3D Shape and Indirect Appearance By Structured Light Transport
|
|
|
- Rosaline Marshall
- 6 years ago
- Views:
Transcription
1 3D Shape and Indirect Appearance By Structured Light Transport CVPR Best paper honorable mention Matthew O Toole, John Mather, Kiriakos N. Kutulakos Department of Computer Science University of Toronto By FU, Kangping Credits: K. Kutulakos, TI TM, J. Geng

2 Structured-light 3D surface imaging Projecting a narrow band of light onto a 3D shaped surface produces a line of illumination that appears distorted from other perspectives than that of the projector, and can be used for an exact geometric reconstruction of the surface shape.

3 Light Transport - Indirect light Common assumption in CV: Light travels along direct paths; Lights in natural scenes Light reflects and refracts; Undergoes specular and diffuse inter-reflections;
4 Light Transport - Indirect light Two families of transport paths dominate image formation in a projector-camera systems Epipolar paths; Non-epipolar paths; Contributions of these paths are hard to separate in images; Easy to untangle in the optical domain before acquisition takes place;
5 Experimental Results
6 Contributions A novel technique Structured Light Transport Define and address four imaging problems: One-shot indirect-only imaging; One-shot indirect-invariant imaging; Given any desired illumination, capture an image where light appears to have been transported by direct paths only; Two-shot direct-only imaging; One-shot multi-pattern imaging; Any N desired illuminations;
7 Contributions A physical device that just outputs live video A novel combination of existing off-the-shelf components; A conventional 28Hz video camera; A pair of synchronized digital micro-mirror devices (DMDs) operating at 2.7kHz to 24kHz; Optics for coupling them;
8 Contributions The first demonstration of an indirect-only video camera ; Shows how to capture views of a scene that are invariant to indirect light with just one SLT shot; Shows that any ensemble of structured-light patterns can be made robust to indirect light; Shows that SLT imaging can turn any multipattern 3D structured-light method into a oneshot technique for dynamic shape capture;
9 The Stereo Transport Matrix Light transport equation The camera and projector respond linearly to light; i: image, column vector; p: the P-pixel projected pattern, column vector T: I P instantaneous light transport matrix; T[i,p]: total radiance transported from projector pixel p to image pixel I over all possible paths; NG, R., etc. All-frequency shadows using non-linear wavelet lighting approximation. SIGGRAPH 2003

10 The Stereo Transport Matrix A projector and a camera define a stereo pair Classify elements of T into: Epipolar elements Non-epipolar elements Direct elements

11 The Stereo Transport Matrix
12 Dominance of Non-Epipolar Transport Non-epipolar dominance assumption: The non-epipolar component is very largely relative to the epipolar indirect for a broad range of scenes; Theoretically and experimentally supported.
13 Imaging by SLT Primal-dual coding Primal-dual coding primal-dual coding acquires photos governed by the above transport probing equation; l: a column vector of all ones; denotes the element-wise multiplication of two equal-sized matrices; Conventional photography: M DoF for controlling the output photo; The probing matrix: N M. M O Toole, etc. Primal-Dual Coding to Probe Light Transport. SIGGRAPH 2012
14 Imaging by SLT Primal-dual coding How to set π? How to design an imaging system that implements the equation? The key ingredient is an ability to simultaneously modulate light at its source (the projector) and its destination (the sensor). M O Toole, etc. Primal-Dual Coding to Probe Light Transport. SIGGRAPH 2012
15 Imaging by SLT Primal-dual coding How to determine m and q for a given π? Stochastic estimators for general probing; Optical probing: Opening the camera s shutter; Project pattern q(t) onto the scene; Use a semi-transparent pixel mask m(t) to modulate the light arriving at individual camera pixels; Close the shutter. M O Toole, etc. Primal-Dual Coding to Probe Light Transport. SIGGRAPH 2012
16 Imaging by SLT Primal-dual coding Prototype: To acquire a primal-dual coded photo, we project a sequence of illumination patterns onto the scene and simultaneously display a sequence of modulation patterns on the LCD panel; The camera s shutter remains open throughout this process. M O Toole, etc. Primal-Dual Coding to Probe Light Transport. SIGGRAPH 2012
17 Dominance of Non-Epipolar Transport Classify elements of T into: Epipolar elements Non-epipolar elements Direct elements Non-epipolar dominance assumption
 be vinary vectors of size I indicating the pixel membership")
18 Imaging by Structured Light Transport Conventional structured-light imaging - π 1 Non-epipolar blocks are dependent on patterns; Indirect-invariant imaging - π 2 Indirect-only imaging - π 3 Epipolar-only imaging - π 4 One-show, multi-pattern, indirectinvariant imaging - π 5 Partition the I image pixels into S sets and let b(i) be vinary vectors of size I indicating the pixel membership of each set. S sub-images, each of which is a view of the scene under a specific structured-light pattern in the sequence.

19 Live Structured-Light-Transport Imaging - DMD Digital micro-mirror device Microscopic mirrors, corresponding to pixels; Mirrors rotatable ±10-12 ; Toggled on: bright; Toggled off: dark; Toggled on and off quickly: grayscale;

20 Live Structured-Light-Transport Imaging LCD vs DMD LCDs are not suitable for video-rate probing: they refresh at Hz; DMD: kHz; Problem: DMDs are binary Turn the derivation of masks and projection patterns into a combinatorial optimization problem. Approach: Derive randomized decompositions of π that approximate Eq.(right) in expectation.
