SIFT (Scale Invariant Feature Transform) descriptor
|
|
|
- Brian Hunt
- 6 years ago
- Views:
Transcription
1 Local descriptors
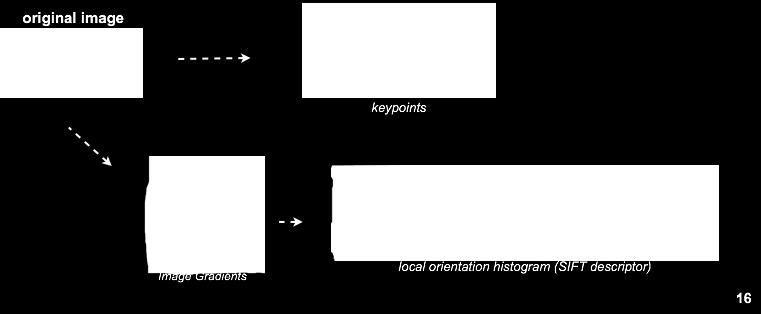
2 SIFT (Scale Invariant Feature Transform) descriptor SIFT keypoints at loca;on xy and scale σ have been obtained according to a procedure that guarantees illumina;on and scale invance. By assigning a consistent orienta;on, the SIFT keypoint descriptor can be also orienta;on invariant. SIFT descriptor is therefore obtained from the following steps: Determine loca;on and scale by maximizing DoG in scale and in space (i.e. find the blurred image of closest scale) Sample the points around the keypoint and use the keypoint local orienta;on as the dominant gradient direc;on. Use this scale and orienta;on to make all further computa;ons invariant to scale and rota;on (i.e. rotate the gradients and coordinates by the dominant orienta;on) Separate the region around the keypoint into subregions and compute a 8- bin gradient orienta;on histogram of each subregion weigthing samples with a σ = 1.5 Gaussian
3 SIFT aggrega;on window In order to derive a descriptor for the keypoint region we could sample intensi;es around the keypoint, but they are sensi;ve to ligh;ng changes and to slight errors in x, y, θ. In order to make keypoint es;mate more reliable, it is usually preferable to use a larger aggrega;on window (i.e. the Gaussian kernel size) than the detec;on window. The SIFT descriptor is hence obtained from thresholded image gradients sampled over a 16x16 array of loca;ons in the neighbourhood of the detected keypoint, using the level of the Gaussian pyramid at which the keypoint was detected. For each 4x4 region samples they are accumulated into a gradient orienta;on histogram with 8 sampled orienta;ons. In total it results into a 4x4x8 = 128 dimensional feature vector 4x4 neighbourhood region 16x16 keypoint neighbourhood A a ass keypoint 8 sampled orientations






4 SIFT Gradient orienta;on histogram The gradient magnitudes are downweighted by a Gaussian func;on (red circle) in order to reduce the influence of gradients far from the center, as these are more affected by small misregistra;ons (smoothed by a Gaussian func;on with σ equal to 1.5 the keypoint scale). The 8- bin gradient orienta;on histogram in each 4 4 quadrant, a is formed by so#ly adding the weighted gradient magnitudes. Orientation histogram Dominant direction SoX distribu;on of values to adjacent histogram bins is performed by trilinear interpola;on to reduce the effects of loca;on and dominant orienta;on mises;ma;on

5 Image from: Jonas Hurrelmann
6 SIFT illumina;on invariance The keypoint descriptor is normalized to unit length to make it invariant to intensity change, i.e. to reduce the effects of contrast or gain. To make the descriptor robust to other photometric varia;ons, gradient magnitude values are clipped to 0.2 and the resul;ng vector is once again renormalized to unit length.
7 SIFT has been empirically found to show very good performance, invariant to image rota.on, scale, intensity change, and to moderate affine transforma;ons [Mikolajczyk & Schmid 2005] s extensive survey : 80% Repeatability at: 10% image noise 45 viewing angle 1k- 100k keypoints in database
8

9 Color SIFT descriptors Local descriptors like SIFT are usually based only on luminance and shape, so they use grey- scale values and ignore color, mainly because it is very difficult to select a color model that it sufficiently robust and general. Nevertheless, color is very important to describe/dis;nguish objects or scenes Different types of descriptors can be combined to improve representa;on; the most common combina;on is between a local shape- descriptor (e.g. SIFT) and a color descriptor (e.g. color histogram in a smart color space like Luv or HSV) An example of color- SIFT (sparse) descriptor (van de Weijer and Schmid, ECCV 2006). The combined descriptor is obtained by fusion of standard SIFT and Hue descriptor Courtesy J. van de Weijer
10 Dense gray and color SIFT SIFT descriptors can also be taken at fixed loca;ons by defining a regular grid over the image. In this case at each center point, 128- d SIFT descriptors are computed. In this case the descriptor account for the distrubu;on of the gradient orienta;on but does not has scale invariance as obtained from the DoG detector. Mul;ple descriptors are therefore computed to allow for scale varia;on 128- d SIFT (128 x 3)- d SIFT
 = 512 byte.")

11 SIFT descriptors in numbers 1 patch (1 SIFT descriptor) = 128 float = 128 * 4 byte (32bit) = 512 byte. 1 image 320x240 well textured ~ 600 keypoints= 600*512 byte = byte = 300 KB. This presenta;on in memory= 51 slides = 300 KB*51 = KB ~ 15 MB...






