3D model-based human modeling and tracking
|
|
|
- Winfred Parsons
- 6 years ago
- Views:
Transcription
1 3D model-based human modeling and tracking André Gagalowicz Projet MIRAGES INRIA - Rocquencourt - Domaine de Voluceau Le Chesnay Cedex Andre.Gagalowicz@inria.fr
2 FORMER APPROACH 2
3 Golf-Stream Research Project Started: June 2002 Duration: 33 months. Grant: RIAM: Centre National du Cinéma, Ministère de l industrie. Partners: INRIA (Institut National de Recherche Informatique et Automatique) FFG (Fédération Française de Golf) PGA-France (Professional Golfers Association) SYMAH VISION (Lagardere Group): coordinator 3

4 Existing Systems for Swing Analysis Motion Capture (Vicon, Motion Analysis): Motions analysis from optical capture. Reflecting Markers are automatically segmented and tracked using stroboscopic lights. Limitations: - Weakness of marker tracking, - Sliding of markers on the body - Indoor environment only - ->Not in Real Conditions (even Psychologically) 4

 Gavrila &")

5 State of the Art of 3D Human Motion Analysis Image Analysis (mono or multi cameras) Gavrila & Al. I. Mikic, M. Trivedi, R. Jain I. Kakadiaris & Al. P.Fua &Al. 5
6 Overview of the human body tracking (1) Golf-Stream Project 6
 3D")
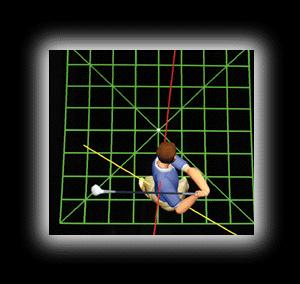
7 Overview of the human body tracking(2) 3D Tracking 7
8 Filming Conditions: - 7 Cameras are located on the fairway at a starting point. - - Shooting of the Trophée Lancôme tournement of the 4 first national champions, in almost real conditions. - Image rate: 50Hz (analysis of field) - Genlocked Cameras - Shutter: 1/500s (no blur on some body part) - Simultaneous meta-data recorded (3D ball distances, sportive comments, Ball trajectories, Impact sounds, Anthropometric measurements, ) 8



9 Filming Conditions: 9

. A simple pinhole camera model is used.")
10 Camera calibration: A 3D tool whose 3D geometry is known is used to make 2D/3D correspondances and to retreive the 3D camera parameters (extrinsics & Extrinsics). A simple pinhole camera model is used. 10

11 Design of a 3D puppet (1) Generic Mesh - Use of a standard human 3D mesh, corresponding to standard human morphology. 11
 - 22 measures are necessary to preadjust our generic puppet to a specific human body.")
12 Design of a 3D puppet (2) Anthropometric adjustment - Stastistical 3D human body adjustment according to the Ergoman study (L.A.A) - 22 measures are necessary to preadjust our generic puppet to a specific human body. 12
 Image")



13 Design of a 3D puppet (3) Image Refinement - Several static positions are used to refine the pre-adjusted puppet to the champion to track. 13
 3D skeleton -")


 - - Easier")
14 Design of a 3D puppet (4) 3D skeleton - Anatomical skeleton design: - - Better approximation of the real human anatomy (biomechanic constraints) - - Easier Skinning - - Better pivot location 14


15 Design of a 3D puppet (5) Animating a 3D puppet - Skin mesh deformation is related to bones motions, using a skinning function. - Parametric puppet. 15


16 Tracking (1) Pre-positionning a 3D puppet on the 1 st image - Interactive ajustment of the 3D puppet on the 1 st image on each view. The implicit biomechanical contraints of the puppet helps the user to find a realistic posture. 16
, several textures might be stored for the")
17 - 3D mesh vertices are projected in each camera plane on the first frame. - These projections represent the texture coordinates in every views. - According to a criterion of good visibility of a polygon in a camera view (occlusion and dot product value between its normal and the camera optical axis), several textures might be stored for the same polygon -> PROBLEM: colorimetry consistency among time and space for the textures. Tracking (2) Texture Learning 17


18 Tracking (3) Matching Process between synthetic puppet and Images - To compute a matching error, the algorithm render as many synthetic images of the textured puppet as the number of available cameras. - The matching error is given by: 18
19 Tracking (4) Active DOF and Hierarchical Matching - - Tracking a human body using the synthetic puppet consists in retrieving the DOF values of the skeleton along time, using an interactive process that compare appearance of that puppet for each trial with the real images. - - Since the matching error cannot be evaluated analytically, Simulated Annealing is used to perform the minimization. - The search of the puppet posture at Image (t+1) is made using the known puppet pose at Image (t) as an input. 19
 have been or are currently tracked and only that part is matched with the real images.")
20 Tracking (5) Active DOF and Hierarchical Matching - Skeleton Hierarchical search (6 DOF for Pelvis: global position, 3 DOF for Spine, 2 for each Upper-Leg, ) Body skin appears only when the corresponding bone(s) have been or are currently tracked and only that part is matched with the real images. - Limitation of the parameter space by constraining the optimization (When the Simulated annealing is trying a not realistic position, the matching is not computed and a high value is return to avoid the optimiser to not try this parameter value again..) 20




21 Some mesurements obtained from swing tracking. 21
22 Future Works - Computing Tracking from the data set. - Make more tasks automatic: 3D puppet adjustments, prepositioning - Using these results to create a swing motion engine able to predict a new swing motion tracking. - Being able to track golfers wearing normal cloth (Next filming: Open de France tournament, June 2004). - Speed up the computation. - Adapt this method to other outdoor sports (athletics) and complex motions (dance). 22
23 Conclusion - We are currently developing a 3D tracking system using video cameras able to make outdoor motion capture without using markers. - A standard 3D human body and anthropometric measurements give the very first result of the morphology adaptation. - Further body adjustments are made using images. - After positioning the puppet on the first frame, the texture is learnt and a tracker will retrieve the position of the puppet in the rest of the sequence. 23
24 Modeling 3D humans from uncalibrated wide baseline views NEW APPROACH
25 Context of this research (the same!) A system for 3D-tracking of a golf swing We need a precise and truthful specific 3D model to work with for tracking Indeed, the quality of tracking results relies on the quality of the 3D model 25

26 Block diagram 26

27 The images used 27
28 The 3D generic model Made of about vertices facets 28


29 Block diagram 29

30 Calibration Made using POSIT and 3D characteristic points and their correspondents on images 30
31 Reconstruction From calibration, reconstruct the 3D characteristic points 31



32 Block diagram 32

33 RBF interpolation 33
34 34 RBF interpolation Apply: With: Indeed, we have f(p i )=r i For smoother results, we take s(r)=r Solved by linear algebra ) ( ) ( 1 å = - * = n i i p i p A p f s ú ú ú ú û ù ê ê ê ê ë é = ú ú ú ú û ù ê ê ê ê ë é ú ú ú ú û ù ê ê ê ê ë é n n n n n n r r r A A A p p p p p p p p p p p p M M M O M M O ) ( ) ( ) ( ) (... ) ( ) ( s s s s s s

35 Results 35



36 Block diagram 36
37 3D silhouette extraction From contour edges, we compute silhouette edges using the following algorithm: 37

