Hierarchical Volumetric Fusion of Depth Images
|
|
|
- Evan Fitzgerald
- 5 years ago
- Views:
Transcription
1 Hierarchical Volumetric Fusion of Depth Images László Szirmay-Kalos, Milán Magdics Balázs Tóth, Tamás Umenhoffer



2 Real-time color & 3D information Affordable integrated depth and color cameras


3 Application: 3D scanning




4 Application: limitations of compositing Chroma keying Augmented reality Compositing can be based on color: Fixed order No shadows No reflections, refractions, cross illumination





5 Deph compositing (Zinemath) Zinemath - ZLense
6 3D reconstruction of a point i *x * R i y i *z j*x j*y j*z k *x * ky k *z f (xc,yc,zc) p w Rpc t t (xi,yi) xi = fxc/zc xi =(X-cx)sx yi = fyc/zc yi =(Y-cy)sy (cx(c,cxy,) cy) f ( X cx )sx p w R f (Y c y ) s y zc t d( X, Y ) zc t 1 Back projection zc (X,Y)
7 3D point cloud
8 Point cloud Fusion Projection Object Dynamic camera, static scene Problems: in different images the camera changes camera tracking based on static objects in different frames different points are visible We need to maintain surface information between points Solution (Curless/Levoy): Scene is represented by an emerging distance field


9 3D reconstruction input Depth image: distance of the visible surface in each pixel Noisy and unreliable

 d d(x,y,z)")
10 Surface reconstruction Curless-Levoy algorithm Truncated Signed Distance Field (TSDF) d d(x,y,z) voxel
11 Aims Reconstruct static scenes with moving camera Real-time reconstruction GPU-based implementation Fast camera tracking Common methods (SIFT, SURF etc.) are slow Efficient, high resolution TSDF storage To reconstruct fine geometric details GPU memory is limited
12 Proposed method Two-level, hierarchical TSDF Observation: usually most of the scanned 3D space is empty Iterative reconstruction algorithm Measured depth image Camera tracking Camera pose Depths and normal vectors Macrocell refinement Distance generation 3D mesh, etc. Macrocell marking Divided cells Applications Intersected macro-cells TSDF Distance fusion
13 Hierarchical TSDF Micro-cell store Decomposed macro-cell Empty list Macro-cell array Empty macro-cell Micro cell block 8 8 8
14 Macro-cell marking visible surface not affected intersected empty Tru nca tion dist anc e macro-cells

15 Macro-cell marking: gather-style Wasteful! Project each voxel to the depth map and compare depth macro-cells
16 Scatter-style marking (but still faster) visible surface not affected intersected Visit affected voxels by ray-casting empty Tru nca tion DD A ste ps dist anc e macro-cells
17 Avoiding atomic operations Macro-cell marking Determine empty and intersected cells Without synchronization! Empty counter is intersected 20 0 Index to the block of child micro-cells is empty
18 Fusion Distance fusion Only for the previously marked micro-cells
19 Rendering Distance map generation Hierarchical DDA Different step size in the macro and micro cells ray
20 Camera tracking Iterative Closest Point (ICP) q1 Projective matching q2 R, t E (R, t ) qn p1 p2 pn 1 p i R q i t min n i Back projection of current depth Zero-crossings of the TSDF
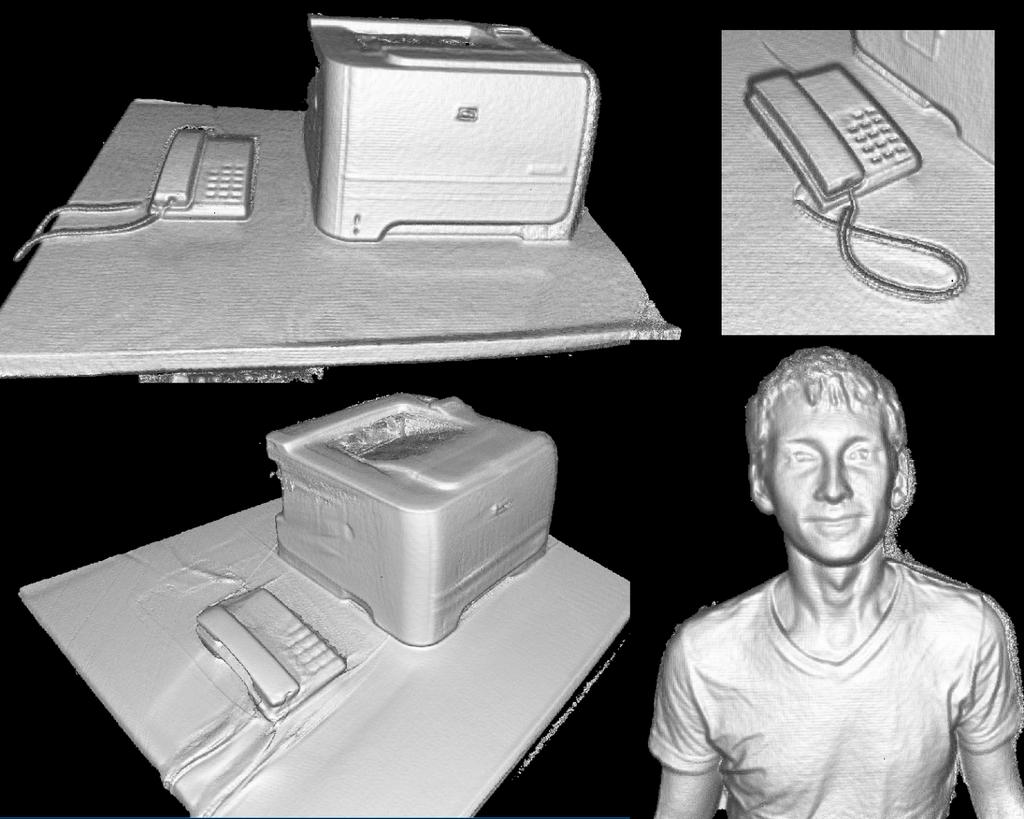
21 Results Kinect2 depth camera NVIDIA 690GTX GPU Real-time reconstruction 1mm cell resolution

22 Results With the same memory usage: 8mm vs 1mm cell size Kinect Fusion Proposed method
23 Thank you!


24 Time of flight depth sensors Pulsed modulation: Accurate time measurement expensive Continuous modulation Periodic distance
3D Reconstruction with Tango. Ivan Dryanovski, Google Inc.
