Mašinska vizija. Dr Nenad Jovičić tnt.etf.rs/~mv
|
|
|
- Barbara Lester
- 5 years ago
- Views:
Transcription
1 Mašinska vizija Dr Nenad Jovičić tnt.etf.rs/~mv
2 Linearne 2D geometrijske transformacije
3 2D geometrijske transformacije Pretpostavka: Objekti u 2D prostoru se sastoje iz tačaka i linija. Svaka tačka se definiše parom koordinata X=(x,y) ili se predstavlja vektorom: Geometrijska transformacija: Neka je (A,B) duž između tačaka A i B. Geometrijska transformacija T transformiše duž (A,B) u duž (A,B ) tako da važi A =TA i B =TB
4 Translacija
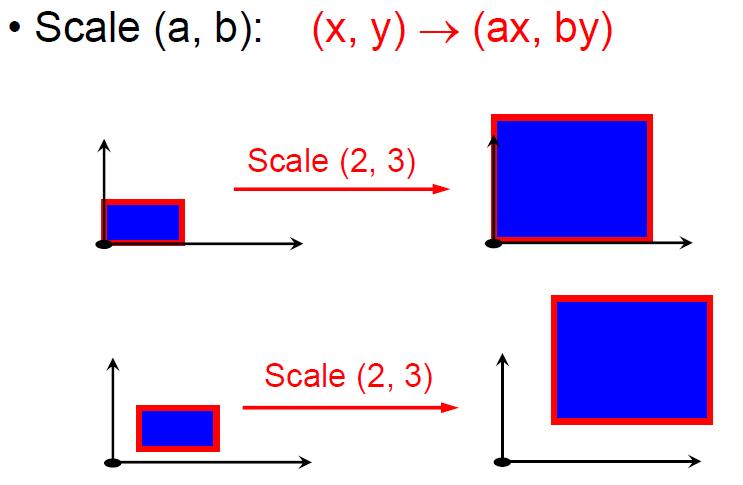
5 Skaliranje

6 Skaliranje? Kako da skaliram objekat a da mu ne pomerim koordinatni početak?
7 Rotacija
8 Rotacija? Kako da rotiram objekat oko proizvoljne tačke?
9 Matrični zapisa Svaku tačku u 2D prostoru mogu da predstavim kao vektor sa dve koordinate: Kako se vektor koji predstavlja tačku množi sa kvadratnom matricom veličine 2x2?
10 Transformacije kroz matrice Većina 2D geometrijskih trasformacija može da predstavim kao množenje vektora tačke sa 2x2 kvadratnom matricom:
11 Primeri Skaliranje Rotacija
12 Problem! Postoji jedna jednostavna i česta transformacija koja ne može da se predstavi množenjem sa matricom:
13 Rešenje: Homogene koordinate Mapiranje iz iz R n u Rn+1 Svakoj tački u 2D prostoru koja ima koordinate (x,y) dodeljuje se tačka u 3D prostoru kojoj se dodaje jedna fiktivna koordinata W. Koordinate 2D tačke se uvek mogu dobiti iz homogenih koordinata deljenjem sa trećom koordinatom: Konstanta t je proizvoljna tj. važi: (x,z,1)= (2x,2y,2)= (tx,ty,t).
14 Geomterijska interpretacija Geometrijski posmatrano par (x,y) definiše duž koja polazi is koordinatnog početka i prolazi kroz tačke (x,z,1), (2x,2y,2),... (tx,ty,t).
15 Translacija uz pomoć homogenih koordinata Translacija se uz pomoć homogenih koordinata može predstaviti kao množenje:
16 Rotacija oko proizvoljne ose
17 Rotacija oko proizvoljne ose
18 Linearne 2D geometrijske transformacije sa homogenim koordinatama
19 Translacija
20 Skaliranje
21 Rotacija
22 Euklidska (rigidna) transformacija
23 Skalirana Euklidska transformacija
24 Afina transformacija
25 Projektivna
26 Rezime

27 Camera Obscura Camera Obscura, Gemma Frisius, 1558
28 Model Pinhole kamere image plane y r ( x, y, z) optical axis effective focal length, f z x pinhole r' ( x', y', f ') r' f ' r z x' f ' x z y' f ' y z
29 Geometrija formiranja slike
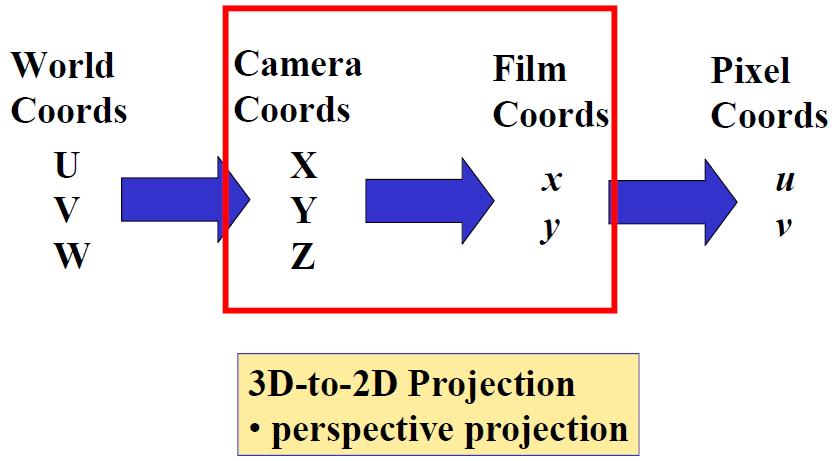
30 Forward projection Model prevođenja tačaka iz 3D sveta na 2D prostor koordinata piksela. Cilj: Svesti sve ove transformacije na matrične operacije.
31 Backword projekcija Model rekonstrukcije 3D scene na osnovu poznatih 2D koordinata projektovanih tačaka u koordinatnom sistemu kamere. Primer je stereovizija.
32 Forward projection Rigidne transformacije: translacija+rotacija
33 Transformacija iz koordinatnog sistema sveta u koordinatni sistem kamere Tačke Pc i Pw predstavljaju istu fizičku tačku ali u različitim koordinatnim sistemima.