38 Problem of 2D edge intersections 38
39 Problem of 2D edge intersections 39

40 Curve matching 40
41 3D deformation From 2D to 3D Apply RBF to interpolate 41

42 Block diagram 42 Customized 3D Human Model

43 Final results => Average reprojection error of less than 1 pixel. 43




44 Existing problems 44
 = N N å i= 1 if ( dist( p, p' ) > r) p = p' Q ( x, y, z) i Q 1 P P P Q2 Q 3 r =")
45 Model Adjustment ( Surface Smoothing) P( x, y, z) Î SpecificModel, r is a threshold Q ( x, y, z), i = 1,2,..., N is the neighbor vertices of i 1 P' ( x, y, z) = N N å i= 1 if ( dist( p, p' ) > r) p = p' Q ( x, y, z) i Q 1 P P P Q2 Q 3 r = average( dist( p i, pi 45 '))
46 Specific Model Adjustment (Surface Smoothing) r = average ( dist ( p i, p i ' )) Before smooth 46 After smooth
47 Model Adjustment (Slice Replacement) Cut every part of body into slices Precondition: for all human models, the shape of corresponding slices are similar Generic Model Specific Model 47
 Match every")


48 Model Adjustment (Slice Replacement) Match every pair of corresponding slices Overlap every corresponding slice Make the comparison Generic Model Specific Model 48
49 Model Adjustment (Slice Replacement) All the distorted slices are marked in blue Generic Model Specific Model 49
50 Specific Model Adjustment (Slice Replacement) Scaling Replacement Before replacement 50 After replacement
 Before replacement After")
51 Specific Model Adjustment (Slice Replacement) Before replacement After replacement 51
52 Model Adjustment (Detail Replacement) Precondition: the surface shapes between generic and specific model are similar Try to locate the distorted patches by compare the normal of neighbor patches P ÎGenericModel, P' Î SpecificModel V i ( i = 1,2,..., N) is the normal of neighbor patch of P V ' i ( i = 1,2,..., N) is the normal of neighbor patch of P' suspicious( P') = ï ì ' 1 MAX ( f( V i, V )) í > i ïî 0 otherwise r 52
53 Model Adjustment (Detail Replacement) Get the surrounding box Scaling replacement Iterative process 53
54 Model Adjustment (Detail Replacement) Before replacement After replacement 54
 looks more handsome")
55 Model Adjustment (Detail Replacement) The specific model (red one) looks more handsome 55



56 Reconstruction Result 56
57 Texture Mapping Parts of modeling, important for tracking Generate texture on the reconstructed 3D model surface Single VS multiple cameras Viewpoint-Independent Method 57
58 Texture Mapping for Multiple Cameras Viewpoint-Independent Algorithm 1) For each patch p i, do the following processing. 2) Compute the locally normal vector V lmn of patch p i. 3) For each camera c j, compute viewline vector V cj directing toward the centroid Of p i. 4) Select such camera c* that the angle between V lmn and V cj becomes minimum. 5) Extract the texture of p i from the image captured by camera c*. 58

59 Mapping with One Camera 59

60 Mapping with Two Cameras 60
61 Mapping with Six Cameras 61
62 Vertex Blending y = deformed vector position of vertex b = number of bones w n = scalar weight of vertex to bone n x n = original vector position of vertex relative to bone n M n = transform matrix of bone n v y b 1 - = å n= 0 ( w n * v x n M n ) 62


63 63

64 Texture mapping result 64
65 Skeleton Estimation Use features & limb deformation vectors. RBF interpolation. Generic skeleton à Estimated subject s skeleton 65
66 Generic skeleton reconstructed one (face) 66
67 Generic skeleton reconstructed one (side view) 67

68 Results (continued) 68

69 More Results 69

70 Automatic pre-positioning 70
71 3D Motion Tracking 71
72 Human Motion Capture Process Model-based tracking using analysis-by-synthesis. Do NOT rely image segmentation, which is very ill-posed 72
73 3D Model Illustration : Kinematics chain and colour labelling of the human arm parts 73


74 Pre-positioning of arms - before tracking Pre-positioning using 3D software e.g. 3DS Max to do manual adjustment 74
75 Motion Tracking Algorithm 75
76 Synthesize to Search for Correct Posture Numerical minimization as kernel Kinematics of the joints drive the external skin which in turn produce the visual appearance i.e. the posture that we see. Match the synthesize image with the real image. Matching error is feedback & use for synthesize the next search candidate for searching iterative. 76
77 Numerical Optimization Gradient-based e.g. Newton, Levenberg- Marquardt, steepest-decent: less iterations, but converge to local minima. Not applicable here!!) Simulated annealing global minimization, but take more iterations. Particle filter. We chose simulated annealing with simplex search. 77
78 Error Function : Image differences 78

79 Generating the human pose for matching 79
80 Minimize Hierarchically Minimize hierarchically, on different body parts. Rigid body part deformation. Deal with occlusion by minimizing from most visible part first. 80
81 Implementation In C++. Running on Intel Pentium 4 and NVidia 6600 (AGPx8 bus). Maximum of 2 synchronized off-the-shelf cameras. Hardware acceleration using GPU, with the aid of 3D graphics engine Wildmagic. Hardware acceleration needed for 3D graphical rendering!! 81
82 Results See videos Arms tracking: Simple Tracking Cluttered Occlusion Outdoor One frame takes about 8-10 second to computing the tracking result offline. Bottleneck in the transferring of data from GPU to CPU 82
83 SIMPLE TRACKING 83

