Then, the two pyramid levels h and h + 1 whose pixel sizes are closest to the disc diameter are selected, i.e., 2 h d < 2 h+1 (if no such pyramid levels are available at the current iteration of the multi-resolution scheme, the point observation is dropped). Each of these images is sampled at the projected point center position using bilinear interpolation. The results I h (π h (p)) and I h+1 (π h+1 (p)) are then linearly interpolated according to the point s scale as (1 f) I h (π h (p)) + f I h+1 (π h+1 (p)), with f = d 2h. 2 h+1 2 h Thus, in the first iteration of the multi-resolution scheme the two pyramid levels with the smallest image resolutions are used. An illustration of this process is shown in Fig. 5. Note that the point radius as well as the image resolution differ by a factor of two between adjacent point cloud levels and between adjacent image pyramid levels, respectively. Thus, a point will be observed at an initial image pyramid level with the highest available image resolution suiting this point. If a corresponding point exists on the next point cloud level, its observation will also be on the next image pyramid level. Two images observing a point from a different distance will thus observe the same point neighborhoods from a minimum point cloud level on. Point cloud levels with a higher point radius are naturally weighted lower than levels with smaller radius since there are less points on these levels. The optimization scheme proceeds as described in the following, and specified in Algorithm 1. For each step in the multiresolution scheme, we run a number of optimization iterations until convergence or a maximum number of 300 iterations has been reached. We use the alternating optimization scheme proposed by [1]. In every iteration except the first, we first optimize all image intrinsics and poses using a Levenberg-Marquardt step, while keeping g variable (p, p j ) fixed. In a second step, we determine which of the points p are visible in which of the images, using the occlusion reasoning described in the paper. We then optimize the g variable (p, p j ) while keeping the image intrinsics and poses fixed. Afterwards, the new value of the cost function Eq. 1 is computed. If the cost did not improve over several iterations, the process converged and we continue to the next level of the multi-resolution image pyramid. Otherwise, we proceed with another iteration. Algorithm 1 High-level specification of the optimization process. for each step in the image multi-resolution scheme do for i := 0..max iterations do if i > 0 then Optimize intrinsics and poses while fixing g variable (p, p j ) Use intrinsics, poses and occlusion reasoning to determine observed points Optimize g variable (p, p j ) while fixing intrinsics and poses Compute cost (Eq. 1) if convergence then break 3. Image Alignment Component Evaluation Here, we complement the image alignment evaluations in the paper with an evaluation of two algorithmic components proposed in the paper: We verify the necessity of the gradient-based cost term by modeling constant brightness as in [1]. We therefore modify Eq. 2 to read: C(c) = ρ [ I i (π i (p)) c(p) ]. (4) p P i I(p) We verify the usefulness of the multi-resolution scheme by modifying our algorithm to operate directly on the highest resolution. In other words, we determine point neighbors within the original, full point cloud, and do not assign radii
3 to the points. All image accesses are performed with bilinear interpolation at the highest image resolution available in the multi-resolution scheme at a given point in time. For simplicity, we use a single image of the multi-camera rig for this experiment, which is aligned against a laser scan. The results are shown in Fig. 7. We note that the variant using the brightness constancy assumption diverged completely due to the discrepancy of colors across modalities (i.e., laser scan colors and image colors). Moreover, without the use of the multi-resolution scheme, the optimization gets stuck close to the initial state. References [1] Q. Zhou and V. Koltun. Color map optimization for 3d reconstruction with consumer depth cameras. In SIGGRAPH,























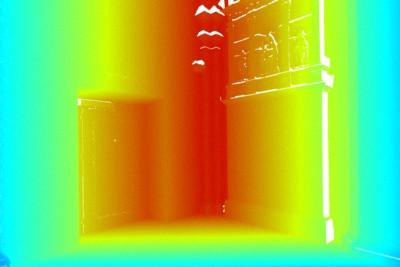




4 courtyard delivery area electro facade forest kicker meadow office pipes playground relief relief 2 terrace terrains Figure 1: Colored 3D point cloud renderings of laser scans from our benchmark, with depth maps shown below.

5 courtyard delivery area electro facade kicker meadow office Figure 2: Overview of the high-resolution multi-view stereo datasets, showing all images for each dataset (part 1).
6 pipes playground relief relief 2 terrace terrains Figure 3: Overview of the high-resolution multi-view stereo datasets, showing all images for each dataset (part 2).
















7 Figure 4: Low-resolution two-view stereo images, captured by two stereo pairs whose cameras have different fields-of-view. The images have been rectified.
, 1 (middle), and 2 (right). Bottom: Points on a surface. The neighboring points of the red points are depicted in blue (using 3 neighbors).")


8 0 1 2 Figure 5: Sketch showing the concept of point observations in the multi-resolution point cloud for multiple point cloud levels, and their relation to image pyramid levels. Shown are 3 point cloud levels numbered 0 (left), 1 (middle), and 2 (right). Bottom: Points on a surface. The neighboring points of the red points are depicted in blue (using 3 neighbors). Two images taken by the same camera observe the red points, with the orange image having twice the distance to the point than the yellow image. Top: Image pyramids for the two images with 3 image pyramid levels. In the image pyramid levels, the red point and its neighbors are shown in color if the red point s observation scale is among the two closest ones to having a point diameter of 1 pixel, and in gray otherwise. If both of these colored scales are observed, sufficient data for tri-linear interpolation is present and the point is used for the optimization process. In these cases, the two involved image scales are framed green. In this example, the two images both observe the red point at cloud level 1 but at different image pyramid levels. Figure 6: Example splat renderings of the multi-resolution point cloud point centers for the kicker dataset. From top left to bottom right: Point cloud levels 3 to 8.









