Reconstructing Reflective and Transparent Surfaces from Epipolar Plane Images
|
|
|
- Irma Ferguson
- 5 years ago
- Views:
Transcription
1 Sven Wanner and Bastian Goldlücke Heidelberg Collaboratory for Image Processing
2 1. Light Fields and Epipolar Plane Images 1. Light Fields and Epipolar Plane Images
3 Light Fields as a dense sampling of a scene on a regular planar grid 1. Light Fields and Epipolar Plane Images

4 Light Fields as a dense sampling of a scene on a regular planar grid Camera movement Epipolar Planes as linear mapping of 3D points in space 1. Light Fields and Epipolar Plane Images
5 2. Orientation vs. Matching 2. Orientation vs. Matching
6 Matching means Searching slow local minima discrete search space 2. Orientation vs. Matching
7 Analysing the Orientation fast more robust continous disparity space 2. Orientation vs. Matching
8 Analysing the Orientation fast more robust continous disparity space 2. Orientation vs. Matching
9 Analysing the Orientation fast more robust continous disparity space 2. Orientation vs. Matching
10 Analysing the Orientation fast more robust continous disparity space 2. Orientation vs. Matching
11 Analysing the Orientation fast more robust continous disparity space 2. Orientation vs. Matching
12 3. Single Orientation Analysis 3. Single Orientation Analysis
13 Orientation estimation using the structure tensor: The direction of the local level lines can be computed via a decomposition of the structure tensor which can be solved analytically: Eigenvector: 3. Single Orientation Analysis

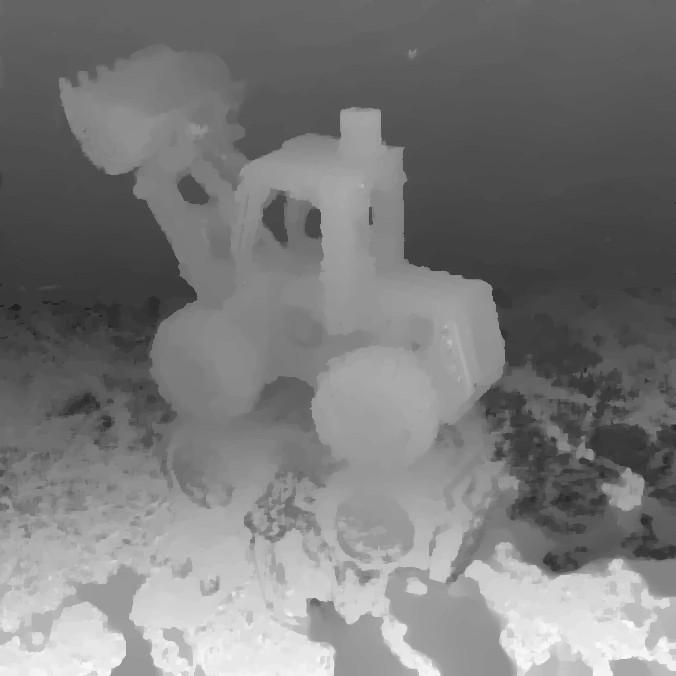
14 view of input light field 3. Single Orientation Analysis ground truth
![multiview stereo [1] [1] T. Pock, D. Cremers, H. Bischof, and A. Chambolle. Global solutions of variational models with convex regularization. SIAM Journal on Imaging Sciences, 2010.](/docs-images/81/83212529/images/15-1.jpg "3. Single Orientation Analysis orientation analysis [2] [2] S. Wanner, B. Goldlücke: Variational Light Field Analysis for Disparity Estimation and Super-Resolution. IEEE TPAMI (2013)")
15 multiview stereo [1] [1] T. Pock, D. Cremers, H. Bischof, and A. Chambolle. Global solutions of variational models with convex regularization. SIAM Journal on Imaging Sciences, Single Orientation Analysis orientation analysis [2] [2] S. Wanner, B. Goldlücke: Variational Light Field Analysis for Disparity Estimation and Super-Resolution. IEEE TPAMI (2013)

16 3. Single Orientation Analysis
17 4. What happens on Mirrors and Transparencies? 4. What happens on Mirrors and Transparencies
18 M : mirror m : point on mirror p : mirrored point p' : virtual point 4. What happens on Mirrors and Transparencies
19 M : mirror m : point on mirror p : mirrored point p' : virtual point 4. What happens on Mirrors and Transparencies
20 5. Double Orientation Analysis 5. Double Orientation Analysis

21 v Observed colors: base color : reflection color : 5. Double Orientation Analysis
22 To recap the model for single orientation: A region of an image has a orientation if and only if for all This orientation is given by the Eigenvector corresponding to the smaller Eigenvalue of the structure tensor But this model fails if 5. Double Orientation Analysis
23 In this case the two orientations, needs to satisfy the condition: and 5. Double Orientation Analysis
24 In this case the two orientations, needs to satisfy the condition: and Which can be solved by analysing the Eigensystem of the second order structure Tensor [1]: [1] Mühlich, Matthias, and Til Aach. "A theory of multiple orientation estimation." Computer Vision ECCV Springer Berlin Heidelberg, Double Orientation Analysis
25 In analogy to the Eigenvector decomposition of the 2D structure tensor, a decomposition of results in an Eigenvector. [1] Mühlich, Matthias, and Til Aach. "A theory of multiple orientation estimation." Computer Vision ECCV Springer Berlin Heidelberg, Double Orientation Analysis
26 In analogy to the Eigenvector decomposition of the 2D structure tensor, a decomposition of results in an Eigenvector The two disparities are then equal to the Eigenvalues. of the matrix: A= [1] Mühlich, Matthias, and Til Aach. "A theory of multiple orientation estimation." Computer Vision ECCV Springer Berlin Heidelberg, Double Orientation Analysis
27 6. Results 6. Results
28 6. Results
29 6. Results