84 CLUTTERED ENVIRONMENT 84

85 OCCLUSION 85

86 OUTDOOR SCENE 86
87 Results - Comparing accuracy of Automatic Tracking vs Manually Clicked TrackedResult ClickedResult Angle of rotation (degrees) Time Sample (seconds) 87
88 Conclusions Construct 3D human model (with skeleton) from wide base-line images. Camera calibration and 3D reconstruction at the same time from feature points. Refine the feature reconstruction by matching of silhouettes. Model-based tracking of human arms to obtain kinematics of the movement. 88
89 Future Work Extensive validation. Extension to full-body tracking. Take deformable skin into consideration i.e. non-rigid body parts such as twisting of forearm. Automatic pre-positioning of posture. Multiple subject tracking. Computational efficiencies. 89
90 ? Any?? Questions? 90
3D model-based human face modeling
 3D model-based human face modeling André Gagalowicz Projet MIRAGES INRIA - Rocquencourt - Domaine de Voluceau 78153 Le Chesnay Cedex E-Mail : Andre.Gagalowicz@inria.fr II-I - INTRODUCTION II-II FIRST STEP
3D model-based human face modeling André Gagalowicz Projet MIRAGES INRIA - Rocquencourt - Domaine de Voluceau 78153 Le Chesnay Cedex E-Mail : Andre.Gagalowicz@inria.fr II-I - INTRODUCTION II-II FIRST STEP
PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO
 Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
CSE452 Computer Graphics
 CSE452 Computer Graphics Lecture 19: From Morphing To Animation Capturing and Animating Skin Deformation in Human Motion, Park and Hodgins, SIGGRAPH 2006 CSE452 Lecture 19: From Morphing to Animation 1
CSE452 Computer Graphics Lecture 19: From Morphing To Animation Capturing and Animating Skin Deformation in Human Motion, Park and Hodgins, SIGGRAPH 2006 CSE452 Lecture 19: From Morphing to Animation 1
Automatic Generation of Animatable 3D Personalized Model Based on Multi-view Images
 Automatic Generation of Animatable 3D Personalized Model Based on Multi-view Images Seong-Jae Lim, Ho-Won Kim, Jin Sung Choi CG Team, Contents Division ETRI Daejeon, South Korea sjlim@etri.re.kr Bon-Ki
Automatic Generation of Animatable 3D Personalized Model Based on Multi-view Images Seong-Jae Lim, Ho-Won Kim, Jin Sung Choi CG Team, Contents Division ETRI Daejeon, South Korea sjlim@etri.re.kr Bon-Ki
3D Modeling of Humans with Skeletons from Uncalibrated Wide Baseline Views
 3D Modeling of Humans with Skeletons from Uncalibrated Wide Baseline Views Chee Kwang Quah, Andre Gagalowicz 2, Richard Roussel 2, and Hock Soon Seah 3 Nanyang Technological University, School of Computer
3D Modeling of Humans with Skeletons from Uncalibrated Wide Baseline Views Chee Kwang Quah, Andre Gagalowicz 2, Richard Roussel 2, and Hock Soon Seah 3 Nanyang Technological University, School of Computer
animation projects in digital art animation 2009 fabio pellacini 1
 animation projects in digital art animation 2009 fabio pellacini 1 animation shape specification as a function of time projects in digital art animation 2009 fabio pellacini 2 how animation works? flip
animation projects in digital art animation 2009 fabio pellacini 1 animation shape specification as a function of time projects in digital art animation 2009 fabio pellacini 2 how animation works? flip
Animations. Hakan Bilen University of Edinburgh. Computer Graphics Fall Some slides are courtesy of Steve Marschner and Kavita Bala
 Animations Hakan Bilen University of Edinburgh Computer Graphics Fall 2017 Some slides are courtesy of Steve Marschner and Kavita Bala Animation Artistic process What are animators trying to do? What tools
Animations Hakan Bilen University of Edinburgh Computer Graphics Fall 2017 Some slides are courtesy of Steve Marschner and Kavita Bala Animation Artistic process What are animators trying to do? What tools
Game Programming. Bing-Yu Chen National Taiwan University
 Game Programming Bing-Yu Chen National Taiwan University Character Motion Hierarchical Modeling Character Animation Motion Editing 1 Hierarchical Modeling Connected primitives 2 3D Example: A robot arm
Game Programming Bing-Yu Chen National Taiwan University Character Motion Hierarchical Modeling Character Animation Motion Editing 1 Hierarchical Modeling Connected primitives 2 3D Example: A robot arm
Animation. CS 465 Lecture 22
 Animation CS 465 Lecture 22 Animation Industry production process leading up to animation What animation is How animation works (very generally) Artistic process of animation Further topics in how it works
Animation CS 465 Lecture 22 Animation Industry production process leading up to animation What animation is How animation works (very generally) Artistic process of animation Further topics in how it works
Dynamic Geometry Processing
 Dynamic Geometry Processing EG 2012 Tutorial Will Chang, Hao Li, Niloy Mitra, Mark Pauly, Michael Wand Tutorial: Dynamic Geometry Processing 1 Articulated Global Registration Introduction and Overview
Dynamic Geometry Processing EG 2012 Tutorial Will Chang, Hao Li, Niloy Mitra, Mark Pauly, Michael Wand Tutorial: Dynamic Geometry Processing 1 Articulated Global Registration Introduction and Overview
CMSC 425: Lecture 10 Skeletal Animation and Skinning
 CMSC 425: Lecture 10 Skeletal Animation and Skinning Reading: Chapt 11 of Gregory, Game Engine Architecture. Recap: Last time we introduced the principal elements of skeletal models and discussed forward
CMSC 425: Lecture 10 Skeletal Animation and Skinning Reading: Chapt 11 of Gregory, Game Engine Architecture. Recap: Last time we introduced the principal elements of skeletal models and discussed forward
Animation COM3404. Richard Everson. School of Engineering, Computer Science and Mathematics University of Exeter
 Animation COM3404 Richard Everson School of Engineering, Computer Science and Mathematics University of Exeter R.M.Everson@exeter.ac.uk http://www.secamlocal.ex.ac.uk/studyres/com304 Richard Everson Animation
Animation COM3404 Richard Everson School of Engineering, Computer Science and Mathematics University of Exeter R.M.Everson@exeter.ac.uk http://www.secamlocal.ex.ac.uk/studyres/com304 Richard Everson Animation
International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Vol. XXXIV-5/W10
 BUNDLE ADJUSTMENT FOR MARKERLESS BODY TRACKING IN MONOCULAR VIDEO SEQUENCES Ali Shahrokni, Vincent Lepetit, Pascal Fua Computer Vision Lab, Swiss Federal Institute of Technology (EPFL) ali.shahrokni,vincent.lepetit,pascal.fua@epfl.ch
BUNDLE ADJUSTMENT FOR MARKERLESS BODY TRACKING IN MONOCULAR VIDEO SEQUENCES Ali Shahrokni, Vincent Lepetit, Pascal Fua Computer Vision Lab, Swiss Federal Institute of Technology (EPFL) ali.shahrokni,vincent.lepetit,pascal.fua@epfl.ch
Thiruvarangan Ramaraj CS525 Graphics & Scientific Visualization Spring 2007, Presentation I, February 28 th 2007, 14:10 15:00. Topic (Research Paper):
:") Thiruvarangan Ramaraj CS525 Graphics & Scientific Visualization Spring 2007, Presentation I, February 28 th 2007, 14:10 15:00 Topic (Research Paper): Jinxian Chai and Jessica K. Hodgins, Performance Animation
Thiruvarangan Ramaraj CS525 Graphics & Scientific Visualization Spring 2007, Presentation I, February 28 th 2007, 14:10 15:00 Topic (Research Paper): Jinxian Chai and Jessica K. Hodgins, Performance Animation
CS 231. Inverse Kinematics Intro to Motion Capture. 3D characters. Representation. 1) Skeleton Origin (root) Joint centers/ bones lengths