9 laser scan and image initial state brightness constancy single resolution ours Figure 7: Comparison of different alignments for one image in the relief 2 scene. The laser scan is shown on the top left with its original colors, while the image to be aligned is shown below it. To the right of them, the laser scan is shown in the top row with the image projected onto it in different alignments. The middle row shows the difference image to the top left image, computed on grayscale images. In the bottom row, a cutout from the middle row is displayed with increased contrast. From left to right: Original laser scan colors and image, initial state (set manually for this example), alignment assuming brightness constancy, alignment with a single-resolution point cloud only, alignment using our complete method. Since the colors of the laser scan and the image differ strongly, a darker difference image does not necessarily mean that the alignment is better. Instead, the difference image being homogeneous is an indication for a good alignment. Note that when assuming brightness constancy, the camera intrinsics drift off such that only a small patch remains visible in the image.
Supplementary Material: Comparative Evaluation of Hand-Crafted and Learned Local Features
 Supplementary Material: Comparative Evaluation of Hand-Crafted and Learned Local Features Johannes L. Schönberger 1 Hans Hardmeier 1 Torsten Sattler 1 Marc Pollefeys 1,2 1 Department of Computer Science,
Supplementary Material: Comparative Evaluation of Hand-Crafted and Learned Local Features Johannes L. Schönberger 1 Hans Hardmeier 1 Torsten Sattler 1 Marc Pollefeys 1,2 1 Department of Computer Science,
Camera Registration in a 3D City Model. Min Ding CS294-6 Final Presentation Dec 13, 2006
 Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
6-DOF Model Based Tracking via Object Coordinate Regression Supplemental Note
 6-DOF Model Based Tracking via Object Coordinate Regression Supplemental Note Alexander Krull, Frank Michel, Eric Brachmann, Stefan Gumhold, Stephan Ihrke, Carsten Rother TU Dresden, Dresden, Germany The
6-DOF Model Based Tracking via Object Coordinate Regression Supplemental Note Alexander Krull, Frank Michel, Eric Brachmann, Stefan Gumhold, Stephan Ihrke, Carsten Rother TU Dresden, Dresden, Germany The
Lost! Leveraging the Crowd for Probabilistic Visual Self-Localization
 Lost! Leveraging the Crowd for Probabilistic Visual Self-Localization Marcus A. Brubaker (Toyota Technological Institute at Chicago) Andreas Geiger (Karlsruhe Institute of Technology & MPI Tübingen) Raquel
Lost! Leveraging the Crowd for Probabilistic Visual Self-Localization Marcus A. Brubaker (Toyota Technological Institute at Chicago) Andreas Geiger (Karlsruhe Institute of Technology & MPI Tübingen) Raquel
CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION
 CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION In this chapter we will discuss the process of disparity computation. It plays an important role in our caricature system because all 3D coordinates of nodes
CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION In this chapter we will discuss the process of disparity computation. It plays an important role in our caricature system because all 3D coordinates of nodes
Corner Detection. GV12/3072 Image Processing.
 Corner Detection 1 Last Week 2 Outline Corners and point features Moravec operator Image structure tensor Harris corner detector Sub-pixel accuracy SUSAN FAST Example descriptor: SIFT 3 Point Features
Corner Detection 1 Last Week 2 Outline Corners and point features Moravec operator Image structure tensor Harris corner detector Sub-pixel accuracy SUSAN FAST Example descriptor: SIFT 3 Point Features
S U N G - E U I YO O N, K A I S T R E N D E R I N G F R E E LY A VA I L A B L E O N T H E I N T E R N E T
 S U N G - E U I YO O N, K A I S T R E N D E R I N G F R E E LY A VA I L A B L E O N T H E I N T E R N E T Copyright 2018 Sung-eui Yoon, KAIST freely available on the internet http://sglab.kaist.ac.kr/~sungeui/render
S U N G - E U I YO O N, K A I S T R E N D E R I N G F R E E LY A VA I L A B L E O N T H E I N T E R N E T Copyright 2018 Sung-eui Yoon, KAIST freely available on the internet http://sglab.kaist.ac.kr/~sungeui/render
Semantic 3D Reconstruction of Heads Supplementary Material
 Semantic 3D Reconstruction of Heads Supplementary Material Fabio Maninchedda1, Christian Ha ne2,?, Bastien Jacquet3,?, Amae l Delaunoy?, Marc Pollefeys1,4 1 ETH Zurich 2 UC Berkeley 3 Kitware SAS 4 Microsoft
Semantic 3D Reconstruction of Heads Supplementary Material Fabio Maninchedda1, Christian Ha ne2,?, Bastien Jacquet3,?, Amae l Delaunoy?, Marc Pollefeys1,4 1 ETH Zurich 2 UC Berkeley 3 Kitware SAS 4 Microsoft
Single-shot Extrinsic Calibration of a Generically Configured RGB-D Camera Rig from Scene Constraints
 Single-shot Extrinsic Calibration of a Generically Configured RGB-D Camera Rig from Scene Constraints Jiaolong Yang*, Yuchao Dai^, Hongdong Li^, Henry Gardner^ and Yunde Jia* *Beijing Institute of Technology
Single-shot Extrinsic Calibration of a Generically Configured RGB-D Camera Rig from Scene Constraints Jiaolong Yang*, Yuchao Dai^, Hongdong Li^, Henry Gardner^ and Yunde Jia* *Beijing Institute of Technology
Motion Estimation. There are three main types (or applications) of motion estimation:
 of motion estimation:") Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
Structured Light. Tobias Nöll Thanks to Marc Pollefeys, David Nister and David Lowe
 Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera
 Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera Tomokazu Sato, Masayuki Kanbara and Naokazu Yokoya Graduate School of Information Science, Nara Institute
Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera Tomokazu Sato, Masayuki Kanbara and Naokazu Yokoya Graduate School of Information Science, Nara Institute
Lecture 16: Computer Vision
 CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
