Light transport matrices
|
|
|
- Maurice Tyler
- 5 years ago
- Views:
Transcription

1 Light transport matrices , , Computational Photography Fall 2018, Lecture 18
2 Course announcements Homework 5 has been posted. - Due on Friday November 9 th. Any problems with homework 4? No elevator pitch presentations for final projects. Extra office hours this week: - Monday 1:30-3:30 pm. - Tuesday noon-2:00 pm. - Friday s office hours will be held by Alankar. Great talk this Thursday: Eric Fossum, inventor of the CMOS sensor, will talk about quantum (i.e., photon-counting) CMOS sensors.
3 Overview of today s lecture Leftover from last time: Generalized bas-relief ambiguity. The light transport matrix. Image-based relighting. Photometric stereo revisited. Optical computing using the light transport matrix. Dual photography.
4 Slide credits These slides were directly adapted from: Matt O Toole (CMU).
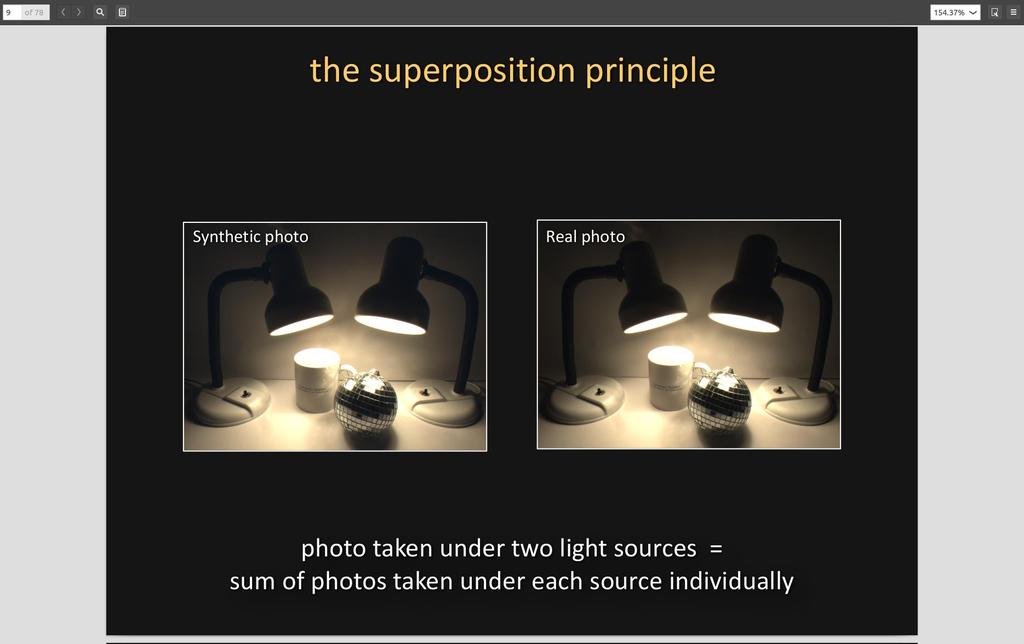
5 The light transport matrix
6 How do these three images relate to each other?
7 How do these three images relate to each other?
8
9
10 why is the error not exactly zero?
11
12
13

14
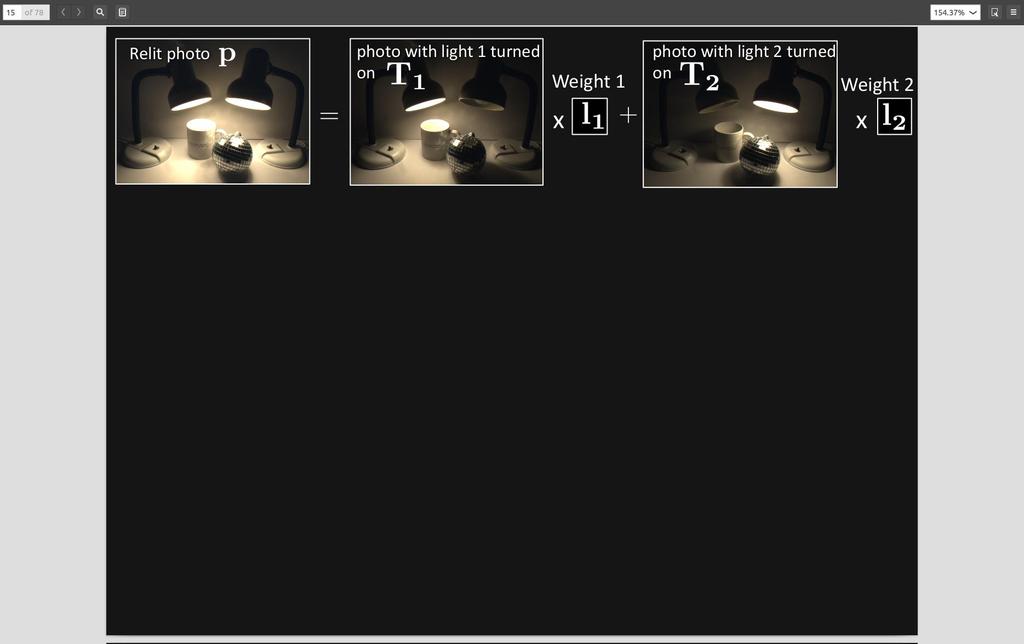
15
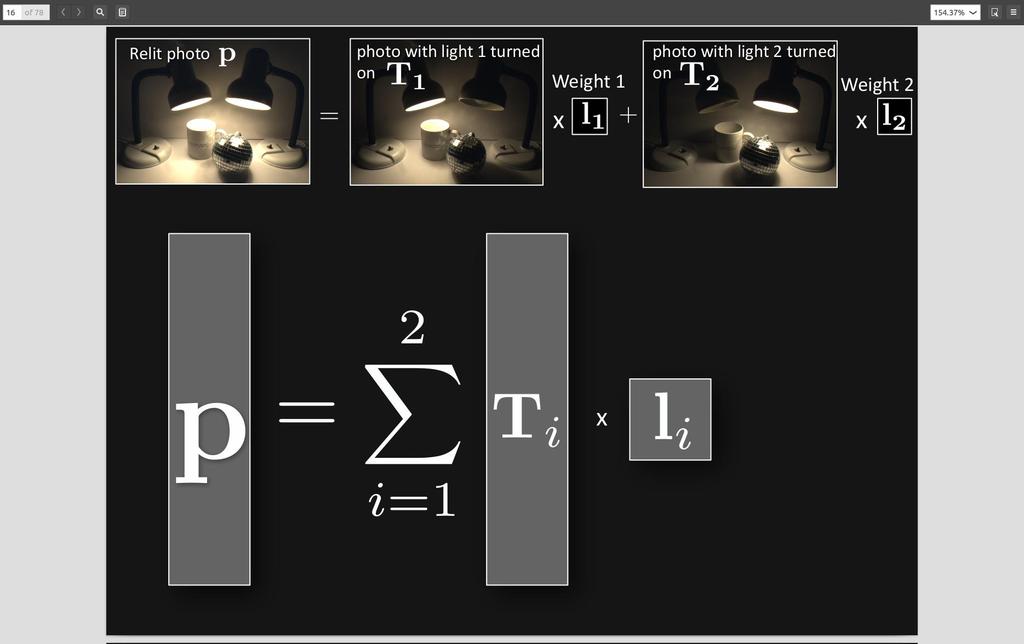
16
17
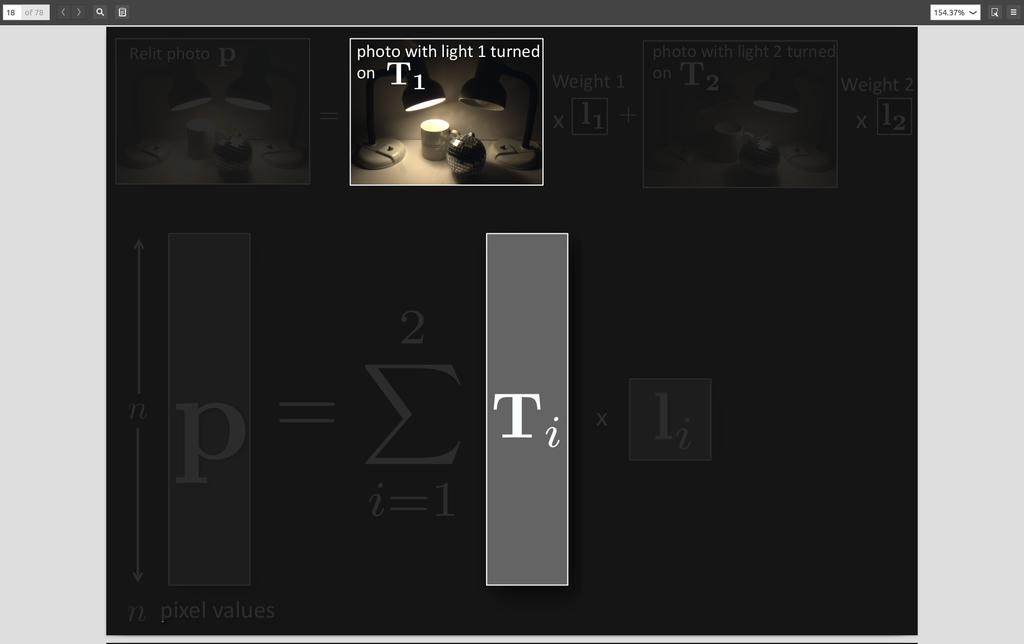
18
19
20
21
22
23
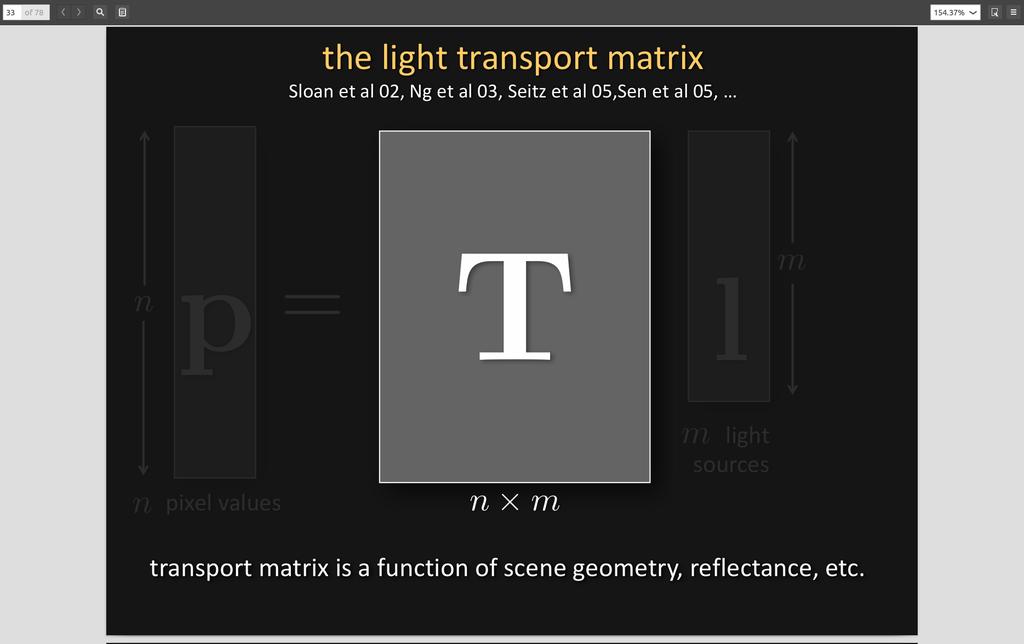
24 light transport matrix Can you think of a case where we have a very large m?