 Skeleton Origin (root) Joint centers/ bones lengths") CS Inverse Kinematics Intro to Motion Capture Representation D characters ) Skeleton Origin (root) Joint centers/ bones lengths ) Keyframes Pos/Rot Root (x) Joint Angles (q) Kinematics study of static
CS Inverse Kinematics Intro to Motion Capture Representation D characters ) Skeleton Origin (root) Joint centers/ bones lengths ) Keyframes Pos/Rot Root (x) Joint Angles (q) Kinematics study of static
animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time
 animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time computer graphics animation 2009 fabio pellacini 2 animation representation many ways to
animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time computer graphics animation 2009 fabio pellacini 2 animation representation many ways to
animation computer graphics animation 2009 fabio pellacini 1
 animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time computer graphics animation 2009 fabio pellacini 2 animation representation many ways to
animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time computer graphics animation 2009 fabio pellacini 2 animation representation many ways to
Modeling 3D Human Poses from Uncalibrated Monocular Images
 Modeling 3D Human Poses from Uncalibrated Monocular Images Xiaolin K. Wei Texas A&M University xwei@cse.tamu.edu Jinxiang Chai Texas A&M University jchai@cse.tamu.edu Abstract This paper introduces an
Modeling 3D Human Poses from Uncalibrated Monocular Images Xiaolin K. Wei Texas A&M University xwei@cse.tamu.edu Jinxiang Chai Texas A&M University jchai@cse.tamu.edu Abstract This paper introduces an
Homework 2 Questions? Animation, Motion Capture, & Inverse Kinematics. Velocity Interpolation. Handing Free Surface with MAC
 Homework 2 Questions? Animation, Motion Capture, & Inverse Kinematics Velocity Interpolation Original image from Foster & Metaxas, 1996 In 2D: For each axis, find the 4 closest face velocity samples: Self-intersecting
Homework 2 Questions? Animation, Motion Capture, & Inverse Kinematics Velocity Interpolation Original image from Foster & Metaxas, 1996 In 2D: For each axis, find the 4 closest face velocity samples: Self-intersecting
Inverse Kinematics II and Motion Capture
 Mathematical Foundations of Computer Graphics and Vision Inverse Kinematics II and Motion Capture Luca Ballan Institute of Visual Computing Comparison 0 1 A B 2 C 3 Fake exponential map Real exponential
Mathematical Foundations of Computer Graphics and Vision Inverse Kinematics II and Motion Capture Luca Ballan Institute of Visual Computing Comparison 0 1 A B 2 C 3 Fake exponential map Real exponential
3/1/2010. Acceleration Techniques V1.2. Goals. Overview. Based on slides from Celine Loscos (v1.0)
") Acceleration Techniques V1.2 Anthony Steed Based on slides from Celine Loscos (v1.0) Goals Although processor can now deal with many polygons (millions), the size of the models for application keeps on
Acceleration Techniques V1.2 Anthony Steed Based on slides from Celine Loscos (v1.0) Goals Although processor can now deal with many polygons (millions), the size of the models for application keeps on
Direct Rendering of Trimmed NURBS Surfaces
 Direct Rendering of Trimmed NURBS Surfaces Hardware Graphics Pipeline 2/ 81 Hardware Graphics Pipeline GPU Video Memory CPU Vertex Processor Raster Unit Fragment Processor Render Target Screen Extended
Direct Rendering of Trimmed NURBS Surfaces Hardware Graphics Pipeline 2/ 81 Hardware Graphics Pipeline GPU Video Memory CPU Vertex Processor Raster Unit Fragment Processor Render Target Screen Extended
SM2231 :: 3D Animation I :: Basic. Rigging
 SM2231 :: 3D Animation I :: Basic Rigging Object arrangements Hierarchical Hierarchical Separate parts arranged in a hierarchy can be animated without a skeleton Flat Flat Flat hierarchy is usually preferred,
SM2231 :: 3D Animation I :: Basic Rigging Object arrangements Hierarchical Hierarchical Separate parts arranged in a hierarchy can be animated without a skeleton Flat Flat Flat hierarchy is usually preferred,
CS 231. Inverse Kinematics Intro to Motion Capture
 CS 231 Inverse Kinematics Intro to Motion Capture Representation 1) Skeleton Origin (root) Joint centers/ bones lengths 2) Keyframes Pos/Rot Root (x) Joint Angles (q) 3D characters Kinematics study of
CS 231 Inverse Kinematics Intro to Motion Capture Representation 1) Skeleton Origin (root) Joint centers/ bones lengths 2) Keyframes Pos/Rot Root (x) Joint Angles (q) 3D characters Kinematics study of
Last Time? Inverse Kinematics. Today. Keyframing. Physically-Based Animation. Procedural Animation
 Last Time? Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based Animation Forward and
Last Time? Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based Animation Forward and
Multi-View Stereo for Static and Dynamic Scenes
 Multi-View Stereo for Static and Dynamic Scenes Wolfgang Burgard Jan 6, 2010 Main references Yasutaka Furukawa and Jean Ponce, Accurate, Dense and Robust Multi-View Stereopsis, 2007 C.L. Zitnick, S.B.
Multi-View Stereo for Static and Dynamic Scenes Wolfgang Burgard Jan 6, 2010 Main references Yasutaka Furukawa and Jean Ponce, Accurate, Dense and Robust Multi-View Stereopsis, 2007 C.L. Zitnick, S.B.
Chapter 9 Animation System
 Chapter 9 Animation System 9.1 Types of Character Animation Cel Animation Cel animation is a specific type of traditional animation. A cel is a transparent sheet of plastic on which images can be painted
Chapter 9 Animation System 9.1 Types of Character Animation Cel Animation Cel animation is a specific type of traditional animation. A cel is a transparent sheet of plastic on which images can be painted
Video based Animation Synthesis with the Essential Graph. Adnane Boukhayma, Edmond Boyer MORPHEO INRIA Grenoble Rhône-Alpes
 Video based Animation Synthesis with the Essential Graph Adnane Boukhayma, Edmond Boyer MORPHEO INRIA Grenoble Rhône-Alpes Goal Given a set of 4D models, how to generate realistic motion from user specified
Video based Animation Synthesis with the Essential Graph Adnane Boukhayma, Edmond Boyer MORPHEO INRIA Grenoble Rhône-Alpes Goal Given a set of 4D models, how to generate realistic motion from user specified
MODELING AND HIERARCHY
 MODELING AND HIERARCHY Introduction Models are abstractions of the world both of the real world in which we live and of virtual worlds that we create with computers. We are all familiar with mathematical
MODELING AND HIERARCHY Introduction Models are abstractions of the world both of the real world in which we live and of virtual worlds that we create with computers. We are all familiar with mathematical
Images from 3D Creative Magazine. 3D Modelling Systems
 Images from 3D Creative Magazine 3D Modelling Systems Contents Reference & Accuracy 3D Primitives Transforms Move (Translate) Rotate Scale Mirror Align 3D Booleans Deforms Bend Taper Skew Twist Squash
Images from 3D Creative Magazine 3D Modelling Systems Contents Reference & Accuracy 3D Primitives Transforms Move (Translate) Rotate Scale Mirror Align 3D Booleans Deforms Bend Taper Skew Twist Squash
Face Tracking. Synonyms. Definition. Main Body Text. Amit K. Roy-Chowdhury and Yilei Xu. Facial Motion Estimation