Stereo Wrap + Motion. Computer Vision I. CSE252A Lecture 17
 Stereo Wrap + Motion CSE252A Lecture 17 Some Issues Ambiguity Window size Window shape Lighting Half occluded regions Problem of Occlusion Stereo Constraints CONSTRAINT BRIEF DESCRIPTION 1-D Epipolar Search
Stereo Wrap + Motion CSE252A Lecture 17 Some Issues Ambiguity Window size Window shape Lighting Half occluded regions Problem of Occlusion Stereo Constraints CONSTRAINT BRIEF DESCRIPTION 1-D Epipolar Search
Lecture 16: Computer Vision
 CS442/542b: Artificial ntelligence Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field Methods
CS442/542b: Artificial ntelligence Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field Methods
Computer Vision I. Dense Stereo Correspondences. Anita Sellent 1/15/16
 Computer Vision I Dense Stereo Correspondences Anita Sellent Stereo Two Cameras Overlapping field of view Known transformation between cameras From disparity compute depth [ Bradski, Kaehler: Learning
Computer Vision I Dense Stereo Correspondences Anita Sellent Stereo Two Cameras Overlapping field of view Known transformation between cameras From disparity compute depth [ Bradski, Kaehler: Learning
Dense Image-based Motion Estimation Algorithms & Optical Flow
 Dense mage-based Motion Estimation Algorithms & Optical Flow Video A video is a sequence of frames captured at different times The video data is a function of v time (t) v space (x,y) ntroduction to motion
Dense mage-based Motion Estimation Algorithms & Optical Flow Video A video is a sequence of frames captured at different times The video data is a function of v time (t) v space (x,y) ntroduction to motion
Chaplin, Modern Times, 1936
 Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
A Vision System for Automatic State Determination of Grid Based Board Games
 A Vision System for Automatic State Determination of Grid Based Board Games Michael Bryson Computer Science and Engineering, University of South Carolina, 29208 Abstract. Numerous programs have been written
A Vision System for Automatic State Determination of Grid Based Board Games Michael Bryson Computer Science and Engineering, University of South Carolina, 29208 Abstract. Numerous programs have been written
Supplementary: Cross-modal Deep Variational Hand Pose Estimation
 Supplementary: Cross-modal Deep Variational Hand Pose Estimation Adrian Spurr, Jie Song, Seonwook Park, Otmar Hilliges ETH Zurich {spurra,jsong,spark,otmarh}@inf.ethz.ch Encoder/Decoder Linear(512) Table
Supplementary: Cross-modal Deep Variational Hand Pose Estimation Adrian Spurr, Jie Song, Seonwook Park, Otmar Hilliges ETH Zurich {spurra,jsong,spark,otmarh}@inf.ethz.ch Encoder/Decoder Linear(512) Table
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
SIFT - scale-invariant feature transform Konrad Schindler
 SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
Image Stitching. Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi
 Image Stitching Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi Combine two or more overlapping images to make one larger image Add example Slide credit: Vaibhav Vaish
Image Stitching Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi Combine two or more overlapping images to make one larger image Add example Slide credit: Vaibhav Vaish
Display. Introduction page 67 2D Images page 68. All Orientations page 69 Single Image page 70 3D Images page 71
 Display Introduction page 67 2D Images page 68 All Orientations page 69 Single Image page 70 3D Images page 71 Intersecting Sections page 71 Cube Sections page 72 Render page 73 1. Tissue Maps page 77
Display Introduction page 67 2D Images page 68 All Orientations page 69 Single Image page 70 3D Images page 71 Intersecting Sections page 71 Cube Sections page 72 Render page 73 1. Tissue Maps page 77
Project 2 due today Project 3 out today. Readings Szeliski, Chapter 10 (through 10.5)
") Announcements Stereo Project 2 due today Project 3 out today Single image stereogram, by Niklas Een Readings Szeliski, Chapter 10 (through 10.5) Public Library, Stereoscopic Looking Room, Chicago, by Phillips,
Announcements Stereo Project 2 due today Project 3 out today Single image stereogram, by Niklas Een Readings Szeliski, Chapter 10 (through 10.5) Public Library, Stereoscopic Looking Room, Chicago, by Phillips,
Mobile Point Fusion. Real-time 3d surface reconstruction out of depth images on a mobile platform
 Mobile Point Fusion Real-time 3d surface reconstruction out of depth images on a mobile platform Aaron Wetzler Presenting: Daniel Ben-Hoda Supervisors: Prof. Ron Kimmel Gal Kamar Yaron Honen Supported
Mobile Point Fusion Real-time 3d surface reconstruction out of depth images on a mobile platform Aaron Wetzler Presenting: Daniel Ben-Hoda Supervisors: Prof. Ron Kimmel Gal Kamar Yaron Honen Supported
Computational Optical Imaging - Optique Numerique. -- Single and Multiple View Geometry, Stereo matching --
 Computational Optical Imaging - Optique Numerique -- Single and Multiple View Geometry, Stereo matching -- Autumn 2015 Ivo Ihrke with slides by Thorsten Thormaehlen Reminder: Feature Detection and Matching
Computational Optical Imaging - Optique Numerique -- Single and Multiple View Geometry, Stereo matching -- Autumn 2015 Ivo Ihrke with slides by Thorsten Thormaehlen Reminder: Feature Detection and Matching
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Multiview Stereo COSC450. Lecture 8
 Multiview Stereo COSC450 Lecture 8 Stereo Vision So Far Stereo and epipolar geometry Fundamental matrix captures geometry 8-point algorithm Essential matrix with calibrated cameras 5-point algorithm Intersect
Multiview Stereo COSC450 Lecture 8 Stereo Vision So Far Stereo and epipolar geometry Fundamental matrix captures geometry 8-point algorithm Essential matrix with calibrated cameras 5-point algorithm Intersect
Matching. Compare region of image to region of image. Today, simplest kind of matching. Intensities similar.