12 SIFT: implementa;ons available SIFT: available implementa;ons: David Lowe s: first code of SIFT algorithm by its creator (only binary). OpenCV 2.2 implementa;on - wrapper from Vedaldi code. SIFT original Lowe s algorithm is quite slow (~6 sec for an image of size 1280x768): it is computa;onally expensive and copyrighted Implementa;on by Rob Hess. Best ever enta;ons: A References: C A. htp:// B. htp://opencv.willowgarage.com/documenta;on/cpp/features2d_feature_detec;on_and_descrip;on.html#six C. htp://blogs.oregonstate.edu/hess/code/six/ B


13 Rob Hess SIFT implementa;on Features: Best Open Source SIFT implementa;on in terms of speed, efficiency and similarity compared to Lowe s binary. SIFT library is writen in C with versions available for both Linux and Windows Easy to integrate with an OpenCV Project. Contains a suite of algorithms: SIFT keypoint detec;on/descrip;on KD- tree matching Robust plane- to- plane trasforma;on References: 1. htps://web.engr.oregonstate.edu/%7ehess/publica;ons/sixlib- acmmm10.pdf 2. htp://blogs.oregonstate.edu/hess/code/six/
14 Compile and Install: Unix plazorms are preferred On a debian- based simply: 1. sudo apt- get install build- essen;al libgtk2.0- dev libcv- dev libcvaux- dev 2. cd <path- to- six>/ && make all 3../bin/siXfeat - h Output: Usage: sixfeat [op;ons] <img_file> Op;ons: - h Display this message and exit - o <out_file> Output keypoints to text file - m <out_img> Output keypoint image file (format determined by extension) - i <intervals> Set number of sampled intervals per octave in scale space pyramid (default 3) - s <sigma> Set sigma for ini;al gaussian smoothing at each octave (default ) - c <thresh> Set threshold on keypoint contrast D(x) based on [0,1] pixel values (default ) - r <thresh> Set threshold on keypoint ra;o of principle curvatures (default 10) - n <width> Set width of descriptor histogram array (default 4) - b <bins> Set number of bins per histogram in descriptor array (default 8) - d Toggle image doubling (default on) - x Turn off keypoint display
15 SIFT parameters to tune ( in si#.h or as argument of./bin/si#feat) : SIFT_CONTR_THR [0.04] is the default threshold on keypoint contrast D(x). To high values correspond less but stronger keypoints and vice versa. SIFT_DESCR_HIST_BINS [8] is the default number of bins per histogram in descriptor array. Trade- off between dis;nc;veness and efficiency. SIFT_IMG_DBL [0/1] tells if the image must be resized twice before keypoint localiza;on. Increase the detectable keypoints lowering performance. NN Matching parameters to tune ( in./src/match.c) : KDTREE_BBF_MAX_NN_CHKS [200] is the maximum number of keypoint NN candidates to check during BBF search. NN_SQ_DIST_RATIO_THR [0.49] is the threshold on squared ra;o of distances between 1- st NN and 2- nd NN. Used to reject noisy matches in high dimensions.
16 SIFT alterna;ves GLOH (Gradient Loca;on and Orienta;on Histogram). larger ini;al descriptor + PCA, TPAMI 2005 SURF (Speeded Up Robust Features) faster than SIFT and some;mes more robust. ECCV (343, Google cita;ons) GIST Rapid Biologically- Inspired Scene Classifica;on Using Features Shared with Visual Aten;on, TPAMI 2007 LESH Head Pose Es;ma;on In Face Recogni;on Across Pose Scenarios, VISAPP 2008 PCA- SIFT A More Dis;nc;ve Representa;on for Local Image Descriptors, CVPR 2004 Spin Image Sparse Texture Representa;on Using Affine- Invariant Neighborhoods, CVPR 2003
 * 16 = 272 bins.")
17 GLOH (Gradient Loca;on and Orienta;on Histogram) descriptor GLOH is a method for local shape descrip;on very similar to SIFT introduced by Miko in 2005 Differently from SIFT it employs a log- polar loca;on grid: 3 bins in radial direc;on 8 bins in angular direc;on 16 bins for Gradient orienta;on quan;za;on The GLOH descriptor is therefore a higher dimensional vector with a total of 17 (i.e. 2x8+1) * 16 = 272 bins. PCA dimension reduc;on is employed in the vector representa;on space

18 Example 16 dim 2x8 +1 dim GLOH
19 SURF (Speed Up Robust Features) descriptor SURF is a performant scale and rota;on invariant interest point detector and descriptor. It approximates or even outperforms SIFT and other local descriptors with respect to repeatability, dis;nc;veness, and robustness, yet can be computed and compared much faster This is achieved by: relying on integral images for image convolu;ons building on the strengths of the leading exis;ng detectors and descriptors (using a Hessian matrix- based measure for the detector, and a distribu;on- based descriptor) simplifying these methods to the essen;al
20 The approach of SURF is similar to that of SIFT but... Integral images in conjunc;on with Haar Wavelets are used to increase robustness and decrease computa;on ;me Instead of itera;vely reducing the image size (like in the SIFT approach), the use of integral images allows the up- scaling of the filter at constant cost SIFT approach SURF approach The SURF descriptor computa;on can be divided into two tasks: Orienta;on assignment Extrac;on of descriptor components
 the integral image I is calculated by the sum of the pixel intensi;es between the point and the")
21 SURF integral images Much of the performance increase in SURF can be atributed to the usage of Integral Images: Integral Image is computed rapidly from an input image I Then it is used to speed- up the calcula;on of the area of any upright rectangular area Given an input image I and a point (x,y) the integral image I is calculated by the sum of the pixel intensi;es between the point and the origin: Using this representa;on, the cost of computa;on for a rectangular area is only 4 addi;ons
 is the cumula;ve row sum.! \" \" = y y x x y x i y x ii ', ' ') ', ( ), ( 0 ) 1, ( 0 1), ( ), ( ) 1, ( ), ( ), ( 1), ( ), ( =!")