 3D Reconstruction with Tango Ivan Dryanovski, Google Inc. Contents Problem statement and motivation The Tango SDK 3D reconstruction - data structures & algorithms Applications Developer tools Problem formulation
3D Reconstruction with Tango Ivan Dryanovski, Google Inc. Contents Problem statement and motivation The Tango SDK 3D reconstruction - data structures & algorithms Applications Developer tools Problem formulation
3D Computer Vision. Depth Cameras. Prof. Didier Stricker. Oliver Wasenmüller
 3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
ABSTRACT. KinectFusion is a surface reconstruction method to allow a user to rapidly
 ABSTRACT Title of Thesis: A REAL TIME IMPLEMENTATION OF 3D SYMMETRIC OBJECT RECONSTRUCTION Liangchen Xi, Master of Science, 2017 Thesis Directed By: Professor Yiannis Aloimonos Department of Computer Science
ABSTRACT Title of Thesis: A REAL TIME IMPLEMENTATION OF 3D SYMMETRIC OBJECT RECONSTRUCTION Liangchen Xi, Master of Science, 2017 Thesis Directed By: Professor Yiannis Aloimonos Department of Computer Science
Geometric Reconstruction Dense reconstruction of scene geometry
 Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Outline. 1 Why we re interested in Real-Time tracking and mapping. 3 Kinect Fusion System Overview. 4 Real-time Surface Mapping
 Outline CSE 576 KinectFusion: Real-Time Dense Surface Mapping and Tracking PhD. work from Imperial College, London Microsoft Research, Cambridge May 6, 2013 1 Why we re interested in Real-Time tracking
Outline CSE 576 KinectFusion: Real-Time Dense Surface Mapping and Tracking PhD. work from Imperial College, London Microsoft Research, Cambridge May 6, 2013 1 Why we re interested in Real-Time tracking
3D Object Representations. COS 526, Fall 2016 Princeton University
 3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
OpenCL Implementation Of A Heterogeneous Computing System For Real-time Rendering And Dynamic Updating Of Dense 3-d Volumetric Data
 OpenCL Implementation Of A Heterogeneous Computing System For Real-time Rendering And Dynamic Updating Of Dense 3-d Volumetric Data Andrew Miller Computer Vision Group Research Developer 3-D TERRAIN RECONSTRUCTION
OpenCL Implementation Of A Heterogeneous Computing System For Real-time Rendering And Dynamic Updating Of Dense 3-d Volumetric Data Andrew Miller Computer Vision Group Research Developer 3-D TERRAIN RECONSTRUCTION
3D Photography: Stereo
 3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
Mesh from Depth Images Using GR 2 T
 Mesh from Depth Images Using GR 2 T Mairead Grogan & Rozenn Dahyot School of Computer Science and Statistics Trinity College Dublin Dublin, Ireland mgrogan@tcd.ie, Rozenn.Dahyot@tcd.ie www.scss.tcd.ie/
Mesh from Depth Images Using GR 2 T Mairead Grogan & Rozenn Dahyot School of Computer Science and Statistics Trinity College Dublin Dublin, Ireland mgrogan@tcd.ie, Rozenn.Dahyot@tcd.ie www.scss.tcd.ie/
Monocular Tracking and Reconstruction in Non-Rigid Environments
 Monocular Tracking and Reconstruction in Non-Rigid Environments Kick-Off Presentation, M.Sc. Thesis Supervisors: Federico Tombari, Ph.D; Benjamin Busam, M.Sc. Patrick Ruhkamp 13.01.2017 Introduction Motivation:
Monocular Tracking and Reconstruction in Non-Rigid Environments Kick-Off Presentation, M.Sc. Thesis Supervisors: Federico Tombari, Ph.D; Benjamin Busam, M.Sc. Patrick Ruhkamp 13.01.2017 Introduction Motivation:
Active Light Time-of-Flight Imaging
 Active Light Time-of-Flight Imaging Time-of-Flight Pulse-based time-of-flight scanners [Gvili03] NOT triangulation based short infrared laser pulse is sent from camera reflection is recorded in a very
Active Light Time-of-Flight Imaging Time-of-Flight Pulse-based time-of-flight scanners [Gvili03] NOT triangulation based short infrared laser pulse is sent from camera reflection is recorded in a very
The Traditional Graphics Pipeline
 Last Time? The Traditional Graphics Pipeline Reading for Today A Practical Model for Subsurface Light Transport, Jensen, Marschner, Levoy, & Hanrahan, SIGGRAPH 2001 Participating Media Measuring BRDFs
Last Time? The Traditional Graphics Pipeline Reading for Today A Practical Model for Subsurface Light Transport, Jensen, Marschner, Levoy, & Hanrahan, SIGGRAPH 2001 Participating Media Measuring BRDFs
3D Photography: Active Ranging, Structured Light, ICP
 3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
Computer Graphics. Bing-Yu Chen National Taiwan University The University of Tokyo
 Computer Graphics Bing-Yu Chen National Taiwan University The University of Tokyo Hidden-Surface Removal Back-Face Culling The Depth-Sort Algorithm Binary Space-Partitioning Trees The z-buffer Algorithm
Computer Graphics Bing-Yu Chen National Taiwan University The University of Tokyo Hidden-Surface Removal Back-Face Culling The Depth-Sort Algorithm Binary Space-Partitioning Trees The z-buffer Algorithm
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting
 Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
The Traditional Graphics Pipeline
 Last Time? The Traditional Graphics Pipeline Participating Media Measuring BRDFs 3D Digitizing & Scattering BSSRDFs Monte Carlo Simulation Dipole Approximation Today Ray Casting / Tracing Advantages? Ray
Last Time? The Traditional Graphics Pipeline Participating Media Measuring BRDFs 3D Digitizing & Scattering BSSRDFs Monte Carlo Simulation Dipole Approximation Today Ray Casting / Tracing Advantages? Ray
OUTDOOR AND INDOOR NAVIGATION WITH MICROSOFT KINECT
 DICA-Dept. of Civil and Environmental Engineering Geodesy and Geomatics Section OUTDOOR AND INDOOR NAVIGATION WITH MICROSOFT KINECT Diana Pagliari Livio Pinto OUTLINE 2 The Microsoft Kinect sensor The
DICA-Dept. of Civil and Environmental Engineering Geodesy and Geomatics Section OUTDOOR AND INDOOR NAVIGATION WITH MICROSOFT KINECT Diana Pagliari Livio Pinto OUTLINE 2 The Microsoft Kinect sensor The
Mobile Point Fusion. Real-time 3d surface reconstruction out of depth images on a mobile platform
 Mobile Point Fusion Real-time 3d surface reconstruction out of depth images on a mobile platform Aaron Wetzler Presenting: Daniel Ben-Hoda Supervisors: Prof. Ron Kimmel Gal Kamar Yaron Honen Supported