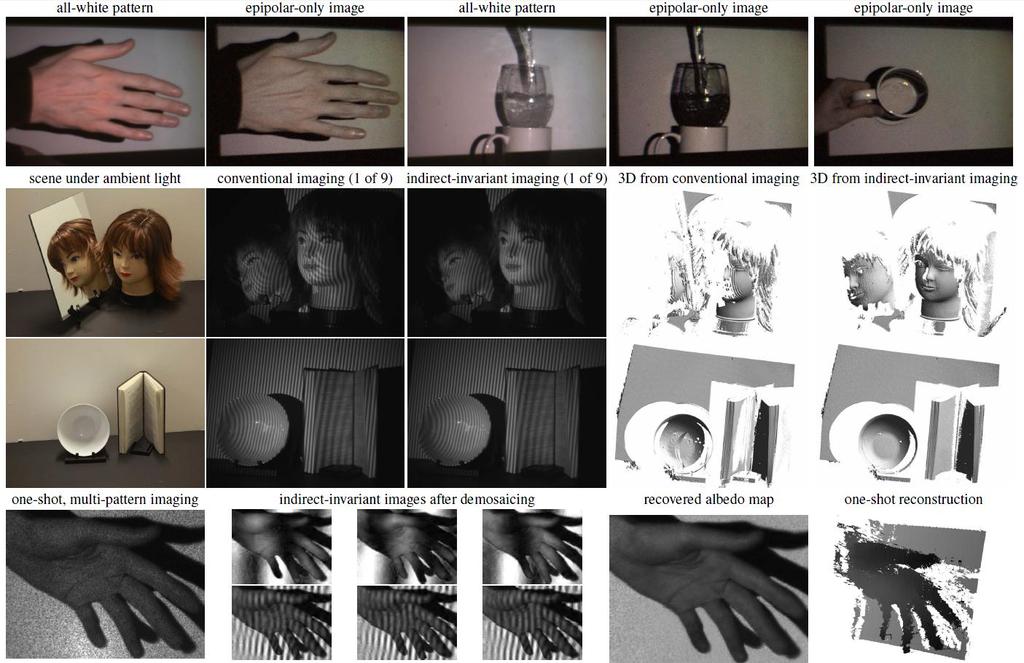
21 Experimental Results
22 Concluding Remarks SLT imaging offers a powerful new way to analyze the appearance of complex scenes and to boost the abilities of existing reconstruction algorithms.
3D Shape and Indirect Appearance By Structured Light Transport. Authors: O Toole, Mather, and Kutulakos Presented by: Harrison Billmers, Allen Hawkes
 3D Shape and Indirect Appearance By Structured Light Transport Authors: O Toole, Mather, and Kutulakos Presented by: Harrison Billmers, Allen Hawkes Background - Indirect Light - Indirect light can be
3D Shape and Indirect Appearance By Structured Light Transport Authors: O Toole, Mather, and Kutulakos Presented by: Harrison Billmers, Allen Hawkes Background - Indirect Light - Indirect light can be
Light transport matrices
 Light transport matrices http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 18 Course announcements Homework 5 has been posted. - Due on Friday
Light transport matrices http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 18 Course announcements Homework 5 has been posted. - Due on Friday
Computational light transport
 Computational light transport http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 19 Course announcements Homework 5 has been posted. - Due on
Computational light transport http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 19 Course announcements Homework 5 has been posted. - Due on
More computational light transport
 More computational light transport http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 23 Course announcements Sign-up for final project checkpoint
More computational light transport http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 23 Course announcements Sign-up for final project checkpoint
Light Transport CS434. Daniel G. Aliaga Department of Computer Science Purdue University
 Light Transport CS434 Daniel G. Aliaga Department of Computer Science Purdue University Topics Local and Global Illumination Models Helmholtz Reciprocity Dual Photography/Light Transport (in Real-World)
Light Transport CS434 Daniel G. Aliaga Department of Computer Science Purdue University Topics Local and Global Illumination Models Helmholtz Reciprocity Dual Photography/Light Transport (in Real-World)
Stereo and structured light
 Stereo and structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 20 Course announcements Homework 5 is still ongoing. - Make sure
Stereo and structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 20 Course announcements Homework 5 is still ongoing. - Make sure
Global Illumination. COMP 575/770 Spring 2013
 Global Illumination COMP 575/770 Spring 2013 Final Exam and Projects COMP 575 Final Exam Friday, May 3 4:00 pm COMP 770 (and 575 extra credit) Projects Final report due by end of day, May 1 Presentations:
Global Illumination COMP 575/770 Spring 2013 Final Exam and Projects COMP 575 Final Exam Friday, May 3 4:00 pm COMP 770 (and 575 extra credit) Projects Final report due by end of day, May 1 Presentations:
CONTENTS. High-Accuracy Stereo Depth Maps Using Structured Light. Yeojin Yoon
 [Paper Seminar 7] CVPR2003, Vol.1, pp.195-202 High-Accuracy Stereo Depth Maps Using Structured Light Daniel Scharstein Middlebury College Richard Szeliski Microsoft Research 2012. 05. 30. Yeojin Yoon Introduction
[Paper Seminar 7] CVPR2003, Vol.1, pp.195-202 High-Accuracy Stereo Depth Maps Using Structured Light Daniel Scharstein Middlebury College Richard Szeliski Microsoft Research 2012. 05. 30. Yeojin Yoon Introduction
Integrated three-dimensional reconstruction using reflectance fields
 www.ijcsi.org 32 Integrated three-dimensional reconstruction using reflectance fields Maria-Luisa Rosas 1 and Miguel-Octavio Arias 2 1,2 Computer Science Department, National Institute of Astrophysics,
www.ijcsi.org 32 Integrated three-dimensional reconstruction using reflectance fields Maria-Luisa Rosas 1 and Miguel-Octavio Arias 2 1,2 Computer Science Department, National Institute of Astrophysics,
Rendering Synthetic Objects into Real Scenes. based on [Debevec98]
![Rendering Synthetic Objects into Real Scenes. based on [Debevec98]](/thumbs/94/121105342.jpg "Rendering Synthetic Objects into Real Scenes. based on [Debevec98]") Rendering Synthetic Objects into Real Scenes based on [Debevec98] Compositing of synthetic objects Geometry consistency needed: geometric model of synthetic objects needed: (coarse) geometric model of