22 The integral image ii (x,y) at loca;on x,y is an intermediate representa;on of the image i (x,y) that contains all the pixels above and to the lex of xy It can be computed in one pass over the original image integra;on along rows integra;on along columns where s(x,y) is the cumula;ve row sum.! " " = y y x x y x i y x ii ', ' ') ', ( ), ( 0 ) 1, ( 0 1), ( ), ( ) 1, ( ), ( ), ( 1), ( ), ( =! =! +! = +! = y ii x s y x s y x ii y x ii y x i y x s y x s
23 Integral Image ii(x,y) x (0,0) s(x,y) = s(x,y- 1) + i(x,y) y (x- 1,y) (x,y) ii(x,y) = ii(x- 1,y) + s(x,y) Using the integral image representa;on one can compute the value of any rectangular sum in constant ;me. For example the integral sum inside rectangle D is computed as: ii(4) + ii(1) ii(2) ii(3)
24 SURF fast Hessian Detec;on SURF detector approximates the the second- order Gaussian deriva;ves of the image at point x, also referred to as Laplacian of Gaussians (LoG) by using box filter representa;ons of the Gaussian kernels (differently from SIFT that uses instead Difference of Gaussians (DoG)). In the SURF approach interest points are detected at loca;ons where the determinant of the Hessian Matrix is maximum. SURF permits a very efficient implementa;on, making good use of integral images to perform fast convolu;ons of varying size box filters (at near costant ;me) The Hessian matrix H is calculated as a func;on of both space and scale: L xx (x, σ), L yy (x, σ), L xy (x, σ) are the second- order Gaussian deriva;ves of the image at point x (LoGs)
, L xy (x, σ)")



25 SURF LoG approxima;on Approximated second order deriva;ves (LoGs) with box filters: 0 0 The 9x9 box filters in the figure are approxima;ons of L yy (x, σ), L xy (x, σ) second- order Gaussian deriva;ves of the image at point x. A Gaussian with σ=1.2 is considered that represents the lowest scale Haar- Wavelets are simple filters which can be used to find gradients in x and y direc;ons. For each template, the corresponding feature value is the sum of the pixels' intensity lying under the black part, minus the sum of the pixels' intensity lying under the white part: x response y response When used with integral images each wavelet requires 6 opera;ons to compute
26 SURF rienta;on assignment In order to achieve invariance to image rota;on each detected interest point is assigned a reproducible orienta;on. To determine the orienta;on, Haar wavelet responses of 4σ are calculated for a set of pixels within radius 6σ of the detected point: The Haar wavelet responses are represented as vectors. The dominant orienta;on is es;mated by calcula;ng the sum of all responses within a sliding orienta;on window of 60 degrees. Circular neighborhood of radius 6σ Sliding orienta;on window: the longest vector is the dominant orienta;on 6σ (x,y,σ)
 are")
27 SURF extrac;on of descriptor components To extract descriptor components, a square window of size 20σ is taken around the interest point oriented along the dominant orienta;on. The window is divided into 4x4 regular subregions Haar wavelets of size 2σ are calculated for 25 regularly distributed sample points in each subregion The x and y wavelet responses (dx, dy) are collected for each subregion according to: Each subregion therefore contributes 4 values to the SURF descriptor vector leading to an overall vector of length 4x4x4 = 64 The green square bounds one of the 16 subregions and blue circles represent the sample points at which we compute the wavelet responses x ad y responses are calculated rela.ve to the dominant orienta.on
28 SURF computa;onal cost SURF computa;onal cost (detector and descriptor) against the most- used detectors and the SIFT descriptor:



29 SURF implementa;ons available A. Herbert Bay code (creator). Library and source code. B. OpenCV implementa;on. C. OpenSurf1 at google code. See matcher_simple.cpp in samples/cpp in OpenCV 2.2 A References: B C A. htp:// B. htp://opencv.willowgarage.com/documenta;on/cpp/features2d_feature_detec;on_and_descrip;on.html#surf C. htp://code.google.com/p/opensurf1/
30 SURF alterna;ve versions U- SURF (Upright version) For some applica;ons rota;on invariance is not necessary. U- SURF (Upright version) of SURF does not implement the orienta.on assignment step. It is faster while maintaining a robustness to rota;on of about +/- 15 degrees SURF- 128 SURF- 128 implements a descriptor vector of 128 length. The sum of dx and dx are computed separately for dy < 0 and dy > 0 (and so for dy and dy ) It is more precise and not much slower to compute, although slower to match

31 Compara;ve table for invariance of main descriptors Only moderate Van Gool 06 SURF Only moderate Fei- Fei Li
32 Affine Invariant Descriptors Fit an ellipse to the auto- correla;on (using eigenvalue analysis) and then use the principal axes and ra;os of this fit as the affine coordinate frame. The square root of the moment matrix can be used to transform local patches into a frame which is similar up to rota;on. Find affine normalized frame Σ = 1 T pp A Σ = 2 T qq 1 T A 1 1 Σ = AA A 2 Σ = AA T rotation Compute rota;onal invariant descriptor in this normalized frame Intensity domain spin image (2- D histogram of brightness) in the affine- normalized patch.