Mobile Point Fusion Real-time 3d surface reconstruction out of depth images on a mobile platform Aaron Wetzler Presenting: Daniel Ben-Hoda Supervisors: Prof. Ron Kimmel Gal Kamar Yaron Honen Supported
Multi-View Isosurface Ray-casting
 Multi-View Isosurface Ray-casting Balázs Domonkos, Attila Egri, Tibor Fóris, Tamás Ilsinszki, and László Szirmay-Kalos Budapest University of Technology and Economics szirmay@iit.bme.hu Abstract. In this
Multi-View Isosurface Ray-casting Balázs Domonkos, Attila Egri, Tibor Fóris, Tamás Ilsinszki, and László Szirmay-Kalos Budapest University of Technology and Economics szirmay@iit.bme.hu Abstract. In this
Ray Tracing. Foley & Van Dam, Chapters 15 and 16
 Ray Tracing Foley & Van Dam, Chapters 15 and 16 Ray Tracing Visible Surface Ray Tracing (Ray Casting) Examples Efficiency Issues Computing Boolean Set Operations Recursive Ray Tracing Determine visibility
Ray Tracing Foley & Van Dam, Chapters 15 and 16 Ray Tracing Visible Surface Ray Tracing (Ray Casting) Examples Efficiency Issues Computing Boolean Set Operations Recursive Ray Tracing Determine visibility
3D Editing System for Captured Real Scenes
 3D Editing System for Captured Real Scenes Inwoo Ha, Yong Beom Lee and James D.K. Kim Samsung Advanced Institute of Technology, Youngin, South Korea E-mail: {iw.ha, leey, jamesdk.kim}@samsung.com Tel:
3D Editing System for Captured Real Scenes Inwoo Ha, Yong Beom Lee and James D.K. Kim Samsung Advanced Institute of Technology, Youngin, South Korea E-mail: {iw.ha, leey, jamesdk.kim}@samsung.com Tel:
Ray Tracing Foley & Van Dam, Chapters 15 and 16
 Foley & Van Dam, Chapters 15 and 16 (Ray Casting) Examples Efficiency Issues Computing Boolean Set Operations Recursive Determine visibility of a surface by tracing rays of light from the viewer s eye
Foley & Van Dam, Chapters 15 and 16 (Ray Casting) Examples Efficiency Issues Computing Boolean Set Operations Recursive Determine visibility of a surface by tracing rays of light from the viewer s eye
Rendering. Converting a 3D scene to a 2D image. Camera. Light. Rendering. View Plane
 Rendering Pipeline Rendering Converting a 3D scene to a 2D image Rendering Light Camera 3D Model View Plane Rendering Converting a 3D scene to a 2D image Basic rendering tasks: Modeling: creating the world
Rendering Pipeline Rendering Converting a 3D scene to a 2D image Rendering Light Camera 3D Model View Plane Rendering Converting a 3D scene to a 2D image Basic rendering tasks: Modeling: creating the world
Ray Tracing. Computer Graphics CMU /15-662, Fall 2016
 Ray Tracing Computer Graphics CMU 15-462/15-662, Fall 2016 Primitive-partitioning vs. space-partitioning acceleration structures Primitive partitioning (bounding volume hierarchy): partitions node s primitives
Ray Tracing Computer Graphics CMU 15-462/15-662, Fall 2016 Primitive-partitioning vs. space-partitioning acceleration structures Primitive partitioning (bounding volume hierarchy): partitions node s primitives
Memory Management Method for 3D Scanner Using GPGPU
 GPGPU 3D 1 2 KinectFusion GPGPU 3D., GPU., GPGPU Octree. GPU,,. Memory Management Method for 3D Scanner Using GPGPU TATSUYA MATSUMOTO 1 SATORU FUJITA 2 This paper proposes an efficient memory management
GPGPU 3D 1 2 KinectFusion GPGPU 3D., GPU., GPGPU Octree. GPU,,. Memory Management Method for 3D Scanner Using GPGPU TATSUYA MATSUMOTO 1 SATORU FUJITA 2 This paper proposes an efficient memory management
Illumination Algorithms
 Global Illumination Illumination Algorithms Digital Lighting and Rendering CGT 340 The goal of global illumination is to model all possible paths of light to the camera. Global Illumination Global illumination
Global Illumination Illumination Algorithms Digital Lighting and Rendering CGT 340 The goal of global illumination is to model all possible paths of light to the camera. Global Illumination Global illumination
Introduction to Mobile Robotics Techniques for 3D Mapping
 Introduction to Mobile Robotics Techniques for 3D Mapping Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Why 3D Representations Robots live in the 3D world. 2D maps have been applied successfully for
Introduction to Mobile Robotics Techniques for 3D Mapping Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Why 3D Representations Robots live in the 3D world. 2D maps have been applied successfully for
Multiple View Depth Generation Based on 3D Scene Reconstruction Using Heterogeneous Cameras
 https://doi.org/0.5/issn.70-7.07.7.coimg- 07, Society for Imaging Science and Technology Multiple View Generation Based on D Scene Reconstruction Using Heterogeneous Cameras Dong-Won Shin and Yo-Sung Ho
https://doi.org/0.5/issn.70-7.07.7.coimg- 07, Society for Imaging Science and Technology Multiple View Generation Based on D Scene Reconstruction Using Heterogeneous Cameras Dong-Won Shin and Yo-Sung Ho
Lecture 19: Depth Cameras. Visual Computing Systems CMU , Fall 2013
 Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Ray Tracing. CSCI 420 Computer Graphics Lecture 15. Ray Casting Shadow Rays Reflection and Transmission [Ch ]
![Ray Tracing. CSCI 420 Computer Graphics Lecture 15. Ray Casting Shadow Rays Reflection and Transmission [Ch ]](/thumbs/78/78594982.jpg "Ray Tracing. CSCI 420 Computer Graphics Lecture 15. Ray Casting Shadow Rays Reflection and Transmission [Ch ]") CSCI 420 Computer Graphics Lecture 15 Ray Tracing Ray Casting Shadow Rays Reflection and Transmission [Ch. 13.2-13.3] Jernej Barbic University of Southern California 1 Local Illumination Object illuminations
CSCI 420 Computer Graphics Lecture 15 Ray Tracing Ray Casting Shadow Rays Reflection and Transmission [Ch. 13.2-13.3] Jernej Barbic University of Southern California 1 Local Illumination Object illuminations
Camera Drones Lecture 3 3D data generation
 Camera Drones Lecture 3 3D data generation Ass.Prof. Friedrich Fraundorfer WS 2017 Outline SfM introduction SfM concept Feature matching Camera pose estimation Bundle adjustment Dense matching Data products