 Matching Compare region of image to region of image. We talked about this for stereo. Important for motion. Epipolar constraint unknown. But motion small. Recognition Find object in image. Recognize object.
Matching Compare region of image to region of image. We talked about this for stereo. Important for motion. Epipolar constraint unknown. But motion small. Recognition Find object in image. Recognize object.
Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by ) Readings Szeliski, Chapter 10 (through 10.5)
 Readings Szeliski, Chapter 10 (through 10.5)") Announcements Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by email) One-page writeup (from project web page), specifying:» Your team members» Project goals. Be specific.
Announcements Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by email) One-page writeup (from project web page), specifying:» Your team members» Project goals. Be specific.
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve Seitz, Rick Szeliski,
ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials)
") ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials) Yinda Zhang 1,2, Sameh Khamis 1, Christoph Rhemann 1, Julien Valentin 1, Adarsh Kowdle 1, Vladimir
ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials) Yinda Zhang 1,2, Sameh Khamis 1, Christoph Rhemann 1, Julien Valentin 1, Adarsh Kowdle 1, Vladimir
Computational Optical Imaging - Optique Numerique. -- Multiple View Geometry and Stereo --
 Computational Optical Imaging - Optique Numerique -- Multiple View Geometry and Stereo -- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Feature Detection and Matching Wide-Baseline-Matching
Computational Optical Imaging - Optique Numerique -- Multiple View Geometry and Stereo -- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Feature Detection and Matching Wide-Baseline-Matching
Input. Output. Problem Definition. Rectified stereo image pair All correspondences lie in same scan lines
 Problem Definition 3 Input Rectified stereo image pair All correspondences lie in same scan lines Output Disparity map of the reference view Foreground: large disparity Background: small disparity Matching
Problem Definition 3 Input Rectified stereo image pair All correspondences lie in same scan lines Output Disparity map of the reference view Foreground: large disparity Background: small disparity Matching
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Image-Based Rendering
 Image-Based Rendering COS 526, Fall 2016 Thomas Funkhouser Acknowledgments: Dan Aliaga, Marc Levoy, Szymon Rusinkiewicz What is Image-Based Rendering? Definition 1: the use of photographic imagery to overcome
Image-Based Rendering COS 526, Fall 2016 Thomas Funkhouser Acknowledgments: Dan Aliaga, Marc Levoy, Szymon Rusinkiewicz What is Image-Based Rendering? Definition 1: the use of photographic imagery to overcome
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Alignment of Continuous Video onto 3D Point Clouds
 1 Alignment of Continuous Video onto 3D Point Clouds W. Zhao 1, D. Nister 2, and S. Hsu Sarnoff Corporation 201 Washington Road Princeton, NJ 08540, USA email: { wzhao, dnister, shsu }@sarnoff.com Tel:
1 Alignment of Continuous Video onto 3D Point Clouds W. Zhao 1, D. Nister 2, and S. Hsu Sarnoff Corporation 201 Washington Road Princeton, NJ 08540, USA email: { wzhao, dnister, shsu }@sarnoff.com Tel:
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
MONOCULAR OBJECT LOCALIZATION BY SUPERQUADRICS CURVATURE REPROJECTION AND MATCHING
 GraphiCon 2012 (Moscow, Russia) University of Trento, Italy MONOCULAR OBJECT LOCALIZATION BY SUPERQUADRICS CURVATURE REPROJECTION AND MATCHING Enrico Zappia, Ilya Afanasyev, Nicolo Biasi, Mattia Tavernini,
GraphiCon 2012 (Moscow, Russia) University of Trento, Italy MONOCULAR OBJECT LOCALIZATION BY SUPERQUADRICS CURVATURE REPROJECTION AND MATCHING Enrico Zappia, Ilya Afanasyev, Nicolo Biasi, Mattia Tavernini,
Step-by-Step Model Buidling
 Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Stereo Epipolar Geometry for General Cameras. Sanja Fidler CSC420: Intro to Image Understanding 1 / 33
 Stereo Epipolar Geometry for General Cameras Sanja Fidler CSC420: Intro to Image Understanding 1 / 33 Stereo Epipolar geometry Case with two cameras with parallel optical axes General case Now this Sanja
Stereo Epipolar Geometry for General Cameras Sanja Fidler CSC420: Intro to Image Understanding 1 / 33 Stereo Epipolar geometry Case with two cameras with parallel optical axes General case Now this Sanja
Texture. Frequency Descriptors. Frequency Descriptors. Frequency Descriptors. Frequency Descriptors. Frequency Descriptors
 Texture The most fundamental question is: How can we measure texture, i.e., how can we quantitatively distinguish between different textures? Of course it is not enough to look at the intensity of individual
Texture The most fundamental question is: How can we measure texture, i.e., how can we quantitatively distinguish between different textures? Of course it is not enough to look at the intensity of individual
What have we leaned so far?