33 Affine invariant color moments is another affine invariant descriptor: m abc p q a (, ) b (, ) c pq = x y R x y G x y B ( x, y) dxdy region Different combina;ons of these moments are fully affine invariant Also invariant to affine transforma;on of intensity I a I + b F.Mindru et.al. Recognizing Color Paterns Irrespec;ve of Viewpoint and Illumina;on. CVPR99
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SURF. Lecture6: SURF and HOG. Integral Image. Feature Evaluation with Integral Image
 SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
Comparison of Feature Detection and Matching Approaches: SIFT and SURF
 GRD Journals- Global Research and Development Journal for Engineering Volume 2 Issue 4 March 2017 ISSN: 2455-5703 Comparison of Detection and Matching Approaches: SIFT and SURF Darshana Mistry PhD student
GRD Journals- Global Research and Development Journal for Engineering Volume 2 Issue 4 March 2017 ISSN: 2455-5703 Comparison of Detection and Matching Approaches: SIFT and SURF Darshana Mistry PhD student
Key properties of local features
 Key properties of local features Locality, robust against occlusions Must be highly distinctive, a good feature should allow for correct object identification with low probability of mismatch Easy to etract
Key properties of local features Locality, robust against occlusions Must be highly distinctive, a good feature should allow for correct object identification with low probability of mismatch Easy to etract
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
Implementation and Comparison of Feature Detection Methods in Image Mosaicing
 IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p-ISSN: 2278-8735 PP 07-11 www.iosrjournals.org Implementation and Comparison of Feature Detection Methods in Image
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p-ISSN: 2278-8735 PP 07-11 www.iosrjournals.org Implementation and Comparison of Feature Detection Methods in Image
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
Introduction. Introduction. Related Research. SIFT method. SIFT method. Distinctive Image Features from Scale-Invariant. Scale.
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
CS 4495 Computer Vision A. Bobick. CS 4495 Computer Vision. Features 2 SIFT descriptor. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
SURF: Speeded Up Robust Features. CRV Tutorial Day 2010 David Chi Chung Tam Ryerson University
 SURF: Speeded Up Robust Features CRV Tutorial Day 2010 David Chi Chung Tam Ryerson University Goals of SURF A fast interest point detector and descriptor Maintaining comparable performance with other detectors
SURF: Speeded Up Robust Features CRV Tutorial Day 2010 David Chi Chung Tam Ryerson University Goals of SURF A fast interest point detector and descriptor Maintaining comparable performance with other detectors
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
Motion illusion, rotating snakes
 Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Feature Detection and Matching
 and Matching CS4243 Computer Vision and Pattern Recognition Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore Leow Wee Kheng (CS4243) Camera Models 1 /
and Matching CS4243 Computer Vision and Pattern Recognition Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore Leow Wee Kheng (CS4243) Camera Models 1 /
Local Descriptors. CS 510 Lecture #21 April 6 rd 2015
 Local Descriptors CS 510 Lecture #21 April 6 rd 2015 A Bit of Context, Transition David G. Lowe, "Three- dimensional object recogni5on from single two- dimensional images," Ar#ficial Intelligence, 31, 3
Local Descriptors CS 510 Lecture #21 April 6 rd 2015 A Bit of Context, Transition David G. Lowe, "Three- dimensional object recogni5on from single two- dimensional images," Ar#ficial Intelligence, 31, 3
Scott Smith Advanced Image Processing March 15, Speeded-Up Robust Features SURF
 Scott Smith Advanced Image Processing March 15, 2011 Speeded-Up Robust Features SURF Overview Why SURF? How SURF works Feature detection Scale Space Rotational invariance Feature vectors SURF vs Sift Assumptions
Scott Smith Advanced Image Processing March 15, 2011 Speeded-Up Robust Features SURF Overview Why SURF? How SURF works Feature detection Scale Space Rotational invariance Feature vectors SURF vs Sift Assumptions
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm
 EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
SIFT: Scale Invariant Feature Transform
 1 / 25 SIFT: Scale Invariant Feature Transform Ahmed Othman Systems Design Department University of Waterloo, Canada October, 23, 2012 2 / 25 1 SIFT Introduction Scale-space extrema detection Keypoint
1 / 25 SIFT: Scale Invariant Feature Transform Ahmed Othman Systems Design Department University of Waterloo, Canada October, 23, 2012 2 / 25 1 SIFT Introduction Scale-space extrema detection Keypoint
Click to edit title style
 Class 2: Low-level Representation Liangliang Cao, Jan 31, 2013 EECS 6890 Topics in Information Processing Spring 2013, Columbia University http://rogerioferis.com/visualrecognitionandsearch Visual Recognition
Class 2: Low-level Representation Liangliang Cao, Jan 31, 2013 EECS 6890 Topics in Information Processing Spring 2013, Columbia University http://rogerioferis.com/visualrecognitionandsearch Visual Recognition
Feature Based Registration - Image Alignment
 Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
AK Computer Vision Feature Point Detectors and Descriptors
 AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
Feature Descriptors. CS 510 Lecture #21 April 29 th, 2013
 Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
SIFT - scale-invariant feature transform Konrad Schindler
 SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
Implementing the Scale Invariant Feature Transform(SIFT) Method