30 Input light field 6. Results single orientation

31 object channel 6. Results reflection channel


32 single orientation object channel 6. Results reflection channel


33 single orientation object channel 6. Results reflection channel

34 single orientation 6. Results

35 transparent channel 6. Results object channel
36 7. Conclusion Geometry reconstruction in light fields, using orientation analysis instead of matching Transparencies and Reflections maps double orientation pattern on epipolar planes. Patterns can be analyzed efficiently by decomposing a second order structure tensor. We provide a benchmark database containing simulated and real world light fields Conclusion
Epipolar Geometry CSE P576. Dr. Matthew Brown
 Epipolar Geometry CSE P576 Dr. Matthew Brown Epipolar Geometry Epipolar Lines, Plane Constraint Fundamental Matrix, Linear solution + RANSAC Applications: Structure from Motion, Stereo [ Szeliski 11] 2
Epipolar Geometry CSE P576 Dr. Matthew Brown Epipolar Geometry Epipolar Lines, Plane Constraint Fundamental Matrix, Linear solution + RANSAC Applications: Structure from Motion, Stereo [ Szeliski 11] 2
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Structure from Motion. Introduction to Computer Vision CSE 152 Lecture 10
 Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
CS201 Computer Vision Camera Geometry
 CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
CS4495/6495 Introduction to Computer Vision. 3B-L3 Stereo correspondence
 CS4495/6495 Introduction to Computer Vision 3B-L3 Stereo correspondence For now assume parallel image planes Assume parallel (co-planar) image planes Assume same focal lengths Assume epipolar lines are
CS4495/6495 Introduction to Computer Vision 3B-L3 Stereo correspondence For now assume parallel image planes Assume parallel (co-planar) image planes Assume same focal lengths Assume epipolar lines are
Two-View Geometry (Course 23, Lecture D)
") Two-View Geometry (Course 23, Lecture D) Jana Kosecka Department of Computer Science George Mason University http://www.cs.gmu.edu/~kosecka General Formulation Given two views of the scene recover the
Two-View Geometry (Course 23, Lecture D) Jana Kosecka Department of Computer Science George Mason University http://www.cs.gmu.edu/~kosecka General Formulation Given two views of the scene recover the
Multiview Reconstruction
 Multiview Reconstruction Why More Than 2 Views? Baseline Too short low accuracy Too long matching becomes hard Why More Than 2 Views? Ambiguity with 2 views Camera 1 Camera 2 Camera 3 Trinocular Stereo
Multiview Reconstruction Why More Than 2 Views? Baseline Too short low accuracy Too long matching becomes hard Why More Than 2 Views? Ambiguity with 2 views Camera 1 Camera 2 Camera 3 Trinocular Stereo
The Variational Structure of Disparity and Regularization of 4D Light Fields
 2013 IEEE Conference on Computer Vision and Pattern Recognition The Variational Structure of Disparity and Regularization of 4D Light Fields Bastian Goldluecke Sven Wanner Heidelberg Collaboratory for
2013 IEEE Conference on Computer Vision and Pattern Recognition The Variational Structure of Disparity and Regularization of 4D Light Fields Bastian Goldluecke Sven Wanner Heidelberg Collaboratory for
Notes 9: Optical Flow
 Course 049064: Variational Methods in Image Processing Notes 9: Optical Flow Guy Gilboa 1 Basic Model 1.1 Background Optical flow is a fundamental problem in computer vision. The general goal is to find
Course 049064: Variational Methods in Image Processing Notes 9: Optical Flow Guy Gilboa 1 Basic Model 1.1 Background Optical flow is a fundamental problem in computer vision. The general goal is to find
Globally Consistent Depth Labeling of 4D Light Fields
 Globally Consistent Depth Labeling of 4D Light Fields Sven Wanner and Bastian Goldluecke Heidelberg Collaboratory for Image Processing Abstract We present a novel paradigm to deal with depth reconstruction
Globally Consistent Depth Labeling of 4D Light Fields Sven Wanner and Bastian Goldluecke Heidelberg Collaboratory for Image Processing Abstract We present a novel paradigm to deal with depth reconstruction
Efficient Large-Scale Stereo Matching
 Efficient Large-Scale Stereo Matching Andreas Geiger*, Martin Roser* and Raquel Urtasun** *KARLSRUHE INSTITUTE OF TECHNOLOGY **TOYOTA TECHNOLOGICAL INSTITUTE AT CHICAGO KIT University of the State of Baden-Wuerttemberg