 What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Binary Shape Characterization using Morphological Boundary Class Distribution Functions
 Binary Shape Characterization using Morphological Boundary Class Distribution Functions Marcin Iwanowski Institute of Control and Industrial Electronics, Warsaw University of Technology, ul.koszykowa 75,
Binary Shape Characterization using Morphological Boundary Class Distribution Functions Marcin Iwanowski Institute of Control and Industrial Electronics, Warsaw University of Technology, ul.koszykowa 75,
Dense 3-D Reconstruction of an Outdoor Scene by Hundreds-baseline Stereo Using a Hand-held Video Camera
 Dense 3-D Reconstruction of an Outdoor Scene by Hundreds-baseline Stereo Using a Hand-held Video Camera Tomokazu Satoy, Masayuki Kanbaray, Naokazu Yokoyay and Haruo Takemuraz ygraduate School of Information
Dense 3-D Reconstruction of an Outdoor Scene by Hundreds-baseline Stereo Using a Hand-held Video Camera Tomokazu Satoy, Masayuki Kanbaray, Naokazu Yokoyay and Haruo Takemuraz ygraduate School of Information
An Overview of Matchmoving using Structure from Motion Methods
 An Overview of Matchmoving using Structure from Motion Methods Kamyar Haji Allahverdi Pour Department of Computer Engineering Sharif University of Technology Tehran, Iran Email: allahverdi@ce.sharif.edu
An Overview of Matchmoving using Structure from Motion Methods Kamyar Haji Allahverdi Pour Department of Computer Engineering Sharif University of Technology Tehran, Iran Email: allahverdi@ce.sharif.edu
Optical Flow-Based Motion Estimation. Thanks to Steve Seitz, Simon Baker, Takeo Kanade, and anyone else who helped develop these slides.
 Optical Flow-Based Motion Estimation Thanks to Steve Seitz, Simon Baker, Takeo Kanade, and anyone else who helped develop these slides. 1 Why estimate motion? We live in a 4-D world Wide applications Object
Optical Flow-Based Motion Estimation Thanks to Steve Seitz, Simon Baker, Takeo Kanade, and anyone else who helped develop these slides. 1 Why estimate motion? We live in a 4-D world Wide applications Object
Recap from Previous Lecture
 Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Stereo. Outline. Multiple views 3/29/2017. Thurs Mar 30 Kristen Grauman UT Austin. Multi-view geometry, matching, invariant features, stereo vision
 Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Depth estimation from stereo image pairs
 Depth estimation from stereo image pairs Abhranil Das In this report I shall first present some analytical results concerning depth estimation from stereo image pairs, then describe a simple computational
Depth estimation from stereo image pairs Abhranil Das In this report I shall first present some analytical results concerning depth estimation from stereo image pairs, then describe a simple computational
SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE
 SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE S. Hirose R&D Center, TOPCON CORPORATION, 75-1, Hasunuma-cho, Itabashi-ku, Tokyo, Japan Commission
SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE S. Hirose R&D Center, TOPCON CORPORATION, 75-1, Hasunuma-cho, Itabashi-ku, Tokyo, Japan Commission
Augmenting Crowd-Sourced 3D Reconstructions using Semantic Detections: Supplementary Material
 Augmenting Crowd-Sourced 3D Reconstructions using Semantic Detections: Supplementary Material True Price 1 Johannes L. Schönberger 2 Zhen Wei 1 Marc Pollefeys 2,3 Jan-Michael Frahm 1 1 Department of Computer
Augmenting Crowd-Sourced 3D Reconstructions using Semantic Detections: Supplementary Material True Price 1 Johannes L. Schönberger 2 Zhen Wei 1 Marc Pollefeys 2,3 Jan-Michael Frahm 1 1 Department of Computer
Video Mosaics for Virtual Environments, R. Szeliski. Review by: Christopher Rasmussen
 Video Mosaics for Virtual Environments, R. Szeliski Review by: Christopher Rasmussen September 19, 2002 Announcements Homework due by midnight Next homework will be assigned Tuesday, due following Tuesday.
Video Mosaics for Virtual Environments, R. Szeliski Review by: Christopher Rasmussen September 19, 2002 Announcements Homework due by midnight Next homework will be assigned Tuesday, due following Tuesday.