Camera Drones Lecture 3 3D data generation Ass.Prof. Friedrich Fraundorfer WS 2017 Outline SfM introduction SfM concept Feature matching Camera pose estimation Bundle adjustment Dense matching Data products
A consumer level 3D object scanning device using Kinect for web-based C2C business
 A consumer level 3D object scanning device using Kinect for web-based C2C business Geoffrey Poon, Yu Yin Yeung and Wai-Man Pang Caritas Institute of Higher Education Introduction Internet shopping is popular
A consumer level 3D object scanning device using Kinect for web-based C2C business Geoffrey Poon, Yu Yin Yeung and Wai-Man Pang Caritas Institute of Higher Education Introduction Internet shopping is popular
The Traditional Graphics Pipeline
 Final Projects Proposals due Thursday 4/8 Proposed project summary At least 3 related papers (read & summarized) Description of series of test cases Timeline & initial task assignment The Traditional Graphics
Final Projects Proposals due Thursday 4/8 Proposed project summary At least 3 related papers (read & summarized) Description of series of test cases Timeline & initial task assignment The Traditional Graphics
TA Section 7 Problem Set 3. SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999)
 Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999)") TA Section 7 Problem Set 3 SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999) Sam Corbett-Davies TA Section 7 02-13-2014 Distinctive Image Features from Scale-Invariant
TA Section 7 Problem Set 3 SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999) Sam Corbett-Davies TA Section 7 02-13-2014 Distinctive Image Features from Scale-Invariant
Intro to Ray-Tracing & Ray-Surface Acceleration
 Lecture 12 & 13: Intro to Ray-Tracing & Ray-Surface Acceleration Computer Graphics and Imaging UC Berkeley Course Roadmap Rasterization Pipeline Core Concepts Sampling Antialiasing Transforms Geometric
Lecture 12 & 13: Intro to Ray-Tracing & Ray-Surface Acceleration Computer Graphics and Imaging UC Berkeley Course Roadmap Rasterization Pipeline Core Concepts Sampling Antialiasing Transforms Geometric
KinectFusion: Real-Time Dense Surface Mapping and Tracking
 KinectFusion: Real-Time Dense Surface Mapping and Tracking Gabriele Bleser Thanks to Richard Newcombe for providing the ISMAR slides Overview General: scientific papers (structure, category) KinectFusion:
KinectFusion: Real-Time Dense Surface Mapping and Tracking Gabriele Bleser Thanks to Richard Newcombe for providing the ISMAR slides Overview General: scientific papers (structure, category) KinectFusion:
Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection
 Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection Svorad Štolc et al. svorad.stolc@ait.ac.at AIT Austrian Institute of Technology GmbH Center
Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection Svorad Štolc et al. svorad.stolc@ait.ac.at AIT Austrian Institute of Technology GmbH Center
Solid Modeling. Thomas Funkhouser Princeton University C0S 426, Fall Represent solid interiors of objects
 Solid Modeling Thomas Funkhouser Princeton University C0S 426, Fall 2000 Solid Modeling Represent solid interiors of objects Surface may not be described explicitly Visible Human (National Library of Medicine)
Solid Modeling Thomas Funkhouser Princeton University C0S 426, Fall 2000 Solid Modeling Represent solid interiors of objects Surface may not be described explicitly Visible Human (National Library of Medicine)
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Improved 3D Reconstruction using Combined Weighting Strategies
 Improved 3D Reconstruction using Combined Weighting Strategies Patrick Stotko Supervised by: Tim Golla Institute of Computer Science II - Computer Graphics University of Bonn Bonn / Germany Abstract Due
Improved 3D Reconstruction using Combined Weighting Strategies Patrick Stotko Supervised by: Tim Golla Institute of Computer Science II - Computer Graphics University of Bonn Bonn / Germany Abstract Due
CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018
 Qixing Huang August 29 th 2018") CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018 3D Vision Understanding geometric relations between images and the 3D world between images Obtaining 3D information
CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018 3D Vision Understanding geometric relations between images and the 3D world between images Obtaining 3D information
COMP371 COMPUTER GRAPHICS
 COMP371 COMPUTER GRAPHICS SESSION 15 RAY TRACING 1 Announcements Programming Assignment 3 out today - overview @ end of the class Ray Tracing 2 Lecture Overview Review of last class Ray Tracing 3 Local
COMP371 COMPUTER GRAPHICS SESSION 15 RAY TRACING 1 Announcements Programming Assignment 3 out today - overview @ end of the class Ray Tracing 2 Lecture Overview Review of last class Ray Tracing 3 Local
Applications of Explicit Early-Z Culling
 Applications of Explicit Early-Z Culling Jason L. Mitchell ATI Research Pedro V. Sander ATI Research Introduction In past years, in the SIGGRAPH Real-Time Shading course, we have covered the details of
Applications of Explicit Early-Z Culling Jason L. Mitchell ATI Research Pedro V. Sander ATI Research Introduction In past years, in the SIGGRAPH Real-Time Shading course, we have covered the details of
Computer Graphics. Bing-Yu Chen National Taiwan University
 Computer Graphics Bing-Yu Chen National Taiwan University Visible-Surface Determination Back-Face Culling The Depth-Sort Algorithm Binary Space-Partitioning Trees The z-buffer Algorithm Scan-Line Algorithm
Computer Graphics Bing-Yu Chen National Taiwan University Visible-Surface Determination Back-Face Culling The Depth-Sort Algorithm Binary Space-Partitioning Trees The z-buffer Algorithm Scan-Line Algorithm
ICP and 3D-Reconstruction
 N. Slottke, H. Linne 1 Nikolas Slottke 1 Hendrik Linne 2 {7slottke, 7linne}@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme
N. Slottke, H. Linne 1 Nikolas Slottke 1 Hendrik Linne 2 {7slottke, 7linne}@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme
SAMPLING AND NOISE. Increasing the number of samples per pixel gives an anti-aliased image which better represents the actual scene.