Efficient Large-Scale Stereo Matching Andreas Geiger*, Martin Roser* and Raquel Urtasun** *KARLSRUHE INSTITUTE OF TECHNOLOGY **TOYOTA TECHNOLOGICAL INSTITUTE AT CHICAGO KIT University of the State of Baden-Wuerttemberg
Project Updates Short lecture Volumetric Modeling +2 papers
 Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Stereo Scene Flow for 3D Motion Analysis
 Stereo Scene Flow for 3D Motion Analysis Andreas Wedel Daniel Cremers Stereo Scene Flow for 3D Motion Analysis Dr. Andreas Wedel Group Research Daimler AG HPC 050 G023 Sindelfingen 71059 Germany andreas.wedel@daimler.com
Stereo Scene Flow for 3D Motion Analysis Andreas Wedel Daniel Cremers Stereo Scene Flow for 3D Motion Analysis Dr. Andreas Wedel Group Research Daimler AG HPC 050 G023 Sindelfingen 71059 Germany andreas.wedel@daimler.com
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Multiple View Geometry in Computer Vision Second Edition
 Multiple View Geometry in Computer Vision Second Edition Richard Hartley Australian National University, Canberra, Australia Andrew Zisserman University of Oxford, UK CAMBRIDGE UNIVERSITY PRESS Contents
Multiple View Geometry in Computer Vision Second Edition Richard Hartley Australian National University, Canberra, Australia Andrew Zisserman University of Oxford, UK CAMBRIDGE UNIVERSITY PRESS Contents
Today. Stereo (two view) reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography
 reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography") Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Layered Scene Reconstruction from Multiple Light Field Camera Views
 Layered Scene Reconstruction from Multiple Light Field Camera Views Ole Johannsen, Antonin Sulc, Nico Marniok, Bastian Goldluecke University of Konstanz, {firstname.lastname}@uni-konstanz.de The first
Layered Scene Reconstruction from Multiple Light Field Camera Views Ole Johannsen, Antonin Sulc, Nico Marniok, Bastian Goldluecke University of Konstanz, {firstname.lastname}@uni-konstanz.de The first
Mathematics of a Multiple Omni-Directional System
 Mathematics of a Multiple Omni-Directional System A. Torii A. Sugimoto A. Imiya, School of Science and National Institute of Institute of Media and Technology, Informatics, Information Technology, Chiba
Mathematics of a Multiple Omni-Directional System A. Torii A. Sugimoto A. Imiya, School of Science and National Institute of Institute of Media and Technology, Informatics, Information Technology, Chiba
Variational Light Field Analysis for Disparity Estimation and Super-Resolution
 IEEE TRANSACTIONS OF PATTERN ANALYSIS AND MACHINE INTELLIGENCE 1 Variational Light Field Analysis for Disparity Estimation and Super-Resolution Sven Wanner, Member, IEEE, and Bastian Goldluecke, Member,
IEEE TRANSACTIONS OF PATTERN ANALYSIS AND MACHINE INTELLIGENCE 1 Variational Light Field Analysis for Disparity Estimation and Super-Resolution Sven Wanner, Member, IEEE, and Bastian Goldluecke, Member,
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
3D Computer Vision. Dense 3D Reconstruction II. Prof. Didier Stricker. Christiano Gava
 3D Computer Vision Dense 3D Reconstruction II Prof. Didier Stricker Christiano Gava Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Dense 3D Reconstruction II Prof. Didier Stricker Christiano Gava Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Optical flow and depth from motion for omnidirectional images using a TV-L1 variational framework on graphs
 ICIP 2009 - Monday, November 9 Optical flow and depth from motion for omnidirectional images using a TV-L1 variational framework on graphs Luigi Bagnato Signal Processing Laboratory - EPFL Advisors: Prof.
ICIP 2009 - Monday, November 9 Optical flow and depth from motion for omnidirectional images using a TV-L1 variational framework on graphs Luigi Bagnato Signal Processing Laboratory - EPFL Advisors: Prof.
Scalable geometric calibration for multi-view camera arrays
 Scalable geometric calibration for multi-view camera arrays Bernhard Blaschitz, Doris Antensteiner, Svorad Štolc Bernhard.Blaschitz@ait.ac.at AIT Austrian Institute of Technology GmbH Intelligent Vision
Scalable geometric calibration for multi-view camera arrays Bernhard Blaschitz, Doris Antensteiner, Svorad Štolc Bernhard.Blaschitz@ait.ac.at AIT Austrian Institute of Technology GmbH Intelligent Vision
Stereo Matching.