Large-Scale Point Cloud Classification Benchmark
 Large-Scale Point Cloud Classification Benchmark www.semantic3d.net IGP & CVG, ETH Zürich www.semantic3d.net, info@semantic3d.net 7/6/2016 1 Timo Hackel Nikolay Savinov Ľubor Ladický Jan Dirk Wegner Konrad
Large-Scale Point Cloud Classification Benchmark www.semantic3d.net IGP & CVG, ETH Zürich www.semantic3d.net, info@semantic3d.net 7/6/2016 1 Timo Hackel Nikolay Savinov Ľubor Ladický Jan Dirk Wegner Konrad
CS4733 Class Notes, Computer Vision
 CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Supplementary Material for SphereNet: Learning Spherical Representations for Detection and Classification in Omnidirectional Images
 Supplementary Material for SphereNet: Learning Spherical Representations for Detection and Classification in Omnidirectional Images Benjamin Coors 1,3, Alexandru Paul Condurache 2,3, and Andreas Geiger
Supplementary Material for SphereNet: Learning Spherical Representations for Detection and Classification in Omnidirectional Images Benjamin Coors 1,3, Alexandru Paul Condurache 2,3, and Andreas Geiger
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
DeMoN: Depth and Motion Network for Learning Monocular Stereo Supplementary Material
 Learning rate : Depth and Motion Network for Learning Monocular Stereo Supplementary Material A. Network Architecture Details Our network is a chain of encoder-decoder networks. Figures 15 and 16 explain
Learning rate : Depth and Motion Network for Learning Monocular Stereo Supplementary Material A. Network Architecture Details Our network is a chain of encoder-decoder networks. Figures 15 and 16 explain
EECS 442: Final Project
 EECS 442: Final Project Structure From Motion Kevin Choi Robotics Ismail El Houcheimi Robotics Yih-Jye Jeffrey Hsu Robotics Abstract In this paper, we summarize the method, and results of our projective
EECS 442: Final Project Structure From Motion Kevin Choi Robotics Ismail El Houcheimi Robotics Yih-Jye Jeffrey Hsu Robotics Abstract In this paper, we summarize the method, and results of our projective
Video Georegistration: Key Challenges. Steve Blask Harris Corporation GCSD Melbourne, FL 32934
 Video Georegistration: Key Challenges Steve Blask sblask@harris.com Harris Corporation GCSD Melbourne, FL 32934 Definitions Registration: image to image alignment Find pixel-to-pixel correspondences between
Video Georegistration: Key Challenges Steve Blask sblask@harris.com Harris Corporation GCSD Melbourne, FL 32934 Definitions Registration: image to image alignment Find pixel-to-pixel correspondences between
StereoScan: Dense 3D Reconstruction in Real-time
 STANFORD UNIVERSITY, COMPUTER SCIENCE, STANFORD CS231A SPRING 2016 StereoScan: Dense 3D Reconstruction in Real-time Peirong Ji, pji@stanford.edu June 7, 2016 1 INTRODUCTION In this project, I am trying
STANFORD UNIVERSITY, COMPUTER SCIENCE, STANFORD CS231A SPRING 2016 StereoScan: Dense 3D Reconstruction in Real-time Peirong Ji, pji@stanford.edu June 7, 2016 1 INTRODUCTION In this project, I am trying
Calibration of a rotating multi-beam Lidar
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Calibration of a rotating multi-beam Lidar Naveed Muhammad 1,2 and Simon Lacroix 1,2 Abstract
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Calibration of a rotating multi-beam Lidar Naveed Muhammad 1,2 and Simon Lacroix 1,2 Abstract
CS4495/6495 Introduction to Computer Vision. 3B-L3 Stereo correspondence
 CS4495/6495 Introduction to Computer Vision 3B-L3 Stereo correspondence For now assume parallel image planes Assume parallel (co-planar) image planes Assume same focal lengths Assume epipolar lines are
CS4495/6495 Introduction to Computer Vision 3B-L3 Stereo correspondence For now assume parallel image planes Assume parallel (co-planar) image planes Assume same focal lengths Assume epipolar lines are
CONSISTENT COLOR RESAMPLE IN DIGITAL ORTHOPHOTO PRODUCTION INTRODUCTION
 CONSISTENT COLOR RESAMPLE IN DIGITAL ORTHOPHOTO PRODUCTION Yaron Katzil 1, Yerach Doytsher 2 Mapping and Geo-Information Engineering Faculty of Civil and Environmental Engineering Technion - Israel Institute
CONSISTENT COLOR RESAMPLE IN DIGITAL ORTHOPHOTO PRODUCTION Yaron Katzil 1, Yerach Doytsher 2 Mapping and Geo-Information Engineering Faculty of Civil and Environmental Engineering Technion - Israel Institute
Machine vision. Summary # 11: Stereo vision and epipolar geometry. u l = λx. v l = λy
 1 Machine vision Summary # 11: Stereo vision and epipolar geometry STEREO VISION The goal of stereo vision is to use two cameras to capture 3D scenes. There are two important problems in stereo vision:
1 Machine vision Summary # 11: Stereo vision and epipolar geometry STEREO VISION The goal of stereo vision is to use two cameras to capture 3D scenes. There are two important problems in stereo vision:
COMPUTER VISION > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE
 COMPUTER VISION 2017-2018 > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE OUTLINE Optical flow Lucas-Kanade Horn-Schunck Applications of optical flow Optical flow tracking Histograms of oriented flow Assignment
COMPUTER VISION 2017-2018 > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE OUTLINE Optical flow Lucas-Kanade Horn-Schunck Applications of optical flow Optical flow tracking Histograms of oriented flow Assignment
Motion. 1 Introduction. 2 Optical Flow. Sohaib A Khan. 2.1 Brightness Constancy Equation
 Motion Sohaib A Khan 1 Introduction So far, we have dealing with single images of a static scene taken by a fixed camera. Here we will deal with sequence of images taken at different time intervals. Motion