25 Use a projector What does each row and column of T correspond to here?

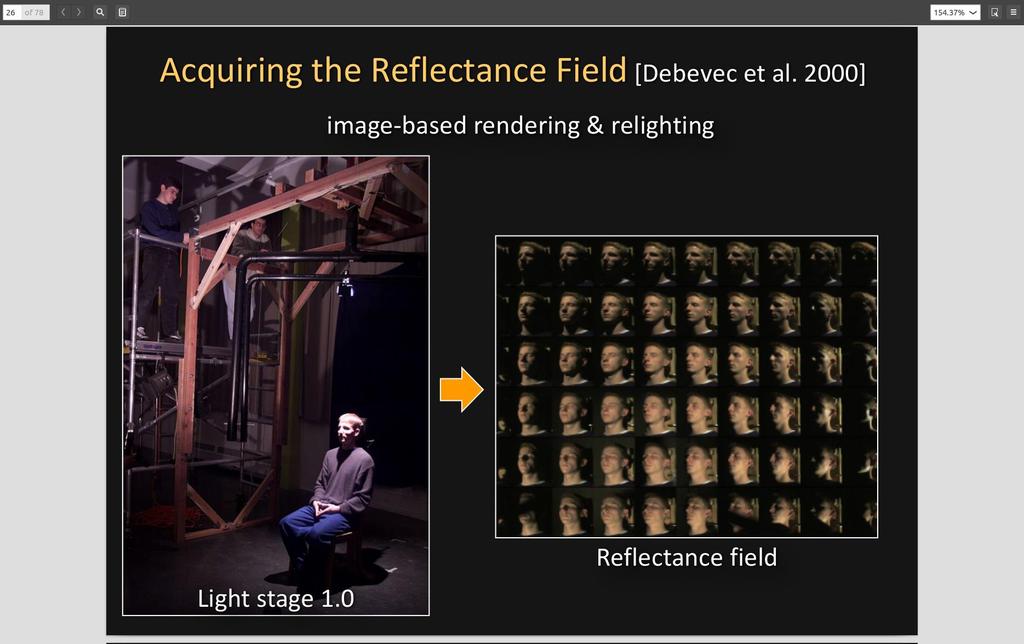
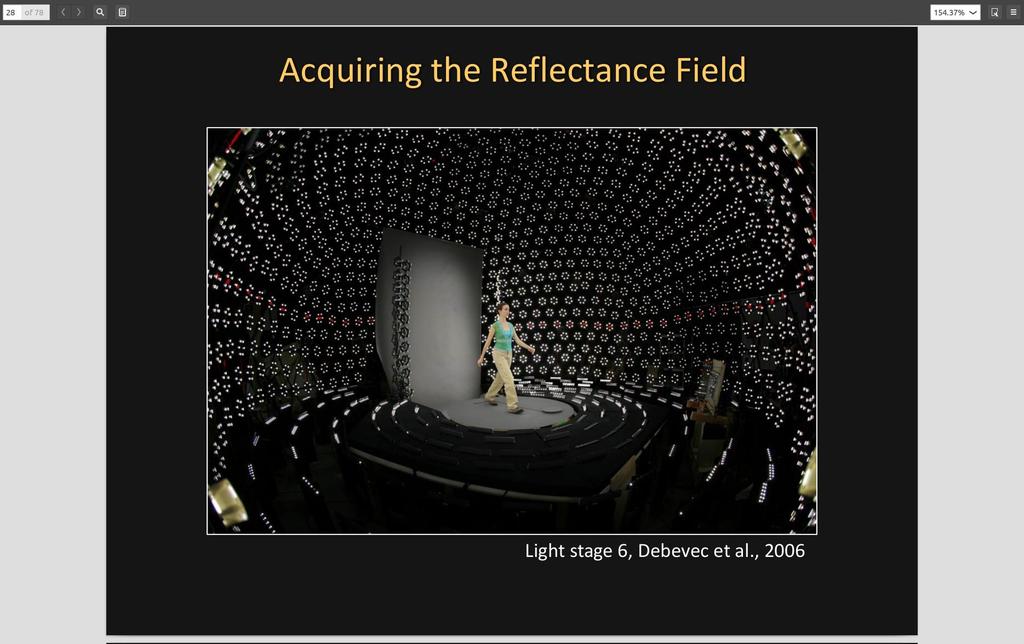
26 Use a projector How would you go about measuring the light transport matrix?
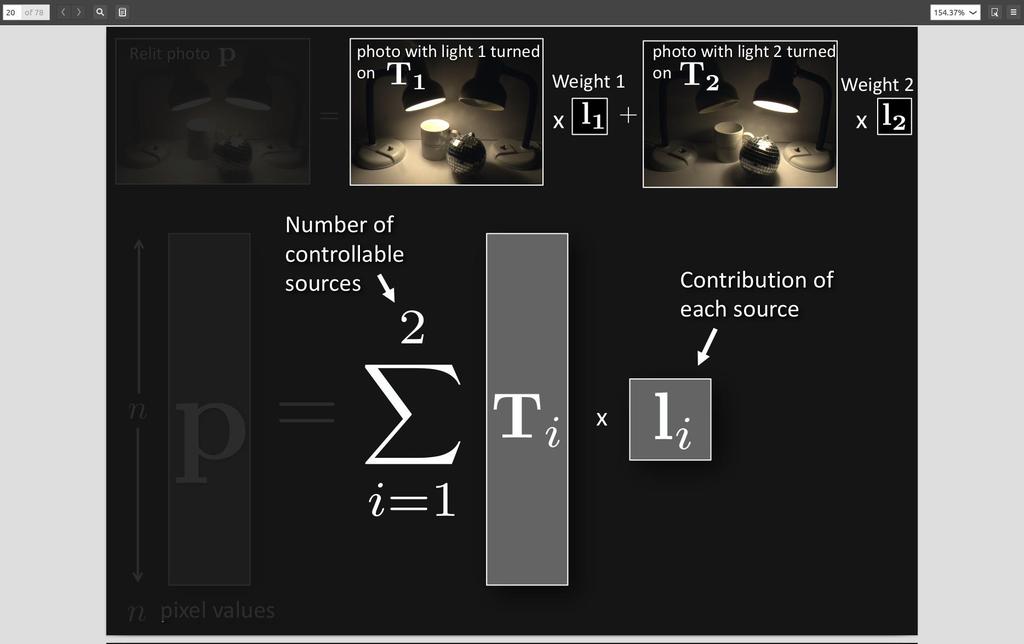
27 Image-based relighting
28 Let s say I have measured T. What does it mean to right-multiply it with some vector l?
29 Image-based relighting: Use the measurements I already have of the scene (the pictures I took when measuring T) to simulate new illuminations of the scene.