 Stereo Matching Stereo Vision [1] Reduction of Searching by Epipolar Constraint [1] Photometric Constraint [1] Same world point has same intensity in both images. True for Lambertian surfaces A Lambertian
Stereo Matching Stereo Vision [1] Reduction of Searching by Epipolar Constraint [1] Photometric Constraint [1] Same world point has same intensity in both images. True for Lambertian surfaces A Lambertian
Supplemental Material: A Dataset and Evaluation Methodology for Depth Estimation on 4D Light Fields
 Supplemental Material: A Dataset and Evaluation Methodology for Depth Estimation on 4D Light Fields Katrin Honauer 1, Ole Johannsen 2, Daniel Kondermann 1, Bastian Goldluecke 2 1 HCI, Heidelberg University
Supplemental Material: A Dataset and Evaluation Methodology for Depth Estimation on 4D Light Fields Katrin Honauer 1, Ole Johannsen 2, Daniel Kondermann 1, Bastian Goldluecke 2 1 HCI, Heidelberg University
Perception and Action using Multilinear Forms
 Perception and Action using Multilinear Forms Anders Heyden, Gunnar Sparr, Kalle Åström Dept of Mathematics, Lund University Box 118, S-221 00 Lund, Sweden email: {heyden,gunnar,kalle}@maths.lth.se Abstract
Perception and Action using Multilinear Forms Anders Heyden, Gunnar Sparr, Kalle Åström Dept of Mathematics, Lund University Box 118, S-221 00 Lund, Sweden email: {heyden,gunnar,kalle}@maths.lth.se Abstract
Two-view geometry Computer Vision Spring 2018, Lecture 10
 Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Multiview Stereo COSC450. Lecture 8
 Multiview Stereo COSC450 Lecture 8 Stereo Vision So Far Stereo and epipolar geometry Fundamental matrix captures geometry 8-point algorithm Essential matrix with calibrated cameras 5-point algorithm Intersect
Multiview Stereo COSC450 Lecture 8 Stereo Vision So Far Stereo and epipolar geometry Fundamental matrix captures geometry 8-point algorithm Essential matrix with calibrated cameras 5-point algorithm Intersect
Geometry for Computer Vision
 Geometry for Computer Vision Lecture 5b Calibrated Multi View Geometry Per-Erik Forssén 1 Overview The 5-point Algorithm Structure from Motion Bundle Adjustment 2 Planar degeneracy In the uncalibrated
Geometry for Computer Vision Lecture 5b Calibrated Multi View Geometry Per-Erik Forssén 1 Overview The 5-point Algorithm Structure from Motion Bundle Adjustment 2 Planar degeneracy In the uncalibrated
Image Based Reconstruction II
 Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
What have we leaned so far?
 What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
Super-Resolution Keyframe Fusion for 3D Modeling with High-Quality Textures
 Super-Resolution Keyframe Fusion for 3D Modeling with High-Quality Textures Robert Maier, Jörg Stückler, Daniel Cremers International Conference on 3D Vision (3DV) October 2015, Lyon, France Motivation
Super-Resolution Keyframe Fusion for 3D Modeling with High-Quality Textures Robert Maier, Jörg Stückler, Daniel Cremers International Conference on 3D Vision (3DV) October 2015, Lyon, France Motivation
Step-by-Step Model Buidling
 Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
A virtual tour of free viewpoint rendering
 A virtual tour of free viewpoint rendering Cédric Verleysen ICTEAM institute, Université catholique de Louvain, Belgium cedric.verleysen@uclouvain.be Organization of the presentation Context Acquisition
A virtual tour of free viewpoint rendering Cédric Verleysen ICTEAM institute, Université catholique de Louvain, Belgium cedric.verleysen@uclouvain.be Organization of the presentation Context Acquisition
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
Using temporal seeding to constrain the disparity search range in stereo matching
 Using temporal seeding to constrain the disparity search range in stereo matching Thulani Ndhlovu Mobile Intelligent Autonomous Systems CSIR South Africa Email: tndhlovu@csir.co.za Fred Nicolls Department
Using temporal seeding to constrain the disparity search range in stereo matching Thulani Ndhlovu Mobile Intelligent Autonomous Systems CSIR South Africa Email: tndhlovu@csir.co.za Fred Nicolls Department
Epipolar Geometry and Stereo Vision
 CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision
 Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Lecture 10 Multi-view Stereo (3D Dense Reconstruction) Davide Scaramuzza
 Davide Scaramuzza") Lecture 10 Multi-view Stereo (3D Dense Reconstruction) Davide Scaramuzza REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time, ICRA 14, by Pizzoli, Forster, Scaramuzza [M. Pizzoli, C. Forster,
Lecture 10 Multi-view Stereo (3D Dense Reconstruction) Davide Scaramuzza REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time, ICRA 14, by Pizzoli, Forster, Scaramuzza [M. Pizzoli, C. Forster,
Evaluating optical flow vectors through collision points of object trajectories in varying computergenerated snow intensities for autonomous vehicles
 Eingebettete Systeme Evaluating optical flow vectors through collision points of object trajectories in varying computergenerated snow intensities for autonomous vehicles 25/6/2018, Vikas Agrawal, Marcel
Eingebettete Systeme Evaluating optical flow vectors through collision points of object trajectories in varying computergenerated snow intensities for autonomous vehicles 25/6/2018, Vikas Agrawal, Marcel
LUMS Mine Detector Project
 LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
Multiple View Geometry of Projector-Camera Systems from Virtual Mutual Projection
 Multiple View Geometry of rojector-camera Systems from Virtual Mutual rojection Shuhei Kobayashi, Fumihiko Sakaue, and Jun Sato Department of Computer Science and Engineering Nagoya Institute of Technology
Multiple View Geometry of rojector-camera Systems from Virtual Mutual rojection Shuhei Kobayashi, Fumihiko Sakaue, and Jun Sato Department of Computer Science and Engineering Nagoya Institute of Technology
3D reconstruction how accurate can it be?