34 Transformacija iz koordinatnog sistema sveta u koordinatni sistem kamere
35 Matrična forma homogene koordinate Zahvaljujući homogenim koordinatama sve se svodi na množenje matrica.
36 Matrična forma homogene koordinate
37 Stereo vizija
38 Stereo vizija
39 Forward projection
40 Osnovna perspektivna projekcija
41 Gubi se realna dimenzija dubine
42 Gubi se realna dimenzija dubine
43 Osnovna perspektivna projekcija Jednačine izvedene na osnovu sličnosti trouglova
44 Osnovna perspektivna projekcija Jednačine izvedene na osnovu sličnosti trouglova
45 Osnovna perspektivna projekcija Kako ovo predstaviti u matričnoj formi?
46 Matrična forma perspektivne projekcije
47 Forward projection

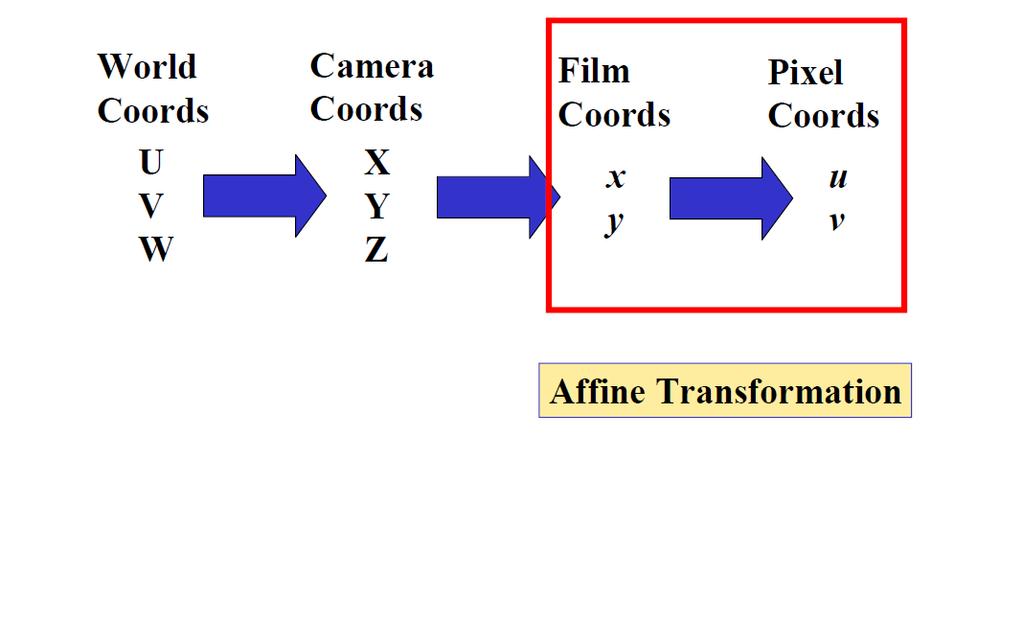
48 Intrinsic parametri Opisuju transformaciju iz koordinatnog sistema projektovane slike u koordinatni sistem senzora.
49 Skaliranje U opštem slučaju pikseli ne moraju da budu kvadratni i u tom slučaju definiše se aspect ratio= s y /s x - -
50 Ako nije sve idealno Transformacije iz ravni slike u ravan senzora
51 Zašto nije idealno?

52 Sve zajedno...
53 Sve zajedno...
x y = z Zadaci - procedure
 Zadaci - procedure Zad1. Data je kvadratna meta u koordinatnom sistemu sa koordinatama A(0,0), B(1,0), C(1,1), D(0,1). Sastaviti proceduru Gadjanje koja će odrediti broj poena na sledeći način: ako je
Zadaci - procedure Zad1. Data je kvadratna meta u koordinatnom sistemu sa koordinatama A(0,0), B(1,0), C(1,1), D(0,1). Sastaviti proceduru Gadjanje koja će odrediti broj poena na sledeći način: ako je
Računarske osnove Interneta (SI3ROI, IR4ROI)
") Računarske osnove terneta (SI3ROI, IR4ROI) Vežbe MPLS Predavač: 08.11.2011. Dražen Drašković, drazen.draskovic@etf.rs Autori: Dražen Drašković Naučili ste na predavanjima MPLS (Multi-Protocol Label Switching)
Računarske osnove terneta (SI3ROI, IR4ROI) Vežbe MPLS Predavač: 08.11.2011. Dražen Drašković, drazen.draskovic@etf.rs Autori: Dražen Drašković Naučili ste na predavanjima MPLS (Multi-Protocol Label Switching)
VHDLPrimeri Poglavlje5.doc
 5. VHDL opis kola koja obavljaju osnovne aritmetičke funkcije Sabirači Jednobitni potpuni sabirač definisan je tablicom istinitosti iz Tabele 5.1. Tabela 5.1. cin a b sum cout 0 0 0 0 0 0 0 1 1 0 0 1 0
5. VHDL opis kola koja obavljaju osnovne aritmetičke funkcije Sabirači Jednobitni potpuni sabirač definisan je tablicom istinitosti iz Tabele 5.1. Tabela 5.1. cin a b sum cout 0 0 0 0 0 0 0 1 1 0 0 1 0
Osnove programskog jezika C# Čas 5. Delegati, događaji i interfejsi
 Osnove programskog jezika C# Čas 5. Delegati, događaji i interfejsi DELEGATI Bezbedni pokazivači na funkcije Jer garantuju vrednost deklarisanog tipa. Prevodilac prijavljuje grešku ako pokušate da povežete
Osnove programskog jezika C# Čas 5. Delegati, događaji i interfejsi DELEGATI Bezbedni pokazivači na funkcije Jer garantuju vrednost deklarisanog tipa. Prevodilac prijavljuje grešku ako pokušate da povežete
Računarska grafika-vežbe. 2 Parametarske krive Bezjeova kriva, Katmul-Rom splajn
 Računarska grafika-vežbe 2 Parametarske krive Bezjeova kriva, Katmul-Rom splajn Kubna Bezjeova kriva P(t) = (1- t)p 0 + 3t(1- t)p 1 + 3t(1- t)p 2 + tp 3 za t [0,1] P t = t t t 2 3 ( ) [1 ] 1 0 0 0 P 0
Računarska grafika-vežbe 2 Parametarske krive Bezjeova kriva, Katmul-Rom splajn Kubna Bezjeova kriva P(t) = (1- t)p 0 + 3t(1- t)p 1 + 3t(1- t)p 2 + tp 3 za t [0,1] P t = t t t 2 3 ( ) [1 ] 1 0 0 0 P 0
Tema 8: Koncepti i teorije relevantne za donošenje odluka (VEŽBE)
") Tema 8: Koncepti i teorije relevantne za donošenje odluka (VEŽBE) SISTEMI ZA PODRŠKU ODLUČIVANJU dr Vladislav Miškovic vmiskovic@singidunum.ac.rs Fakultet za računarstvo i informatiku 2013/2014 Tema 8:
Tema 8: Koncepti i teorije relevantne za donošenje odluka (VEŽBE) SISTEMI ZA PODRŠKU ODLUČIVANJU dr Vladislav Miškovic vmiskovic@singidunum.ac.rs Fakultet za računarstvo i informatiku 2013/2014 Tema 8:
VRIJEDNOSTI ATRIBUTA
 VRIJEDNOSTI ATRIBUTA Svaki atribut (bilo da je primarni ključ, vanjski ključ ili običan atribut) može i ne mora imati ograničenja na svojim vrijednostima. Neka od ograničenja nad atributima: Null / Not
VRIJEDNOSTI ATRIBUTA Svaki atribut (bilo da je primarni ključ, vanjski ključ ili običan atribut) može i ne mora imati ograničenja na svojim vrijednostima. Neka od ograničenja nad atributima: Null / Not
Vežbe - XII nedelja PHP Doc
 Vežbe - XII nedelja PHP Doc Dražen Drašković, asistent Elektrotehnički fakultet Univerziteta u Beogradu Verzija alata JavaDoc za programski jezik PHP Standard za komentarisanje PHP koda Omogućava generisanje
Vežbe - XII nedelja PHP Doc Dražen Drašković, asistent Elektrotehnički fakultet Univerziteta u Beogradu Verzija alata JavaDoc za programski jezik PHP Standard za komentarisanje PHP koda Omogućava generisanje
Numeričke metode i praktikum
 Numeričke metode i praktikum Aleksandar Maksimović IRB / 23/03/2006 / Str. 1 vektori Vektor u 3D prostoru. C: int v1[3]; v1[0]=a;v1[1]=b;v1[2]=c; Fortran: INTEGER V1(3) V1(1)=a V1(2)=b V1(3)=c Skalarni
Numeričke metode i praktikum Aleksandar Maksimović IRB / 23/03/2006 / Str. 1 vektori Vektor u 3D prostoru. C: int v1[3]; v1[0]=a;v1[1]=b;v1[2]=c; Fortran: INTEGER V1(3) V1(1)=a V1(2)=b V1(3)=c Skalarni
VB komande. Programiranje 1
 VB komande Programiranje 1 Zadatak 1: Sastaviti program koji se sastoji iz jedne ListBox kontrole, jedne Textbox kontrole i dva komandna dugmeta. Klikom na prvo komandno dugme umeće se u ListBox sadržaj
VB komande Programiranje 1 Zadatak 1: Sastaviti program koji se sastoji iz jedne ListBox kontrole, jedne Textbox kontrole i dva komandna dugmeta. Klikom na prvo komandno dugme umeće se u ListBox sadržaj
Variable Neighborhood Descent - VND (Metoda promenljivog spusta)