 Face Tracking Amit K. Roy-Chowdhury and Yilei Xu Department of Electrical Engineering, University of California, Riverside, CA 92521, USA {amitrc,yxu}@ee.ucr.edu Synonyms Facial Motion Estimation Definition
Face Tracking Amit K. Roy-Chowdhury and Yilei Xu Department of Electrical Engineering, University of California, Riverside, CA 92521, USA {amitrc,yxu}@ee.ucr.edu Synonyms Facial Motion Estimation Definition
Shape modeling Modeling technique Shape representation! 3D Graphics Modeling Techniques
 D Graphics http://chamilo2.grenet.fr/inp/courses/ensimag4mmgd6/ Shape Modeling technique Shape representation! Part : Basic techniques. Projective rendering pipeline 2. Procedural Modeling techniques Shape
D Graphics http://chamilo2.grenet.fr/inp/courses/ensimag4mmgd6/ Shape Modeling technique Shape representation! Part : Basic techniques. Projective rendering pipeline 2. Procedural Modeling techniques Shape
3D Modeling for Capturing Human Motion from Monocular Video
 3D Modeling for Capturing Human Motion from Monocular Video 1 Weilun Lao, 1 Jungong Han 1,2 Peter H.N. de With 1 Eindhoven University of Technology 2 LogicaCMG Netherlands P.O. Box 513 P.O. Box 7089 5600MB
3D Modeling for Capturing Human Motion from Monocular Video 1 Weilun Lao, 1 Jungong Han 1,2 Peter H.N. de With 1 Eindhoven University of Technology 2 LogicaCMG Netherlands P.O. Box 513 P.O. Box 7089 5600MB
Animation II: Soft Object Animation. Watt and Watt Ch.17
 Animation II: Soft Object Animation Watt and Watt Ch.17 Soft Object Animation Animation I: skeletal animation forward kinematics x=f(φ) inverse kinematics φ=f -1 (x) Curves and Surfaces I&II: parametric
Animation II: Soft Object Animation Watt and Watt Ch.17 Soft Object Animation Animation I: skeletal animation forward kinematics x=f(φ) inverse kinematics φ=f -1 (x) Curves and Surfaces I&II: parametric
Body Trunk Shape Estimation from Silhouettes by Using Homologous Human Body Model
 Body Trunk Shape Estimation from Silhouettes by Using Homologous Human Body Model Shunta Saito* a, Makiko Kochi b, Masaaki Mochimaru b, Yoshimitsu Aoki a a Keio University, Yokohama, Kanagawa, Japan; b
Body Trunk Shape Estimation from Silhouettes by Using Homologous Human Body Model Shunta Saito* a, Makiko Kochi b, Masaaki Mochimaru b, Yoshimitsu Aoki a a Keio University, Yokohama, Kanagawa, Japan; b
Free-Form Deformation and Other Deformation Techniques
 Free-Form Deformation and Other Deformation Techniques Deformation Deformation Basic Definition Deformation: A transformation/mapping of the positions of every particle in the original object to those
Free-Form Deformation and Other Deformation Techniques Deformation Deformation Basic Definition Deformation: A transformation/mapping of the positions of every particle in the original object to those
Overview. Augmented reality and applications Marker-based augmented reality. Camera model. Binary markers Textured planar markers
 Augmented reality Overview Augmented reality and applications Marker-based augmented reality Binary markers Textured planar markers Camera model Homography Direct Linear Transformation What is augmented
Augmented reality Overview Augmented reality and applications Marker-based augmented reality Binary markers Textured planar markers Camera model Homography Direct Linear Transformation What is augmented
Last Time? Animation, Motion Capture, & Inverse Kinematics. Today. Keyframing. Physically-Based Animation. Procedural Animation
 Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
Announcements: Quiz. Animation, Motion Capture, & Inverse Kinematics. Last Time? Today: How do we Animate? Keyframing. Procedural Animation
 Announcements: Quiz Animation, Motion Capture, & Inverse Kinematics On Friday (3/1), in class One 8.5x11 sheet of notes allowed Sample quiz (from a previous year) on website Focus on reading comprehension
Announcements: Quiz Animation, Motion Capture, & Inverse Kinematics On Friday (3/1), in class One 8.5x11 sheet of notes allowed Sample quiz (from a previous year) on website Focus on reading comprehension
MOTION CAPTURE DATA PROCESSING - MOTION EDITING / RETARGETING - MOTION CONTROL / GRAPH - INVERSE KINEMATIC. Alexandre Meyer Master Informatique
 1 MOTION CAPTURE DATA PROCESSING - MOTION EDITING / RETARGETING - MOTION CONTROL / GRAPH - INVERSE KINEMATIC Alexandre Meyer Master Informatique Overview: Motion data processing In this course Motion editing
1 MOTION CAPTURE DATA PROCESSING - MOTION EDITING / RETARGETING - MOTION CONTROL / GRAPH - INVERSE KINEMATIC Alexandre Meyer Master Informatique Overview: Motion data processing In this course Motion editing
Kinematics & Motion Capture
 Lecture 27: Kinematics & Motion Capture Computer Graphics and Imaging UC Berkeley CS184/284A, Spring 2017 Forward Kinematics (Slides with James O Brien) Forward Kinematics Articulated skeleton Topology
Lecture 27: Kinematics & Motion Capture Computer Graphics and Imaging UC Berkeley CS184/284A, Spring 2017 Forward Kinematics (Slides with James O Brien) Forward Kinematics Articulated skeleton Topology
Last Time? Animation, Motion Capture, & Inverse Kinematics. Today. Keyframing. Physically-Based Animation. Procedural Animation
 Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
Animation of 3D surfaces
 Animation of 3D surfaces 2013-14 Motivations When character animation is controlled by skeleton set of hierarchical joints joints oriented by rotations the character shape still needs to be visible: visible
Animation of 3D surfaces 2013-14 Motivations When character animation is controlled by skeleton set of hierarchical joints joints oriented by rotations the character shape still needs to be visible: visible
Rigging / Skinning. based on Taku Komura, Jehee Lee and Charles B.Own's slides
 Rigging / Skinning based on Taku Komura, Jehee Lee and Charles B.Own's slides Skeletal Animation Victoria 2 CSE 872 Dr. Charles B. Owen Advanced Computer Graphics Skinning http://www.youtube.com/watch?
Rigging / Skinning based on Taku Komura, Jehee Lee and Charles B.Own's slides Skeletal Animation Victoria 2 CSE 872 Dr. Charles B. Owen Advanced Computer Graphics Skinning http://www.youtube.com/watch?
This week. CENG 732 Computer Animation. Warping an Object. Warping an Object. 2D Grid Deformation. Warping an Object.
 CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
Beginners Guide Maya. To be used next to Learning Maya 5 Foundation. 15 juni 2005 Clara Coepijn Raoul Franker
 Beginners Guide Maya To be used next to Learning Maya 5 Foundation 15 juni 2005 Clara Coepijn 0928283 Raoul Franker 1202596 Index Index 1 Introduction 2 The Interface 3 Main Shortcuts 4 Building a Character
Beginners Guide Maya To be used next to Learning Maya 5 Foundation 15 juni 2005 Clara Coepijn 0928283 Raoul Franker 1202596 Index Index 1 Introduction 2 The Interface 3 Main Shortcuts 4 Building a Character
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Interactive Computer Graphics
 Interactive Computer Graphics Lecture 18 Kinematics and Animation Interactive Graphics Lecture 18: Slide 1 Animation of 3D models In the early days physical models were altered frame by frame to create
Interactive Computer Graphics Lecture 18 Kinematics and Animation Interactive Graphics Lecture 18: Slide 1 Animation of 3D models In the early days physical models were altered frame by frame to create
Computer Animation. Algorithms and Techniques. z< MORGAN KAUFMANN PUBLISHERS. Rick Parent Ohio State University AN IMPRINT OF ELSEVIER SCIENCE