 Method") Implementing the Scale Invariant Feature Transform(SIFT) Method YU MENG and Dr. Bernard Tiddeman(supervisor) Department of Computer Science University of St. Andrews yumeng@dcs.st-and.ac.uk Abstract The
Implementing the Scale Invariant Feature Transform(SIFT) Method YU MENG and Dr. Bernard Tiddeman(supervisor) Department of Computer Science University of St. Andrews yumeng@dcs.st-and.ac.uk Abstract The
Feature Detection. Raul Queiroz Feitosa. 3/30/2017 Feature Detection 1
 Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Computer Vision. Recap: Smoothing with a Gaussian. Recap: Effect of σ on derivatives. Computer Science Tripos Part II. Dr Christopher Town
 Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
CAP 5415 Computer Vision Fall 2012
 CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
A Comparison of SIFT and SURF
 A Comparison of SIFT and SURF P M Panchal 1, S R Panchal 2, S K Shah 3 PG Student, Department of Electronics & Communication Engineering, SVIT, Vasad-388306, India 1 Research Scholar, Department of Electronics
A Comparison of SIFT and SURF P M Panchal 1, S R Panchal 2, S K Shah 3 PG Student, Department of Electronics & Communication Engineering, SVIT, Vasad-388306, India 1 Research Scholar, Department of Electronics
Local Image Features
 Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Sampling Strategies for Object Classifica6on. Gautam Muralidhar
 Sampling Strategies for Object Classifica6on Gautam Muralidhar Reference papers The Pyramid Match Kernel Grauman and Darrell Approximated Correspondences in High Dimensions Grauman and Darrell Video Google
Sampling Strategies for Object Classifica6on Gautam Muralidhar Reference papers The Pyramid Match Kernel Grauman and Darrell Approximated Correspondences in High Dimensions Grauman and Darrell Video Google
BoW model. Textual data: Bag of Words model
 BoW model Textual data: Bag of Words model With text, categoriza9on is the task of assigning a document to one or more categories based on its content. It is appropriate for: Detec9ng and indexing similar
BoW model Textual data: Bag of Words model With text, categoriza9on is the task of assigning a document to one or more categories based on its content. It is appropriate for: Detec9ng and indexing similar
Scale Invariant Feature Transform by David Lowe
 Scale Invariant Feature Transform by David Lowe Presented by: Jerry Chen Achal Dave Vaishaal Shankar Some slides from Jason Clemons Motivation Image Matching Correspondence Problem Desirable Feature Characteristics
Scale Invariant Feature Transform by David Lowe Presented by: Jerry Chen Achal Dave Vaishaal Shankar Some slides from Jason Clemons Motivation Image Matching Correspondence Problem Desirable Feature Characteristics
Multi-modal Registration of Visual Data. Massimiliano Corsini Visual Computing Lab, ISTI - CNR - Italy
 Multi-modal Registration of Visual Data Massimiliano Corsini Visual Computing Lab, ISTI - CNR - Italy Overview Introduction and Background Features Detection and Description (2D case) Features Detection
Multi-modal Registration of Visual Data Massimiliano Corsini Visual Computing Lab, ISTI - CNR - Italy Overview Introduction and Background Features Detection and Description (2D case) Features Detection
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Scale Invariant Feature Transform
 Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Local invariant features
 Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Scale Invariant Feature Transform
 Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Local Image Features
 Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Building a Panorama. Matching features. Matching with Features. How do we build a panorama? Computational Photography, 6.882
 Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Image Features: Local Descriptors. Sanja Fidler CSC420: Intro to Image Understanding 1/ 58
 Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
SCALE INVARIANT FEATURE TRANSFORM (SIFT)
") 1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 09 130219 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Feature Descriptors Feature Matching Feature
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 09 130219 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Feature Descriptors Feature Matching Feature
Evaluation and comparison of interest points/regions
 Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
A Comparison of SIFT, PCA-SIFT and SURF
 A Comparison of SIFT, PCA-SIFT and SURF Luo Juan Computer Graphics Lab, Chonbuk National University, Jeonju 561-756, South Korea qiuhehappy@hotmail.com Oubong Gwun Computer Graphics Lab, Chonbuk National
A Comparison of SIFT, PCA-SIFT and SURF Luo Juan Computer Graphics Lab, Chonbuk National University, Jeonju 561-756, South Korea qiuhehappy@hotmail.com Oubong Gwun Computer Graphics Lab, Chonbuk National
Local Features Tutorial: Nov. 8, 04
 Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
Object Detection by Point Feature Matching using Matlab
 Object Detection by Point Feature Matching using Matlab 1 Faishal Badsha, 2 Rafiqul Islam, 3,* Mohammad Farhad Bulbul 1 Department of Mathematics and Statistics, Bangladesh University of Business and Technology,
Object Detection by Point Feature Matching using Matlab 1 Faishal Badsha, 2 Rafiqul Islam, 3,* Mohammad Farhad Bulbul 1 Department of Mathematics and Statistics, Bangladesh University of Business and Technology,
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT. Recap and Outline
 EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
Local Patch Descriptors
 Local Patch Descriptors Slides courtesy of Steve Seitz and Larry Zitnick CSE 803 1 How do we describe an image patch? How do we describe an image patch? Patches with similar content should have similar