") Variable Neighborhood Descent - VND (Metoda promenljivog spusta) Izabrati skup okolina N k, k = 1,..., k max koje će se koristiti za pretragu; Na slučajan način izabrati početno rešenje x X i postaviti
Variable Neighborhood Descent - VND (Metoda promenljivog spusta) Izabrati skup okolina N k, k = 1,..., k max koje će se koristiti za pretragu; Na slučajan način izabrati početno rešenje x X i postaviti
Računarska grafika-vežbe. 5 JavaFX 3D scena, objekti, kamera, svetlo
 Računarska grafika-vežbe 5 JavaFX 3D scena, objekti, kamera, svetlo Test 3D scene (1/2) Program za test 3D scene: import javafx.application.application; import javafx.application.conditionalfeature; import
Računarska grafika-vežbe 5 JavaFX 3D scena, objekti, kamera, svetlo Test 3D scene (1/2) Program za test 3D scene: import javafx.application.application; import javafx.application.conditionalfeature; import
Besplatni softverski alati
 Sadržaj Besplatni softverski alati GIMP 1 1. 2. 3. 4. 5. Zoltan Geller zoltang@ff.uns.ac.rs 2016 6. Potrebni alati - Kompresovanje fajlova i foldera - Potrebni alati - Dekompresovanje fajlova i foldera
Sadržaj Besplatni softverski alati GIMP 1 1. 2. 3. 4. 5. Zoltan Geller zoltang@ff.uns.ac.rs 2016 6. Potrebni alati - Kompresovanje fajlova i foldera - Potrebni alati - Dekompresovanje fajlova i foldera
UPUTSTVO ZA KORIŠĆENJE NOVOG SPINTER WEBMAIL-a
 UPUTSTVO ZA KORIŠĆENJE NOVOG SPINTER WEBMAIL-a Webmail sistem ima podršku za SSL (HTTPS). Korištenjem ovog protokola sva komunikacija između Webmail sistema i vašeg Web čitača je kriptovana. Prilikom pristupa
UPUTSTVO ZA KORIŠĆENJE NOVOG SPINTER WEBMAIL-a Webmail sistem ima podršku za SSL (HTTPS). Korištenjem ovog protokola sva komunikacija između Webmail sistema i vašeg Web čitača je kriptovana. Prilikom pristupa
DETERMINATION OF THE CHARACTERISTIC PARAMETERS IN THE GENERAL COLLINEAR SPACES IN THE GENERAL CASE UDC (045)=20
=20") FACTA UNIVERSITATIS Series: Architecture and Civil Engineering Vol. 3, N o, 005, pp. 09-7 DETERMINATION OF THE CHARACTERISTIC PARAMETERS IN THE GENERAL COLLINEAR SPACES IN THE GENERAL CASE UDC 54.75 (045)=0
FACTA UNIVERSITATIS Series: Architecture and Civil Engineering Vol. 3, N o, 005, pp. 09-7 DETERMINATION OF THE CHARACTERISTIC PARAMETERS IN THE GENERAL COLLINEAR SPACES IN THE GENERAL CASE UDC 54.75 (045)=0
DETERMINATION OF THE CHARACTERISTIC PARAMETERS IN THE SPECIAL COLLINEAR SPACE IN THE GENERAL CASE UDC (045)=111
=111") FACTA UNIVERSITATIS Series: Architecture and Civil Engineering Vol. 5, N o, 007, pp. 49-59 DETERMINATION OF THE CHARACTERISTIC PARAMETERS IN THE SPECIAL COLLINEAR SPACE IN THE GENERAL CASE UDC 54.757(045)=
FACTA UNIVERSITATIS Series: Architecture and Civil Engineering Vol. 5, N o, 007, pp. 49-59 DETERMINATION OF THE CHARACTERISTIC PARAMETERS IN THE SPECIAL COLLINEAR SPACE IN THE GENERAL CASE UDC 54.757(045)=
Svi Java tipovi imaju ekvivalentan tip u jeziku Scala Većina Scala koda se direktno preslikava u odgovarajući Java konstrukt
 Funkcionalno programiranje Interoperabilnost jezika Scala i Java Prevođenje u Java bajt kod Svi Java tipovi imaju ekvivalentan tip u jeziku Scala Većina Scala koda se direktno preslikava u odgovarajući
Funkcionalno programiranje Interoperabilnost jezika Scala i Java Prevođenje u Java bajt kod Svi Java tipovi imaju ekvivalentan tip u jeziku Scala Većina Scala koda se direktno preslikava u odgovarajući
Uvod u relacione baze podataka
 Uvod u relacione baze podataka Ana Spasić 5. čas 1 Podupiti, operatori exists i in 1. Izdvojiti imena i prezimena studenata koji su položili predmet čiji je identifikator 2001. Rešenje korišćenjem spajanja
Uvod u relacione baze podataka Ana Spasić 5. čas 1 Podupiti, operatori exists i in 1. Izdvojiti imena i prezimena studenata koji su položili predmet čiji je identifikator 2001. Rešenje korišćenjem spajanja
Perspective projection. A. Mantegna, Martyrdom of St. Christopher, c. 1450
 Perspective projection A. Mantegna, Martyrdom of St. Christopher, c. 1450 Overview of next two lectures The pinhole projection model Qualitative properties Perspective projection matrix Cameras with lenses
Perspective projection A. Mantegna, Martyrdom of St. Christopher, c. 1450 Overview of next two lectures The pinhole projection model Qualitative properties Perspective projection matrix Cameras with lenses
CSS CSS. selector { property: value; } 3/20/2018. CSS: Cascading Style Sheets
 CSS CSS CSS: Cascading Style Sheets - Opisuje izgled (appearance) i raspored (layout) stranice - Sastoji se od CSS pravila, koji defini[u skup stilova selector { property: value; 1 Font face: font-family
CSS CSS CSS: Cascading Style Sheets - Opisuje izgled (appearance) i raspored (layout) stranice - Sastoji se od CSS pravila, koji defini[u skup stilova selector { property: value; 1 Font face: font-family
KLASIFIKACIJA JELENA JOVANOVIĆ. Web:
 KLASIFIKACIJA JELENA JOVANOVIĆ Email: jeljov@gmail.com Web: http://jelenajovanovic.net PREGLED PREDAVANJA Šta je klasifikacija? Binarna i više-klasna klasifikacija Algoritmi klasifikacije Mere uspešnosti
KLASIFIKACIJA JELENA JOVANOVIĆ Email: jeljov@gmail.com Web: http://jelenajovanovic.net PREGLED PREDAVANJA Šta je klasifikacija? Binarna i više-klasna klasifikacija Algoritmi klasifikacije Mere uspešnosti
MAN-522: COMPUTER VISION SET-2 Projections and Camera Calibration
 MAN-522: COMPUTER VISION SET-2 Projections and Camera Calibration Image formation How are objects in the world captured in an image? Phsical parameters of image formation Geometric Tpe of projection Camera
MAN-522: COMPUTER VISION SET-2 Projections and Camera Calibration Image formation How are objects in the world captured in an image? Phsical parameters of image formation Geometric Tpe of projection Camera
CMPSCI 670: Computer Vision! Image formation. University of Massachusetts, Amherst September 8, 2014 Instructor: Subhransu Maji