Rendering Synthetic Objects into Real Scenes based on [Debevec98] Compositing of synthetic objects Geometry consistency needed: geometric model of synthetic objects needed: (coarse) geometric model of
Epipolar Geometry in Stereo, Motion and Object Recognition
 Epipolar Geometry in Stereo, Motion and Object Recognition A Unified Approach by GangXu Department of Computer Science, Ritsumeikan University, Kusatsu, Japan and Zhengyou Zhang INRIA Sophia-Antipolis,
Epipolar Geometry in Stereo, Motion and Object Recognition A Unified Approach by GangXu Department of Computer Science, Ritsumeikan University, Kusatsu, Japan and Zhengyou Zhang INRIA Sophia-Antipolis,
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Other approaches to obtaining 3D structure
 Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Computational Cameras: Exploiting Spatial- Angular Temporal Tradeoffs in Photography
 Mitsubishi Electric Research Labs (MERL) Computational Cameras Computational Cameras: Exploiting Spatial- Angular Temporal Tradeoffs in Photography Amit Agrawal Mitsubishi Electric Research Labs (MERL)
Mitsubishi Electric Research Labs (MERL) Computational Cameras Computational Cameras: Exploiting Spatial- Angular Temporal Tradeoffs in Photography Amit Agrawal Mitsubishi Electric Research Labs (MERL)
Today. Stereo (two view) reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography
 reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography") Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Flexible Calibration of a Portable Structured Light System through Surface Plane
 Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Lecture 22: Basic Image Formation CAP 5415
 Lecture 22: Basic Image Formation CAP 5415 Today We've talked about the geometry of scenes and how that affects the image We haven't talked about light yet Today, we will talk about image formation and
Lecture 22: Basic Image Formation CAP 5415 Today We've talked about the geometry of scenes and how that affects the image We haven't talked about light yet Today, we will talk about image formation and
Other Reconstruction Techniques
 Other Reconstruction Techniques Ruigang Yang CS 684 CS 684 Spring 2004 1 Taxonomy of Range Sensing From Brain Curless, SIGGRAPH 00 Lecture notes CS 684 Spring 2004 2 Taxonomy of Range Scanning (cont.)
Other Reconstruction Techniques Ruigang Yang CS 684 CS 684 Spring 2004 1 Taxonomy of Range Sensing From Brain Curless, SIGGRAPH 00 Lecture notes CS 684 Spring 2004 2 Taxonomy of Range Scanning (cont.)
Three-Dimensional Sensors Lecture 2: Projected-Light Depth Cameras
 Three-Dimensional Sensors Lecture 2: Projected-Light Depth Cameras Radu Horaud INRIA Grenoble Rhone-Alpes, France Radu.Horaud@inria.fr http://perception.inrialpes.fr/ Outline The geometry of active stereo.
Three-Dimensional Sensors Lecture 2: Projected-Light Depth Cameras Radu Horaud INRIA Grenoble Rhone-Alpes, France Radu.Horaud@inria.fr http://perception.inrialpes.fr/ Outline The geometry of active stereo.
Computational Imaging for Self-Driving Vehicles
 CVPR 2018 Computational Imaging for Self-Driving Vehicles Jan Kautz--------Ramesh Raskar--------Achuta Kadambi--------Guy Satat Computational Imaging for Self-Driving Vehicles Jan Kautz--------Ramesh Raskar--------Achuta
CVPR 2018 Computational Imaging for Self-Driving Vehicles Jan Kautz--------Ramesh Raskar--------Achuta Kadambi--------Guy Satat Computational Imaging for Self-Driving Vehicles Jan Kautz--------Ramesh Raskar--------Achuta
Structured light , , Computational Photography Fall 2017, Lecture 27
 Structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 27 Course announcements Homework 5 has been graded. - Mean: 129. - Median:
Structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 27 Course announcements Homework 5 has been graded. - Mean: 129. - Median:
SAMPLING AND NOISE. Increasing the number of samples per pixel gives an anti-aliased image which better represents the actual scene.
 SAMPLING AND NOISE When generating an image, Mantra must determine a color value for each pixel by examining the scene behind the image plane. Mantra achieves this by sending out a number of rays from
SAMPLING AND NOISE When generating an image, Mantra must determine a color value for each pixel by examining the scene behind the image plane. Mantra achieves this by sending out a number of rays from
Epipolar geometry contd.