 Performance Metrics for Correspondence Problems 3D reconstruction how accurate can it be? Pierre Moulon, Foxel CVPR 2015 Workshop Boston, USA (June 11, 2015) We can capture large environments. But for
Performance Metrics for Correspondence Problems 3D reconstruction how accurate can it be? Pierre Moulon, Foxel CVPR 2015 Workshop Boston, USA (June 11, 2015) We can capture large environments. But for
Structured light , , Computational Photography Fall 2017, Lecture 27
 Structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 27 Course announcements Homework 5 has been graded. - Mean: 129. - Median:
Structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 27 Course announcements Homework 5 has been graded. - Mean: 129. - Median:
CS 231A Computer Vision (Winter 2015) Problem Set 2
 Problem Set 2") CS 231A Computer Vision (Winter 2015) Problem Set 2 Due Feb 9 th 2015 11:59pm 1 Fundamental Matrix (20 points) In this question, you will explore some properties of fundamental matrix and derive a minimal
CS 231A Computer Vision (Winter 2015) Problem Set 2 Due Feb 9 th 2015 11:59pm 1 Fundamental Matrix (20 points) In this question, you will explore some properties of fundamental matrix and derive a minimal
Some books on linear algebra
 Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION
 CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION In this chapter we will discuss the process of disparity computation. It plays an important role in our caricature system because all 3D coordinates of nodes
CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION In this chapter we will discuss the process of disparity computation. It plays an important role in our caricature system because all 3D coordinates of nodes
Geometry of Multiple views
 1 Geometry of Multiple views CS 554 Computer Vision Pinar Duygulu Bilkent University 2 Multiple views Despite the wealth of information contained in a a photograph, the depth of a scene point along the
1 Geometry of Multiple views CS 554 Computer Vision Pinar Duygulu Bilkent University 2 Multiple views Despite the wealth of information contained in a a photograph, the depth of a scene point along the
3D Surface Reconstruction from 2D Multiview Images using Voxel Mapping
 74 3D Surface Reconstruction from 2D Multiview Images using Voxel Mapping 1 Tushar Jadhav, 2 Kulbir Singh, 3 Aditya Abhyankar 1 Research scholar, 2 Professor, 3 Dean 1 Department of Electronics & Telecommunication,Thapar
74 3D Surface Reconstruction from 2D Multiview Images using Voxel Mapping 1 Tushar Jadhav, 2 Kulbir Singh, 3 Aditya Abhyankar 1 Research scholar, 2 Professor, 3 Dean 1 Department of Electronics & Telecommunication,Thapar
Coplanar circles, quasi-affine invariance and calibration
 Image and Vision Computing 24 (2006) 319 326 www.elsevier.com/locate/imavis Coplanar circles, quasi-affine invariance and calibration Yihong Wu *, Xinju Li, Fuchao Wu, Zhanyi Hu National Laboratory of
Image and Vision Computing 24 (2006) 319 326 www.elsevier.com/locate/imavis Coplanar circles, quasi-affine invariance and calibration Yihong Wu *, Xinju Li, Fuchao Wu, Zhanyi Hu National Laboratory of
Computer Vision I. Dense Stereo Correspondences. Anita Sellent 1/15/16
 Computer Vision I Dense Stereo Correspondences Anita Sellent Stereo Two Cameras Overlapping field of view Known transformation between cameras From disparity compute depth [ Bradski, Kaehler: Learning
Computer Vision I Dense Stereo Correspondences Anita Sellent Stereo Two Cameras Overlapping field of view Known transformation between cameras From disparity compute depth [ Bradski, Kaehler: Learning
Stereo matching. Francesco Isgrò. 3D Reconstruction and Stereo p.1/21
 Stereo matching Francesco Isgrò 3D Reconstruction and Stereo p.1/21 Structure of a stereo vision system Extract interesting point from each image Determine a set of matching points Compute the fundamental
Stereo matching Francesco Isgrò 3D Reconstruction and Stereo p.1/21 Structure of a stereo vision system Extract interesting point from each image Determine a set of matching points Compute the fundamental
Solving Vision Tasks with variational methods on the GPU
 Solving Vision Tasks with variational methods on the GPU Horst Bischof Inst. f. Computer Graphics and Vision Graz University of Technology Joint work with Thomas Pock, Markus Unger, Arnold Irschara and
Solving Vision Tasks with variational methods on the GPU Horst Bischof Inst. f. Computer Graphics and Vision Graz University of Technology Joint work with Thomas Pock, Markus Unger, Arnold Irschara and