Motion Sohaib A Khan 1 Introduction So far, we have dealing with single images of a static scene taken by a fixed camera. Here we will deal with sequence of images taken at different time intervals. Motion
IEEE JOURNAL OF SELECTED TOPICS IN SIGNAL PROCESSING, VOL. 6, NO. 5, SEPTEMBER
 IEEE JOURNAL OF SELECTED TOPICS IN SIGNAL PROCESSING, VOL. 6, NO. 5, SEPTEMBER 2012 411 Consistent Stereo-Assisted Absolute Phase Unwrapping Methods for Structured Light Systems Ricardo R. Garcia, Student
IEEE JOURNAL OF SELECTED TOPICS IN SIGNAL PROCESSING, VOL. 6, NO. 5, SEPTEMBER 2012 411 Consistent Stereo-Assisted Absolute Phase Unwrapping Methods for Structured Light Systems Ricardo R. Garcia, Student
Model-Based Stereo. Chapter Motivation. The modeling system described in Chapter 5 allows the user to create a basic model of a
 96 Chapter 7 Model-Based Stereo 7.1 Motivation The modeling system described in Chapter 5 allows the user to create a basic model of a scene, but in general the scene will have additional geometric detail
96 Chapter 7 Model-Based Stereo 7.1 Motivation The modeling system described in Chapter 5 allows the user to create a basic model of a scene, but in general the scene will have additional geometric detail
CIS 580, Machine Perception, Spring 2016 Homework 2 Due: :59AM
 CIS 580, Machine Perception, Spring 2016 Homework 2 Due: 2015.02.24. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Recover camera orientation By observing
CIS 580, Machine Perception, Spring 2016 Homework 2 Due: 2015.02.24. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Recover camera orientation By observing
Dense Tracking and Mapping for Autonomous Quadrocopters. Jürgen Sturm
 Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Static Scene Reconstruction
 GPU supported Real-Time Scene Reconstruction with a Single Camera Jan-Michael Frahm, 3D Computer Vision group, University of North Carolina at Chapel Hill Static Scene Reconstruction 1 Capture on campus
GPU supported Real-Time Scene Reconstruction with a Single Camera Jan-Michael Frahm, 3D Computer Vision group, University of North Carolina at Chapel Hill Static Scene Reconstruction 1 Capture on campus
Visual localization using global visual features and vanishing points
 Visual localization using global visual features and vanishing points Olivier Saurer, Friedrich Fraundorfer, and Marc Pollefeys Computer Vision and Geometry Group, ETH Zürich, Switzerland {saurero,fraundorfer,marc.pollefeys}@inf.ethz.ch
Visual localization using global visual features and vanishing points Olivier Saurer, Friedrich Fraundorfer, and Marc Pollefeys Computer Vision and Geometry Group, ETH Zürich, Switzerland {saurero,fraundorfer,marc.pollefeys}@inf.ethz.ch
CRF Based Point Cloud Segmentation Jonathan Nation
 CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
Lecture 9: Epipolar Geometry
 Lecture 9: Epipolar Geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Why is stereo useful? Epipolar constraints Essential and fundamental matrix Estimating F (Problem Set 2
Lecture 9: Epipolar Geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Why is stereo useful? Epipolar constraints Essential and fundamental matrix Estimating F (Problem Set 2
Optimizing Monocular Cues for Depth Estimation from Indoor Images
 Optimizing Monocular Cues for Depth Estimation from Indoor Images Aditya Venkatraman 1, Sheetal Mahadik 2 1, 2 Department of Electronics and Telecommunication, ST Francis Institute of Technology, Mumbai,
Optimizing Monocular Cues for Depth Estimation from Indoor Images Aditya Venkatraman 1, Sheetal Mahadik 2 1, 2 Department of Electronics and Telecommunication, ST Francis Institute of Technology, Mumbai,
SPM-BP: Sped-up PatchMatch Belief Propagation for Continuous MRFs. Yu Li, Dongbo Min, Michael S. Brown, Minh N. Do, Jiangbo Lu
 SPM-BP: Sped-up PatchMatch Belief Propagation for Continuous MRFs Yu Li, Dongbo Min, Michael S. Brown, Minh N. Do, Jiangbo Lu Discrete Pixel-Labeling Optimization on MRF 2/37 Many computer vision tasks
SPM-BP: Sped-up PatchMatch Belief Propagation for Continuous MRFs Yu Li, Dongbo Min, Michael S. Brown, Minh N. Do, Jiangbo Lu Discrete Pixel-Labeling Optimization on MRF 2/37 Many computer vision tasks
FEATURE-BASED REGISTRATION OF RANGE IMAGES IN DOMESTIC ENVIRONMENTS
 FEATURE-BASED REGISTRATION OF RANGE IMAGES IN DOMESTIC ENVIRONMENTS Michael Wünstel, Thomas Röfer Technologie-Zentrum Informatik (TZI) Universität Bremen Postfach 330 440, D-28334 Bremen {wuenstel, roefer}@informatik.uni-bremen.de
FEATURE-BASED REGISTRATION OF RANGE IMAGES IN DOMESTIC ENVIRONMENTS Michael Wünstel, Thomas Röfer Technologie-Zentrum Informatik (TZI) Universität Bremen Postfach 330 440, D-28334 Bremen {wuenstel, roefer}@informatik.uni-bremen.de
Applying Synthetic Images to Learning Grasping Orientation from Single Monocular Images
 Applying Synthetic Images to Learning Grasping Orientation from Single Monocular Images 1 Introduction - Steve Chuang and Eric Shan - Determining object orientation in images is a well-established topic
Applying Synthetic Images to Learning Grasping Orientation from Single Monocular Images 1 Introduction - Steve Chuang and Eric Shan - Determining object orientation in images is a well-established topic
Fundamental matrix. Let p be a point in left image, p in right image. Epipolar relation. Epipolar mapping described by a 3x3 matrix F
 Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix F Fundamental
Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix F Fundamental
3D Photography: Stereo
 3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
CS 787: Assignment 4, Stereo Vision: Block Matching and Dynamic Programming Due: 12:00noon, Fri. Mar. 30, 2007.