 Epipolar geometry contd. Estimating F 8-point algorithm The fundamental matrix F is defined by x' T Fx = 0 for any pair of matches x and x in two images. Let x=(u,v,1) T and x =(u,v,1) T, each match gives
Epipolar geometry contd. Estimating F 8-point algorithm The fundamental matrix F is defined by x' T Fx = 0 for any pair of matches x and x in two images. Let x=(u,v,1) T and x =(u,v,1) T, each match gives
Illumination Algorithms
 Global Illumination Illumination Algorithms Digital Lighting and Rendering CGT 340 The goal of global illumination is to model all possible paths of light to the camera. Global Illumination Global illumination
Global Illumination Illumination Algorithms Digital Lighting and Rendering CGT 340 The goal of global illumination is to model all possible paths of light to the camera. Global Illumination Global illumination
Jinwei Ye. Research Interests. Education. Research Experience. Phone: (302) Homepage:
 Homepage:") Jinwei Ye Ph.D. University of Delaware Newark, DE 19716 Phone: (302) 562-9234 Email: jinweiye@udel.edu Homepage: http://www.eecis.udel.edu/ jye Research Interests Computer Vision Computational Photography
Jinwei Ye Ph.D. University of Delaware Newark, DE 19716 Phone: (302) 562-9234 Email: jinweiye@udel.edu Homepage: http://www.eecis.udel.edu/ jye Research Interests Computer Vision Computational Photography
GAMES Webinar: Rendering Tutorial 2. Monte Carlo Methods. Shuang Zhao
 GAMES Webinar: Rendering Tutorial 2 Monte Carlo Methods Shuang Zhao Assistant Professor Computer Science Department University of California, Irvine GAMES Webinar Shuang Zhao 1 Outline 1. Monte Carlo integration
GAMES Webinar: Rendering Tutorial 2 Monte Carlo Methods Shuang Zhao Assistant Professor Computer Science Department University of California, Irvine GAMES Webinar Shuang Zhao 1 Outline 1. Monte Carlo integration
3D object recognition used by team robotto
 3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
3D Modeling using multiple images Exam January 2008
 3D Modeling using multiple images Exam January 2008 All documents are allowed. Answers should be justified. The different sections below are independant. 1 3D Reconstruction A Robust Approche Consider
3D Modeling using multiple images Exam January 2008 All documents are allowed. Answers should be justified. The different sections below are independant. 1 3D Reconstruction A Robust Approche Consider
Image Formation. Antonino Furnari. Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania
 Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
Transparent Object Shape Measurement Based on Deflectometry
 Proceedings Transparent Object Shape Measurement Based on Deflectometry Zhichao Hao and Yuankun Liu * Opto-Electronics Department, Sichuan University, Chengdu 610065, China; 2016222055148@stu.scu.edu.cn
Proceedings Transparent Object Shape Measurement Based on Deflectometry Zhichao Hao and Yuankun Liu * Opto-Electronics Department, Sichuan University, Chengdu 610065, China; 2016222055148@stu.scu.edu.cn
Inverse Light Transport (and next Separation of Global and Direct Illumination)
") Inverse ight Transport (and next Separation of Global and Direct Illumination) CS434 Daniel G. Aliaga Department of Computer Science Purdue University Inverse ight Transport ight Transport Model transfer
Inverse ight Transport (and next Separation of Global and Direct Illumination) CS434 Daniel G. Aliaga Department of Computer Science Purdue University Inverse ight Transport ight Transport Model transfer
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection
 Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection Svorad Štolc et al. svorad.stolc@ait.ac.at AIT Austrian Institute of Technology GmbH Center
Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection Svorad Štolc et al. svorad.stolc@ait.ac.at AIT Austrian Institute of Technology GmbH Center
CS635 Spring Department of Computer Science Purdue University
 Light Transport CS635 Spring 2010 Daniel G Aliaga Daniel G. Aliaga Department of Computer Science Purdue University Topics Local and GlobalIllumination Models Helmholtz Reciprocity Dual Photography/Light
Light Transport CS635 Spring 2010 Daniel G Aliaga Daniel G. Aliaga Department of Computer Science Purdue University Topics Local and GlobalIllumination Models Helmholtz Reciprocity Dual Photography/Light
CHAPTER 9. Classification Scheme Using Modified Photometric. Stereo and 2D Spectra Comparison
 CHAPTER 9 Classification Scheme Using Modified Photometric Stereo and 2D Spectra Comparison 9.1. Introduction In Chapter 8, even we combine more feature spaces and more feature generators, we note that
CHAPTER 9 Classification Scheme Using Modified Photometric Stereo and 2D Spectra Comparison 9.1. Introduction In Chapter 8, even we combine more feature spaces and more feature generators, we note that
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
The end of affine cameras
 The end of affine cameras Affine SFM revisited Epipolar geometry Two-view structure from motion Multi-view structure from motion Planches : http://www.di.ens.fr/~ponce/geomvis/lect3.pptx http://www.di.ens.fr/~ponce/geomvis/lect3.pdf
The end of affine cameras Affine SFM revisited Epipolar geometry Two-view structure from motion Multi-view structure from motion Planches : http://www.di.ens.fr/~ponce/geomvis/lect3.pptx http://www.di.ens.fr/~ponce/geomvis/lect3.pdf
Computer Vision. The image formation process
 Computer Vision The image formation process Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 The image
Computer Vision The image formation process Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 The image
The Rendering Equation & Monte Carlo Ray Tracing
 Last Time? Local Illumination & Monte Carlo Ray Tracing BRDF Ideal Diffuse Reflectance Ideal Specular Reflectance The Phong Model Radiosity Equation/Matrix Calculating the Form Factors Aj Ai Reading for
Last Time? Local Illumination & Monte Carlo Ray Tracing BRDF Ideal Diffuse Reflectance Ideal Specular Reflectance The Phong Model Radiosity Equation/Matrix Calculating the Form Factors Aj Ai Reading for
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Multiple Views Geometry
 Multiple Views Geometry Subhashis Banerjee Dept. Computer Science and Engineering IIT Delhi email: suban@cse.iitd.ac.in January 2, 28 Epipolar geometry Fundamental geometric relationship between two perspective
Multiple Views Geometry Subhashis Banerjee Dept. Computer Science and Engineering IIT Delhi email: suban@cse.iitd.ac.in January 2, 28 Epipolar geometry Fundamental geometric relationship between two perspective
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Radiometric Compensation using Stratified Inverses