 CMPSCI 670: Computer Vision! Image formation University of Massachusetts, Amherst September 8, 2014 Instructor: Subhransu Maji MATLAB setup and tutorial Does everyone have access to MATLAB yet? EdLab accounts
CMPSCI 670: Computer Vision! Image formation University of Massachusetts, Amherst September 8, 2014 Instructor: Subhransu Maji MATLAB setup and tutorial Does everyone have access to MATLAB yet? EdLab accounts
pojedinačnom elementu niza se pristupa imeniza[indeks] indeks od 0 do n-1
![pojedinačnom elementu niza se pristupa imeniza[indeks] indeks od 0 do n-1](/thumbs/78/78265039.jpg "pojedinačnom elementu niza se pristupa imeniza[indeks] indeks od 0 do n-1") NIZOVI Niz deklarišemo navođenjemtipa elemenata za kojim sledi par srednjih zagrada[] i naziv niza. Ako je niz višedimenzionalni između zagrada[] se navode zarezi, čiji je broj za jedan manji od dimenzija
NIZOVI Niz deklarišemo navođenjemtipa elemenata za kojim sledi par srednjih zagrada[] i naziv niza. Ako je niz višedimenzionalni između zagrada[] se navode zarezi, čiji je broj za jedan manji od dimenzija
The n-dimensional Simply Isotropic Space
 Blaženka Divj ak Faculty of Organization and Informatics Varaždin E-mail: Blazenka.Divjak@foi.hr. UDK: 513 Original Scientific Paper The n-dimensional Simply Isotropic Space Let (1/ 1 ), MJ be n-dimensional
Blaženka Divj ak Faculty of Organization and Informatics Varaždin E-mail: Blazenka.Divjak@foi.hr. UDK: 513 Original Scientific Paper The n-dimensional Simply Isotropic Space Let (1/ 1 ), MJ be n-dimensional
Računarska grafika-vežbe. 3 JavaFX animacija i interakcija
 Računarska grafika-vežbe 3 JavaFX animacija i interakcija Zadatak1: Spirala+ Kolokvijum K1 09/10, zadatak prerađen za JavaFX Napisati klasu koja sastavlja graf scene za crtanje centralno simetrične figure
Računarska grafika-vežbe 3 JavaFX animacija i interakcija Zadatak1: Spirala+ Kolokvijum K1 09/10, zadatak prerađen za JavaFX Napisati klasu koja sastavlja graf scene za crtanje centralno simetrične figure
Case Study Hrvatska pošta: Korisničko iskustvo iz snova. Tomislav Turk Samostalni sistem inženjer, Combis d.o.o. Zagreb,
 Case Study Hrvatska pošta: Korisničko iskustvo iz snova Tomislav Turk Samostalni sistem inženjer, Combis d.o.o. Zagreb, 27.12.2018. Sadržaj Hrvatska pošta prije projekta Izazovi projekta Tehnologije korištene
Case Study Hrvatska pošta: Korisničko iskustvo iz snova Tomislav Turk Samostalni sistem inženjer, Combis d.o.o. Zagreb, 27.12.2018. Sadržaj Hrvatska pošta prije projekta Izazovi projekta Tehnologije korištene
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
ANALYSIS OF MAPPING OF GENERAL II DEGREE SURFACES IN COLLINEAR SPACES UDC (045)=111
=111") FACTA UNIVERSITATIS Series: Architecture and Civil Engineering Vol. 8, N o 3, 2010, pp. 317-327 DOI: 10.2298/FUACE1003317K ANALYSIS OF MAPPING OF GENERAL II DEGREE SURFACES IN COLLINEAR SPACES UDC 514.757(045)=111
FACTA UNIVERSITATIS Series: Architecture and Civil Engineering Vol. 8, N o 3, 2010, pp. 317-327 DOI: 10.2298/FUACE1003317K ANALYSIS OF MAPPING OF GENERAL II DEGREE SURFACES IN COLLINEAR SPACES UDC 514.757(045)=111
PITANJA ZA II KOLOKVIJUM KLASE I OBJEKTI
 PITANJA ZA II KOLOKVIJUM KLASE I OBJEKTI 1. Enkapsulacija je podataka. skrivanje apstrakcija nasledivanje 2. Unutar deklaracije klase navode se: definicije funkcija clanica prototipovi (deklaracije) funkcija
PITANJA ZA II KOLOKVIJUM KLASE I OBJEKTI 1. Enkapsulacija je podataka. skrivanje apstrakcija nasledivanje 2. Unutar deklaracije klase navode se: definicije funkcija clanica prototipovi (deklaracije) funkcija
Windows Server 2012, VDI Licenciranje najprodavanijeg servera, što je novo, VDI licenciranje. Office 2013 / Office 365
 Windows 8 Licenciranje, razlike u verzijama Windows Server 2012, VDI Licenciranje najprodavanijeg servera, što je novo, VDI licenciranje Serverski proizvodi Server 2012, System centar 2012, SQL 2012, Sharepoint
Windows 8 Licenciranje, razlike u verzijama Windows Server 2012, VDI Licenciranje najprodavanijeg servera, što je novo, VDI licenciranje Serverski proizvodi Server 2012, System centar 2012, SQL 2012, Sharepoint
Binarne hrpe. Strukture podataka i algoritmi VJEŽBE 26. siječnja / 133
 Binarne hrpe Potpuno binarno stablo binarno stablo u kojem svaki čvor koji nije list ima točno 2 nasljednika. Binarna hrpa potpuno binarno stablo u kojem svaki čvor koji nije list ima veću ključnu vrijednost
Binarne hrpe Potpuno binarno stablo binarno stablo u kojem svaki čvor koji nije list ima točno 2 nasljednika. Binarna hrpa potpuno binarno stablo u kojem svaki čvor koji nije list ima veću ključnu vrijednost
Rectification. Dr. Gerhard Roth
 Rectification Dr. Gerhard Roth Problem Definition Given a pair of stereo images, the intrinsic parameters of each camera, and the extrinsic parameters of the system, R, and, compute the image transformation
Rectification Dr. Gerhard Roth Problem Definition Given a pair of stereo images, the intrinsic parameters of each camera, and the extrinsic parameters of the system, R, and, compute the image transformation
Z1. Dati RDF graf predstavljen u JSON-LD sintaksi potrebno je grafički predstaviti u skladu sa RDF notacijom. (5 poena)
") Z1. Dati RDF graf predstavljen u JSON-LD sintaksi potrebno je grafički predstaviti u skladu sa RDF notacijom. (5 poena) "@context": "http://schema.org", "@type": "JobPosting", @id : http://example.com/person/ab12,
Z1. Dati RDF graf predstavljen u JSON-LD sintaksi potrebno je grafički predstaviti u skladu sa RDF notacijom. (5 poena) "@context": "http://schema.org", "@type": "JobPosting", @id : http://example.com/person/ab12,
b) program deljiv3; uses wincrt; var i:integer; begin i:=3; while i<100 do begin write(i:5); i:=i+3; end; end.