 SAMPLING AND NOISE When generating an image, Mantra must determine a color value for each pixel by examining the scene behind the image plane. Mantra achieves this by sending out a number of rays from
SAMPLING AND NOISE When generating an image, Mantra must determine a color value for each pixel by examining the scene behind the image plane. Mantra achieves this by sending out a number of rays from
Shading, lighting, & BRDF Theory. Cliff Lindsay, PHD
 Shading, lighting, & BRDF Theory Cliff Lindsay, PHD Overview of today s lecture BRDF Characteristics Lights in terms of BRDFs Classes of BRDFs Ambient light & Shadows in terms of BRDFs Decomposing Reflection
Shading, lighting, & BRDF Theory Cliff Lindsay, PHD Overview of today s lecture BRDF Characteristics Lights in terms of BRDFs Classes of BRDFs Ambient light & Shadows in terms of BRDFs Decomposing Reflection
Contents. Part I Game Engine Design 1. Introduction. Contributor Biographies. About the Editor
 Introduction Contributor Biographies About the Editor xiii xv xxi Part I Game Engine Design 1 Chapter 1 What to Look for When Evaluating Middleware for Integration 3 Jason Hughes 1.1 Middleware, How Do
Introduction Contributor Biographies About the Editor xiii xv xxi Part I Game Engine Design 1 Chapter 1 What to Look for When Evaluating Middleware for Integration 3 Jason Hughes 1.1 Middleware, How Do
PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO
 Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Enhancing Traditional Rasterization Graphics with Ray Tracing. October 2015
 Enhancing Traditional Rasterization Graphics with Ray Tracing October 2015 James Rumble Developer Technology Engineer, PowerVR Graphics Overview Ray Tracing Fundamentals PowerVR Ray Tracing Pipeline Using
Enhancing Traditional Rasterization Graphics with Ray Tracing October 2015 James Rumble Developer Technology Engineer, PowerVR Graphics Overview Ray Tracing Fundamentals PowerVR Ray Tracing Pipeline Using
Graphics and Games. Penny Rheingans University of Maryland Baltimore County
 Graphics and Games IS 101Y/CMSC 104Y First Year IT Penny Rheingans University of Maryland Baltimore County Announcements Quizzes Project Questions Other questions Questions about Reading Asst Games with
Graphics and Games IS 101Y/CMSC 104Y First Year IT Penny Rheingans University of Maryland Baltimore County Announcements Quizzes Project Questions Other questions Questions about Reading Asst Games with
High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond
 High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond New generation of interfaces Instead of interacting through indirect input devices (mice and keyboard), the user is interacting
High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond New generation of interfaces Instead of interacting through indirect input devices (mice and keyboard), the user is interacting
Geometric and Semantic 3D Reconstruction: Part 4A: Volumetric Semantic 3D Reconstruction. CVPR 2017 Tutorial Christian Häne UC Berkeley
 Geometric and Semantic 3D Reconstruction: Part 4A: Volumetric Semantic 3D Reconstruction CVPR 2017 Tutorial Christian Häne UC Berkeley Dense Multi-View Reconstruction Goal: 3D Model from Images (Depth
Geometric and Semantic 3D Reconstruction: Part 4A: Volumetric Semantic 3D Reconstruction CVPR 2017 Tutorial Christian Häne UC Berkeley Dense Multi-View Reconstruction Goal: 3D Model from Images (Depth
Schedule. MIT Monte-Carlo Ray Tracing. Radiosity. Review of last week? Limitations of radiosity. Radiosity
 Schedule Review Session: Tuesday November 18 th, 7:30 pm, Room 2-136 bring lots of questions! MIT 6.837 Monte-Carlo Ray Tracing Quiz 2: Thursday November 20 th, in class (one weeks from today) MIT EECS
Schedule Review Session: Tuesday November 18 th, 7:30 pm, Room 2-136 bring lots of questions! MIT 6.837 Monte-Carlo Ray Tracing Quiz 2: Thursday November 20 th, in class (one weeks from today) MIT EECS
MIT Monte-Carlo Ray Tracing. MIT EECS 6.837, Cutler and Durand 1
 MIT 6.837 Monte-Carlo Ray Tracing MIT EECS 6.837, Cutler and Durand 1 Schedule Review Session: Tuesday November 18 th, 7:30 pm bring lots of questions! Quiz 2: Thursday November 20 th, in class (one weeks
MIT 6.837 Monte-Carlo Ray Tracing MIT EECS 6.837, Cutler and Durand 1 Schedule Review Session: Tuesday November 18 th, 7:30 pm bring lots of questions! Quiz 2: Thursday November 20 th, in class (one weeks
Topic 12: Texture Mapping. Motivation Sources of texture Texture coordinates Bump mapping, mip-mapping & env mapping
 Topic 12: Texture Mapping Motivation Sources of texture Texture coordinates Bump mapping, mip-mapping & env mapping Texture sources: Photographs Texture sources: Procedural Texture sources: Solid textures
Topic 12: Texture Mapping Motivation Sources of texture Texture coordinates Bump mapping, mip-mapping & env mapping Texture sources: Photographs Texture sources: Procedural Texture sources: Solid textures
HISTOGRAMS OF ORIENTATIO N GRADIENTS
 HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
Active Stereo Vision. COMP 4900D Winter 2012 Gerhard Roth
 Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
Topic 11: Texture Mapping 11/13/2017. Texture sources: Solid textures. Texture sources: Synthesized
 Topic 11: Texture Mapping Motivation Sources of texture Texture coordinates Bump mapping, mip mapping & env mapping Texture sources: Photographs Texture sources: Procedural Texture sources: Solid textures