30

31 Great demonstration:
32
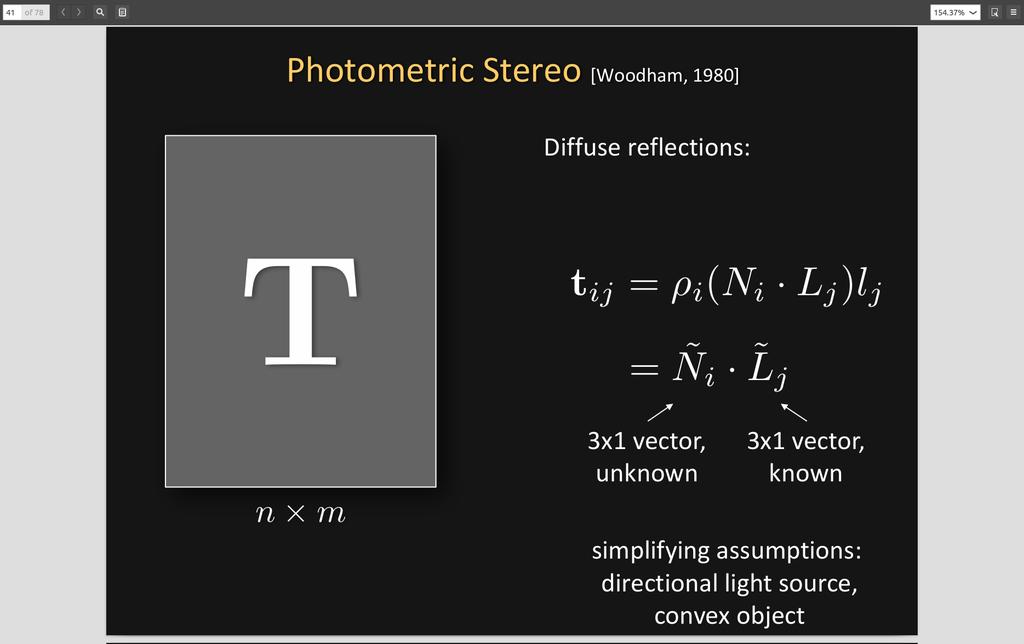
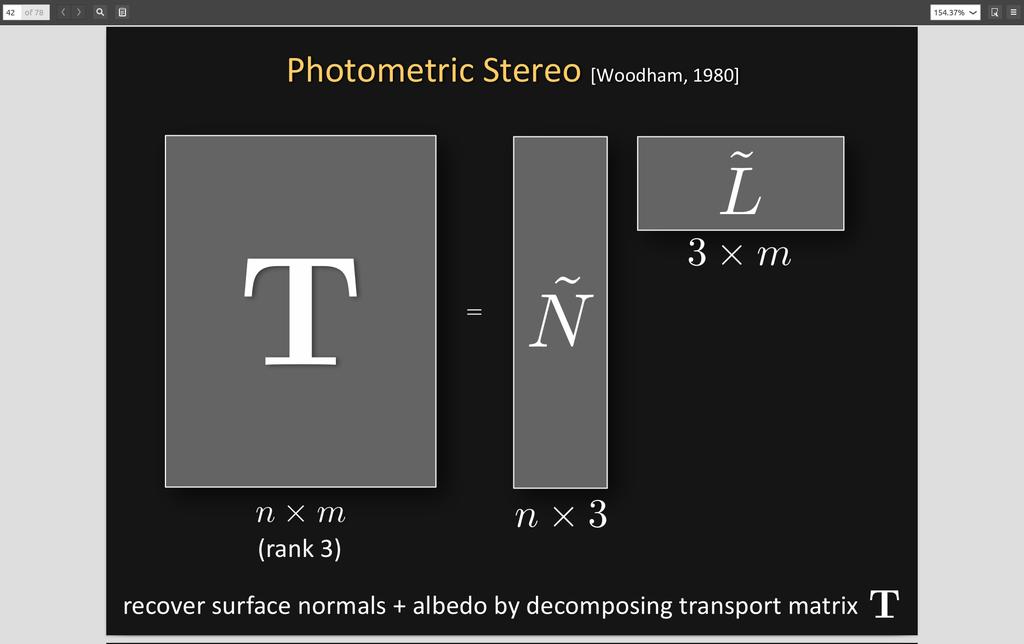
33 Photometric stereo revisited
34

35 What is this?
36
37

38 v=4gilaotjhno
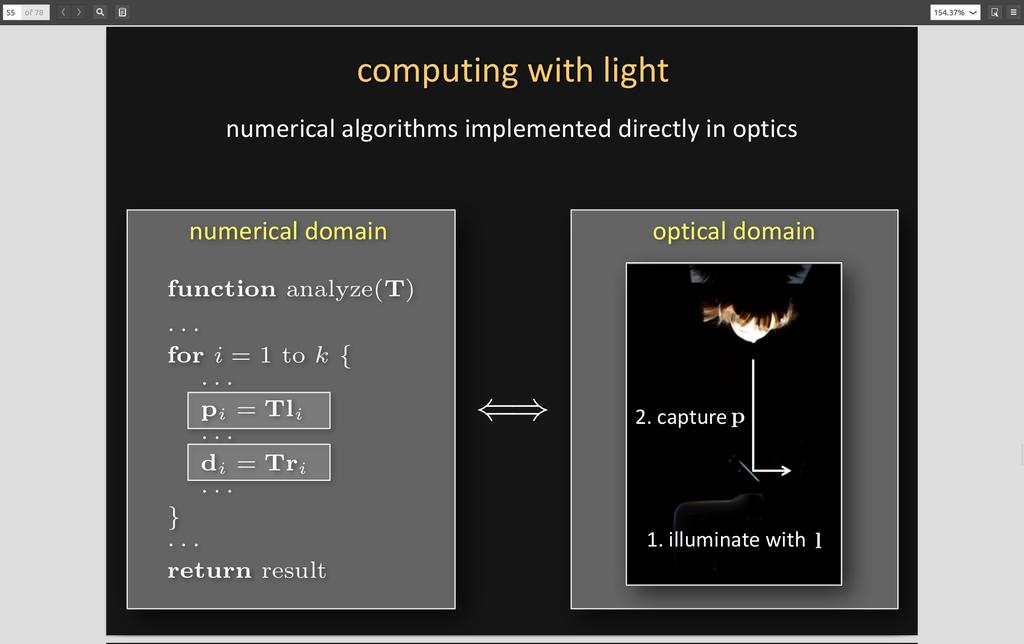
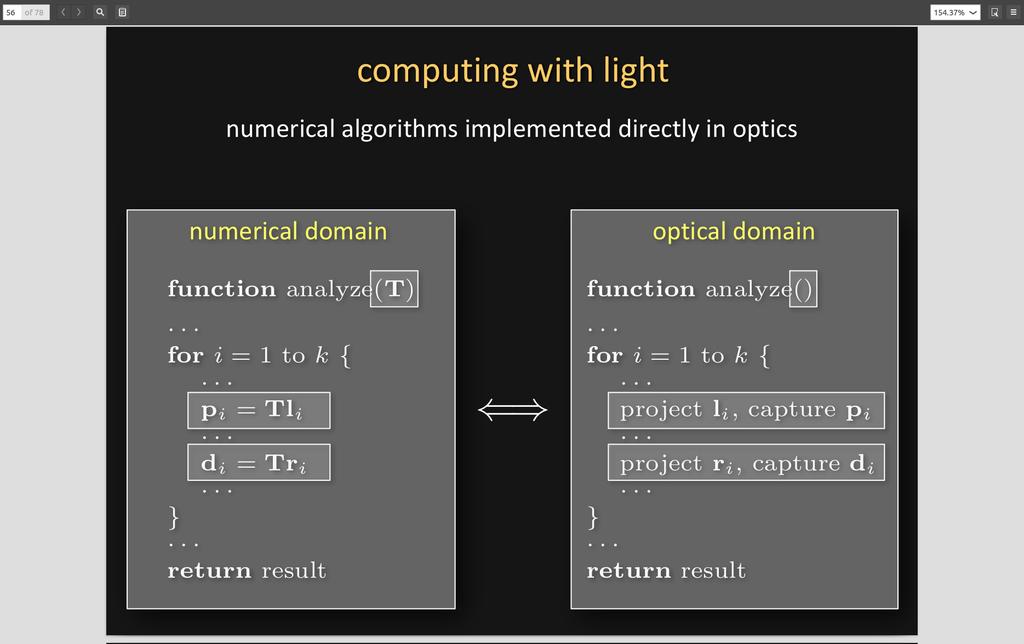
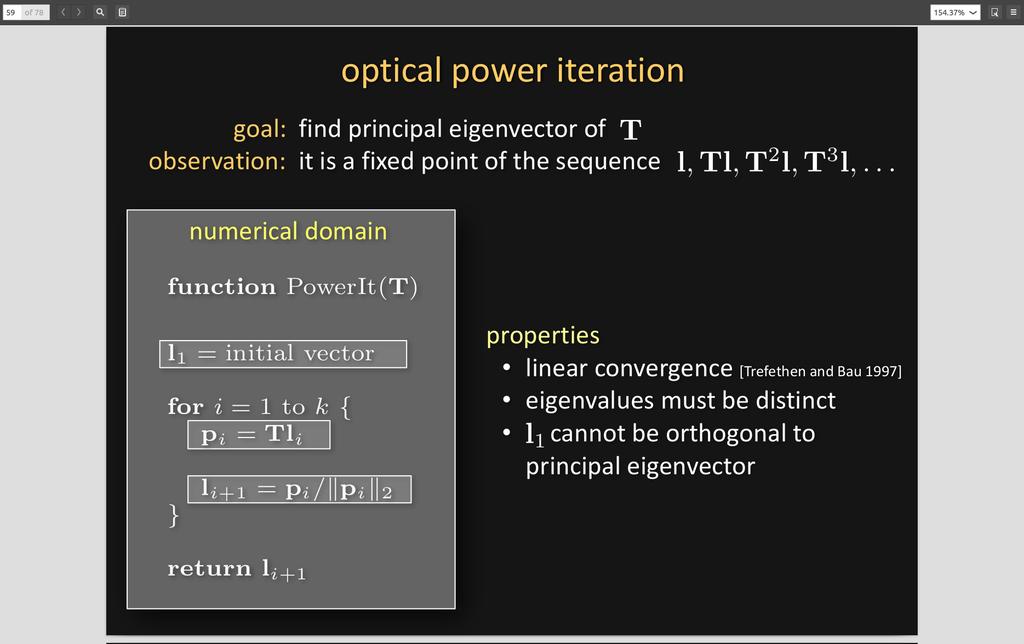
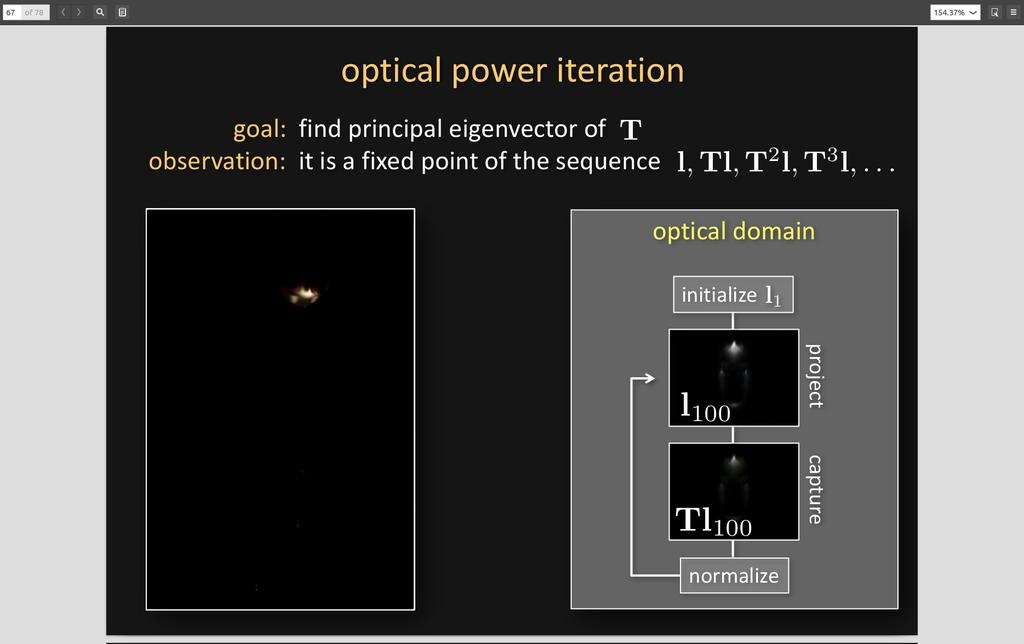
39 Optical computing using the light transport matrix

40
41
42
43
44
45
46
47