 Radiometric Compensation using Stratified Inverses Tian-Tsong Ng, Ramanpreet S. Pahwa, Jiamin Bai, Tony Q.S. Quek Institute for Infocomm Research Singapore {ttng,rspahwa,jbai,qsquek}@i2r.a-star.edu.sg
Radiometric Compensation using Stratified Inverses Tian-Tsong Ng, Ramanpreet S. Pahwa, Jiamin Bai, Tony Q.S. Quek Institute for Infocomm Research Singapore {ttng,rspahwa,jbai,qsquek}@i2r.a-star.edu.sg
Depth. Common Classification Tasks. Example: AlexNet. Another Example: Inception. Another Example: Inception. Depth
 Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Image Based Lighting with Near Light Sources
 Image Based Lighting with Near Light Sources Shiho Furuya, Takayuki Itoh Graduate School of Humanitics and Sciences, Ochanomizu University E-mail: {shiho, itot}@itolab.is.ocha.ac.jp Abstract Recent some
Image Based Lighting with Near Light Sources Shiho Furuya, Takayuki Itoh Graduate School of Humanitics and Sciences, Ochanomizu University E-mail: {shiho, itot}@itolab.is.ocha.ac.jp Abstract Recent some
Image Based Lighting with Near Light Sources
 Image Based Lighting with Near Light Sources Shiho Furuya, Takayuki Itoh Graduate School of Humanitics and Sciences, Ochanomizu University E-mail: {shiho, itot}@itolab.is.ocha.ac.jp Abstract Recent some
Image Based Lighting with Near Light Sources Shiho Furuya, Takayuki Itoh Graduate School of Humanitics and Sciences, Ochanomizu University E-mail: {shiho, itot}@itolab.is.ocha.ac.jp Abstract Recent some
High Speed Digital Microscope
 High Speed Digital Microscope Product datasheet Page Description 2 Benefits 3 System Specifications 3 IP License 4 High Speed Digital Microscope datasheet Page 1 of 5 Part No. Part Description # 3200531
High Speed Digital Microscope Product datasheet Page Description 2 Benefits 3 System Specifications 3 IP License 4 High Speed Digital Microscope datasheet Page 1 of 5 Part No. Part Description # 3200531
Lecture 17: Recursive Ray Tracing. Where is the way where light dwelleth? Job 38:19
 Lecture 17: Recursive Ray Tracing Where is the way where light dwelleth? Job 38:19 1. Raster Graphics Typical graphics terminals today are raster displays. A raster display renders a picture scan line
Lecture 17: Recursive Ray Tracing Where is the way where light dwelleth? Job 38:19 1. Raster Graphics Typical graphics terminals today are raster displays. A raster display renders a picture scan line
Image-based Lighting
 Image-based Lighting 10/17/15 T2 Computational Photography Derek Hoiem, University of Illinois Many slides from Debevec, some from Efros Next week Derek away for ICCV (Venice) Zhizhong and Aditya will
Image-based Lighting 10/17/15 T2 Computational Photography Derek Hoiem, University of Illinois Many slides from Debevec, some from Efros Next week Derek away for ICCV (Venice) Zhizhong and Aditya will
Epipolar Geometry CSE P576. Dr. Matthew Brown
 Epipolar Geometry CSE P576 Dr. Matthew Brown Epipolar Geometry Epipolar Lines, Plane Constraint Fundamental Matrix, Linear solution + RANSAC Applications: Structure from Motion, Stereo [ Szeliski 11] 2
Epipolar Geometry CSE P576 Dr. Matthew Brown Epipolar Geometry Epipolar Lines, Plane Constraint Fundamental Matrix, Linear solution + RANSAC Applications: Structure from Motion, Stereo [ Szeliski 11] 2
Lecture 9 & 10: Stereo Vision
 Lecture 9 & 10: Stereo Vision Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? IntroducEon to stereo vision Epipolar geometry: a gentle intro Parallel images Image receficaeon Solving
Lecture 9 & 10: Stereo Vision Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? IntroducEon to stereo vision Epipolar geometry: a gentle intro Parallel images Image receficaeon Solving
Global Illumination. CSCI 420 Computer Graphics Lecture 18. BRDFs Raytracing and Radiosity Subsurface Scattering Photon Mapping [Ch
 CSCI 420 Computer Graphics Lecture 18 Global Illumination Jernej Barbic University of Southern California BRDFs Raytracing and Radiosity Subsurface Scattering Photon Mapping [Ch. 13.4-13.5] 1 Global Illumination
CSCI 420 Computer Graphics Lecture 18 Global Illumination Jernej Barbic University of Southern California BRDFs Raytracing and Radiosity Subsurface Scattering Photon Mapping [Ch. 13.4-13.5] 1 Global Illumination
Lecture 19: Depth Cameras. Visual Computing Systems CMU , Fall 2013
 Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
The main problem of photogrammetry
 Structured Light Structured Light The main problem of photogrammetry to recover shape from multiple views of a scene, we need to find correspondences between the images the matching/correspondence problem
Structured Light Structured Light The main problem of photogrammetry to recover shape from multiple views of a scene, we need to find correspondences between the images the matching/correspondence problem
Final Project: Real-Time Global Illumination with Radiance Regression Functions
 Volume xx (200y), Number z, pp. 1 5 Final Project: Real-Time Global Illumination with Radiance Regression Functions Fu-Jun Luan Abstract This is a report for machine learning final project, which combines
Volume xx (200y), Number z, pp. 1 5 Final Project: Real-Time Global Illumination with Radiance Regression Functions Fu-Jun Luan Abstract This is a report for machine learning final project, which combines
An Innovative Three-dimensional Profilometer for Surface Profile Measurement Using Digital Fringe Projection and Phase Shifting
 An Innovative Three-dimensional Profilometer for Surface Profile Measurement Using Digital Fringe Projection and Phase Shifting Liang-Chia Chen 1, Shien-Han Tsai 1 and Kuang-Chao Fan 2 1 Institute of Automation
An Innovative Three-dimensional Profilometer for Surface Profile Measurement Using Digital Fringe Projection and Phase Shifting Liang-Chia Chen 1, Shien-Han Tsai 1 and Kuang-Chao Fan 2 1 Institute of Automation
Range Sensors (time of flight) (1)
 (1)") Range Sensors (time of flight) (1) Large range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic sensors, infra-red sensors
Range Sensors (time of flight) (1) Large range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic sensors, infra-red sensors
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
A Theory of Multi-Layer Flat Refractive Geometry
 A Theory of Multi-Layer Flat Refractive Geometry Axis Amit Agrawal Srikumar Ramalingam Yuichi Taguchi Visesh Chari Mitsubishi Electric Research Labs (MERL) INRIA Imaging with Refractions Source: Shortis
A Theory of Multi-Layer Flat Refractive Geometry Axis Amit Agrawal Srikumar Ramalingam Yuichi Taguchi Visesh Chari Mitsubishi Electric Research Labs (MERL) INRIA Imaging with Refractions Source: Shortis
specular diffuse reflection.