 Computer Animation Algorithms and Techniques Rick Parent Ohio State University z< MORGAN KAUFMANN PUBLISHERS AN IMPRINT OF ELSEVIER SCIENCE AMSTERDAM BOSTON LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO
Computer Animation Algorithms and Techniques Rick Parent Ohio State University z< MORGAN KAUFMANN PUBLISHERS AN IMPRINT OF ELSEVIER SCIENCE AMSTERDAM BOSTON LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO
TOWARDS A MODEL-BASED 3D MARKER-LESS HUMAN MOTION CAPTURE
 TOWARDS A MODEL-BASED 3D MARKER-LESS HUMAN MOTION CAPTURE QUAH CHEE KWANG School of Computer Engineering A thesis submitted to the Nanyang Technological University in fulfillment of the requirement for
TOWARDS A MODEL-BASED 3D MARKER-LESS HUMAN MOTION CAPTURE QUAH CHEE KWANG School of Computer Engineering A thesis submitted to the Nanyang Technological University in fulfillment of the requirement for
Human body animation. Computer Animation. Human Body Animation. Skeletal Animation
 Computer Animation Aitor Rovira March 2010 Human body animation Based on slides by Marco Gillies Human Body Animation Skeletal Animation Skeletal Animation (FK, IK) Motion Capture Motion Editing (retargeting,
Computer Animation Aitor Rovira March 2010 Human body animation Based on slides by Marco Gillies Human Body Animation Skeletal Animation Skeletal Animation (FK, IK) Motion Capture Motion Editing (retargeting,
Introduction to Computer Graphics. Animation (1) May 19, 2016 Kenshi Takayama
 May 19, 2016 Kenshi Takayama") Introduction to Computer Graphics Animation (1) May 19, 2016 Kenshi Takayama Skeleton-based animation Simple Intuitive Low comp. cost https://www.youtube.com/watch?v=dsonab58qva 2 Representing a pose using
Introduction to Computer Graphics Animation (1) May 19, 2016 Kenshi Takayama Skeleton-based animation Simple Intuitive Low comp. cost https://www.youtube.com/watch?v=dsonab58qva 2 Representing a pose using
Online Interactive 4D Character Animation
 Online Interactive 4D Character Animation Marco Volino, Peng Huang and Adrian Hilton Web3D 2015 Outline 4D Performance Capture - 3D Reconstruction, Alignment, Texture Maps Animation - Parametric Motion
Online Interactive 4D Character Animation Marco Volino, Peng Huang and Adrian Hilton Web3D 2015 Outline 4D Performance Capture - 3D Reconstruction, Alignment, Texture Maps Animation - Parametric Motion
Course Review. Computer Animation and Visualisation. Taku Komura
 Course Review Computer Animation and Visualisation Taku Komura Characters include Human models Virtual characters Animal models Representation of postures The body has a hierarchical structure Many types
Course Review Computer Animation and Visualisation Taku Komura Characters include Human models Virtual characters Animal models Representation of postures The body has a hierarchical structure Many types
CS 231. Deformation simulation (and faces)
") CS 231 Deformation simulation (and faces) Deformation BODY Simulation Discretization Spring-mass models difficult to model continuum properties Simple & fast to implement and understand Finite Element
CS 231 Deformation simulation (and faces) Deformation BODY Simulation Discretization Spring-mass models difficult to model continuum properties Simple & fast to implement and understand Finite Element
AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO F ^ k.^
 Computer a jap Animation Algorithms and Techniques Second Edition Rick Parent Ohio State University AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO
Computer a jap Animation Algorithms and Techniques Second Edition Rick Parent Ohio State University AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO
Recap: Features and filters. Recap: Grouping & fitting. Now: Multiple views 10/29/2008. Epipolar geometry & stereo vision. Why multiple views?
 Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Human Upper Body Pose Estimation in Static Images
 1. Research Team Human Upper Body Pose Estimation in Static Images Project Leader: Graduate Students: Prof. Isaac Cohen, Computer Science Mun Wai Lee 2. Statement of Project Goals This goal of this project
1. Research Team Human Upper Body Pose Estimation in Static Images Project Leader: Graduate Students: Prof. Isaac Cohen, Computer Science Mun Wai Lee 2. Statement of Project Goals This goal of this project
Video-based Capturing and Rendering of People
 Video-based Capturing and Rendering of People Christian Theobalt 1, Marcus Magnor 2, and Hans-Peter Seidel 1 1 MPI Informatik, Saarbrücken, Germany, [theobalt,hpseidel]@mpi-inf.mpg.de, WWW home page: http://www.mpi-inf.mpg.de/
Video-based Capturing and Rendering of People Christian Theobalt 1, Marcus Magnor 2, and Hans-Peter Seidel 1 1 MPI Informatik, Saarbrücken, Germany, [theobalt,hpseidel]@mpi-inf.mpg.de, WWW home page: http://www.mpi-inf.mpg.de/
Motion Capture Passive markers and video-based techniques
 Motion Capture Passive markers and video-based techniques N. Alberto Borghese (AIS-Lab) Department of Computer Science University of Milano 1/46 Outline Passive Markers Technology. Low and high level processing.
Motion Capture Passive markers and video-based techniques N. Alberto Borghese (AIS-Lab) Department of Computer Science University of Milano 1/46 Outline Passive Markers Technology. Low and high level processing.
Input Nodes. Surface Input. Surface Input Nodal Motion Nodal Displacement Instance Generator Light Flocking
 Input Nodes Surface Input Nodal Motion Nodal Displacement Instance Generator Light Flocking The different Input nodes, where they can be found, what their outputs are. Surface Input When editing a surface,
Input Nodes Surface Input Nodal Motion Nodal Displacement Instance Generator Light Flocking The different Input nodes, where they can be found, what their outputs are. Surface Input When editing a surface,
Animation, Motion Capture, & Inverse Kinematics. Announcements: Quiz
 Animation, Motion Capture, & Inverse Kinematics Announcements: Quiz On Tuesday (3/10), in class One 8.5x11 sheet of notes allowed Sample quiz (from a previous year) on website Focus on reading comprehension
Animation, Motion Capture, & Inverse Kinematics Announcements: Quiz On Tuesday (3/10), in class One 8.5x11 sheet of notes allowed Sample quiz (from a previous year) on website Focus on reading comprehension
Simi Reality Motion Systems release their new Simi Motion 2012 System 8.5!
 Simi Reality Motion Systems release their new Simi Motion 2012 System 8.5! Simi is now releasing their new Simi Motion version 8.5.338 2012 after intensive development. The most important addition is the
Simi Reality Motion Systems release their new Simi Motion 2012 System 8.5! Simi is now releasing their new Simi Motion version 8.5.338 2012 after intensive development. The most important addition is the
Sculpting 3D Models. Glossary
 A Array An array clones copies of an object in a pattern, such as in rows and columns, or in a circle. Each object in an array can be transformed individually. Array Flyout Array flyout is available in
A Array An array clones copies of an object in a pattern, such as in rows and columns, or in a circle. Each object in an array can be transformed individually. Array Flyout Array flyout is available in