Local Patch Descriptors Slides courtesy of Steve Seitz and Larry Zitnick CSE 803 1 How do we describe an image patch? How do we describe an image patch? Patches with similar content should have similar
Lecture 10 Detectors and descriptors
 Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of detectors SIFT Shape context Silvio Savarese Lecture 10-26-Feb-14 From the 3D to 2D & vice versa P =
Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of detectors SIFT Shape context Silvio Savarese Lecture 10-26-Feb-14 From the 3D to 2D & vice versa P =
Lecture 4.1 Feature descriptors. Trym Vegard Haavardsholm
 Lecture 4.1 Feature descriptors Trym Vegard Haavardsholm Feature descriptors Histogram of Gradients (HoG) descriptors Binary descriptors 2 Histogram of Gradients (HOG) descriptors Scale Invariant Feature
Lecture 4.1 Feature descriptors Trym Vegard Haavardsholm Feature descriptors Histogram of Gradients (HoG) descriptors Binary descriptors 2 Histogram of Gradients (HOG) descriptors Scale Invariant Feature
Local Image Features
 Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
(More) Algorithms for Cameras: Edge Detec8on Modeling Cameras/Objects. Connelly Barnes
 Algorithms for Cameras: Edge Detec8on Modeling Cameras/Objects. Connelly Barnes") (More) Algorithms for Cameras: Edge Detec8on Modeling Cameras/Objects Connelly Barnes Acknowledgment: Many slides from James Hays, also Derek Hoiem Grauman&Leibe 2008 Outline Edge Detec)on: Canny, etc.
(More) Algorithms for Cameras: Edge Detec8on Modeling Cameras/Objects Connelly Barnes Acknowledgment: Many slides from James Hays, also Derek Hoiem Grauman&Leibe 2008 Outline Edge Detec)on: Canny, etc.
Yudistira Pictures; Universitas Brawijaya
 Evaluation of Feature Detector-Descriptor for Real Object Matching under Various Conditions of Ilumination and Affine Transformation Novanto Yudistira1, Achmad Ridok2, Moch Ali Fauzi3 1) Yudistira Pictures;
Evaluation of Feature Detector-Descriptor for Real Object Matching under Various Conditions of Ilumination and Affine Transformation Novanto Yudistira1, Achmad Ridok2, Moch Ali Fauzi3 1) Yudistira Pictures;
Anno accademico 2006/2007. Davide Migliore
 Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
3D Object Recognition using Multiclass SVM-KNN
 3D Object Recognition using Multiclass SVM-KNN R. Muralidharan, C. Chandradekar April 29, 2014 Presented by: Tasadduk Chowdhury Problem We address the problem of recognizing 3D objects based on various
3D Object Recognition using Multiclass SVM-KNN R. Muralidharan, C. Chandradekar April 29, 2014 Presented by: Tasadduk Chowdhury Problem We address the problem of recognizing 3D objects based on various
Image Processing. Image Features
 Image Processing Image Features Preliminaries 2 What are Image Features? Anything. What they are used for? Some statements about image fragments (patches) recognition Search for similar patches matching
Image Processing Image Features Preliminaries 2 What are Image Features? Anything. What they are used for? Some statements about image fragments (patches) recognition Search for similar patches matching
Click to edit title style
 Class 3: Low-level Representation Liangliang Cao, Feb 6, 2014 EECS 6890 Topics in Information Processing Spring 2014, Columbia University http://rogerioferis.com/visualrecognitionandsearch2014 Visual Recognition
Class 3: Low-level Representation Liangliang Cao, Feb 6, 2014 EECS 6890 Topics in Information Processing Spring 2014, Columbia University http://rogerioferis.com/visualrecognitionandsearch2014 Visual Recognition
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
2D Image Processing Feature Descriptors
 2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
A Novel Extreme Point Selection Algorithm in SIFT
 A Novel Extreme Point Selection Algorithm in SIFT Ding Zuchun School of Electronic and Communication, South China University of Technolog Guangzhou, China zucding@gmail.com Abstract. This paper proposes
A Novel Extreme Point Selection Algorithm in SIFT Ding Zuchun School of Electronic and Communication, South China University of Technolog Guangzhou, China zucding@gmail.com Abstract. This paper proposes
A SIFT Descriptor with Global Context
 A SIFT Descriptor with Global Context Eric N. Mortensen Oregon State University enm@eecs.oregonstate.edu Hongli Deng Oregon State University deng@eecs.oregonstate.edu Linda Shapiro University of Washington
A SIFT Descriptor with Global Context Eric N. Mortensen Oregon State University enm@eecs.oregonstate.edu Hongli Deng Oregon State University deng@eecs.oregonstate.edu Linda Shapiro University of Washington
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
Object Recognition Algorithms for Computer Vision System: A Survey
 Volume 117 No. 21 2017, 69-74 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu Object Recognition Algorithms for Computer Vision System: A Survey Anu
Volume 117 No. 21 2017, 69-74 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu Object Recognition Algorithms for Computer Vision System: A Survey Anu
Local features and image matching. Prof. Xin Yang HUST
 Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Deformable Part Models
 Deformable Part Models References: Felzenszwalb, Girshick, McAllester and Ramanan, Object Detec@on with Discrimina@vely Trained Part Based Models, PAMI 2010 Code available at hkp://www.cs.berkeley.edu/~rbg/latent/
Deformable Part Models References: Felzenszwalb, Girshick, McAllester and Ramanan, Object Detec@on with Discrimina@vely Trained Part Based Models, PAMI 2010 Code available at hkp://www.cs.berkeley.edu/~rbg/latent/
Histogram of Oriented Gradients for Human Detection
 Histogram of Oriented Gradients for Human Detection Article by Navneet Dalal and Bill Triggs All images in presentation is taken from article Presentation by Inge Edward Halsaunet Introduction What: Detect