 Lesson 8 Light and Optics The Nature of Light Properties of Light: Reflection Refraction Interference Diffraction Polarization Dispersion and Prisms Total Internal Reflection Huygens s Principle The Nature
Lesson 8 Light and Optics The Nature of Light Properties of Light: Reflection Refraction Interference Diffraction Polarization Dispersion and Prisms Total Internal Reflection Huygens s Principle The Nature
CS635 Spring Department of Computer Science Purdue University
 Inverse Light Transport CS635 Spring 200 Daniel G Aliaga Daniel G. Aliaga Department of Computer Science Purdue University Inverse Light Transport Light Transport Model transfer of light from source (e.g.,
Inverse Light Transport CS635 Spring 200 Daniel G Aliaga Daniel G. Aliaga Department of Computer Science Purdue University Inverse Light Transport Light Transport Model transfer of light from source (e.g.,
L2 Data Acquisition. Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods
 Structured light Range images Shape from shading Other methods") L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
Radiometry and reflectance
 Radiometry and reflectance http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 16 Course announcements Homework 4 is still ongoing - Any questions?
Radiometry and reflectance http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 16 Course announcements Homework 4 is still ongoing - Any questions?
Coding and Modulation in Cameras
 Mitsubishi Electric Research Laboratories Raskar 2007 Coding and Modulation in Cameras Ramesh Raskar with Ashok Veeraraghavan, Amit Agrawal, Jack Tumblin, Ankit Mohan Mitsubishi Electric Research Labs
Mitsubishi Electric Research Laboratories Raskar 2007 Coding and Modulation in Cameras Ramesh Raskar with Ashok Veeraraghavan, Amit Agrawal, Jack Tumblin, Ankit Mohan Mitsubishi Electric Research Labs
Global Illumination. Global Illumination. Direct Illumination vs. Global Illumination. Indirect Illumination. Soft Shadows.
 CSCI 420 Computer Graphics Lecture 18 Global Illumination Jernej Barbic University of Southern California BRDFs Raytracing and Radiosity Subsurface Scattering Photon Mapping [Angel Ch. 11] 1 Global Illumination
CSCI 420 Computer Graphics Lecture 18 Global Illumination Jernej Barbic University of Southern California BRDFs Raytracing and Radiosity Subsurface Scattering Photon Mapping [Angel Ch. 11] 1 Global Illumination
Physics-based Vision: an Introduction
 Physics-based Vision: an Introduction Robby Tan ANU/NICTA (Vision Science, Technology and Applications) PhD from The University of Tokyo, 2004 1 What is Physics-based? An approach that is principally concerned
Physics-based Vision: an Introduction Robby Tan ANU/NICTA (Vision Science, Technology and Applications) PhD from The University of Tokyo, 2004 1 What is Physics-based? An approach that is principally concerned
Perspective Projection [2 pts]
![Perspective Projection [2 pts]](/thumbs/77/75160998.jpg "Perspective Projection [2 pts]") Instructions: CSE252a Computer Vision Assignment 1 Instructor: Ben Ochoa Due: Thursday, October 23, 11:59 PM Submit your assignment electronically by email to iskwak+252a@cs.ucsd.edu with the subject line
Instructions: CSE252a Computer Vision Assignment 1 Instructor: Ben Ochoa Due: Thursday, October 23, 11:59 PM Submit your assignment electronically by email to iskwak+252a@cs.ucsd.edu with the subject line
Introduction to Computer Vision. Week 8, Fall 2010 Instructor: Prof. Ko Nishino
 Introduction to Computer Vision Week 8, Fall 2010 Instructor: Prof. Ko Nishino Midterm Project 2 without radial distortion correction with radial distortion correction Light Light Light! How do you recover
Introduction to Computer Vision Week 8, Fall 2010 Instructor: Prof. Ko Nishino Midterm Project 2 without radial distortion correction with radial distortion correction Light Light Light! How do you recover
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
3D Computer Vision 1
 3D Computer Vision 1 Multiview Stereo Multiview Stereo Multiview Stereo https://www.youtube.com/watch?v=ugkb7itpnae Shape from silhouette Shape from silhouette Shape from silhouette Shape from silhouette
3D Computer Vision 1 Multiview Stereo Multiview Stereo Multiview Stereo https://www.youtube.com/watch?v=ugkb7itpnae Shape from silhouette Shape from silhouette Shape from silhouette Shape from silhouette
Radiance. Pixels measure radiance. This pixel Measures radiance along this ray
 Photometric stereo Radiance Pixels measure radiance This pixel Measures radiance along this ray Where do the rays come from? Rays from the light source reflect off a surface and reach camera Reflection:
Photometric stereo Radiance Pixels measure radiance This pixel Measures radiance along this ray Where do the rays come from? Rays from the light source reflect off a surface and reach camera Reflection:
Il colore: acquisizione e visualizzazione. Lezione 17: 11 Maggio 2012
 Il colore: acquisizione e visualizzazione Lezione 17: 11 Maggio 2012 The importance of color information Precision vs. Perception 3D scanned geometry Photo Color and appearance Pure geometry Pure color