Finally: Motion and tracking. Motion 4/20/2011. CS 376 Lecture 24 Motion 1. Video. Uses of motion. Motion parallax. Motion field
 Finally: Motion and tracking Tracking objects, video analysis, low level motion Motion Wed, April 20 Kristen Grauman UT-Austin Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys, and S. Lazebnik
Finally: Motion and tracking Tracking objects, video analysis, low level motion Motion Wed, April 20 Kristen Grauman UT-Austin Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys, and S. Lazebnik
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Recap from Previous Lecture
 Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
A Theory of Multi-Layer Flat Refractive Geometry
 A Theory of Multi-Layer Flat Refractive Geometry Axis Amit Agrawal Srikumar Ramalingam Yuichi Taguchi Visesh Chari Mitsubishi Electric Research Labs (MERL) INRIA Imaging with Refractions Source: Shortis
A Theory of Multi-Layer Flat Refractive Geometry Axis Amit Agrawal Srikumar Ramalingam Yuichi Taguchi Visesh Chari Mitsubishi Electric Research Labs (MERL) INRIA Imaging with Refractions Source: Shortis
Machine vision. Summary # 11: Stereo vision and epipolar geometry. u l = λx. v l = λy
 1 Machine vision Summary # 11: Stereo vision and epipolar geometry STEREO VISION The goal of stereo vision is to use two cameras to capture 3D scenes. There are two important problems in stereo vision:
1 Machine vision Summary # 11: Stereo vision and epipolar geometry STEREO VISION The goal of stereo vision is to use two cameras to capture 3D scenes. There are two important problems in stereo vision:
Geometric camera models and calibration
 Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Chaplin, Modern Times, 1936
 Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Lecture 10 Dense 3D Reconstruction
 Institute of Informatics Institute of Neuroinformatics Lecture 10 Dense 3D Reconstruction Davide Scaramuzza 1 REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time M. Pizzoli, C. Forster,
Institute of Informatics Institute of Neuroinformatics Lecture 10 Dense 3D Reconstruction Davide Scaramuzza 1 REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time M. Pizzoli, C. Forster,
Model Selection for Automated Architectural Reconstruction from Multiple Views
 Model Selection for Automated Architectural Reconstruction from Multiple Views Tomáš Werner, Andrew Zisserman Visual Geometry Group, University of Oxford Abstract We describe progress in automatically
Model Selection for Automated Architectural Reconstruction from Multiple Views Tomáš Werner, Andrew Zisserman Visual Geometry Group, University of Oxford Abstract We describe progress in automatically
An Overview of Matchmoving using Structure from Motion Methods
 An Overview of Matchmoving using Structure from Motion Methods Kamyar Haji Allahverdi Pour Department of Computer Engineering Sharif University of Technology Tehran, Iran Email: allahverdi@ce.sharif.edu
An Overview of Matchmoving using Structure from Motion Methods Kamyar Haji Allahverdi Pour Department of Computer Engineering Sharif University of Technology Tehran, Iran Email: allahverdi@ce.sharif.edu
An Evaluation of Robust Cost Functions for RGB Direct Mapping
 An Evaluation of Robust Cost Functions for RGB Direct Mapping Alejo Concha and Javier Civera Abstract The so-called direct SLAM methods have shown an impressive performance in estimating a dense 3D reconstruction
An Evaluation of Robust Cost Functions for RGB Direct Mapping Alejo Concha and Javier Civera Abstract The so-called direct SLAM methods have shown an impressive performance in estimating a dense 3D reconstruction
Joint 3D-Reconstruction and Background Separation in Multiple Views using Graph Cuts
 Joint 3D-Reconstruction and Background Separation in Multiple Views using Graph Cuts Bastian Goldlücke and Marcus A. Magnor Graphics-Optics-Vision Max-Planck-Institut für Informatik, Saarbrücken, Germany
Joint 3D-Reconstruction and Background Separation in Multiple Views using Graph Cuts Bastian Goldlücke and Marcus A. Magnor Graphics-Optics-Vision Max-Planck-Institut für Informatik, Saarbrücken, Germany
CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018
 Qixing Huang August 29 th 2018") CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018 3D Vision Understanding geometric relations between images and the 3D world between images Obtaining 3D information
CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018 3D Vision Understanding geometric relations between images and the 3D world between images Obtaining 3D information