Topic 11: Texture Mapping Motivation Sources of texture Texture coordinates Bump mapping, mip mapping & env mapping Texture sources: Photographs Texture sources: Procedural Texture sources: Solid textures
c 2014 Gregory Paul Meyer
 c 2014 Gregory Paul Meyer 3D FACE MODELING WITH A CONSUMER DEPTH CAMERA BY GREGORY PAUL MEYER THESIS Submitted in partial fulfillment of the requirements for the degree of Master of Science in Electrical
c 2014 Gregory Paul Meyer 3D FACE MODELING WITH A CONSUMER DEPTH CAMERA BY GREGORY PAUL MEYER THESIS Submitted in partial fulfillment of the requirements for the degree of Master of Science in Electrical
Srikumar Ramalingam. Review. 3D Reconstruction. Pose Estimation Revisited. School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Presentation Outline 1 2 3 Sample Problem
School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Presentation Outline 1 2 3 Sample Problem
Multi-View 3D-Reconstruction
 Multi-View 3D-Reconstruction Cedric Cagniart Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 Problem Statement Given several calibrated views of an object... can we automatically
Multi-View 3D-Reconstruction Cedric Cagniart Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 Problem Statement Given several calibrated views of an object... can we automatically
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Volume Illumination. Visualisation Lecture 11. Taku Komura. Institute for Perception, Action & Behaviour School of Informatics
 Volume Illumination Visualisation Lecture 11 Taku Komura Institute for Perception, Action & Behaviour School of Informatics Taku Komura Volume Illumination & Vector Vis. 1 Previously : Volume Rendering
Volume Illumination Visualisation Lecture 11 Taku Komura Institute for Perception, Action & Behaviour School of Informatics Taku Komura Volume Illumination & Vector Vis. 1 Previously : Volume Rendering
Topic 11: Texture Mapping 10/21/2015. Photographs. Solid textures. Procedural
 Topic 11: Texture Mapping Motivation Sources of texture Texture coordinates Bump mapping, mip mapping & env mapping Topic 11: Photographs Texture Mapping Motivation Sources of texture Texture coordinates
Topic 11: Texture Mapping Motivation Sources of texture Texture coordinates Bump mapping, mip mapping & env mapping Topic 11: Photographs Texture Mapping Motivation Sources of texture Texture coordinates
Hybrid Rendering for Collaborative, Immersive Virtual Environments
 Hybrid Rendering for Collaborative, Immersive Virtual Environments Stephan Würmlin wuermlin@inf.ethz.ch Outline! Rendering techniques GBR, IBR and HR! From images to models! Novel view generation! Putting
Hybrid Rendering for Collaborative, Immersive Virtual Environments Stephan Würmlin wuermlin@inf.ethz.ch Outline! Rendering techniques GBR, IBR and HR! From images to models! Novel view generation! Putting
Volume Rendering. Computer Animation and Visualisation Lecture 9. Taku Komura. Institute for Perception, Action & Behaviour School of Informatics
 Volume Rendering Computer Animation and Visualisation Lecture 9 Taku Komura Institute for Perception, Action & Behaviour School of Informatics Volume Rendering 1 Volume Data Usually, a data uniformly distributed
Volume Rendering Computer Animation and Visualisation Lecture 9 Taku Komura Institute for Perception, Action & Behaviour School of Informatics Volume Rendering 1 Volume Data Usually, a data uniformly distributed
Previously... contour or image rendering in 2D
 Volume Rendering Visualisation Lecture 10 Taku Komura Institute for Perception, Action & Behaviour School of Informatics Volume Rendering 1 Previously... contour or image rendering in 2D 2D Contour line
Volume Rendering Visualisation Lecture 10 Taku Komura Institute for Perception, Action & Behaviour School of Informatics Volume Rendering 1 Previously... contour or image rendering in 2D 2D Contour line
Lighting. To do. Course Outline. This Lecture. Continue to work on ray programming assignment Start thinking about final project
 To do Continue to work on ray programming assignment Start thinking about final project Lighting Course Outline 3D Graphics Pipeline Modeling (Creating 3D Geometry) Mesh; modeling; sampling; Interaction
To do Continue to work on ray programming assignment Start thinking about final project Lighting Course Outline 3D Graphics Pipeline Modeling (Creating 3D Geometry) Mesh; modeling; sampling; Interaction
Generating 3D Colored Face Model Using a Kinect Camera
 Generating 3D Colored Face Model Using a Kinect Camera Submitted by: Ori Ziskind, Rotem Mordoch, Nadine Toledano Advisors: Matan Sela, Yaron Honen Geometric Image Processing Laboratory, CS, Technion March,
Generating 3D Colored Face Model Using a Kinect Camera Submitted by: Ori Ziskind, Rotem Mordoch, Nadine Toledano Advisors: Matan Sela, Yaron Honen Geometric Image Processing Laboratory, CS, Technion March,
Ray Intersection Acceleration
 Ray Intersection Acceleration CMPT 461/761 Image Synthesis Torsten Möller Reading Chapter 2, 3, 4 of Physically Based Rendering by Pharr&Humphreys An Introduction to Ray tracing by Glassner Topics today
Ray Intersection Acceleration CMPT 461/761 Image Synthesis Torsten Möller Reading Chapter 2, 3, 4 of Physically Based Rendering by Pharr&Humphreys An Introduction to Ray tracing by Glassner Topics today
Chapter 11 Global Illumination. Part 1 Ray Tracing. Reading: Angel s Interactive Computer Graphics (6 th ed.) Sections 11.1, 11.2, 11.