Il colore: acquisizione e visualizzazione Lezione 17: 11 Maggio 2012 The importance of color information Precision vs. Perception 3D scanned geometry Photo Color and appearance Pure geometry Pure color
Announcements. Written Assignment 2 out (due March 8) Computer Graphics
 Computer Graphics") Announcements Written Assignment 2 out (due March 8) 1 Advanced Ray Tracing (Recursive) Ray Tracing Antialiasing Motion Blur Distribution Ray Tracing Ray Tracing and Radiosity Assumptions Simple shading
Announcements Written Assignment 2 out (due March 8) 1 Advanced Ray Tracing (Recursive) Ray Tracing Antialiasing Motion Blur Distribution Ray Tracing Ray Tracing and Radiosity Assumptions Simple shading
Partial Calibration and Mirror Shape Recovery for Non-Central Catadioptric Systems
 Partial Calibration and Mirror Shape Recovery for Non-Central Catadioptric Systems Abstract In this paper we present a method for mirror shape recovery and partial calibration for non-central catadioptric
Partial Calibration and Mirror Shape Recovery for Non-Central Catadioptric Systems Abstract In this paper we present a method for mirror shape recovery and partial calibration for non-central catadioptric
Global Illumination. Global Illumination. Direct Illumination vs. Global Illumination. Indirect Illumination. Soft Shadows.
 CSCI 480 Computer Graphics Lecture 18 Global Illumination BRDFs Raytracing and Radiosity Subsurface Scattering Photon Mapping [Ch. 13.4-13.5] March 28, 2012 Jernej Barbic University of Southern California
CSCI 480 Computer Graphics Lecture 18 Global Illumination BRDFs Raytracing and Radiosity Subsurface Scattering Photon Mapping [Ch. 13.4-13.5] March 28, 2012 Jernej Barbic University of Southern California
Computer Graphics. Lecture 10. Global Illumination 1: Ray Tracing and Radiosity. Taku Komura 12/03/15
 Computer Graphics Lecture 10 Global Illumination 1: Ray Tracing and Radiosity Taku Komura 1 Rendering techniques Can be classified as Local Illumination techniques Global Illumination techniques Local
Computer Graphics Lecture 10 Global Illumination 1: Ray Tracing and Radiosity Taku Komura 1 Rendering techniques Can be classified as Local Illumination techniques Global Illumination techniques Local
Capturing light. Source: A. Efros
 Capturing light Source: A. Efros Review Pinhole projection models What are vanishing points and vanishing lines? What is orthographic projection? How can we approximate orthographic projection? Lenses
Capturing light Source: A. Efros Review Pinhole projection models What are vanishing points and vanishing lines? What is orthographic projection? How can we approximate orthographic projection? Lenses
Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies
 Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies M. Lourakis, S. Tzurbakis, A. Argyros, S. Orphanoudakis Computer Vision and Robotics Lab (CVRL) Institute of
Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies M. Lourakis, S. Tzurbakis, A. Argyros, S. Orphanoudakis Computer Vision and Robotics Lab (CVRL) Institute of
Image Formation: Light and Shading. Introduction to Computer Vision CSE 152 Lecture 3
 Image Formation: Light and Shading CSE 152 Lecture 3 Announcements Homework 1 is due Apr 11, 11:59 PM Homework 2 will be assigned on Apr 11 Reading: Chapter 2: Light and Shading Geometric image formation
Image Formation: Light and Shading CSE 152 Lecture 3 Announcements Homework 1 is due Apr 11, 11:59 PM Homework 2 will be assigned on Apr 11 Reading: Chapter 2: Light and Shading Geometric image formation
3DPIXA: options and challenges with wirebond inspection. Whitepaper
 3DPIXA: options and challenges with wirebond inspection Whitepaper Version Author(s) Date R01 Timo Eckhard, Maximilian Klammer 06.09.2017 R02 Timo Eckhard 18.10.2017 Executive Summary: Wirebond inspection
3DPIXA: options and challenges with wirebond inspection Whitepaper Version Author(s) Date R01 Timo Eckhard, Maximilian Klammer 06.09.2017 R02 Timo Eckhard 18.10.2017 Executive Summary: Wirebond inspection
Global Illumination CS334. Daniel G. Aliaga Department of Computer Science Purdue University
 Global Illumination CS334 Daniel G. Aliaga Department of Computer Science Purdue University Recall: Lighting and Shading Light sources Point light Models an omnidirectional light source (e.g., a bulb)
Global Illumination CS334 Daniel G. Aliaga Department of Computer Science Purdue University Recall: Lighting and Shading Light sources Point light Models an omnidirectional light source (e.g., a bulb)
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
FACE RECOGNITION USING INDEPENDENT COMPONENT
 Chapter 5 FACE RECOGNITION USING INDEPENDENT COMPONENT ANALYSIS OF GABORJET (GABORJET-ICA) 5.1 INTRODUCTION PCA is probably the most widely used subspace projection technique for face recognition. A major
Chapter 5 FACE RECOGNITION USING INDEPENDENT COMPONENT ANALYSIS OF GABORJET (GABORJET-ICA) 5.1 INTRODUCTION PCA is probably the most widely used subspace projection technique for face recognition. A major
Computer Graphics. Lecture 13. Global Illumination 1: Ray Tracing and Radiosity. Taku Komura