48 What do we call these patterns?
49
50
51
52
53
54
55
56
57
58
59
60 How would you measure the light transport matrix T?
61 How would you measure the light transport matrix T? Exhaustive/naïve approach: turn on projector pixels one at a time and take a photo for each of them. What does each photo correspond to in T?
62 How would you measure the light transport matrix T? Exhaustive/naïve approach: turn on projector pixels one at a time and take a photo for each of them. How many photos do we need to capture?

63
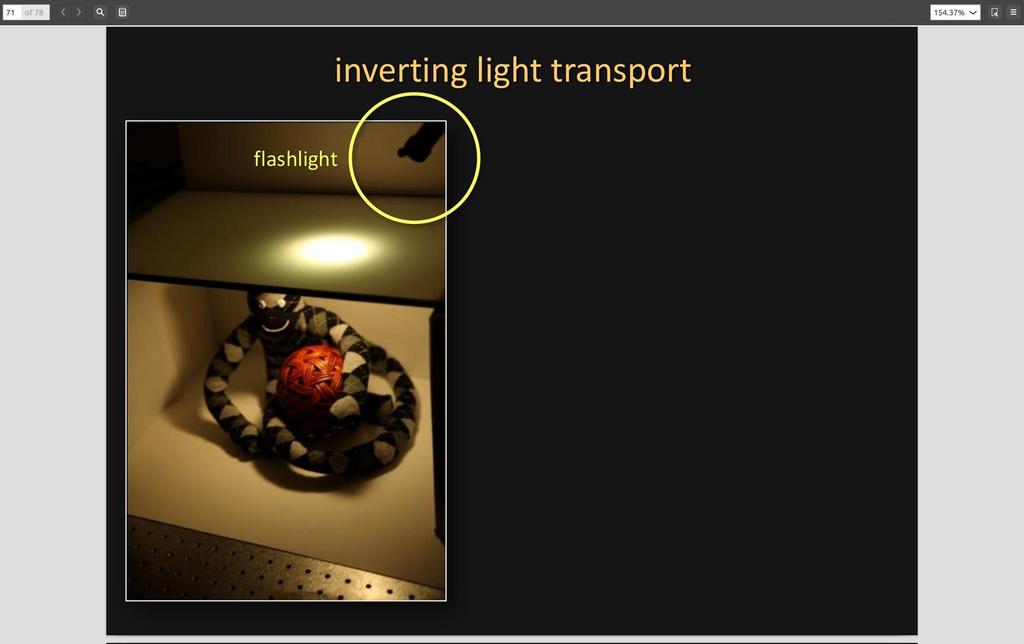
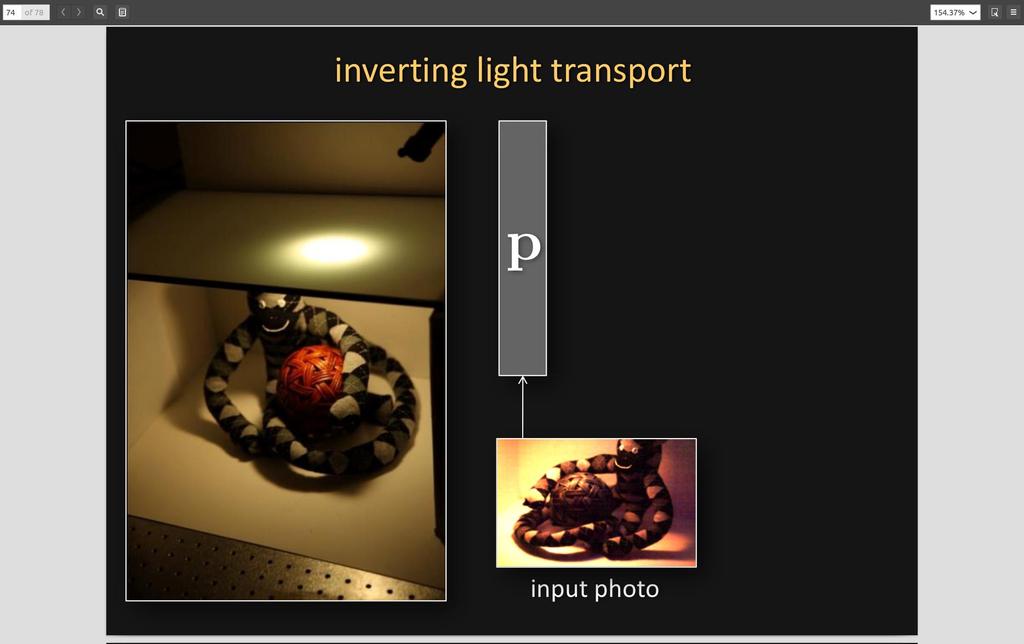
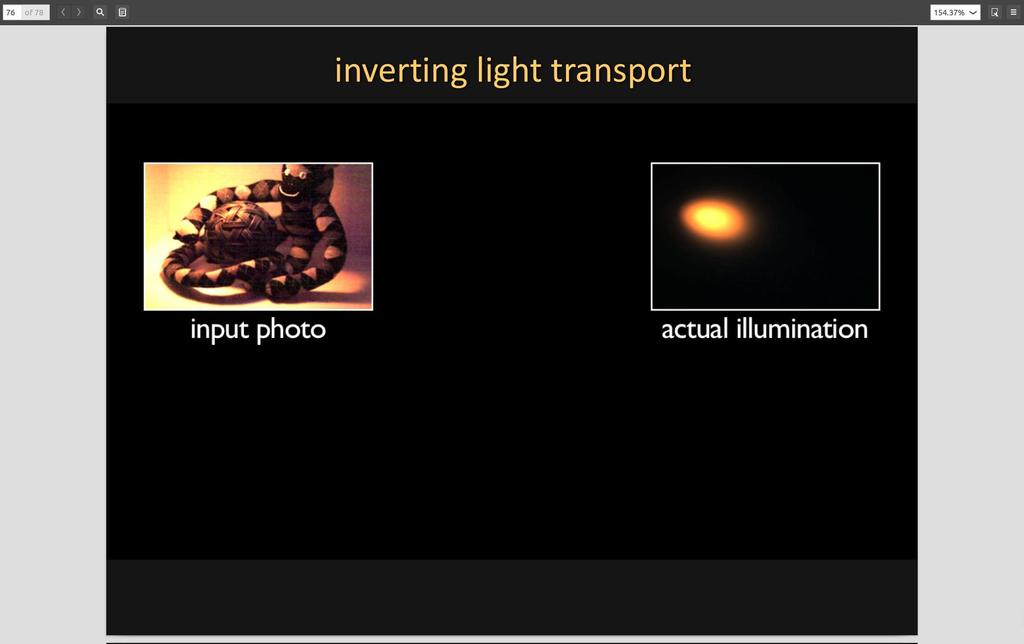
64 Inverse transport
65
66
67
68
69 How do you solve this problem if you know the light transport matrix T?
70 What do we do here?
71 What if T is not invertible?


72 How do you usually solve for l when T is large?
73 Reminder from lecture 10: Gradient descent Given the loss function: E f = Gf v 2 Minimize by iteratively computing: f i+1 = f i η i r i, r i = v Af i, η i = ri T r i r i T Ar i for i = 0, 1,, N Is this cheaper than the pseudo-inverse approach? We never need to compute A, only its products with vectors f, r. Vectors f, r are images. Because A is the Laplacian matrix, these matrix-vector products can be efficiently computed using convolutions with the Laplacian kernel.
74 Gradient descent in this case Given the loss function: E f = Gf v 2 Minimize by iteratively computing: f i+1 = f i η i r i, r i = v Af i, η i = ri T r i r i T Ar i for i = 0, 1,, N Is this cheaper than the pseudo-inverse approach? We never need to compute A, only its products with vectors f, r. Vectors f, r are images. What are f, r in this case? Because A is the Laplacian matrix, these matrix-vector products can be efficiently computed using convolutions with the Laplacian kernel. How do we compute matrix-vector products efficiently in this case?