Robust Poisson Surface Reconstruction
 Robust Poisson Surface Reconstruction V. Estellers, M. Scott, K. Tew, and S. Soatto Univeristy of California, Los Angeles Brigham Young University June 2, 2015 1/19 Goals: Surface reconstruction from noisy
Robust Poisson Surface Reconstruction V. Estellers, M. Scott, K. Tew, and S. Soatto Univeristy of California, Los Angeles Brigham Young University June 2, 2015 1/19 Goals: Surface reconstruction from noisy
Comments on Consistent Depth Maps Recovery from a Video Sequence
 Comments on Consistent Depth Maps Recovery from a Video Sequence N.P. van der Aa D.S. Grootendorst B.F. Böggemann R.T. Tan Technical Report UU-CS-2011-014 May 2011 Department of Information and Computing
Comments on Consistent Depth Maps Recovery from a Video Sequence N.P. van der Aa D.S. Grootendorst B.F. Böggemann R.T. Tan Technical Report UU-CS-2011-014 May 2011 Department of Information and Computing
Stereo and structured light
 Stereo and structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 20 Course announcements Homework 5 is still ongoing. - Make sure
Stereo and structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 20 Course announcements Homework 5 is still ongoing. - Make sure
Visualization 2D-to-3D Photo Rendering for 3D Displays
 Visualization 2D-to-3D Photo Rendering for 3D Displays Sumit K Chauhan 1, Divyesh R Bajpai 2, Vatsal H Shah 3 1 Information Technology, Birla Vishvakarma mahavidhyalaya,sumitskc51@gmail.com 2 Information
Visualization 2D-to-3D Photo Rendering for 3D Displays Sumit K Chauhan 1, Divyesh R Bajpai 2, Vatsal H Shah 3 1 Information Technology, Birla Vishvakarma mahavidhyalaya,sumitskc51@gmail.com 2 Information
Geometry based Repetition Detection for Urban Scene
 Geometry based Repetition Detection for Urban Scene Changchang Wu University of Washington Jan Michael Frahm UNC Chapel Hill Marc Pollefeys ETH Zürich Related Work Sparse Feature Matching [Loy et al. 06,
Geometry based Repetition Detection for Urban Scene Changchang Wu University of Washington Jan Michael Frahm UNC Chapel Hill Marc Pollefeys ETH Zürich Related Work Sparse Feature Matching [Loy et al. 06,
What is Computer Vision?
 Perceptual Grouping in Computer Vision Gérard Medioni University of Southern California What is Computer Vision? Computer Vision Attempt to emulate Human Visual System Perceive visual stimuli with cameras
Perceptual Grouping in Computer Vision Gérard Medioni University of Southern California What is Computer Vision? Computer Vision Attempt to emulate Human Visual System Perceive visual stimuli with cameras
Epipolar Geometry in Stereo, Motion and Object Recognition
 Epipolar Geometry in Stereo, Motion and Object Recognition A Unified Approach by GangXu Department of Computer Science, Ritsumeikan University, Kusatsu, Japan and Zhengyou Zhang INRIA Sophia-Antipolis,
Epipolar Geometry in Stereo, Motion and Object Recognition A Unified Approach by GangXu Department of Computer Science, Ritsumeikan University, Kusatsu, Japan and Zhengyou Zhang INRIA Sophia-Antipolis,
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Application questions. Theoretical questions
 The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
Final project bits and pieces
 Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
Announcements. Stereo
 Announcements Stereo Homework 2 is due today, 11:59 PM Homework 3 will be assigned today Reading: Chapter 7: Stereopsis CSE 152 Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where relative
Announcements Stereo Homework 2 is due today, 11:59 PM Homework 3 will be assigned today Reading: Chapter 7: Stereopsis CSE 152 Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where relative
Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923
 Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923 Teesta suspension bridge-darjeeling, India Mark Twain at Pool Table", no date, UCR Museum of Photography Woman getting eye exam during
Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923 Teesta suspension bridge-darjeeling, India Mark Twain at Pool Table", no date, UCR Museum of Photography Woman getting eye exam during
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Reminder: Lecture 20: The Eight-Point Algorithm. Essential/Fundamental Matrix. E/F Matrix Summary. Computing F. Computing F from Point Matches
 Reminder: Lecture 20: The Eight-Point Algorithm F = -0.00310695-0.0025646 2.96584-0.028094-0.00771621 56.3813 13.1905-29.2007-9999.79 Readings T&V 7.3 and 7.4 Essential/Fundamental Matrix E/F Matrix Summary