 Computer Graphics Lecture 13 Global Illumination 1: Ray Tracing and Radiosity Taku Komura 1 Rendering techniques Can be classified as Local Illumination techniques Global Illumination techniques Local
Computer Graphics Lecture 13 Global Illumination 1: Ray Tracing and Radiosity Taku Komura 1 Rendering techniques Can be classified as Local Illumination techniques Global Illumination techniques Local
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Capturing, Modeling, Rendering 3D Structures
 Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Radiometry & BRDFs CS295, Spring 2017 Shuang Zhao
 Radiometry & BRDFs CS295, Spring 2017 Shuang Zhao Computer Science Department University of California, Irvine CS295, Spring 2017 Shuang Zhao 1 Today s Lecture Radiometry Physics of light BRDFs How materials
Radiometry & BRDFs CS295, Spring 2017 Shuang Zhao Computer Science Department University of California, Irvine CS295, Spring 2017 Shuang Zhao 1 Today s Lecture Radiometry Physics of light BRDFs How materials
Image Transfer Methods. Satya Prakash Mallick Jan 28 th, 2003
 Image Transfer Methods Satya Prakash Mallick Jan 28 th, 2003 Objective Given two or more images of the same scene, the objective is to synthesize a novel view of the scene from a view point where there
Image Transfer Methods Satya Prakash Mallick Jan 28 th, 2003 Objective Given two or more images of the same scene, the objective is to synthesize a novel view of the scene from a view point where there
CS201 Computer Vision Camera Geometry
 CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
Local Illumination. CMPT 361 Introduction to Computer Graphics Torsten Möller. Machiraju/Zhang/Möller
 Local Illumination CMPT 361 Introduction to Computer Graphics Torsten Möller Graphics Pipeline Hardware Modelling Transform Visibility Illumination + Shading Perception, Interaction Color Texture/ Realism
Local Illumination CMPT 361 Introduction to Computer Graphics Torsten Möller Graphics Pipeline Hardware Modelling Transform Visibility Illumination + Shading Perception, Interaction Color Texture/ Realism
The Shading Probe: Fast Appearance Acquisition for Mobile AR
 The Shading Probe: Fast Appearance Acquisition for Mobile AR Dan Andrei Calian * Kenny Mitchell Derek Nowrouzezahrai Jan Kautz * * University College London Disney Research Zürich University of Montreal
The Shading Probe: Fast Appearance Acquisition for Mobile AR Dan Andrei Calian * Kenny Mitchell Derek Nowrouzezahrai Jan Kautz * * University College London Disney Research Zürich University of Montreal
How to Compute the Pose of an Object without a Direct View?
 How to Compute the Pose of an Object without a Direct View? Peter Sturm and Thomas Bonfort INRIA Rhône-Alpes, 38330 Montbonnot St Martin, France {Peter.Sturm, Thomas.Bonfort}@inrialpes.fr Abstract. We
How to Compute the Pose of an Object without a Direct View? Peter Sturm and Thomas Bonfort INRIA Rhône-Alpes, 38330 Montbonnot St Martin, France {Peter.Sturm, Thomas.Bonfort}@inrialpes.fr Abstract. We
Announcements. Image Formation: Light and Shading. Photometric image formation. Geometric image formation
 Announcements Image Formation: Light and Shading Homework 0 is due Oct 5, 11:59 PM Homework 1 will be assigned on Oct 5 Reading: Chapters 2: Light and Shading CSE 252A Lecture 3 Geometric image formation
Announcements Image Formation: Light and Shading Homework 0 is due Oct 5, 11:59 PM Homework 1 will be assigned on Oct 5 Reading: Chapters 2: Light and Shading CSE 252A Lecture 3 Geometric image formation
DIFFUSE-SPECULAR SEPARATION OF MULTI-VIEW IMAGES UNDER VARYING ILLUMINATION. Department of Artificial Intelligence Kyushu Institute of Technology
 DIFFUSE-SPECULAR SEPARATION OF MULTI-VIEW IMAGES UNDER VARYING ILLUMINATION Kouki Takechi Takahiro Okabe Department of Artificial Intelligence Kyushu Institute of Technology ABSTRACT Separating diffuse
DIFFUSE-SPECULAR SEPARATION OF MULTI-VIEW IMAGES UNDER VARYING ILLUMINATION Kouki Takechi Takahiro Okabe Department of Artificial Intelligence Kyushu Institute of Technology ABSTRACT Separating diffuse
1 Projective Geometry
 CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
Overview of Active Vision Techniques
 SIGGRAPH 99 Course on 3D Photography Overview of Active Vision Techniques Brian Curless University of Washington Overview Introduction Active vision techniques Imaging radar Triangulation Moire Active
SIGGRAPH 99 Course on 3D Photography Overview of Active Vision Techniques Brian Curless University of Washington Overview Introduction Active vision techniques Imaging radar Triangulation Moire Active
3D Scanning. Qixing Huang Feb. 9 th Slide Credit: Yasutaka Furukawa
 3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
High Dynamic Range Imaging.
 High Dynamic Range Imaging High Dynamic Range [3] In photography, dynamic range (DR) is measured in exposure value (EV) differences or stops, between the brightest and darkest parts of the image that show
High Dynamic Range Imaging High Dynamic Range [3] In photography, dynamic range (DR) is measured in exposure value (EV) differences or stops, between the brightest and darkest parts of the image that show