 program deljiv3; uses wincrt; var i:integer; begin i:=3; while i<100 do begin write(i:5); i:=i+3; end; end.") NAREDBA CIKLUSA SA PREDUSLOVOM WHILE 1.Odrediti vrednosti s i p nakon izvrsenja sledecih naredbi za dato a=43, a=34, a=105 program p1; var a,s,p:integer; write('unesite a:');readln(a); p:=a; s:=0; while
NAREDBA CIKLUSA SA PREDUSLOVOM WHILE 1.Odrediti vrednosti s i p nakon izvrsenja sledecih naredbi za dato a=43, a=34, a=105 program p1; var a,s,p:integer; write('unesite a:');readln(a); p:=a; s:=0; while
Programiranje III razred
 Tehnička škola 9. maj Bačka Palanka Programiranje III razred Naredbe ciklusa for petlja Naredbe ciklusa Veoma često se ukazuje potreba za ponavljanjem nekih naredbi više puta tj. za ponavljanjem nekog
Tehnička škola 9. maj Bačka Palanka Programiranje III razred Naredbe ciklusa for petlja Naredbe ciklusa Veoma često se ukazuje potreba za ponavljanjem nekih naredbi više puta tj. za ponavljanjem nekog
Pinhole Camera Model 10/05/17. Computational Photography Derek Hoiem, University of Illinois
 Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
CIS 580, Machine Perception, Spring 2015 Homework 1 Due: :59AM
 CIS 580, Machine Perception, Spring 2015 Homework 1 Due: 2015.02.09. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Camera Model, Focal Length and
CIS 580, Machine Perception, Spring 2015 Homework 1 Due: 2015.02.09. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Camera Model, Focal Length and
Camera Models and Image Formation. Srikumar Ramalingam School of Computing University of Utah
 Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Reference Most slides are adapted from the following notes: Some lecture notes on geometric
Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Reference Most slides are adapted from the following notes: Some lecture notes on geometric
Java. Ugnježdeni tipovi IMI PMF KG OOP 09 AKM. najveći deo teksta je preuzet sa slajdova Prof. Dragana Milićeva (ETF Bg) namenjenih pedmetu OOP2
 namenjenih pedmetu OOP2") Java IMI PMF KG OOP 0 AKM 1 Ugnježdeni tipovi najveći deo teksta je preuzet sa slajdova Prof. Dragana Milićeva (ETF Bg) namenjenih pedmetu OOP2 Ugneždeni tipovi IMI PMF KG OOP 0 AKM 2 Unutrašnje klase
Java IMI PMF KG OOP 0 AKM 1 Ugnježdeni tipovi najveći deo teksta je preuzet sa slajdova Prof. Dragana Milićeva (ETF Bg) namenjenih pedmetu OOP2 Ugneždeni tipovi IMI PMF KG OOP 0 AKM 2 Unutrašnje klase
PREDMET. Osnove Java Programiranja. Čas JAVADOC
 PREDMET Osnove Java Programiranja JAVADOC Copyright 2010 UNIVERZITET METROPOLITAN, Beograd. Sva prava zadržana. Bez prethodne pismene dozvole od strane Univerziteta METROPOLITAN zabranjena je reprodukcija,
PREDMET Osnove Java Programiranja JAVADOC Copyright 2010 UNIVERZITET METROPOLITAN, Beograd. Sva prava zadržana. Bez prethodne pismene dozvole od strane Univerziteta METROPOLITAN zabranjena je reprodukcija,
Camera Model and Calibration
 Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
CLOSED-LOOP CONTROL OF SEGMENTED IMAGE QUALITY FOR IMPROVEMENT OF DIGITAL IMAGE PROCESSING UDC 62-52: Danijela Ristić-Durrant, Axel Gräser
 FACTA UNIVERSITATIS Series: Automatic Control and Robotics Vol. 7, N o 1, 2008, pp. 27-34 CLOSED-LOOP CONTROL OF SEGMENTED IMAGE QUALITY FOR IMPROVEMENT OF DIGITAL IMAGE PROCESSING UDC 62-52:004.932 Danijela
FACTA UNIVERSITATIS Series: Automatic Control and Robotics Vol. 7, N o 1, 2008, pp. 27-34 CLOSED-LOOP CONTROL OF SEGMENTED IMAGE QUALITY FOR IMPROVEMENT OF DIGITAL IMAGE PROCESSING UDC 62-52:004.932 Danijela
Izrada VI laboratorijske vježbe
 Izrada VI laboratorijske vježbe 1. Programirati proceduru koja se aktivira sa Standard palete alatki klikom na button Fajlovi. Prilikom startovanja procedure prikazuje se forma koja sadrži jedan list box
Izrada VI laboratorijske vježbe 1. Programirati proceduru koja se aktivira sa Standard palete alatki klikom na button Fajlovi. Prilikom startovanja procedure prikazuje se forma koja sadrži jedan list box
Učitati cio broj n i štampati njegovu recipročnu vrijednost. Ako je učitan broj 0, štampati 1/0.
 Kontrolne naredbe Primjeri: Opšti oblik razgranate strukture (if sa ) if (uslov) Naredba 1 ili blok naredbi1 Naredba 2 ili blok naredbi2 Učitati broj x i štampati vrijednost double x, z; Scanner in=new
Kontrolne naredbe Primjeri: Opšti oblik razgranate strukture (if sa ) if (uslov) Naredba 1 ili blok naredbi1 Naredba 2 ili blok naredbi2 Učitati broj x i štampati vrijednost double x, z; Scanner in=new
Nizovi. Programiranje 1
 Nizovi Programiranje 1 VB Nizovi Zamislite da imate 10,000 šešira i da morate svakome od njih dati jedinstvenu oznaku. Kako biste to napravili? Bilo bi razumno svakom šeširu dati njegov broj. Sada možete
Nizovi Programiranje 1 VB Nizovi Zamislite da imate 10,000 šešira i da morate svakome od njih dati jedinstvenu oznaku. Kako biste to napravili? Bilo bi razumno svakom šeširu dati njegov broj. Sada možete
Projective Geometry and Camera Models
 Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
var Form1: TForm1; implementation {$R *.dfm} procedure TForm1.Button1Click(Sender: TObject); begin ListBox1.Items.LoadFromFile('d:\brojevi.