Histogram of Oriented Gradients for Human Detection Article by Navneet Dalal and Bill Triggs All images in presentation is taken from article Presentation by Inge Edward Halsaunet Introduction What: Detect
III. VERVIEW OF THE METHODS
 An Analytical Study of SIFT and SURF in Image Registration Vivek Kumar Gupta, Kanchan Cecil Department of Electronics & Telecommunication, Jabalpur engineering college, Jabalpur, India comparing the distance
An Analytical Study of SIFT and SURF in Image Registration Vivek Kumar Gupta, Kanchan Cecil Department of Electronics & Telecommunication, Jabalpur engineering college, Jabalpur, India comparing the distance
A Novel Algorithm for Color Image matching using Wavelet-SIFT
 International Journal of Scientific and Research Publications, Volume 5, Issue 1, January 2015 1 A Novel Algorithm for Color Image matching using Wavelet-SIFT Mupuri Prasanth Babu *, P. Ravi Shankar **
International Journal of Scientific and Research Publications, Volume 5, Issue 1, January 2015 1 A Novel Algorithm for Color Image matching using Wavelet-SIFT Mupuri Prasanth Babu *, P. Ravi Shankar **
Verslag Project beeldverwerking A study of the 2D SIFT algorithm
 Faculteit Ingenieurswetenschappen 27 januari 2008 Verslag Project beeldverwerking 2007-2008 A study of the 2D SIFT algorithm Dimitri Van Cauwelaert Prof. dr. ir. W. Philips dr. ir. A. Pizurica 2 Content
Faculteit Ingenieurswetenschappen 27 januari 2008 Verslag Project beeldverwerking 2007-2008 A study of the 2D SIFT algorithm Dimitri Van Cauwelaert Prof. dr. ir. W. Philips dr. ir. A. Pizurica 2 Content
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Performance Analysis of Computationally Efficient Model based Object Detection and Recognition Techniques
 IJSTE - International Journal of Science Technology & Engineering Volume 3 Issue 01 July 2016 ISSN (online): 2349-784X Performance Analysis of Computationally Efficient Model based Object Detection and
IJSTE - International Journal of Science Technology & Engineering Volume 3 Issue 01 July 2016 ISSN (online): 2349-784X Performance Analysis of Computationally Efficient Model based Object Detection and
CS 558: Computer Vision 4 th Set of Notes
 1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
Feature descriptors and matching
 Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Requirements for region detection
 Region detectors Requirements for region detection For region detection invariance transformations that should be considered are illumination changes, translation, rotation, scale and full affine transform
Region detectors Requirements for region detection For region detection invariance transformations that should be considered are illumination changes, translation, rotation, scale and full affine transform
VK Multimedia Information Systems
 VK Multimedia Information Systems Mathias Lux, mlux@itec.uni-klu.ac.at Dienstags, 16.oo Uhr This work is licensed under the Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Agenda Evaluations
VK Multimedia Information Systems Mathias Lux, mlux@itec.uni-klu.ac.at Dienstags, 16.oo Uhr This work is licensed under the Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Agenda Evaluations
Image matching. Announcements. Harder case. Even harder case. Project 1 Out today Help session at the end of class. by Diva Sian.
 Announcements Project 1 Out today Help session at the end of class Image matching by Diva Sian by swashford Harder case Even harder case How the Afghan Girl was Identified by Her Iris Patterns Read the
Announcements Project 1 Out today Help session at the end of class Image matching by Diva Sian by swashford Harder case Even harder case How the Afghan Girl was Identified by Her Iris Patterns Read the
Obtaining Feature Correspondences
 Obtaining Feature Correspondences Neill Campbell May 9, 2008 A state-of-the-art system for finding objects in images has recently been developed by David Lowe. The algorithm is termed the Scale-Invariant
Obtaining Feature Correspondences Neill Campbell May 9, 2008 A state-of-the-art system for finding objects in images has recently been developed by David Lowe. The algorithm is termed the Scale-Invariant
School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
SURF: Speeded Up Robust Features
 SURF: Speeded Up Robust Features Herbert Bay 1, Tinne Tuytelaars 2, and Luc Van Gool 12 1 ETH Zurich {bay, vangool}@vision.ee.ethz.ch 2 Katholieke Universiteit Leuven {Tinne.Tuytelaars, Luc.Vangool}@esat.kuleuven.be
SURF: Speeded Up Robust Features Herbert Bay 1, Tinne Tuytelaars 2, and Luc Van Gool 12 1 ETH Zurich {bay, vangool}@vision.ee.ethz.ch 2 Katholieke Universiteit Leuven {Tinne.Tuytelaars, Luc.Vangool}@esat.kuleuven.be
Computer Vision I - Appearance-based Matching and Projective Geometry
 Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 01/11/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 01/11/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Fast Image Matching Using Multi-level Texture Descriptor
 Fast Image Matching Using Multi-level Texture Descriptor Hui-Fuang Ng *, Chih-Yang Lin #, and Tatenda Muindisi * Department of Computer Science, Universiti Tunku Abdul Rahman, Malaysia. E-mail: nghf@utar.edu.my
Fast Image Matching Using Multi-level Texture Descriptor Hui-Fuang Ng *, Chih-Yang Lin #, and Tatenda Muindisi * Department of Computer Science, Universiti Tunku Abdul Rahman, Malaysia. E-mail: nghf@utar.edu.my
Image Features: Detection, Description, and Matching and their Applications
 Image Features: Detection, Description, and Matching and their Applications Image Representation: Global Versus Local Features Features/ keypoints/ interset points are interesting locations in the image.