75
76
77 Dual photography
78 How do the light transport matrices for these two scenes relate to each other?

79 Helmholtz reciprocity: The two matrices are the transpose of each other. Great demonstration:
80 References Basic reading: Sloan et al., Precomputed radiance transfer for real-time rendering in dynamic, lowfrequency lighting environments, SIGGRAPH Ng et al., All-frequency shadows using non-linear wavelet lighting approximation, SIGGRAPH Seitz et al., A theory of inverse light transport, ICCV These three papers all discuss the concept of light transport matrix in detail. Debevec et al., Acquiring the reflectance field of a human face, SIGGRAPH The paper on image-based relighting. Woodham et al., Photometric stereo: A reflectance map technique for determining surface orientation from image intensity, IUSIA The original photometric stereo paper. O Toole and Kutulakos, Optical computing for fast light transport analysis, SIGGRAPH Asia The paper on eigenanalysis and optical computing using light transport matrices. Sen et al., Dual photography, SIGGRAPH The dual photography paper. Additional reading: Peers et al., Compressive light transport sensing, TOG Wang et al., Kernel Nyström method for light transport, SIGGRAPH These two papers discuss alternative ways for efficient acquisition of the light transport matrix, using assumptions on its algebraic structure.
Computational light transport
 Computational light transport http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 19 Course announcements Homework 5 has been posted. - Due on
Computational light transport http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 19 Course announcements Homework 5 has been posted. - Due on
More computational light transport
 More computational light transport http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 23 Course announcements Sign-up for final project checkpoint
More computational light transport http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 23 Course announcements Sign-up for final project checkpoint
Light Transport CS434. Daniel G. Aliaga Department of Computer Science Purdue University
 Light Transport CS434 Daniel G. Aliaga Department of Computer Science Purdue University Topics Local and Global Illumination Models Helmholtz Reciprocity Dual Photography/Light Transport (in Real-World)
Light Transport CS434 Daniel G. Aliaga Department of Computer Science Purdue University Topics Local and Global Illumination Models Helmholtz Reciprocity Dual Photography/Light Transport (in Real-World)
3D Shape and Indirect Appearance By Structured Light Transport
 3D Shape and Indirect Appearance By Structured Light Transport CVPR 2014 - Best paper honorable mention Matthew O Toole, John Mather, Kiriakos N. Kutulakos Department of Computer Science University of
3D Shape and Indirect Appearance By Structured Light Transport CVPR 2014 - Best paper honorable mention Matthew O Toole, John Mather, Kiriakos N. Kutulakos Department of Computer Science University of
Photometric stereo , , Computational Photography Fall 2018, Lecture 17
 Photometric stereo http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 17 Course announcements Homework 4 is still ongoing - Any questions? Feedback
Photometric stereo http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 17 Course announcements Homework 4 is still ongoing - Any questions? Feedback
Stereo and structured light
 Stereo and structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 20 Course announcements Homework 5 is still ongoing. - Make sure
Stereo and structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 20 Course announcements Homework 5 is still ongoing. - Make sure
Tracking Computer Vision Spring 2018, Lecture 24
 Tracking http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 24 Course announcements Homework 6 has been posted and is due on April 20 th. - Any questions about the homework? - How
Tracking http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 24 Course announcements Homework 6 has been posted and is due on April 20 th. - Any questions about the homework? - How
Why is computer vision difficult?
 Why is computer vision difficult? Viewpoint variation Illumination Scale Why is computer vision difficult? Intra-class variation Motion (Source: S. Lazebnik) Background clutter Occlusion Challenges: local
Why is computer vision difficult? Viewpoint variation Illumination Scale Why is computer vision difficult? Intra-class variation Motion (Source: S. Lazebnik) Background clutter Occlusion Challenges: local
Inverse Light Transport (and next Separation of Global and Direct Illumination)
") Inverse ight Transport (and next Separation of Global and Direct Illumination) CS434 Daniel G. Aliaga Department of Computer Science Purdue University Inverse ight Transport ight Transport Model transfer
Inverse ight Transport (and next Separation of Global and Direct Illumination) CS434 Daniel G. Aliaga Department of Computer Science Purdue University Inverse ight Transport ight Transport Model transfer
CS4670/5760: Computer Vision Kavita Bala Scott Wehrwein. Lecture 23: Photometric Stereo
 CS4670/5760: Computer Vision Kavita Bala Scott Wehrwein Lecture 23: Photometric Stereo Announcements PA3 Artifact due tonight PA3 Demos Thursday Signups close at 4:30 today No lecture on Friday Last Time:
CS4670/5760: Computer Vision Kavita Bala Scott Wehrwein Lecture 23: Photometric Stereo Announcements PA3 Artifact due tonight PA3 Demos Thursday Signups close at 4:30 today No lecture on Friday Last Time:
Lecture 22: Basic Image Formation CAP 5415
 Lecture 22: Basic Image Formation CAP 5415 Today We've talked about the geometry of scenes and how that affects the image We haven't talked about light yet Today, we will talk about image formation and
Lecture 22: Basic Image Formation CAP 5415 Today We've talked about the geometry of scenes and how that affects the image We haven't talked about light yet Today, we will talk about image formation and
Radiometry and reflectance
 Radiometry and reflectance http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 16 Course announcements Homework 4 is still ongoing - Any questions?
Radiometry and reflectance http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 16 Course announcements Homework 4 is still ongoing - Any questions?
CS635 Spring Department of Computer Science Purdue University
 Light Transport CS635 Spring 2010 Daniel G Aliaga Daniel G. Aliaga Department of Computer Science Purdue University Topics Local and GlobalIllumination Models Helmholtz Reciprocity Dual Photography/Light
Light Transport CS635 Spring 2010 Daniel G Aliaga Daniel G. Aliaga Department of Computer Science Purdue University Topics Local and GlobalIllumination Models Helmholtz Reciprocity Dual Photography/Light
Image warping , , Computational Photography Fall 2017, Lecture 10
 Image warping http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 10 Course announcements Second make-up lecture on Friday, October 6 th, noon-1:30
Image warping http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 10 Course announcements Second make-up lecture on Friday, October 6 th, noon-1:30
Capturing light. Source: A. Efros
 Capturing light Source: A. Efros Review Pinhole projection models What are vanishing points and vanishing lines? What is orthographic projection? How can we approximate orthographic projection? Lenses
Capturing light Source: A. Efros Review Pinhole projection models What are vanishing points and vanishing lines? What is orthographic projection? How can we approximate orthographic projection? Lenses
Precomputation-Based Real-Time Rendering
 CS294-13: Advanced Computer Graphics Lecture #11 Real-Time Rendering University of California, Berkeley Precomputation-Based Real-Time Rendering Lecture #11: Wednesday, 7 October 2009 Lecturer: Ravi Ramamoorthi
CS294-13: Advanced Computer Graphics Lecture #11 Real-Time Rendering University of California, Berkeley Precomputation-Based Real-Time Rendering Lecture #11: Wednesday, 7 October 2009 Lecturer: Ravi Ramamoorthi
Motivation. My General Philosophy. Assumptions. Advanced Computer Graphics (Spring 2013) Precomputation-Based Relighting
 Precomputation-Based Relighting") Advanced Computer Graphics (Spring 2013) CS 283, Lecture 17: Precomputation-Based Real-Time Rendering Ravi Ramamoorthi http://inst.eecs.berkeley.edu/~cs283/sp13 Motivation Previously: seen IBR. Use measured
Advanced Computer Graphics (Spring 2013) CS 283, Lecture 17: Precomputation-Based Real-Time Rendering Ravi Ramamoorthi http://inst.eecs.berkeley.edu/~cs283/sp13 Motivation Previously: seen IBR. Use measured
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 34: Segmentation From Sandlot Science Announcements In-class exam this Friday, December 3 Review session in class on Wednesday Final projects: Slides due: Sunday,
CS4670: Computer Vision Noah Snavely Lecture 34: Segmentation From Sandlot Science Announcements In-class exam this Friday, December 3 Review session in class on Wednesday Final projects: Slides due: Sunday,
Announcements. Photometric Stereo. Shading reveals 3-D surface geometry. Photometric Stereo Rigs: One viewpoint, changing lighting
 Announcements Today Photometric Stereo, next lecture return to stereo Photometric Stereo Introduction to Computer Vision CSE152 Lecture 16 Shading reveals 3-D surface geometry Two shape-from-x methods
Announcements Today Photometric Stereo, next lecture return to stereo Photometric Stereo Introduction to Computer Vision CSE152 Lecture 16 Shading reveals 3-D surface geometry Two shape-from-x methods
CS635 Spring Department of Computer Science Purdue University
 Inverse Light Transport CS635 Spring 200 Daniel G Aliaga Daniel G. Aliaga Department of Computer Science Purdue University Inverse Light Transport Light Transport Model transfer of light from source (e.g.,
Inverse Light Transport CS635 Spring 200 Daniel G Aliaga Daniel G. Aliaga Department of Computer Science Purdue University Inverse Light Transport Light Transport Model transfer of light from source (e.g.,
Computational Imaging for Self-Driving Vehicles
 CVPR 2018 Computational Imaging for Self-Driving Vehicles Jan Kautz--------Ramesh Raskar--------Achuta Kadambi--------Guy Satat Computational Imaging for Self-Driving Vehicles Jan Kautz--------Ramesh Raskar--------Achuta
CVPR 2018 Computational Imaging for Self-Driving Vehicles Jan Kautz--------Ramesh Raskar--------Achuta Kadambi--------Guy Satat Computational Imaging for Self-Driving Vehicles Jan Kautz--------Ramesh Raskar--------Achuta
3D Photography: Stereo
 3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
Structured light , , Computational Photography Fall 2017, Lecture 27
 Structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 27 Course announcements Homework 5 has been graded. - Mean: 129. - Median:
Structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 27 Course announcements Homework 5 has been graded. - Mean: 129. - Median:
Photometric Stereo.