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Learning Autodesk Maya The Modeling & Animation Handbook. Free Models From Turbo Squid Value US $ Official Autodesk Training Guide
 Free Models From Turbo Squid Value US $239.00 Official Autodesk Training Guide Learning Autodesk Maya 2008 The Modeling & Animation Handbook A hands-on introduction to key tools and techniques in Autodesk
Free Models From Turbo Squid Value US $239.00 Official Autodesk Training Guide Learning Autodesk Maya 2008 The Modeling & Animation Handbook A hands-on introduction to key tools and techniques in Autodesk
CS 231. Basics of Computer Animation
 CS 231 Basics of Computer Animation Animation Techniques Keyframing Motion capture Physics models Keyframe animation Highest degree of control, also difficult Interpolation affects end result Timing must
CS 231 Basics of Computer Animation Animation Techniques Keyframing Motion capture Physics models Keyframe animation Highest degree of control, also difficult Interpolation affects end result Timing must
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Motion Control Methods for Skeleton Daniel Thalmann
 Motion Control Methods for Skeleton Daniel Thalmann Cagliari, May 2008 Animation of articulated bodies Characters, humans, animals, robots. Characterized by hierarchical structure: skeleton. Skeleton:
Motion Control Methods for Skeleton Daniel Thalmann Cagliari, May 2008 Animation of articulated bodies Characters, humans, animals, robots. Characterized by hierarchical structure: skeleton. Skeleton:
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
COMP 175 COMPUTER GRAPHICS. Lecture 10: Animation. COMP 175: Computer Graphics March 12, Erik Anderson 08 Animation
 Lecture 10: Animation COMP 175: Computer Graphics March 12, 2018 1/37 Recap on Camera and the GL Matrix Stack } Go over the GL Matrix Stack 2/37 Topics in Animation } Physics (dynamics, simulation, mechanics)
Lecture 10: Animation COMP 175: Computer Graphics March 12, 2018 1/37 Recap on Camera and the GL Matrix Stack } Go over the GL Matrix Stack 2/37 Topics in Animation } Physics (dynamics, simulation, mechanics)
Real-Time Universal Capture Facial Animation with GPU Skin Rendering
 Real-Time Universal Capture Facial Animation with GPU Skin Rendering Meng Yang mengyang@seas.upenn.edu PROJECT ABSTRACT The project implements the real-time skin rendering algorithm presented in [1], and
Real-Time Universal Capture Facial Animation with GPU Skin Rendering Meng Yang mengyang@seas.upenn.edu PROJECT ABSTRACT The project implements the real-time skin rendering algorithm presented in [1], and
Animation of 3D surfaces.
 Animation of 3D surfaces Motivations When character animation is controlled by skeleton set of hierarchical joints joints oriented by rotations the character shape still needs to be visible: visible =
Animation of 3D surfaces Motivations When character animation is controlled by skeleton set of hierarchical joints joints oriented by rotations the character shape still needs to be visible: visible =
Robot vision review. Martin Jagersand
 Robot vision review Martin Jagersand What is Computer Vision? Computer Graphics Three Related fields Image Processing: Changes 2D images into other 2D images Computer Graphics: Takes 3D models, renders
Robot vision review Martin Jagersand What is Computer Vision? Computer Graphics Three Related fields Image Processing: Changes 2D images into other 2D images Computer Graphics: Takes 3D models, renders
About this document. Introduction. Where does Life Forms fit? Prev Menu Next Back p. 2
 Prev Menu Next Back p. 2 About this document This document explains how to use Life Forms Studio with LightWave 5.5-6.5. It also contains short examples of how to use LightWave and Life Forms together.
Prev Menu Next Back p. 2 About this document This document explains how to use Life Forms Studio with LightWave 5.5-6.5. It also contains short examples of how to use LightWave and Life Forms together.
Capturing Skeleton-based Animation Data from a Video
 Capturing Skeleton-based Animation Data from a Video Liang-Yu Shih, Bing-Yu Chen National Taiwan University E-mail: xdd@cmlab.csie.ntu.edu.tw, robin@ntu.edu.tw ABSTRACT This paper presents a semi-automatic
Capturing Skeleton-based Animation Data from a Video Liang-Yu Shih, Bing-Yu Chen National Taiwan University E-mail: xdd@cmlab.csie.ntu.edu.tw, robin@ntu.edu.tw ABSTRACT This paper presents a semi-automatic
Applications. Systems. Motion capture pipeline. Biomechanical analysis. Graphics research
 Motion capture Applications Systems Motion capture pipeline Biomechanical analysis Graphics research Applications Computer animation Biomechanics Robotics Cinema Video games Anthropology What is captured?
Motion capture Applications Systems Motion capture pipeline Biomechanical analysis Graphics research Applications Computer animation Biomechanics Robotics Cinema Video games Anthropology What is captured?
Live Metric 3D Reconstruction on Mobile Phones ICCV 2013
 Live Metric 3D Reconstruction on Mobile Phones ICCV 2013 Main Contents 1. Target & Related Work 2. Main Features of This System 3. System Overview & Workflow 4. Detail of This System 5. Experiments 6.
Live Metric 3D Reconstruction on Mobile Phones ICCV 2013 Main Contents 1. Target & Related Work 2. Main Features of This System 3. System Overview & Workflow 4. Detail of This System 5. Experiments 6.
Multi-camera Tracking of Articulated Human Motion using Shape and Motion Cues
 IEEE TRANSACTIONS ON IMAGE PROCESSING 1 Multi-camera Tracking of Articulated Human Motion using Shape and Motion Cues Aravind Sundaresan, Student Member, IEEE, and Rama Chellappa, Fellow, IEEE Abstract
IEEE TRANSACTIONS ON IMAGE PROCESSING 1 Multi-camera Tracking of Articulated Human Motion using Shape and Motion Cues Aravind Sundaresan, Student Member, IEEE, and Rama Chellappa, Fellow, IEEE Abstract
HUMAN motion capture has been under investigation for many
 IEEE TRANSACTIONS ON VISUALIZATION AND COMPUTER GRAPHICS, VOL., NO., JANUARY 2015 1 Markerless Motion Capture with Multi-view Structured Light Ricardo R. Garcia, Student Member, IEEE, and Avideh Zakhor,
IEEE TRANSACTIONS ON VISUALIZATION AND COMPUTER GRAPHICS, VOL., NO., JANUARY 2015 1 Markerless Motion Capture with Multi-view Structured Light Ricardo R. Garcia, Student Member, IEEE, and Avideh Zakhor,
7 Modelling and Animating Human Figures. Chapter 7. Modelling and Animating Human Figures. Department of Computer Science and Engineering 7-1
 Modelling and Animating Human Figures 7-1 Introduction Modeling and animating an articulated figure is one of the most formidable tasks that an animator can be faced with. It is especially challenging
Modelling and Animating Human Figures 7-1 Introduction Modeling and animating an articulated figure is one of the most formidable tasks that an animator can be faced with. It is especially challenging
Animation. CS 4620 Lecture 33. Cornell CS4620 Fall Kavita Bala
 Animation CS 4620 Lecture 33 Cornell CS4620 Fall 2015 1 Announcements Grading A5 (and A6) on Monday after TG 4621: one-on-one sessions with TA this Friday w/ prior instructor Steve Marschner 2 Quaternions
Animation CS 4620 Lecture 33 Cornell CS4620 Fall 2015 1 Announcements Grading A5 (and A6) on Monday after TG 4621: one-on-one sessions with TA this Friday w/ prior instructor Steve Marschner 2 Quaternions
CS 231. Deformation simulation (and faces)