 CS 787: Assignment 4, Stereo Vision: Block Matching and Dynamic Programming Due: 12:00noon, Fri. Mar. 30, 2007. In this assignment you will implement and test some simple stereo algorithms discussed in
CS 787: Assignment 4, Stereo Vision: Block Matching and Dynamic Programming Due: 12:00noon, Fri. Mar. 30, 2007. In this assignment you will implement and test some simple stereo algorithms discussed in
3D Shape Modeling by Deformable Models. Ye Duan
 3D Shape Modeling by Deformable Models Ye Duan Previous Work Shape Reconstruction from 3D data. Volumetric image datasets. Unorganized point clouds. Interactive Mesh Editing. Vertebral Dataset Vertebral
3D Shape Modeling by Deformable Models Ye Duan Previous Work Shape Reconstruction from 3D data. Volumetric image datasets. Unorganized point clouds. Interactive Mesh Editing. Vertebral Dataset Vertebral
Motion and Tracking. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Motion and Tracking Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Motion Segmentation Segment the video into multiple coherently moving objects Motion and Perceptual Organization
Motion and Tracking Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Motion Segmentation Segment the video into multiple coherently moving objects Motion and Perceptual Organization
Computer Vision 2. SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung. Computer Vision 2 Dr. Benjamin Guthier
 Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 3. HIGH DYNAMIC RANGE Computer Vision 2 Dr. Benjamin Guthier Pixel Value Content of this
Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 3. HIGH DYNAMIC RANGE Computer Vision 2 Dr. Benjamin Guthier Pixel Value Content of this
Automatic Generation of Indoor VR-Models by a Mobile Robot with a Laser Range Finder and a Color Camera
 Automatic Generation of Indoor VR-Models by a Mobile Robot with a Laser Range Finder and a Color Camera Christian Weiss and Andreas Zell Universität Tübingen, Wilhelm-Schickard-Institut für Informatik,
Automatic Generation of Indoor VR-Models by a Mobile Robot with a Laser Range Finder and a Color Camera Christian Weiss and Andreas Zell Universität Tübingen, Wilhelm-Schickard-Institut für Informatik,
LASER ECHO INTENSITY BASED TEXTURE MAPPING OF 3D SCAN MESH
 22nd CIPA Symposium, October 11-15, 2009, Kyoto, Japan LASER ECHO INTENSITY BASED TEXTURE MAPPING OF 3D SCAN MESH Zhichao ZHANG, Fan ZHANG, Xianfeng HUANG, Deren LI *, Yixuan ZHU, Pingxiang LI State Key
22nd CIPA Symposium, October 11-15, 2009, Kyoto, Japan LASER ECHO INTENSITY BASED TEXTURE MAPPING OF 3D SCAN MESH Zhichao ZHANG, Fan ZHANG, Xianfeng HUANG, Deren LI *, Yixuan ZHU, Pingxiang LI State Key
Direct Methods in Visual Odometry
 Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
Capturing, Modeling, Rendering 3D Structures
 Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Stereo matching. Francesco Isgrò. 3D Reconstruction and Stereo p.1/21
 Stereo matching Francesco Isgrò 3D Reconstruction and Stereo p.1/21 Structure of a stereo vision system Extract interesting point from each image Determine a set of matching points Compute the fundamental
Stereo matching Francesco Isgrò 3D Reconstruction and Stereo p.1/21 Structure of a stereo vision system Extract interesting point from each image Determine a set of matching points Compute the fundamental
COMPARISON OF LASER SCANNING, PHOTOGRAMMETRY AND SfM-MVS PIPELINE APPLIED IN STRUCTURES AND ARTIFICIAL SURFACES
 COMPARISON OF LASER SCANNING, PHOTOGRAMMETRY AND SfM-MVS PIPELINE APPLIED IN STRUCTURES AND ARTIFICIAL SURFACES 2012 ISPRS Melbourne, Com III/4, S.Kiparissi Cyprus University of Technology 1 / 28 Structure
COMPARISON OF LASER SCANNING, PHOTOGRAMMETRY AND SfM-MVS PIPELINE APPLIED IN STRUCTURES AND ARTIFICIAL SURFACES 2012 ISPRS Melbourne, Com III/4, S.Kiparissi Cyprus University of Technology 1 / 28 Structure
arxiv: v1 [cs.cv] 23 Apr 2017
![arxiv: v1 [cs.cv] 23 Apr 2017](/thumbs/75/72430434.jpg "arxiv: v1 [cs.cv] 23 Apr 2017") Proxy Templates for Inverse Compositional Photometric Bundle Adjustment Christopher Ham, Simon Lucey 2, and Surya Singh Robotics Design Lab 2 Robotics Institute The University of Queensland, Australia
Proxy Templates for Inverse Compositional Photometric Bundle Adjustment Christopher Ham, Simon Lucey 2, and Surya Singh Robotics Design Lab 2 Robotics Institute The University of Queensland, Australia
Stereo imaging ideal geometry
 Stereo imaging ideal geometry (X,Y,Z) Z f (x L,y L ) f (x R,y R ) Optical axes are parallel Optical axes separated by baseline, b. Line connecting lens centers is perpendicular to the optical axis, and
Stereo imaging ideal geometry (X,Y,Z) Z f (x L,y L ) f (x R,y R ) Optical axes are parallel Optical axes separated by baseline, b. Line connecting lens centers is perpendicular to the optical axis, and
Computer Vision Project-1
 University of Utah, School Of Computing Computer Vision Project- Singla, Sumedha sumedha.singla@utah.edu (00877456 February, 205 Theoretical Problems. Pinhole Camera (a A straight line in the world space
University of Utah, School Of Computing Computer Vision Project- Singla, Sumedha sumedha.singla@utah.edu (00877456 February, 205 Theoretical Problems. Pinhole Camera (a A straight line in the world space