Reminder: Lecture 20: The Eight-Point Algorithm F = -0.00310695-0.0025646 2.96584-0.028094-0.00771621 56.3813 13.1905-29.2007-9999.79 Readings T&V 7.3 and 7.4 Essential/Fundamental Matrix E/F Matrix Summary
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Fast Stereo Matching of Feature Links
 Fast Stereo Matching of Feature Links 011.05.19 Chang-il, Kim Introduction Stereo matching? interesting topics of computer vision researches To determine a disparity between stereo images A fundamental
Fast Stereo Matching of Feature Links 011.05.19 Chang-il, Kim Introduction Stereo matching? interesting topics of computer vision researches To determine a disparity between stereo images A fundamental
3D and Appearance Modeling from Images
 3D and Appearance Modeling from Images Peter Sturm 1,Amaël Delaunoy 1, Pau Gargallo 2, Emmanuel Prados 1, and Kuk-Jin Yoon 3 1 INRIA and Laboratoire Jean Kuntzmann, Grenoble, France 2 Barcelona Media,
3D and Appearance Modeling from Images Peter Sturm 1,Amaël Delaunoy 1, Pau Gargallo 2, Emmanuel Prados 1, and Kuk-Jin Yoon 3 1 INRIA and Laboratoire Jean Kuntzmann, Grenoble, France 2 Barcelona Media,
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Vehicle Dimensions Estimation Scheme Using AAM on Stereoscopic Video
 Workshop on Vehicle Retrieval in Surveillance (VRS) in conjunction with 2013 10th IEEE International Conference on Advanced Video and Signal Based Surveillance Vehicle Dimensions Estimation Scheme Using
Workshop on Vehicle Retrieval in Surveillance (VRS) in conjunction with 2013 10th IEEE International Conference on Advanced Video and Signal Based Surveillance Vehicle Dimensions Estimation Scheme Using
is used in many dierent applications. We give some examples from robotics. Firstly, a robot equipped with a camera, giving visual information about th
 Geometry and Algebra of Multiple Projective Transformations Anders Heyden Dept of Mathematics, Lund University Box 8, S-22 00 Lund, SWEDEN email: heyden@maths.lth.se Supervisor: Gunnar Sparr Abstract In
Geometry and Algebra of Multiple Projective Transformations Anders Heyden Dept of Mathematics, Lund University Box 8, S-22 00 Lund, SWEDEN email: heyden@maths.lth.se Supervisor: Gunnar Sparr Abstract In
3D Computer Vision. Structure from Motion. Prof. Didier Stricker
 3D Computer Vision Structure from Motion Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Structure
3D Computer Vision Structure from Motion Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Structure
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Accurate Depth and Normal Maps from Occlusion-Aware Focal Stack Symmetry
 Accurate Depth and Normal Maps from Occlusion-Aware Focal Stack Symmetry Michael Strecke, Anna Alperovich, and Bastian Goldluecke University of Konstanz firstname.lastname@uni-konstanz.de Abstract We introduce
Accurate Depth and Normal Maps from Occlusion-Aware Focal Stack Symmetry Michael Strecke, Anna Alperovich, and Bastian Goldluecke University of Konstanz firstname.lastname@uni-konstanz.de Abstract We introduce
Dense Lightfield Disparity Estimation using Total Variation Regularization
 Dense Lightfield Disparity Estimation using Total Variation Regularization Nuno Barroso Monteiro 1,2, João Pedro Barreto 2, and José Gaspar 1 1 Institute for Systems and Robotics, Univ. of Lisbon, Portugal
Dense Lightfield Disparity Estimation using Total Variation Regularization Nuno Barroso Monteiro 1,2, João Pedro Barreto 2, and José Gaspar 1 1 Institute for Systems and Robotics, Univ. of Lisbon, Portugal
Rectification and Disparity
 Rectification and Disparity Nassir Navab Slides prepared by Christian Unger What is Stereo Vision? Introduction A technique aimed at inferring dense depth measurements efficiently using two cameras. Wide
Rectification and Disparity Nassir Navab Slides prepared by Christian Unger What is Stereo Vision? Introduction A technique aimed at inferring dense depth measurements efficiently using two cameras. Wide
How to Compute the Pose of an Object without a Direct View?
 How to Compute the Pose of an Object without a Direct View? Peter Sturm and Thomas Bonfort INRIA Rhône-Alpes, 38330 Montbonnot St Martin, France {Peter.Sturm, Thomas.Bonfort}@inrialpes.fr Abstract. We
How to Compute the Pose of an Object without a Direct View? Peter Sturm and Thomas Bonfort INRIA Rhône-Alpes, 38330 Montbonnot St Martin, France {Peter.Sturm, Thomas.Bonfort}@inrialpes.fr Abstract. We
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week