; begin ListBox1.Items.LoadFromFile('d:\brojevi.") 1 PANEL komponenta kontejnerska, slična GropBox. Roditeljska komponenta za komp. postavljene na nju. Zajedno se pomeraju. Caption svojstvo za naziv; Alighment pomera svojstvo Caption levo i desno; Align
1 PANEL komponenta kontejnerska, slična GropBox. Roditeljska komponenta za komp. postavljene na nju. Zajedno se pomeraju. Caption svojstvo za naziv; Alighment pomera svojstvo Caption levo i desno; Align
Ugradjena promenljiva ans cuva poslednju vrednost koja nije dodeljena ni jednoj promenljivoj >> ans+3
 Ugradjena promenljiva Pi >> pi 3.1416 Ugradjena promenljiva NaN (Not A Number) >> NaN NaN Beskonacno >> Inf Inf Ugradjena funkcija exp() za eksponencijalnu funkciju (npr. e na 3 stepen) >> exp(3) 20.0855
Ugradjena promenljiva Pi >> pi 3.1416 Ugradjena promenljiva NaN (Not A Number) >> NaN NaN Beskonacno >> Inf Inf Ugradjena funkcija exp() za eksponencijalnu funkciju (npr. e na 3 stepen) >> exp(3) 20.0855
RECTILINEAR GUIDING OF THE COUPLER POINT REALIZED BY SOME FOUR-BAR LINKAGES WITH AN ELASTIC COUPLER UDC Nenad T. Pavlović, Nenad D.
 FACTA UNIVERSITATIS Series: Mechanical Engineering Vol.1, N o 8, 2001, pp. 989-996 RECTILINEAR GUIDING OF THE COUPLER POINT REALIZED BY SOME FOUR-BAR LINKAGES WITH AN ELASTIC COUPLER UDC 621.8 Nenad T.
FACTA UNIVERSITATIS Series: Mechanical Engineering Vol.1, N o 8, 2001, pp. 989-996 RECTILINEAR GUIDING OF THE COUPLER POINT REALIZED BY SOME FOUR-BAR LINKAGES WITH AN ELASTIC COUPLER UDC 621.8 Nenad T.
Kada se pokrene forma da bude plave boje. Dugme Crtaj krugove da iscrtava slučajan broj N krugova istog poluprečnika r (1/4 visine forme) čiji su
 čiji su") Kada se pokrene forma da bude plave boje. Dugme Crtaj krugove da iscrtava slučajan broj N krugova istog poluprečnika r (1/4 visine forme) čiji su centri na neiscrtanom krugu poluprečnika r. Dugme Boji
Kada se pokrene forma da bude plave boje. Dugme Crtaj krugove da iscrtava slučajan broj N krugova istog poluprečnika r (1/4 visine forme) čiji su centri na neiscrtanom krugu poluprečnika r. Dugme Boji
Image Transformations & Camera Calibration. Mašinska vizija, 2018.
 Image Transformations & Camera Calibration Mašinska vizija, 2018. Image transformations What ve we learnt so far? Example 1 resize and rotate Open warp_affine_template.cpp Perform simple resize
Image Transformations & Camera Calibration Mašinska vizija, 2018. Image transformations What ve we learnt so far? Example 1 resize and rotate Open warp_affine_template.cpp Perform simple resize
UNIVERZITET U BEOGRADU ELEKTROTEHNIČKI FAKULTET
 UNIVERZITET U BEOGRADU ELEKTROTEHNIČKI FAKULTET Katedra za elektroniku Računarska elektronika Grupa br. 11 Projekat br. 8 Studenti: Stefan Vukašinović 466/2013 Jelena Urošević 99/2013 Tekst projekta :
UNIVERZITET U BEOGRADU ELEKTROTEHNIČKI FAKULTET Katedra za elektroniku Računarska elektronika Grupa br. 11 Projekat br. 8 Studenti: Stefan Vukašinović 466/2013 Jelena Urošević 99/2013 Tekst projekta :
Sadržaj. Verzija 03/2017 Primjenjuje se od 20. novembra godine
 Sadržaj 1 Web hosting 3 2 Registracija domena 3 3 Internet marketing 3 4 E mail paketi 4 5 Virtuoz 4 6 Internet Security servis 5 7 Kolokacija servera 6 8 Cloud usluge 6 9 Aktivni servisi koji nijesu u
Sadržaj 1 Web hosting 3 2 Registracija domena 3 3 Internet marketing 3 4 E mail paketi 4 5 Virtuoz 4 6 Internet Security servis 5 7 Kolokacija servera 6 8 Cloud usluge 6 9 Aktivni servisi koji nijesu u
namespace spojneice { public partial class Form1 : Form { public Form1() { InitializeComponent(); }
 { InitializeComponent(); }") Spojnice using System; using System.Collections.Generic; using System.ComponentModel; using System.Data; using System.Drawing; using System.Linq; using System.Text; using System.Windows.Forms; using System.IO;
Spojnice using System; using System.Collections.Generic; using System.ComponentModel; using System.Data; using System.Drawing; using System.Linq; using System.Text; using System.Windows.Forms; using System.IO;
DD2423 Image Analysis and Computer Vision IMAGE FORMATION. Computational Vision and Active Perception School of Computer Science and Communication
 DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
24/03/2018. Deklaracija promenljivih. Inicijalizacija promenljivih. Deklaracija i inicijalizacija promenljivih
 Deklaracija promenljivih Inicijalizacija promenljivih Deklaracija promenljive obuhvata: dodelu simboličkog imena promenljivoj i određivanje tipa promenljive (tip određuje koja će vrsta memorijskog registra
Deklaracija promenljivih Inicijalizacija promenljivih Deklaracija promenljive obuhvata: dodelu simboličkog imena promenljivoj i određivanje tipa promenljive (tip određuje koja će vrsta memorijskog registra
KREDITI ZA POLJOPRIVREDNIKE
 UNICREDIT BANK SRBIJA AD 11 000 Beograd, Rajićeva 27-29 Telefon: 011/ 3777 888 www.unicreditbank.rs e-mail:office@unicreditgroup.rs KREDITI ZA POLJOPRIVREDNIKE Vlasnik ste ili zakupac 6 hektara obradive
UNICREDIT BANK SRBIJA AD 11 000 Beograd, Rajićeva 27-29 Telefon: 011/ 3777 888 www.unicreditbank.rs e-mail:office@unicreditgroup.rs KREDITI ZA POLJOPRIVREDNIKE Vlasnik ste ili zakupac 6 hektara obradive
GUI - događaji (Events) i izuzeci. Bojan Tomić
 i izuzeci. Bojan Tomić") GUI - događaji (Events) i izuzeci Bojan Tomić Događaji GUI reaguje na događaje (events) Događaj je neka akcija koju korisnik programa ili neko drugi izvrši korišćenjem perifernih uređaja (uglavnom miša
GUI - događaji (Events) i izuzeci Bojan Tomić Događaji GUI reaguje na događaje (events) Događaj je neka akcija koju korisnik programa ili neko drugi izvrši korišćenjem perifernih uređaja (uglavnom miša
Introduction to Computer Vision
 Introduction to Computer Vision Michael J. Black Nov 2009 Perspective projection and affine motion Goals Today Perspective projection 3D motion Wed Projects Friday Regularization and robust statistics
Introduction to Computer Vision Michael J. Black Nov 2009 Perspective projection and affine motion Goals Today Perspective projection 3D motion Wed Projects Friday Regularization and robust statistics
Aktuelna verzija Matlaba je 7, koja ima dosta poboljšanja u odnosu na prethodne.