Image Features: Detection, Description, and Matching and their Applications Image Representation: Global Versus Local Features Features/ keypoints/ interset points are interesting locations in the image.
Distinctive Image Features from Scale-Invariant Keypoints
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe Computer Science Department University of British Columbia Vancouver, B.C., Canada lowe@cs.ubc.ca January 5, 2004 Abstract This paper
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe Computer Science Department University of British Columbia Vancouver, B.C., Canada lowe@cs.ubc.ca January 5, 2004 Abstract This paper
Image features. Image Features
 Image features Image features, such as edges and interest points, provide rich information on the image content. They correspond to local regions in the image and are fundamental in many applications in
Image features Image features, such as edges and interest points, provide rich information on the image content. They correspond to local regions in the image and are fundamental in many applications in
Image Segmentation and Registration
 Image Segmentation and Registration Dr. Christine Tanner (tanner@vision.ee.ethz.ch) Computer Vision Laboratory, ETH Zürich Dr. Verena Kaynig, Machine Learning Laboratory, ETH Zürich Outline Segmentation
Image Segmentation and Registration Dr. Christine Tanner (tanner@vision.ee.ethz.ch) Computer Vision Laboratory, ETH Zürich Dr. Verena Kaynig, Machine Learning Laboratory, ETH Zürich Outline Segmentation
IMAGE-GUIDED TOURS: FAST-APPROXIMATED SIFT WITH U-SURF FEATURES
 IMAGE-GUIDED TOURS: FAST-APPROXIMATED SIFT WITH U-SURF FEATURES Eric Chu, Erin Hsu, Sandy Yu Department of Electrical Engineering Stanford University {echu508, erinhsu, snowy}@stanford.edu Abstract In
IMAGE-GUIDED TOURS: FAST-APPROXIMATED SIFT WITH U-SURF FEATURES Eric Chu, Erin Hsu, Sandy Yu Department of Electrical Engineering Stanford University {echu508, erinhsu, snowy}@stanford.edu Abstract In
CS 378: Autonomous Intelligent Robotics. Instructor: Jivko Sinapov
 CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Visual Registration and Recognition Announcements Homework 6 is out, due 4/5 4/7 Installing
CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Visual Registration and Recognition Announcements Homework 6 is out, due 4/5 4/7 Installing
Image Matching. AKA: Image registration, the correspondence problem, Tracking,
 Image Matching AKA: Image registration, the correspondence problem, Tracking, What Corresponds to What? Daisy? Daisy From: www.amphian.com Relevant for Analysis of Image Pairs (or more) Also Relevant for
Image Matching AKA: Image registration, the correspondence problem, Tracking, What Corresponds to What? Daisy? Daisy From: www.amphian.com Relevant for Analysis of Image Pairs (or more) Also Relevant for
Prof. Feng Liu. Spring /26/2017
 Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/26/2017 Last Time Re-lighting HDR 2 Today Panorama Overview Feature detection Mid-term project presentation Not real mid-term 6
Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/26/2017 Last Time Re-lighting HDR 2 Today Panorama Overview Feature detection Mid-term project presentation Not real mid-term 6
Image key points detection and matching
 Image key points detection and matching Mikhail V. Medvedev Technical Cybernetics and Computer Science Department Kazan National Research Technical University Kazan, Russia mmedv@mail.ru Mikhail P. Shleymovich
Image key points detection and matching Mikhail V. Medvedev Technical Cybernetics and Computer Science Department Kazan National Research Technical University Kazan, Russia mmedv@mail.ru Mikhail P. Shleymovich
Local features: detection and description May 12 th, 2015
 Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Patch Descriptors. CSE 455 Linda Shapiro
 Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors. EE/CSE 576 Linda Shapiro
 Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
FESID: Finite Element Scale Invariant Detector
 : Finite Element Scale Invariant Detector Dermot Kerr 1,SonyaColeman 1, and Bryan Scotney 2 1 School of Computing and Intelligent Systems, University of Ulster, Magee, BT48 7JL, Northern Ireland 2 School
: Finite Element Scale Invariant Detector Dermot Kerr 1,SonyaColeman 1, and Bryan Scotney 2 1 School of Computing and Intelligent Systems, University of Ulster, Magee, BT48 7JL, Northern Ireland 2 School
Distinctive Image Features from Scale-Invariant Keypoints
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe Computer Science Department University of British Columbia Vancouver, B.C., Canada Draft: Submitted for publication. This version:
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe Computer Science Department University of British Columbia Vancouver, B.C., Canada Draft: Submitted for publication. This version:
Features Points. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so