 Photometric Stereo Photometric Stereo v.s.. Structure from Shading [1] Photometric stereo is a technique in computer vision for estimating the surface normals of objects by observing that object under
Photometric Stereo Photometric Stereo v.s.. Structure from Shading [1] Photometric stereo is a technique in computer vision for estimating the surface normals of objects by observing that object under
Templates, Image Pyramids, and Filter Banks
 Templates, Image Pyramids, and Filter Banks Computer Vision James Hays, Brown Slides: Hoiem and others Reminder Project due Friday Fourier Bases Teases away fast vs. slow changes in the image. This change
Templates, Image Pyramids, and Filter Banks Computer Vision James Hays, Brown Slides: Hoiem and others Reminder Project due Friday Fourier Bases Teases away fast vs. slow changes in the image. This change
Global Illumination. COMP 575/770 Spring 2013
 Global Illumination COMP 575/770 Spring 2013 Final Exam and Projects COMP 575 Final Exam Friday, May 3 4:00 pm COMP 770 (and 575 extra credit) Projects Final report due by end of day, May 1 Presentations:
Global Illumination COMP 575/770 Spring 2013 Final Exam and Projects COMP 575 Final Exam Friday, May 3 4:00 pm COMP 770 (and 575 extra credit) Projects Final report due by end of day, May 1 Presentations:
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Light & Perception Announcements Quiz on Tuesday Project 3 code due Monday, April 17, by 11:59pm artifact due Wednesday, April 19, by 11:59pm Can we determine shape
CS5670: Computer Vision Noah Snavely Light & Perception Announcements Quiz on Tuesday Project 3 code due Monday, April 17, by 11:59pm artifact due Wednesday, April 19, by 11:59pm Can we determine shape
Focal stacks and lightfields
 Focal stacks and lightfields http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 11 Course announcements Homework 3 is out. - Due October 12 th.
Focal stacks and lightfields http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 11 Course announcements Homework 3 is out. - Due October 12 th.
Other approaches to obtaining 3D structure
 Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Introduction to Computer Vision. Week 8, Fall 2010 Instructor: Prof. Ko Nishino
 Introduction to Computer Vision Week 8, Fall 2010 Instructor: Prof. Ko Nishino Midterm Project 2 without radial distortion correction with radial distortion correction Light Light Light! How do you recover
Introduction to Computer Vision Week 8, Fall 2010 Instructor: Prof. Ko Nishino Midterm Project 2 without radial distortion correction with radial distortion correction Light Light Light! How do you recover
Epipolar geometry contd.
 Epipolar geometry contd. Estimating F 8-point algorithm The fundamental matrix F is defined by x' T Fx = 0 for any pair of matches x and x in two images. Let x=(u,v,1) T and x =(u,v,1) T, each match gives
Epipolar geometry contd. Estimating F 8-point algorithm The fundamental matrix F is defined by x' T Fx = 0 for any pair of matches x and x in two images. Let x=(u,v,1) T and x =(u,v,1) T, each match gives
Two-view geometry Computer Vision Spring 2018, Lecture 10
 Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 20: Light, reflectance and photometric stereo Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Properties
CS6670: Computer Vision Noah Snavely Lecture 20: Light, reflectance and photometric stereo Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Properties
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 21: Light, reflectance and photometric stereo Announcements Final projects Midterm reports due November 24 (next Tuesday) by 11:59pm (upload to CMS) State the
CS6670: Computer Vision Noah Snavely Lecture 21: Light, reflectance and photometric stereo Announcements Final projects Midterm reports due November 24 (next Tuesday) by 11:59pm (upload to CMS) State the
3D Photography: Active Ranging, Structured Light, ICP
 3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
Using a Raster Display Device for Photometric Stereo
 DEPARTMEN T OF COMP UTING SC IENC E Using a Raster Display Device for Photometric Stereo Nathan Funk & Yee-Hong Yang CRV 2007 May 30, 2007 Overview 2 MODEL 3 EXPERIMENTS 4 CONCLUSIONS 5 QUESTIONS 1. Background
DEPARTMEN T OF COMP UTING SC IENC E Using a Raster Display Device for Photometric Stereo Nathan Funk & Yee-Hong Yang CRV 2007 May 30, 2007 Overview 2 MODEL 3 EXPERIMENTS 4 CONCLUSIONS 5 QUESTIONS 1. Background
Integrated three-dimensional reconstruction using reflectance fields
 www.ijcsi.org 32 Integrated three-dimensional reconstruction using reflectance fields Maria-Luisa Rosas 1 and Miguel-Octavio Arias 2 1,2 Computer Science Department, National Institute of Astrophysics,
www.ijcsi.org 32 Integrated three-dimensional reconstruction using reflectance fields Maria-Luisa Rosas 1 and Miguel-Octavio Arias 2 1,2 Computer Science Department, National Institute of Astrophysics,
Re-rendering from a Dense/Sparse Set of Images
 Re-rendering from a Dense/Sparse Set of Images Ko Nishino Institute of Industrial Science The Univ. of Tokyo (Japan Science and Technology) kon@cvl.iis.u-tokyo.ac.jp Virtual/Augmented/Mixed Reality Three
Re-rendering from a Dense/Sparse Set of Images Ko Nishino Institute of Industrial Science The Univ. of Tokyo (Japan Science and Technology) kon@cvl.iis.u-tokyo.ac.jp Virtual/Augmented/Mixed Reality Three
Non-line-of-sight imaging
 Non-line-of-sight imaging http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 25 Course announcements Homework 6 will be posted tonight. - Will
Non-line-of-sight imaging http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 25 Course announcements Homework 6 will be posted tonight. - Will
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve Seitz, Rick Szeliski,
Matrices. A Matrix (This one has 2 Rows and 3 Columns) To add two matrices: add the numbers in the matching positions:
 To add two matrices: add the numbers in the matching positions:") Matrices A Matrix is an array of numbers: We talk about one matrix, or several matrices. There are many things we can do with them... Adding A Matrix (This one has 2 Rows and 3 Columns) To add two matrices:
Matrices A Matrix is an array of numbers: We talk about one matrix, or several matrices. There are many things we can do with them... Adding A Matrix (This one has 2 Rows and 3 Columns) To add two matrices:
Prof. Trevor Darrell Lecture 18: Multiview and Photometric Stereo
 C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 18: Multiview and Photometric Stereo Today Multiview stereo revisited Shape from large image collections Voxel Coloring Digital
C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 18: Multiview and Photometric Stereo Today Multiview stereo revisited Shape from large image collections Voxel Coloring Digital
Geometric camera models and calibration
 Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
A Frequency Analysis of Light Transport
 A Frequency Analysis of Light Transport Frédo Durand MIT CSAIL With Nicolas Holzschuch, Cyril Soler, Eric Chan & Francois Sillion Artis Gravir/Imag-Inria & MIT CSAIL Our research 3D rendering Light transport
A Frequency Analysis of Light Transport Frédo Durand MIT CSAIL With Nicolas Holzschuch, Cyril Soler, Eric Chan & Francois Sillion Artis Gravir/Imag-Inria & MIT CSAIL Our research 3D rendering Light transport
x = 12 x = 12 1x = 16
 2.2 - The Inverse of a Matrix We've seen how to add matrices, multiply them by scalars, subtract them, and multiply one matrix by another. The question naturally arises: Can we divide one matrix by another?
2.2 - The Inverse of a Matrix We've seen how to add matrices, multiply them by scalars, subtract them, and multiply one matrix by another. The question naturally arises: Can we divide one matrix by another?
Image gradients and edges April 11 th, 2017
 4//27 Image gradients and edges April th, 27 Yong Jae Lee UC Davis PS due this Friday Announcements Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
4//27 Image gradients and edges April th, 27 Yong Jae Lee UC Davis PS due this Friday Announcements Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
IMAGE-BASED RENDERING AND ANIMATION
 DH2323 DGI17 INTRODUCTION TO COMPUTER GRAPHICS AND INTERACTION IMAGE-BASED RENDERING AND ANIMATION Christopher Peters CST, KTH Royal Institute of Technology, Sweden chpeters@kth.se http://kth.academia.edu/christopheredwardpeters
DH2323 DGI17 INTRODUCTION TO COMPUTER GRAPHICS AND INTERACTION IMAGE-BASED RENDERING AND ANIMATION Christopher Peters CST, KTH Royal Institute of Technology, Sweden chpeters@kth.se http://kth.academia.edu/christopheredwardpeters
Image gradients and edges April 10 th, 2018
 Image gradients and edges April th, 28 Yong Jae Lee UC Davis PS due this Friday Announcements Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
Image gradients and edges April th, 28 Yong Jae Lee UC Davis PS due this Friday Announcements Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
PetShop (BYU Students, SIGGRAPH 2006)
") Now Playing: PetShop (BYU Students, SIGGRAPH 2006) My Mathematical Mind Spoon From Gimme Fiction Released May 10, 2005 Geometric Objects in Computer Graphics Rick Skarbez, Instructor COMP 575 August 30,
Now Playing: PetShop (BYU Students, SIGGRAPH 2006) My Mathematical Mind Spoon From Gimme Fiction Released May 10, 2005 Geometric Objects in Computer Graphics Rick Skarbez, Instructor COMP 575 August 30,
Outline of Lecture. Real-Time High Quality Rendering. Geometry or Vertex Pipeline. Basic Hardware Pipeline. Pixel or Fragment Pipeline
 Real-Time High Quality Rendering CSE 274 [Fall 2015], Lecture 2 Graphics Hardware Pipeline, Reflection and Rendering Equations, Taonomy of Methods http://www.cs.ucsd.edu/~ravir Outline of Lecture Taonomy
Real-Time High Quality Rendering CSE 274 [Fall 2015], Lecture 2 Graphics Hardware Pipeline, Reflection and Rendering Equations, Taonomy of Methods http://www.cs.ucsd.edu/~ravir Outline of Lecture Taonomy
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Illuminating the Big Picture
 EE16A Imaging 2 Why? Imaging 1: Finding a link between physical quantities and voltage is powerful If you can digitize it, you can do anything (IOT devices, internet, code, processing) Imaging 2: What
EE16A Imaging 2 Why? Imaging 1: Finding a link between physical quantities and voltage is powerful If you can digitize it, you can do anything (IOT devices, internet, code, processing) Imaging 2: What
Finite Math - J-term Homework. Section Inverse of a Square Matrix
 Section.5-77, 78, 79, 80 Finite Math - J-term 017 Lecture Notes - 1/19/017 Homework Section.6-9, 1, 1, 15, 17, 18, 1, 6, 9, 3, 37, 39, 1,, 5, 6, 55 Section 5.1-9, 11, 1, 13, 1, 17, 9, 30 Section.5 - Inverse
Section.5-77, 78, 79, 80 Finite Math - J-term 017 Lecture Notes - 1/19/017 Homework Section.6-9, 1, 1, 15, 17, 18, 1, 6, 9, 3, 37, 39, 1,, 5, 6, 55 Section 5.1-9, 11, 1, 13, 1, 17, 9, 30 Section.5 - Inverse
Probabilistic PPM. Claude Knaus Matthias Zwicker University of Bern. State of the Art in Photon Density Estimation
 Probabilistic PPM Claude Knaus Matthias Zwicker University of Bern State of the Art in Photon Density Estimation Modified slides and presentation by Toshiya Hachisuka Probabilistic PPM Alternative derivation
Probabilistic PPM Claude Knaus Matthias Zwicker University of Bern State of the Art in Photon Density Estimation Modified slides and presentation by Toshiya Hachisuka Probabilistic PPM Alternative derivation
CSCI-6962 Advanced Computer Graphics
 Luxo Jr. CSCI-6962 Advanced Computer Graphics Pixar Animation Studios, 1986 Director: John Lasseter CSCI-6962 Advanced Computer Graphics Cutler 2 Plan Introduction Overview of the Semester Administrivia
Luxo Jr. CSCI-6962 Advanced Computer Graphics Pixar Animation Studios, 1986 Director: John Lasseter CSCI-6962 Advanced Computer Graphics Cutler 2 Plan Introduction Overview of the Semester Administrivia
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Non-line-of-sight imaging
 Non-line-of-sight imaging http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 23 Course announcements Homework 6 posted, due November 30 th. -
Non-line-of-sight imaging http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 23 Course announcements Homework 6 posted, due November 30 th. -
Computational Photography
 End of Semester is the last lecture of new material Quiz on Friday 4/30 Sample problems are posted on website Computational Photography Final Project Presentations Wednesday May 12 1-5pm, CII 4040 Attendance
End of Semester is the last lecture of new material Quiz on Friday 4/30 Sample problems are posted on website Computational Photography Final Project Presentations Wednesday May 12 1-5pm, CII 4040 Attendance
Video Mosaics for Virtual Environments, R. Szeliski. Review by: Christopher Rasmussen
 Video Mosaics for Virtual Environments, R. Szeliski Review by: Christopher Rasmussen September 19, 2002 Announcements Homework due by midnight Next homework will be assigned Tuesday, due following Tuesday.
Video Mosaics for Virtual Environments, R. Szeliski Review by: Christopher Rasmussen September 19, 2002 Announcements Homework due by midnight Next homework will be assigned Tuesday, due following Tuesday.
Image-based Lighting
 Image-based Lighting 10/17/15 T2 Computational Photography Derek Hoiem, University of Illinois Many slides from Debevec, some from Efros Next week Derek away for ICCV (Venice) Zhizhong and Aditya will
Image-based Lighting 10/17/15 T2 Computational Photography Derek Hoiem, University of Illinois Many slides from Debevec, some from Efros Next week Derek away for ICCV (Venice) Zhizhong and Aditya will
Schedule. MIT Monte-Carlo Ray Tracing. Radiosity. Review of last week? Limitations of radiosity. Radiosity
 Schedule Review Session: Tuesday November 18 th, 7:30 pm, Room 2-136 bring lots of questions! MIT 6.837 Monte-Carlo Ray Tracing Quiz 2: Thursday November 20 th, in class (one weeks from today) MIT EECS
Schedule Review Session: Tuesday November 18 th, 7:30 pm, Room 2-136 bring lots of questions! MIT 6.837 Monte-Carlo Ray Tracing Quiz 2: Thursday November 20 th, in class (one weeks from today) MIT EECS
CS201 Computer Vision Lect 4 - Image Formation
 CS201 Computer Vision Lect 4 - Image Formation John Magee 9 September, 2014 Slides courtesy of Diane H. Theriault Question of the Day: Why is Computer Vision hard? Something to think about from our view
CS201 Computer Vision Lect 4 - Image Formation John Magee 9 September, 2014 Slides courtesy of Diane H. Theriault Question of the Day: Why is Computer Vision hard? Something to think about from our view
Today. Rendering algorithms. Rendering algorithms. Images. Images. Rendering Algorithms. Course overview Organization Introduction to ray tracing
 Today Rendering Algorithms Course overview Organization Introduction to ray tracing Spring 2010 Matthias Zwicker Universität Bern Rendering algorithms Problem statement Given computer representation of
Today Rendering Algorithms Course overview Organization Introduction to ray tracing Spring 2010 Matthias Zwicker Universität Bern Rendering algorithms Problem statement Given computer representation of
Today. Rendering algorithms. Rendering algorithms. Images. Images. Rendering Algorithms. Course overview Organization Introduction to ray tracing
 Today Rendering Algorithms Course overview Organization Introduction to ray tracing Spring 2009 Matthias Zwicker Universität Bern Rendering algorithms Problem statement Given computer representation of
Today Rendering Algorithms Course overview Organization Introduction to ray tracing Spring 2009 Matthias Zwicker Universität Bern Rendering algorithms Problem statement Given computer representation of
Applications: Sampling/Reconstruction. Sampling and Reconstruction of Visual Appearance. Motivation. Monte Carlo Path Tracing.
 Sampling and Reconstruction of Visual Appearance CSE 274 [Fall 2018], Lecture 5 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir Applications: Sampling/Reconstruction Monte Carlo Rendering (biggest application)
Sampling and Reconstruction of Visual Appearance CSE 274 [Fall 2018], Lecture 5 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir Applications: Sampling/Reconstruction Monte Carlo Rendering (biggest application)
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Projective Geometry and Camera Models
 Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
CS664 Lecture #18: Motion
 CS664 Lecture #18: Motion Announcements Most paper choices were fine Please be sure to email me for approval, if you haven t already This is intended to help you, especially with the final project Use
CS664 Lecture #18: Motion Announcements Most paper choices were fine Please be sure to email me for approval, if you haven t already This is intended to help you, especially with the final project Use
CS : Assignment 2 Real-Time / Image-Based Rendering
 CS 294-13: Assignment 2 Real-Time / Image-Based Rendering Ravi Ramamoorthi 1 Introduction In this assignment, you will implement some of the modern techniques for real-time and/or image-based rendering.
CS 294-13: Assignment 2 Real-Time / Image-Based Rendering Ravi Ramamoorthi 1 Introduction In this assignment, you will implement some of the modern techniques for real-time and/or image-based rendering.
Computer Vision. The image formation process
 Computer Vision The image formation process Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 The image
Computer Vision The image formation process Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 The image
Recovering illumination and texture using ratio images
 Recovering illumination and texture using ratio images Alejandro Troccoli atroccol@cscolumbiaedu Peter K Allen allen@cscolumbiaedu Department of Computer Science Columbia University, New York, NY Abstract
Recovering illumination and texture using ratio images Alejandro Troccoli atroccol@cscolumbiaedu Peter K Allen allen@cscolumbiaedu Department of Computer Science Columbia University, New York, NY Abstract
Image correspondences and structure from motion
 Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
CS354 Computer Graphics Ray Tracing. Qixing Huang Januray 24th 2017
 CS354 Computer Graphics Ray Tracing Qixing Huang Januray 24th 2017 Graphics Pipeline Elements of rendering Object Light Material Camera Geometric optics Modern theories of light treat it as both a wave
CS354 Computer Graphics Ray Tracing Qixing Huang Januray 24th 2017 Graphics Pipeline Elements of rendering Object Light Material Camera Geometric optics Modern theories of light treat it as both a wave
Lecture 20: Tracking. Tuesday, Nov 27
 Lecture 20: Tracking Tuesday, Nov 27 Paper reviews Thorough summary in your own words Main contribution Strengths? Weaknesses? How convincing are the experiments? Suggestions to improve them? Extensions?
Lecture 20: Tracking Tuesday, Nov 27 Paper reviews Thorough summary in your own words Main contribution Strengths? Weaknesses? How convincing are the experiments? Suggestions to improve them? Extensions?
Rendering Synthetic Objects into Real Scenes. based on [Debevec98]
![Rendering Synthetic Objects into Real Scenes. based on [Debevec98]](/thumbs/94/121105342.jpg "Rendering Synthetic Objects into Real Scenes. based on [Debevec98]") Rendering Synthetic Objects into Real Scenes based on [Debevec98] Compositing of synthetic objects Geometry consistency needed: geometric model of synthetic objects needed: (coarse) geometric model of
Rendering Synthetic Objects into Real Scenes based on [Debevec98] Compositing of synthetic objects Geometry consistency needed: geometric model of synthetic objects needed: (coarse) geometric model of
Skeleton Cube for Lighting Environment Estimation
 (MIRU2004) 2004 7 606 8501 E-mail: {takesi-t,maki,tm}@vision.kuee.kyoto-u.ac.jp 1) 2) Skeleton Cube for Lighting Environment Estimation Takeshi TAKAI, Atsuto MAKI, and Takashi MATSUYAMA Graduate School
(MIRU2004) 2004 7 606 8501 E-mail: {takesi-t,maki,tm}@vision.kuee.kyoto-u.ac.jp 1) 2) Skeleton Cube for Lighting Environment Estimation Takeshi TAKAI, Atsuto MAKI, and Takashi MATSUYAMA Graduate School
Photometric Stereo. Lighting and Photometric Stereo. Computer Vision I. Last lecture in a nutshell BRDF. CSE252A Lecture 7
 Lighting and Photometric Stereo Photometric Stereo HW will be on web later today CSE5A Lecture 7 Radiometry of thin lenses δa Last lecture in a nutshell δa δa'cosα δacos β δω = = ( z' / cosα ) ( z / cosα
Lighting and Photometric Stereo Photometric Stereo HW will be on web later today CSE5A Lecture 7 Radiometry of thin lenses δa Last lecture in a nutshell δa δa'cosα δacos β δω = = ( z' / cosα ) ( z / cosα
Luxo Jr. Plan. Team. Movies. Why Computer Graphics? Introduction to Computer Graphics. Pixar Animation Studios, 1986 Director: John Lasseter
 Luxo Jr 6.837 Introduction to Computer Graphics Pixar Animation Studios, 1986 Director: John Lasseter 2 Plan Introduction of the semester Administrivia Iterated Function Systems (fractals) 3 Team Lecturers
Luxo Jr 6.837 Introduction to Computer Graphics Pixar Animation Studios, 1986 Director: John Lasseter 2 Plan Introduction of the semester Administrivia Iterated Function Systems (fractals) 3 Team Lecturers
Image Processing 1 (IP1) Bildverarbeitung 1
 Bildverarbeitung 1") MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV (KOGS) Image Processing 1 (IP1) Bildverarbeitung 1 Lecture 20: Shape from Shading Winter Semester 2015/16 Slides: Prof. Bernd Neumann Slightly
MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV (KOGS) Image Processing 1 (IP1) Bildverarbeitung 1 Lecture 20: Shape from Shading Winter Semester 2015/16 Slides: Prof. Bernd Neumann Slightly
Image gradients and edges
 Image gradients and edges April 7 th, 2015 Yong Jae Lee UC Davis Announcements PS0 due this Friday Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
Image gradients and edges April 7 th, 2015 Yong Jae Lee UC Davis Announcements PS0 due this Friday Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies"
 ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
The Rendering Equation & Monte Carlo Ray Tracing
 Last Time? Local Illumination & Monte Carlo Ray Tracing BRDF Ideal Diffuse Reflectance Ideal Specular Reflectance The Phong Model Radiosity Equation/Matrix Calculating the Form Factors Aj Ai Reading for
Last Time? Local Illumination & Monte Carlo Ray Tracing BRDF Ideal Diffuse Reflectance Ideal Specular Reflectance The Phong Model Radiosity Equation/Matrix Calculating the Form Factors Aj Ai Reading for
CSE 167: Introduction to Computer Graphics. Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2013
 CSE 167: Introduction to Computer Graphics Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2013 Today Course organization Course overview 2 Course Staff Instructor Jürgen Schulze,
CSE 167: Introduction to Computer Graphics Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2013 Today Course organization Course overview 2 Course Staff Instructor Jürgen Schulze,
MIT Monte-Carlo Ray Tracing. MIT EECS 6.837, Cutler and Durand 1
 MIT 6.837 Monte-Carlo Ray Tracing MIT EECS 6.837, Cutler and Durand 1 Schedule Review Session: Tuesday November 18 th, 7:30 pm bring lots of questions! Quiz 2: Thursday November 20 th, in class (one weeks
MIT 6.837 Monte-Carlo Ray Tracing MIT EECS 6.837, Cutler and Durand 1 Schedule Review Session: Tuesday November 18 th, 7:30 pm bring lots of questions! Quiz 2: Thursday November 20 th, in class (one weeks
What is Computer Vision? Introduction. We all make mistakes. Why is this hard? What was happening. What do you see? Intro Computer Vision
 What is Computer Vision? Trucco and Verri (Text): Computing properties of the 3-D world from one or more digital images Introduction Introduction to Computer Vision CSE 152 Lecture 1 Sockman and Shapiro:
What is Computer Vision? Trucco and Verri (Text): Computing properties of the 3-D world from one or more digital images Introduction Introduction to Computer Vision CSE 152 Lecture 1 Sockman and Shapiro:
General course information
 General Instructor: B. Hyle Park (MSE 243 / Bourns B207, hylepark@engr.ucr.edu) Teaching assistant: Junchao Wang (MSE 217, jwang071@ucr.edu) Reader: Michael Xiong (MSE 217, zhehao.xiong@email.ucr.edu)
General Instructor: B. Hyle Park (MSE 243 / Bourns B207, hylepark@engr.ucr.edu) Teaching assistant: Junchao Wang (MSE 217, jwang071@ucr.edu) Reader: Michael Xiong (MSE 217, zhehao.xiong@email.ucr.edu)
CS 283: Assignment 3 Real-Time / Image-Based Rendering
 CS 283: Assignment 3 Real-Time / Image-Based Rendering Ravi Ramamoorthi 1 Introduction In this assignment, you will implement some of the modern techniques for real-time and/or image-based rendering. To
CS 283: Assignment 3 Real-Time / Image-Based Rendering Ravi Ramamoorthi 1 Introduction In this assignment, you will implement some of the modern techniques for real-time and/or image-based rendering. To
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
STA141C: Big Data & High Performance Statistical Computing
 STA141C: Big Data & High Performance Statistical Computing Lecture 0: Course information Cho-Jui Hsieh UC Davis April 3, 2018 Course Information Website: http://www.stat.ucdavis.edu/~chohsieh/teaching/
STA141C: Big Data & High Performance Statistical Computing Lecture 0: Course information Cho-Jui Hsieh UC Davis April 3, 2018 Course Information Website: http://www.stat.ucdavis.edu/~chohsieh/teaching/
Single-view 3D Reconstruction
 Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Linear Algebra Review
 CS 1674: Intro to Computer Vision Linear Algebra Review Prof. Adriana Kovashka University of Pittsburgh January 11, 2018 What are images? (in Matlab) Matlab treats images as matrices of numbers To proceed,
CS 1674: Intro to Computer Vision Linear Algebra Review Prof. Adriana Kovashka University of Pittsburgh January 11, 2018 What are images? (in Matlab) Matlab treats images as matrices of numbers To proceed,
Photometric Stereo. Photometric Stereo. Shading reveals 3-D surface geometry BRDF. HW3 is assigned. An example of photometric stereo
 Photometric Stereo Photometric Stereo HW3 is assigned Introduction to Computer Vision CSE5 Lecture 6 Shading reveals 3-D surface geometry Shape-from-shading: Use just one image to recover shape. Requires
Photometric Stereo Photometric Stereo HW3 is assigned Introduction to Computer Vision CSE5 Lecture 6 Shading reveals 3-D surface geometry Shape-from-shading: Use just one image to recover shape. Requires
Lecture 6: Edge Detection
 #1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
#1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
Traditional Image Generation. Reflectance Fields. The Light Field. The Light Field. The Light Field. The Light Field
 Traditional Image Generation Course 10 Realistic Materials in Computer Graphics Surfaces + BRDFs Reflectance Fields USC Institute for Creative Technologies Volumetric scattering, density fields, phase
Traditional Image Generation Course 10 Realistic Materials in Computer Graphics Surfaces + BRDFs Reflectance Fields USC Institute for Creative Technologies Volumetric scattering, density fields, phase
Announcements. Radiometry and Sources, Shadows, and Shading
 Announcements Radiometry and Sources, Shadows, and Shading CSE 252A Lecture 6 Instructor office hours This week only: Thursday, 3:45 PM-4:45 PM Tuesdays 6:30 PM-7:30 PM Library (for now) Homework 1 is
Announcements Radiometry and Sources, Shadows, and Shading CSE 252A Lecture 6 Instructor office hours This week only: Thursday, 3:45 PM-4:45 PM Tuesdays 6:30 PM-7:30 PM Library (for now) Homework 1 is
Image transformations. Prof. Noah Snavely CS Administrivia
 Image transformations Prof. Noah Snavely CS1114 http://www.cs.cornell.edu/courses/cs1114/ Administrivia 2 Last time: Interpolation 3 Nearest neighbor interpolation 4 Bilinear interpolation 5 Bicubic interpolation
Image transformations Prof. Noah Snavely CS1114 http://www.cs.cornell.edu/courses/cs1114/ Administrivia 2 Last time: Interpolation 3 Nearest neighbor interpolation 4 Bilinear interpolation 5 Bicubic interpolation
Radiometric Compensation using Stratified Inverses
 Radiometric Compensation using Stratified Inverses Tian-Tsong Ng, Ramanpreet S. Pahwa, Jiamin Bai, Tony Q.S. Quek Institute for Infocomm Research Singapore {ttng,rspahwa,jbai,qsquek}@i2r.a-star.edu.sg
Radiometric Compensation using Stratified Inverses Tian-Tsong Ng, Ramanpreet S. Pahwa, Jiamin Bai, Tony Q.S. Quek Institute for Infocomm Research Singapore {ttng,rspahwa,jbai,qsquek}@i2r.a-star.edu.sg
Stereo Wrap + Motion. Computer Vision I. CSE252A Lecture 17
 Stereo Wrap + Motion CSE252A Lecture 17 Some Issues Ambiguity Window size Window shape Lighting Half occluded regions Problem of Occlusion Stereo Constraints CONSTRAINT BRIEF DESCRIPTION 1-D Epipolar Search
Stereo Wrap + Motion CSE252A Lecture 17 Some Issues Ambiguity Window size Window shape Lighting Half occluded regions Problem of Occlusion Stereo Constraints CONSTRAINT BRIEF DESCRIPTION 1-D Epipolar Search