 1. MATLAB UVOD Matlab predstavlja vrlo razvijen skup alata za računanje (matrice, kompleksni brojevi, simbolička matematika), vizualiziranje (2D i 3D), modeliranje, simulaciju i programiranje. Karakterizira
1. MATLAB UVOD Matlab predstavlja vrlo razvijen skup alata za računanje (matrice, kompleksni brojevi, simbolička matematika), vizualiziranje (2D i 3D), modeliranje, simulaciju i programiranje. Karakterizira
Cjenovnik usluga informacionog društva
 Cjenovnik usluga informacionog društva Verzija: 01/2018 Sadržaj 1 Web hosting 3 2 Registracija domena 3 3 Internet marketing 3 4 E mail paketi 4 5 Virtuoz 4 6 Internet Security servis 5 7 Kolokacija servera
Cjenovnik usluga informacionog društva Verzija: 01/2018 Sadržaj 1 Web hosting 3 2 Registracija domena 3 3 Internet marketing 3 4 E mail paketi 4 5 Virtuoz 4 6 Internet Security servis 5 7 Kolokacija servera
Aspektno programiranje u Javi. AOP + AspectJ
 1 Aspektno programiranje u Javi AOP + AspectJ Posledice nemodularnosti? slabo praćenje toka izvršavanja smanjenja produktivnost smanjen code reuse smanjen krajnji kvalitet celog sistema teško održavanje
1 Aspektno programiranje u Javi AOP + AspectJ Posledice nemodularnosti? slabo praćenje toka izvršavanja smanjenja produktivnost smanjen code reuse smanjen krajnji kvalitet celog sistema teško održavanje
CS201 Computer Vision Camera Geometry
 CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
2. Linijska algoritamska struktura
 Univerzitet u Nišu Građevinsko-arhitektonski fakultet Informatika 2 2. Linijska algoritamska struktura Milica Ćirić Blokovi za prikaz algoritma Algoritam se vizuelno može prikazati pomoću blok dijagrama,
Univerzitet u Nišu Građevinsko-arhitektonski fakultet Informatika 2 2. Linijska algoritamska struktura Milica Ćirić Blokovi za prikaz algoritma Algoritam se vizuelno može prikazati pomoću blok dijagrama,
Type 'demo()' for some demos, 'help()' for on-line help, or 'help.start()' for an HTML browser interface to help. Type 'q()' to quit R.
' for some demos, 'help()' for on-line help, or 'help.start()' for an HTML browser interface to help. Type 'q()' to quit R.") R version 2.13.1 (2011-07-08) Copyright (C) 2011 The R Foundation for Statistical Computing ISBN 3-900051-07-0 Platform: x86_64-pc-mingw32/x64 (64-bit) R is free software and comes with ABSOLUTELY NO WARRANTY.
R version 2.13.1 (2011-07-08) Copyright (C) 2011 The R Foundation for Statistical Computing ISBN 3-900051-07-0 Platform: x86_64-pc-mingw32/x64 (64-bit) R is free software and comes with ABSOLUTELY NO WARRANTY.
Jorge Salvador Marques, geometric camera model
 geometric camera model image acquisition 6 years ago today curc of te Holy Spirit, Brunellesci, 436 te camera projects 3D points into an image plane geometric primitives and transformations How do we see
geometric camera model image acquisition 6 years ago today curc of te Holy Spirit, Brunellesci, 436 te camera projects 3D points into an image plane geometric primitives and transformations How do we see
MERGING POINT CLOUDS FROM MULTIPLE KINECTS. Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia
 MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
Camera Models and Image Formation. Srikumar Ramalingam School of Computing University of Utah
 Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu VisualFunHouse.com 3D Street Art Image courtesy: Julian Beaver (VisualFunHouse.com) 3D
Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu VisualFunHouse.com 3D Street Art Image courtesy: Julian Beaver (VisualFunHouse.com) 3D
Uputstvo za korišćenje logrotate funkcije
 Copyright AMRES Sadržaj Uvod 3 Podešavanja logrotate konfiguracionog fajla 4 Strana 2 od 5 Uvod Ukoliko je aktivirano logovanje za RADIUS proces, može se desiti da posle određenog vremena server bude preopterećen
Copyright AMRES Sadržaj Uvod 3 Podešavanja logrotate konfiguracionog fajla 4 Strana 2 od 5 Uvod Ukoliko je aktivirano logovanje za RADIUS proces, može se desiti da posle određenog vremena server bude preopterećen
The Cloud s Computing Security
 The Cloud s Computing Security MILICA D. ĐEKIĆ, Subotica Professional Paper UDC: 004.722.035 DOI: 10.5937/tehnika1802300D The emerging technologies are getting adopted massively worldwide and they are
The Cloud s Computing Security MILICA D. ĐEKIĆ, Subotica Professional Paper UDC: 004.722.035 DOI: 10.5937/tehnika1802300D The emerging technologies are getting adopted massively worldwide and they are
Upravljanje sistemom datoteka
 Upravljanje sistemom datoteka Sistem datoteka Datoteka (file) predstavlja jedinicu smeštanja informacija na diskovima i ostalim spoljašnjim medijumima. Pri tome datoteka skriva detalje, od korisnika, o
Upravljanje sistemom datoteka Sistem datoteka Datoteka (file) predstavlja jedinicu smeštanja informacija na diskovima i ostalim spoljašnjim medijumima. Pri tome datoteka skriva detalje, od korisnika, o
Assignment 2 : Projection and Homography
 TECHNISCHE UNIVERSITÄT DRESDEN EINFÜHRUNGSPRAKTIKUM COMPUTER VISION Assignment 2 : Projection and Homography Hassan Abu Alhaija November 7,204 INTRODUCTION In this exercise session we will get a hands-on
TECHNISCHE UNIVERSITÄT DRESDEN EINFÜHRUNGSPRAKTIKUM COMPUTER VISION Assignment 2 : Projection and Homography Hassan Abu Alhaija November 7,204 INTRODUCTION In this exercise session we will get a hands-on
Camera models and calibration
 Camera models and calibration Read tutorial chapter 2 and 3. http://www.cs.unc.edu/~marc/tutorial/ Szeliski s book pp.29-73 Schedule (tentative) 2 # date topic Sep.8 Introduction and geometry 2 Sep.25
Camera models and calibration Read tutorial chapter 2 and 3. http://www.cs.unc.edu/~marc/tutorial/ Szeliski s book pp.29-73 Schedule (tentative) 2 # date topic Sep.8 Introduction and geometry 2 Sep.25
Stereo Observation Models
 Stereo Observation Models Gabe Sibley June 16, 2003 Abstract This technical report describes general stereo vision triangulation and linearized error modeling. 0.1 Standard Model Equations If the relative
Stereo Observation Models Gabe Sibley June 16, 2003 Abstract This technical report describes general stereo vision triangulation and linearized error modeling. 0.1 Standard Model Equations If the relative
ECE Digital Image Processing and Introduction to Computer Vision. Outline
 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 1. Recap Outline 2. Modeling Projection and Projection
ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 1. Recap Outline 2. Modeling Projection and Projection
Osnove programskog jezika C# Čas 4. Nasledjivanje 2. deo
 Osnove programskog jezika C# Čas 4. Nasledjivanje 2. deo Nasledjivanje klasa Modifikator new class A { public virtual void F() { Console.WriteLine("I am A"); } } class B : A { public override void F()
Osnove programskog jezika C# Čas 4. Nasledjivanje 2. deo Nasledjivanje klasa Modifikator new class A { public virtual void F() { Console.WriteLine("I am A"); } } class B : A { public override void F()
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras
 Cameras") Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 213 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 213 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
Camera Model and Calibration. Lecture-12
 Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
CIS 580, Machine Perception, Spring 2016 Homework 2 Due: :59AM
 CIS 580, Machine Perception, Spring 2016 Homework 2 Due: 2015.02.24. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Recover camera orientation By observing
CIS 580, Machine Perception, Spring 2016 Homework 2 Due: 2015.02.24. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Recover camera orientation By observing
Computer Vision Projective Geometry and Calibration. Pinhole cameras
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Koncept računarskog sistema
 Koncept računarskog sistema prof.dr. Džemal Kulašin Kiseljak, oktobar 2017. Teorija sistema Adekvatan metodološki okvir izučavanja informacijske tehnologije zasnovan je na teoriji sistema. Teorija sistema
Koncept računarskog sistema prof.dr. Džemal Kulašin Kiseljak, oktobar 2017. Teorija sistema Adekvatan metodološki okvir izučavanja informacijske tehnologije zasnovan je na teoriji sistema. Teorija sistema
RDF, RDFS i JSON-LD. NIKOLA MILIKIĆ URL: nikola.milikic.info
 RDF, RDFS i JSON-LD NIKOLA MILIKIĆ EMAIL: nikola.milikic@fon.bg.ac.rs URL: nikola.milikic.info Linked Data Linked Data predstavlja mrežu podataka koji su opisani na način da ih mogu razumeti mašine (koristeći
RDF, RDFS i JSON-LD NIKOLA MILIKIĆ EMAIL: nikola.milikic@fon.bg.ac.rs URL: nikola.milikic.info Linked Data Linked Data predstavlja mrežu podataka koji su opisani na način da ih mogu razumeti mašine (koristeći
Numerical Computation
 GNU Octave Numerical Computation vrlo često u tehnici retko stvarni problemi imaju closed-form solution čak i kad imaju, pitanje upotrebljivosti mnogo detalja numerički pristup u početku tretirano kao
GNU Octave Numerical Computation vrlo često u tehnici retko stvarni problemi imaju closed-form solution čak i kad imaju, pitanje upotrebljivosti mnogo detalja numerički pristup u početku tretirano kao
Rigid Body Motion and Image Formation. Jana Kosecka, CS 482
 Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Computer Vision cmput 428/615
 Computer Vision cmput 428/615 Basic 2D and 3D geometry and Camera models Martin Jagersand The equation of projection Intuitively: How do we develop a consistent mathematical framework for projection calculations?