") CS 231 Deformation simulation (and faces) 1 Cloth Simulation deformable surface model Represent cloth model as a triangular or rectangular grid Points of finite mass as vertices Forces or energies of points
CS 231 Deformation simulation (and faces) 1 Cloth Simulation deformable surface model Represent cloth model as a triangular or rectangular grid Points of finite mass as vertices Forces or energies of points
Augmented Reality, Advanced SLAM, Applications
 Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
Multiview Stereo COSC450. Lecture 8
 Multiview Stereo COSC450 Lecture 8 Stereo Vision So Far Stereo and epipolar geometry Fundamental matrix captures geometry 8-point algorithm Essential matrix with calibrated cameras 5-point algorithm Intersect
Multiview Stereo COSC450 Lecture 8 Stereo Vision So Far Stereo and epipolar geometry Fundamental matrix captures geometry 8-point algorithm Essential matrix with calibrated cameras 5-point algorithm Intersect
A Statistical Consistency Check for the Space Carving Algorithm.
 A Statistical Consistency Check for the Space Carving Algorithm. A. Broadhurst and R. Cipolla Dept. of Engineering, Univ. of Cambridge, Cambridge, CB2 1PZ aeb29 cipolla @eng.cam.ac.uk Abstract This paper
A Statistical Consistency Check for the Space Carving Algorithm. A. Broadhurst and R. Cipolla Dept. of Engineering, Univ. of Cambridge, Cambridge, CB2 1PZ aeb29 cipolla @eng.cam.ac.uk Abstract This paper
Cloth Animation. CENG 732 Computer Animation. Simple Draping. Simple Draping. Simple Draping. Simple Draping
 Cloth Animation CENG 732 Computer Animation Cloth animation in Blender Cloth animation in Maya Spring 2006-2007 Week 9 Animating Cloth Motion Capture Draping will occur as a cloth is hanged from a fixed
Cloth Animation CENG 732 Computer Animation Cloth animation in Blender Cloth animation in Maya Spring 2006-2007 Week 9 Animating Cloth Motion Capture Draping will occur as a cloth is hanged from a fixed
Visual Tracking of Human Body with Deforming Motion and Shape Average
 Visual Tracking of Human Body with Deforming Motion and Shape Average Alessandro Bissacco UCLA Computer Science Los Angeles, CA 90095 bissacco@cs.ucla.edu UCLA CSD-TR # 020046 Abstract In this work we
Visual Tracking of Human Body with Deforming Motion and Shape Average Alessandro Bissacco UCLA Computer Science Los Angeles, CA 90095 bissacco@cs.ucla.edu UCLA CSD-TR # 020046 Abstract In this work we
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
CS354 Computer Graphics Character Animation and Skinning
 Slide Credit: Don Fussell CS354 Computer Graphics Character Animation and Skinning Qixing Huang April 9th 2018 Instance Transformation Start with a prototype object (a symbol) Each appearance of the object
Slide Credit: Don Fussell CS354 Computer Graphics Character Animation and Skinning Qixing Huang April 9th 2018 Instance Transformation Start with a prototype object (a symbol) Each appearance of the object
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Player Viewpoint Video Synthesis Using Multiple Cameras
 Player Viewpoint Video Synthesis Using Multiple Cameras Kenji Kimura *, Hideo Saito Department of Information and Computer Science Keio University, Yokohama, Japan * k-kimura@ozawa.ics.keio.ac.jp, saito@ozawa.ics.keio.ac.jp
Player Viewpoint Video Synthesis Using Multiple Cameras Kenji Kimura *, Hideo Saito Department of Information and Computer Science Keio University, Yokohama, Japan * k-kimura@ozawa.ics.keio.ac.jp, saito@ozawa.ics.keio.ac.jp
Image processing and features
 Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
A novel approach to motion tracking with wearable sensors based on Probabilistic Graphical Models
 A novel approach to motion tracking with wearable sensors based on Probabilistic Graphical Models Emanuele Ruffaldi Lorenzo Peppoloni Alessandro Filippeschi Carlo Alberto Avizzano 2014 IEEE International
A novel approach to motion tracking with wearable sensors based on Probabilistic Graphical Models Emanuele Ruffaldi Lorenzo Peppoloni Alessandro Filippeschi Carlo Alberto Avizzano 2014 IEEE International
Low Cost Motion Capture
 Low Cost Motion Capture R. Budiman M. Bennamoun D.Q. Huynh School of Computer Science and Software Engineering The University of Western Australia Crawley WA 6009 AUSTRALIA Email: budimr01@tartarus.uwa.edu.au,
Low Cost Motion Capture R. Budiman M. Bennamoun D.Q. Huynh School of Computer Science and Software Engineering The University of Western Australia Crawley WA 6009 AUSTRALIA Email: budimr01@tartarus.uwa.edu.au,
Animation Essentially a question of flipping between many still images, fast enough
 33(70) Information Coding / Computer Graphics, ISY, LiTH Animation Essentially a question of flipping between many still images, fast enough 33(70) Animation as a topic Page flipping, double-buffering
33(70) Information Coding / Computer Graphics, ISY, LiTH Animation Essentially a question of flipping between many still images, fast enough 33(70) Animation as a topic Page flipping, double-buffering
Articulated Pose Estimation with Flexible Mixtures-of-Parts
 Articulated Pose Estimation with Flexible Mixtures-of-Parts PRESENTATION: JESSE DAVIS CS 3710 VISUAL RECOGNITION Outline Modeling Special Cases Inferences Learning Experiments Problem and Relevance Problem:
Articulated Pose Estimation with Flexible Mixtures-of-Parts PRESENTATION: JESSE DAVIS CS 3710 VISUAL RECOGNITION Outline Modeling Special Cases Inferences Learning Experiments Problem and Relevance Problem:
Model-Based Reinforcement of Kinect Depth Data for Human Motion Capture Applications
 Sensors 2013, 13, 8835-8855; doi:10.3390/s130708835 OPEN ACCESS sensors ISSN 1424-8220 www.mdpi.com/journal/sensors Article Model-Based Reinforcement of Kinect Depth Data for Human Motion Capture Applications
Sensors 2013, 13, 8835-8855; doi:10.3390/s130708835 OPEN ACCESS sensors ISSN 1424-8220 www.mdpi.com/journal/sensors Article Model-Based Reinforcement of Kinect Depth Data for Human Motion Capture Applications
Computer Graphics Introduction. Taku Komura
 Computer Graphics Introduction Taku Komura What s this course all about? We will cover Graphics programming and algorithms Graphics data structures Applied geometry, modeling and rendering Not covering
Computer Graphics Introduction Taku Komura What s this course all about? We will cover Graphics programming and algorithms Graphics data structures Applied geometry, modeling and rendering Not covering
6.837 Introduction to Computer Graphics Final Exam Tuesday, December 20, :05-12pm Two hand-written sheet of notes (4 pages) allowed 1 SSD [ /17]
![6.837 Introduction to Computer Graphics Final Exam Tuesday, December 20, :05-12pm Two hand-written sheet of notes (4 pages) allowed 1 SSD [ /17]](/thumbs/87/95541269.jpg "6.837 Introduction to Computer Graphics Final Exam Tuesday, December 20, :05-12pm Two hand-written sheet of notes (4 pages) allowed 1 SSD [ /17]") 6.837 Introduction to Computer Graphics Final Exam Tuesday, December 20, 2011 9:05-12pm Two hand-written sheet of notes (4 pages) allowed NAME: 1 / 17 2 / 12 3 / 35 4 / 8 5 / 18 Total / 90 1 SSD [ /17]
6.837 Introduction to Computer Graphics Final Exam Tuesday, December 20, 2011 9:05-12pm Two hand-written sheet of notes (4 pages) allowed NAME: 1 / 17 2 / 12 3 / 35 4 / 8 5 / 18 Total / 90 1 SSD [ /17]