 Sections 11.1, 11.2, 11.") Chapter 11 Global Illumination Part 1 Ray Tracing Reading: Angel s Interactive Computer Graphics (6 th ed.) Sections 11.1, 11.2, 11.3 CG(U), Chap.11 Part 1:Ray Tracing 1 Can pipeline graphics renders images
Chapter 11 Global Illumination Part 1 Ray Tracing Reading: Angel s Interactive Computer Graphics (6 th ed.) Sections 11.1, 11.2, 11.3 CG(U), Chap.11 Part 1:Ray Tracing 1 Can pipeline graphics renders images
Signed Distance Function Representation, Tracking, and Mapping. Tanner Schmidt
 Signed Distance Function Representation, Tracking, and Mapping Tanner Schmidt Overview - Explicit and implicit surface representations SDF fusion SDF tracking Related research - KinectFusion Patch Volumes
Signed Distance Function Representation, Tracking, and Mapping Tanner Schmidt Overview - Explicit and implicit surface representations SDF fusion SDF tracking Related research - KinectFusion Patch Volumes
Single Scattering in Refractive Media with Triangle Mesh Boundaries
 Single Scattering in Refractive Media with Triangle Mesh Boundaries Bruce Walter Shuang Zhao Nicolas Holzschuch Kavita Bala Cornell Univ. Cornell Univ. Grenoble Univ. Cornell Univ. Presented at SIGGRAPH
Single Scattering in Refractive Media with Triangle Mesh Boundaries Bruce Walter Shuang Zhao Nicolas Holzschuch Kavita Bala Cornell Univ. Cornell Univ. Grenoble Univ. Cornell Univ. Presented at SIGGRAPH
Parallel Physically Based Path-tracing and Shading Part 3 of 2. CIS565 Fall 2012 University of Pennsylvania by Yining Karl Li
 Parallel Physically Based Path-tracing and Shading Part 3 of 2 CIS565 Fall 202 University of Pennsylvania by Yining Karl Li Jim Scott 2009 Spatial cceleration Structures: KD-Trees *Some portions of these
Parallel Physically Based Path-tracing and Shading Part 3 of 2 CIS565 Fall 202 University of Pennsylvania by Yining Karl Li Jim Scott 2009 Spatial cceleration Structures: KD-Trees *Some portions of these
SPURRED by the ready availability of depth sensors and
 IEEE ROBOTICS AND AUTOMATION LETTERS. PREPRINT VERSION. ACCEPTED DECEMBER, 2015 1 Hierarchical Hashing for Efficient Integration of Depth Images Olaf Kähler, Victor Prisacariu, Julien Valentin and David
IEEE ROBOTICS AND AUTOMATION LETTERS. PREPRINT VERSION. ACCEPTED DECEMBER, 2015 1 Hierarchical Hashing for Efficient Integration of Depth Images Olaf Kähler, Victor Prisacariu, Julien Valentin and David
Fog and Cloud Effects. Karl Smeltzer Alice Cao John Comstock
 Fog and Cloud Effects Karl Smeltzer Alice Cao John Comstock Goal Explore methods of rendering scenes containing fog or cloud-like effects through a variety of different techniques Atmospheric effects make
Fog and Cloud Effects Karl Smeltzer Alice Cao John Comstock Goal Explore methods of rendering scenes containing fog or cloud-like effects through a variety of different techniques Atmospheric effects make
Depth Sensors Kinect V2 A. Fornaser
 Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Real-Time High-Resolution Sparse Voxelization with. Application to Image-Based Modeling
 Real-Time High-Resolution Sparse Voxelization with Application to Image-Based Modeling Charles Loop Cha Zhang Zhengyou Zhang Goal: live free-viewpoint visualization of remote scenes Scene capture from
Real-Time High-Resolution Sparse Voxelization with Application to Image-Based Modeling Charles Loop Cha Zhang Zhengyou Zhang Goal: live free-viewpoint visualization of remote scenes Scene capture from
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows
 ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 29 January 2009 Figure 1: 3D Photography
ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 29 January 2009 Figure 1: 3D Photography
Visualization of Temperature Change using RGB-D Camera and Thermal Camera
 000 001 002 003 004 005 006 007 008 009 010 011 012 013 014 015 016 017 018 019 020 021 022 023 024 025 026 027 028 029 030 031 032 033 034 035 036 037 038 039 040 041 042 043 044 Visualization of Temperature
000 001 002 003 004 005 006 007 008 009 010 011 012 013 014 015 016 017 018 019 020 021 022 023 024 025 026 027 028 029 030 031 032 033 034 035 036 037 038 039 040 041 042 043 044 Visualization of Temperature
Personal Navigation and Indoor Mapping: Performance Characterization of Kinect Sensor-based Trajectory Recovery
 Personal Navigation and Indoor Mapping: Performance Characterization of Kinect Sensor-based Trajectory Recovery 1 Charles TOTH, 1 Dorota BRZEZINSKA, USA 2 Allison KEALY, Australia, 3 Guenther RETSCHER,
Personal Navigation and Indoor Mapping: Performance Characterization of Kinect Sensor-based Trajectory Recovery 1 Charles TOTH, 1 Dorota BRZEZINSKA, USA 2 Allison KEALY, Australia, 3 Guenther RETSCHER,
Lecture 15: Image-Based Rendering and the Light Field. Kayvon Fatahalian CMU : Graphics and Imaging Architectures (Fall 2011)
") Lecture 15: Image-Based Rendering and the Light Field Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So
Lecture 15: Image-Based Rendering and the Light Field Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So
LS-ACTS 1.0 USER MANUAL
 LS-ACTS 1.0 USER MANUAL VISION GROUP, STATE KEY LAB OF CAD&CG, ZHEJIANG UNIVERSITY HTTP://WWW.ZJUCVG.NET TABLE OF CONTENTS 1 Introduction... 1-3 1.1 Product Specification...1-3 1.2 Feature Functionalities...1-3
LS-ACTS 1.0 USER MANUAL VISION GROUP, STATE KEY LAB OF CAD&CG, ZHEJIANG UNIVERSITY HTTP://WWW.ZJUCVG.NET TABLE OF CONTENTS 1 Introduction... 1-3 1.1 Product Specification...1-3 1.2 Feature Functionalities...1-3
Srikumar Ramalingam. Review. 3D Reconstruction. Pose Estimation Revisited. School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Q K 1 u v 1 What is pose estimation?
School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Q K 1 u v 1 What is pose estimation?
CS231A Midterm Review. Friday 5/6/2016
 CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
Ray Tracing III. Wen-Chieh (Steve) Lin National Chiao-Tung University
 Lin National Chiao-Tung University") Ray Tracing III Wen-Chieh (Steve) Lin National Chiao-Tung University Shirley, Fundamentals of Computer Graphics, Chap 10 Doug James CG slides, I-Chen Lin s CG slides Ray-tracing Review For each pixel,
Ray Tracing III Wen-Chieh (Steve) Lin National Chiao-Tung University Shirley, Fundamentals of Computer Graphics, Chap 10 Doug James CG slides, I-Chen Lin s CG slides Ray-tracing Review For each pixel,
Photorealism: Ray Tracing
 Photorealism: Ray Tracing Reading Assignment: Chapter 13 Local vs. Global Illumination Local Illumination depends on local object and light sources only Global Illumination at a point can depend on any
Photorealism: Ray Tracing Reading Assignment: Chapter 13 Local vs. Global Illumination Local Illumination depends on local object and light sources only Global Illumination at a point can depend on any
Object Reconstruction
 B. Scholz Object Reconstruction 1 / 39 MIN-Fakultät Fachbereich Informatik Object Reconstruction Benjamin Scholz Universität Hamburg Fakultät für Mathematik, Informatik und Naturwissenschaften Fachbereich
B. Scholz Object Reconstruction 1 / 39 MIN-Fakultät Fachbereich Informatik Object Reconstruction Benjamin Scholz Universität Hamburg Fakultät für Mathematik, Informatik und Naturwissenschaften Fachbereich
ToF Camera for high resolution 3D images with affordable pricing
 ToF Camera for high resolution 3D images with affordable pricing Basler AG Jana Bartels, Product Manager 3D Agenda Coming next I. Basler AG II. 3D Purpose and Time-of-Flight - Working Principle III. Advantages
ToF Camera for high resolution 3D images with affordable pricing Basler AG Jana Bartels, Product Manager 3D Agenda Coming next I. Basler AG II. 3D Purpose and Time-of-Flight - Working Principle III. Advantages
CS 5630/6630 Scientific Visualization. Volume Rendering III: Unstructured Grid Techniques
 CS 5630/6630 Scientific Visualization Volume Rendering III: Unstructured Grid Techniques Unstructured Grids Image-space techniques Ray-Casting Object-space techniques Projected Tetrahedra Hybrid Incremental
CS 5630/6630 Scientific Visualization Volume Rendering III: Unstructured Grid Techniques Unstructured Grids Image-space techniques Ray-Casting Object-space techniques Projected Tetrahedra Hybrid Incremental
Other approaches to obtaining 3D structure
 Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Very High Frame Rate Volumetric Integration of Depth Images on Mobile Devices
 Very High Frame Rate Volumetric Integration of Depth Images on Mobile Devices Olaf Kähler*, Victor Adrian Prisacariu*, Carl Yuheng Ren, Xin Sun, Philip Torr, David Murray Fig. 1: Sample of the reconstruction
Very High Frame Rate Volumetric Integration of Depth Images on Mobile Devices Olaf Kähler*, Victor Adrian Prisacariu*, Carl Yuheng Ren, Xin Sun, Philip Torr, David Murray Fig. 1: Sample of the reconstruction
Last Time. Why are Shadows Important? Today. Graphics Pipeline. Clipping. Rasterization. Why are Shadows Important?
 Last Time Modeling Transformations Illumination (Shading) Real-Time Shadows Viewing Transformation (Perspective / Orthographic) Clipping Projection (to Screen Space) Graphics Pipeline Clipping Rasterization
Last Time Modeling Transformations Illumination (Shading) Real-Time Shadows Viewing Transformation (Perspective / Orthographic) Clipping Projection (to Screen Space) Graphics Pipeline Clipping Rasterization
Volumetric Scene Reconstruction from Multiple Views
 Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Piecewise-Planar 3D Reconstruction with Edge and Corner Regularization
 Piecewise-Planar 3D Reconstruction with Edge and Corner Regularization Alexandre Boulch Martin de La Gorce Renaud Marlet IMAGINE group, Université Paris-Est, LIGM, École Nationale des Ponts et Chaussées
Piecewise-Planar 3D Reconstruction with Edge and Corner Regularization Alexandre Boulch Martin de La Gorce Renaud Marlet IMAGINE group, Université Paris-Est, LIGM, École Nationale des Ponts et Chaussées
VOLUMETRIC VIDEO // PLENOPTIC LIGHTFIELD // MULTI CAMERA METHODOLOGIES JORDAN HALSEY // VR PLAYHOUSE
 VOLUMETRIC VIDEO // PLENOPTIC LIGHTFIELD // MULTI CAMERA METHODOLOGIES JORDAN HALSEY // VR PLAYHOUSE VOLUMETRIC VIDEO // PLENOPTIC LIGHTFIELD // MULTI CAMERA METHODOLOGIES Pro: Highly realistic seated
VOLUMETRIC VIDEO // PLENOPTIC LIGHTFIELD // MULTI CAMERA METHODOLOGIES JORDAN HALSEY // VR PLAYHOUSE VOLUMETRIC VIDEO // PLENOPTIC LIGHTFIELD // MULTI CAMERA METHODOLOGIES Pro: Highly realistic seated
Consider a partially transparent object that is illuminated with two lights, one visible from each side of the object. Start with a ray from the eye
 Ray Tracing What was the rendering equation? Motivate & list the terms. Relate the rendering equation to forward ray tracing. Why is forward ray tracing not good for image formation? What is the difference
Ray Tracing What was the rendering equation? Motivate & list the terms. Relate the rendering equation to forward ray tracing. Why is forward ray tracing not good for image formation? What is the difference