Computer Vision cmput 428/615 Basic 2D and 3D geometry and Camera models Martin Jagersand The equation of projection Intuitively: How do we develop a consistent mathematical framework for projection calculations?
Introduction to Homogeneous coordinates
 Last class we considered smooth translations and rotations of the camera coordinate system and the resulting motions of points in the image projection plane. These two transformations were expressed mathematically
Last class we considered smooth translations and rotations of the camera coordinate system and the resulting motions of points in the image projection plane. These two transformations were expressed mathematically
Uputstvo za podešavanje mail klijenta
 Uputstvo za podešavanje mail klijenta 1. Podešavanje Thunderbird mail klijenta 1.1 Dodavanje mail naloga Da biste podesili Vaš mail klijent (u ovom slučaju Thunderbird) da prima i šalje mail-ove potrebno
Uputstvo za podešavanje mail klijenta 1. Podešavanje Thunderbird mail klijenta 1.1 Dodavanje mail naloga Da biste podesili Vaš mail klijent (u ovom slučaju Thunderbird) da prima i šalje mail-ove potrebno
Objektno orijentisano programiranje. Aleksandra Klašnja-Milićević Marko Marković
 Objektno orijentisano programiranje Aleksandra Klašnja-Milićević Marko Marković Teme koje će biti obrađene Uvod i koncepti OOP Klase Nasleđivanje Interfejsi Modifikatori, kreiranje instance klase, uništavanje
Objektno orijentisano programiranje Aleksandra Klašnja-Milićević Marko Marković Teme koje će biti obrađene Uvod i koncepti OOP Klase Nasleđivanje Interfejsi Modifikatori, kreiranje instance klase, uništavanje
Uputstva za instaliranje čitača Datalogic Skorpio u operativnom sistemu Windows 7 i višim POM-NA-XX-46, V3.0
 POM - Pomoć korisnicima Uputstva za instaliranje čitača Datalogic Skorpio u operativnom sistemu Windows 7 i višim POM-NA-XX-46, V3.0 IZUM, 2016 COBISS, COMARC, COBIB, COLIB, IZUM su zaštićeni znaci u posedu
POM - Pomoć korisnicima Uputstva za instaliranje čitača Datalogic Skorpio u operativnom sistemu Windows 7 i višim POM-NA-XX-46, V3.0 IZUM, 2016 COBISS, COMARC, COBIB, COLIB, IZUM su zaštićeni znaci u posedu
1. RASTERSKI PRIKAZIVAČI
 RAČUNARSKA GRAFIKA (IR4RG,MSRG, SI4RG). RASTERSKI PRIKAZIVAČI Sledeća slika prikazuje izgled signala slike za vreme trajanja jedne horizontalne linije (t H ) t HFP : horizontal front porch time t HBP :
RAČUNARSKA GRAFIKA (IR4RG,MSRG, SI4RG). RASTERSKI PRIKAZIVAČI Sledeća slika prikazuje izgled signala slike za vreme trajanja jedne horizontalne linije (t H ) t HFP : horizontal front porch time t HBP :
13. siječnja 2017., Slavonski Brod
 13. siječnja 2017., Slavonski Brod 3D modelling 3D modelling- process of developing a mathematical representation of any three dimensional surface of an object via specialized sofware-> 3D model 3D model
13. siječnja 2017., Slavonski Brod 3D modelling 3D modelling- process of developing a mathematical representation of any three dimensional surface of an object via specialized sofware-> 3D model 3D model
Lecture 8: Camera Models
 Lecture 8: Camera Models Dr. Juan Carlos Niebles Stanford AI Lab Professor Fei- Fei Li Stanford Vision Lab 1 14- Oct- 15 What we will learn today? Pinhole cameras Cameras & lenses The geometry of pinhole
Lecture 8: Camera Models Dr. Juan Carlos Niebles Stanford AI Lab Professor Fei- Fei Li Stanford Vision Lab 1 14- Oct- 15 What we will learn today? Pinhole cameras Cameras & lenses The geometry of pinhole
Camera model and multiple view geometry
 Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
Midterm Examination CS 534: Computational Photography
 Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
CSE 252B: Computer Vision II
 CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribe: Sameer Agarwal LECTURE 1 Image Formation 1.1. The geometry of image formation We begin by considering the process of image formation when a
CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribe: Sameer Agarwal LECTURE 1 Image Formation 1.1. The geometry of image formation We begin by considering the process of image formation when a
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras
 Cameras") Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 215 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 215 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.
![All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.](/thumbs/91/106597332.jpg "All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.") All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
Programiranje Programski jezik C. Sadržaj. Datoteke. prof.dr.sc. Ivo Ipšić 2009/2010
 Programiranje Programski jezik C prof.dr.sc. Ivo Ipšić 2009/2010 Sadržaj Ulazno-izlazne funkcije Datoteke Formatirane datoteke Funkcije za rad s datotekama Primjeri Datoteke komunikacija između programa
Programiranje Programski jezik C prof.dr.sc. Ivo Ipšić 2009/2010 Sadržaj Ulazno-izlazne funkcije Datoteke Formatirane datoteke Funkcije za rad s datotekama Primjeri Datoteke komunikacija između programa
Projective Geometry and Camera Models
 /2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
/2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3: